I O点定义
io点分配方法
io点分配方法【最新版4篇】目录(篇1)1.I/O点的概念与分类2.I/O点分配方法的必要性3.I/O点的分配策略4.I/O点分配方法的实际应用5.结论正文(篇1)1.I/O点的概念与分类I/O点,即输入/输出点,是指计算机系统中用于与外部设备进行数据交互的接口。
根据功能不同,I/O点可分为输入点、输出点和双向点。
输入点用于接收外部设备的数据输入,如键盘、鼠标等;输出点用于将计算机系统的数据输出到外部设备,如显示器、打印机等;双向点则可以同时进行数据输入和输出,如触摸屏。
2.I/O点分配方法的必要性随着计算机技术的发展,外部设备日益增多,对 I/O 点的需求也在不断增长。
如何合理地分配 I/O 点,提高计算机系统的运行效率,成为亟待解决的问题。
因此,研究 I/O 点分配方法具有重要的实际意义。
3.I/O点的分配策略I/O点的分配策略主要分为静态分配和动态分配两类。
(1)静态分配:静态分配是指在系统启动时,一次性地将 I/O 点分配给各个外部设备,并在整个运行过程中保持不变。
静态分配的优点是分配过程简单,易于实现;缺点是分配不够灵活,无法根据系统运行状态进行调整。
(2)动态分配:动态分配是指根据系统运行的需要,实时地分配和回收 I/O 点。
动态分配的优点是充分利用 I/O 资源,提高系统运行效率;缺点是分配过程较为复杂,需要考虑多种因素。
4.I/O点分配方法的实际应用在实际应用中,可根据不同场景选择合适的 I/O 点分配方法。
例如,对于不需要频繁插拔的外部设备,可采用静态分配方法;对于需要频繁插拔的外部设备,可采用动态分配方法。
此外,还可将两种方法结合使用,充分发挥各自的优点。
5.结论I/O点分配方法对于提高计算机系统运行效率具有重要作用。
目录(篇2)1.IO 点的概念和重要性2.IO 点的分配方法3.IO 点的分配策略4.IO 点的应用实例正文(篇2)IO 点,即输入输出点,是指在计算机系统中,用于实现数据输入和输出的接口。
DCS系统I与O点数计算方法

DCS系统I与O点数计算方法DCS控制系统点数通常由设计院统计提供,DCS系统点数是仪表专业I/O点数、电气专业I/O点数和DCS系统与其他系统的通讯点数总和。
准确统计电气和仪表I/O点数可避免电气和仪表专业出现协调不一致的问题,准确的DCS点数能为使用单位决策DCS系统品牌和DCS系统造价提供依据。
DCS系统通常涉及热工检测、模拟量控制、顺序控制和逻辑控制等自动化控制内容,DCS系统点数是从AI模拟输入点数、AO模拟输出点数、DI开关量输入点数、DO开关量输出点数和DCS与其他系统通讯点数五个方面统计结果得出,下面介绍仪表专业和电气专业DCS系统点数计算方法:1、AI输入点数如何计算?AI指进入DCS系统或PLC的模拟量输入信号。
从现场可以直接输入DCS系统的AI输入信号有热电偶(J、K、T、N、E、R、S和B分度号热电偶)、热电阻信号(Cu50、Cu100、Pt100和Pt50分度号)、标准电流信号(4-20mA、0-20mA)、标准电压信号(1-5V、0-5V和0-10V)和脉冲信号;其他形式的信号如需送入DCS系统,则要用信号隔离器、电流变送器、电压变送器等信号转换设备将该信号转换为4-20mA或1-5V 在送入DCS系统。
