AMR传感器
amr的运用

amr的运用AMR(Autonomous Mobile Robot)是一种具有自主移动能力的机器人,可以在没有人类干预的情况下执行各种任务。
AMR的运用范围广泛,涵盖了工业、物流、医疗等多个领域。
在工业领域,AMR可以用于自动化生产线上的物料搬运。
传统的生产线通常需要人工操作来移动物料,但是随着技术的进步,AMR可以取代人工,提高生产效率和质量。
AMR可以通过激光雷达等传感器感知周围环境,并根据预设的路径规划自主移动,将物料从一个工作站运送到另一个工作站,从而减少了人工操作的时间和错误率。
在物流领域,AMR可以用于仓库中的货物搬运和分拣。
传统的仓库操作通常需要大量的人力,而且容易出错。
而引入AMR后,它可以根据仓库中的布局和货物的位置,通过自主导航和路径规划,快速准确地将货物从一个货架运送到另一个货架,或者将货物分拣到不同的区域。
这不仅提高了物流效率,还减少了人力成本和错误率。
在医疗领域,AMR可以用于医院内的药品和物资的运送。
传统的医院物流需要人工搬运,但是这样容易导致交叉感染和药品错误。
引入AMR后,它可以根据医院的布局和需求,自主规划路径,将药品和物资送到指定的区域。
而且AMR可以配备传感器和监控系统,可以实时监测药品和物资的温度、湿度等参数,确保其质量和安全。
除了以上几个领域,AMR还可以应用于家庭服务、安防巡逻、农业等领域。
在家庭服务方面,AMR可以帮助老年人和残疾人照料生活起居,提供日常的照料和陪伴。
在安防巡逻方面,AMR可以代替人工巡逻,通过搭载摄像头和传感器监测周围环境,及时发现异常情况。
在农业方面,AMR可以用于农田的播种、除草和采摘,提高农业生产效率。
然而,AMR的运用也面临一些挑战和限制。
首先,AMR的成本较高,不是所有企业或机构都能承担。
其次,AMR在复杂环境下的自主导航和路径规划仍然存在技术难题,需要进一步的研究和改进。
另外,AMR在与人类共同工作时,需要考虑安全性和人机协作的问题,确保人机之间的合作和沟通。
amr安全防护原理

AMR (Autonomous Mobile Robots) 安全防护原理是确保自主移动机器人在操作过程中安全运行的一种原则和方法。
以下是一些常见的AMR 安全防护原理:
1.传感技术:AMR 配备了各种传感器,如激光雷达、红外线传感器、摄像头等,用于实
时感知周围环境和障碍物。
这使得AMR 能够检测到人员、设备、墙壁等,并做出相应的反应以避免碰撞或其他危险情况。
2.防撞装置:AMR 在其外部结构上安装了防撞装置,如柔性保护罩和缓冲材料,以减轻
碰撞带来的伤害和损坏。
当AMR 接近障碍物或发生碰撞时,防撞装置能够吸收冲击力,并减少潜在的伤害。
3.规划和路径规划:AMR 使用先进的算法和路径规划技术来计算最佳路径,并避开障碍
物。
通过包括环境地图、规划算法和避障策略,AMR 可以避免与人员或其他物体发生碰撞。
4.紧急停止系统:AMR 配备了紧急停止按钮或其他紧急停止机制,以便在出现危险情况
时能够立即停止运动。
当人员或监控系统检测到潜在的危险时,可以通过触发紧急停止系统来停止AMR 的运行。
5.安全培训和操作规程:对AMR 运营人员进行安全培训非常重要。
他们需要了解AMR
的工作原理、安全操作程序和紧急事故处理方法。
定期的安全培训和更新操作规程,确保所有操作员都具备正确的安全意识和应急响应能力。
这些原理和方法共同确保AMR 在工作环境中能够安全地运行,并与人员和其他设备有效地协作,减少事故风险并提高工作效率。
amr传感器原理

amr传感器原理
AMR磁电阻传感器是一种基于安培定律的传感器,它的工作原理是利用磁场作用于特
定材料时的磁阻变化来测量磁场的强度。
AMR传感器使用了一种叫做铁磁电阻材料的材料,这种材料对于磁场的敏感度非常高,可以成功地将磁场的变化转化为电信号。
AMR传感器是由两个铁磁电阻层夹着一个非磁性的金属层构成的。
在没有磁场的情况下,两个铁磁电阻层中的电阻是相等的,当磁场强度发生变化时,铁磁电阻材料中的自转
磁矩会发生变化,同时由于磁阻材料自身的特性,电阻值也会随之变化。
这种变化可以通
过连接在铁磁电阻材料的两端的电路来实现信号的读取和处理。
当磁场变化越大,电阻值
变化就越大,输出的电信号也就越大。
AMR传感器广泛应用于自动化控制系统中,特别是在测量磁场变化的过程中。
比如在
电动机中,AMR传感器可以用来测量电动机的转速,因为电动机的旋转会产生磁场的变化。
又如在磁存储器中,AMR传感器可以用来读取磁盘数据,因为磁盘上的数据是记录在磁场
中的。
此外,AMR传感器还广泛应用于磁导航、地理勘探、气象观测等领域。
总之,AMR传感器的工作原理非常简单,但是它的稳定性和精度很高,使得它在自动
控制系统中具备非常重要的地位。
由于AMR传感器的输出信号范围宽,解析度高,而且功
耗低、价格便宜等优点,使其得到了广泛的应用和研究。
amr 电流传感器原理
amr 电流传感器原理AMR电流传感器原理引言:AMR电流传感器是一种用于测量电流的传感器,它采用了先进的AMR(Anisotropic Magneto-Resistive)技术,能够精确地测量电流的大小。
本文将详细介绍AMR电流传感器的工作原理。
一、AMR电流传感器的结构AMR电流传感器通常由磁致伸缩效应材料、磁场感应元件、信号调理电路和输出端口组成。
1. 磁致伸缩效应材料:磁致伸缩效应材料是一种能够在外加磁场作用下发生尺寸变化的材料。
在AMR电流传感器中,磁致伸缩效应材料被用作电流感应元件。
2. 磁场感应元件:磁场感应元件通常由多个磁致伸缩效应材料组成,这些材料排列在一个特定的方式,以便测量电流时能够产生足够的磁场变化。
3. 信号调理电路:信号调理电路用于将磁场感应元件产生的微弱信号放大,并进行滤波、放大和线性化处理,以便得到可靠的电流测量结果。
4. 输出端口:输出端口连接到信号调理电路,将处理后的电流信号输出给外部设备进行进一步处理或显示。
二、AMR电流传感器的工作原理AMR电流传感器的工作原理基于AMR效应。
当通过AMR电流传感器的导线中有电流流过时,电流会产生磁场,这个磁场会导致感应元件中的磁致伸缩效应材料发生尺寸变化。
这种尺寸变化会引起材料的电阻发生变化,即AMR效应。
AMR效应是指在外加磁场的作用下,材料的电阻随着磁场的变化而发生变化。
当电流通过AMR电流传感器时,导线周围会产生一个磁场,这个磁场会导致感应元件中的磁致伸缩效应材料的电阻发生变化。
通过测量电阻变化,就可以得到电流的大小。
三、AMR电流传感器的优势AMR电流传感器相比于传统的电流传感器具有以下优势:1. 高精度:AMR电流传感器采用了AMR效应测量电流,可以实现更高的精度和稳定性。
2. 快速响应:由于AMR效应的特性,AMR电流传感器具有快速响应的特点,可以快速准确地测量电流的变化。
3. 宽测量范围:AMR电流传感器具有较宽的测量范围,可以满足不同场景下的电流测量需求。
耐用的amr机器人原理

耐用的amr机器人原理
AMR(Automated Mobile Robot)是一种具有自主导航和移动能力的机器人。
其原理主要包括以下几个方面:
1. 自主导航:AMR通过搭载定位系统(如激光雷达、相机、超声波传感器等)来感知周围环境,并使用SLAM(Simultaneous Localization and Mapping)算法进行建图和定位。
通过实时获取的环境信息和地图,AMR能够规划路径并实现自主导航。
2. 机械结构:AMR通常采用多轮驱动的底盘结构,每个轮子都可以独立驱动。
这种设计使得AMR具有良好的机动性,可以在不同地形和环境中灵活运动,并且能够轻松旋转、平移以及避开障碍物。
3. 感知与识别:AMR配备了各种传感器,如激光雷达、相机、红外传感器等,用于感知环境中的障碍物、目标位置等信息,并进行实时处理。
通过机器视觉、深度学习等技术,AMR还可以实现物体识别、人脸识别、语音识别等高级感知功能。
4. 控制系统:AMR的控制系统包括硬件和软件两部分。
硬件部分主要包括传感器、执行器和通信模块等,用于接收和发送信息。
软件部分主要包括导航算法、路径规划算法、感知处理算法等,用于实现AMR的智能控制和决策。
5. 电源系统:AMR通常使用锂电池或者超级电容器作为能源供应,以提供足够的电力支持机器人的移动和工作。
综上所述,AMR的原理主要包括自主导航、机械结构、感知与识别、控制系统和电源系统等方面,通过这些技术的结合和协同,AMR可以实现具有自主导航和移动能力的耐用机器人。
amr工作流程

AMR(Autonomous Mobile Robot,自主移动机器人)的工作流程通常涉及多个步骤,从感知、决策到执行。
以下是一个简化的AMR工作流程概述:1. 感知(Perception):AMR通过各种传感器来感知周围环境。
传感器的类型可能包括:-激光雷达:用于测量距离和创建环境地图。
-摄像头:用于视觉感知,可以进行目标检测、障碍物识别等。
-超声波传感器:用于测量距离,避免碰撞。
-惯性导航系统:用于测量和跟踪机器人的运动。
2. 地图构建(Mapping):通过激光雷达等传感器获取的数据,AMR能够构建环境地图。
地图可以是静态的,也可以是动态更新的,根据机器人移动时收集到的信息进行更新。
3. 定位(Localization):AMR使用传感器数据和地图信息,以及可能的SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)算法,来确定自己在环境中的准确位置。
4. 路径规划(Path Planning):基于目标位置和当前位置,AMR使用路径规划算法确定最优路径。
路径规划考虑到避免障碍物、优化行进路径,以及可能的动态环境变化。
5. 决策(Decision Making):AMR根据感知到的环境信息、目标位置以及路径规划结果做出决策。
决策包括确定何时停下、何时转弯、何时避让障碍物等。
6. 执行(Execution):AMR将决策转化为实际的运动控制。
这可能涉及到底层的电机和轮子控制,以及可能的操纵臂、抓取装置等执行器。
7. 监控和反馈(Monitoring and Feedback):AMR不断地监控自己的状态、环境变化和执行结果,并根据需要进行调整。
这包括检测可能的异常情况、处理错误,并与中央控制系统或其他机器人进行通信。
8. 交互与通信(Interaction and Communication):AMR可能需要与其他机器人、设备或中央控制系统进行通信。
AMR传感器在UBM线性扫描探头中的应用

传感器与微 系统 ( T r a n s d u c e r a n d Mi c r o s y s t e m T e c h n o l o g i e s )
2 0 1 3年 第 3 2卷 第 2期
I , j
应
用
技 一术 ~
AMR传 感 器 在 U B M 线 性 扫 描探 头 中的应 用
据进行采集 , 利用单 片机对采集 到的数据进行 数字滤 波 、 线 性校正 , 输 出控 制信号 。实 验表 明 : 基于 A MR
传感器检测位移 的方法能够精确检测超声换能器 的位移 , 实时性好 。 关键词 :各 向异性磁 电阻效应 ;非接触式 ; 线性位移 中图分类号 :T P 2 1 2 . 9 文献标识码 :B 文章编号 :1 0 0 0 - 9 7 8 7 ( 2 0 1 3 ) 0 2 - - 0 1 4 6 - 0 3
柳 青 青 ,郑 政
( 上 海理 工大 学 医疗 器 械 与食 品 学 院 , 上海 2 0 0 0 9 3 )
摘
要 :根据各 向异性磁 电阻( A MR ) 传感器的基本原理 , 提 出一种非接触式测量活体超声显微镜 ( U B M)
中超声换能器线性位移 的方法 。通过单片机 P I C 1 6 F 1 8 2 7和 A MR组 成的硬件 电路 对 A MRห้องสมุดไป่ตู้ 性传感 器数
Ab s t r a c t :A c c o r d i n g t o t h e u h i ma t e p r i n c i p l e o f a n i s o t r o p y m a g n e t o r e s i s t a n c e( A MR) e f f e c t , a n o n — c o n t a c t
磁传感器(霍尔或磁阻即AMR或GMR或TMR或GMI)在家电、电器中的应用——新磁

如加热器和强力淋浴的浴室用具使用磁传感器Magnetic sensor流量传感器。淋浴打开,流量传感器检测到的信号可以被用来关闭加热器或喷淋泵。除了接通加热器,热舌簧开关可以用来切进切出的加热器,以保持水在一个舒适的温度。淋浴时是关闭的,将感测的流量开关打开加热器或泵关闭。
电动牙刷改变电机方向
洗衣机振动检测
磁传感器Magnetic sensor被用于在双向振动传感器。磁铁和一个非常精确的张力弹簧插入的圆筒状的壳体,两端密封。这些筒状的两个组件,磁铁面对相反的方向的磁传感器Magnetic sensor的任一侧上。根据需要被感测到的振动的振幅的不同,使用不同的拉伸弹簧。在干燥循环期间,当滚筒洗衣机的振动超过一个极限,洗衣机本身将开始走动,磁铁致动磁传感器开关Magnetic sensor switch。振动传感器可内置,检测从1G到10G的震动,常开和常闭版本。
关于器件选型与资询可以关注新磁
电饭煲加热器控制
大米煮熟后,电饭煲需要保持大米的温度70°C。这可以通过使用热磁传感器开关Magnetic sensor switch的切断,在75℃切断并在65℃切入。这种打开和关闭信号可以被用来触发一个继电器或接触器直接切换加热器。也有一些电饭煲磁传感器Magnetic sensor检测盖子是否已经正确放置,使加热器连续接通。
电器门位置传感
在洗衣机和洗碗机,处理器需要知道门被关闭,所以可以启动和自动循环水可以被泵入系统。在冰箱和冰柜,稍微离开一扇门虚掩着,可能会破坏里面大量的冷冻品。磁传感器Magnetic sensor安装在门上的家电和磁铁可以解决所有这些问题。此外,该磁传感器开关Magnetic sensor switch传感器也可以被用来触发家用电器,如冰箱内的灯。
AMR磁阻传感器 (磁性开关IC) 产品原理及应用
AMR磁阻传感器 (磁性开关IC) 产品原理及应用
作者胡汉首机和Q/Q都是_1560.183.7360
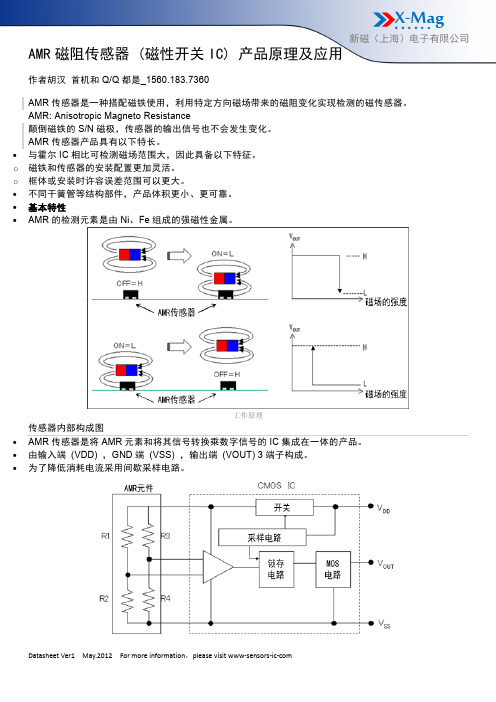
