51单片机对鞋码匹配仪的设计
基于单片机的鞋底尺寸测量装置的设计

基于单片机的鞋底尺寸测量装置的设计
段晓平
( ) 韶关光栅测量控制技术研究所 , 广东 韶关 5 1 2 0 2 6 摘要 : 为了在制作过程中对鞋底尺寸进行在线检测 , 设计了以单片机为主控制器 , 采用高分辨率的光栅 编 码 器为计量传感器的鞋底尺寸测量装置 。 系统涵盖了嵌入式控制技术 、 微电子技术 、 光栅测量技术 , 大 大 提 高 了测量速度 、 精度和重复性 , 有利于生产部门 , 提高工作效率和节省人力 、 物力资源 。 关键词 : 光栅编码器 ; 单片机 ; 鞋底尺寸在线检测 中图分类号 :TN 7 6 2∶T P 2 7 3 文献标识码 :A
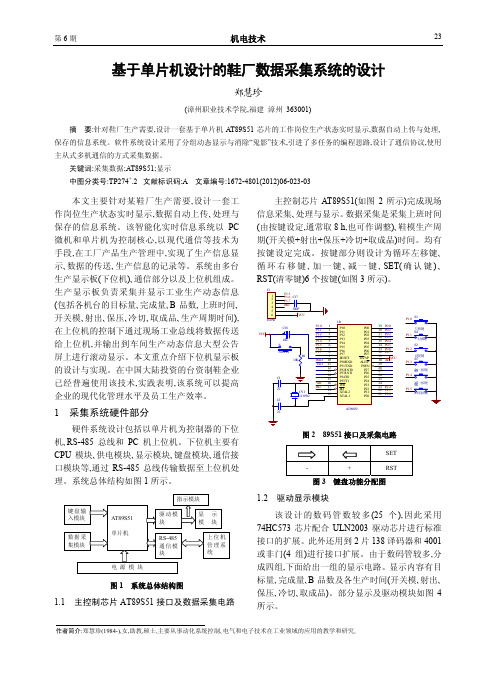
仅是存在9 相 位 差。 编 码 器 的 运 动 方 形完全相 同 , 0 ° 、 : 向分为正 负两个方向 正方向运动时对应的脉冲输出 波形对应图 2 从左向右的波形 ( 其中 , H 代表高电 平 , ; 负方向运动时对应的脉冲输出波形对 L 代表低电平 ) 应图 2 从右向左的波形 。
图 2 编码器输出波形
提高了工作效率 , 降低了成本 。 强度 ,
图 4 测量系统电路方框图
软件编制主要实现如下功能 : 电机驱动 、 红外线遮 挡感知 、 红外感知状态下的光栅编码器输入脉冲计数 、 数据处理显示及筛选控制信号输出 、 数据统计 、 与上位 机通讯 。 图 5 为程序流程图 。 4 结束语 本文设计 的 鞋 底 尺 寸 测 长 装 置 通 过 现 场 实 验 测 能够满足对制作 过 程 中 的 鞋 底 尺 寸 实 现 在 线 测 量 试, 与细分规格的要求 。 该 装 置 具 有 结 构 紧 凑 、 测量精度 高、 自动化程度高 、 操作方便 、 可靠性高 、 维护简单等优 点 。 该装置控制系统运行平稳安全可靠 , 减轻了工作
基于单片机设计的鞋厂数据采集系统的设计
第6期机电技术23基于单片机设计的鞋厂数据采集系统的设计郑慧珍(漳州职业技术学院,福建漳州 363001)摘要:针对鞋厂生产需要,设计一套基于单片机AT89S51芯片的工作岗位生产状态实时显示,数据自动上传与处理、保存的信息系统。
软件系统设计采用了分组动态显示与消除“鬼影”技术,引进了多任务的编程思路,设计了通信协议,使用主从式多机通信的方式采集数据。
关键词:采集数据;AT89S51;显示中图分类号:TP274+.2 文献标识码:A 文章编号:1672-4801(2012)06-023-03本文主要针对某鞋厂生产需要,设计一套工作岗位生产状态实时显示,数据自动上传、处理与保存的信息系统。
该智能化实时信息系统以PC 微机和单片机为控制核心,以现代通信等技术为手段,在工厂产品生产管理中,实现了生产信息显示、数据的传送、生产信息的记录等。
系统由多台生产显示板(下位机)、通信部分以及上位机组成。
生产显示板负责采集并显示工业生产动态信息(包括各机台的目标量、完成量、B品数、上班时间、开关模、射出、保压、冷切、取成品、生产周期时间),在上位机的控制下通过现场工业总线将数据传送给上位机,并输出到车间生产动态信息大型公告屏上进行滚动显示。
本文重点介绍下位机显示板的设计与实现。
在中国大陆投资的台资制鞋企业已经普遍使用该技术,实践表明,该系统可以提高企业的现代化管理水平及员工生产效率。
1 采集系统硬件部分硬件系统设计包括以单片机为控制器的下位机、RS-485总线和PC机上位机。
下位机主要有CPU模块、供电模块、显示模块、键盘模块、通信接口模块等,通过RS-485总线传输数据至上位机处理。
系统总体结构如图1所示。
图1 系统总体结构图1.1 主控制芯片AT89S51接口及数据采集电路主控制芯片AT89S51(如图2所示)完成现场信息采集、处理与显示。
数据采集是采集上班时间(由按键设定,通常取8 h,也可作调整)、鞋模生产周期(开关模+射出+保压+冷切+取成品)时间。
【同学毕业论文】毕业设计---基于51单片机的电子式指南针的设计+最后附源代码
摘要早期的指南针采用了磁化指针和方位盘的组合方式,整个指南针从便携性、指示灵敏度上都有一定缺乏。
本系统采用专用的磁场传感器结合高速微控制器〔MCU〕的电子指南针能有效解决这些问题。
系统采用了磁阻〔GMR〕传感器采集某一方向磁场强度后通过MCU控制器对其进行处理并显示上传,通过对电子指南针硬件电路和软件程序的分析,阐述了电子指南针根本的工作原理及实现。
理论上指南针模块精度到达1°,能够在LCD上显示当前方位并能通过键盘控制上传指南针处理得到的数据到上位机。
