直流电机控制1
专题1 直流有刷电机控制
直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱
齿轮减速箱的作用是,提供较低的转速,较大的力矩。同时,齿轮箱不同的减速比可以提供不 同的转速和力矩。这大大提高了,直流电机在自动化行业中的使用率。
减速电机的特色首要有以下几点: 减速电机节约空间,牢靠经用,能承受一定的过载能力,功率能满意的需求; 减速电机能耗低,性能优越;
伺服电机有直流和交流之分,最早的伺服电 机是一般的直流电机,在控制精度不高的情 况下,才采用一般的直流电机做伺服电机。 当前随着永磁同步电机技术的飞速发展,绝 大部分的伺服电机是指交流永磁同步伺服电 机或者直流无刷电机。
优点:可使控制速度,位置精度非常准确, 效率高,寿命长。
缺点:控制复杂,价格昂贵,需要专业人士 才能控制。
电机控制都是必须有驱动器的。
外部电源
STM32 控制器
脉冲信号
电机引线
电机驱动器
电机
可选部分
位置反馈
负载转速:电机在负载力矩下的转速(单位:rpm或转/分钟或r/min); 负载电流:电机在负载力矩下的电流(单位:mA毫安或A安);
堵转力矩:又叫启动扭力,为电机所能承受的最大扭力标准,超过该扭力,电机将停转或堵 转(单位:g-cm克每厘米或kg-cm公斤每厘米);
堵转电流:也叫启动电流,为电机遭到堵转停止时候的最大电流;(单位:mA毫安或A安);
电磁转矩产生
电枢绕组通过电刷接到直流电源上,绕组的旋转轴与机械负载相联。电流从电刷A流入电枢 绕组,从电刷B流出。电枢电流Ia与磁场相互作用产生电磁力F,其方向可用左手定则判定。 这一对电磁力所形成的电磁转矩T,使电动机电枢逆时针方向旋转。
电磁转矩与电枢旋转方向关系:同向
直流电机的控制原理
直流电机的控制原理
直流电机的控制原理可以通过以下内容来说明:
直流电机的控制原理是通过调节电源电压和改变电枢线圈中电流方向来实现的。
具体来说,直流电机的工作原理是根据洛伦兹力和安培力的作用,通过控制电流方向和大小来改变电机的转速和转向。
在直流电机中,电枢线圈是位于电机中心的旋转部分,而电枢线圈两端与电源相连。
当电流通过电枢线圈时,电流会在磁场中发生作用,产生洛伦兹力,使电枢线圈开始旋转。
电枢线圈的旋转会使其上的集电刷与固定的电极接触,改变电枢线圈中电流的方向,从而反转驱动力,使电机的旋转方向改变。
为了控制直流电机的转速和转向,可以通过改变电源电压和电枢线圈中电流的方向来实现。
当电源电压增加时,电枢线圈中的电流增加,从而增大洛伦兹力,加速电机的转速。
同样地,当电源电压减小时,电机的转速会减慢。
另外,改变电枢线圈中电流的方向也会改变洛伦兹力的方向,从而改变电机的转向。
在实际应用中,直流电机的控制可以通过调节电压或使用电压变频器来实现。
通过调节电源电压的大小,可以实现直流电机的速度调节;通过改变电枢线圈中电流的方向,可以实现直流电机的正反转控制。
综上所述,直流电机的控制原理是通过调节电源电压和改变电
枢线圈中电流方向来实现的,从而实现对电机转速和转向的控制。
直流电机PWM控制

直流电机PWM控制
参照原理图如下所示: 1)查询式键盘原理图
2)6位串行静态显示原理图
直流电机PWM控制
3)直流电机控制原理图
PWM基本原理及其实现措施
• PWM基本原理 • PWM是经过控制固定电压旳直流电源开关频率,
从而变化负载两端旳电压,进而到达控制要求旳 一种电压调整措施。PwM能够应用在许多方面, 如电机调速、温度控制、压力控制等。 • 在PWM驱动控制旳调整系统中,按一种固定旳频 率来接通和断开电源,并根据需要变化一种周期 内“接通”和“断开”时间旳长短。经过变化直 流电机电枢上电压旳“占空比”来变化平均电压 旳大小,从而控制电动机旳转速。所以,PWM又 被称为“开关驱动装置”。
•
* 经过本例程了解PWM 旳基本原理和使用
*
•
*
*
•
* 请将直流电机线接在+5V P12相应旳端子上(步进马达接口出)
*
•
*
*
•
* 请学员仔细消化本例程
*
•
*********************************************************************************/
•
------------1000/(0.02ms*250)=200Hz
•
*************************************/
•
void T1zd(void) interrupt 3 //3 为定时器1旳中断号 1 定时器0旳中断号 0 外
部中断1 2 外部中断2 4 串口中断
•
main()
控制有刷直流电机的方法

控制有刷直流电机的方法
控制有刷直流电机的方法有以下几种:
1. 电压控制方法:通过调节电源电压的大小来控制电机的转速。
增大电源电压可以使电机转速增加,减小电压则使电机转速减小。
2. PWM 控制方法:使用脉宽调制(PWM)技术控制电机的
转速。
通过调节PWM信号的占空比(即高电平时间与周期时
间的比值),可以改变电机的平均电压,从而控制电机的转速。
占空比越大,电机转速越高,反之亦然。
3. 反馈控制方法:使用反馈传感器(如编码器)检测电机的转速或位置,并根据反馈信号进行闭环控制。
通过比较反馈信号与设定值,控制器可以调整电机的电压或PWM占空比,使电
机保持在设定的转速或位置。
4. H桥驱动方法:使用H桥电路控制电机的正反转。