①热电偶AI输入点数统计单支装配式热电偶或者单支铠装热电偶按1个AI点计算;双支装配式热电偶或者双支铠装热电偶需要在DCS系统显示同一测点的两个传感器温度按2个AI点计算,只显示该测点的一个温度按1个AI点计算;单支多点热电偶或多点热电偶常用于监测同一测点不同部位温度,热电偶有几个测量点则计算几个点热电偶AI输入。
②热电阻AI输入点数统计热电阻AI输入点数统计方法和热电偶AI输入点数统计方法相同。
③标准电流、电压AI输入点统计每一路送入DCS系统的4-20mA、0-2mA、0-5V、1-5V或0-10V信号分别计算1个AI点,同时统计该输入信号对应的量程范围。
二线制变送器(包括温度变送器、压力变送器、液位变送器、流量变送器等)因涉及DC24V供电,最好单独统计AI点数,方便DCS系统集成接线。
Fanuc机器人IO配置和UIUO配置
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
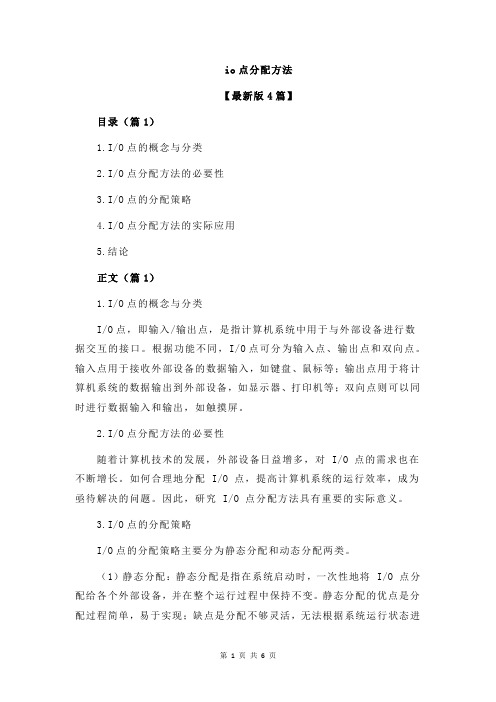
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
FANUC机器人操作入门:难倒大多数人的IO配置怎么搞?(4)

FANUC机器人操作入门:难倒大多数人的IO配置怎么搞?(4)特别说明:要说FANUC和ABB机器人差异性比较大的地方,I/O配置算是其中一个,就算有ABB基础的同学也需要认真学习。
FANUC官方手册虽有说明,但很多人一时半会也理不清。
ABB创建信号,需要先创建板卡,再创建信号。
而FANUC机器人信号都已经创建好了,只需要进行正确分配即可。
关于FANUC机器人信号配置步骤,上节课分享给大家的《FANUC操作手册》(点击了解)有详细的说明,今天分享《R-30iB 控制柜维修说明书》给大家,里面有很多实用说明,可以关注“工业机器人教学”微信公众号,回复“R-30”了解。
说明书领取方法具体步骤1.长按下方二维码识别关注或微信关注公众号 RobotPlayers(工业机器人教学)2.进入公众号,点击左下角的键盘图标,到聊天界面3.就像和朋友聊天一样,输入关键字“R-30”,然后按下发送4.按照提示进行操作,立即获得《R-30iB控制柜维修说明书》!FANUC I/O种类FANUC分有通用I/O和专用I/O,通用IO用户可以自己定义,而专用IO是系统已经确定的IO,用户无法进行定义。
1.通用IO数字I/O:DI[i]/DO[i],个数:512/512群组 I/O:GI[i]/GO[i] ,个数:100/100,范围:0-32767模拟 I/O:AI[i]/AO[i] 个数:64/64,范围:0-16383说明:FANUC通用IO和ABB用途一致,只不过FANUC数字I/O用ON和OFF表示状态变化,ABB用1和0表示状态变化。
2.专用IO外围设备I/O(UOP):UI[i]/UO[i] 个数:18/20操作面板I/O(SOP):SI[i]/SO[i] 个数:15/15机器人 I/O :RI[i]/RO[i] 个数:8/8说明:操作者面板输入/输出SI[ i ] / SO[ i ] 和机器人输入/输出RI[ i ] / RO[ i ] 为硬线连接,不需要配置。
第四讲 I/O原理与应用

PORTD口结构图
