从激光扫描数据中提取角点特征的方法
点云中角点的自动提取算法研究

i ma g e ;l a s t ,ma t c h t h e c o r n e r p o i n t s t h a t h a v e b e e n d e t e c t e d,u s i n g t h e s t i t c h i n g p r e c i s i o n t o p r o v e t h e
第 2 2卷 第 1 期 2 0 1 3年 2月
测
绘
工
程
Vo 1 . 2 2 . No . 1
En gi n e e r i n g of Su r ve y i n g a nd Ma pp 3
点 云 中 角 点 的 自动 提 取 算 法 研 究
f o u n d i n g t h e c o r r e s p o n d i n g p o i n t s b e t we e n a d j a c e n t s t a t i o n s . F i r s t , ma k e e a c h s t a t i o n S t h r e e — d i me n s i o n a l
d i s t a n c e i ma g e i n t o t wo — d i me n s i o n a l g r a y i ma g e ,u s i n g t h e r e l a t i v e p o s i t i o n b e t we e n t h e i n s t r u me n t c e n t e r
Ab s t r a c t : Ac c o r d i n g t o t h e r i s i n g p r o b l e ms i n t h e p r o c e s s o f d a t a p r o c e s s i n g s u c h a s d a t a r e g i s t r a t i o n, t e x t u r e ma p p i n g a n d t a r g e t i d e n t i f i c a t i o n, i t p r e s e n t s a n a l g o r i t h m o f c o r n e r d e t e c t i n g ,a i mi n g a t e a s i l y
激光扫描测量技术的数据处理方法

激光扫描测量技术的数据处理方法激光扫描测量技术是一种能够高精度地测量物体形状和尺寸的方法。
随着科技的发展,激光扫描仪的应用越来越广泛,但是如何处理激光扫描仪得到的大量数据成为了一个重要的问题。
本文将介绍几种常见的激光扫描测量技术的数据处理方法,以及它们的优缺点。
一、点云数据处理方法激光扫描仪通过发射激光束到被测物体上,接收激光的反射信号,从而得到点云数据。
点云数据是一组有序的空间点坐标,表示物体表面的三维信息。
处理点云数据是激光扫描测量技术中的核心问题。
1. 点云数据滤波由于环境噪声和仪器误差等原因,点云数据中存在一些无效点和异常点。
滤波是将这些无效点和异常点从点云数据中剔除的过程。
常用的滤波方法有高斯滤波、中值滤波和基于统计学模型的滤波等。
这些滤波方法可以有效地去除点云数据中的噪声,提高数据的质量。
2. 点云数据配准点云数据配准是将多个点云数据集进行匹配,使它们在同一个坐标系下表示被测物体的完整形状。
点云数据配准通常包括刚体变换、非刚体变换和局部配准等方法。
刚体变换是在保持形状不变的情况下对点云数据进行平移、旋转和缩放。
非刚体变换则可以对点云数据进行形变,使其更好地适应被测物体的形状。
3. 点云数据提取点云数据提取是从点云数据中提取出感兴趣的特征信息,如边缘、曲面和拓扑结构等。
点云数据提取的方法有基于几何特征的算法和基于拓扑结构的算法等。
这些方法可以帮助工程师更好地理解被测物体的形状和结构,为后续的分析和设计提供参考。
二、激光测距数据处理方法激光扫描仪能够通过测量激光束在发射和接收过程中的时间差,从而得到被测物体的距离信息。
激光测距数据的处理也是激光扫描测量技术中的重要环节。