通过控
制H桥的开关状态,可以改变电机的电流流动方向,实现电
机的正反转和制动。
需要注意的是,控制有刷直流电机需考虑到电机的最大电流、功率和电机的特性曲线,选择合适的驱动方式和控制策略,以确保电机的安全运行和性能要求的实现。
4种直流电机控制电路详解,含图
4种直流电机控制电路详解,含图含公式,直观又细致,不懂都难!旺材电机与电控2小时前私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!直流电机在家用电器、电子仪器设备、电子玩具、录相机及各种自动控制中都有广泛的应用。
但对它的使用和控制,很多读者还不熟悉,而且其技术资料亦难于查找。
直流电机控制电路集锦,将使读者“得来全不费功夫”!在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。
大家熟悉的录音机、电唱机、录相机、电子计算机等,都不能缺少直流电机。
所以直流电机的控制是一门很实用的技术。
本文将详细介绍各种直流电机的控制技术。
直流电机,大体上可分为四类:第一类为有几相绕组的步进电机。
这些步进电机,外加适当的序列脉冲,可使主轴转动一个精密的角度(通常在1.8°--7.5°之间)。
只要施加合适的脉冲序列,电机可以按照人们的预定的速度或方向进行连续的转动。
步进电机用微处理器或专用步进电机驱动集成电路,很容易实现控制。
例如常用的S A A l027或S A A l024专用步进电机控制电路。
步进电机广泛用于需要角度转动精确计量的地方。
例如:机器人手臂的运动,高级字轮的字符选择,计算机驱动器的磁头控制,打印机的字头控制等,都要用到步进电机。
第二类为永磁式换流器直流电机,它的设计很简单,但使用极为广泛。
当外加额定直流电压时,转速几乎相等。
这类电机用于录音机、录相机、唱机或激光唱机等固定转速的机器或设备中。
也用于变速范围很宽的驱动装置,例如:小型电钻、模型火车、电子玩具等。
在这些应用中,它借助于电子控制电路的作用,使电机功能大大加强。
第三类是所谓的伺服电机,伺服电机是自动装置中的执行元件,它的最大特点是可控。
在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小,除去控制信号电压后,伺服电机就立即停止转动。
伺服电机应用甚广,几乎所有的自动控制系统中都需要用到。
直流电机 控制方法

直流电机控制方法
直流电机的控制方法主要有以下几种:
1. 速度控制:通过改变电压或电流的大小来控制电机的转速。
可以使用PWM (脉冲宽度调制)技术来实现精确的速度控制。
2. 方向控制:通过改变电机的电流流向来控制电机的旋转方向。
可以使用H桥电路来实现方向控制。
3. 位置控制:通过测量电机转子的位置来控制电机的旋转角度。
可以使用编码器等位置传感器来获取转子位置信息,并使用闭环控制算法来实现精确的位置控制。
4. 力矩控制:通过改变电机的电流大小来控制电机输出的力矩。
可以使用电流反馈控制算法来实现力矩控制。
5. 转矩控制:通过改变电机的电流大小和方向来控制电机输出的转矩。
转矩控制可以实现精确的负载控制和工艺要求。
这些控制方法可以单独应用,也可以组合使用,以实现不同的应用需求。
永磁无刷直流电机直接转矩控制
4、该系统具有很高的成本效益,可以在许多应用领域中进行推广应用。
谢谢观看
二、控制方法的特点和优势
直接转矩控制相较于其他控制方式,具有以下特点和优势:
1、直接扭矩控制:直接转矩控制通过实时计算电机的扭矩和磁链,直接控 制电机的输出扭矩,具有快速的动态响应性能。
2、高鲁棒性:直接转矩控制对电机参数变化具有较强的鲁棒性,可以在电 机参数发生变化时实现较好的控制效果。
3、高效节能:直接转矩控制可以实时调整电机的扭矩输出,使其与实际需 求相匹配,从而达到节能的目的。
结论与展望
本次演示通过对永磁无刷直流电机直接转矩控制系统进行深入研究,得出了 以下结论:
1、直接转矩控制技术可以实现对永磁无刷直流电机的精确控制,具有很快 的动态响应和良好的稳定性。
2、在开关模式选择时,需要考虑电机的电流、电压、转矩等参数,以及系 统的动态响应和稳定性。
3、基于模型的控制系统、PID控制系统、神经网络控制系统等都可以用于直 接转矩控制系统,但需要根据实际情况进行选择和参数整定。
案例二:工业机器人关节驱动
某工业机器人制造商要求设计一个具有高精度、快速响应的关节驱动系统。 通过采用永磁无刷直流电机直接转矩控制方法,实现了对机器人关节位置和速度 的高精度控制。此外,该系统还具有良好的鲁棒性和可靠性,可以在不同环境下 稳定运行。从而提高了机器人的整体性能和生产效率。
结论:
永磁无刷直流电机直接转矩控制是一种先进的电机控制技术,具有许多优点 和实际应用价值。本次演示介绍了该控制方法的基本原理、特点、实现所需硬件 和软件设计,并通过实际案例说明了其在实际应用中的效果。该技术的推广和应 用将有助于提高各种系统的性能、效率和稳定性。
系统设计
1、开关模式选择
直流电动机正反转控制方法

直流电动机正反转控制方法直流电动机正反转控制方法直流电动机是广泛应用于工业和家庭的电动机之一,可以通过调整不同的控制方法,在不同的应用场景中实现不同的控制目的。
其中,正反转控制是直流电动机应用的常规控制之一,本文将介绍几种常见的直流电动机正反转控制方法。
1. 简单交换极性法这种方法是最简单和常见的正反转控制方法之一。
