飞行程序设计6(复飞)
飞行程序设计大纲

《飞行程序设计》课程考试大纲课程名称:《飞行程序设计》课程代码:0800第一部分课程性质与目标一、课程性质与特点《飞行程序设计》是高等教育自学考试交通运输专业独立本科段的一门专业课,是本专业学生学习和掌握空域规划和设计基本理论和方法的课程。
设置本课程的目的是使学生从理论和实践上掌握以NDB、VOR、ILS等设备作为航迹引导设备时,离场程序、进场程序、进近程序、复飞程序和等待程序,以及航路的设计原理和方法。
通过对本课程的学习,使学生熟练掌握目视与仪表飞行程序设计的有关知识,使之能独立完成有关机场的飞行程序设计和优化调整。
二、课程设置目的与基本要求了解飞行程序的总体结构、设计方法;了解飞行程序的分类原则;掌握飞行程序设计的基本准则;能够独立完成有关机场的飞行程序设计和优化调整。
本课程的基本要求如下:1.了解飞行程序的基本结构和基本概念。
2.了解终端区内定位点的定位方法、定位容差和定位的有关限制。
3.了解离场程序的基本概念,掌握直线离场、指定高度转弯离场、指定点转弯离场和全向离场的航迹设计准则、保护区的确定方法、超障余度和最小净爬升梯度的计算方法,以及相应的调整方法;4.掌握航路设计的国际民航组织标准和我国的标准;5.掌握进近程序各个航段的航迹设置准则;6.掌握各种情况下,进近程序各个航段保护区的确定原则;7.掌握进近程序各个航段超障余度和超障高度的计算方法;8.掌握进近各个航段下降梯度的规定,以及梯度超过标准时的调整方法。
9.掌握基线转弯程序的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;10.掌握直角航线的基本概念,出航时间的确定方法,保护区的确定原则,超障余度和超障高度的计算方法;11.掌握ILS进近的基本概念,精密航段障碍物评价方法,以及超障高度的计算方法;12.了解等待程序的基本概念,掌握保护区的确定方法,以及超障余度和超障高度的计算方法;13.了解区域导航程序设计的基本概念。
飞行程序设计-第6章-转弯离场
转弯区内边界(转弯角度≤ 75°)
15 °
平行线
中国民航大学空中交通管理学院
转弯区内边界(转弯角度>75°)
15 ° 平行线
中国民航大学空中交通管理学院
转弯区外边界画法 (转弯角度≤ 90°)
15 °
Ca
r TP b E f
(r2+E2)0.5
P
15 °
平行线
C=(TAS+W)×6 R=(562tgα)/v
以上两种方法可以单独使用,也可以同时使用。
中国民航大学空中交通管理学院
四、指定点(TP)转弯离场
在有条件的机场,为了避开直线离场方向上的高大障碍物, 或受空域等条件限制,需要设计转弯离场时,可以要求航空 器在一个指定点(TP)开始转弯,我们称之为在指定点(TP) 转弯离场。 ➢ 位置适当的导航台和定位点
7.88
1.34
1.04
0.95
9.51
1.047
中国民航大学空中交通管理学院
用最后复飞速度加10% 画转弯区。 很明显,D类必须考虑O1和O3 , C类只需考虑O3 。 若限制指示空速IAS为490km/h,所有航空器都能避开O1 。 O3必须考虑转弯区所需MOC。 ➢ 0.008×(3 500+6 006)=76m,因此,MOC O3 =90m。 ➢ (3 500+6 006)×0.033+5-90=229m。 ➢ O3 =256m>229m 所以不能接受。 还需增加27m(256-229=27)[O3仍高出27m]。
须以适当的余度飞越;或 ➢ 受空域等条件限制,程序要求航空器在规定的航向或由
航迹引导,上升至一个规定的高度再开始转弯。
中国民航大学空中交通管理学院
飞机起飞一发失效应急程序和一发失效复飞应急程序制作规范.