AMR传感器是一种搭配磁铁使用,利用特定方向磁场带来的磁阻变化实现检测的磁传感器。
AMR: Anisotropic Magneto Resistance
颠倒磁铁的S/N磁极,传感器的输出信号也不会发生变化。
AMR传感器产品具有以下特长。
∙与霍尔IC相比可检测磁场范围大,因此具备以下特征。
o磁铁和传感器的安装配置更加灵活。
o框体或安装时许容误差范围可以更大。
∙不同干簧管等结构部件,产品体积更小、更可靠。
∙基本特性
∙AMR的检测元素是由Ni、Fe组成的强磁性金属。
工作原理
传感器内部构成图
∙AMR传感器是将AMR元素和将其信号转换乘数字信号的IC集成在一体的产品。
∙由输入端(VDD) ,GND端(VSS) ,输出端(VOUT) 3端子构成。
∙为了降低消耗电流采用间歇采样电路。
∙当传感器远离磁铁时,磁场强度低于MRP时,VOUT从L变为H。
UP 与霍尔IC的区别
设计的更小更薄。
使用例∙
UP
应用实例
最适合作为移动电子产品的非接触开关。
开合检测
∙手机,笔记本电脑,数码相机等
∙电冰箱,洗衣机等各种家电产品
∙门窗防盗等安防装置
旋转检测
∙智能燃气表
∙智能水表等。
agv和amr的区别

agv和amr的区别
AMR是自主移动机器人的缩写。
它是一种使用机载传感器和处理器自主移动材料的车辆,不需要任何物理引导或任何其他标记。
AMR非常聪明,它们可以识别并同时对人、汽车等作出反应。
它们安全地完成所有工作,不依赖于周围环境的繁忙程度。
它们可以做一些不可预测的事情,如跟随一个特定的人去他们需要去的地方,可以理解环境。
自动导引车(AGV)
AGV是自动导引车的意思。
它是一种可移动的机器人,遵循地板上的标记线或电线,使用无线电波、视觉摄像机、磁铁或激光进行导航。
它们通常执行典型的任务,而这些任务是很难用手动小车来完成的。
它们在工业中被高度用于运输原材料。
他们需要仓库进行适当和有效的导航,以便保持安全。
amr概念

amr概念
AMR(Autonomous Mobile Robot)即自主移动机器人,是一种基于AI智能算法,集环境感知、动态决策、行为控制与自主执行等多功能于一体的综合机器人系统。
AMR具有强大的自主计算能力,可以通过传感器感知周围环境并作出相应的智能决策,在非预设路线上自主决策,独立完成任务。
AMR在实际应用中具有许多优势。
首先,部署难度低,因为AMR可以自主规划路线,所以部署起来十分简单,只需在软件层面绘制出地图,部署成本并不会增加。
其次,AMR的动态规划路线、地图上任意点即可定位的特点使其更柔性、便捷和快速,可快速适应业务变化。
此外,AMR在作业点位、设备数量和人机协同等方面也具有显著的优势。
企业在选择AMR产品时,需要考虑产品的安全性、稳定性、鲁棒性、使用率以及易维护性等。
同时,品牌效应也是客户采购时重要的考虑因素之一。
总的来说,AMR是一种先进的机器人技术,具有广泛的应用前景。
微型电流传感器AMR探头芯片研究与测试

㊀2020年㊀第10期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2020㊀No 10㊀基金项目:山东省科技重大创新工程(2017CXGC0807,2017CXGC0903,2018CXGC0601)收稿日期:2019-08-05微型电流传感器AMR探头芯片研究与测试王㊀浩1,2,王茂励1,3,董振振1,2,钟贻兵4,程广河2(1.青岛理工大学信息与控制工程学院,山东青岛㊀266520;2.齐鲁工业大学(山东省科学院),山东省计算中心(国家超级计算济南中心),山东省计算机网络重点实验室,山东济南㊀250014;3.曲阜师范大学信息与控制工程学院,山东日照㊀276800;4.山东航天电子技术研究院,山东烟台㊀264000)㊀㊀摘要:随着电流传感器在航天器的大量应用,电流传感器的测量精度和尺寸成为了航天器研发的重点㊂传统的电流传感器主要分为电阻直接测量的分流器和霍尔电流传感器:电阻直接测量方式无法实现电隔离,电阻的失效会断开被检测电流回路,而且采样电阻的精度直接影响到测量的最终精度㊂而霍尔效应原理电流传感器虽然使用磁隔离测量方式,但体积较大㊂随着电流传感器的应用场合越来越多,直接影响到了航天器单机设备的体积和质量㊂在整个传感器设计中,探头芯片的性能决定了传感器的性能㊂文中基于AMR探头芯片,提出了Barber电极的设计方案,并制作AMR惠斯登桥式电路,采用梯度测量方式提高探头抗干扰能力㊂通过对AMR探头芯片进行测试,并对结果进行记录和分析㊂测试结果表明,文中设计的探头芯片的线性度绝对值优于1%,满足航天器微型电流传感器对探头芯片的性能需求㊂关键词:微型电流传感器;AMR探头芯片;Barber电极;惠斯登桥;梯度测量;线性度中图分类号:TP212㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2020)10-0008-05ResearchandTestofAMRProbeChipofMicroCurrentSensorWANGHao1,2,WANGMao⁃li1,3,DONGZhen⁃zhen1,2,ZHONGYi⁃bing4,CHENGGuang⁃he2(1.SchoolofInformationandControlEngineering,QingdaoTechnologicalUniversity,Qingdao266520,China;2.QiluUniversityofTechnology(ShandongAcademyofSciences),ShandongComputerScienceCenter(NationalSupercomputerCenterinJinan),ShandongProvincialKeyLaboratoryofComputerNetworks,Jinan250014,China;3.SchoolofInformationandControlEngineering,QufuNormalUniversity,Rizhao276800,China;4.ShandongInstituteofSpaceElectronicTechnology,Yantai264000,China)Abstract:Withthelargenumberofapplicationsofcurrentsensorsinspacecraft,themeasurementaccuracyandsizeofcur⁃rentsensorshavebecomethefocusofspacecraftresearchanddevelopment.ThetraditionalcurrentsensorismainlydividedintoashuntandaHallcurrentsensorfordirectmeasurementofresistance,thedirectmeasurementmethodoftheresistorcannotachieveelectricalisolation,thefailureoftheresistorwilldisconnectthecurrentlooptobedetected,andtheaccuracyofthesamplingre⁃sistordirectlyaffectsthefinalmeasurementprecision.TheHalleffectprinciplecurrentsensorusesamagneticisolationmeasure⁃mentmethod,butitisbulky.Withtheincreasinguseofcurrentsensors,itdirectlyaffectsthesizeandweightofspacecraftstand⁃aloneequipment.Intheentiresensordesign,theperformanceoftheprobechipdeterminestheperformanceofthesensor.BasedontheAMRprobechip,thispaperproposesthedesignschemeofBarberelectrode,andmakesAMRWheatstonebridgecircuit,whichusesgradientmeasurementtoimprovetheanti⁃interferenceabilityoftheprobe.TheAMRprobechipwastestedandthere⁃sultsrecordedandanalyzed.Thetestresultsshowthattheabsolutevalueofthelinearityoftheprobechipdesignedinthispaperisbetterthan1%,whichsatisfiestheperformancerequirementsofthespacecraftminiaturecurrentsensorfortheprobechip.Keywords:microcurrentsensor;AMRprobechip;Barberelectrode;Wheatstonebridge;gradientmeasurement;linearity0㊀引言随着航天技术的进步,电流传感器在航天器中使用的越来越多,电流传感器在航天系统中展现出了越来越重要的使用价值㊂电流传感器输出模拟电压值,通过A/D转换变成数字信号,并作为遥测数据发送给地面接收站,使科研人员能够实时获取航天器各监测点的电流值,有助于掌握卫星的运行状况,当某部分㊀㊀㊀㊀㊀第10期王浩等:微型电流传感器AMR探头芯片研究与测试9㊀㊀设备发生故障时,能对故障进行快速定位,并可以通过发送关断指令,避免故障设备对航天器产生进一步损害㊂例如,电流传感器用于航天器的供配电系统中,就可以掌握航天器的母线电流和各分系统电流㊂磁致电阻效应是一项重要的科学发现,各向异性磁阻(anisotropicmagnetoresistance,AMR)是铁磁材料的电阻率随外界磁场和电流方向夹角改变而改变的现象㊂AMR磁阻效应的磁阻传感器灵敏度高,使用该原理设计的传感器能够在很多领域中使用㊂在铁磁材料中,NiFe㊁Nico合金被大量应用以获得AMR磁阻效应㊂AMR磁阻效应原理制成的传感器目前得到了广泛应用,可以用以制作地球磁场测量㊁车辆监测㊁磁存储器探头㊁接近开关㊁角度传感器㊁电流传感器等㊂而AMR磁阻效应原理制成的电流传感器具有高灵敏度㊁低温漂的性能,较其他电流传感器相比,有其独特的优势㊂1㊀AMR磁阻电流传感器总体方案本文基于零磁通原理来设计电流传感器㊂被检测电流所产生的磁场作用于AMR磁阻芯片,AMR磁阻芯片就会有感应信号输出,该信号经放大,送至功率放大电路,转变为电流值,该电流为补偿电流㊂补偿电流流过补偿线圈,也会产生作用于AMR磁阻芯片的磁场,补偿电流产生磁场和被检测电流产生磁场方向相反,所以AMR磁阻芯片的输出电压会降低㊂当补偿电流产生磁场和被检测电流产生磁场相等时,补偿电流达到稳定值㊂这就是AMR磁阻电流传感器零磁通检测的原理㊂补偿线圈的电流流过采样电阻,输出线性对应的标准电压信号,从而实现了对被检测电流的测量㊂AMR磁阻电流传感器总体方案框图如图1所示㊂图1㊀传感器总体方案设计框图2㊀传感器AMR探头芯片设计2.1㊀AMR探头芯片的Barber电极设计AMR探头芯片是传感器的核心芯片,其将载流带中电流产生的磁场转换为电信号㊂普通的AMR探头由于是由坡莫合金材料制成的AMR电阻,如图2所示,磁场方向与内部电流方向夹角为90ʎ,当磁场与图中反向反转180ʎ时,与内部电流方向的夹角依然为90ʎ,完全不同方向的磁场引起坡莫合金电阻的磁阻变化是相同的,所以普通的AMR探头是不能分辨外加磁场的方向性的㊂图2㊀无Barber电极的磁阻为了满足航天器对传感器线性度和灵敏度的要求,本文选用有Barber电极的磁阻㊂Barber电极通过在坡莫合金材料制作成的电阻中加入铝材料,由于铝材料与坡莫合金的阻抗不同,所以内部电流路径会优先选择阻抗低的铝材料,其电流流向将发生改变,从而使得外部磁场与内部电流方向的夹角产生了变化㊂如图3所示,坡莫合金材料做成的电阻设计为带状结构,Barber电极与电阻的长带状方向成45ʎ角,电源电流流过带状电阻,会优先选择阻抗小的通路,同时用最短路径通过阻抗高的通路,因为内部电流的方向垂直于Barber电极方向,与电阻的长带状方向也成45ʎ角,通过这种设计,图2中同样的磁场方向,与内部电流方向的夹角,从90ʎ变化为45ʎ,而磁场方向发生180ʎ翻转时,其余电阻内部电流方向夹角变化为135ʎ夹角,而磁阻元件输出曲线为余弦函数,两者幅度相等,但正负号相反,从而实现了对方向性的识别㊂图3㊀有Barber电极的磁阻2.2㊀AMR桥式电路将AMR探头芯片设计为一个惠斯登电桥,电桥的4个桥臂电阻均由坡莫合金材料制成,通过几何设㊀㊀㊀㊀㊀10㊀InstrumentTechniqueandSensorOct 2020㊀置方法,设计2个半桥,分别位于沿中心线对称的位置,通过设计每个桥臂电阻的Barber电极,使每个桥臂的方向相反,对应不同的电阻值变化方向(如图4所示),有效提高灵敏度㊂图4㊀桥式电路工作示意图R1 R4是4个桥臂电阻,通过VCC为惠斯登电桥供电,当载流带中有如图4所示方向的被检测电流时,因为Barber电极的设置,外磁场与桥臂电阻中的电流方向夹角存在差异,使得R1㊁R4电阻阻值增大,而R2㊁R3电阻阻值下降(如图4箭头所示方向),桥式电路产生差分电压信号输出,惠斯登电桥的输出电压为VM=VCC㊃(R2R1+R2-R4R3+R4)(1)式中:VM为惠斯登电桥输出电压,V;VCC为惠斯登电桥输入电压,V;R1 R4是4个惠斯登电桥桥臂电阻,Ω㊂若4个桥臂的电阻相同,R1=R2=R3=R4=R,代入式(1)可得:VM=VCC㊃(RR+R-RR+R)(2)此时,VM=0,电桥平衡,输出电压为0㊂当载流带中有被检测电流时,R1 R4阻值发生变化,假设4个桥臂电阻性能完全一致,如前面所述,R1㊁R4的阻值增大ΔR,R2㊁R3的阻值下降ΔR,式(2)变为:VM=VCC㊃(R㊃ΔRR+ΔR+R-ΔR-R+ΔRR-ΔR+R+ΔR)=VCC㊃R㊃2ΔR2R(3)式中ΔR为2个桥臂电阻阻值的改变值,Ω㊂在调理电路的作用下,传感器会在补偿电流线圈中形成与被检测电流方向相反的电流信号,其余被检测电流产生的磁场恰好相反,因其补偿线圈封装在芯片内,与各桥臂的距离远远小于载流带与各桥臂的距离,所以用小的电流就能补偿被检测电流产生的磁场,当两者达到平衡,R1 