1. 激光测距误差校正激光扫描仪在测量过程中可能会受到环境光、温度变化和仪器本身的误差等因素的影响,从而导致测距数据的误差。
误差校正是根据激光扫描仪的特性和实际测量情况,对测距数据进行补偿和修正的过程。
常用的误差校正方法有零点校准、增益校准和非线性校准等。
激光slam技术的原理和应用
激光slam技术的原理和应用激光SLAM技术的原理和应用激光SLAM(Simultaneous Localization and Mapping)技术是一种基于激光雷达的同时定位和建图技术,它通过使用激光雷达扫描环境,实时获取周围的地理信息,并利用这些信息进行自主定位和建立环境地图。
激光SLAM技术的原理可以概括为以下几个步骤:1. 数据获取:激光雷达通过发射激光束并接收反射回来的光线,利用光的传播速度和接收时间差计算出距离信息。
通过旋转或调整激光雷达的角度,可以获取周围环境的三维点云数据。
2. 特征提取:从激光雷达获取的点云数据中,提取出具有代表性的特征点,如角点、平面点等。
这些特征点可以用来进行地图的构建和定位。
3. 地图构建:通过特征点的集合,可以构建环境的地图。
构建地图的算法可以根据特征点的位置和特征进行优化和调整,以减少地图的误差。
常见的地图表示方式有栅格地图、拓扑地图和点云地图等。
4. 定位更新:在地图构建的同时,激光SLAM技术还可以实时进行自主定位。
通过与地图进行匹配,可以确定机器人当前的位置。
定位更新可以通过滤波算法(如卡尔曼滤波、粒子滤波等)来实现,以提高定位的准确性。
激光SLAM技术的应用非常广泛,以下列举几个常见的应用领域:1. 自动驾驶:激光SLAM技术是实现自动驾驶的关键技术之一。
通过激光雷达扫描周围环境,实时构建高精度的地图,并实现精确定位,可以使自动驾驶车辆在复杂道路条件下实现精确的定位和路径规划。
2. 无人机导航:激光SLAM技术在无人机导航中也有广泛的应用。
通过激光雷达扫描周围地形,可以构建高精度的地图,并实现无人机的自主定位和避障,实现精确的飞行路径规划。
3. 室内导航:激光SLAM技术可以应用于室内导航系统中。
通过激光雷达扫描室内环境,构建室内地图,并实现用户的定位和导航。
这对于大型建筑物、商场等复杂环境的室内导航非常有用。
4. 智能仓储:激光SLAM技术可以应用于智能仓储系统中,实现自动化的货物搬运和仓库管理。
激光雷达的数据处理与应用

激光雷达的数据处理与应用一、激光雷达概述激光雷达(LIDAR)是一种利用激光束扫描物体并测量距离、速度和方向的遥感技术。
它有着高精度、高分辨率、远距离、全天候、三维数据等优点,广泛应用于机器人、自动驾驶、测绘、地质勘探、城市规划等领域。
二、激光雷达数据处理激光雷达所采集的数据一般为三维点云数据,是由一个光束扫描得到的数据集合。
点云数据的处理主要包括数据去噪、地面提取、特征提取、点云配准等步骤。
1. 数据去噪数据去噪是点云处理过程中的重要一步,可以提高后续处理的效率和数据的准确性。
常见的数据去噪方法有Hampel滤波、高斯滤波、形态学滤波等。
2. 地面提取激光雷达所采集的点云数据中包含了地面、建筑物、植被等信息。
在机器人、自动驾驶等应用场景中,地面信息是非常重要的。
地面提取可以采用基于聚类、分割、曲面拟合等方法,例如RANSAC算法、最小二乘法等。
3. 特征提取在机器人、自动驾驶等场景中,需要从点云数据中提取出一些特征信息,例如建筑物的角点、墙面等信息。
特征提取可以采用Harris角点检测、SIFT、SURF等方法。
4. 点云配准激光雷达常常需要在不同的时间、位置、角度下采集数据,不同数据之间需要进行配准。
点云配准可以采用基于特征的配准、基于ICP(Iterative Closest Point)的配准等方法。
三、激光雷达应用激光雷达的广泛应用使其逐渐成为人工智能、机器人、自动驾驶等领域的重要技术之一。
下面列举几个典型的应用案例。
1. 机器人导航激光雷达可以用于机器人的导航和避障。
机器人通过激光雷达获取周围环境信息,结合自身运动状态,利用SLAM (Simultaneous Localization And Mapping)算法构建环境地图,实现自主导航。