飞机起飞一发失效应急程序和一发失效复飞应急程序制作规范1、目的飞机起飞和着陆的性能分析是飞机性能分析的重要工作。
对于高原和地形复杂机场,制定起飞一发失效应急程序和一发失效复飞应急程序,是飞机起飞和着陆性能分析工作的重要组成部分,对保证飞行安全、提高运行效益意义重大。
为统一超障评估分析方法,规范起飞一发失效应急程序和一发失效复飞应急程序制作标准,特制定本通告。
2、适用范围本通告适用于按照CCAR-121部《大型飞机公共航空运输承运人运行合格审定规则》运行的航空承运人。
3、相关规章3.1 CCAR121.189条(涡轮发动机驱动的飞机的起飞限制):(c)涡轮发动机驱动的飞机不得以大于该飞机飞行手册中所确定的某个重量起飞,在该重量下,预定净起飞飞行轨迹以10.7 米(35 英尺)的余度超越所有障碍物,或者能以一个特定距离侧向避开障碍物。
该特定距离的值为下列两目中规定值的较小值:(i)90米(300 英尺)+0.125D,其中D 是指飞机离可用起飞距离末端的距离值;(ii)对于目视飞行规则飞行,预定航迹的航向变化小于15 度时,为300 米,预定航迹的航向变化大于15度时,为600米;对于仪表飞行规则飞行,预定航迹的航向变化小于15度时,为600米,预定航迹的航向变化大于15度时,为900米。
(d)…确定最大重量、最小距离和飞行轨迹时,应当对拟用的跑道、机场的标高、有效跑道坡度和起飞时的环境温度、风的分量进行修正。
3.2 国际民航公约附件6《航空器运行》第Ⅰ部分附篇C(飞机性能使用限制),起飞越障限制。
4、背景CCAR-121.189条规定了涡轮发动机驱动的飞机的起飞限制要求,这些限制包括了飞机在起飞时如果一台发动机失效,净起飞飞行轨迹以垂直余度超越或以一个特定距离避开障碍物。
2000年2月23日民航局飞标司下发了《关于制定起飞一发失效应急程序的通知》(AC-FS-2000-2)咨询通告,该通告明确了制定起飞一发失效应急程序应考虑的障碍物范围、净轨迹的超障余度要求、转弯坡度规定和分析方法,并要求航空承运人在地形复杂机场运行前,应为所用机型制作在这些机场运行的起飞一发失效应急程序并报局方批准,以保证起飞一发失效后的飞行安全并提高障碍物限制的最大起飞重量。
飞行程序设计-第6章-气压垂直导航

VPA
MOC
D
RDH
FAS 跑道入口
D ATT
平
FAP
30°
MAPt
面 图
XFAS
MOCAPP
VPA
剖 面
图
FAP
αFAS
XFAS 跑道入口
最后进近航段超过5NM的OAS
为保护装备有垂直角度调节(Vertical Angular Scaling)功能的 航空器,当最后进近航段长度超过5NM时,需要对障碍物进 行额外的评估;
(MOCapp – 50)/TAN Z
结果: - 在坐标X处复飞面的高HZi = (XZi – X)TAN Z
HZf = (XZf – X)TAN Z - 若HOBST>HOAS,计算当量障碍物高。
(MDA/H); 没有MAPt; 使用OAS评估障碍物并计算OCA/H。
APV Baro-VNAV程序的关键特征:
考虑低温修正 需要公布运行的最低温度 Baro-VNAV在供垂直引导时没有辅助地面导航设施,障碍物
评估使用类似于ILS的障碍物评估面,但此面的建立却是基于 特定的水平引导系统,Baro-VNAV本身没有水平引导。因此 只能与水平区域导航程序LNAV结合使用。 不能使用远距的高度表拨正值 最低运行标准的分类名称为“LANV/VNAV”
APV SBAS
ILS MLS
GNSS-SBAS
GNSS-GBAS
气压垂直导航(Barometric Vertical Navigation)是一个导 航系统,该系统能够向飞行员显示参考指定垂直航径角 (VPA,通常是3°)的计算得来的垂直引导信息;
由计算机模拟的垂直引导信息是基于气压高度的,表现形式 是从RDH延伸的一个垂直航径角。
飞行程序设计

