直流电机的电力拖动(3)
电力拖动与控制第2章直流电动机的电力拖动课件
Ra Rc
n
T
2
Ce N CeCT N
人为机械特性曲线如图2-4b所示。当Rc为不同值
时,可得到不同的特性曲线。
1.电枢回路串接电阻的人为机械特性
电枢串接电阻时,人为机械特性的特点:
(1) 理想空载转速n0不变,与电枢回路电阻无关。
(2) 转速降△n(或β)则随Ra+Rc成正比地增大。
Ce N 0.2737
额定电磁转矩TN :
TN 9.55Ce N I N 9.55 0.2737 210N m 549N m
根据理想空载点(n0=804,T=0 )及额定运行点
(nN=750,TN=549 )绘出固有机械特性,如图2-8
中直线1所示。
图 2-8 机械特性曲线图
图 2-9 稳定运行和不稳定运行
一、稳定运行的必要条件
图a中,两条机械特性相交于A点,在A点:TA=TL ,
dn/dt=0,所以系统以nA的转速恒速运行。A点被称
为工作点,也称为平衡状态。
当外界扰动使负载特性由T L 变成T L ’时,由于惯
性,n不能突变,转矩T因U、I a 及E a 均未突变仍为
与固有特性相比,只是Φ 改变,因此机械特性方
程式变成:
UN
Ra
n
T
2
Ce CeCT
电机与电力拖动基础教程第3章(3)
主讲人:包 蕾
宁波工程学院
下 页
第3章 直流电动机的运行与电力拖动
3.1 3.2 3.3 3.4 直流电动机的机械特性 直流电动机的起动 直流电动机的调速 直流电动机的制动
第3章
下 页
本次课程内容和重点
内容: 他励直流电动机制动的基本概念;能耗制动、反接制动、 回馈制动方法、特点和应用。 重点: 各种制动的特性。
如果电动机拖动的是位能性负载,TL方向不变,电动机只能
在第四象限E点,T=TL时,匀速放下重物,在第四象限, |-n|>|-n0|,T与n反向,系统进入回馈制动。
第3章
返 回
上 页
下 页
电压反接制动时的能量关系
★电压反接制动时 U 0, I a 0 UIa 0 说明从电源吸收电能; ★ n 0 Ea 0, I a 0 Ea I a 0 说明电动机从负载吸收机械能使电机处于发电状态,将机 械能转化为电能。 上述两部分能量加在一起消耗在电枢回路的电阻上。
EB IB 2I N Ra RW
F和n为制动瞬间气隙
磁通和电枢转速
EB CeΦn U I a Ra
第3章
返 回 上 页 下 页
(1) 求TL=0.8TN时的Ea →制动瞬间EB
EB U N I a Ra I a 0.8I N EB U N I a Ra 220 0.8 210 0.07 208.24V
电机与拖动 第3章 直流电机的电力拖动
电力拖动系统:通过电动机拖动生产机械 完成一定工艺要求的系统或装置。
图3.1 典型电力拖动系统的组成框图
内容简介
• 电力拖动系统的基本问题,包括:电力拖 动的动力学方程式及相关问题、电力拖动 系统的稳定运行条件; • 各类典型机械的负载转矩特性; • 由他励直流电动机组成电力拖动系统的起、 制动与调速方法及分析。
即:
GD GDM
2
2
G1 D12 G2 D2 2 GL DL 2 2 2 j1 ( j1 j2 ) j2
(3-10)
4)直线运动的质量折算
设质量为ml的重物折算至电机轴上的转动惯量为J’M 按照折算前后储存的动能保持不变的原则,有: 1 1 J M 2 mL vL 2 2 2 2 2 n (GDM ) 将 JM , 代入上式,则有: 4g 60
C、恒功率负载的转矩特性
特点:对于车床等生产机械,在切削加工过程中,粗加工时切削 量大,此时阻转矩较大,电动机多在低速状态下运行;精加工时 切削量小,此时阻转矩也小,电动机多在高速速状态下运行。 这样负载转矩与转速之间成反比关系,其功率基本保持不变。
TL k 1 n
图3.9 恒功率负载的转矩特性
由图3.7可见,位能性恒转矩负载的转矩不随转速方向的改变而 改变。无论电机正、反转,负载转矩始终为单一方向。