R4回到接近外磁场为0时的阻值,桥式电路的输出接近于0㊂此外,AMR探头芯片设计为惠斯登电桥有较强的抗干扰性能㊂因为载流带为U型结构设计,所以在载流带中流过电流时,R1㊁R2所受到的磁场方向与R3㊁R4的恰好相反,所以惠斯登电桥能够输出差分电压信号㊂AMR探头芯片的尺寸很小,对于外界干扰磁场来说,可近似的看为一点,所以其受到的干扰磁场的方向和大小近似相等,如图5所示㊂图5㊀探头的抗干扰原理假设外界干扰磁场方向如图5所示,同样因为Barber电极的设置,如图5中箭头所示,R1㊁R3阻值升高,R2㊁R4阻值下降,而因为2个桥臂的材料与尺寸具有高度的一致性,2个半桥的变化近似相等,AMR探头芯片的差分输出没有变化㊂通过这种设计,使传感器具有良好的干扰能力㊂2.3㊀AMR探头芯片的偏置磁场因为AMR磁阻芯片的输出与内部磁化方向与电流方向夹角有关,所以,磁阻传感器有2个稳定工作特性曲线㊂因此假如有外加与坡莫合金内部磁化相反的强磁场干扰,薄膜合金工作特性曲线就会跳变,从正极性输出变为负极性输出,即坡莫合金内部被反向磁化㊂为了保证磁阻芯片的输出电压为设计值,所以需要给磁阻元件添加偏置磁场㊂通过在磁阻2个半桥的旁边,添加2个条形的永磁体,如图6所示㊂永磁体A和永磁体B平行方式,且N极与S极方向一致,从而形成相应方向磁力线,给半桥A和半桥B施加恒定的偏置磁场,从而控制惠斯登桥式电路的灵敏度和线性度,并增加了抗干扰能力㊂3㊀探头芯片测试3.1㊀测试平台建立整个测试平台由安捷伦数字电源㊁安捷伦数字万用表㊁精密电流源㊁PC机组成㊂安捷伦数字电源可以㊀㊀㊀㊀㊀第10期王浩等:微型电流传感器AMR探头芯片研究与测试11㊀㊀图6㊀永磁体为芯片提供偏置磁场示意图提供稳定的工作电源;安捷伦的数字表能实现实时采集,并能通过串口与PC机通讯;精密的电流源的电流输出精度控制在选定量程的3‱以内,同样能通过串口与PC机通信;PC机设计单路测试软件一套㊂软件通过串口控制精密电流源输出制定的电流值,并可读取安捷伦数字万用表采集到的电压值,在指定输出的多点电流值,采集相对应的电压值㊂3.2㊀补偿线圈加电流线性测试补偿线圈加电流源测试连接方式如图7所示,电源为AMR芯片的惠斯登电桥供直流电压,精密电流的电流输出回路接芯片的补偿线圈,万用表采集惠斯登电桥的输出电压㊂图7㊀芯片的补偿线圈加电流测试给补偿线圈加正向电流做线性测试,测试电流范围0 20mA,均分11个测试点,分别为0㊁2㊁4㊁6㊁8㊁10㊁12㊁14㊁16㊁18㊁20mA㊂用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,最后通过最小二乘算法,计算本次测量的线性度其结果如表1所示㊂表1中X为输入电流,Y为输出电压㊂表1㊀补偿线圈正向电流线性测试X/mAY/mVXYX2偏差绝对值去零点Y0-0.002000.068521.7293.45840.03131.73143.45713.828160.00283.45965.17831.068360.02995.1886.89155.128640.04916.893108.59185.911000.05528.5931210.279123.3481440.049410.2811411.948167.2721960.024511.951613.603217.6482560.014213.6051815.232274.1763240.079115.2342016.987339.744000.017916.989㊀㊀通过表1的原始数据和中间计算数据,可以求出其线性度为0.47%㊂给补偿线圈加反向电流做线性测试,测试电流范围0 20mA,均分11个测试点,分别为0㊁2㊁4㊁6㊁8㊁10㊁12㊁14㊁16㊁18㊁20mA㊂用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,并对数据进行线性分析,其结果如表2所示㊂表2㊀补偿线圈反向电流线性测试X/mAY/mVXYX2偏差绝对值去零点Y0-0.004000.06612-1.732-3.46440.0326-1.7284-3.459-13.836160.0001-3.4556-5.181-31.086360.0274-5.1778-6.893-55.144640.0449-6.88910-8.597-85.971000.0544-8.59312-10.287-123.4441440.0499-10.28314-11.958-167.4121960.0264-11.95416-13.614-217.8242560.0119-13.6118-15.287-275.1663240.0334-15.28320-16.956-339.124000.0589-16.952㊀㊀通过表2的原始数据和中间计算数据,可以求出其线性度为-0.39%㊂分析结果可以看出,AMR探头芯片可以线性测量补偿电流产生的磁场,无论加正向电流,还是加反向电流,其线性度绝对值均在1%以内㊂3.3㊀载流带加电流线性测试载流带加电流测试连接方式如图8所示,电源为AMR芯片的惠斯登电桥供直流电压,精密电流源的电流输出回路接芯片的的载流带,万用表采集惠斯登电桥的输出电压㊂图8㊀载流带加电流测试给载流带加正向电流做线性测试,测试电流范围0 50A,均分11个测试点,分别为0㊁5㊁10㊁15㊁20㊁25㊁30㊁35㊁40㊁45㊁50A㊂用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,并对数据进行线性分析,其结果如表3所示㊂表3㊀载流带加正向电流线性测试X/AY/mVXYX2偏差绝对值去零点Y00.011000.09965-1.757-8.785250.0534-1.76810-3.521-35.211000.0112-3.53215-5.285-79.2752250.0309-5.29620-7.039-140.784000.0631-7.0525-8.781-219.5256250.0833-8.79230-10.505-315.159000.0855-10.51635-12.211-427.38512250.0697-12.22240-13.887-555.4816000.0239-13.89845-15.541-699.34520250.0438-15.55250-17.158-857.925000.1485-17.169㊀㊀通过表3的原始数据和中间计算数据,可以求出其线性度为-0.87%㊂给载流带加反向电流做线性测试,测试电流范围0 