另外,PORTD还可以通过对 TRISE寄存器中的D4(PSPMODE)控 制位设定把PORTD口定义成8位字 宽的微处理机端口(或并行从动端口)
PORTE和TRISE寄存器
PORTE口是一个带有斯密特触发缓冲 器的3位双向I/O端口。
TRISE寄存器
(D2~D0)控制PORTE (D2~D0)的方向 (D7~D4)则作为从动并行口的控制位。
对PORTB口进行初始化的程序 例。
CLRF PORTB ;在设置数据方向寄存器之前对
;数据锁存器初始化
BSF STATUS,RP0 ;RP0置l,选中bank 1 MOVLW 0x3C ;00111100是初始化数据 ;方向的值 MOVWF TRISB ;
PORTB引脚的弱上拉电路
每个PORTB引脚都有可控的弱上拉电 路,通过设置OPTION寄存器中的D7(RBPU) 可以控制所有的弱上拉电路。当I/O引脚 被设置输出状态,则其弱上拉电路会自动 切断。当芯片上电复位后,OPTION寄存器 中的D7为1,所有弱上拉电路被切断。若需 要接通弱上拉电路,只要用程序清OPTION 寄存器中的D7为0即可。
电路原理与编程(3)
2)当方向锁存寄存器的Q为“1”时: 则或门输出“1”和与门输出“0”,因此场 效应P和N均截止,管脚的电平不受单片机控 制,而是受到与管脚相连的外部电路控制 此时,管脚此时呈现的输入管脚特性
PORTA的D4引脚
PORTA 作初始化的程序
;通过对输出数据锁存器设 ;置初始化PORTA口 BSF STATUS,RP0 ;RP0置l,选中bank 1, ;以便设置TRISA寄存器 MOVLW 0xCF ;1100111l是初始化数据方向 ;的值 MOVWF TRISA ;RA口D3一D0为输入,D4 ;和D5为输出,D6和D7未 ;用,读出恒为0 CLRF PORTA
PLC -I O点的合理使用
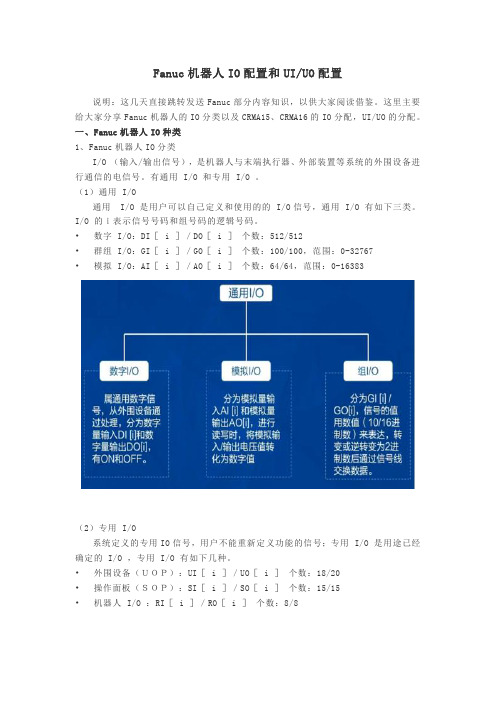
文章编号:1004—289X (2001)05-0024-04可编程控制器I O 点的合理使用首 珩(株洲铁路电机学校,株洲 412001)中图分类号:T P 33 文献标识码:BR eas onable use of a P rogramm able Contro ller I O Po intsSHOU H eng(Zhuzhou R ail w ay E lectric M ach inery Schoo l ,Zhuzhou 412001Ch ina )1 引言输入点和输出点是可编程控制器的一个非常重要的技术参数。
在选购可编程控制器之前,应根据工艺要求设计电气控制原理图,确定输入输出(I O )点数,并留有适当余量。
在现场调试时,往往会遇到输入或输出点数不够而需要扩展。
PL C 的每个输入 输出点数的平均价格一般都在百元以上,增加扩展单元将使成本明显增加,有时也因扩展到了极限值,不允许再增加扩展单元。
如果能在满足工艺要求的前提下,通过改进接线与编程相结合,合理使用I O 点,将使系统的硬件费用降低。
2 输入点的合理使用2.1 用二极管隔离的分组输入一般控制系统都设有“手动”和“自动”两种工作方式,自动程序和手动程序不会同时执行,可以将这两种工作方式分别使用的输入信号分为两组。
见下图接法。