电机与拖动第三章
电枢反应对机 械特性的影响
2
例3-1 一台他励直流电动机额定功率PN=96KW,额定电压 UN=440V,额定电流IN=250A,额定转速nN=500r/min,电枢回路总 电阻Ra=0.078Ω,忽略电枢反应的影响,求: (1)理想空载转速n0;
(2)固有机械特性斜率β。 解(1)理想空载转速计算,电动机的
GD2 R TtM 375CeCT 2
——电力拖动系统的机电时间常数,是表征机 械惯性的一个非常重要的物理量
dI a I a IL dt TtM TtM
其中 K I st I L
I a I L Ket / TtM 其解为
I st 为电流的起始值
t / TtM
I a I L (I st I L )e
根据额定容量知道,这台电动机属于中等容量电机,
取
EaN 0.95U N 0.95 220 209 V
8
(2)计算CeΦN (3)计算n0 (4)计算TN
CeN
EaN 209 0.182V / r min 1 nN 1150
UN 220 n0 1208 .8r / min CeN 0.182
TN 9.55CeNIN 9.55 0.182 250 434 .5 N m
于是得到固有机械特性上的两个特殊点:理想空载点 ( 0 ,1208.8 ),额定工作点(434.5 ,1150 )。即可画 出这台直流电动机的固有机械特性。
第8章直流电机的电力拖动03
n n0
b
a
1
O
c d
TL
T
T 始终没有改变方向。
制动运 行状态
2
大连理工大学电气工程系
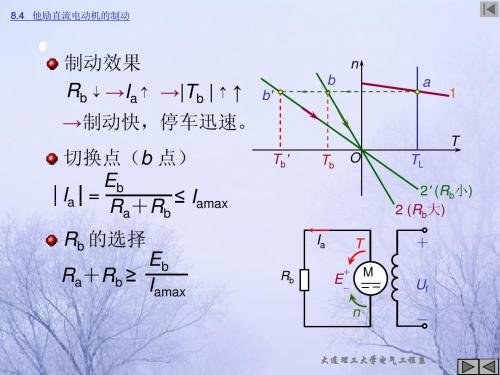
8.4 他励直流电动机的制动
制动效果 Rb →特性 2 斜率 →下放速度 。
n n0
a
b
1
Rb 的选择 (各量取绝对值) Ua+Ed Ra+Rb = Iad Ua+CEΦ nL 稳定运行 d 点 = T / CTΦ 的 E 和 Ia CTΦ = (Ua+CEΦ nL) TL-T0
大连理工大学电气工程系
8.4 他励直流电动机的制动
二、反接制动
1. 电压反向反接制动 —— 迅速停机
Rb + Ia T
E
作用? 限制 Iamax
TL
M
+
Ia 的方向?
- Ia
Ua E
T TL
M
+
Uf
Ua
-
Uf T 的方向? -
n 电动状态
+
n 制动状态
-
电枢反接时: 动能、电源电能均被 Rb 消耗掉。
E →Ia T , T<TL
n = 0,T<TL →反向起动→ n<0 →| n |
大连理工大学电气工程系
→ | E | →Ia →T →T = TL 。
8.4 他励直流电动机的制动
电机拖动第三章

3、单轴电力拖动系统的运动方程式 直线运动: 由物理学知,质量为 的物体作直线运 动时,当加在物体上的拖动力为 ,阻 力为 ,速度为 时,在图所示正方向 下,描述此直线运动的方程式为
单轴电力拖动系统:
与直线运动相对应,转动惯量为 的钢体 做定轴旋转运动时,当加在钢体上的拖动 转矩为 ,阻转矩为 ,角速度为 时,在图所示正方向下,描述旋转运动的 的方程式为
在实际工程计算中,往往不用转动惯量J, 而是用一个叫做飞轮惯量 的参量来 表征旋转系统的惯性作用,用转速n代替 角速度,他们之间的换算关系为:
—旋转体的质量 ;
— 旋转体的惯性半径,
转动惯量
与飞轮惯量
的换算关系为
又因为机械角速度和转速之间有:
最终可以得到:
说明: (1) 是表征整个旋转系统的惯量 的物理量,是一个符号,切不可将它割 裂开而理解为 与 的乘积,通常称 为飞轮惯量或飞轮距。单位为 。
2
当电机工作在A点时,
TemA TLA
则有:
GD2 dn Tem TL 375 dt
考虑到微小增量为在A点的偏 导数乘上 n ,上式为
Tem n
nA
TL n n
nA
GD2 dn n 375 dt
整理为线性微分方程
Tem n TL n
