自适应卡尔曼滤波在组合导航中的应用研究
卡尔曼滤波与组合导航原理pdf
卡尔曼滤波与组合导航原理pdf
1 卡尔曼滤波和组合导航原理
卡尔曼滤波(Kalman filtering)是一种广泛应用于机器人技术、控制工程、通信科学、经济学等多个领域的一种小波处理技术。
卡尔
曼滤波是一种采用双向更新的状态估计算法,具有自适应性和准确度。
因此,卡尔曼滤波在导航定位、控制与优化等领域得到了广泛的应用。
组合导航的原理是通过混合不同种类的测量模式,克服个别模式
的局限性,实现更加可靠的导航定位。
它通过四轴机载飞行控制系统、空降定位系统、气溶胶吸收系统、惯性导航系统等不同的传感技术和
测量原理,实现更精确和可靠的导航定位。
同时,组合导航系统可以利用运动学位置确定性的抗差特性,利
用卡尔曼滤波,将运动学观测与动态运动方程校准,使系统在估计模
型的非线性变换和噪声的影响下,保持稳定运行,以达到精确定位的
目的。
因此,通过将卡尔曼滤波与组合导航原理联合起来的方式,组合
导航系统能够实现精确定位,并且更加可靠,具有自适应性和准确度。
另外,由于基于组合导航的定位精度对所采用的传感器类型不敏感,
因此也更具有灵活性,可以根据实际应用情况不断添加和发展新的传
感器。
卡尔曼滤波算法及其在组合导航中的应用综述
V 1 9 No 1 o. .2 2
企 业 技 术 开 发
TECHNOLOGI CAL DEVELOPMENT OF ENTERPRI SE
21 0 0年 6 月
J n .01 u e2 0
卡 尔曼滤 波算法及 其在 组合 导航 中的应 用综述
刘 星 。 谢
利 用 系统 状 态 方 程 、 测 方 程 、 统 噪声 和观 测 噪声 的统 观 系 计 特 性形 成 滤 波 算 法 。
滤 波发 散 。
2 卡 尔曼 滤 波 算法 及 其 发散 抑 制方 法
21 K l n滤 波 算 法 . ama 设 随 线性 离散 系 统 的 方 程 为 :
() 3 () 4
一 T , 1 K k k+rk P- 1 - () 5
k1 _
Q _ 。 k k F。, 1 1 _
估 计 误 差 方 差 阵 : IKHJk P — k - F【 Pk _ 滤 波增 益 :k K= k k - 1 l
Hk k l T R P H k k k + _
一
1 组合导航系统基本特性描述
要描述一个实际系统 , 首先要对其进行建模 , 即建立 系 统 的状 态 方 程 和 测量 方 程 。 于组 合 导 航 系 统 , 进 行 对 要
滤 波计 算 必 须 建 立 数学 模 型 , 模 型具 有 以下 特 点 。 此 11 非 线 性 . 组 合 导 航 系 统 本 质 上 是非 线 性 系 统 ,有 时 为 了减 少 计 算 量及 提 高 系 统 实 时 性 ,在 某些 假 设 条 件 下 组 合 导 航 系 统 的非 线 性 因素 可 以忽 略 ,其 可 以用 线 性 化 的数 学 模
卡尔曼滤波与H∞滤波在INS/GPS组合导航中的应用

0 弓I
舌
式 中 x() 为状 态矩 阵
组 合 导航通 常 采用传 统 的卡尔 曼 ( l n 滤 Kama )
波方法 将 各种传 感 器 的信息融 合在 一起 , 使得 构成 组 合 系统 的各项 性 能 指标 均优 于 2个 子 系 统 单独 工 作 时的性 能 。但 是 在 对 参数 不确 定 系 统 和 有 色 噪声情 况 下 , l n滤波器 效果 难 以令人 满意口 , Kama ] 而近 年来 提 出的 H 滤波方 法对 不 确定 和 有色 噪声
I / S组合 导航 , 何 确 定 y值 以更 好 地 提 高 NS GP 如 精度 是下 一 步研究 的重 点 。
原 理 [ . 安 : 北 工 业 大 学 出 版社 ,0 7 M] 西 西 20.
作者简 介
参 考 文献
波算 法 与 H。滤波 算 法 , 过 VS 0 8编 程 实 现算 。 通 20
法 。对 于滤波 初值 的选 取 , 样 频率 为 1 oHz下 采 0 , 列参 数 由经验 确定 : 状态 X 的初 值 全部 取 零 , 陀螺
2 卡尔 曼 滤 波 与 H。 波 方 程 。 滤
将 上 述 I / S组 合 导 航 模 型 离 散 化 后 分 NS GP 别 建立标 准 卡尔 曼滤 波算 法与 H 滤 波算 法
具 有 较 强 的 鲁 棒 性 能 , 满 足 人 们 对 性 能 的 要 能
x()一 [
8 v
8 8 1 w f] ×  ̄
F £为连 续系 统 的状 态 转移矩 阵 ()
o o 0 o
F = =
一
2
求[ 。研究 了 I / S线 性 系 统 的 滤波 问题 , 2 ] NS GP 分 别用 卡尔 曼滤 波和 H 滤 波解 的实 例仿 真 说 明 了所 提 出方法 的可行性 和正 确性 。
卡尔曼滤波算法及其在组合导航中的应用综述

卡尔曼滤波算法及其在组合导航中的应用综述摘要:由于描述系统特性的数学模型和噪声的统计模型不准确,不能真实反映物理过程,使模型与获得的观测值不匹配从而会导致滤波器发散。
文章在描述组合导航基本特性和卡尔曼滤波原理的基础上提出了滤波发散的问题并提出了抑制发散的方法,最后介绍了卡尔曼滤波在组合导航中的应用。
关键词:卡尔曼滤波;组合导航;发散随着计算机技术的迅速发展,它有条件提供运算速度高、存贮量大的机载计算机,这为组合导航系统的发展创造了一个很好的技术条件,现代控制理论中最优估计理论的数据处理方法为组合导航系统提供了理论基础。
Kalman滤波是R.E.Kalman于1960年提出的从众多与被提取信号有关的观测量中通过算法估计出所需信号的一种滤波算法。
他把状态空间的概念引入到随机估计理论中,把信号过程视为白噪声作用下的一个线性系统的输出,用状态方程来描述这种输入-输出关系,估计过程中利用系统状态方程、观测方程、系统噪声和观测噪声的统计特性形成滤波算法。
1组合导航系统基本特性描述要描述一个实际系统,首先要对其进行建模,即建立系统的状态方程和测量方程。
对于组合导航系统,要进行滤波计算必须建立数学模型,此模型具有以下特点。