50A,均分11个测试点,分别为0㊁5㊁10㊁15㊁20㊁25㊁30㊁35㊁40㊁45㊁50A㊂用精密电流源加11个点的电流,待电流稳定后,用万用表测量对应的电压值,软件读取电压值,并对数据进行线性分析,其结果如表4所示㊂表4㊀载流带加反向电流线性测试X/AY/mVXYX2偏差绝对值去零点Y00.005000.135951.7648.82250.07151.759103.52335.231000.00713.518155.27179.0652250.04635.266207.005140.14000.08577258.721218.0256250.10718.7163010.418312.549000.109610.4133512.087423.04512250.084012.0824013.726549.0416000.028413.7214515.33689.8520250.062115.3255016.902845.125000.184616.897㊀㊀通过表4的原始数据和中间计算数据,可以求出其线性度为1.09%㊂分析结果可以看出,AMR芯片的载流带加电流测试的线性度,与补偿线圈加电流测试相比,线性度稍差,其线性度绝对值在1%左右,但仍可说明AMR芯片能够线性检测载流带中电流产生的磁场㊂在测试过程中,可以发现,电路板整体发热,载流带在流过电流时,因自身阻抗导致产生热耗,随着电流增大,电路板温度上升较快,芯片因发热导致温漂,所以影响了芯片输出,导致线性度变差㊂3.4㊀磁平衡工作状态测试本课题研究的磁阻电流传感器的AMR探头芯片,工作在闭环状态下,当达到磁平衡时,被检测电流流过载流带产生的磁场,被补偿线圈中的补偿电流产生磁场相抵消,AMR芯片输出接近于0,整个闭环也达到平衡,所以磁平衡的稳定性,是考核AMR芯片的重要性能㊂使用2台高精度电流源,一台给载流带供被检测电流,另一台给补偿线圈供补偿电流,令载流带流过50A被检测电流,调节另一台精密电流源的输出电流大小,AMR芯片的输出电压接近于0,记录芯片的当前输出,并保持2h,并记录2h后的输出电压值,测量结果如下表5所示㊂表5㊀磁平衡稳定性测试数据测试时间测试结果/μV开始02h后5㊀㊀从表中可以看出,保持2h,传感器的输出一直稳定的工作在磁平衡状态下,输出仅仅变化了5μV㊂通过以上测试可以发现,AMR探头芯片的输出与载流带中的电流大小㊁补偿线圈的电流大小均为线性对(下转第62页)图7㊀控制系统人机交互界面知的,因此使用最短的切向路径规划方法来规划运动路径,该方法简单㊁快速㊁易于实现,可以提高机器人搬运作业的工作效率㊂5㊀焊接结果检测本例中支架总成凸焊M12六角螺母选用焊接规范如下:焊接电流为6.5kA㊁焊接时间为180ms㊁焊接压力为3500N㊁预压时间为1s,平均节拍<70s,焊接结果如图8所示,工作人员采取目视检验和非破坏性强度检验两种检验方法对焊接结果进行检验㊂检具进行焊件规格检验,在焊接件的首㊁末件和相隔20件抽检进行非破坏性强度检验,扭力满足焊接要求且无螺母脱落现象㊂图8㊀螺母凸焊结果6㊀结束语为适应生产动态需求,本文以KUKA机器人和位移传感器为核心架构了模块化柔性机器人自动化防错凸焊系统,包含了机器人自动搬运㊁螺母螺栓自动输送㊁自动凸焊㊁防漏防错检测等流程,可根据不同焊件生产需求更换终端夹具和螺母/螺栓输送机,具有广泛的适用性,极大地提高了凸焊过程的安全性㊁灵活性与重构性,极大地提高了生产效率㊂参考文献:[1]㊀周照耀,罗洁汉,邹春华,等.热成形钢/T型镀锌螺母的电容储能凸焊接头组织及性能[J].华南理工大学学报(自然科学版),2018,46(10):81-87.[2]㊀毕运波,李永超,顾金伟,等.机器人自动化制孔系统[J].浙江大学学报(工学版),2014,48(8):1427-1433.[3]㊀权龙哲,申静朝,奚德君,等.狭闭空间内苗盘物流化搬运机器人运动规划与试验[J].农业机械学报,2016,47(1):51-59.[4]㊀丁磊,李恩,谭民,等.五自由度搬运机器人系统设计与运动学分析[J].华中科技大学学报(自然科学版),2015,43(S1):19-22.[5]㊀齐诗萌,闵华松,黄文晖.基于步进电机的机器人夹持器控制系统设计[J].仪表技术与传感器,2018(9):61-65.[6]㊀周继裕,张坤忠,许雪威,等.基于PID算法和STM32的分拣搬运机器人的设计[J].仪表技术与传感器,2017(4):122-126.[7]㊀贺秋伟,王龙山,刘庆民,等.基于计算机视觉的滚珠螺母形位误差检测[J].农业机械学报,2007(8):159-163.作者简介:王睿(1978 ),博士,讲师,主要研究方向为焊接过程信息采集与质量监控等㊂E⁃mail:31938756@qq.com刘锋(1994 ),硕士研究生,主要研究方向为焊接过程信息采集与质量监控㊂E⁃mail:2907507770@qq.com通讯作者:王剑峰(1968 ),硕士,高级工程师,主要研究方向为信息采集与故障诊断㊂E⁃mail:wangjianfeng@jei.com.cn(上接第12页)应关系,可以有效的检测两者产生的磁场,而且补偿线圈中的电流可以有效的补偿载流带中电流产生的磁场,AMR探头芯片满足本课题的需求㊂4㊀结束语本文针对航天器微型电流传感器,对其探头芯片进行了研究,提出了AMR芯片的Barber电极设计,提出了AMR桥式电路,并分析了这种电路设计形式抗干扰的原理,并为探头芯片提供了偏置磁场方案,最后对芯片进行了详细测试,介绍了测试方法㊁测试平台,在补偿线圈和载流带分别加电流进行线性测试,并模拟产品实际工作的磁平衡状态,测试结果,AMR芯片线性度绝对值在1%左右,说明探头芯片设计合理,各方面性能优异,可以很好的用于闭环电流传感器㊂参考文献:[1]㊀刘迎春,叶湘滨.传感器原理设计与应用[M].4版.长沙:国防科技大学出版社,2002,19-38.[2]㊀王立锦.改善AMR薄膜磁电阻传感器线性度的几种方法[J].北京科技大学学报,2006,28(8):744-749.[3]㊀李东昇,程武山.基于TMR磁传感器的电力系统大电流测量[J].传感器与微系统,2013(12):1-2.[4]㊀赵义恒,张药西.软磁材料的技术进展及选择[J].电子元器件应用,2009,11(3):73-76.[5]㊀何俊彦.巨磁阻抗效应在电流传感器中的应用研究[D].成都:电子科技大学,2012:5-15.[6]㊀李伟,杨峰.基于自旋阀巨磁电阻传感器的直流电流测量[M].北京:化学工业出版社,2004:283-298.作者简介:王浩(1995 ),硕士研究生,主要研究方向为智能控制技术,电力电子技术㊂E⁃mail:785535230@qq.com。
一种AMR传感器结构及其制造方法[发明专利]
![一种AMR传感器结构及其制造方法[发明专利]](https://img.taocdn.com/s3/m/84e952f9650e52ea54189894.png)
专利名称:一种AMR传感器结构及其制造方法专利类型:发明专利
发明人:刘明,王志广,胡忠强,周子尧,温涛,苏玮申请号:CN201811594061.X
申请日:20181225
公开号:CN109781149A
公开日:
20190521
专利内容由知识产权出版社提供
摘要:一种AMR传感器结构及其制造方法,一种AMR传感器结构,包括第一导电材料、第二导电材料和磁阻条;包括提供一个Si基底,并对Si基底进行预处理;利用光刻、剥离技术在基底上形成第一预定义图形;利用磁控溅射薄膜生长技术生长磁性长条,在生长磁阻条时外加偏置磁场,引入附加磁各向异性能;利用丙酮超声清洗,去除多余的磁性薄膜;利用光刻、剥离技术在基底上形成第二预定义图形;利用磁控溅射薄膜生长技术生长惠斯通电桥;利用丙酮超声清洗,去除多余的导电金属薄膜。
