机电系统计算机控制105页PPT
合集下载
机电一体化(第4章微机控制系统)精品PPT课件

3、选择微型计算机
从控制的角度出发,微机应能满足具有较完善的中断系统、 足够的存储容量、完善的I/O通道和实时时钟等要求。 (1) 较完善的中断系统
微型计算机控制系统必须具有实时控制性能。实时控制包含 两个意思: 一是系统正常运行时的实时控制能力;
二是在发生故障时紧急处理的能力。 均需要用完善的中断系统来解决。 (2) 足够的存储容量 微型计算机内存容量有限,当内存容量不足以存放程序和 数据时,应扩充内存,有时还应配备适当的外存储器,用于在调 试阶段暂存程序和数据。 (3) 完备的输入/输出通道和实时时钟 输入/输出通道是外部过程和主机交换信息的通道。有开关量 输入/输出通道、模拟量输入/输出通道,对于需要实现外部设 备和内存之间快速、批量交换信息的,还应有直接数据通道。 实时时钟在过程控制中给出时间参数,记下时间发生时刻, 使系统按规定顺序实现各种操作。
机床控制中常使用的逐点比较法的控制算法和数字积分法的 控制算法;
直接数字控制系统中常用的PID调节的控制算法;
位置数字伺服系统中常用的实现最少拍控制的控制算法;
另外,还有各种最优控制的控制算法、随机控制和自适应控 制的控制算法。
在系统设计时,按所设计的具体控制对象和不同的控 制性能指标要求,以及所选用的微机的处理能力选定一种控 制算法。应考虑所选定的算法是否能满足控制速度、控制精 度和系统稳定性的要求。
提高环境适应性和抗干扰能力。
二、微机控制系统的设计思路
1、确定系统整体控制方案 首先了解被控对象的控制要求,构思微机控制系统的整
体方案。通常,先从系统构成上考虑是采用开环控制还是 闭环控制,当采用闭环控制时,应考虑采用何种检测传感 元件,检测精度要求如何。
其次考虑执行元件采用何种方式,是电动、气动还是液 动,比较其方案的优缺点,择优而选。
机电系统计算机控制哈工大课件
1.4 计算机控制系统的一般要求 稳定性 精确性 快速性
1.4 计算机控制系统的一般要求
性能指标(performance specification)
(1)被控对象的最高运行加速度 (2)被控对象的最高运行速度 (3)最低平滑速度
T N .m Pw nrad / s
9.55
Pw nrpm
稳定判据之三: 双线性变换 bode图
稳定裕度(幅值裕度,相位裕度)
0
w0
w
-180°
w
在相角 1800时,如果20 lg G ( s) 0,即G ( jw) 1, 这时开环传递函数G ( s)
U 0 (s) 1, 系统的输出为收敛的。 U i ( s)
1.4 计算机控制系统的一般要求
2 信号采样与Z变换
•计算机控制系统的信号形式 •信号采样与保持 采样信号、采样定理、量化与量化误差、孔径时间、零阶采样保持器 • Z变换 Z变换与差分方程、Z变换定义、性质、常用定理、 方法、 Z反变换的方法、求 解差分方程
课程内容
3 计算机控制系统分析
•脉冲传递函数 开环系统脉冲传递函数、闭环系统脉冲传递函数 • 计算机控制系统性能分析 稳定性分析 、稳态误差分析、动态响应分析
机电系统的计算机控制
(28学时 学位课)
主讲:陈维山,董惠娟
教材:机电系统计算机控制 陈维山 赵杰 编著 哈尔滨工业大学出版社
课程基础
1.机电系统参数及动力学基础
performance-dependent mechanical factors: 驱动力、驱动力矩、负载、摩擦力、 摩擦力矩、间隙、刚性、惯性、共振频率、传动比对控制系统的影响,如摩擦对 系统的稳态误差的影响、对系统的稳定性、快速性等动态性能的影响。
1.4 计算机控制系统的一般要求
性能指标(performance specification)