图 1 图 2在公共端和一个输入点X 400接一个选择联动开关,在外部接线上使公共线分成两条COM 1、COM 2,以X 401的输入端为例,按钮SB 1、SB 3虽然都使用了X 401输入端,但实际代表的内部意义不同,在开关打在“手动”时,X 400闭合,COM 1起作用,此时在图2的梯形图中,X 400与X 401串联支路反映SB 1的状态。
当选择开关打在“自动”时,X 400断开,COM 2起作用,程序中单独的X 401反映SB 3的状态,这样一个输入端就可以反映两个输入信号的状态,使PC 的实际输入点得以减少。
IO接线点
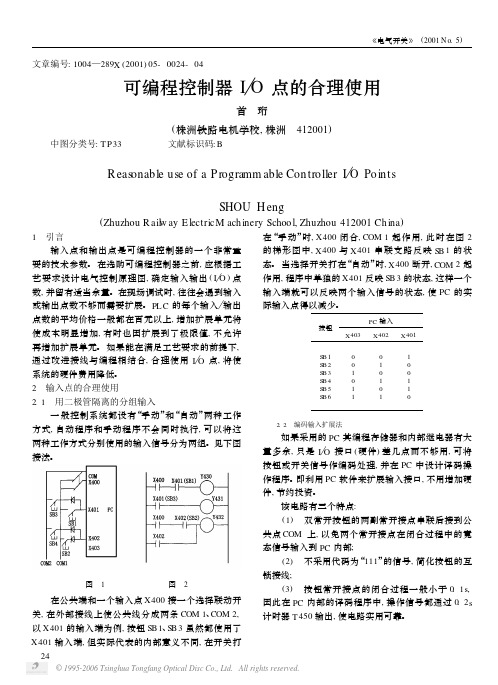
输出序号 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 对应功能 调模前进 调模后退 移模前进 射嘴前进 注射 熔胶 松退 射嘴后退 开模 顶出前进 顶出后退 特快锁模 进芯1 抽芯1 进芯2 抽芯2 氮气充压 氮气放压 吹风2 吹风1 开模背压 备用 备用 备用 自动门开 自动门关 快速开模 全自动 开模终止 安全门关 抽芯3 进芯3 输出序号 对应功能 01 1 02 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 前安全门 后安全门 后安全门 射嘴前限 进芯2限 抽芯2限 备用 射嘴护罩 进芯1限 抽芯1限 电眼确认 储能终止 机手连锁 可以顶出 取出完成 顶出板确 认 调模超载 油泵超载 调模前限 调模后限 调模位移 润滑油位 润滑压力 进芯3限 抽芯3限 滤油器 安全阀 顶出前限 顶出后限 移模重置 顶出重置 注射重置 输出序号 143 148 147 72 72 144 145 146 330 331 332 333 334 335 336 337 72 对应功能 油泵电机运 油泵电机启 油泵电机 AC电源 润滑 报警 辅助电机 射嘴电热 1段电热 2段电热 3段电热 4段电热 5段电热 6段电热 7段电热 AC电源
+12V GND 移模解码 MA MB 器 注射解码 IA IB 器 顶出解码 EA EB 器 电源
0 0 0 501 502 503 504 505
机器人接口定义I O定义

E364 KF1:Linsenkontrolle 2
E365 KF1:Diagnose Code 0
E366 KF1:Diagnose Code 1
E367 KF1:Diagnose Code 2
E368 KF1:Diagnose Code 3
E327 ML:Komunikation bereit
E328 ML:Reserve
E329 ML:Fehlernummer Bit0(Wert1)
E330 ML:Fehlernummer Bit1(Wert2)
E331 ML:Fehlernummer Bit2(Wert4)
E332 ML:Fehlernummer Bit3(Wert8)
E347 ML:Reserve
E348 ML:Reserve
E349 ML:Reserve
E350 ML:Reserve
E351 ML:Reserve
E352 ML:Reserve
E361 KF1:Motor laeuft
E362 KF1:Kappenfraeser Umdrehungen
E670 KL1:Kleberauftrag i.O.