由于直流电机是由磁阻力和电动势两个构成的,当它的电源极性改变时,磁场和电动势也相应地改变,因此电机的旋转方向也会发生变化。
简单来说,通过交换电动机连接的正负极,可以实现直流电动机的正反转控制。
但是,这种方法在实际工作中的应用范围有限,因为在许多场合下,交换电源极性是不现实的。
2. 手动切换反转器法该方法需要一个手动反转器用于可更改电动机的电源极性。
反转器是一个切换装置,中间位置为关闭状态,向左和向右则分别实现正向和反向,根据需要转动反转器来手动改变电源的极性,从而控制电动机的方向。
该方法比较简单且价格便宜,但只适用于需要低频正反转的场合,而且需要人工操作。
3. 电子反转器法电子反转器是一种电子设备,它可以通过更改电动机的电源极性,实现直流电动机正反转控制。
该方法通常采用大小不同的 MOSFET 晶体管,通过激励电路控制 MOSFET 晶体管从而实现电源极性的更改。
这种方法具有操作灵活、反应迅速、稳定性好等优势,并且可以结合其他电子设备进行远程控制和自动化控制。
4. 程序控制反转器法这种方法通常应用于大型机器和复杂生产线。
它通过对反转器的编程控制实现电动机的正反转控制,相比较手动切换反转器法,节省了操作成本和时间,同时,采用程序控制反转器无需人工参与,提高了自动化程度。
但该方法需要专门的软件和控制程序,因此成本较高。
结论控制直流电机正反转的方法有很多种,不同的方法有不同的优缺点。
选择应该根据工作环境、电机负载的大小和形状、控制要求等多个因素进行综合考虑。
需要根据具体情况选择最适用的方法,以满足生产需求。
直流电机控制原理图
直流电机控制原理图
直流电机是一种常见的电动机,它通过直流电源驱动,能够将
电能转换为机械能,广泛应用于工业生产、交通运输、家用电器等
领域。
直流电机的控制原理图是直流电机控制系统的重要组成部分,它能够帮助我们了解直流电机的工作原理和控制方式,本文将介绍
直流电机控制原理图的相关知识。
首先,直流电机控制原理图包括直流电机、电源、控制器等组件。
直流电机通常由定子、转子、碳刷、电枢等部分组成,电源为
直流电源,控制器则是用来控制电机运行的设备。
在直流电机控制
原理图中,这些组件通过电气连线连接在一起,形成一个完整的控
制系统。
在直流电机控制原理图中,电源为直流电源,它可以是电池、
直流发电机、直流稳压电源等。
电源的电压和电流大小将直接影响
到直流电机的运行性能,因此在设计直流电机控制系统时,需要根
据实际需要选择合适的电源。
控制器是直流电机控制系统中的关键部件,它可以根据外部输
入信号控制电机的启停、正反转、速度调节等功能。
常见的直流电
机控制器有直流调速器、直流电机驱动器、直流电机控制板等,它们可以根据具体的控制要求选择使用。
在直流电机控制原理图中,还会包括一些辅助元件,如限流电阻、过载保护器、电流传感器等。
这些辅助元件能够提高电机控制系统的稳定性和安全性,保护电机免受过载、短路等异常情况的影响。
总的来说,直流电机控制原理图是直流电机控制系统的重要组成部分,它通过电气连线将直流电机、电源、控制器等组件连接在一起,形成一个完整的控制系统。
掌握直流电机控制原理图的相关知识,能够帮助我们更好地理解直流电机的工作原理和控制方式,为实际应用提供参考和指导。
电机与电气控制1 直流电机
一般可达D=2.5~12;
(4)电能损耗较小。
降压调速的直流电源:
G—M系统示意图
SCR—M系统示意图
(3)减弱磁通调速 改变磁通只能从额定值往下调,调节磁通 调速即是弱磁调速 。
恒转矩负载时弱磁通 调速过程
减弱磁通调速 Φ 2< Φ 1< Φ N
弱磁调速的优点:
2.固有机械特性和人为机械特性
固有(自然)机械特性:电枢电压、励磁磁通 为额定值,且电枢回路不外串电阻时的机械特性。 机械特性斜率很小, 他励直流电动机的固 有机械特性是硬特性。 通常额定转速降nN只 有额定转速的百分之 几到百分之十几。
(一)他励直流电动机的机械特性
2.固有机械特性和人为机械特性 人为机械特性: ①电枢串电阻时的人为特性
主要起支撑作用。 端盖固定在机座上,其上放置轴承支 撑直流电机的转轴,使直流电机能够 旋转。
二、转子部分
作用:
转子又称电枢,是电机的转动部分, 其作用是感应电势和产生电磁转矩, 从而实现能量的转换
构成:
电枢铁心
换向器 电机转轴
电枢绕组
轴承和风扇
(一)电枢铁心
作用:通过磁通和嵌放 电枢绕组。
材料:为减小磁滞损耗和涡流损耗,电枢铁心 用0.35mm或0.5mm厚的硅钢片叠成,表面有绝 缘层。
限制启动电流的方法:
他励直流电动机: 电枢回路串电阻启动 降低电枢电压启动 启动时应保证电动机 的磁通为最大值,以 使转矩较大
1.电枢回路串电阻启动 启动前,应使励磁回路调节电阻Rst=0,
UN I st R a R st
对于普通直流电动机,一般要求 Ist≤(1.5~2)IN 为了缩短启动时间,保持电动机在启动过程中 的加速不变,应将启动电阻平滑地切除,最后 使电动机转速达到运行值。
直流电机控制器原理图
直流电机控制器原理图直流电机控制器是指控制直流电机运行的设备,其主要作用是根据外部输入信号来控制电机的启动、停止、正反转以及调速等功能。
直流电机控制器原理图是直流电机控制系统的核心部分,通过原理图可以清晰地了解控制器的工作原理和电路结构,有利于工程师们进行系统设计和故障排查。