关键词:电子指南针,GMR,MCU,LCDABSTRACTSince the early compass was composited by the magnetic compass and direction-pointer, the sensitivity and portability of this compass is ing a dedicated high-speed magnetic sensor with microcontroller (MCU) electronic compass can effectively solve these problems.The system is designed by the reluctance (GMR) sensors collecting a certain direction through the magnetic field strength after the MCU Controller its judgment will be dealt with the results, through the LCD screen display and can be sent to the MCU's top serial Machine. The compass module can reach 1 ° theoretically, in the LCD display on the current position of the keyboard and through selective compass upload the data processing.KEY WORDS:electronic compass,GMR,MCU,LCD目录第1章本研究的背景及目的 (1)1.1 本研究的背景 (1)1.2 本研究的目的 (1)第2章系统的构成及工作原理 (2)2.1 系统的构成 (2)2.2工作原理分析 (2)第3章硬件电路 (4)3.1 单片机系统 (4)3.2 传感器模块 (6)3.2.1 磁阻传感器 (6)3.2.2 磁场测量电路 (7)3.3 LCD显示模块 (8)3.4 实时时钟电路 (9)3.5 接口电路 (10)第4章系统软件 (12)4.1 主监控程序 (12)4.2 实时时钟驱动 (13)4.3 人机界面驱动 (14)4.3.1 液晶模块驱动 (14)4.3.2 键盘驱动 (14)4.4 传感器模块驱动 (14)第5章仿真结果 (17)第6章结论 (18)致谢 (19)参考文献 (20)附录(主要程序) (21)第1章本研究的背景及目的1.1 本研究的背景指南针是用以判别方位的一种简单仪器。
基才51单片机的鞋套机自动测试系统

otie yh esr fh p t i a, n a e n e t nrlinl te nls n de n o e inl ba db e no ei u g l adgt r g nt o c t g a,hna a iad u gmet fh ga n t s ot n s n h i o h mo r o o s ys j t s
Au o a i e tn y t m fs e c v r m a h n a e n 1 mi r c n r le t m tc t s i g s se o ho o e c i e b s d o 5 c o o t o lr
L i UO Je,P in AN La
a t ma i n . u o to s
Ke y wor :e ds mbe di y t m ;s n o ;mi r c nr le d ng s se esr c o o to lr;tsi y t m e tng s se
随 着 S T技 术 在 计 算 机 、 M 网络 通 信 、 费 电子 以 及 汽 车 消
Ab t a t T eman c n e t f h sp p r e in a es se sr cu ei d r m e c mb n t n o e u p rP n s r c : h i o t n i a e sg st t h y tm t t r sma efo t o i a i f h p e C a d ot d h t u h o t
结 果. 试 系统硬 件 部 分 以 5 测 1系列 S C1L 5 0 T 2 C 6 8单 片机 为核 心 , 试 系统 具 有 可 靠 性 高、 作 界 面 友 好 、 测 操 自动 化 程 度
基于51单片机计步器的设计与研究

基于 51单片机计步器的设计与研究摘要:随着经济和科技的可连续发展,人们越来越重视养生与身体健康,经常会进行跑步等锻炼,计步器则是一种可以帮助人们实时掌握自己的运动数据的仪器。
计步器顾名思义就是用来检测步数,通过步数来计算已经行走的里程,来获得运动数据。
本文提出了一个基于加速度传感器的计步器设计,硬件部分由微处理器STC89C51单片机,加速度传感器ADXL345模块,显示模块等几个部分组成,然后通过软件来实现其应有的功能,为现代的智能生活提供更加美好的条件。
关键词:51单片机;计步器;加速度传感器;随着社会经济的不断推进,快节奏的生活使人们开始忽视自己的身体锻炼,不知道如何锻炼自己,因此,本文提出了计步器,该计步器可以随身携带,功能准确,数据稳定,以此满足人们对步数的统计,清楚每天的步数,从而可以有效地挑战自己,锻炼身体,增强体质。
对于计步器的设计,计步器是利用加速度传感器测量人们步行时加速度的变化量,具有稳定、可靠和精确等功能。
往往是从硬件和软件两个方面入手,尤其是按键电路、加速度传感器、数码管显示电路等电路的设计与研究,以此来实现计步的功能。
1计步器的基本组成与应用原理由于人们在步行过程中,并不是以一个匀速的状态在行走,而是有一个加速度的变化。