电力拖动系统的机械过度过程
第三章 直流电动机的电力拖动
3.画出分级起动特性图
n
n0
R CeCT 2
Te
Δn
n0
n
Te Ce CT 2
R
KR
28
KRa nhe
Δn
n0
n
Te Ce CT 2
R
KR
K (Ra R1) nhc nhe nec
K (Ra R1 R2 ) nha nhe nec nca
Te
TL
J
d dt
其中,转动惯量 J由下式给出:
J m 2 G D2 GD2
g 4 4g
GD2 为转动部分的飞轮矩( N )m2,由相应手册给出
12
考虑到机械角速度 与转速 之n 间的关系: 2,n于/ 6是0 有:
Te
TL
GD 2 375
dn dt
根据动力学方程式,拖动系统可能出现下列三种情况:
m Rm
Ra
R1 R1 Ra ( 1)Ra
RΩ2 R2 R1 ( 2 )Ra RΩ1
RΩm1
Rm1
Rm2
RΩm2
m
2
RΩ1
RΩm
Rm
Rm1
RΩm1
R m1 Ω1
lg Rm m Ra
lg
31
电机与电力拖动 第3章 直流电机的基本理论讲解
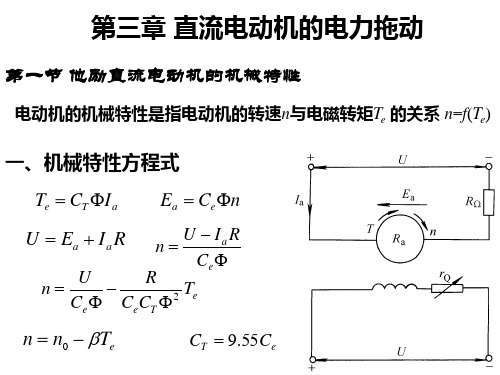
U Ea Ra Ia T CT Ia Ea CEn
n
UN CEΦ
Ra CEΦ
Ia
n0
UN CEΦ
: 空载转速;
T Ra T:转速降;
CE CT Φ 2
n
UN CEΦ
Ra CE CT Φ 2
T
n0
T
n0 n
n U /(CEΦ) : 各种转速的求法: U UN : 理想空载转速; U U N I0Ra 2Ub : 实际空载转速;
(1) 转速特性(电动势公式、电压平衡方程式)
n
f
(Ia )
UN CeN
Ra CeN
Ia
(2) 转矩特性
T f Ia CT Ia
(3) 效率特性
f Ia
P2 P1
100 %
2、串励直流电动机的工作特性 (特点:I=Ia=If;U=Ea+Uf;)
(1) 转速特性
如果电刷上有压降2Ub , 则 电压平衡方程式为:U Ea IaRa 2Ub
T=T0+TL
T: 电磁转矩(拖动转矩);
T0: 电动机空载损耗转矩(制动转矩); TL :电动机输出转矩(制动转矩);
第3章 他励直流电动机的调速(电机及拖动基础)

第三章他励直流电动机电力拖动基础
主要介绍电力拖动系统的运动方程、负载转矩特性、他励直流电动机的机械特性、起动、调速、制动等方法和物理过程。
二、人为特性的求取
在固有机械特性方程的基础上,根据人为特性所对应的参数或或变化,重新计算和,然后得到人为机械特性方程式。
em T n n β−=0S R U Φ0n β
3.3.2 降压起动
当直流电源电压可调时,可采用降压方法起动。
起动时,以较低的电源电压起动电动机,起动电流随电源电压的降低而正比减小。随着电动机转速的上升,反电动势逐渐增大,再逐渐提高电源电压,使起动电流和起动转矩保持在一定的数值上,保证按需要的加速度升速。
降压起动需专用电源,设备投资较大,但它起动平稳,起动过程能量损耗小,因此得到广泛应用。
一、电枢回路串电阻调速
优点:电枢串电阻调速设备简单,操作方便。
2)低速时特性曲线斜率大,静差率大,所以转速的相对稳定性差;
3)轻载时调速范围小,额定负载时调速范围一般为
D≦2;
4)损耗大,效率低,不经济。对恒转矩负载,调速前、
后因增通不变而使T
em 和I
a
不变,输入功率不变,输出
功率却随转速的下降而下降,减少的部分被串联电阻
消耗了。
缺点:1)由于电阻只能分段调节,所以调速的平滑性差;
二、降低电源电压调速
优点:1)电源电压能够平滑调节,可实现无级调速。
2)调速前后的机械特性的斜率不变,硬度较高,负载变化时稳定性好。
3)无论轻载还是负载,调速范围相同,一般可达
D=2.5〜12。
4)电能损耗较小。
缺点:需要一套电压可连续调节的直流电源。
三、减弱磁通调速
第3章直流电动机
U M
T n
TL