飞行程序设计目录•前言•第一章飞行程序理论基础• 1.1 飞行程序结构• 1.1.1 离场程序• 1.1.2 进近程序• 1.1.3 进场程序• 1.2 航空器分类• 1.3 飞行程序定位和容差规范• 1.3.1 定位方法分类• 1.3.2 定位容差限制•第二章飞行程序辅助设计系统设计• 2.1 系统功能划分• 2.1.1 航迹和保护区绘制• 2.1.2 障碍物评估• 2.2 几何算法实现• 2.2.1 风螺旋线算法设计• 2.2.2 风螺旋算法实现• 2.2.3 缓冲区算法设计• 2.2.4 缓冲区算法实现• 2.3 用户界面设计• 2.3.1 VBA程序菜单设计• 2.3.2 绘图程序界面设计• 2.3.3 评估程序界面设计•第三章离场程序设计• 3.1 流程描述• 3.2 离场程序要求的参数• 3.3 直线离场• 3.4 转弯离场•指定高度转弯离场•电台上空转弯•交叉定位或DME弧确定TP的转弯离场• 3.5 向台飞行• 3.6 全向离场•第四章等待程序设计• 4.1 流程描述• 4.2 等待程序• 4.2.1 等待程序作图参数• 4.2.2 等待程序模板绘制方法• 4.2.3 模板的作图• 4.2.4 确定定位容差• 4.2.5 基本区作图和交叉定位上空的全向进入作图• 4.2.6 区域缩减原则•第五章复飞程序设计• 5.1 流程描述• 5.2 直线复飞• 5.3 转弯复飞•第六章障碍物评估程序设计• 6.1 评估的一般准则• 6.2 直线离场障碍物评估• 6.3 转弯离场障碍物评估• 6.3.1 指定转弯点的障碍物评价• 6.3.2 指定高度转弯离场的障碍物评价• 6.4 复飞程序评估• 6.4.1 直线复飞障碍物评价• 6.4.2 转弯复飞的障碍物评价• 6.5 等待程序评估•第七章结论前言在国内,飞行程序设计一直以手工设计为主。
随着计算机技术的普及,设计人员在设计过程中使用了一些CAD辅助设计的技巧,但是并没有从根本上解决手工设计效率低下,工作繁重和结果不一致等问题。
飞行程序设计步骤
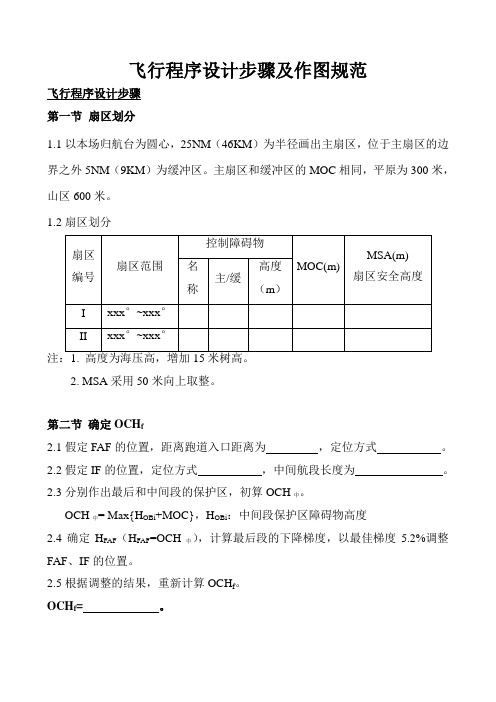
飞行程序设计步骤及作图规范飞行程序设计步骤第一节扇区划分1.1以本场归航台为圆心,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。
主扇区和缓冲区的MOC相同,平原为300米,山区600米。
1.2扇区划分2. MSA采用50米向上取整。
第二节确定OCH f2.1假定FAF的位置,距离跑道入口距离为,定位方式。
2.2假定IF的位置,定位方式,中间航段长度为。
2.3分别作出最后和中间段的保护区,初算OCH中。
OCH中= Max{H OBi+MOC},H OBi:中间段保护区障碍物高度2.4确定H FAF(H FAF=OCH中),计算最后段的下降梯度,以最佳梯度5.2%调整FAF、IF的位置。
2.5根据调整的结果,重新计算OCH f。
OCH f= 。
[注] OCH f是制定机场运行标准的因素之一,也属于飞行程序设计工作的一方面,有兴趣的同学可以参阅《民航局第98号令》。
第三节初步设计离场、进场、进近方法及等待点的位置和等待方法。
(1)进场、离场航迹无冲突,航迹具有侧向间隔,或垂直间隔(低进高出);(2)仪表进场程序根据机场周围航线布局、导航布局以及进场方向,选择合适的进近方式,优先顺序为:直线进近,推测航迹,沿DME弧进近,反向程序,直角航线;(3)注意进场航线设置与几种进近方式的衔接;(4)机场可以根据进场方向设置几个等待航线,等待位置尽可能与IAF点位置一致,但不强求;(5)合理规划导航台布局,最大限度地利用导航台资源。
第四节仪表离场程序设计首先根据机场周边航线分布,确定各个方向的离场方式(直线/转弯);4.1直线离场:4.1.1航迹引导台;4.1.2有无推测航迹,长度KM;4.1.3确定保护区;4.1.4对保护区内障碍物进行评估4.2转弯离场4.2.1根据障碍物分布和空域情况确定使用转弯离场方式(指定点/指定高度)4.2.2确定航迹引导台;4.2.3有无推测航迹,长度KM;4.2.4计算转弯参数4.2.6根据标称航迹确定保护区;4.2.7对保护区内障碍物进行评估各个方向离场方式描述。
飞行程序设计-第6章-转弯离场分解
(b)位于TP(K-K线)之后的障碍物:
MOC max 90m, 0.008 dr d0
其中: d0为从转弯起始区边界到障碍物的最短距离,dr为丛
DER到K-K线的水平距离
转弯起始区内最高障碍物的标高应≤ TNA-90m。
中国民航大学空中交通管理学院
(2)转弯区内障碍物高度要求:
转弯区内最小超障余度(MOC)按下列方法计算:
(a)位于TP(K-K线)之前的障碍物:
MOC max 90m, 0.008 d r d0
*
其中:d0为从转弯起始区边界到障碍物的最短距离,dr*为转
转弯区内边界(转弯角度≤ 75°)
15 ° 平行线
中国民航大学空中交通管理学院
转弯区内边界(转弯角度>75°)
15 °
平行线
中国民航大学空中交通管理学院
转弯区外边界画法 (转弯角度≤ 90°)
C
a
(r2+E2)0.5
r
TP 15 ° 平行线 C=(TAS+W)×6 R=(562tgα)/v r=180v/∏R E=(90/ R )×W 风螺旋线半径=(r2+E2)0.5
185 100 250 135 335 180 380 205 445 240
185 100 240 130 295 160 345 185 425 230
205 110 280 150 445 240 490 265 510 275
D
E
注:Vat是在标准大气条件,最大着陆重量,着陆外型时,航空器失速速度的1.3倍。 * 反向和直角航线的最大速度。
飞行程序设计-第6章-直线离场
在O2处离场保护区的半宽 = 150 + 5500× tan 15°= 1623.7m 。
在O2的RH(要求高)= O2高+MOC=250+44=294 (964ft)。
PDG=(294-5)/5500 = 0.0525 (5.3%)。
练习
两个障碍物都穿透OIS面(都位于跑道中线上)。
爬升梯度规定(单个障碍物)
爬升梯度规定(多个障碍物)
计算爬升梯度不予考虑的障碍物
对于那些离跑道末端较近,而且穿透OIS面的障碍物,
如果障碍物标高加超障余度之和与跑道末端的高差 ≤60m,则在计算程序设计梯度(PDG)时不予考虑,但障 碍物资料应予以公布。
练习
有2个障碍物(标称航迹为跑道中心线方向,假设无航迹引导): O1高40m,在跑道中线上,离跑道起飞末端(DER)2km(横 向距离); O2高250m,位于跑道中线右侧1325m,离DER 5500m (横向 距离) (横向距离) 。
2.无航迹引导有航迹调整时的保护区
3.无航迹引导有航迹调整时的保护区(规定调整点)
转弯最早点
规定的航迹调整点
转弯最晚点
当离场航迹在规定的航迹调整点转弯,转弯最早点和转弯最 晚点确定方法:
a)转弯点的定位容差 b)飞行技术容差(C容差):飞行技术容差所使用的参数如下:
指示空速(IAS):最后复飞的最大速度; 温度:ISA+15°; 风速(W):56km/h; 时间:3秒驾驶员反应+3秒建立坡度延迟; C=(TAS+W)×6秒 转弯最早/最晚点:[d1,d2+C]——距离TP
飞行程序设计(非精密直线进近).

进近、沿DME弧进近、反向或直角程序进近和推测领
航。 4.2.1 起始进近航段形式 直接进近:直线进近、DME弧进近。 反向进近:直角程序、基线转弯、450/1800程序转弯、 800/2600程序转弯。
(1)直线进近
– 起始进近航迹与中间进近航迹的夹角≤120°。
–当夹角超过70°时,则必须确定一条径向线、方位线、
小于 25.5Km 4.6Km ND B
护区,保护区宽度从 IAF 之前 46km 处减少,收敛角为轴
线两侧各30。直到达到起始进近航段保护区宽度。
(2)进场航线长度小于46km(25NM)
当进场航线长度小于 46km,保护区宽度从进场航线 开始从轴线两侧各30度收敛角直至到达起始进近航段规定 的宽度。
(3)转弯保护 进场航段距IAF46km以前的部分,转弯保护按照
雷达引导或 DME 距离提供至少 4km ( 2NM )的提前量,
帮助引导转弯至中间航迹。 –超过≤120°,应考虑直角航线、反向程序或推测航线。
(2)沿DME弧进近 DME弧可以为部分或整个起始进近提供航迹引导。圆 弧的半径最小半径为13km(7NM)。圆弧应在IF或之前与 航迹连接,但圆弧切向与航迹的交角不得超过 120度。如果
– – – 保护区在IF的宽度可缩至4.6km。 距离超过25.5km,从IAF至NDB台位置从9.26km 距离小于25.5km,标称航迹每一侧的保护区宽度,
减小至4.6km,保护区外边界与标称航迹成10.30。
从IAF的9.26km,均匀减小至NDB台位置为4.6km。
25.5Km