(1)被控对象的最高运行加速度 (2)被控对象的最高运行速度 (3)最低平滑速度
T N .m Pw nrad / s
9.55
Pw nrpm
稳定判据之三: 双线性变换 bode图
稳定裕度(幅值裕度,相位裕度)
0
w0
w
-180°
w
在相角 1800时,如果20 lg G ( s) 0,即G ( jw) 1, 这时开环传递函数G ( s)
U 0 (s) 1, 系统的输出为收敛的。 U i ( s)
1.4 计算机控制系统的一般要求
2 信号采样与Z变换
•计算机控制系统的信号形式 •信号采样与保持 采样信号、采样定理、量化与量化误差、孔径时间、零阶采样保持器 • Z变换 Z变换与差分方程、Z变换定义、性质、常用定理、 方法、 Z反变换的方法、求 解差分方程
课程内容
3 计算机控制系统分析
•脉冲传递函数 开环系统脉冲传递函数、闭环系统脉冲传递函数 • 计算机控制系统性能分析 稳定性分析 、稳态误差分析、动态响应分析
机电系统的计算机控制
(28学时 学位课)
主讲:陈维山,董惠娟
教材:机电系统计算机控制 陈维山 赵杰 编著 哈尔滨工业大学出版社
课程基础
1.机电系统参数及动力学基础
performance-dependent mechanical factors: 驱动力、驱动力矩、负载、摩擦力、 摩擦力矩、间隙、刚性、惯性、共振频率、传动比对控制系统的影响,如摩擦对 系统的稳态误差的影响、对系统的稳定性、快速性等动态性能的影响。
机电控制技术PPT教学课件

2020/12/11
8
技术参数
以LX19系列限位开关的主要技术参数为例 型号:LX19、 额定电压:直流:220、
交流:380、 触头对数常开:1、 触头对数常闭:1、 工作行程:3mm、 超行程:1mm
2020/12/11
9
行程开关的用途(日常用途):
行程开关的应用方面 很多,很多电器里面 都有它的身影。它主 要是起连锁保护的作 用。最常见的例子莫 过于其在洗衣机和 录 像机(录音机)中的 应用了。
机电控制基础——行程开关
材料工程122 学号:16-20
2020/12/11
2013年11月19日
1
行程开关的定义:
生产机械中常需要控制某些机械运动的行 程或者实现整个加工过程的自动循环等, 这种控制运动行程的方法叫做行程控制 (限位控制),实现这种控制所依靠的主 要电器是行程开关,又称限位开关。
行程开关是一种根据运动部件的行程位置 而切换电路的电器,它的作用原理与按钮 类似。
2020/12/11
4
行程开关的类型:
一:按运动形式
(1)直动式:动作原 理同按钮类似,所不同的 是:一个是手动,另一个 则由运动部件的撞块碰撞。 当外界运动部件上的撞块 碰压按钮使其触头动作, 当运动部件离开后,在弹 簧作用下,其触头自动复 位。
1:推杆 2&4:弹簧 3:动断触 点 5:动合触点
2020/12/11
5
行程开关的类型:
(2)转动式:当运动机械的 挡铁(撞块)压到行程开关 的滚轮上时,传动杠连同 转轴一同转动,使凸轮推 动撞块,当撞块碰压到一 定位置时,推动微动开关 快速动作。当滚轮上的挡 铁移开后,复位弹簧就使 行程开关复位,这种是单 轮自动恢复式行程开关。
机电设备控制技术一ppt课件
病原体侵入机体,消弱机体防御机能 ,破坏 机体内 环境的 相对稳 定性, 且在一 定部位 生长繁 殖,引 起不同 程度的 病理生 理过程
控制按钮产品外形图
病原体侵入机体,消弱机体防御机能 ,破坏 机体内 环境的 相对稳 定性, 且在一 定部位 生长繁 殖,引 起不同 程度的 病理生 理过程
按钮的型号及符号
接触器的型号及符号
一定要记牢 呀!
病原体侵入机体,消弱机体防御机能 ,破坏 机体内 环境的 相对稳 定性, 且在一 定部位 生长繁 殖,引 起不同 程度的 病理生 理过程
怎么选择接触 器呢?