F图3-2 单轴电力拖动
2.电力拖动系统的运动方程 系统旋转运动的三种状态
1)当 T = TL 于稳态。
或
dn dt
=
0 时,系统处于静止或恒转速运行状态,即处
2)当 T 3)当 T
> TL
或
dn dt
>
0 时,系统处于加速运行状态,即处于动态。
< TL或
dn < 0 时,系统处于减速运行状态,即处于动态。 dt
矩与转速的乘积为一常数,即TL 与 n 成反比,特性曲线为一条双
曲线。
TL
图3-8 恒功率负载的机械特性
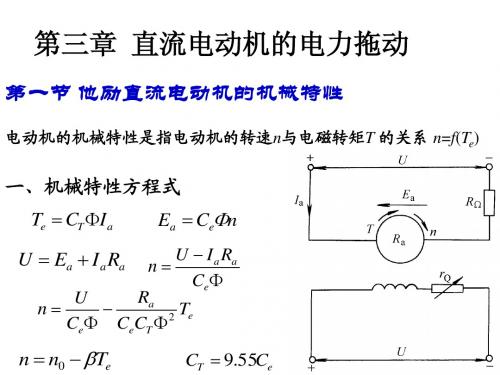
3.3 他励直流电动机的机械特性
直流电动机的机械特性是指电动机的转速n与电磁转矩T之间
的关系:
n= f(T )
3.3.1 机械特性方程
在电枢电路中串入一个附加电阻R,电枢电压为U,磁通为 F,根据电压平衡方程式有:
面向21世纪高职高专系列教材
张 勇 主编
电机拖动与控制
第3章 直流电动机
主讲:李志龙
第3章 直流电动机
在电力拖动系统中,电动机是原动机,起主导作用;生产 机械是负载。电动机的机械特性与负载的机械(转矩)特性 是研究电力拖动的基础。本章主要介绍电力拖动系统的运动 方程、负载转矩特性、直流电动机的机械特性、起动、调速、 制动等方法和物理过程。
《电机原理及拖动(彭鸿才)》习题集-第三章 直流电动机的电力拖动 题及答案

《电拖》直流电力拖动部分
1、电力拖动系统的原动机是___。
a)电动机 b)发电机 c)水轮机 d)汽轮机
2、直流电动机的固有机械特性是一条略向下倾斜的___线。
a)双曲 b) 曲 c)直
3、改变直流电动机电枢回路电阻,可得到一簇___不变、___随电阻增大而增大的人为特性。 a) n 0 b)斜率
4、改变直流电动机端电压,可得到一簇___不变、___随电压下降而减小的人为特性。
a) n 0 b)斜率
5、当改变直流电动机励磁电流时,机械特性的n 0是___的,斜率是___的。
a)不变 b)可变
6、电力拖动系统稳态运行时, T L ___T ,故稳态工作点为负载特性与电动机机械特性的交点。 a)大于 b)小于 c)等于
7、如图电力拖动系统___点是稳定运行点,___点是不稳定运行点。
a)A b)B
8、设T= T L 处,转速为n A ,则当扰动使拖动系统n>n A 时,T 应___ T L.
当扰动使拖动系统n
a)等于 b)大于 c)小于
9、电力拖动系统稳定运行的充要条件是:在T= T L 处,___。 a)L dT dT dn dn = b) L dT dT dn dn < c) L dT dT dn dn
> 10、直流电动机起动时,为了产生尽可能大的起动转矩,应把励磁电流调至 。
a)最大 b)最小
11、直流电动机直接起动电流可以达到额定电流的 倍。
a)4~7 b)10~20
12、当电动机的电磁转矩T 与转速n 同向时,运行在___状态;反向时,运行在___状态。 a)电动 b)制动
13、能耗制动的特点是___;反接制动的特点是___;回馈制动的特点是___。
直流电动机电力拖动
nN
nmin
T TN
•允许最大静差率:
S
max
n0
nmin n0
T TN
• 调速范围和最大允许静差率的关系:
D nmax nmax Smax nmin (1 Smax )nN
•结论:对同一调速系统静差率要求不同,则
所能达到的调速范围也不同 。 Smax D
即,当静差率一定时,若要求扩大调速范
围,则 :<1>
nm受ax限 ;
<2>
必须n设 法减小 。 n
3>电动机负载能力的充分应用: 负载能力:调速运行中在额定电流状态下, 电动机轴上输出转矩与输出功 率大小和变化规律。
• 调压调速: T KT I a KT N I N 常数
P= T n TN n CKn 9550 9550
•与转速成正比,称为恒转矩调速。
2、直流电动机制动的分类:
1>回馈制动 ; 实现:回馈制动的条件:
而: n n。0
Ea ,U因
2>能耗制动 ; 实现:U=0,电枢回路串入电阻。
3>反接制动 ; 实现:电枢电压或电动势极性突然改变 (励磁反向)
•说明:电动机状态。
+
-
U
T
n Ra Ia
+EaM -
If
+
直流电动机的拖动与控制_第三章
KM1
KM2 M KM2 KM1
KM1
此时的机械特性变为: 此时的机械特性变为:
n n0 A
反向
B -TL C O D -n0 F E TL
UN Ra n=− − Tem 2 CeΦ CeCtΦ
3.3.3 回馈制动
降压回馈制动 当电压降低时,工作点由A 当电压降低时,工作点由A 点转移到B 点转移到B点,电枢电流和电 磁转矩相反。 磁转矩相反。电动机处于发电 机状态,转子转速不断降低, 机状态,转子转速不断降低, 到达理想空载转速C点时, 到达理想空载转速C点时,负 载转矩继续使转速下降, 载转矩继续使转速下降,但电 动势低于端电压, 动势低于端电压,电流与电磁 转矩有变正, 转矩有变正,直至稳定工作点 D。若电机在降压回馈制动过 程中维持E U=常数, 程中维持E-U=常数,则可实现 常数 恒电流降压回馈制动。 恒电流降压回馈制动。
n0 − n σ= ×100% n0
N
2. 调速范围 指电动机在额定负载下可能达到的最高转速 nmax和最低转速nmin之比 表达式: 和最低转速nmin之比, nmax和最低转速nmin之比,表达式:
n max D= n min
3.平滑性 3.平滑性 在一定的调速范围内,无级调速的平滑性最好。 在一定的调速范围内,无级调速的平滑性最好。 有级调速的平滑系数是指相邻两级转速之比, 有级调速的平滑系数是指相邻两级转速之比,系数 值越接近1平滑性越好。 值越接近1平滑性越好。
电机与电力拖动基础教程第2章(3)PPT课件
宁波工程学院
2章
返 回 上 页 下7 页
电枢磁通势单独产生的气隙磁通密度(电枢磁密)
根据Bax=μoHax,可推出电枢磁密为:
B ax 0H ax 0F ax 01N D aIx
可见在磁极极靴下,气隙均匀且长度基本不变,则Bax∝x, 磁密分布也是一条直线;在极尖,因气隙长度增加得很快, 磁阻急剧增加,则Bax很小,电枢磁密沿电枢表面分布为一马 鞍波形,如图曲线Bax=ƒ(x)所示。
如果将电枢外表面从几何中心线处展开成直线 如图所示,并设主磁极轴线与电枢表面的交点 处为原点0,这点的电枢磁势为零,设Fax为每 个气隙磁势,在离原点x处作一矩形磁闭合回 路,根据安培环路定律,当磁路不饱和时,有
(H) l2F axN D a I2xA2x
即Fax=Ax,可见Fax与x成正比,则电枢磁势分 布波形是三角波,如图曲线Fax=ƒ(x)所示。
宁波工程学院
2章
返 回 上 页 下8 页
Bax
F ax
问
若电机由于装 配误差或其它 原因,电刷偏 离几何中性线, 电枢磁势特点?
电刷位置一经确定,电枢磁场的空间位置也就固定下来。 当电刷位于几何中性线上时,电枢磁场的轴线就位于几何 中性线上,且与主磁极轴线垂直相交。
宁波工程学院
2章
返 回 上 页 下9 页
返 回 上 页 下10 页
直流电机的电力拖动作业题参考答案(第3章)
作业题参考答案
一.思考题
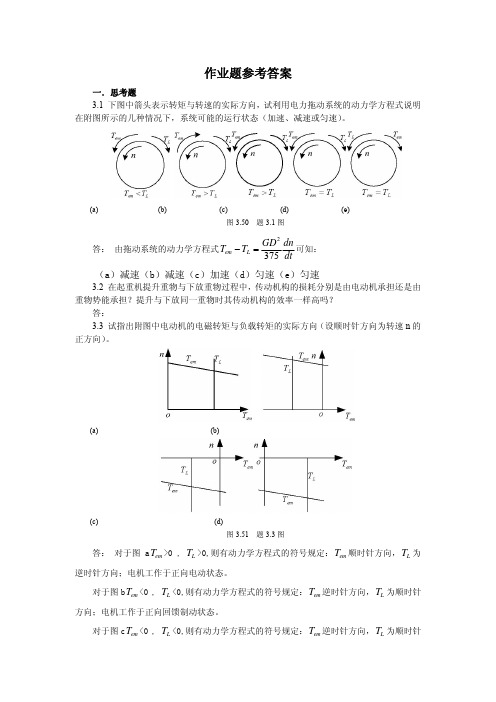
3.1 下图中箭头表示转矩与转速的实际方向,试利用电力拖动系统的动力学方程式说明在附图所示的几种情况下,系统可能的运行状态(加速、减速或匀速)。
(a) (b) (c) (d) (e)
图3.50 题3.1图
答: 由拖动系统的动力学方程式dt dn
GD T T L em 3752=−可知:
(a)减速(b)减速(c)加速(d)匀速(e)匀速
3.2 在起重机提升重物与下放重物过程中,传动机构的损耗分别是由电动机承担还是由重物势能承担?提升与下放同一重物时其传动机构的效率一样高吗?