计步器正是利用人们在行走时的变化方式,测量加速度的改变量,每一个加速度的变化,则是意味着人们行走一步,此时计步器通过对加速度的变化量的累加,达到计算人们的行走的步数。
因此计步器的整个控制系统主要分为四个部分,单片机、按键模块、显示模块、加速度传感器模块,计步器的控制系统的结构框图如图1所示。
图1 计步器的控制系统的结构框图整个计步器的控制系统主要由电源模块为其提供电能,从而保障控制系统的正常工作;加速度传感器安装在计步器内,通过人们行走过程中,加速度的变化,产生相应的电流或者电压信号,再将采集的电信号经过A/D转换器进行转换,得到的数字信号输送至51单片机的模块中,然后经过单片机的处理与分析,将结果以液晶屏的方式进行显示;按键模块用于清除步数和调整各个模式等操作。
51单片机的轮式测距仪设计原理
51单片机的轮式测距仪设计原理
51单片机的轮式测距仪设计原理主要基于超声波测距技术。
这种测距仪使
用40kHz的超声波发射器向目标物体发送超声波,并使用接收器接收反射
回来的回波。
通过测量发送和接收回波的时间差,可以计算出目标物体与测距仪之间的距离。
在硬件设计方面,51单片机是核心控制器,负责控制超声波发射器的工作
和接收回波信号。
超声波发射器可以采用40kHz的压电陶瓷或超声波换能器。
接收器通常使用灵敏度较高的超声波探头或麦克风。
在软件设计方面,51单片机通过编程控制超声波发射器的脉冲宽度和频率,以及接收器的数据采集和处理。
程序中需要实现计时器中断、回波处理和距离计算等算法。
通过定时器中断产生40kHz的方波信号,控制超声波发射
器的脉冲宽度和重复频率。
同时,程序中还需要实现回波处理算法,包括信号放大、滤波、检测和阈值比较等步骤,以提取出有效的回波信号。
最后,程序根据计时器和回波处理结果计算出目标物体与测距仪之间的距离,并通过显示模块或串口通信模块将结果输出给用户。
总之,51单片机的轮式测距仪设计原理是基于超声波测距技术,通过单片
机控制超声波发射器和接收器的工作,实现距离的测量和输出。
这种测距仪
具有精度高、测量范围广、抗干扰能力强等优点,广泛应用于机器人、无人机、智能家居等领域。
单片机项目基于51单片机的超声波测距仪的设计说明

企业项目(设计报告)题目:基于51单片机的超声波测距仪的设计院( 系 )专业名称班级学号学生姓名指导教师二O一一年六月摘要由于本课程是开放性的课程,很多东西靠我们自己去查资料进行了解,在实验的过程中我们遇到过很多的问题,实验经过多次繁琐的调试,才能达到预期的效果。
同时我们也是在解决问题的过程中学到了许多平常接触不到的知识,了解和掌握了很多的调试方法和技巧。
通过本次实验,初步认识了超声波将在测距仪中的应用越来越广。
但就目前技术水平来说,人们可以具体利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域,超声波测距仪作为一种新型的非常重要有用的工具在各方面都将有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求,无庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。
在具体的制作过程中我们发现现在书本上的知识与实际的应用存在着的差距,书本上的知识很多都是理想化后的结论,忽略了很多实际的因素,或者涉及的不全面,可在实际的应用时这些是不能被忽略的,我们不得不考虑这方的问题。
同时我们在老师的引导下加深了对专业知识的认识与应用,了解如何对成果的分析与总结,出现的问题该从什么地方入手,如何检查,如何解决。
培养了我们要勇于思考,善于思考的能力。
而分组进行团队实验,既利于激发同学们的参与热情,也有利于促进学员间相互了解、认识,为培养团队协作能力的建立打下基础;为今后同学们进行的工作做好一定的基础。
目录引言 (1)1.超声波测距仪的设计思路 (2)1.1 超声波测距原理 (2)1.2 超声波测距仪原理框图 (2)2.系统的方案设计与论证 (3)2.1 总体设计方案 (3)2.2 系统整体方案的论证 (3)2.2.1 基于单片机的超声波测距系统 (3)2.2.2 基于CPLD 的超声波测距系统 (3)3系统的硬件结构设计 (4)3.1 发射电路的设计 (4)3.2 接收电路的设计 (5)3.3 显示模块的设计 (6)4系统软件的设计 (8)4.1软件的设计的方案 (8)4.2软件的设计流程图 (8)5 系统硬件的调试 (9)6总结 (11)7参考文献 (13)附录一超声波测距程序清单 (14)附录二实物图与原理图对照 (21)引言由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
(整理)用51单片机设计超声波测距系统的设计原理及电路附源程序
基于51单片机的超声波测距仪说明书引言超声波测距仪,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
利用超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制。
一、性能要求该超声波测距仪,要求测量范围在0.08-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、工作原理及方案论证超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