1.1非线性组合导航系统本质上是非线性系统,有时为了减少计算量及提高系统实时性,在某些假设条件下组合导航系统的非线性因素可以忽略,其可以用线性化的数学模型来近似描述。
但当假设条件不满足时,组合导航系统就必须采用能反映自身实际特性的非线性模型来描述。
所以说,非线性是组合导航系统本质的特性。
1.2模型不确定性组合导航系统处于实际运行环境当中时,受系统本身以及外部应用环境不确定性因素的影响,系统实际模型与建立的理论模型不能完全匹配,即组合导航系统具有模型不确定性。
造成系统模型不确定性的主要原因如下:①模型简化。
采用较少的状态变量来描述系统,忽略掉实际系统某些不重要的状态特征。
由此造成模型与实际不匹配。
卡尔曼滤波在组合导航数据处理中的应用
we c o mp a r e a n d a n a l y z e t h e n a v i g a t i o n t r a j e c t o r i e s o f d e a d r e c k o n i n g a n d GPS,a n d f i n d t h a t t h e n a v i g a t i o n t r a j e c t o r i e s
电
子
测
量
技
术
第 4 O卷 第 3期
2 0 1 7年 3月
ELECTR0NI C M EAS UREM ENT TECHN0L0GY
卡 尔 曼 滤 波在 组 合 导 航数 据 处 理 中的应 用
黎 蓉
( 1 .三 峡 大 学 电 气 与新 能 源 学 院 宜 昌 4 4 3 0 0 2 ; 2 .新 能 源微 电 网 湖 北 省 协 同 创 新 中心 ( 三 峡 大 学) 宜昌 4 4 3 0 0 2 )
o f d e a d r e c kon i n g a nd G PS a r e a l m os t c o i nc i de n t ,a nd t h e Ka l ma n f i l t e r i ng al g or i t h m c a n i mp r o ve t he a c c ur a cy of
2 .Hu b e i Pr o v i n c i a l Co l l a b o r a t i v e I nn o v a t i o n Ce n t e r f o r Ne w En e r g y Mi c r o g r i d . ( CTGU ) , Yi c ha n g 4 4 3 0 0 2, Ch i n a )
自适应UKF在GNSS/INS紧组合导航中的应用研究

t h e e ic f i e n c y .T h e p o s i t i o n i n g p r e c i s i o n o f mu h i mo d e s a t e l l i t e s s y s t e ms i n c r e a s e s b y 4 9 . 3 8 % .
Ke y wo r d s : G N S S / I N S ; t i g h t l y c o u p l e d ;n a v i g a t i o n ; a d a p t i v e i f l t e r ; U n s c e n t e d K a l m a n F i l t e r ( U K F )
AUKF mo d e l c a n r e s t r a i n t he i n lu f e n c e o f t h e s t a t e e s t i ma t i o n e r r o r s f o r a d a p t i v e e s t i ma t i o n,a n d r e d uc e a b n o r ma l e r r o r s,t h e a c c u r a c y a n d r e l i a b i l i t y o f n a v i g a t i o n s y s t e m a r e i mp r o v e d o bv i o u s l y,a n d i t ha s n o ne g a t i v e i mp a c t o n
t i o n( I A E)i s i m p l e m e n t e d .A 2 1 一 s t a t e i f l t e r u s i n g t i g h t l y c o u p l e d i n t e g r a t i o n s c h e me i s e mp l o y e d o n t h e G N S S /
基于自适应迭代扩展卡尔曼滤波算法的INSBDS组合导航系统

惯性导航系统(Inertial Navigation System ,INS )和北斗卫星导航系统(Beidou Navigation Satellite System ,BDS )是目前两种重要的舰船导航系统。
惯性导航系统(INS )是自主导航系统,仅依靠自身就能进行连续的导航和定位,具有自主、隐蔽等特性,所获取舰船的运动信息完备,但其定位误差是积累的,随着时间的积累而不断增大[1]。
北斗卫星导航系统(BDS )的定位精度系统与第3代GPS 定位精度相当,具有观测时间短、定位连续、精度高、误差不随时间积累等优点,可提供覆盖全球的精准定位、导航和授时(Positioning ,摘要为克服惯性导航系统(INS)的积累误差,提高误差的修正精度,提出了基于多天线北斗差分载波相位的北斗/惯性导航系统组合导航算法。
该算法建立并线性化惯性导航系统(INS)和北斗导航系统(BDS)的状态方程和量测方程,对系统的运动状态参数应用自适应迭代扩展卡尔曼滤波(adaptive iterated extended Kakman filter ,AIEKF)算法进行估计。
仿真结果表明,自适应迭代扩展卡尔曼滤波算法能够提高INS/BDS 组合导航系统的精度和抗干扰能力,验证了自适应迭代扩展卡尔曼滤波算法的有效性。