答:
3.3 试指出附图中电动机的电磁转矩与负载转矩的实际方向(设顺时针方向为转速n 的正方向)。
(a) (b)
(c) (d)
图3.51 题3.3图
答: 对于图a em T >0 , L T >0,则有动力学方程式的符号规定:em T 顺时针方向,L T 为逆时针方向;电机工作于正向电动状态。
对于图b em T <0 , L T <0,则有动力学方程式的符号规定:em T 逆时针方向,L T 为顺时针方向;电机工作于正向回馈制动状态。
对于图c em T <0 , L T <0,则有动力学方程式的符号规定:em T 逆时针方向,L T 为顺时针
方向;电机工作于反向电动状态。
对于图d
em T >0 , L T >0,则有动力学方程式的符号规定:em T 顺时针方向,L T 为逆时针
方向;电机工作于反向回馈制动状态。
3.4 根据电力拖动系统的稳定运行条件,试判断图3.52中A 、B 、C 三点是否为稳定运行点?
电机与电力拖动(第三版)习题参考答案
《电机与电力拖动》(第三版)习题参考答案
第1章思考题和习题
一、填空题
1.直流电动机主磁极的作用是产生,它由和两大部分组成。气隙磁场、主磁极铁心和主磁极绕组
2.直流电动机的电刷装置主要由、、、和等部件组成。
电刷、刷握、刷杆、刷杆架、弹簧、铜辫
3.电枢绕组的作用是产生或流过而产生电磁转矩实现机电能量转换。感应电动势、电枢电流
4.电动机按励磁方式分类,有、、和等。
他励、并励、串励、复励
5.在直流电动机中产生的电枢电动势Ea方向与外加电源电压及电流方向,称为,用来与外加电压相平衡。
相反、反电势
6.直流电动机吸取电能在电动机内部产生的电磁转矩,一小部分用来克服摩擦及铁耗所引起的转矩,主要部分就是轴上的有效转矩,它们之间的平衡关系可用表示。
输出、电磁转矩=损耗转矩+输出转矩
二、判断题(在括号内打“√”或打“×”)
1.直流发电机和直流电动机作用不同,所以其基本结构也不同。(×)
2.直流电动机励磁绕组和电枢绕组中流过的都是直流电流。(×)
3.串励直流电动机和并励直流电动机都具有很大的启动转矩,所以它们具有相似的机械特性曲线。(×)
4.电枢反应不仅使合成磁场发生畸变,还使得合成磁场减小。(√)
5.直流电机的电枢电动势的大小与电机结构、磁场强弱、转速有关。(×)
6.直流电动机的换向是指电枢绕组中电流方向的改变。(√)
三、选择题(将正确答案的序号填入括号内)
1.直流电动机在旋转一周的过程中,某一个绕组元件(线圈)中通过的电流是( B )。
A.直流电流B.交流电流
C.互相抵消,正好为零
2.在并励直流电动机中,为改善电动机换向而装设的换向极,其换向绕组( B )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.3 他励直流电动机的起动
电动机的起动是指电动机接通电源后,由静止状态加速到稳 定运行状态的过程。 起动瞬间,起动转矩和起动电流分别为 Tst CT ΦI st UN I st Ra 起动时由于转速为零,电枢电动势为零,而且电枢电阻很 小,所以起动电流将达很大值。 过大的起动电流将引起电网电压下降、影响电网上其它用户 的正常用电、使电动机的换向恶化;同时过大的冲击转矩会损 坏电枢绕组和传动机构。一般直流电动机不允许直接起动。
Ra UN n Tem 2 C e ΦN C e CT ΦN
由于电枢电阻很小,特性曲线斜率很小,所以固有机械特性 是硬特性。 二、人为机械特性 当改变U或 Ra 或Φ 得到的机械特性称为人为机械特性。
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
1、电枢串电阻时的人为特性
保持 U U N ,Φ ΦN 不变,只在电枢回路中串入电阻 RS 的人为 特性
e
c
Ra Rst 1 R1
n1
TL IL
Ra Rst 1 Rst 2 R2
Ra Rst 1 Rst 2 Rst 3 R3
T1 I1
1
a
T2 I2
Tem I
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
二、分组起动电阻的计算 设对应转速n1、n2、n3时电势分别为Ea1、Ea2、Ea3,则有:
Ra U n Tem 2 C e ΦN C e CT ΦN
n0
n
UN
n01
特点:1)n0随 U 变化, β 不变; 2)U不同,曲线是一组平行线。
U1 U N
U1
Tem
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
3、减弱励磁磁通时的人为特性
保持R Ra ,U U N 不变,只改变励磁回路调节电阻RSf 的人为特性:
起动时,以较低的电源电压起动电动机,起动电流随电源 电压的降低而正比减小。随着电动机转速的上升,反电动势逐 渐增大,再逐渐提高电源电压,使起动电流和起动转矩保持在 一定的数值上,保证按需要的加速度升速。 降压起动需专用电源,设备投资较大,但它起动平稳,起 动过程能量损耗小,因此得到广泛应用。