4.6Km IAF IF NDB
最后进近航段:
复飞航段:复飞最晚的执行时刻是在MAPt,复飞后,可以选择重新 加入进近程序,或飞向等待点,或加入航路,飞向其他机场。
飞行程序设计-第6章-直线离场

中国民航大学空中交通管理学院
一、直线离场对航迹设置的要求
起始离场航迹与跑道中线方向夹角≤15°为直线离场。 当起始离场航迹不经过跑道起飞末端(DER)时, 在正切跑道起飞末端处的横向距离不得超过300m。 直线离场航线必须在20.0km(10.8NM)以内取得航迹引导。 直线离场允许不超过15°的航迹调整,航空器在航迹调整前,
5m(16ft)
OIS面
DER
HOIS=5m + 距离( DER 飞机所在位置)×2.5%
如果没有障碍物穿透OIS面,则离场程序按标准的梯度 (3.3%)进行设计。
如果有障碍物穿透OIS面,则必须考虑用规定一个航迹以 横向避开这个障碍物,或规定一个程序设计梯度(PDG) 以保证航空器在飞越障碍物时有足够的余度。
End of the Runway)为起点 离场程序的终点:飞机沿固定的飞行航迹到达下一飞行阶
段(航路,等待或进近)允许的最低安全高度/高为止。人
仪表离场程序的形式: —直线离场 —转弯离场 —全向离场
标准的程序设计梯度(PDG: procedure design gradient)为 3.3%。PDG起始于跑道起飞末端(DER)之上5m(16ft)的 一点。
2. 程序设计梯度(PDG)
如果没有障碍物穿透OIS面,则程序设计梯度规定为3.3%, 即等于OIS面的梯度加上0.8%的超障余度。
如果有一个障碍物穿透OIS面,并且无法用规定一条新的 离场航迹避开此障碍物,则首先应算出从OIS面起点至障 碍物最高点的梯度,此梯度加上0.8%的超障余度即为程序 设计梯度,此梯度及这个障碍物必须予以公布。公布的梯 度必须规定至一个高度/高,在此高度以后恢复使用3.3%的 爬升梯度。
飞行程序设计MOC

飞行程序设计MOC飞行程序设计是一门非常“严谨”的学课,几乎每一项内容都有一个专业的名词与之对应。
由此带来的一个问题就是对“新人”不友好,特别是短期培训中,由于时间有限,无法详细涉及过多的词汇,导致很多人对词汇的理解和识记存在困难。
1、MOC Minimum obstacle clearance 最小超降余度这一组词汇中最核心的当属MOC,其它的词汇都与这个词汇有关。
飞机不能贴着地面飞行,一定是留有余度的,飞机与障碍物之间的最小垂直间隔就是MOC。
在不同的航段对MOC的要求是不同的。
对于(仪表)航线飞行,MOC至少为300米,山区可以到600米(山顶上600米飞过时,草甸上的羊和走路的人都可以看得很清楚)。
在非精密进近程序中,起始进近MOC为300米,中间进近MOC为150米,最后进近75米(有FAF)或者90米(无FAF)。
复飞中间阶段MOC为30米,复飞最后阶段MOC为50米。
对于不同的机型,在制定运行标准时,MOC的要求是不一样的。
比如目视盘旋条件下,A、B类MOC为90米,C、D类MOC为120米。
精密进近条件下,A至D类机型超障余度可以从40米到49米不等(精密进近中用高度损失HL来表示这个概念)。
离场初始段超障余度用距离的0.8%来表示,即从起飞离场端5米高度开始,距离每增加1000米,余度增加8米。
2、MEA Minimum en—route altitude最低航路高度与MSA Minimum sector altitude 最低扇区高度从超障的角度来说MEA就是图上标识的最低飞行高度。
(最低飞行高度还需要考虑通信、导航信号的覆盖因素)MSA是以导航台或机场基准点ARP为圆心,半径46公里,外加9公里缓冲区范围内划分扇区,障碍物之上最少300米余度得到的高度。
MEA与MSA都是大范围上的最低高度,它们都需要保持300米以上的MOC。
飞行程序设计-第6章进场进近程序设计

T或Y型程序
居中的起始进近航段可从IF开始。 如果一侧或两侧没有IAF,则不能全向直接进入。这时,可在IAF设置等待航线,以便加入程序。 为便于下降和进入程序,可提供终端进场高度(TAA)。 IAF、IF和FAF均为旁切航路点。复飞航段起始于飞越航路点(MAPt),终止于复飞等待定位点(MAHF)。对转弯复飞,可设置复飞转弯定位点(MATF)来规定转弯点。 保护区宽度可根据适用于程序所用导航系统的容差确定。