关键词INS;BDS;组合导航;自适应卡尔曼滤波中图分类号:U666.1文献标识码:A DOI :10.19694/ki.issn2095-2457.2020.04.81基于自适应迭代扩展卡尔曼滤波算法的INS/BDS 组合导航系统INS/BDS Integrated Navigation System Based on Innovation-based Estimation Adaptive Kalman Filter Algorithm张源詹金林韩冰陈伟ZHANG Yuan ZHAN Jinlin HAN Bing CHEN WeiAbstractTo achieve high accuracy for INS,this paper presents an INS/BDS adaptive navigation system for marine application.BDS with multi-antennas Dual-Differential carrier phase observation model provides vessel ’s altitude and is selected as the auxiliary navigation system to fuse with INS to obtain better estimation accuracy of INS errors.In oder to solve the degradationperformance of integrated navigation system caused by BDS unstable measurement disturbs,a novel innovation-based adaptive estimation (AIE)kalman filtering approach is proposed.Simulation results show that the novel innovation-based adaptive estimation kalman filtering surpasses thestandard kalman filter with better accuracy,robustness and lesscomputation.Key wordsInertial navigation system;BDS;Integrated navigation system;Adaptive kalman filter;Innovation-based adaptive estimation张源海军士官学校(蚌埠233012)詹金林海军士官学校(蚌埠233012)韩冰海军士官学校(蚌埠233012)陈伟海军士官学校(蚌埠233012). All Rights Reserved.Navigation and Timing,PNT)服务[2]。
传统组合导航中的实用Kalman滤波技术评述

传统组合导航中的实⽤Kalman滤波技术评述严恭敏,邓瑀(西北⼯业⼤学⾃动化学院,西安710072)摘要:在随机线性系统建模准确的情况下,Kalman滤波是线性最⼩⽅差⽆偏估计。
针对传统惯导/卫导组合导航的实际应⽤,难以精确建模,给出了常⽤的建模⽅法、状态量选取原则、离散化⽅法及滤波快速计算⽅法。
讨论了平⽅根滤波、⾃适应滤波、联邦滤波和⾮线性滤波等技术的适⽤场合,并给出了使⽤建议。
针对前⼈研究可观测度中未考虑随机系统噪声的缺陷,提出了更加合理的以初始状态均⽅误差阵为参考的可观测度定义和分析⽅法。
提出了均⽅误差阵边界限制⽅法,可有效抑制滤波器的过度收敛和滤波发散。
该讨论可为⼯程技术⼈员提供⼀些有实⽤价值的参考。
关键词:捷联惯导系统;组合导航;Kalman滤波;评述0 前⾔估计理论是概率论与数理统计的⼀个分⽀,它是根据受扰动的观测数据来提取系统某些参数或状态的⼀种数学⽅法。
1795年,⾼斯提出了最⼩⼆乘法;1912年,费歇尔(R.A.Fisher)提出了极⼤似然估计法,从概率密度的⾓度考虑估计问题;1940年,维纳提出了在频域中设计统计最优滤波器的⽅法,称为维纳滤波,但它只能处理平稳随机过程问题且滤波器设计复杂,应⽤受到很⼤限制;1960年,卡尔曼基于状态⽅程描述提出了⼀种最优递推滤波⽅法,称为Kalman滤波,它既适⽤于平稳随机过程,也适⽤于⾮平稳过程,⼀经提出便得到了⼴泛应⽤。
在Kalman滤波器出现以后,针对随机动态系统的估计理论的发展基本上都是以它的框架为基础的⼀些扩展和改进[1]。
Kalman滤波器最早和最成功的应⽤实例便是在组合导航领域。
惯性导航系统(Inertial Navigation System,INS)是最重要的⼀种导航⽅式,它能提供姿态、⽅位、速度和位置,甚⾄还包括加速度和⾓速率等导航信息,可⽤于运载体的正确操纵和控制。
惯导具有⾃主性强、动态性能好、导航信息全⾯且输出频率⾼等优点,但其误差随时间不断累积,长期精度不⾼。
卡尔曼滤波在弹道组合导航仿真中的应用
F( 一 ) k 1 为系统噪声驱动阵, k 为量测阵 , ( ) H( ) V k 为
量测 噪声 序列 , ) w( 为系 统激励 噪声 序列 。 现在 的 问题 是 : 给 定 量 测 数 据 { , 在 z()J:i2 ,,
…
并 消 除。两 种方 法 都 使 各 子 系统 内 的信 息互 相 渗 透 , 有 机结合 , 到性 能互 补 的功效 , 由于各 子 系统 的误 起 但
第3 8卷
第 6期
航 空 计 算 技 术
Aeo ui a mp tng Te h i u rna tc lCo u i c n q e
V0 - 8 N 。 I3 o 6
NO . 00 V2 8
20 年 1 月 08 1
卡 尔 曼 滤 波在 弹 道 组 合 导 航 仿 真 中 的应 用
( 的最 小方 差 线 性 无 偏 估 计 ( , 而用 此 估 计 ) ) 进 误 差修 正 系统参 数 , 到 消除系 统误差 的 目的。 达 当组 合系统 采 用线 性 卡 尔 曼 滤 波器 时 , 利 用 间 常