用超声波传感器产生超声波和接收超声波,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器.超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(timeofflight)。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
根据要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距仪的系统框图如下图所示:图1 超声波测距仪系统设计框图三、系统硬件部分硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
1.单片机系统及显示电路单片机采用AT89C52来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
单片机通过P1.1引脚发射脉冲控制超声波的发送,然后单片机不停的检测外中断0口INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。
基于51单片机的测距仪
前言超声波具有指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,性价比很高。
因此在液位、井深、管道长度的测量、移动机器人定位和避障等领域得到了广泛的应用。
随着经济和科学技术的发展,汽车这项代步工具也走近越来越多的家庭,与此同时交通拥挤的状况也越来越严重。
伴随着汽车带来方便的同时,各种事故也层出不穷,其中追尾、倒车碰撞则占据了很大一部分比例。
而在汽车上安装一个测距防撞报警系统则能很好的帮助解决这一问题。
泊车时,系统检测汽车与障碍物的距离并且利用LCD显示,当距离达到某设定值时实施声音报警来提醒驾驶人员。
目录总设计说明 (I)ABSTRACT (II)第1章测距仪现状及意义分析 (1)1.1 本课题研究意义 (1)1.2 国内外现状 (1)1.2.1 国内现状 (1)1.2.2 国外现状 (2)1.3 主要内容及思路 (2)第2章超声波测距原理 (3)2.1 超声波简介 (3)2.1.1 超声波的三种形式 (3)2.1.2 超声波的物理性质 (3)2.1.3 超声波对声场产生的作用 (3)2.2 超声波传感器介绍 (4)2.2.1 超声波测距原理及结构 (4)2.2.2 超声波测距的原理 (6)第3章总体设计 (7)3.1 总体设计要求 (7)3.2 方案选择 (7)3.2.1 控制芯片的选择 (7)3.2.2 超声波模块的选择 (7)第4章系统硬件电路设计 (8)4.1 整体方案设计 (8)4.1.1 系统概述 (8)4.1.2 系统框图 (8)4.2 单片机最小系统电路 (8)4.2.1 单片机介绍 (8)4.2.2 单片机最小系统 (10)4.3 HC-SR04模块 (12)4.3.1 HC-SR04模块使用器件 (12)4.3.2 超声波模块电路 (14)4.3.3 HC-SR04模块工作原理 (15)4.3.4 超声波模块电路 (16)4.4 液晶显示电路 (16)4.4.1 1602液晶简介 (16)4.4.2 液晶引脚说明 (17)4.4.3 指令介绍 (17)4.4.4 液晶的操作时序图 (21)4.4.5 液晶显示模块电路 (22)4.5 报警模块 (22)4.5.1 蜂鸣器的介绍 (22)4.5.2 蜂鸣器报警电路 (23)4.5.3 发光二极管 (23)4.5.4 报警模块电路 (23)4.6 按键输入模块 (24)第5章软件设计 (25)5.1 程序语言及开发环境 (25)5.2 程序流程图 (26)5.2.1 总体流程图 (26)5.2.2 1602液晶程序流程图设计 (27)5.2.3 超声波模块HC-SR04程序流程图设计 (27)第6章总结 (28)鸣谢 (29)参考文献 (30)附录 (30)附录一元件清单 (30)附录二原理图 (31)附录三PCB图 (32)总设计说明超声波是指频率高于20KHZ的声波。
基于51单片机的简易逻辑分析仪设计 _大学论文

本科生毕业设计报告学院物理与电子工程学院专业电子信息工程设计题目:基于51单片机的简易逻辑分析仪设计学生姓名指导教师(姓名及职称)班级学号完成日期:年月基于51单片机的简易逻辑分析仪设计物理与电子工程学院电子信息工程[摘要]本设计完成了一种能进行数字电路中多路数据测试的简易逻辑分析仪。
它以51单片机控制核心,数模转换器为逻辑信号门限电平控制电路,用按键和 12864LCD作为人机交互界面,采用C51进行模块化编程,实现了四路信号的测试,具有成本低,使用方便等特点。
[关键词]数字电路单片机数模转换器逻辑分析仪1 设计任务与要求本设计的主要任务及参数指标是:数据位数4位,存储深度80字;数据速率最高1kHz;输入阻抗大于50kΩ;逻辑信号门限电平在1.0V~4.0V 范围内按8级任意设定。
2 设计方案本系统采用51单片机为控制核心,系统由单片机系统、逻辑电平控制、按键、LCD显示、系统电源等模块构成。