2. 自动驾驶激光雷达是自动驾驶系统中不可或缺的部分。
它可以获取周围环境信息,包括道路、车辆、行人等,实现自动驾驶车辆的感知与决策。
3. 测绘激光雷达可以用于地形测量、海洋勘探、空中摄影等测绘领域。
激光雷达点云分析中的特征提取方法与应用

激光雷达点云分析中的特征提取方法与应用激光雷达作为一种高精度、高分辨率的三维感知设备,在自动驾驶、环境建模等领域中得到了广泛的应用。
而在激光雷达数据的处理过程中,点云分析是一项关键技术,其目的是从原始的点云数据中提取出有用的特征信息,以实现对环境的认知和理解。
激光雷达点云数据是在三维空间中获取的一系列点的集合,每个点包含了位置坐标和反射强度等信息。
然而,原始的点云数据面临着数量庞大、密度不均匀以及噪声干扰等问题,因此需要通过特征提取方法来对点云数据进行处理和分析。
在激光雷达点云分析中,常用的特征提取方法包括几何特征和描述符特征。
几何特征是通过计算点云的几何属性来描述点云的形状、结构和分布等特征。
例如,点云的法向量可以用于表征曲面的光滑度和变化趋势,曲率可以用来辨识边缘和角点等特征。
此外,还可以使用基于形状的特征,如球面度、曲率变化等来描述点云。
描述符特征是通过计算点云中每个点周围的局部结构信息来描述点云的特征。
常见的描述符包括法向直方图、表面积等。
法向直方图表示了点云中每个点的周围法向量的统计分布情况,可以用于点云的分类和聚类等任务。
表面积描述了点云在局部区域内的曲面形状,可用于表征点云的平滑度和纹理信息。
特征提取方法的选择和应用取决于具体的任务需求。
例如,在点云配准和拓扑图构建中,可以使用几何特征来识别关键点,实现点云的匹配和对应。
而在目标检测和识别中,则更常使用描述符特征,通过计算点云中每个点的局部结构信息,来高效地进行目标的分类和识别。
除了特征提取方法,点云分析中还需要考虑数据的预处理和降维技术。
预处理包括对点云数据进行滤波、去噪和重采样等操作,以减少数据的冗余和噪声。
降维技术可以通过保留点云数据中的重要信息,减少数据的维度,提高后续处理的效率。
激光雷达点云分析在自动驾驶、环境感知、三维建模等领域有着广泛的应用。
例如,在自动驾驶中,点云分析可以用于实时地检测和识别交通标志、行人和车辆等目标,从而实现智能驾驶。
图像中角点(特征点)提取与匹配算法
角点提取与匹配算法实验报告1 说明本文实验的目标是对于两幅相似的图像,通过角点检测算法,进而找出这两幅图像的共同点,从而可以把这两幅图像合并成一幅图像。
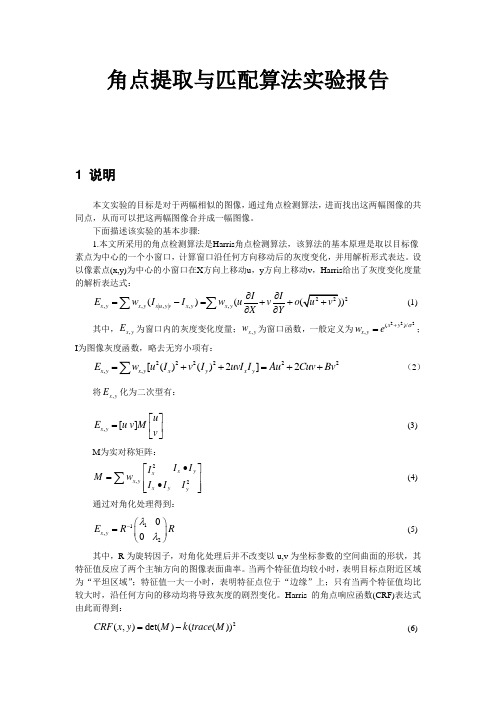
下面描述该实验的基本步骤:1.本文所采用的角点检测算法是Harris 角点检测算法,该算法的基本原理是取以目标像素点为中心的一个小窗口,计算窗口沿任何方向移动后的灰度变化,并用解析形式表达。
设以像素点(x,y)为中心的小窗口在X 方向上移动u ,y 方向上移动v ,Harris 给出了灰度变化度量的解析表达式:2,,|,|,,()(x y x y x u y v x y x y I I E w I I w uv o X Y∂∂=-=++∂∂∑∑ (1) 其中,,x y E 为窗口内的灰度变化度量;,x y w 为窗口函数,一般定义为222()/,x y x y w e σ+=;I 为图像灰度函数,略去无穷小项有:222222,,[()()2]2x y x y x y x y E w u I v I uvI I Au Cuv Bv =++=++∑(2)将,x y E 化为二次型有:,[]x yu E u v M v ⎡⎤=⎢⎥⎣⎦(3)M 为实对称矩阵:2,2x y x x y x y y I I I M w I I I •⎤⎡=⎥⎢•⎢⎥⎣⎦∑ (4)通过对角化处理得到:11,200x y E R R λλ-⎛⎫= ⎪⎝⎭(5)其中,R 为旋转因子,对角化处理后并不改变以u,v 为坐标参数的空间曲面的形状,其特征值反应了两个主轴方向的图像表面曲率。
当两个特征值均较小时,表明目标点附近区域为“平坦区域”;特征值一大一小时,表明特征点位于“边缘”上;只有当两个特征值均比较大时,沿任何方向的移动均将导致灰度的剧烈变化。