接法进 行估 计 。本文 卡尔 曼滤 波器 取导航 系 统各 状态
差 源和 量测误 差 都 是 随机 的 , 以第 二 种 方 法 远优 于 所
第 一种方 法
,
} , 何寻 找 到状 态 量 ( 的递 推 线性 最 小 方 后 如 )
差滤波估淞 ( 。卡尔曼滤波器 的输入信息是系统 ) 的量测 输 出 z( , 波 器 的输 出则 是 系 统 状 态 矢 量 ) 滤
原 理如 图 1 示 。 所
成 本低 , 而得 到 了广泛 的应用 , 从 但其 导航 精 度 随时 间 的增 长 而增 加 , SN / P 而 IS G S组 合 导 航 系 统 的 精 度则 不随 时 问发 散 。通 常 , SN / P 在 IS G S组合 导航 系 统 中 ,
在组合导航系统中Kalman滤波技术的应用
明组合导航 系统在 导航精度和稳定性方 面较单一的导航 系统都有提高。
关键词 : an n滤波 ; K ha 误差 ; 精度 ; 仿真
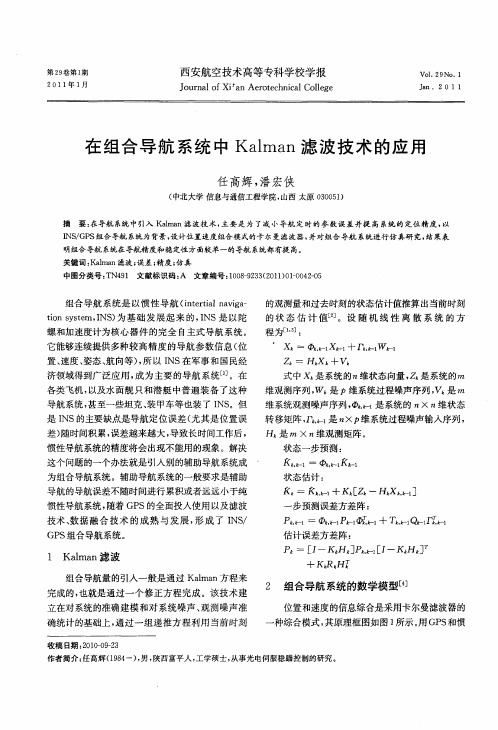
中图分 类 号 : N4 1 文 献 标 识码 : 文 章 编 号 :0 89 3 (0 10 —0 20 T 9 A 10 —2 3 2 1 )10度 的信息综合是采用卡尔曼滤波器的
一
种综合模式 , 其原理框图如图1 所示。 G S 用 P 和惯
作者简介 : 任高辉 (9 4 , , 18 一)男 陕西富平人 , 工学硕士 , 从事光 电伺服稳 瞄控制的研究。
第1 期
任高辉 , : 等 在组合导航系统中 K la ar n滤波技 术的应用 n
惯性 导航系统 的精度将会 出现不 能用 的现象 。解决 这个 问题 的一个 办法就 是引入别 的辅助 导航系统成 为 组合导航 系统 。辅助 导航 系统 的一般 要求是辅 助
导航 的导航误差 不随时 间进行 累积或者 远远小于纯
状 态估计 :
一
R . + K 一 H .1 H [ x - }]
惯性 导航 系统 , 随着 G S的全 面投入使 用 以及 滤 波 P
一
步预测误 差方差 阵 :
技术、 数据融合 技术 的成熟与 发展 , 形成 了 I s N/
GP S组合 导航系统 。
P . — . } 醒 扣 + , 1 卜1 扣1 卜1 _ P 1 1 1 Q卜 估 计误差方 差阵 : P — E 一 K H P H — K H 1 I
程为 引: ,
X : . X 1 n , W }1 卜1 + 扣1 _ Zk— H X 4 Vk -
螺 和加速度计为 核心 器 件 的完 全 自主 式导 航 系统 。 它 能够 连续提供 多种较 高 精 度 的导航 参 数信 息 ( 位 置 、 度、 速 姿态 、 向等 )所 以 I 航 , NS在 军事 和 国民经
推荐-卡尔曼滤波在INSGPS组合导航中的应用研究 文献综述报告 精品

卡尔曼滤波在INS/GPS组合导航中的应用研究一、前言GPS和惯性系统都是目前世界上先进的导航系统,二者各有优缺点。
惯导系统具有不依赖外界信息、隐蔽性好、抗辐射强、全天候等优点,是机载设备中能提供多种较精确的导航参数信息的设备,但是存在着误差随时间迅速积累增长的问题,这是惯导系统的主要缺点。
与惯导系统相比,GPS定位的显著优点是其高精度和低成本。
尤其是利用GPS卫星信号的高精度载波相位观测量进行定位。
但是在GPS导航定位应用中也存在动态环境中可靠性差,定位数据输出频率低的问题。
利用INS和GPS导航功能互补的特点,以适当的方法将两者组合,可以提高系统的整体导航精度及导航性能。
所谓滤波就是从混合在一起的诸多信号中提取出所需要的信号。
估计理论的研究对象是随机现象。
一个系统的运动轨迹是与系统的初始状态和控制作用的性质、大小有关的。
但在实际系统中,除了已知的控制作用以外,经常有一些外界的杂散信号对系统起作用,如在雷达跟踪系统接收的信号中,有很大一部分随机信号,导弹飞行过程中,由于环境等条件的改变而受到随机信号影响等,通常称这一类信号为噪声。
因此在设计自动控制系统时,除了考虑控制作用外,还必须了解噪声的性质、大小,然后通过适当的结构,抑制或滤掉噪声对系统的影响。
只有对系统的状态做到充分精确地估计,才能保证系统按照最佳的方式运行。
当系统中有随机噪声干扰时,系统的综合就必须同时应用概率和数理统计方法来处理。
也就是在系统的数学模型已建立的基础上,通过对系统输入、输出数据的测量,利用统计方法对系统本来的状态进行估计,此类问题就是滤波问题,卡尔曼滤波其就是为实现这一目的而设置的。
二、卡尔曼滤波与组合导航系统将航行体从起始点导引到目的地的技术或方法称为导航。
能够向航行体的操纵者或控制系统提供航行体位置、速度、航向、姿态等即时运动状态的系统都可作为导航系统。
随着科学技术的发展,导航逐渐发展成为一门专门研究导航方法原理和导航技术装置的学科。
自适应Kalman滤波在光纤陀螺SINS/GNSS紧组合导航中的应用

波方 法。采 用改进 的 自适应 卡 尔曼滤 波方 法滤波得 到 导航 参 数 的最优估 计 ,然后对 系统 进行 反馈 补 偿校正, 抑 制 了滤波发 散 问题 , 提 高 了系统的稳 定性 。稳 态测试试 验 结果表 明 : 设 计的 光纤 陀螺 S I N S / G NS S紧组合 导航 系统 具有 较好 的鲁 棒性 ; 在 三颗 卫 星的 条件 下 , 系统 能够 在短 期 内保持 较 高的 导航
王 巍, 向 政, 王 国栋
( 中国航 天 电子技 术研 究 院, 北京 1 0 0 0 9 4 ) 摘 要 :为 了提 高光 纤陀螺捷 联惯 性导航 系统( S I NS ) 和全球 卫 星 导航 系统( G N S S ) 的组合 导航 精度 和
系统稳 定性 , 设 计 了基 于伪 距 、 伪距 率的 紧组合 导航 系统 模 型。针 对 光纤 陀螺 的 白噪 声特 点 , 以及 误
第4 2卷 第 3期
V0 1 . 4 2 NO. 3
红 外 与 激 光 工 程