被测数据输入到逻辑电平控制模块,然后进行单片机进行测试,按键用于控制逻辑信号门限电平的大小,系统电源为各模块供电,各模块的供电电压为5V。
图1 系统框图3 设计原理分析3.1 单片机系统电路设计图2 单片机系统电路单片机系统为逻辑分析仪的核心,负责控制逻辑分析仪的逻辑电平、检测按键并驱动LCD 进行显示。
单片机系统电路如图2所示,由晶体振荡器Y1、电容C3和C4构成振荡器电路,为单片机提供时钟信号。
电容C1、电阻R2和R1、按键KEY1构成单片机复位电路,高电平复位,当按键KEY1按下的时间超过2个机器周期以上时,单片机就执行复位操作。
EA 接高电平,单片机首先访问内部程序存储器。
J1为1KΩ的排阻,作为P0口的外部上拉电阻。
在硬件制作时为了方便单片机的测试和功能的扩展,把所有的I/O 口均通过排针引出。
EA/VP 31X119X218RESET 9RD 17WR 16INT012INT113T014T115P101P112P123P134P145P156P167P178P0039P0138P0237P0336P0435P0534P0633P0732P2021P2122P2223P2324P2425P2526P2627P2728PSEN29ALE/P 30TXD 11RXD 10U18051P10P11P12P13P14P15P16P17P00P01P02P03P04P05P06P07P20P21P22P23P24P25P26P27123456789J11K+5Y112M+5RXD TXDRD WRT0T1INT0INT1C322p FC422p FR28.2KC110u F+512J6CON2KEY1SW2R1100..3.2 人机界面电路设计KEY2KEY3KEY4KEY5P03P04P05P06..图3 按键控制电路按键控制电路如图3所示,用于控制逻辑分析仪的工作状态,如采样率改变、逻辑电平的调整等等,单片机通过检测按键对应的I/O 口是否为低电平来判断按键是否按键,为了防止干扰,应在单片机的按键检测程序中加入延时函数。
基于C51单片机的智能鞋的设计与实现
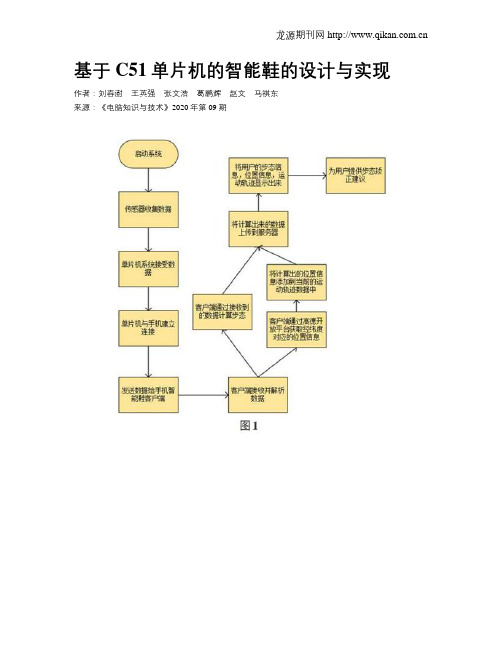
基于C51单片机的智能鞋的设计与实现作者:刘春澍王英强张文浩葛鹏辉赵文马祺东来源:《电脑知识与技术》2020年第09期摘要:近年来,儿童或老年痴呆患者走丢的新闻屡见不鲜。
儿童因为年龄小,天性好动好奇心强烈,容易被事物吸引,在与家长同行时没有跟随家长。
再加上家长疏于看护,就容易发生儿童走丢事件。
而患有老年痴呆的患者,在发病时自身没有意识,无法控制自身行为,容易发生走丢。
又因为老年痴呆发病时没有明显的症状,不像小孩走丢时哭闹会引人注意,所以在搜寻老人时会因为没有线索而增加搜索难度和时间。
走路迈八字步,低头含胸,脚掌拖地是现在很多人的走路习惯。
长期使用这些不标准的姿势走路,会引起身体关节的疼痛,下肢肌肉的过度紧张,严重者会出现很多身体关节疾病,同时也会影响个人的形象气质。
所以,我们决定开发一种智能鞋。
关键词:防走丢;健康;智能鞋;解决方案中图分类号:TP311 文献标识码:A文章编号:1009-3044(2020)09-0246-021 引言当今社会生活节奏快工作繁重,成年人没有太多时间与精力去看护家中的小孩和患病老人,再加上老人和小孩没有较强的自理能力,使得他们很容易发生危险。
同时现在的人们不太注意身体健康,因行走姿势不标准导致的各种身体不适,肌肉紧张和关节疼痛,这些问题极大的影响的人们的生活质量。
随着互联网+的发展,而鞋类又是现代生活的日常穿着用品,所以针对这两个问题提出了一条防走丢“智能鞋”的解决方案。
2 需求分析互联网+的时代已经到来,但在现在的正常生活中,还是有很多我们日常使用的物品没有实现互联网+。
例如现在的鞋类,它现在的功能仅仅只是保护足部,并没有实现如同智能手表和手机一样的智能化,有多种多样功能。
手机与智能手表很便捷,但是总有不方便携带的时候,例如运动时会影响我们活动,这就带来了极大的不便。
现在移动设备普及,定位设备普及,针对儿童走丢不方便寻找的问题,借助定位功能。
手机手表容易丢失,在寻找方面有极大的风险。
51单片机设计测距仪原理及其简单应用-6页word资料

51单片机设计测距仪原理及其简单应用1、40kHZ超声波发射/接收电路综述40kHZ超声波发射电路(1)40kHZ超声波发射电路之一,由F1~F3三门振荡器在F3的输出为40kHZ方波,工作频率主要由C1、R1和RP决定,用RP可调电阻来调节频率。
F3的输出激励换能器T40-16的一端和反向器F4,F4输出激励换能器T40-16的另一端,因此,加入F4使激励电压提高了一倍。
电容C3、C2平衡F3和F4的输出,使波形稳定。
电路中反向器F1~F4用CC4069六反向器中的四个反向器,剩余两个不用(输入端应接地)。
电源用9V叠层电池。
测量F3输出频率应为40kHZ±2kHZ,否则应调节RP。
发射超声波信号大于8m。
40kHZ超声波发射电路(2)40kHZ超声波发射电路之二,电路中晶体管VT1、VT2组成强反馈稳频振荡器,振荡频率等于超声波换能器T40-16的共振频率。
T40-16是反馈耦合元件,对于电路来说又是输出换能器。
T40-16两端的振荡波形近似于方波,电压振幅接近电源电压。