(1)接触器主触点的额定电压应大于或等于被 控电路的额定电压。
(2)接触器主触点的额定电流应大于或等于1.3 倍的电动机的额定电流。
(二)熔断器 作用:熔断器简称保险丝,短路保护,串接于被保护电路中。
螺旋式熔断器
圆筒形帽熔断器
螺栓连接熔断器
病原体侵入机体,消弱机体防御机能 ,破坏 机体内 环境的 相对稳 定性, 且在一 定部位 生长繁 殖,引 起不同 程度的 病理生 理过程
RT0系列有填料封闭管式熔断器
适用于交流5线路中,作短路保护。
二、相关知识
低压电器:交流 50Hz,额定电压1200V以下, 直流额定电压1500V以下
• 低压电器的分类
按工作方式分 按用途分 按种类分
•手控电器:如刀开关、按钮 •自控电器:如接触器、继电器 •低压控制电器:如刀开关 •低压保护电器:如熔断器 •低压断路器、接触器、继电器、 主令电器和自动开关等
RW3、RW7、RW10 、RW11户外跌落式熔断器
用于交流50Hz额定电压为10kV的电力系统中,作输电线路和电力变压器的 短路和过负荷保护。
机电控制技术PPT课件
第26页/共32页
液体动 力学基础
液体具有黏性,流动状态其分子间会产生摩擦力;流动液体分子 间的摩擦问题较为复杂,为简化研究,不妨假设为理想液体
两点 假设
假设液体是没有黏性的,即不考虑液体的 内摩擦力
油液的可压缩性很小,一般情况下可 忽略不计
第27页/共32页
理想液体在管内作定常流动时,根据物质不灭定律,管内的液 体既不能增多,也不会减少,因此在单位时间内流过管子每个
第1页/共32页
绪论
机电 控制 技术 的 发展 过程
机电控制技术的思想蕴酿于20世纪70 年代,是自动化技术发展的必然产物
二次大战后,系统工程、控制论和信息论三门 科学几乎同时诞生,机电控制技术的产生既是 微电子技术与自动化技术发展的结果,又是信 息论、控制论和系统工程付诸生产实践的结果
在20世纪70年代,现代化的机械将电子技术、 自动化技术、计算机技术融为一体,从而使 机电控制技术进人了所谓的大发展阶段
在密闭管道内作定常流动的理想液体具有三种形式的能量, 即压力能、位能和动能;在沿管道流动的过程中,三种形 式的能量可以以转化,但在任一截面处,其能量的总和为 一常数
第30页/共32页
第31页/共32页
返回
谢谢您的观看!
第32页/共32页
截不可压缩液体作定常流动时的连续性方程:Q = A1v1 = A2v2
流量连续性 方程示意图
第28页/共32页
Pg1 2v1g2 h1Pg2 2v2g2 h2
描述了管流中的压力与流速间的关系,它是能量守恒定律在流动 液体中的表现形式
伯努利 方程
伯努利 方程 示意图
第一章 液压传动控制技术
应用举例 第三节
第一节 第四节
《机电控制技术》图文课件-第二章

2024年7月10日星期三
机电控制技术
目录 上一页 下一页
第二章 直流电动机
2.自励直流电动机 自励直流电动机可分为并励直流电动机、串励直流电动机和复励直流电动机。
1)并励直流电动机 并励直流电动机的励磁绕组与电枢绕组并联, 其接线方 式如图2-6所示。
2024年7月10日星期三
机电控制技术
目录 上一页 下一页
第二章 直流电动机
2024年7月10日星期三
机电控制技术
目录 上一页 下一页
第二章 直流电动机
1.定子部分
1)机座
机座既可以固定主磁极、换向极、端盖等部件, 又是直 流电动机磁路的一部分(磁轭)。机座一般用铸钢或 厚钢板焊接而成, 具有良好的导磁性能和机械强度。
2)主磁极 3)换向极
2024年7月10日星期三
第二章 直流电动机
2)串励直流电动机 3)复励直流电动机
串励直流电动机的励磁绕组与电枢绕组串联后, 接在直 流电源上, 其接线方式如图2-7所示。