I n ra f r e d a n d La s e r En g i n e e r i n g
2 0 1 3年 3 月
Ma r . 2 0 1 3
自适应 K a l ma n滤 波在 光 纤 陀螺 S I N S / GN S S紧 组合 导 航 中的应 用
精度 , 验 证 紧组 合 导 航 的 优 越 性 。
关键 词 :光 纤 陀螺 ; 紧组合 导航 ; 伪 距/ 伪距率; 自适应 卡 尔曼滤 波 ; 反 馈补 偿
变分贝叶斯自适应卡尔曼滤波在水下组合导航的应代码

变分贝叶斯自适应卡尔曼滤波在水下组合导航的应代码《变分贝叶斯自适应卡尔曼滤波在水下组合导航的应用》一、引言在水下组合导航系统中,传感器数据往往具有高度的不确定性和复杂的噪声特征,因此如何准确融合多源数据成为了一个非常重要的问题。
变分贝叶斯自适应卡尔曼滤波作为一种先进的多传感器融合算法,在水下组合导航系统中表现出了极大的潜力。
本文将从深度和广度两个方面探讨变分贝叶斯自适应卡尔曼滤波在水下组合导航中的应用,帮助读者更全面地理解这一算法的优势和特点。
二、变分贝叶斯自适应卡尔曼滤波的基本原理1. 贝叶斯滤波介绍我们来简要介绍一下贝叶斯滤波的基本原理。
贝叶斯滤波是一种利用贝叶斯定理对系统状态进行估计的方法,它能够不断地根据新的观测数据对系统状态进行更新,从而得到更加准确的状态估计。
2. 卡尔曼滤波原理我们需要了解一下卡尔曼滤波的基本原理。
卡尔曼滤波是一种线性动态系统状态估计算法,通过不断地对系统状态进行预测和校正,可以提高状态估计的准确性。
3. 变分贝叶斯自适应卡尔曼滤波我们将介绍变分贝叶斯自适应卡尔曼滤波的基本原理。
与传统的卡尔曼滤波相比,变分贝叶斯自适应卡尔曼滤波能够更好地处理非线性系统和非高斯噪声,提高了状态估计的精度和鲁棒性。
三、变分贝叶斯自适应卡尔曼滤波在水下组合导航中的应用1. 传感器数据融合在水下环境中,传感器数据往往具有高度的不确定性和复杂的噪声特征,传统的卡尔曼滤波往往难以处理这些问题。
而变分贝叶斯自适应卡尔曼滤波通过引入变分贝叶斯推断的方法,能够更好地融合多源传感器数据,提高了水下组合导航系统的精度和鲁棒性。
2. 非线性系统建模另外,水下环境中的导航系统往往具有复杂的非线性特性,传统的卡尔曼滤波往往难以准确建模。
而变分贝叶斯自适应卡尔曼滤波通过引入变分贝叶斯推断的方法,能够更好地处理非线性系统,并且能够自适应地调整模型参数,提高了系统的适应性和灵活性。
3. 实际应用案例我们将介绍一些变分贝叶斯自适应卡尔曼滤波在实际水下组合导航系统中的应用案例,帮助读者更好地理解这一算法的实际效果和价值。
卡尔曼滤波技术在潜艇组合导航中的应用研究

卡 尔 滤 波 技 术在 潜 艇 组 合 导航 中 的应用 研 究 曼
杨 彦涛 李光 磊
( .海 军驻 武汉 四六一 厂军 事代 表 室 , 武汉 4 0 8 ;2 1 3 0 5 .海军 驻九 江地 区军事 代表 室 ,九江 3 2 0 ) 3 0 7
摘 要 :高精度 的导航 定位 是潜 艇 研 究 中所 面 临 的主要 难 题之 一 。采用 GP S辅助 的 I / VL组合 导 航是 目 NSD
teet tp e io f K ihg e h si e rcs no E F ih n ma i s
Ke r : n e r t d n v g t n" l n l rn " i l to y wo ds i tg a e a i a i , o Ka ma t ig, mu a i n e s
n i to av ga i n,a nd EKF sc i ompar d wih t e tadii al e t h r ton DR t me hod o hes mul to n t i a i n.T e ul n c e h he r s ti di at st at
估 计精 度 较高 。
关键 词 :组 合导 航
卡 尔曼 滤波
仿真
中图分 类 号 :U6 6 6
文 献标 识码 :A
文章 编号 :1 0 .8 22 1 )40 2 .3 0 34 6 (0 20 —0 4 0
Applc to fK a m a le i g Te hn l g i a i n o l n Fit r n c o o y
0 引 言
潜 艇 因其 具 有 隐 蔽 性 能 好 、机 动 能 力 强 、 突 击 威 力 大 等 特 点 , 自诞 生 之 日起 , 就 以其 独 特 性 能 而 被 誉 为“ 中 蛟 龙 ” 并在 战 争 中发 挥 着 日益 水 ,
卡尔曼滤波在导航系统中的应用

卡尔曼滤波在导航系统中的应用卡尔曼滤波是一种常用的信号处理技术,广泛应用于多个领域,包括导航系统。
导航系统通常由一个或多个传感器组成,如GPS接收机,加速度计,陀螺仪等等。
然而,这些传感器都存在噪声和误差,因此需要一种有效的方式来“过滤掉”这些干扰,并提供更准确的位置和方向信息。
卡尔曼滤波正是这样一种方式,因为它可以结合测量和模型来对位置和方向进行估计。
1. 位置估计卡尔曼滤波可以结合不同类型的传感器来估计位置。
例如,在GPS不可用的情况下,可以使用加速计和陀螺仪来测量车辆的运动状态,并使用卡尔曼滤波器融合这些测量值来估计车辆的位置。
这种方法称为惯性导航(inertial navigation),常用于无人机、航空器等导航应用中。
此外,卡尔曼滤波还可以与GPS和其他传感器一起使用,以提高位置估计的准确性。
2. 姿态估计卡尔曼滤波还可用于姿态估计,即估计三维空间中物体的姿态(即旋转角度)。
对于这种应用,通常使用加速计和陀螺仪来获取物体的加速度和角速度信息,并使用卡尔曼滤波进行融合。
这种方法常用于机器人、飞行器等应用中。
卡尔曼滤波器利用测量值和模型之间的误差来估计真实的位置和方向。
在每个时间步骤中,它使用当前的测量值和过去的状态来更新估计值,并计算新的误差协方差矩阵。
然后,根据系统的模型,它预测下一个时间步骤的状态和误差协方差矩阵,并再次进行更新。
卡尔曼滤波的优点在于,随着时间的推移,它可以逐渐减少误差,并提供更准确的位置和方向估计。