S是电源开关,按一下S,便能驱动T40-16发射出一串40kHZ超声波信号。
电路工作电压9V,工作电流约25mA。
发射超声波信号大于8m。
电路不需调试即可工作。
40kHZ超声波发射电路(3)40kHZ超声波发射电路之三,由VT1、VT2组成正反馈回授振荡器。
电路的振荡频率决定于反馈元件的T40-16,其谐振频率为40kHZ±2kHZ。
频率稳定性好,不需作任何调整,并由T40-16作为换能器发出40kHZ的超声波信号。
电感L1与电容C2调谐在40kHZ起作谐振作用。
本电路适应电压较宽(3~12V),且频率不变。
电感采用固定式,电感量5.1mH。
整机工作电流约25mA。
发射超声波信号大于8m。
40kHZ超声波发射电路(4)40kHZ超声波发射电路之四,它主要由四与非门电路CC4011完成振荡及驱动功能,通过超声换能器T40-16辐射出超声波去控制接收机。
基于STC89C51单片机的智能鞋的设计与开发
15
科技风 2019年 2月
科技创新 DOI:10.19392/j.cnki.16717341.201905013
基于 STC89C51单片机的智能鞋的设计与开发
苏立鑫 王艺凝 虞佳敏 慧
吉林工商学院 吉林长春 130507
摘 要:随着科技的发展和生活质量的提高,人们对弱势群体的关注度越来越高,本文基于 STC89C51单片机,设计了一款以 太阳能供电为基础的集蓝牙、GPS定位系统、导航、语音报警系统、红外线传感器以及人工智能系统为一体的多功能盲人专用智能 鞋,该智能鞋以单片机 STC89C51为主控芯片,结合相关智能传感技术,实现安全出行的目的,弥补了当前市面上的盲人产品所存 在的缺陷。
. Al连l的R智i能g手h表ts,方R便e了s盲er人v用e户d.获取信息;2002年宋建军等设
计的一款结构简单、成本低的盲人过街提示器,利用扬声器的 声音指导盲人过街,具有经济效益和社会效益[3];王海川等人 提出了一款基于压力传感器的盲人智能鞋,该设计采用压力传 感技术和信号处理技术,实现了识别盲道的功能[4];基于以上 研究,本文研究的智能鞋同时从盲人出行安全和便利两个角度 出发,为盲人设计了一款可以 GPS定位,导航,红外线勘测障碍 以及可以语音报警的盲人专用智能鞋。
时可以充分的进行充电并储电,这样,即使在光线不充足以及 没有光照的情况下,鞋子内部设备也能够正常的运行。
3智能鞋模块分析与设计 该智能鞋结 构 框 图 如 下 图 所 示,主 要 包 括 以 下 几 个 组 成 部分: 主控芯 片:STC89C51。本 文 采 用 STC89C51作 为 主 控 芯 片,该芯片是一款采用 8051内核的系统可编程芯片,其最高工 作时钟频率为 80MHz,片上集成 512字节 RAM,具有在系统可 编程特性且速度快,是高速、低功耗的新一代 8051单片机。 电源设计:太阳能蓄电池供电装置。本设计在鞋内部设置 太阳能供电装置,可通过太阳能为系统提供所需能源; 安全防护:GPS定位装置及导航装置; 传感器部分:红外线传感器; 报警部分:语音报警装置; 蓝牙部分:蓝牙装置。
智能自动擦鞋机的设计

2015届分类号:TP368单位代码:10452毕业论文(设计)智能自动擦鞋机的设计姓名李玉青学号XXXXXXXXXXXXX年级 XXXX级专业XXXXXXXXXXXXXXXXXX系(院) XXXXXXXX指导教师 XXXXXXXXX2015年04月10日本论文撰写的是智能自动擦鞋机的设计。
本次设计的系统的主控芯片使用的是51系列的AT89C51单片机,该系统还包括变压器、稳压集成电路7805、对射式红外光电开关、L293D芯片等.这些硬件组成了系统的单片机最小系统模块、电源模块、红外感应模块、电机驱动模块。
其中的单片机最小系统模块是最重要的,单片机最小系统模块的用途是控制系统的正常运行,是全部系统的核心。
该系统的工作方式是通过红外感应模块检测信号,运用AT89C51单片机的运用和处理能力最终实现了擦鞋机传动的目的。
关键字:智能自动;擦鞋机;单片机;红外光电开关Writing of this paper is the design of intelligent automatic shoe machine. The design of the system of the main control chip is using 51 series of AT89C51 single chip microcomputer, the system also includes transformer, voltage regulator IC 7805,correlation type infrared electric switch,L293D chip,etc。
The hardware composition of the system of single chip microcomputer minimum system module, power module,infrared sensor module, motor driver module。
51单片机20个实验,代码详细之欧阳术创编
第一章单片机系统板说明一、概述单片机实验开发系统是一种多功能、高配置、高品质的MCS-51单片机教学与开发设备。