Harris 的角点响应函数(CRF)表达式由此而得到:2(,)det()(())CRF x y M k trace M =-(6)其中:det(M)表示矩阵M的行列式,trace(M)表示矩阵的迹。
基于激光视觉的角焊缝图像特征点提取

W u B,Xue T,Zhang T,et a1. A novel method for round steel
measurement with a muhi—line structured light vision sensor[J]. Measurement Science and Technology,2010,21(2):025204 —
2008,13(1):64—68. [5] Steger C.Unbiased extraction of lines with parabolic and Ganssian
profiles[J]. Computer Vision and Image Understanding,2013, 117(2):97—112. [6] 赵小松 ,张 国雄 ,张宏 伟.测量 强反 射表面 的测头 研究 [J]. 天津大学学报 ,2004,37(3):274—277.
W ang Dayong,Feng Jicai. Obtaining of young equation by prinei·
ple of energy and establishment of wetting an@e model[J].Trans- actions of the China Welding Institution,2002,23(6):59-61.
测绘技术中的激光扫描数据处理技巧与方法

测绘技术中的激光扫描数据处理技巧与方法激光扫描技术是现代测绘领域中的一项重要技术,它通过激光设备以及相应的数据处理方法,能够高效准确地获取地物的三维信息。
本文将介绍一些激光扫描数据处理的技巧与方法,希望能对相关领域的研究者和从业人员提供一些帮助。
一、激光扫描数据获取与预处理在进行激光扫描前,需要选择合适的激光扫描设备,常见的有激光扫描仪和激光雷达。
扫描时需要注意设备的参数设置,如扫描速度、激光功率、扫描精度等,以及扫描范围和扫描密度的选择。
激光扫描仪通常通过激光束的反射来获取地物的三维信息,激光雷达则利用激光束的回波信号来确定地物的位置和形态。
在采集数据的过程中,需要将扫描获得的原始数据进行预处理,包括去除噪声、校正扫描位置误差等。
这些预处理操作对后续数据处理的准确性和效率有着重要的影响。
二、激光扫描数据配准与匹配激光扫描数据配准是指将采集到的多个扫描点云数据进行坐标系的统一,以获得完整的三维信息。
常见的配准方法有基于特征点匹配和基于区域的匹配。
特征点匹配是通过提取扫描数据中的特征点,如突出的边缘、角点等,再对这些特征进行匹配,从而实现数据的配准。
而基于区域的匹配则是先将扫描数据划分为不同的区域,再通过对区域进行匹配来实现数据配准。
这两种方法各有优劣,需要根据实际情况进行选择与应用。
三、激光扫描数据的点云处理与分析点云是激光扫描数据中最基本的形式,它由大量的密集分布的点构成,这些点包含了地物的位置、形态等信息。
在进行点云处理与分析时,需要思考解决的问题和目标,然后选择合适的方法来提取所需信息。
点云处理与分析的方法多种多样,例如曲面重建、物体识别、变形分析等。
曲面重建是将散乱的点云数据进行拟合和曲面提取,以获得平滑连续的表面模型。
物体识别则是通过分析点云数据的形态、密度等特征来识别不同的地物。
变形分析则是通过比较不同时间点的点云数据,以检测地物的形变情况。
四、激光扫描数据的可视化与展示激光扫描数据处理的最终目的是将获得的三维信息直观地呈现给使用者。
2D激光SLAM中特征角点的提取方法
第53卷第3期2021年6月Vol.53No.3Jun.2021南京航空航天大学学报Journal of Nanjing University of Aeronautics&Astronautics2D激光SLAM中特征角点的提取方法刘朋,任工昌,何舟(陕西科技大学机电学院,西安710021)摘要:自主机器人定位中,从激光雷达扫描数据提取出精确的环境特征将能大幅提高即时定位与构图(Simultaneous localization and mapping,SLAM)技术中匹配的速度。