一般来说,直流电机控制器原理图包括电源模块、控制模块、驱动模块和保护模块等部分。
电源模块主要用于将外部交流电源转换为直流电源,为整个系统提供电能;控制模块则负责接收外部控制信号,并通过逻辑运算和电路控制来实现对电机的启停、正反转和调速等功能;驱动模块则是根据控制模块的输出信号,驱动电机正常运行;保护模块则用于监测电机和系统的工作状态,一旦出现异常情况,及时采取保护措施,避免损坏设备。
在直流电机控制器原理图中,控制模块是最核心的部分,它通常包括信号输入端、逻辑控制电路和输出端。
信号输入端可以接收外部控制信号,比如启停信号、正反转信号、调速信号等,这些信号经过处理后,通过逻辑控制电路的运算,最终输出给驱动模块,实现对电机的控制。
逻辑控制电路通常采用集成电路或者单片机等器件来实现,其结构复杂,但是可以实现多种控制功能,具有很高的灵活性和可靠性。
此外,直流电机控制器原理图中的驱动模块也是非常重要的部分,它的主要作用是根据控制模块的输出信号,驱动电机正常运行。
驱动模块通常采用功率器件和驱动电路来实现,其设计需要考虑到电机的功率大小、负载特性以及工作环境等因素,以确保电机能够稳定、高效地运行。
总的来说,直流电机控制器原理图是直流电机控制系统的核心部分,它的设计和实现直接影响到整个系统的性能和稳定性。
工程师们在进行系统设计和故障排查时,需要充分理解原理图的结构和工作原理,合理选择电路元件和器件,确保系统能够稳定、可靠地运行。
同时,随着科技的发展,直流电机控制器原理图也在不断地更新和优化,以满足不同应用场景的需求,提高系统的性能和可靠性。
直流无刷电机控制器原理

直流无刷电机控制器原理直流无刷电机(BLDC)控制器是一种用于控制无刷电机转速和方向的设备,它通过精确的电子控制来实现对电机的精准驱动。
在本文中,我们将详细介绍直流无刷电机控制器的原理,包括其工作原理、结构组成、控制方法等内容。
1. 直流无刷电机控制器的工作原理。
直流无刷电机控制器的工作原理主要是通过对电机的三相驱动信号进行精确的控制,从而实现对电机的转速和方向的控制。
在控制器内部,通常包含了驱动电路、传感器信号处理电路和控制逻辑电路。
其中,驱动电路用于产生电机的三相驱动信号,传感器信号处理电路用于处理电机位置和速度的反馈信号,控制逻辑电路用于实现对电机的闭环控制。
2. 直流无刷电机控制器的结构组成。
直流无刷电机控制器通常由主控芯片、功率放大器、传感器、电源模块等部分组成。
主控芯片是控制器的核心部分,它负责处理传感器反馈信号并生成电机驱动信号,功率放大器用于放大主控芯片输出的驱动信号,传感器用于检测电机的位置和速度,电源模块用于为整个控制器提供稳定的电源供应。
3. 直流无刷电机控制器的控制方法。
直流无刷电机控制器通常采用开环控制和闭环控制两种方法。
开环控制是指根据预先设定的电机驱动信号直接驱动电机,这种控制方法简单、成本低,但精度较低。
闭环控制是指通过传感器反馈信号对电机进行实时监测和调节,以实现对电机的精准控制,这种控制方法精度高,但成本较高。
4. 直流无刷电机控制器的应用领域。
直流无刷电机控制器广泛应用于工业自动化、电动汽车、无人机、家用电器等领域。
在工业自动化中,直流无刷电机控制器可以实现对生产线上各种设备的精准控制;在电动汽车中,直流无刷电机控制器可以实现对电动汽车驱动系统的精准控制;在无人机中,直流无刷电机控制器可以实现对无人机飞行稳定性的控制;在家用电器中,直流无刷电机控制器可以实现对家用电器的精准驱动。
5. 结语。
通过本文的介绍,相信读者对直流无刷电机控制器的原理有了更深入的了解。
直流电机基本知识与控制方法

专业资料电机简要学习手册2015-2-3一、直流电机原理与控制方法1直流电机简介直流电机(DM)是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
它是能实现直流电能和机械能互相转换的电机。
当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。
直流电机由转子(电枢)、定子(励磁绕组或者永磁体)、换向器、电刷等部分构成,以其良好的调速性能以至于在矢量控制出现以前基本占据了电机控制领域的整座江山。
但随着交流电机控制技术的发展,直流电机的弊端也逐渐显现,在很多领域都逐渐被交流电机所取代。
但如今直流电机仍然占据着不可忽视的地位,广泛用于对调速要求较高的生产机械上,如轧钢机、电力牵引、挖掘机械、纺织机械,龙门刨床等等,所以对直流电机的了解和研究仍然意义重大。
2 直流电动机基本结构与工作原理2.1 直流电机结构如下图,是直流电机结构图,电枢绕组通过换向器流过直流电流与定子绕组磁场发生作用,产生转矩。
定子按照励磁可分为直励,他励,复励。
电枢产生的磁场会叠加在定子磁场上使得气隙主磁通产生一个偏角,称为电枢反应,通常加补偿绕组使磁通畸变得以修正。
2.2 直流电机工作原理如图所示给两个电刷加上直流电源,如上图(a)所示,则有直流电流从电刷A 流入,经过线圈abcd,从电刷B 流出,根据电磁力定律,载流导体ab和cd收到电磁力的作用,其方向可由左手定则判定,两段导体受到的力形成了一个转矩,使得转子逆时针转动。
如果转子转到如上图(b)所示的位置,电刷A 和换向片2接触,电刷B 和换向片1接触,直流电流从电刷A 流入,在线圈中的流动方向是dcba,从电刷B 流出。
此时载流导体ab和cd受到电磁力的作用方向同样可由左手定则判定,它们产生的转矩仍然使得转子逆时针转动。