5.2%
MINI
2NM+最小稳定距离
0度
0度
-
150米
最优
10NM
70度
0度
平飞
中间进近航段要保证(2NM+转弯最小稳定距离)的航段长度;且要保证至少1.5NM(C/D),1NM(A/B)的平飞段。
中间进近航段约束
*
GNSS保护区半宽
Basic GNSS支持的标准中,RNAV5只能用于航路设计。
*
保护区半宽计算方法
直线保护区半宽+外形连接
*
*
#2022
当XTT或飞行阶段发生变化时,计算保护区宽度有可能发生变化: BV发生改变时,计算保护区宽度需要使用哪个值 使用前一飞行阶段的BV值 (FAF点使用终端的BV,MAPt点使用最后进近航段的BV ) XTT发生改变时,计算保护区宽度需要使用哪个值 使用较小的XTT值
IMAL
ATT
XTT
BV
1/2AW
保护区举例
*
IAF
30NM
5NM
2.5NM
30 °
IF
3.5NM
保护区举例
*
2.5NM
0.95NM
1.45NM
飞行程序设计6(非精密直线进近)

1. 航迹引导:起始进近航段通常要求航迹引导(VOR,NDB, DME),也可采用推测航迹,但距离不得超过19km。 IAF尽量与等待点一致,否则,IAF必须位于等待航线内向台等 待航迹上。
一般情况:保护区宽度为±9.3km(±5NM)
9.如3km果IF为VOR或NDB导航台,保护区可以43缩.67K减m
IAF II如AAFF果航段的一部分离导航台太远,保IF护区IIFFNV应DOBR
扩大
NVDOBR
2.沿DME弧进近 保护区宽度为沿标称航迹±9.3km(±5NM)
170.8.3° °
第四章 非精密直线进近程序设计
精密进近与非精密进近的区别: 精密进近:导航精度高,在着陆前的航段提 供垂直引导 如:ILS、MLS、精密进近雷达(PAR) GPS(有增强系统)
非精密进近:导航精度较低,在着陆前的航段 不提供垂直引导 如:NDB、VOR
非精密进近程序设计准则是进近程序设计的基础。 非精密进近程序设计准则为程序设计的一般准则。
第四章 非精密直线进近程序设计
三、中间进近航段 一般情况:连接起始进近航段保护区在中间进近定位点
的宽度(VOR:≥3.7km,NDB≥4.6km,均≤9.3km)与 最后进近航段保护区在最后进近定位点( VOR:≥1.9km, NDB≥2.3km )的宽度。 当中间进近定位点和最后进近定位点都有导航台时,应 根据导航台在中间进近定位点时保护区的宽度(按前面所 述)和导航台在最后进近定位点时保护区的宽度: VOR±1.9km(±1NM);NDB±2.3km(±1.5NM), 按7.8°(VOR)或10.3°(NDB),从两点向中间扩大, 直至相交。当中间进近航段太短,无法相交时,则用直线 直接相连。 当起始进近航段与中间进近航段之间有夹角时,转弯外侧 保护区将会出现裂缝,应用圆弧连接两航段的保护区(图 4-12)。
如何做好复飞
如何做好复飞作为一名飞行员,对复飞不会觉得陌生。
但就是这应该很熟悉的程序中,却常常诱发“小河沟里翻大船”的不安全事件。
要么油门加不上去,导致仰角大速度小,飞机状态不稳;要么设备使用丢三拉四;要么形态改变时机不当,造成形态超速;要么飞机拉起来之后,飞的高度、航迹不对,通话程序混乱,等等。
从“正常进近着陆”瞬间转到“复飞”,情景突变,这对飞行员的心理和行为能力将产生严重的负面影响。
实际运行中不得不实施的复飞,与模拟机上进行的程式化复飞相比,飞行员经受的心理负荷不尽相同。
实际运行中的复飞我们称其为应激复飞,应激复飞具有以下特征:一般当飞机进入最后进近阶段,机组的惯常思维都是引领飞机正常着陆,但突然出现必须复飞的状况,如跑道入侵;如在DA/H或MDA/H 未建立或者失去目视参考,或是偏差太大不能安全着陆等。
这些正常着陆过程中突然冒出来的危及飞行安全的意外情况,往往出乎机组的意料,心理和技术应对仓促,复飞初期会感到措手不及。
研究表明,从正常思维突然转入非正常思维,没有经过必要的缓冲,飞行员思维短时间处于茫然状态,往往凭直觉或是下意识完成具体动作。
错误大多以飞机姿态控制不当,或状态丢失、操作动作遗忘等现象呈现。
生疏复飞动作,在心平气和者看来不值一提,模拟机训练也不作为重点,在进近简令中也是一带而过。