虽然卡尔曼滤波是一种有用的技术,但它仍然存在一些限制。
例如,它可能会受到模型误差的影响,或者可能需要复杂的初始参数设置。
此外,它还需要处理噪声和误差,并且处理不当可能会导致估计的不准确或不稳定。
幸运的是,在实际应用中,有许多改进的技术,如扩展卡尔曼滤波、无迹卡尔曼滤波等,可用于优化卡尔曼滤波的性能。
总之,卡尔曼滤波是一种有用的技术,可以用于多个导航应用中。
虽然它可能需要定期调整和维护,但它仍然是一种值得考虑的方式来提高导航系统的准确性和可靠性。
模糊自适应Kalman滤波在INS/GPS组合导航系统中的应用

1 引 言
一
对 于舰船 I / S测 姿 组 合 导 航 系统 而 言 , NS GP 为稳 定 。
经 典 Kama l n滤 波 技 术 以其 对 系 统 状 态 最 优 估 计 的特性 在组 合导 航 系统 中广 泛应 用 。然而 , 应 用 Kama 波 技 术 需 要 准 确 的系 统 数 学 模 型 和 l n滤 噪声统计 特性 , 精确 或错 误 的模 型 和 噪声 统计 特 不 性 可能 导致 滤波 器性 能变 差 , 至 滤波 发 散 ¨ 。为 甚 】 ]
关键词
组合导航 ;K l n滤波 ; 息 ; ama 新 模糊控制
U6 6 1 6 .
中图 分 类 号
Fuz y Ad p i e K a m a le i g a tv l n Fit rn z
i NS GP ne r td Na iain S se nI / S I tg a e vg t y tm o
( v up n p rme t Na y Eq ime tDe a t n ,Bej g 1 0 3 ) in 0 0 6 i
A s rc T eme s rme t os h NS G S itg ae a iain s se sc mpe n aibe hc o l b t t h a u e n i i t eI / P e r td n v t y tm i o l a d v r l,w i c u a n en n g o x a h d
的 自适 应 模 糊 控 制 Kama 波 算 法 , 过 模 糊 控 制 器 在 线 调 整 量 测 噪 声 方 差 , 制 滤 波 器 发 散 , 而 提 高 导 航 系 统 的精 l n滤 通 抑 从 度 。仿 真 结 果 表 明该 算 法 具 有 比 常规 Ka n滤 波 更 高 的精 度 。 l ma
自适应滤波在GPS IMU/MV组合导航系统中的应用

自适应滤波在GPS IMU/MV组合导航系统中的应用作者:吴延霞王卫东来源:《科技资讯》 2012年第34期吴延霞王卫东(德州学院汽车工程系山东德州 253000)摘要:本文提出了一种自适应数据融合方法,该方法根据位置误差、角度误差和统计信息,采用模糊逻辑控制器对卡尔曼滤波器的增益矩阵K,测量误差协方差R,观测误差协方差Q进行实时修正,将卡尔曼滤波器调整到最优状态。
仿真结果证明该方法比传统卡尔曼滤波具有更高的精度。
关键词:自适应卡尔曼滤波组合导航中图分类号:TP273 文献标识码:A 文章编号:1672-3791(2012)12(a)-0209-01在惯导和GPS导航中,卡尔曼滤波是较广泛的组合算法,计算时通常假设系统噪声和测量噪声是零均值白噪声序列,且已知方差阵Q和R。
但实际上,系统模型不可能完全准确,Q和R的值也将根据测量误差和传感器的信号质量发生变化[1]。
此外,滤波增益系数K是假设当前滤波器处于最优状态计算得出的,在实际作业中,环境的变化对传感器的信号质量会产生影响。
本文采用模糊逻辑控制器对增益K以及Q和R的值修正,根据各传感器的信号质量实时改变融合策略,提高导航的定位精度。
1 自适应卡尔曼滤波的数学模型以建立的两轮车辆运动学的模型为例,如图1所示。
3 仿真试验分析假设车辆从(0,0)点出发,以0.6 m/s的速度沿0°航向作匀速运动,运行时间为100 s。
采样周期为0.01 s。
以横向偏差为例分析本系统的融合滤波效果,如图2所示。
图a为模拟的GPS信号,采样间隔为1 s,图b为MV信号,采样间隔为0.1 s,图c为扩展卡尔曼滤波得到的信号,图d为双模糊自适应卡尔曼滤波得到的信号。
仿真结果表明:双模糊自适应卡尔曼滤波能更好地适应GPS与MV信号的质量偏差,获得偏移量更小,精度更高的定位信号。
4 结论建立了双模糊控制器来检测和防止传统卡尔曼滤波器发散,使其处于最优状态。
通过判断信息序列实时修正系统的过程噪声向量的方差强度阵Q(t)的值,以及通过DR法确定GPS、IMU,MV 信号的质量,进行有选择性的融合,该控制器的输出将实时改变系统的观测噪声向量的方差强度阵R(t)以及新息的值。
Kalman滤波在导航中的应用研究

Kalman滤波在导航中的应用研究洪腾腾;胡绍林【摘要】随着导航技术日新月异的发展,Kalman滤波技术在导航领域中的应用也随处可见。
本文围绕Kalman滤波技术在导航过程中的应用问题,从技术途径的几个方面进行系统分析,简要综述Kalman滤波技术在惯性导航、卫星导航和组合导航等方面应用的发展现状,并指出在导航领域应用Kalman滤波技术存在的若干技术难点,为改进和完善Kalman滤波技术在导航领域的应用提供了潜在的研究方向。