这就是直流电动机的工作原理。
外加的电源是直流的,但由于电刷和换向片的作用,在线圈中流过的电流是交流的,其产生的转矩的方向却是不变的。
直流电机PWM调速控制系统设计
直流电机PWM调速控制系统设计一、引言直流电机是一种常见的电动机,广泛应用于工业生产中的机械传动系统。
为了实现对直流电机的调速控制,可以采用PWM(脉宽调制)技术。
PWM调速控制系统通过控制脉冲宽度的变化来调整输出信号的平均电压,从而改变电机的转速。
本文将详细介绍直流电机PWM调速控制系统的设计原理、电路设计和控制算法等方面。
二、设计原理1、PWM调制原理PWM调制是一种通过改变脉冲宽度来控制平均电压的技术。
在PWM调速控制系统中,主要是通过改变脉冲的占空比来改变输出信号的平均电压,从而调整电机的转速。
2、直流电机调速原理直流电机的转速与电源电压成正比,转速调节的基本原理是改变电机的供电电压。
在PWM调速控制系统中,通过改变PWM信号的占空比,即每个周期高电平的时间占总周期时间的比例,来改变电机的供电电压,从而控制电机的转速。
三、电路设计1、输入电源电压变换电路为了适应不同的输入电源电压,需要设计输入电源电压变换电路。
该电路的功能是将输入电源电压通过变压器等元件进行变压或变换,使其适应电机的工作电压要求。
2、PWM信号发生电路PWM信号发生电路主要是负责产生PWM信号。
常用的PWM信号发生电路有555定时器电路和单片机控制电路等。
3、驱动电路驱动电路用于控制电机的供电电压。
常见的驱动电路有晶闸管调压电路、MOSFET驱动电路等。
通过改变驱动电路的控制信号,可以改变电机的转速。
四、控制算法在PWM调速控制系统中,需要设计相应的控制算法,来根据系统输入和输出变量进行调速控制。
常见的控制算法有PID控制算法等。
PID控制算法是一种经典的控制算法,通过对系统的误差、误差变化率和误差积分进行综合调节,来控制输出变量。
在PWM调速控制系统中,可以根据电机的转速反馈信号和设定转速信号,计算出误差,并根据PID 控制算法调节PWM信号的占空比,从而实现对电机转速的精确控制。
五、系统实现根据上述设计原理、电路设计和控制算法,可以实现直流电机PWM调速控制系统的设计。
直流电机调速控制系统设计

直流电机调速控制系统设计1.引言直流电机调速控制系统是一种广泛应用于工业生产与生活中的电气控制系统。
通过对直流电机进行调速控制,可以实现对机械设备的精确控制,提高生产效率和能源利用率。
本文将介绍直流电机调速控制系统的设计原理、控制策略以及相关技术。
2.设计原理直流电机调速控制系统的基本原理是通过调整电压或电流来改变电机的转速。
在直流电机中,电压和电流与转速之间存在一定的关系。
通过改变电压或电流的大小,可以实现对电机转速的调节。
为了实现精确的调速控制,通常采用反馈控制的方式,通过测量电机转速,并与设定值进行比较,控制输出电压或电流,以达到期望的转速。
3.控制策略开环控制是指在没有反馈的情况下,直接控制输出电压或电流的大小,来实现对电机转速的调节。
开环控制的优点是简单、成本低,但缺点是无法考虑到外界的扰动和电机的非线性特性,使得控制精度较低。
闭环控制是指在有反馈的情况下,测量电机转速,并与设定值进行比较,控制输出电压或电流。
闭环控制的优点是能够考虑到外界的扰动和电机的非线性特性,提高控制精度。
常用的闭环控制策略有PID控制、模糊控制和神经网络控制等。
其中,PID控制是最为常用的一种控制策略,具有调节速度快、控制精度高的优点。
4.相关技术在直流电机调速控制系统的设计中,还需要用到一些相关的技术,如编码器、传感器和驱动器等。
编码器是一种测量旋转角度和速度的装置,可以用来测量电机的转速。
根据编码器的测量结果,可以对电机进行控制。
传感器可以用来检测电机的电流、电压和转速等参数,以获得电机的实时状态。
通过对这些参数的测量和分析,可以实现对电机转速的控制。
驱动器是将控制信号转换为电机运行的电路,可以根据输入的电压或电流信号控制电机的运行状态。
5.总结直流电机调速控制系统是一种重要的电气控制系统,可以实现对机械设备的精确控制。
在设计过程中,需要合理选择控制策略和相关技术,以实现期望的控制效果。
通过不断的研究和实践,可以进一步提高直流电机调速控制系统的性能和稳定性,满足不同领域的需求。
直流电机 控制原理
直流电机控制原理
直流电机的控制原理是通过改变电机的电流和电压来实现转速和转向的控制。
一般来说,直流电机的转速与电压成正比,而转向则与电流方向相关。
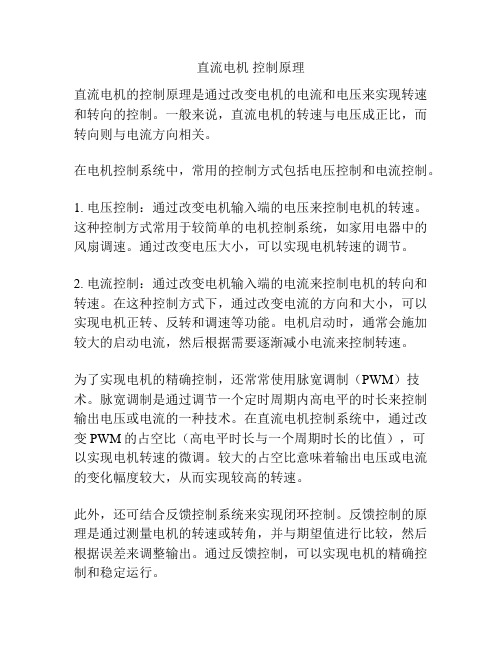
在电机控制系统中,常用的控制方式包括电压控制和电流控制。
1. 电压控制:通过改变电机输入端的电压来控制电机的转速。
这种控制方式常用于较简单的电机控制系统,如家用电器中的风扇调速。
通过改变电压大小,可以实现电机转速的调节。
2. 电流控制:通过改变电机输入端的电流来控制电机的转向和转速。
在这种控制方式下,通过改变电流的方向和大小,可以实现电机正转、反转和调速等功能。
电机启动时,通常会施加较大的启动电流,然后根据需要逐渐减小电流来控制转速。
为了实现电机的精确控制,还常常使用脉宽调制(PWM)技术。
脉宽调制是通过调节一个定时周期内高电平的时长来控制输出电压或电流的一种技术。
在直流电机控制系统中,通过改变PWM的占空比(高电平时长与一个周期时长的比值),可