复励直流电动机有并励和串励两个励磁绕组, 其接线方 式如图2-8所示。
2024年7月10日星期三
机电控制技术
目录 上一页 下一页
第二章 直流电动机
2.2.2 直流电动机的铭牌参数 直流电动机的铭牌参数主要包含以下几项:
机电控制技术
目录 上一页 下一页
第二章 直流电动机
4)电刷装置
电刷装置与换向器配合可以把转动的电枢绕组电路和 外电路连接并把电枢绕组中的交流量转变为电刷端的 直流电。电刷的个数一般等于主磁极的个数。如图2-2 所示为直流电动机的电刷装置。
2024年7月10日星期三
机电控制技术
目录 上一页 下一页
5机电一体化技术(控制系统)第五章PPT课件
e(t)dtTD
de(t)
dt
G(s)
U(s) E(s)
Kp1T11s
TDs
36
37
计算机控制中的离散控制公式: 代入PID控制公式:及递推公式,位置式PID
38
PID算法软件流程,e(0-1)值取e(0),开始偏差变 化率为0,可使动作不至于过大,因为u(0)=0
39
位置式PID算法的缺点: ❖ 由于全量输出,每次输出均与过去状态有关,
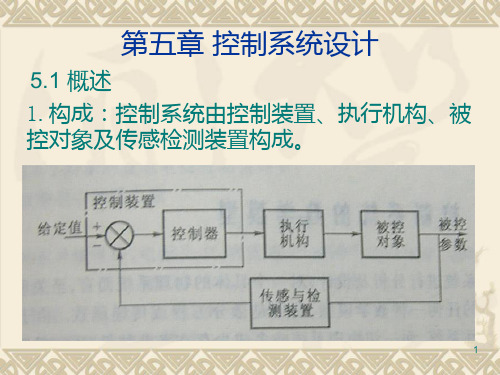
3
3.对控制系统的要求: 稳:针对闭环系统,当参数匹配不当时,会引 起振荡。 准:调节过程结束后输出量与给定量之间的偏 差越小越好。 快:当系统输出量与输入量之间产生偏差时, 消除这种偏差的快速程度。 因系统的稳准快是相互制约的,故被控对象不 同,各种系统对稳准快有所侧重。快速性好, 可能引起振荡,或超调,控制精度变差。
18
传递函数的定义和性质
设线性定常系统由下述阶线性常微分方程描述:
a0d dnnty(t)a1d dnn t 11y(t) an1d dyt(t)any(t) b0d dm m tu(t)b1d dm m t 11u(t) bm1d dut(t)bmu(t)
由定义得系统传递函Байду номын сангаас为
G (s) U Y ( (S s))b a 0 0 s sm n b a 1 1 s sm n 1 1 b a m n 1 1 s s a b m n
24
5)转矩平衡方程及其拉氏变换
Tm(t)
Jem
dm(t)
dt
Bemm(t)TL(t)
(9)
Tm(s)TL(s)Jemsm(s)Bemm(s) (10)
m(s)
Tm(s)TL(s) BemJems
机电控制1
ur (t)
列出uc (t与) u的r (t方) 程关系式。
R
uc (t )
C
(1)根据克希霍夫定律可写出原始方程式: 图2-2
L
di dt
Ri
uc
(t)
ur
(t)
(2.7)
(2)i与输出uc(t)有如下关系:
L
R
di
i
L
uc (t )
dt
Ri
uc (t)
ur
(t)
ur (t)
C
(2.7)
电动机d轴上负载m
a
电磁(2转.1矩6) (牛顿·米)
(惯3)量整(理公后斤得·米:2)
转矩(牛顿·米)
电磁转矩系数
(牛顿·米/安)
JLa
d 2
dt 2
(JRa
fLa )
d
dt
(
fRa
CmKe )
Cmua
La
dM L dt
RaM L
若输出为电动机的转角 ,则按式(2.17)有:
运动部件的质量为M。
阻尼器 (1)根据牛顿第二定律,有弹:簧弹力
f (t)
阻力
k
f
(t)
f1(t)
f2 (t)
M
d2 y dt 2
MM
B
(2)f1(t)和f2(t)为中间变量: (2.1)
yt
f1 (t )
B
dy (t ) dt
(2.2)
f2 (t) ky(Bt为)阻尼比 (2.3)
系统的数学模型:描述系统输入、输出变量以