E671 KL1:ParaStrobe
E672 KL1:Kleben bereit
E673 KL1:Automatik-Betrieb
E674 KL1:Pumpe eingeschaltet
E675 KL1:Hydraulik eingeschaltet
E659 KL1:kein Fehler Untere Grenze
控制系统中AI、AO、DI、DO是什么含义

控制系统中AI、AO、DI、DO是什么含义控制系统中AI、AO、DI、DO是什么含义控制系统中AI、AO、DI、DO是集散控制系统中模块上常见的一些基本标注,好处就是便于分清什么类型量的卡件,也好方便后期的维护与保养。
其实就是把现场模拟量仪表和开关量设备等进行清晰分类,便于后期仪表和设备的弱电信号接线。
AI、AO、DI、DO它们都是英文名称的首字母缩写的,A的英文全称Analog(模拟量)、D的英文全称Digital(数字量)、I的英文全称Input(输入)、O的英文全称Output(输出)。
因此,AI表示的是模拟量输入,AO是模拟量输出,DI是数字量输入,DO是数字量输出。
在集散控制系统中的控制柜里就有很多卡件,就会用上述其中类型标清是哪一类卡件。
•AI模拟量输入卡件功能:把被控对象模拟量转换成计算机能识别的数字信号。
被控对象模拟量有:温度、压力、流量、液位、成分。
还有热电偶、热电阻输入卡件。
把这些卡件统称为AI输入模块或AI输入设备。
•AO模拟量输出卡件功能:把计算机的输出数字信号转换成外部过程控制仪表或装置能够接受的模拟量信号。
目的:就是驱动现场各类执行机构的控制。
例如现场的电动调节阀、气动调节阀等的控制。
•DI数字量输入卡件功能:把生产过程中只有两种状态的开关量信号转换成计算机可识别的信号形式。
例如现场的限位开关、继电器、电动机等开关量状态。
•DO数字量输出卡件功能:把计算机输出的二进制代码来表示的开关量信号转换成能对生产过程进行控制或显示状态的开关量信号。
例如现场的指示灯亮/灭、电机的启/停、阀门的开/关、继电器的通/断等开关量的状态控制与状态显示。
集散控制系统是实现对整个生产过程的集中管理和分散控制。
把反映生产过程的变量信号送至控制室,同时把控制变量输送至现场,这样有利于生产过程中的安全生产和经济运行。
零电位点的意义-概念解析以及定义

零电位点的意义-概述说明以及解释1.引言1.1 概述概述零电位点是指溶液中存在的一个特殊点,该点的电位为零。
在化学和生物学领域中,零电位点具有重要的意义。
本文将就零电位点的定义、在化学和生物学中的应用以及其意义进行深入的探讨。
通过对零电位点的研究,我们可以更好地理解电化学现象、生物学环境中的化学反应以及溶液中的离子行为,为相关领域的研究和应用提供理论支持。
同时,本文也将展望零电位点研究的未来发展方向,为读者提供对零电位点意义的更深层次的认识。
文章结构部分内容如下:1.2 文章结构本文将首先介绍零电位点的定义,包括在化学和生物学中的意义。