适用于大学本科单片机教学、课程设计和毕业设计以及电子设计比赛。
该系统采用模块化设计思想,减小了系统面积,同时增加了可靠性,使得单片机实验开发系统能满足从简单的数字电路实验到复杂的数字系统设计实验,并能一直延伸到综合电子设计等创新性实验项目。
该系统采用集成稳压电源供电,使电源系统的稳定性大大提高,同时又具备完备的保护措施。
为适应市场上多种单片机器件的应用,该系统采用“单片机板+外围扩展板”结构,通过更换不同外围扩展板,可实验不同的单片机功能,适应了各院校不同的教学需求。
二、单片机板简介本实验系统因为自带了MCS-51单片机系统,因此没有配置其他单片机板,但可以根据教学需要随时配置。
以单片机板为母板,并且有I/O接口引出,可以很方便的完成所有实验。
因此构成单片机实验系统。
1、主要技术参数(1)MSC-51单片机板板上配有ATMEL公司的STC89C51芯片。
STC89C51资源:32个I/O口;封装DIP40。
STC89C51开发软件:KEIL C51。
2、MSC-51单片机结构(1)单片机板中央放置一块可插拔的DIP封装的STC89C51芯片。
(2)单片机板左上侧有一个串口,用于下载程序。
(3)单片机板的四周是所有I/O引脚的插孔,旁边标有I /0引脚的脚引。
(4)单片机板与各个模块配合使用时,可形成—个完整的实验系统。
三、母板简介主要技术参数(1)实验系统电源实验系统内置了集成稳压电源,使整个电源具有短路保护、过流保护功能,提高了实验的稳定性。
主板的右上角为电源总开关,当把220V交流电源线插入主板后,打开电源开关,主板得电工作。
为适用多种需要,配置了+5V,+12V,—5V电压供主板和外设需要,通过右上角的插针排和插孔输出到外设。
此外,还设有螺旋保险插孔保护实验箱。
(2)RS232接口RS232接口通过MAX232芯片实现与计算机的串行通讯,通过接口引出信号。
_基于51单片机的自行车码表设计

内的里程数除以 3 得来的,单位是 m/s。 再经过换算得出 km/h。 把第 [1]刘 勇.基 于 89C52 单 片 机 的 多 功 能 自 行 车 码 表[J].数 字 技 术 与 应
一次所得三秒的里程数保存下来,脉冲清零后,下一个三秒的里程数 用,2012.
和前面的累加和送到液晶显示屏中。 程序流程图如图 2 所示。
图 1 系统设计框图 3 程序设计 软件部分由主程序和定时器中断程序组成,定时器定时三秒钟, 每到三秒钟, 程序会自动进入到中断处理程序去计算速度和里程 数。 中断程序根据三秒内收到的脉冲数,计算自行车前轮滚动多少 次,根据周长计算公式把三秒内的里程数计算出来。 速度是用三秒
While(1){ };// 等待定时器中断 } Void interrupt time0() {
4 程序编写
生活的代步工具又是非常合适。 而自行 车 不 仅 仅 作 为 代 步 的 工 具, Void main()
它的娱乐、休闲、锻炼功能也逐渐被人们挖掘。 同时自行车的使用降 {
低了汽车尾气的排放,能够更加环保 。 对 于 我 们 现 在 这 样 一 个 大 国 Void initimer();// 初始化定时器
[2]赵 小 兰 等 .多 功 能 自 行 车 码 表 设 计 设 计 与 研 发 ,2013
[3]杨凯周岳斌基于 STC51 单片机的自行车码表设计[J].机 械 管 理 与
开 发 ,2015.
!"
[4]王 立 文 .车 速 里 程 表 的 工 作 原 理 及 速 比 的 计 算 方 法 [J]. 黑 龙 江 科 技
ቤተ መጻሕፍቲ ባይዱ
[8]吴健,侯 文 基 于 STC89C52 单 片 机 的 温 度 控 制 系 统[J].电 脑 知 识 与
基才51单片机的鞋套机自动测试系统
基才51单片机的鞋套机自动测试系统罗杰;潘炼【期刊名称】《电子设计工程》【年(卷),期】2012(020)016【摘要】设计了上下位嵌入式系统的结构框架,下机位的测试设备模拟产品的实际工作状态,提供通过原来由传感器所获得的输入信号.并采集产品上电动机的控制信号,分析和判断这个信号,将结果传送到到上位机,由上位机记录结果.测试系统硬件部分以51系列STC12LC5608单片机为核心,测试系统具有可靠性高、操作界面友好、自动化程度强等特点。
%The main content of this paper designs that the system structure is made from the combination of the upper PC and the down embedding system. The down test equipment simulating the products" working condition, and provide the original obtained by the sensor of the input signal, and gathering on the motor control signal, then analysis and judgement of the signal and the results will be sent to the PC, The PC will record the results .The 51series ofSTC12LC5608 as the core of the hardware of the testing system ,and the testing system has the characters of high reliability, friendly interface and almost fully automations.