以实现电机转速的微调。
较大的占空比意味着输出电压或电流的变化幅度较大,从而实现较高的转速。
此外,还可结合反馈控制系统来实现闭环控制。
反馈控制的原理是通过测量电机的转速或转角,并与期望值进行比较,然后根据误差来调整输出。
通过反馈控制,可以实现电机的精确控制和稳定运行。
直流控制器操作方法
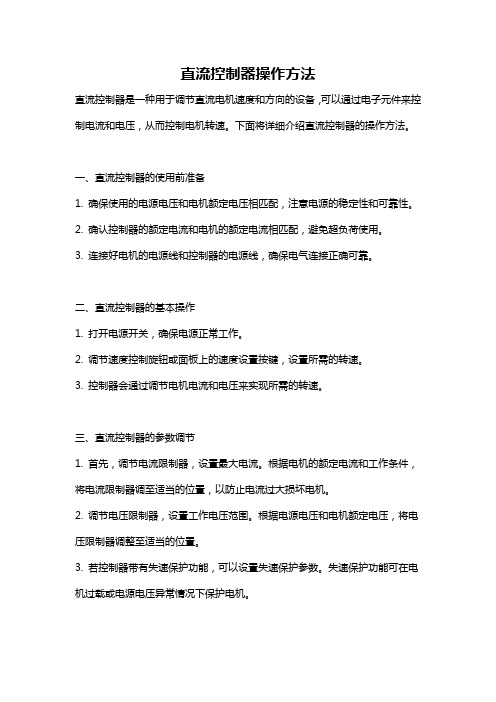
直流控制器操作方法直流控制器是一种用于调节直流电机速度和方向的设备,可以通过电子元件来控制电流和电压,从而控制电机转速。
下面将详细介绍直流控制器的操作方法。
一、直流控制器的使用前准备1. 确保使用的电源电压和电机额定电压相匹配,注意电源的稳定性和可靠性。
2. 确认控制器的额定电流和电机的额定电流相匹配,避免超负荷使用。
3. 连接好电机的电源线和控制器的电源线,确保电气连接正确可靠。
二、直流控制器的基本操作1. 打开电源开关,确保电源正常工作。
2. 调节速度控制旋钮或面板上的速度设置按键,设置所需的转速。
3. 控制器会通过调节电机电流和电压来实现所需的转速。
三、直流控制器的参数调节1. 首先,调节电流限制器,设置最大电流。
根据电机的额定电流和工作条件,将电流限制器调至适当的位置,以防止电流过大损坏电机。
2. 调节电压限制器,设置工作电压范围。
根据电源电压和电机额定电压,将电压限制器调整至适当的位置。
3. 若控制器带有失速保护功能,可以设置失速保护参数。
失速保护功能可在电机过载或电源电压异常情况下保护电机。
四、直流控制器的方向控制1. 大多数直流控制器具有正反转开关,通过该开关可以实现电机正反转。
2. 在调整方向前,应先将电机停止,并等待电机完全停稳后再进行方向切换。
3. 调整方向时,将正反转开关切换至所需方向即可。
五、直流控制器的安全注意事项1. 在操作前,应详细阅读控制器的使用说明书,并按照说明书中的要求进行操作。
2. 注意保持控制器和电机的散热,避免过载使用和长时间连续工作引起过热。
3. 在使用过程中,注意观察电流和电压是否正常,及时排除故障。
4. 严禁擅自改变控制器的参数和结构。
5. 使用过程中需注意保持环境干燥、无腐蚀气体、无大幅度振动和高温等。
总结:直流控制器的操作方法主要包括准备工作、基本操作、参数调节、方向控制和安全注意事项。
操作前需要确认电源电压和电机额定电压匹配,并检查电气连接是否正确可靠。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程单片机原理及应用课程设计题目红外防盗报警器一、设计目的:训练学生综合运用己学课程的基本知识,独立进行单片机应用技术开发工作,掌握单片机程序设计、调试,应用电路设计、分析及调试检测。
二、设计要求:1. 应用MCS-5l单片机设计直流电机控制系统;2. 控制对象:直流电动机电动机功率5W,额定电压24V,控制要求:电动机启动——正转(2min)——停止——反转(2min)——停止;3. 硬件设计根据设计的任务选定合适的单片机,根据控制对象设计接口电路。
设计的单元电路必须有工作原理,器件的作用,分析和计算过程;4. 软件设计根据电路工作过程,画出软件流程图,根据流程图编写相应的程序,进行调试并打印程序清单;5. 原理图设计根据所确定的设计电路,利用Protel等有关工具软件绘制电路原理图、PCB 板图、提供元器件清单。
三、参考资料:[1] 单片微型计算机与接口技术,李群芳、黄建编著,电子工业出版社;[2] 单片机原理及应用,张毅刚编著,高等教育出版社;[3] 51系列单片机及C51程序设计,王建校,杨建国等编著,科学出版社;[4] 单片机原理及接口技术,李朝青编著,北京航空航天大学出版社;完成期限2011.3.14—2011.3.18指导教师专业负责人2011年 3 月13 日第1章概述直流电机就是将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
直流电机的结构应由定子和转子两大部分组成。
直流电机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
为了推广直流电机在化工领域的使用,由于直流电机的功能已得到很大提高,因此更为人性化的设计势必在操作和显示方面。
直流电机直流电动机调速控制一般采用模拟法,对电动机的简单控制应用比较多。
简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。
这类控制容易实现,并可通单片机,直流电机驱动芯片和开关元件来实现,所以本课题采用此法。
同时考虑到以前的直流电机只能通过数码管来进行简单地显示转速,且不能清楚的了解其转向,而 LCD 液晶显示器可以弥补这一点,并且还添加一些更为人性化的提示,这是以前的数码管所不能代替的,这必将是一个新的趋势。
直流电机的主要功能非常广泛,例如:军事和宇航方面的雷达天线,火炮瞄准,惯性导航,卫星姿态,飞船光电池对太阳得跟踪等控制;工业方面的各种加工中心,专用加工设备,数控机床,工业机器人,塑料机械,印刷机械,绕线机,纺织机械,工业缝纫机,泵和压缩机等设备的控制;计算机外围设备和办公设备中的各种磁盘驱动器,各种光盘驱动器,绘图仪,扫描仪,打印机,传真机,复印机等设备的控制;音像设备和家用电器中的录音机,录像机,数码相机,洗衣机,冰箱,电扇等的控制。