目前,特征提取算法大多采用迭代计算的方法,计算复杂度高,计算量较大。
针对此问题,提出了一种角点特征的提取方法。
该方法避免了迭代计算,通过角点定位对分割结果进行修正,在保证精度的前提下,使用两点拟合直线代替了最小二乘法。
首先,使用激光雷达获得的扫描点对应矢径长度和角度,计算相邻点的斜率差,对点集进行初始分割。
然后,计算分割后每部分点集对应线段的斜率,对过分割的点集进行合并。
最后,通过计算相邻两直线的交点对角点特征进行定位和提取。
通过实验验证,该算法能够准确地提取出数据帧中的角点特征,并且具有较好的位置精度和计算效率。
关键词:自主机器人;特征提取;角点;激光雷达;即时定位与构图中图分类号:TP242文献标志码:A文章编号:1005⁃2615(2021)03⁃0366⁃07Method for Extracting Corner Feature from2D Laser SLAMLIU Peng,REN Gongchang,HE Zhou(College of Mechanical and Electrical Engineering,Shaanxi University of Science and Technology,Xi’an710021,China)Abstract:In localization problems of autonomous robots,if accurate environmental features can be extracted from the scanning data of laser radar,the matching speed in simultaneous localization and mapping(SLAM)will be greatly improved.At present,most approaches for feature extraction adopt the iteration strategy,which have high computational complexity.To overcome these drawbacks,a new algorithm is proposed to extract corner feature.In the method,iteration is avoided,and on the premise of ensuring the accuracy,the least square method is replaced by two-point fitting line by positioning the corner points to modify the segmentation result.First,the length and angle of the scanning points obtained from the laser radar are used to calculate the slope difference of the adjacent points for the initial segmentation of the point set.Then,after calculating the slopes of the line segments corresponding to each point set,the point set is merged to solve the over-segmentation problem.Finally,the corner feature is located and extracted by calculating the intersection point of two adjacent lines.Experimental results show that the developed algorithm can extract corner features