石家庄铁路职业技术学院信息工程系
b
g Ra
e
c
Ra Rst 1 R1
n1
TL IL
Ra Rst 1 Rst 2 R2
Ra Rst 1 Rst 2 Rst 3 R3
T1 I1
1
a
T2 I2
Tem I
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
设对应转速n1、n2、n3时电势分别为Ea1、Ea2、Ea3,则有: b点 R3 I 2 U N Ea 1 在已知起动电流比β和电枢电 阻前提下,经推导可得各级串联电 阻为:
单元2 直流电动机的电力拖动
本单元主要介绍电力拖动系统的运动方程、负载转矩特性、 直流电动机的机械特性、起动、调速、制动等方法和物理过程。 2.1 电力拖动系统的运动方程和负载转矩特性 2.2 他励直流电动机的机械特性 2.3 他励直流电动机的起动 2.4 他励直流电动机的制动 2.5 他励直流电动机的调速
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.1电力拖动系统的运动方程式和负载转矩特性
2.1.1 电力拖动系统的运动方程式 一、运动方程式 电力拖动系统运动方程式描述了系统的 运动状态,系统的运动状态取决于作用在原 动机转轴上的各种转矩。 根据如图给出的系统(忽略空载转矩), 可写出拖动系统的运动方程式:
B
Tem
即使扰动消失,也不能回到 B 点运行。 0 TL 电力拖动系统稳定运行的充分必要条件是: (1)必要条件:电动机的机械特性与负载的转矩特性必须有交点, 即存在 Tem TL dTem dTL (2)充分条件:在交点处,满足: 。 dn dn 或者说,在交点的转速以上存在Tem TL ,在交点的转速以下存 在 Tem TL
单元2 直流电动机的电力拖动
2.2 他励直流电动机的机械特性
2.2.1 机械特性的表达式 直流电动机的机械特性是指电动机在电枢电压、励磁电流、 电枢回路电阻为恒值的条件下,即电动机处于稳态运行时,电动 n 机的转速与电磁转矩之间的关系: f(Tem ) 由电机的电路原理图可得机械特性的表达式: U R n n Tem 2 n0 C e Φ C e CT Φ n '0 n0 βTem n
单元2 直流电动机的电力拖动
二、恒功率负载特性 恒功率负载特点是:负载转 矩与转速的乘积为一常数,即TL 与 n 成反比,特性曲线为一条双 曲线。
三、泵与风机类负载特性
负载的转矩TL 基本上与转 速 n 的平方成正比。负载特性 为一条抛物线。
n
n
理想的通 风机特性
实际通风 机特性
TL
TL0
TL
石家庄铁路职业技术学院信息工程系
首先确定电动机处于电动状态时的旋转方向为转速的正方 向,然后规定:
(1)电磁转矩Tem 与转速 n 的正方向相同时为正,相反时为负。
(2)负载转矩 TL 与转速 n 的正方向相同时为负,相反时为正。
GD 2 dn (3)惯性转矩 的大小和正负号由Tem 和 TL 的代数和决定。 375 dt
石家庄铁路职业技术学院信息工程系
Rst 1 (β 1 ) Ra Rst 2 (β 1 ) βRa βRst 1 Rst 3 (β 1 ) β 2 Ra βRst 2 Rstm (β 1 ) β m 1 Ra βRstm 1
c点 R2 I1 U N Ea1
d点 R2 I 2 U N Ea 2 e点 R1 I1 U N Ea 2 f点 R1 I 2 U N Ea 3 g点 Ra I1 U N Ea 3
N
n0 称为理想空载转速。
U R 实际空载转速 n0 T0 2 C e Φ C e CT Φ
Tem
T0
TN
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.2.2 固有机械特性和人为机械特性 一、固有机械特性 当 U U N ,Φ ΦN , R Ra 时的机械特性称为固有机械特性:
n
b点 R3 I 2 U N Ea 1
c点 R2 I1 U N Ea1
d点 R2 I 2 U N Ea 2 e点 R1 I1 U N Ea 2 f点 R1 I 2 U N Ea 3 g点 Ra I1 U N Ea 3
nN
Tem I
n3
n0
h
f 3 d 2
为了限制起动电流,他励直流电动机通常采用电枢回路串 电阻或降低电枢电压起动。
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.3.1 电枢回路串电阻起动 一、起动过程 以三级电阻起动时电动机为例
n
S
U
S1 S 2
M
S3
nN
Tem I
n3
n0
h
f 3 d 2
b
g Ra
Ra Rst 1 Rst 2 Rst 3
m
UN I 1 Ra
m 取整数
T1 T (5)计算转矩:T2 ,校验: 2 ( 1.1 ~ 1.3 )TL β
m 如果不满足,应另选T1 或 值并重新计算,直到满足该条件为止.