随后会深入探讨零电位点在化学中的应用,以及在生物学中的重要性。
最后,将对零电位点的意义进行总结,并展望其在未来的应用前景。
通过本文的介绍,读者将对零电位点有一个更深入的了解。
容1.3 目的本文的目的在于探讨零电位点的意义,分析其在化学和生物学领域中的应用和重要性。
通过对零电位点的定义和意义的深入研究,我们可以更好地理解电化学和生物化学中的相关概念,并为相关领域的研究和应用提供理论支持和指导。
同时,也可以为读者提供对零电位点更深入和全面的认识,帮助他们更好地理解和应用这一重要概念。
通过本文的探讨,希望能够引起更多人对零电位点的关注,并为相关领域的发展和应用做出积极的贡献。
2.正文2.1 零电位点的定义零电位点是指在电化学反应中,电极上的溶液中没有电位差的特定点。
在这个点上,溶液中的氧化还原反应达到了平衡,电极的电势保持不变。
同时,在零电位点上,阳极和阴极之间的电势差为零。
在实际的化学反应中,零电位点对于确定氧化还原反应的进行以及分析溶液中的物质起着重要的作用。
对于测定溶液中某种物质的浓度以及确定其氧化还原状态都需要考虑零电位点。
总的来说,零电位点是电化学反应中一个重要的概念,对于化学和生物学领域都有着重要的应用和意义。
接下来我们将详细探讨零电位点在化学和生物学中的应用。
总io点数

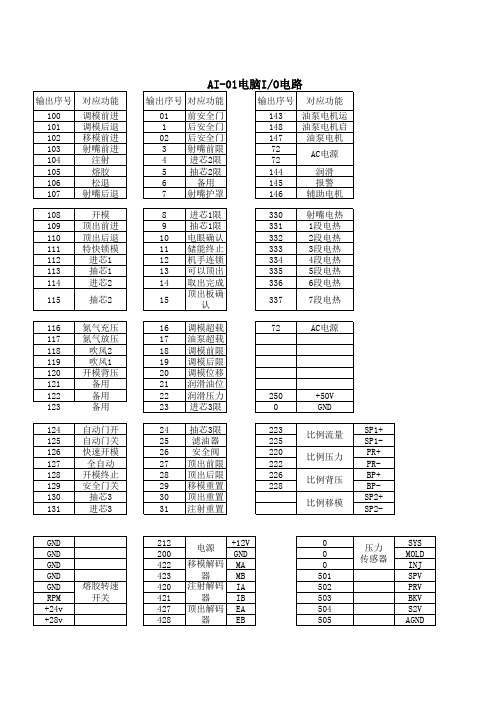
总IO点数
Contents
目录
01. 总IO点数概念
04. 总IO点数管理
02. 总IO点数计算
03. 总IO点数规划
05.
总IO点数技术发展与 趋势
06.
总IO点数的应用场景 与案例分析
Part 点数:输入输出点数的简称,指 一个设备或系统能够处理的输入输 出信号的数量。
01
工业自动化:用于控制和监测生产设备,提高 生产效率和质量
02
智能家居:用于控制家电、照明、安防等设备, 实现家居智能化
03
智能交通:用于监控和管理交通信号、车辆、 行人等,提高交通效率和安全性
04
医疗设备:用于监测和记录患者生理数据,辅 助医生诊断和治疗
05
环境监测:用于监测和记录环境数据,如温度、 湿度、空气质量等,为环保部门提供决策依据
规模和设备数量,计算所 2
需的IO点数
分配IO点数:根据设备
类型和功能,将IO点数
3
分配给各个设备
设计IO点数表:根据分
配结果,设计IO点数表, 4
明确每个IO点的功能和 连接方式
验证IO点数规划:根据
系统需求,验证IO点数
5
规划是否满足系统要求
优化IO点数规划:根据
系统优化需求,对IO点
6
数规划进行优化和调整
02
确定IO点数:根据系统需求,确定所需的 总IO点数
04
验证IO分配方案:通过仿真或实际测试, 验证IO分配方案的可行性和有效性
06
实施IO分配方案:按照优化后的IO分配方 案,实施IO分配,完成系统集成和调试
IO点数规划实例
当代数学对点的定义
在当代数学中,对于点的定义有以下几种方式:
1. 点是最简单的几何图形,是几何图形最基本的组成部分。