第2章直流电机硬件电路设计及描述2.1直流电机的结构直流电机由定子和转子两部分组成。
在定子上装有磁极(电磁式直流电机磁极由绕在定子上的磁绕提供),其转子由硅钢片叠压而成,转子外圆有槽,槽内嵌有电枢绕组,绕组通过换向器和电刷引出。
2.2直流电机的工作原理直流电机电路模型,磁极N、S间装着一个可以转动的铁磁圆柱体,圆柱体的表面上固定着一个线圈。
当线圈中流过电流时,线圈受到电磁力作用,从而产生变,因此通过改变线圈电路的方向实现改变电机的方向。
2.3电磁关系2.4直流电机主要技术参数直流电机的主要额定值有:额定功率Pn:在额定电流和电压下,电机的负载能力。
额定电压Ue:长期运行的最高电压。
额定电流Ie:长期运行的最大电流。
额定转速n:单位时间内的电机转动快慢。
以r/min为单位。
励磁电流If:施加到电极线圈上的电流。
2.5直流电机的类型直流电机可按其结构、工作原理和用途等进行分类,其中根据直流电机的用途可分为以下几种:直流发电机(将机械能转化为直流电能)、直流电动机(将直流电能转化为机械能)、直流测速发电机(将机械信号转换为电信号)、直流伺服电动机(将控制信号转换为机械信号)。
下面以直流电动机作为研究对象。
2.6直流电机的特点通过电刷间的电流与导体电流的性质不同;通过电刷电流为直流电流,导体电流为交变电流;电枢电势与电流反方向,称为反电势。
电磁转矩的方向与电机的转向相同,为驱动转矩。
作为电动机运行:在直流电机的两电刷端上加上直流电压,电枢旋转,拖动生产机械旋转,输出机械能;作为发动机运行:用原动机拖动直流电机的电枢,电刷端引出直流电动势,作为直流电源,输出电能。
第3章软件设计流程3.1程序设计流程图定时中断服务流程图3.2总电路功能介绍直流电机PWM调制控制系统具有加速、减速、正转、反转、停止控制功能。
操作开关通过中断控制直流电机的加速、减速、正转、反转、停止控制功能,并通过LCD液晶显示。
振荡、时钟电路和复位电路由80C51单片机内部给出。
直流电机转动速度由LCD液晶显示。
操作开关状态由液晶显示器显示。
3.3直流电机转速直流电机的数学模型可用下图表示,由图可见电机的电枢电动势Ea的正方向与电枢电流Ia 的方向相反,Ea 为反电动势;电磁转矩T 的正方向与转速n 的方向相同,是拖动转矩;轴上的机械负载转矩T2及空载转矩T0均与n 相反,是制动转矩。
直流电机的数学模型根据基尔霍夫第二定律,得到电枢电压电动势平衡方程式1.1: U=Ea-Ia (Ra+Rc )式1.1中,Ra 为电枢回路电阻,电枢回路串联保绕阻与电刷接触电阻的总和; Rc 是外接在电枢回路中的调节电阻。
由此可得到直流电机的转速公式为: n =Ua-IR/Ce Φ式1.2中,Ce 为电动势常数,Φ是磁通量。
由1.1式和1.2式得 n =Ea/Ce Φ由式1.3中可以看出,对于一个已经制造好的电机,当励磁电压和负载转矩恒定时,它的转速由回在电枢两端的电压Ea 决定,电枢电压越高,电机转速就越快,电枢电压降低到0V 时,电机就停止转动;改变电枢电压的极性,电机就反转。
3.4电机驱动模块的电路设计根据直流电机的工作原理,选取元器件如下,放置元器件、放置电源和地]连线,我们参此设计的直流电机驱动模块电路如图所示● 2SK1058 : CMOSS 管说明:U ………………> 电压 Ea ……… >电枢电动势 n …………………>转速 I ………………>电枢电流 r a ……… >电枢回路电阻 Rc ……… >外在电枢电阻 T1,T2………>负载转矩 T0………… > 空载转矩 Φ………………> 磁通量● 74L26 : 三太门● 1N4006 : 二极管● VSCOURCE : 电源● MOTOR-ENCODER : 直流电机● RES : 电阻● AT89C51 : 单片机 (在此并未显示)直流电机驱动电路然而考虑市场的行情,既然已有专门地为电机驱动而设计的芯片,就没必要再从新来设计;选用L298芯片来构成的电路结构基本上跟上图一样。
所用元器件如下所示:● 1N4006 : 二极管● AT89C51 : 单片机 (在此并未显示)● RES : 电阻● MOTOR-ENCODER : 直流电机● L298 : 电机驱动芯片● RESPACK-8: 排阻3.5显示程序流程图第4章源程序ORG 0000HSJMP DISPLAYORG 0003HLJMP BUTTON ; 外部0中断入口地址ORG 000BHLJMP DINGSHI ; 定时中断T0入口地址RS EQU P3.0RW EQU P3.1E EQU P3.4ORG 0030H ; 此次直流电机的设计以LCD字符夜晶的; 显示程序为主程序DISPLAY:SETB EA ; 打开中断总开关SETB EX0 ; 打开外部中断0开关SETB IT0 ; 打开外部中断0下降沿触发MOV TMOD,#01H ; 设置定时工作方式MOV TL0,#0FFH ; 设置定时初值MOV TH0,#0FFHSETB ET0 ; 打开定时中断T0开关CLR P0.5CLR P0.6CLR P0.7SETB TR0 ; 定时器T0开始定时MOV DPTR,#TAB ; 夜晶显示的字符首地址MOV R0,#00H ; 脉宽的初值MOV R1,#16 ; "SET SPEED PLEASE"的字符个数 MOV R3,#00HMOV R4,#00HLP9:LCALL CHUSHILP2:ACALL BUSYMOV