(6)计算各级起动电阻。
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.3.2
降压起动
当直流电源电压可调时,可采用降压方法起动。
Ra UN n Tem 2 C eΦ C e CT Φ
n02 n
n01
Φ2
Φ1பைடு நூலகம்
Φ2 Φ1 ΦN
n0
n 特点:1)弱磁, 0增大;
β 2)弱磁, 增大
ΦN
Tem
Tk 2 Tk 1 Tk
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.2.3
机械特性求取
二、人为特性的求取 一、固有特性的求取 已知 PN ,U N, I N , nN ,求两点:1)理想空载 ) 点 (Tem 0 , n n0 )和额定运行(Tem TN , n nN 。 在固有机械特性 具体步骤: 方程 n n0 βTem 1 2 U N I N PN 的基础上,根据人为 (1)估算 Ra : Ra ( ~ ) 2 2 3 IN 特性所对应的参数RS U N I N RN 或 或Φ 变化,重新 U (2)计算 C eΦN 和 CT ΦN : C e Φ N nN 计算n0 和 β ,然后得 CT ΦN 9.55CeΦN 到人为机械特性方程 UN 式。 T (3)计算理想空载点: em 0 , n0 C e ΦN
U
M
Tem
Tem TL J
dΩ dt
n
TL
dΩ 其中 J 为系统的惯性转矩。 dt
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
运动方程的实用形式:
GD 2 dn Tem TL 375 dt 系统旋转运动的三种状态 dn 1)当 Tem TL 或 0 时,系统处于静止或恒转速运行状态,即处 dt 于稳态。
单元2 直流电动机的电力拖动
2.4 他励直流电动机的制动
当电磁转矩的方向与转速方向相同时,电机运行于电动机状 态;当电磁转矩方向与转速方向相反时,电机运行于制动状态。 2.4.1 能耗制动 U 电动状态,如图所示。 电动 将开关S投向制动电阻RB上即实现制动. 由于惯性,电枢保持原来方向继续旋 转,电动势E a 方向不变。由Ea 产生的电枢 I a 电流 I aB 的方向与电动状态时的 I a 方向相 TemB 反,对应的电磁转矩 Tem 与 方向相反,为 制动性质,电机处于制动状态。 制动运行时,电机靠生产机械的惯性力的 拖动而发电,将生产机械储存的动能转换成电 能,消耗在电阻上,直到电机停止转动。
n
nA nA nA
A
Tem
0
扰动消失,系统加速,回到 A 点运行。
TL
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
在B点,系统平衡 Tem TL
n 扰动使转速有微小增量,转速由nB n B 上升到n ,em TL,系统加速 。 B T 即使扰动消失,也不能回到 B 点运行。 B n 扰动使转速有微小下降,由 nB下降 n B ,Tem TL ,系统减速。 到 nB
dn 2)当 Tem TL 或 0 时,系统处于加速运行状态,即处于动态。 dt Tem TL 或 dn 0 时,系统处于减速运行状态,即处于动态。 3)当 dt
GD 2 飞轮矩,可以直接查找
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
二、运动方程式中转矩正、负号的规定
单元2 直流电动机的电力拖动
2.1.2
负载的转矩特性
负载的转矩特性,就是负载的机械特性,简称负载特性。 一、恒转矩负载特性 恒转矩负载特性是指生产机械的负载转矩TL 与转速 n 无关 的特性。分反抗性恒转矩负载和位能性恒转矩负载两种。 1.反抗性恒转矩负载 2.位能性恒转矩负载
n
TL
n
TL
石家庄铁路职业技术学院信息工程系
比较以上各式得:
R3 R2 R1 I 1 β R2 R1 Ra I 2
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
计算各级起动电阻的步骤:
(1)估算或查出电枢电阻 Ra ;
(2)根据过载倍数选取最大转矩 T1 对应的最大电流 I 1 ;
(3)选取起动级数 m;
β (4)计算起动电流比:
Ra RS UN n Tem 2 C eΦN C e CT Φ N
n
n0
β 特点:1)n0 不变, 变大;
Ra
Ra RS Tem
石家庄铁路职业技术学院信息工程系
2) β 越大,特性越软。
单元2 直流电动机的电力拖动
2、降低电枢电压时的人为特性 保持 R Ra ,Φ ΦN不变,只改变电枢电压时的人为特性:
T (4)计算额定工作点: N CT ΦN I N , n nN
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.2.4 电力拖动系统稳定运行条件 处于某一转速下运行的电力拖动系统,由于受到某种扰动, 导致系统的转速发生变化而离开原来的平衡状态,如果系统能在 新的条件下达到新的平衡状态,或者当扰动消失后系统回到原来 的转速下继续运行,则系统是稳定的,否则系统是不稳定的。 在A点,系统平衡 Tem TL 扰动使转速有微小增量,转速由n A T 上升到nA ,em TL。 扰动消失,系统减速,回到 A 点运行。 扰动使转速有微小下降,由 n A下降 到 n ,Tem TL 。 A