如果机组成员间没有好好配合模拟演练一下,处于不熟练状态,那么遇到紧急复飞,飞行能力又会降低许多,人的能力或精力一旦顾及不了必须动作,自然会出现“错忘漏”的情况。
许多复飞发生在低高度,可供处置的时间和空间有限。
对于地形复杂、净空条件差的机场,必须按特定的路线边钻山沟边爬升,否则飞机可能会与地面高大障碍物或地形发生相撞。
如连城21号ISL/DME 进近,执行复飞后,因跑道东侧地形险峻,西侧靠近一边航迹处也存在较高地形。
因此,需要严格保持一边复飞航迹爬升,DME7.3ILL(D5.2LCG),高度550米(1804英尺)以上右转飞向LCG,1800米(5905英尺)过台。
part3-飞行程序设计(普及版)

仪表进近程序的组成
等待程序 起始进近 最后进近
进场航段 IAF
FAP IF MAPt 复飞航段 中间进近
根据飞行阶段,仪表飞行程序可以划分 为6个阶段: 起飞离场阶段、 航路阶段, 进场阶段,进近阶段, 复飞阶段和等待阶段。
国内目前主要进行的是起飞离场阶段、进场进近阶段、 等待阶段的设计与研究。
等待
等待程序的设计方法 直角航线程序 进入程序 以导航台为等待点的等待程序的进入按直 角航线程序的进入 方法飞行 出航飞行时间:飞行高度在4250m( 14000ft)或以下时,出航飞行时间为1 分钟;在此高度以上,出航时间为1.5分 钟 以VOR交叉定位点或VOR/DME交叉定位点 作为等待点尽可能按径向线进入
十五、中断进近与复飞
十六、保护区及超障高
规定的飞行航迹两侧和下方划定的没有障 碍物穿透的空间。 不同航段保护区的名称、形状、大小也不 相同。 保护区一般分为主区和副区。 主区一般是以规定航迹为对称轴划定的区 域,航迹(航段)下方提供全额超障余度 。 副区一般是在主区两侧对称划定的区域, 提供自主区边界全额超障余度向副区边界 超障余度逐渐减少为零。
9-1 离场
仪表离场程序假定所有发动机工作 离场程序的起点:以跑道起飞末端( DER:Departure End of the Runway)为 起点 离场程序的终点:飞机沿固定的飞行 航迹到达下一飞行阶 段(航路,等待或 进近)允许的最低安全高度/高为止。
离场
标准的程序设计梯度(PDG: procedure design gradient) 3.3% PDG起始于跑道起飞末端(DER) 之上5m(16ft)的一点。
复飞
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.保护区
保护区的确定原则:
导航台类型 在导航台处的宽度
扩展角
VOR台
±1.9km(1.0NM) 7.8°
NDB台
±2.3km(1.5NM)
10.3°
第四章 非精密直线进近程序设计(续)
3.超障余度 a)复飞起始阶段
障碍物必须满足:hO≤OCA/Hf-MOC 调整方法
提高OCA/Hf 向FAF方向移动MAPt
第五节 目视机动(盘旋)进近
一、航迹对正
正常的限 制
理想的最后进近 航迹
最大限制 导航台 最大限制
正常的限 制
第四章 非精密直线进近程序设计(续)
二、目视盘旋区 计算目视盘旋区半径(R)所需参数:
a) 指示空速(IAS) b) 温度:ISA+15°C; c)高度:计算真空速使用机场标高; d)风:整个转弯使用46km/h(25kt)风速;
第四章 非精密直线进近程序设计(续)
第四节 复飞航段设计
每个仪表进近必须设计一个复飞程序,且只准公布一种 复飞程序。 复飞程序终止
a) 开始另一次进近;或 b) 回到指定的等待航线;或 c) 重新开始航线飞行。 一、复飞航段的结构及复飞的类型 1.复飞航段的三个阶段 :复飞起始阶段、复飞中间阶段、
复飞最后阶段
第四章 非精密直线进近程序设计(续)
b)复飞中间阶段和复飞最后阶段 障碍物的高度(hO)应满足 :hO≤OCA/Hfm+dOtgZ-MOC 调整方法: 提高复飞梯度; 提高OCA/Hfm; 向FAF方向移动复飞点 采用转弯复飞
第四章 非精密直线进近程序设计(续)
五、指定高度转弯复飞 1.保护区 转弯起始区 转弯区 确定保护区所使用的参数:
第四章 非精密直线进近程序设计(续)
3.确定转弯点(TP) 4.超障余度 转弯区Leabharlann 的障碍物的高度(hO)应满足下式:
hO≤OCA/Hfm +(dZ + dO)tgZ – MOC 调整方法 —提高复飞梯度; —提高OCA/Hfm; —移动复飞点;
—移动复飞转弯点。
第四章 非精密直线进近程序设计(续)
1.转弯点的类型及容差区
转弯点为一个导航台时,定位容差区可取±0.9km
转弯点为交叉定位点时,依照第一章的有关准则确定 仅有侧方台的一条径向线、方位线或一个DME距离确
定转弯点时,定位容差区的确定方法如图所示
第四章 非精密直线进近程序设计(续)
2.转弯保护区 转弯保护区的确定方法与指定点转弯离场相同。
第四章 非精密直线进近程序设计(续)
四、不考虑超障余度的目视盘旋区 在目视盘旋区内,最后进近区和复飞区之外有显著障
第四章 非精密直线进近程序设计(续)
第四章 非精密直线进近程序设计(续)
2.确定转弯点(TP)及计算转弯高度/高(TA/H) 3.超障余度
转弯起始区内,障碍物的高度/高(hO)应满足:
hO≤TA/H-MOC 转弯角度≤15°时,MOC为30m 转弯角度>15°时,MOC为50m 调整方法:提高tgZ、提高OCA/Hfm 、移动MAPt、移动TP 转弯区内,障碍物的高度/高(hO)应满足
hO≤TA/H+dOtgZ-MOC 调整方法:提高tgZ、提高OCA/Hfm 、移动MAPt、移动TP
第四章 非精密直线进近程序设计(续)
六、立即转弯复飞 立即转弯复飞是转弯高度等于OCA/Hfm的指定高度转弯
复飞。其设计准则与指定高度转弯复飞相似,但有以下不 同: 计算保护区的“C”容差时:
使用最后进近的最大指示空速、风速使用19km/h。 七、指定点转弯复飞
四、直线复飞 1. 航迹设置
a)复飞起始阶段 复飞起始阶段的复飞航迹应该是最后进近航迹的延续, 不允许改变航向。
第四章 非精密直线进近程序设计(续)
b)复飞中间阶段和复飞最后阶段
可以要求航空器改变航向。转弯角度不得大于15°
该飞行阶段最好有航迹引导,但可以有部分无航迹
引导。中间复飞阶段和最后复飞阶段均无长度限制。
e)转弯坡度:平均达到20°或取得每秒3° 目视盘旋区半径(R)通过下列公式计算求出:
R = 2r + d 式中:r为转弯半径,计算转弯半径时,速度用真空速加
风速(即TAS + W); d为航空器在无风天气条件下,10秒钟时间内飞行的 距离。
D类 C类 B类
A类
R
R
第四章 非精密直线进近程序设计(续)
距离称为纵向容差。
2. 用距FAF的距离确 定的复飞点的纵向容 差
第四章 非精密直线进近程序设计(续)
三、过渡容差(X) 过渡容差是航空器从进近下降过渡到复飞爬升用于航 空器外形和飞行航径的改变所需的修正量。过渡容差 的未端规定为开始爬升点(SOC)。 如果MAPt是一个定位点,过渡容差X是根据航空器最 后进近最大速度,按机场标高,ISA+15℃计算的真空 速(TAS)加上19km/h(10kt)顺风飞行15秒的距离。
a)高度:机场标高加上300m(1000ft) b)温度:ISA+15°C c)指示空速:使用最后复飞速度。如需要可使用中间复飞速
度,但在程序中应注明“复飞转弯的最大速度限制为IAS xxx km/h(kt)”。 d)真空速 e)风 f)平均达到的转弯坡度角:15° g)定位容差 h)飞行技术容差(c):
三、超障余度 目视盘旋区超障余度及有关限制
航空器分类 A
超障余度 m(ft) 90(295)
B
90(295 )
C
120(394)
D
120 ( 394 )
E
150(394 )
最低OCH m(ft) 120(394) 150(492) 180(591) 210(689) 240(787)
最低能见度 Km(NM) 1.9(1.0) 2.8(1.5) 3.7(2.0) 4.6(2.5) 6.5(3.5)
第四章 非精密直线进近程序设计(续)
2. 复飞的类型 —直线复飞 —指定点转弯复飞 —指定高度转弯复飞 —立即转弯复飞
二、复飞点(MAPt)及其容差区 非精密进近程序的复飞点可以是:
一个电台;或 一个定位点;或 离FAF一个距离的点。
第四章 非精密直线进近程序设计(续)
1. 由电台或定位点确定的复飞点的纵向容差 1)复飞点容差区的最早限制 2)复飞点容差区的最晚限制 从复飞点的标称位置到复飞点容差区的最晚限制之间的