%With the rapid development of science and technology, the Kalman filtering technology is widely used in navigation. In this paper, the application of the Kalman filteringtechnology in the navigation filed were analyzed. The research achievements in recent years were introduced. The application of Kalman filter in the inertial navigation systems, satellite navigation system and integrated navigation system were mainly introduced. At the same time, point out several technical difficulties. Finally, we provide the potential research direction to improve the application of the Kalman filter in navigation.【期刊名称】《自动化博览》【年(卷),期】2016(000)003【总页数】4页(P72-75)【关键词】Kalman滤波;惯性导航;组合导航;扩展Kalman滤波;无迹Kalman滤波【作者】洪腾腾;胡绍林【作者单位】西安理工大学自动化与信息工程学院,陕西西安710048;西安理工大学自动化与信息工程学院,陕西西安710048; 航天器在轨故障诊断与维修重点实验室,陕西西安710043【正文语种】中文【中图分类】TN96520世纪中叶,伴随着电子技术和空间技术的发展,控制学科研究对象由一维的线性定常系统快速发展到多维非线性时变系统。
卡尔曼滤波与组合导航原理

卡尔曼滤波与组合导航原理
卡尔曼滤波是一种用于估计系统状态的算法,它可以通过对系统的测量值和模型进行加权平均来估计系统的状态。
在导航领域中,卡尔曼滤波被广泛应用于航空、航海、汽车等领域的导航系统中,以提高导航精度和可靠性。
组合导航是一种将多种导航技术结合起来的导航方式,它可以通过对多种导航技术的测量值进行加权平均来提高导航精度和可靠性。
组合导航可以结合惯性导航、GPS导航、地面测量等多种导航技术,以提高导航系统的性能。
卡尔曼滤波与组合导航原理的结合可以提高导航系统的性能和可靠性。
在组合导航中,卡尔曼滤波可以用于对多种导航技术的测量值进行加权平均,以提高导航精度和可靠性。
卡尔曼滤波可以通过对系统的测量值和模型进行加权平均来估计系统的状态,从而提高导航系统的性能和可靠性。
在实际应用中,卡尔曼滤波与组合导航原理被广泛应用于航空、航海、汽车等领域的导航系统中。
通过对多种导航技术的测量值进行加权平均,可以提高导航系统的性能和可靠性,从而满足不同领域的导航需求。
卡尔曼滤波与组合导航原理的结合可以提高导航系统的性能和可靠性,从而满足不同领域的导航需求。
在未来的发展中,卡尔曼滤波
与组合导航原理将继续发挥重要作用,为导航系统的发展和应用提供更好的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
K:P l H H H \ P l+R\ -
^ 一
X
X
.
一
l
+
.
—
l
F =E X ] [
=
E ( 一 +X 1 一 +X 1 [ 1 一)( l 一) ]
F + P
=
式中 F=E[ k-1X鼬 k r
不稳 定问题 , 并容易 引起 滤波 发散 。文 中主要探 讨在
噪声统计特征未知 的情况下 , 自适 应 卡尔曼 滤波算 将 法运用到组合导航 中去 。经 过仿 真得 出 , 自适 应 卡尔 曼滤波算法相对于 常规卡尔 曼滤 波 , 高 了收敛速 度 提 和滤波精度 , 具有较高 的 自适应能力 , 对导航精度有进
术 。通 过在 自适应 滤 波算 法 中推算最 优稳 态增 益来 调 整量 测 噪声 , 制 滤 波器 的发 散 , G SIS组 合 导航 系 统实 现 高 抑 为 P/N 精 度导航 提供 了有 效 的途 径 。仿 真结 果表 明该 算法 能很 好地 对 系统状 态进 行最 优 估计 并适 应 系 统 噪声 的变 化 , 具有 比常 规 卡尔 曼滤 波更 高 的导航精 度 。 关 键词 : 合 导航 ; P/N ; 组 G SIS 卡尔 曼滤 波 ; 自适应 滤 波 中图分 类号 :N 6 T 9 文献 标 识码 : A 文章 编号 : 7 — 2X 2 1 )0 0 8 —3 1 3 6 9 (0 1 1 — 13 0 6
( eo at a A tma o ol e Cvl it nU iesyo hn ,ini 3 0 0 , hn ) A rn u cl uo t nC l g , iiAva o nvr t f iaTaj 0 30 C ia i i e i i C n
Absr c : h t a t T e GPS a d I l n NS a e ̄p a l ic s e n t e p p r n o l e a t y d s u s d i a e ,a d c mp rs n ft e ra v n a e d d s d a tg sa e ma e i e h a io so i d a t g s a ia v h n n a e l d n t h
s se y t m.T e smu a o e u t n ia e t a h s fl rn g r h C e e trr s l i y t m t t so t z t n e t t n h i l t n r s l i d c t tt i ti g a o t m a g t b t u t n s se s e p i ai s ma o .Si l i s h i e l i n a ee a mi o i i mu -
0 引 言
由于惯性 导航系统 (N ) IS 和全 球定 位 系统 ( P ) G S 性能互补 , 以 , 所 以该 两个 子系统构造 出组合导航 系统 是航空导航 的最优方 案。美 国空军航空 电子实验室在 下一代军用飞机 的研 究计 划 中指 出 , 卡尔曼 滤波 仍然 是组合导航信息 处理 的关键 技术 。但是 , 在采 用常 规卡尔曼滤波技术 时 , 需要 已知 被研究 对 象数学 模 型 和噪声统计 的先验知识 。如果 当模 型不准或者对噪声 统计特征缺乏 了解 时 , 应用 常规 卡尔曼 滤波 就会 存在
H
C2
●