在空间中,点作为0维的对象,没有大小和方向。
2. 在欧氏几何中,点被定义为只有位置、没有大小的图形。
它是整个欧氏几何的基础。
3. 在非欧几里得几何中,点可以有大小和方向,例如在球面几何中,北极点就是一个具有大小的点。
4. 在拓扑学中,点通常被视为一个空间中的元素,其周围的空间可以发生改变,但点本身保持不变。
5. 在集合论中,任何集合的元素都可以被称为“点”,但这与三维空间中的点可能没有任何关系。
总的来说,数学中的点是一个抽象的概念,其定义会根据不同的数学分支和理论而有所不同。
数学上点的定义
数学上点的定义
在数学中,点的定义可以从几何和集合论两个角度来看待。
以下是这两个角度的点的定义:
几何角度的点的定义:
点是空间中的位置:从几何的角度,点是空间中的基本概念,用来表示位置而没有大小、形状或其他特性。
点的表示:通常,点用坐标表示,比如在二维平面中可以用(x, y)表示一个点的位置,而在三维空间中可以用(x, y, z)表示。
集合论角度的点的定义:
点是集合中的元素:从集合论的角度,点可以被看作是集合中的一个元素。
在这种定义中,集合是一个无序的容器,而点就是这个容器中的一个成员。
点的抽象概念:这种定义更为抽象,可以应用于各种数学结构中,不仅仅局限于几何空间。
这两种定义方式都是在不同的数学分支中广泛应用的。
在实际应用中,点常常被用来描述对象的位置,建立坐标系,进行几何推理,以及在各种数学分支中构建更为复杂的结构。
需要注意的是,点的定义是数学中的基础概念之一,而数学的不同分支可能会对点有不同的角度和要求。
例如,欧几里得几何中的点是二维或三维空间中的位置,而在拓扑学中,点可以是更一般的拓扑空间中的元素。
FANUC分线盘IO模块详解及针脚地址
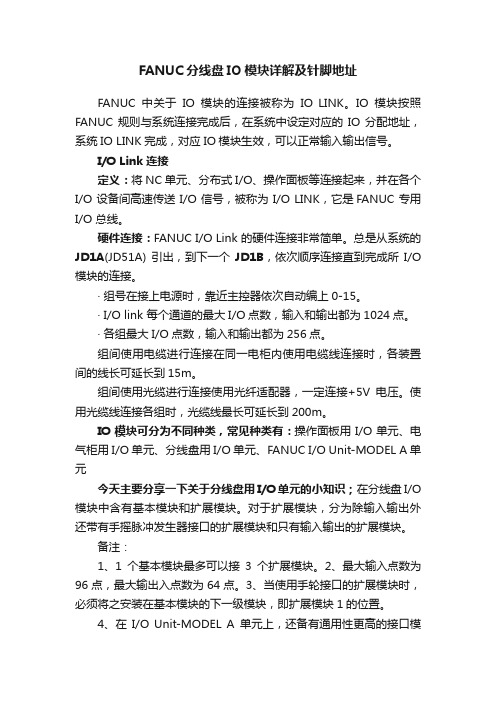
FANUC分线盘IO模块详解及针脚地址FANUC中关于IO模块的连接被称为IO LINK。
IO模块按照FANUC规则与系统连接完成后,在系统中设定对应的IO分配地址,系统IO LINK完成,对应IO模块生效,可以正常输入输出信号。
I/O Link 连接定义:将NC单元、分布式 I/O、操作面板等连接起来,并在各个I/O 设备间高速传送 I/O 信号,被称为 I/O LINK,它是FANUC 专用I/O 总线。
硬件连接:FANUC I/O Link 的硬件连接非常简单。
总是从系统的JD1A(JD51A) 引出,到下一个JD1B,依次顺序连接直到完成所I/O 模块的连接。
· 组号在接上电源时,靠近主控器依次自动编上0-15。
· I/O link 每个通道的最大I/O点数,输入和输出都为1024点。
· 各组最大I/O点数,输入和输出都为256点。
组间使用电缆进行连接在同一电柜内使用电缆线连接时,各装置间的线长可延长到15m。
组间使用光缆进行连接使用光纤适配器,一定连接+5V电压。
使用光缆线连接各组时,光缆线最长可延长到200m。