增大了磁阻条工作面积,避免了巴贝电极边缘电流的影响,降低了加工过程对精度的要求。
申请人:西安交通大学
地址:710049 陕西省西安市碑林区咸宁西路28号
国籍:CN
代理机构:西安通大专利代理有限责任公司
代理人:徐文权
更多信息请下载全文后查看。
AMR传感器开关芯片的时序控制电路架构及控制方法[发明专利]
![AMR传感器开关芯片的时序控制电路架构及控制方法[发明专利]](https://img.taocdn.com/s3/m/213ffb18590216fc700abb68a98271fe910eafb0.png)
专利名称:AMR传感器开关芯片的时序控制电路架构及控制方法
专利类型:发明专利
发明人:肖登艳,陈忠志,彭卓,赵翔
申请号:CN202111424823.3
申请日:20211126
公开号:CN114070273A
公开日:
20220218
专利内容由知识产权出版社提供
摘要:本发明公开了一种AMR传感器开关芯片的时序控制电路架构,快时钟电路的F_CLK输出端接第一组合逻辑运算模块的CLK_1输入端和第二组合逻辑运算模块的CLK输入端,快时钟电路的EN输入端接第一组合逻辑运算模块的EN输出端;慢时钟电路的S_CLK输出端接第一组合逻辑运算模块的CLK_2输入端;第一组合逻辑运算模块的采用信号输出端输出采样信号,EN输出端输出检测使能信号;第二组合逻辑运算模块的比较器使能信号输出端输出比较器使能信号,斩波输出端输出两相斩波信号。
本发明可降低磁阻开关芯片的工作电流,减小工作能耗,不易产生毛刺信号,采用斩波失调消除技术提高检测精度。
申请人:成都芯进电子有限公司
地址:610000 四川省成都市高新区(西区)天辰路88号3号楼2单元401室
国籍:CN
代理机构:成都行之智信知识产权代理有限公司
代理人:王伟
更多信息请下载全文后查看。
各向异性磁阻传感器

物理研究性实验报告各向异性磁阻传感器(AMR)与地磁场测量第一作者:学号:第二作者:学号:2013年5月17日星期五目录一、摘要 (3)二、实验目的 (3)三、实验原理 (3)四、实验仪器介绍 (4)五、实验内容 (6)1、测量前的准备工作 (6)2、磁阻传感器特性测量 (6)a.测量磁阻传感器的磁电转换特性 (6)b.测量磁阻传感器的各向异性特性 (6)3、赫姆霍兹线圈的磁场分布测量 (7)a.赫姆霍兹线圈轴线上的磁场分布测量 (7)b.赫姆霍兹线圈空间磁场分布测量 (8)4、地磁场测量 (8)六、原始数据记录和处理 (9)(1)、原始数据记录及初步处理 (9)1)AMR磁电转换特性的测量 (9)2)ARM方向特性的测量 (9)3)赫姆霍兹线圈轴向磁场分布测量 (9)4)赫姆霍兹线圈空间磁场分布测量 (10)5)地磁场的测量 (10)(2)、数据处理 (10)1)AMR磁电转换特性的测量 (10)2)ARM方向特性的测量 (11)3)赫姆霍兹线圈轴向磁场分布测量 (11)4)赫姆霍兹线圈空间磁场分布测量 (11)5)地磁场的测量 (12)七、误差分析与思考题 (12)1、误差分析 (12)2、推导公式(1) (13)3、通过网上或图书馆查阅文献,列举某个AMR传感器在有关领域的应用实例,简要介绍其测量原理和方法 (13)八、讨论 (14)1实验中发现的问题 (14)2 对实验仪器的一个小改进 (14)九、总结与收获 (14)十、附录(原始数据) (15)一、摘要物质在磁场中电阻率发生变化的现象称为磁阻效应,磁阻传感器利用磁阻效应制成。
磁场的测量可利用电磁感应,霍耳效应,磁阻效应等各种效应。
其中磁阻效应法发展最快,测量灵敏度最高。
磁阻传感器可用于直接测量磁场或磁场变化,如弱磁场测量,地磁场测量,各种导航系统中的罗盘,计算机中的磁盘驱动器,各种磁卡机等等。
也可通过磁场变化测量其它物理量,如利用磁阻效应已制成各种位移、角度、转速传感器,各种接近开关,隔离开关,广泛用于汽车,家电及各类需要自动检测与控制的领域。
各向异性磁阻传感器的应用

传感器原理
当外部磁场加到这样的铁磁性薄膜上的时 候,磁畴旋转,改变空间取向,这样使得 薄膜条带构成的线阵的表观电阻发生改变。 具体的说,电桥的相对的两个臂上的电阻 增大,而另外两只相对的臂上的电阻减小, 就反应在电桥电压输出的改变上。
各向异性磁阻传感器HMC1002
实验中采用HoneyWell公司的HMC1002 特性: *响应时间短(可以测高频交变磁场) *测量精度高 (达10^(-8)T) *有两个敏感轴,可确定平面内大小方向
具体工作
* 实际工作中采用MFC编程实现图形显示和数据存 储。
* 由于我们采用的是数值计算,因此找到速度快, 精度高的算法是关键因素。在实现实验数据拟合 时,为避免出现高阶的剧烈震荡,我们用了三次 样条的插值算法。由于没有现成的C代码可用 (网上搜不到),只好找到一个用Pascal写的程 序,逐字逐句地改了过来;为了可以进行任意精度 的计算,我们从STL库里继承了Vector类。重载 了[]运算符,解决了数组大小的动态变化问题。
各向异性磁阻传感器的应用
——从设想到实践
指导教师:刘进老师 合
物理系:刘奇 电子系:虞南方 裴轶
各向异性磁阻传感器(AMR)
原理: *Anisotropic Magnetoresistive Effect——各向
异性磁阻效应
*Unlike the Hall effect,AMR is fundamentally
只好找到一个伪代码描述自己来写。 由于在给定的简化条件下,源形状为过固定端点的简单曲线(不考虑复值情况)。
*Unlike the Hall effect,AMR is fundamentally a quantum-mechanical effect. 比较实测场强值与理论计算值的差别。 * 由于我们采用的是数值计算,因此找到速度快,精度高的算法是关键因素。 给定场的分布,有没有办法将源分布计算 set/reset功能管脚的应用是该磁阻传感器最有特色的地方,有必要做一些更具体的介绍: *响应时间短(可以测高频交变磁场) 所以可以想像,时时对传感器进行复位操作(set/reset)可以使得磁畴总是从一个最初始的状态去感知外部磁场,这在测量不断变化 的磁场的时候可以使得测得数据很准确的反应变化的磁场。 从物理上说,磁畴是具有记忆性的:当先后将两个磁场A,B加到一组磁畴上后,磁畴的排布效果与仅将B磁场加到它上面磁畴的排布效果 不同,即磁畴的排布与它感知的磁场“ ”有关,而不仅仅取决于当前的磁场。 拟合场强分布,得到较光滑的场分布函数 先粗略的看磁场变化趋势,保证不漏掉极值点。 实验部分的几个技术问题: l 改变输出电压信号的极性; 由于在给定的简化条件下,源形状为过固定端点的简单曲线(不考虑复值情况)。 同时,honeywell1022磁阻传感器还内置了两组功能性的铁磁性电阻,外部相应的有两组功能管脚,称作offset管脚和set/reset管脚。 实验中采用HoneyWell公司的HMC1002 将产生脉冲电路与输出带负载部分电路分开考虑 拟合的曲线给出的图形和实际图形的对比 为了消除这种效应,避免瞬时性的大磁场对传感器的不良冲击性影响,honeywell磁阻传感器芯片内置了set/reset功能。 从物理上说,磁畴是具有记忆性的:当先后将两个磁场A,B加到一组磁畴上后,磁畴的排布效果与仅将B磁场加到它上面磁畴的排布效果 不同,即磁畴的排布与它感知的磁场“ ”有关,而不仅仅取决于当前的磁场。 在处理输入问题时,用了北大未名BBS上一位同学为MSflexGrid做的功能扩展头文件,非常方便,在此表示感谢。 *响应时间短(可以测高频交变磁场) l 改变输出电压信号的极性; 用集电极开路非门7406多个门并联驱动负载,以减小输出阻抗,增大带负载能力。 因此,导线形状决定了场强分布。