G S和 I S P N 各有 自己的优点 和 缺点 , 是 两者 在 但 误差传播性 能方 面恰好 是互 补 的, P G S的长期 稳定 性 好, 但短期稳 定性 差 , S与其 正好 相反 , 以我 们 可 I N 所 以采用组合导航技术将这些性 能不 同的导航 系统有 机 地结合在一起 , 从而来提高导航 系统 的整体性 能 。
工业数据识别 与回归 ; 安
制。
接收 到的导航卫 星信号解 算 出航行体 的位置 和速度 , 产生 出来 的误差是 有界 的 , 有全球 性 、 天候 、 具 全 高精
度、 三维定位 、 长期稳定 等优点。
惯性导航 系统 (N ) 于惯性 原 理来 工 作 , 工 IS 基 且
东, 硕士 , 究方 向为智能检测 与智 能控 研
t n o sy i h s a s p ro t fa a t g s se n ie v r a o d t i l o i m a et r n v g to c u a y t a e r g a l n a e u l t a u e r y o d p n y tm o s a i t n a sa g rt i i i i n h h h sb t a i a i n a c r c n t e ulrKama e h h i t l oi fl ra g rt m . e h Ke r s:n e r t d n v g to GPS NS; l ma l rn a a t e fl r g y wo d i t g a e a i a n; i /I Ka n f ti g; d p v t i i e i i e n
算出最优稳态增益阵 K, 得增 益 K不断 与实 际量测 使 数据 { } 相适应… 。
C1
定 向, 能够提供航行体运动状态 的全部信息 。但是 , 惯
导 系统 的计算误差会 随着 时间而 累积 , 对 于续航 时 这 间长 的航行体来说是致命 的缺 陷。
Hq FH g 日 删
・
14・ 8
计算机技术 与发展
第 2 卷 1
作时不需要接收任何 外部信 息 , 不 向外 发 出任何信 也 息, 只依靠 系统本身就 能全 天候 的在全球 范 围 内和 任
何介质环境里 自主隐蔽地进行 连续 的三维空间定 位和
输 出相关 法 自适应滤波的基本途径是根据观测数
据 { l 估计 出输 出相关 函数 序列 { , 由 { 推 z} G}再 C}
pa e .Th a u e n o s n t e I S pr e me s r me tn ie i h N /GPS i t g ae a i a o y t m sc mp e d v ra l n d t e mo e s i a c r c o — n e r t d n v g t n s se i o l x a a ib e,a d li n c u a y s me i n h
董健康 , 安 东
( 国民航 大学 航 空 自动化 学 院 , 津 300 ) 中 天 030
摘 要: 对惯 性导 航 系统 (N ) IS 与全 球导 航系 统 ( P ) 别 进行 了具 体探 讨 , 比 了两者 的优 缺 点 , G S分 对 针对 IS G S 合 导 N/ P 组
航 系统 中 由于模 型不准 或 因量测 噪声 的 复杂 多 变 造成 的发 散 问题 , 引入 了一 种 基 于 输 出相 关 法 的 自适应 卡尔 曼 滤 波 技
n l g o l  ̄an t e d v r e c d p o i e a fe t e wa O r ai e h g r cso a i a i n f r GPS I S i t g a e a i a i n o o y c u d ms l i e g n e a r vd e f c v y t e l i h p e ii n n v g t o h n n i z o / N n e r td n v g to
全球定 位系统( P ) G S 是以子午仪卫 星导 航系统 为 基础 而发展起来 的 , 它吸收 了子午仪系统 的经验 , 根据
自 然科学基金 重点项 目( 0 30 1 6 82 1 ) 作 者简 介: 董健康 ( 9 0 ) 教 授 , 16 一 , 研究 方向为 电子 系统故 障诊 断及
,
一
]
K =( 一F C 朋 日 )( 。一肌 矿 ) 。 一
X…
,
=
d pX =
X¨
一
I +K( X l ) H ¨一 + ]
F=E k kX [ + r l
,
.
]
=qE X 。 b [ 一 +K( X 。 ) H 一 + ]. [ 一 + ( X + ) 。 H 一 ] =,[ I F+K( P ) 9
C
H n f
H “
式中 r是状态的维数 , t A为系统 的可观测 阵
H 日
Cl C2
A =
●
FH = ( A A A)
●
:
2 自适 应 滤 波
自适应滤波是一种具有抑制滤波器 发散作用 的滤
:
C
波方法 , 它在滤波计算 中 , 一方 面利用量测不 断地修 正 预测值 , 同时也对未 知的或不 确切 知道 的系统模 型参 数和噪声统计参数 进行估计 或修 正 , 使滤 波增 益 自动
一
步的提升。
1 GP /NS组 合 导 航 系 统 介 绍 SI
组合导航技术是指使用两种或两种 以上 的不 同导 航 系统对 同一信息源作 测量 , 这些 测量 值 的 比较值 从
中提取 出个 系统的误差并校正之 。采用组合导航技术
的系统称作组 合导航系统 。
收稿 日期 :0 1 0 — 1修 回 日期 :0 1 O — 6 2 1— 3 2 ; 2 1 一 6 0 基金项 目: 天津市科技攻 关计划 重点项 目( 6 F Z X 0 0 ; 0 Y G G 0 70) 国家
St y o ud fAppl a in fAda tv l a Fit r Te hn l g n i to o c p i e Ka m n le c o o y i I e r td vg to S se nt g a e Na i a in y t m