【总页数】3页(P71-73)【作者】罗杰;潘炼【作者单位】武汉科技大学信息科学与工程学院,湖北武汉430081;武汉科技大学信息科学与工程学院,湖北武汉430081【正文语种】中文【中图分类】TP29【相关文献】1.基亏FPGA和51单片机信号发生器设计与实现 [J], 刘灿;代永红;肖伟;梅卫龙2.基才51单片机多功能太阳能路灯的设计与实现 [J], 梅卫龙;肖伟;代森;廖先奎3.千秋大业、人才为本,加快构筑华丰高质量发展的人才之基——特能集团华丰公司召开第一次人才工作会 [J], 吴东斌4.吹响新时代人才工作集结号为强国之路奠定人才之基 [J], 白静5.基于C51单片机的声学换能基阵指向性研究 [J], 刘炜;陆兴华因版权原因,仅展示原文概要,查看原文内容请购买。
51单片机模拟PT2272软件解码设计方法
51单片机模拟PT2272软件解码设计方法在无线遥控领域,PT2262/2272是目前最常用的芯片之一,但由于芯片要求配对使用,在很大程度上影响了该芯片的使用,笔者从PT2262波形特征入手,结合应用实际,提出用51单片机模拟PT2272解码的方法和具体措施。
一、概述PT2262/2272是一种CMOS工艺制造的低功耗低价位通用编解码电路,是目前在无线通讯电路中作地址编码识别最常用的芯片之一。
PT2262/2272最多可有12位(A0-A11)三态地址端管脚(悬空,接高电平,接低电平),任意组合可提供531441地址码,PT2262最多可有6位(D0-D5)数据端管脚,设定的地址码和数据码从17脚串行输出。
PT2262/2272必须用相同地址码配对使用,当需要增加一个通讯机时,用户不得不求助于技术人员或厂家来设置相同地址码,客户自己设置相对比较麻烦,尤其对不懂电子的人来说。
随着人们对操作的要求越来越高,PT2262/2272的这种配对使用严重制约着使用的方便性,人们不断地要求使用一种无须请教专业人士,无须使用特殊工具,任何人都可以操作的方便的手段来弥补PT2262/2272的缺陷,这就是PT2262软件解码。
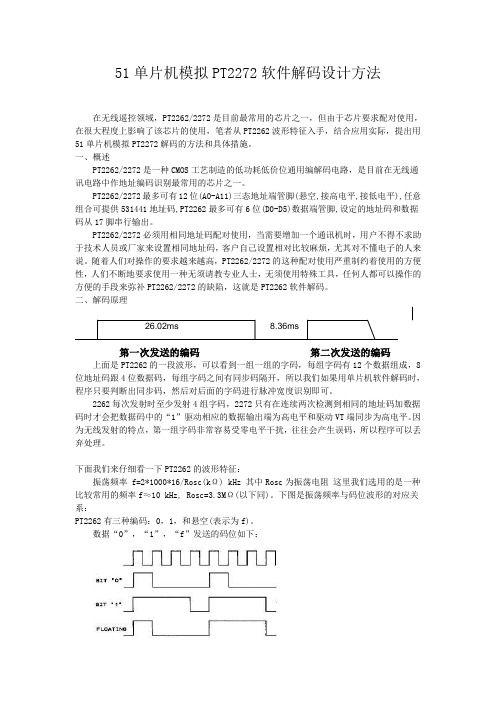
二、解码原理26.02ms 8.36ms第一次发送的编码第二次发送的编码上面是PT2262的一段波形,可以看到一组一组的字码,每组字码有12个数据组成,8位地址码跟4位数据码,每组字码之间有同步码隔开,所以我们如果用单片机软件解码时,程序只要判断出同步码,然后对后面的字码进行脉冲宽度识别即可。
2262每次发射时至少发射4组字码,2272只有在连续两次检测到相同的地址码加数据码时才会把数据码中的“1”驱动相应的数据输出端为高电平和驱动VT端同步为高电平。
因为无线发射的特点,第一组字码非常容易受零电平干扰,往往会产生误码,所以程序可以丢弃处理。
下面我们来仔细看一下PT2262的波形特征:振荡频率 f=2*1000*16/Rosc(kΩ) kHz 其中Rosc为振荡电阻这里我们选用的是一种比较常用的频率f≈10 kHz, Rosc=3.3MΩ(以下同)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机对鞋码匹配仪的设计
1.原理鞋码匹配仪,利用超声波测距的原理。
通过使用超声波遇到障碍返回的特性,计算超声波放出与返回的时间计算来测定障碍与超声波模块的距离。
鞋码匹配仪的固有大小已知,在脚放入时,大小会发生改变使用已知距离对改变后的距离做差获得脚的尺寸,再通过尺寸与距离的转换得到正确的鞋码(此处使用标准鞋码)。
2. 所需元器件(某宝能买到挺便宜的)·超声波模块1个·TPYBoard v102板子1块·四位数码管1个·micro USB数据线1条·杜邦线若干
3. 超声波模块工作原理(1)采用IO 口TRIG触发测距,给最少10us的高电平信号。
(2)模块自动发送8 个40khz 的方波,自动检测是否有信号返回。
(3)有信号返回,通过IO 口ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间*声速(340M/S))/2。
如下图接线,VCC 供5V电源,GND 为地线,TRIG 触发控制信号输入,ECHO 回响信号输出等四个接口端。
4. 控制四位数码管显示数字
(1)1、2、3、4是“位选”针脚,用于控制具体哪一位显示。
(2)a、b、c、d、e、f、g、dp(h)是“段选”针脚,用法和1位数码管一致,用来显示具体的数值。
数码管(位选)TPYBoard v10x开发板1X32X43X54GND(鞋码匹配用不到四位所以该脚拉低)数码管(段选)TPYBoard v10x开发板aX6bX7cX8dY9eY10fY11gY12dp(h)留空(此脚为小数点的控制脚悬空即可)
5. 接线图
6. 源代码
import pyb
from pyb import Pin。