IO模块可分为不同种类,常见种类有:操作面板用I/O单元、电气柜用I/O单元、分线盘用I/O单元、FANUC I/O Unit-MODEL A单元今天主要分享一下关于分线盘用I/O单元的小知识;在分线盘I/O 模块中含有基本模块和扩展模块。
对于扩展模块,分为除输入输出外还带有手摇脉冲发生器接口的扩展模块和只有输入输出的扩展模块。
备注:1、1个基本模块最多可以接3个扩展模块。
2、最大输入点数为96点,最大输出入点数为64点。
3、当使用手轮接口的扩展模块时,必须将之安装在基本模块的下一级模块,即扩展模块1的位置。
4、在I/O Unit-MODEL A单元上,还备有通用性更高的接口模块。
分线盘式IO单元属于可扩充IO类型,每个IO模块上都有一个50芯接线脚位,名称为CB150,该IO单元接线脚位图如下;IO地址硬件引脚分布图在分线盘IO单元中,每个IO模块对应的分配地址按模块连接顺序依次分配,地址分配有规律,无特殊注意事项。
点的知识点总结
点的知识点总结点是几何中的基本概念之一,是一个没有长度、宽度和厚度的几何元素,仅有位置和方向。
在数学中,点是用来确定直线、平面和立体体的基本概念,在几何学、代数学、拓扑学等数学领域中都有着重要的应用。
本文将从点的定义、性质、应用等方面对点的知识点进行总结。
一、点的定义点是空间中的一个位置,是几何元素中的最基本的元素。
点不占据任何空间,它只有一个位置,没有长度、宽度和厚度。
点用大写字母表示,例如A、B、C等。
二、点的性质1. 点与点之间的距离:在直角坐标系中,两点之间的距离可以用勾股定理来表示。
如果两点A(x1, y1)和B(x2, y2),那么这两点之间的距离d可以表示为:d = √((x2 - x1)² + (y2 -y1)²)。
2. 点的坐标:在二维直角坐标系中,点的坐标可以用有序对(x, y)表示,x代表横坐标,y代表纵坐标,在三维空间中,点的坐标可以用有序三元组(x, y, z)表示。
3. 点的共线性:如果三个或更多的点在同一条直线上,这些点就被称为共线点。
如果三个点A、B、C共线,那么它们满足的条件是AB + BC = AC,其中AB、BC、AC表示两点之间的距离。
4. 点的垂直性和平行性:在平面上,如果两条直线相互垂直,那么它们的斜率之积等于-1;如果两条直线平行,它们的斜率相等。
5. 点的映射:在代数学中,点与点之间的映射关系可以用函数表示。
三、点的应用1. 点在几何中的应用:在几何中,点是构成直线、平面和立体图形的基本元素,点的位置和方向决定了几何图形的性质。
2. 点在计算机图形学中的应用:在计算机图形学中,点是构成图形的基本元素,通过对点的坐标进行计算和变换,可以实现图形的生成和显示。
3. 点在工程中的应用:在工程中,点是对建筑、道路、管道等各种构件的位置进行准确定位的基本元素,点的坐标和位置信息在工程建设中起着关键作用。
4. 点在数学模型中的应用:在数学模型中,点是构成各种数学模型的基本元素,通过对点进行计算和变换,可以得到数学模型的相关结论。