from the scanning data accurately and has better position accuracy and computational efficiency.Key words:autonomous robot;feature extraction;corner point;laser radar;simultaneous localization and mapping(SLAM)2D激光即时定位与构图(Simultaneous local⁃ization and mapping,SLAM)技术由于其相对简单,发展时间长,技术较为成熟,目前被广泛应用于物流配送、家庭服务等类型的自主移动机器人中。
光流法 特征点提取

光流法特征点提取
光流法(optical flow)是一种用于计算图像序列中像素运动的计算机视觉技术。
它假设相邻两帧图像中的像素之间存在连续性,并使用局部亮度变化来计算像素之间的运动。
在光流法中,特征点提取是一个很重要的步骤。
特征点通常是指图像中具有唯一性和重要性的像素,例如角点、边缘等。
它们可以用于跟踪和匹配图像。
常用的特征点提取算法包括:
1. Harris角点检测算法:该算法通过计算图像中像素灰度值的梯度和协方差矩阵来检测图像中的角点。
2. Shi-Tomasi角点检测算法:该算法与Harris角点检测算法类似,但它使用图像梯度的最小特征值来检测角点。
3. FAST(Features from Accelerated Segment Test)算法:该算法使用像素周围的强度值差异来检测图像中的关键点,其速度比其他算法更快。
4. SURF(Speeded-Up Robust Features)算法:该算法通过检测图像中的局部极值来定位关键点,并使用特征描述子来区分关键点。
特征点提取的选择通常取决于图像的性质和应用领域的需求。
在光流法中,选择具有高精度和稳定性的特征点非常重要。
激光扫描仪数据处理与地形模型生成的方法

激光扫描仪数据处理与地形模型生成的方法激光扫描技术是一种基于激光雷达原理的高精度三维测量技术,广泛应用于地形测量、建筑检测、环境监测等领域。
激光扫描仪通过发射激光束并接收反射回来的信号,可以获取地表特征点的三维坐标和反射强度。
然而,激光扫描仪原始数据的处理与地形模型的生成并不是一件简单的事情。
本文将介绍激光扫描仪数据处理与地形模型生成的方法。
首先,激光扫描仪数据的处理包括去噪、点云配准和特征提取等步骤。
去噪是因为激光扫描仪在工作过程中会受到噪声的干扰,所以对原始数据进行滤波处理是必不可少的。
常用的去噪方法有高斯滤波、中值滤波和双边滤波等。
点云配准是指将多次扫描得到的点云数据进行对齐,从而得到一个完整的三维地形模型。
点云配准方法有ICP(Iterative Closest Point)算法、特征匹配算法等。
特征提取是指从点云数据中提取出具有代表性的特征点,用于后续地形分析和模型生成。
常用的特征提取方法有SIFT(Scale-Invariant Feature Transform)算法、Harris角点检测算法等。
接下来是地形模型的生成。
根据应用需求可以选择不同的地形模型生成方法。
常见的地形模型包括数字高程模型(Digital Elevation Model,DEM)和数字地表模型(Digital Surface Model,DSM)。
DEM是根据地面特征点得到的地表高度模型,反映了地物的海拔高度分布情况。
DSM是根据地表和地物特征点得到的地表高度模型,反映了地物的真实分布情况。
地形模型生成的方法主要有插值法、曲面拟合法和三角剖分法等。
插值法是根据不同的插值算法,根据已有的地面特征点,计算出其他地点的高度值。
常见的插值算法有Kriging插值算法和反距离权重插值算法等。
曲面拟合法是根据已有的地面特征点,通过曲面拟合算法,得到一个光滑的地形曲面。
三角剖分法是将地面特征点连接成三角形网格,得到一个精确的地形模型。
使用激光扫描仪进行高精度测绘的步骤
使用激光扫描仪进行高精度测绘的步骤激光技术的应用正在不断拓展,其中之一就是在地理测量领域中的使用。