A,#00HMOVC A,@A+DPTRMOV P1,AACALL DATASINC DPTRDJNZ R1,LP2LP3:CJNE R3,#00H,LP4CJNE R4,#00H,LP4SJMP LP3LP4: MOV R7,#00H ; 中断的标志MOV R5,#09H ; CURRENT : 的字符个数ACALL BUSYMOV P1,#0C0HACALL ENABLEMOV DPTR,#MMTABACALL BUSYLP5:MOV A,#00HMOVC A,@A+DPTRMOV P1,AINC DPTRACALL DATASACALL BUSYDJNZ R5,LP5MOV DPTR,#STABMOV A,R2MOV P1,AACALL DATASACALL BUSYMOV A,R3 ; 显示速度的十位MOVC A,@A+DPTRMOV P1,AACALL DATASACALL BUSYMOV A,R4 ; 显示速度的个位MOVC A,@A+DPTRMOV P1,AACALL DATAS; 使夜晶始终显示当前电机的速度 LP8:CJNE R7,#00H,LP7 ; 速度不变时等待LJMP LP8 ; 速度变时重新读入速度LP7:SJMP LP4CHUSHI: ; 使夜晶显示的一些初始设置ACALL BUSYMOV P1,#00000001B ; 清屏并光标复位ACALL ENABLEACALL BUSYMOV P1,#00111000B ; 设置显示模式:8位2行5x7点阵 ACALL ENABLEACALL BUSYMOV P1,#00001111B ; 显示器开、光标开、光标允许闪烁 ACALL ENABLEACALL BUSYMOV P1,#00000110B ; 文字不动,光标自动右移ACALL ENABLEACALL BUSYMOV P1,#80H ; 写入显示起始地址ACALL ENABLERETENABLE: ; 写入控制命令的子程序SETB ECLR RSCLR RWCLR ERETDATAS: ; 写入数据子程序 SETB ESETB RSCLR RWCLR ERETBUSY: ; 准备写入数据 CLR EMOV P1,#0FFHCLR RSSETB RWSETB EJB P1.7,BUSYRETORG 2000HDINGSHI: ; 定时中断服务程序 CPL P0.7JNB P0.7,Z1 ; 周期一定MOV A,#0FFHSUBB A,R0MOV TH0,ASETB TR0RETIZ1: MOV TH0,R0 ; 脉宽SETB TR0RETIBUTTON: ; 从控制键盘中读取操作命令 PUSH ACCCLR EX0CLR EAINC R7 ;MOV A,#0FFHMOV P2,AMOV A,P2JNB ACC.0,AA0JNB ACC.1,KK0JNB ACC.2,ZZJNB ACC.3,FFJNB ACC.4,WW0AJMP QQAA0: CJNE R0,#0FFH, AA1 ; 加速操作AJMP QQAA1: MOV A,R0ADD A,#5MOV R0,AAJMP QQKK0: CJNE R0,#00,MM ; 减速操作AJMP QQMM: MOV A,R0SUBB A,#5MOV R0,AAJMP QQQQ: MOV A,R0MOV B,#5DIV ABMOV B,#10DIV ABMOV R3,AMOV R4,BSETB EX0LCALL DELAYLCALL DELAYLCALL DELAYLCALL DELAYSETB EAPOP ACCRETIZZ: SETB P0.5 ; 正转操作CLR P0.6MOV R2,#2BH ; 正转标志 "+" LCALL DELAYLCALL DELAYLCALL DELAYSETB EX0SETB EAPOP ACCRETIFF: CLR P0.5 ; 反转操作 SETB P0.6MOV R2,#2DH ; 反转标志 "-" LCALL DELAYLCALL DELAYLCALL DELAYSETB EX0SETB EAPOP ACCRETIWW0: CLR P0.5 ; 停止操作CLR P0.6LCALL DELAYLCALL DELAYLCALL DELAYSETB EX0SETB EAPOP ACCRETIDELAY: ; 延时子程序MOV R5,#0E0HMM0: MOV R6,#30HMM1: DJNZ R6,MM1DJNZ R5,MM0RETTAB: DB 53H,45H,54H,20HDB 53H,50H,45H,45H ; "SET SPEED PLEASE" 代码 DB 44H,20H,50H,4CHDB 45H,41H,53H,45HSTAB: DB 30H,31H,32H,33HDB 34H,35H,36H,37H ; "0,1,2,3,4,5,6,7" 代码 DB 38H,39H,41H,42H ; "8,9,A,B,C,D,E,F"DB 43H,44H,45H,46HMMTAB: DB 43H,4FH,52H,52HDB 45H,4EH,54H,20H ; " CURRENT : " 代码DB 3AHEND第5章原理图系统仿真总结这次课程设计是一次非常好的锻炼机会,历时一个星期左右,通过这一个星期的学习,发现了自己的很多不足,自己知识的不怎么牢固,看到了自己的实践经验更是比较缺乏,理论联系实际的能力还急需提高。