amr中交付具体职责

amr中交付具体职责AMR(自主导航移动机器人)是一种能够自主感知和移动的机器人系统,它可以在室内或室外环境中执行各种任务。
AMR中有多个模块和组件,每个模块和组件都有其具体的职责,下面将逐一介绍这些职责。
1. 导航模块:AMR的导航模块负责确定机器人在环境中的位置,并规划其移动路径。
导航模块通常包括激光雷达或视觉传感器,用于感知周围环境的障碍物和地标,并根据这些信息生成地图。
基于地图,导航模块可以使用路径规划算法确定机器人的最佳移动路径,并通过控制机器人的驱动系统实现移动。
2. 感知模块:AMR的感知模块负责感知环境中的物体和事件,以帮助机器人做出决策。
感知模块通常包括各种传感器,如摄像头、声音传感器、压力传感器等,用于感知物体的位置、形状、颜色、声音等信息。
感知模块可以提供实时的环境信息,使机器人能够识别目标物体、避开障碍物、响应特定事件等。
3. 控制模块:AMR的控制模块负责控制机器人的运动和行为。
控制模块通常包括算法和逻辑控制器,用于解析感知模块提供的信息,并根据设定的任务要求制定相应的控制策略。
控制模块还负责与导航模块和执行模块进行通信,以实现机器人的自主移动和执行任务。
4. 执行模块:AMR的执行模块负责执行具体的任务。
执行模块通常包括机械臂、夹持器等执行机构,用于操作物体、完成特定动作。
执行模块可以根据控制模块的指令进行精确的动作控制,完成各种任务,如搬运物体、装配零件等。
除了以上主要模块和组件外,AMR还可以根据具体需求添加其他功能模块,如语音交互模块、人脸识别模块等,以增强机器人的智能和适应性。
总结来说,AMR中的各个模块和组件分工明确,各司其职,共同协作完成机器人的导航、感知、控制和执行任务等功能。
通过这些模块和组件的交付具体职责,AMR可以在各种环境中灵活自如地移动,并完成各种任务,为人们的生活和工作提供便利。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AMR传感器是需要磁石配合一起使用,利用特定方向的磁场所带来的阻抗变化实现检测。
AMR: Anisotropic Magneto Resistance
可供选择的各种灵敏度,尺寸的产品类型丰富,可以根据您的需要选择最适合的产品。
∙根据检测磁场方向,可分为两种类型。
水平磁场检测类型 AS-M系列
垂直磁场检测类型 AS-V系列
∙各种封装,采样频率 (低消耗电流,高速采样率,无间断驱动) 可供选择。
∙也有窄灵敏度范围的高精度产品。
即使颠倒磁石的S/N磁极,传感器的输出信号也不会发生变化。
水平磁场检测类型产品具有以下特长。
∙与霍尔IC相比可检测磁场范围大,所以
o磁石和传感器的安装配置更加灵活。
o框体或安装时许容误差范围可以更大。
∙不同于干簧管具有结构部件,所以产品体积更小,更可靠。
垂直磁场检测类型产品可以用于对霍尔IC进行替换。
初期评测的时候可提供样品磁石和评测板。
UP 应用实例
最适合作为移动电子产品的非接触开关。
开闭检测
∙手机,笔记本电脑,数码相机等
∙电冰箱,洗衣机等各种家电产品
∙门窗防盗等安防装置
热水器等的流量检测 (桨叶旋转的检测)
脉冲编码器 (环状磁铁的检测)
脉冲编码器
2个磁性传感器和环状磁铁
2传感器互成45度倾角安装。
磁铁旋转的时候,通过检测两个传感器信号的相位差来判断转速和方向。
UP 工作原理
基本特性
∙AMR元件的材料是由Ni,Fe所组成的强磁性金属。
∙正反侧是呈对称形状的,所以即使磁铁的N极和S极颠倒对输出信号也没有影响。
水平磁场检测类型的工作原理
传感器内部构成图
∙AMR传感器是将AMR元件和将信号转换成数字信号的IC集合成为一体封装的产品。
∙由输入端 (V DD) ,GND端 (V SS) ,输出端 (V OUT) 3端子构成。
∙为了降低消耗电流采用间歇采样电路。
防止间歇电震
∙为防止间歇电震,设有磁滞区域。
(间歇电震: 继电器或开关的触点发生切换的时候,由于非常快速且微小的机械振动会导致发
生电子信号断续,这也是造成电路发生错误的原因之一。
)
∙当传感器接近磁铁时,磁场强度超过M OP时,V OUT从H变为L。
∙当传感器远离磁铁时,磁场强度低于M RP时,V OUT从L变为H。
UP 水平磁场检测类型产品 AS-M系列的特长
与霍尔IC的区别
参照下图可以知道,可以被AMR传感器利用的磁场的范围更大,所以检测范围更大。
∙检测范围更大意味着可以吸收框架的公差和安装时的误差带来的影响。
与霍尔IC磁铁相比,也可以将磁铁设计的更小更薄。
传感器与磁场的关系
与干簧管的区别
水平磁场检测类型AS-M系列与干簧管具有以下特长。
∙体积小,价格低。
∙可低电压驱动。
∙非中空封装,所以耐冲击和掉落,可靠性高。
使用例
UP 垂直磁场检测类型产品 AS-V系列的特长
∙通过变更内部结构,可以检测与霍尔IC相同的磁场方向。
∙适合用于替换霍尔IC。
∙具有两种与业界标准SOT23,SON4相兼容的封装。
传统上一般都采用机械式开关来检测手机和笔记本电脑的开闭状态,最近利用可检测磁铁和其周围磁场的传感器来进行检测的电磁开关正在逐渐扩大其应用范围。
电磁开关与机械式开关不同,由于其传感器不直接接触磁铁,因而没有磨损,可提高产品的可靠性。
同时在设计产品时,电磁开关可被设计为内部安装元件,因此在防水设计方面也具备了优点。
出于以上这些原因,在至今为止使用机械式开关的用途方面也开始出现了使用电磁开关的现象,并且其应用范围正在不断扩大,预计今后电磁开关的需求量将会逐步增加。
株式会社村田制作所实现了最适合检测手机和笔记本电脑、数码照相机等开闭状态的电磁开关产品的商品化。
通过利用村田独家的电路技术,我们开发出了极小尺寸的集成电路,因而应用此集成电路即能够减小产品的尺寸,又能够降低产品的成本。
同时从低灵敏度产品到高灵敏度产品为止,村田拥有众多种类的系列产品,可满足各种各样的技术要求。
另外在封装尺寸方面,村田除了拥有业界标准的SOT23封装和SON4封装的产品之外,还准备了1.0x0.9x0.5mm尺寸的最小型产品,可为各种用途设备的小型化和薄型化做出贡献。
特点
将AMR(Anisotropic Magneto Resistance各向异性磁阻)元件和CMOS集成电路合为一体的传
感器集成电路。
从低灵敏度产品至高灵敏度产品的丰富的产品系列。
(标准灵敏度1.5mT、高灵敏度0.5mT、低灵敏度3.0mT)
除了SOT23封装和SON4封装的产品之外,还拥有1.0x0.9x0.5mm尺寸的最小型产品。
两极检测型
低耗电量(1.6μA/1.8V)
用途
检测手机、笔记本电脑和数码照相机等的开闭状态
检测冰箱和自动洗衣机等各种家电的开闭状态
检测防盗门设备等保安设备的开闭状态
特性图
价格:
35日元/个。