使用激光扫描仪进行高精度测绘已经成为现代测绘领域中一项重要的技术手段。
本文将探讨使用激光扫描仪进行高精度测绘的一般步骤。
1. 选取合适的设备和仪器在进行高精度测绘之前,首先需要选择一台高质量的激光扫描仪。
它应该具有高分辨率、高速度和高精度,以产生准确的测绘数据。
此外,还需要选择合适的三维定位系统和其他测量仪器,以辅助激光扫描仪的工作。
2. 准备测绘区域在开始测绘之前,需要对待测区域进行准备工作。
这包括清除障碍物、准确定位控制点和设置扫描站。
控制点是一些已知坐标的固定点,用于校正测绘数据。
扫描站是扫描仪放置和扫描的位置,通常需要选择一些代表性的站点。
这些准备工作对于获得准确的测绘数据至关重要。
3. 进行扫描当准备工作完成后,可以开始进行扫描。
将激光扫描仪设置在一个扫描站上,启动设备,并按照预定的扫描路径进行扫描。
激光扫描仪会发出激光束并记录返回的反射信号。
通过扫描仪自动旋转和移动,可以获得整个测绘区域的点云数据。
这个过程需要时间和耐心,因为扫描仪需要在不同的角度和位置进行多次扫描,以获取全方位的数据。
4. 处理扫描数据一旦扫描完成,就需要对获得的点云数据进行处理。
首先,需要对原始数据进行滤波和去噪,以消除不必要的噪声和干扰。
然后,在点云数据中提取出特征点和关键点,以便进行后续的数据处理和分析。
这些特征点可以是建筑物的角点、地形的起伏点等。
5. 地物提取与建模接下来,利用处理后的点云数据,可以进行地物提取与建模。
通过使用自动或手动的方法,可以将点云数据中的地物识别和分类。
然后,可以进一步对地物进行三维建模,以生成几何模型和纹理信息。
这些模型将提供详细的地物信息和形状,有助于后续的计算和分析。
6. 精度评估在完成地物提取和建模后,需要对测绘结果的精度进行评估。
这可以通过与现有的地理信息进行对比,或者使用控制点进行验证。
使用激光扫描和点云处理进行建筑物立面测绘的技巧
使用激光扫描和点云处理进行建筑物立面测绘的技巧建筑物立面测绘一直是建筑行业中非常重要的工作之一。
近年来,随着激光扫描和点云处理技术的快速发展,这项工作变得更加高效准确。
本文将重点介绍如何利用激光扫描和点云处理技术进行建筑物立面测绘,并分享一些相关技巧和经验。
激光扫描技术通过激光雷达仪器对建筑物进行扫描,获取大量点云数据。
这些点云数据可以精确记录建筑物的细节和形状,包括墙面、窗户、门等。
点云处理技术则是对这些点云数据进行分析和处理,生成建筑立面的模型和图像。
首先,在进行激光扫描前,需要对建筑物进行准备。
清理建筑物周围的障碍物和杂物,确保激光扫描仪器能够顺利扫描整个建筑物。
在扫描过程中,操作人员需要按照扫描仪器的要求,保持仪器的稳定并进行合理的扫描路径规划。
这样可以得到更准确的点云数据。
得到点云数据后,接下来就是进行点云处理。
点云数据的处理一般包括数据清洗、配准和特征提取三个主要步骤。
数据清洗是指去除无效或者重复的点云数据,提高数据的质量。
配准则是将不同扫描位置的点云数据进行对齐,形成一个整体点云模型。
特征提取则是从点云数据中提取出建筑物的特征,如边缘、角点等。
在点云处理过程中,有一些技巧可以帮助提高测绘的准确性和效率。
首先,选择合适的配准算法非常重要。
根据具体情况,可以选择ICP(Iterative Closest Point)算法或者特征点匹配算法等。
其次,在进行数据清洗时,要注意去除其他非建筑物物体(如树木、车辆等)的点云数据,以免干扰建筑物立面的测绘结果。
此外,在特征提取过程中,要根据需要选择合适的特征提取算法或者工具,以获得更详细的建筑物特征信息。
完成点云处理后,就可以生成建筑物立面的模型和图像了。
根据点云数据,可以利用三维建模软件生成建筑物的三维模型。
同时,可以将点云数据投影到平面上,生成建筑物的二维图像。
这些模型和图像可以方便后续的分析和设计工作。
值得注意的是,激光扫描和点云处理技术虽然高效准确,但也存在一些挑战和限制。
用 orbextractor 角点提取的例子
用orbextractor 角点提取的例子ORB(Oriented FAST and Rotated BRIEF)是一种用于特征点提取和匹配的算法,ORBextractor是ORB算法中用于提取特征点的模块。
ORBextractor基于FAST特征点检测器和BRIEF特征描述子,可以高效地提取图像中的角点特征。
以下是使用ORBextractor提取角点特征的Python示例代码:```import cv2from ORBextractor import ORBextractor# 读取图像img = cv2.imread('test.jpg')# 创建ORBextractor对象orb = ORBextractor(nfeatures=1000, scaleFactor=1.2, nlevels=8, edgeThreshold=31, firstLevel=0, WTA_K=2)# 提取角点特征kp, des = orb(img, None)# 绘制角点img = cv2.drawKeypoints(img, kp, None, color=(0, 0, 255), flags=0)# 显示图像cv2.imshow('ORB keypoints', img)cv2.waitKey(0)cv2.destroyAllWindows()```以上代码中,首先读取了一个测试图像。
然后创建了一个ORBextractor 对象,设置了一些参数,如特征点数量、尺度因子、金字塔层数等。
最后调用ORBextractor对象的方法提取角点特征,并将提取到的角点绘制到图像上展示出来。
需要注意的是,在实际应用中,ORBextractor的参数需要根据具体的应用场景和要求进行调整,以提取出最符合实际需求的特征。
角点检测的几种基本方法

角点检测的几种基本方法角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三维建模和目标识别等领域中。
也称为特征点检测。
角点通常被定义为两条边的交点,更严格的说,角点的局部邻域应该具有两个不同区域的不同方向的边界。
而实际应用中,大多数所谓的角点检测方法检测的是拥有特定特征的图像点,而不仅仅是“角点”。
这些特征点在图像中有具体的坐标,并具有某些数学特征,如局部最大或最小灰度、某些梯度特征等。
现有的角点检测算法并不是都十分的鲁棒。
很多方法都要求有大量的训练集和冗余数据来防止或减少错误特征的出现。
角点检测方法的一个很重要的评价标准是其对多幅图像中相同或相似特征的检测能力,并且能够应对光照变化、图像旋转等图像变化。
Moravec角点检测算法Moravec角点检测算法是最早的角点检测算法之一。
该算法将角点定义为具有低“自相关性”的点。
算法会检测图像的每一个像素,将像素周边的一个邻域作为一个patch,并检测这个patch和周围其他patch的相关性。
这种相关性通过两个patch间的平方差之和(SSD)来衡量,SSD值越小则相似性越高。
如果像素位于平滑图像区域内,周围的patch都会非常相似。
如果像素在边缘上,则周围的patch在与边缘正交的方向上会有很大差异,在与边缘平行的方向上则较为相似。
而如果像素是各个方向上都有变化的特征点,则周围所有的patch都不会很相似。
Moravec会计算每个像素patch和周围patch的SSD最小值作为强度值,取局部强度最大的点作为特征点。
Harris角点检测算法Moravec角点检测算法有几个很明显的缺陷:1,强度值的计算并不是各向同性的,只有离散的8个45度角方向被考虑。
因为patch的评议比较最多只有8个方向;2,由于窗口是方形并且二元的,因此相应函数会有噪声;3,对边缘的相应太简单,因为强度值尽取SSD的最小值;FAST角点检测算法Smith 和 Brady在1997年提出了一种完全不同的角点提取方法,即“SUSAN (Smallest UnivalueSegment AssimilatingNucleus)”提取算子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以此类推 , 到该 组 激光雷 达数 据 中的所有 点都满 直 足 阈值条 件 。 由于这 种递增 式 的直线 提取方 法是 与
方 向有关 的 , 即对 于 一组 雷 达 数据 , 数据 的起 点 从 和终点 分别 提取直 线可 能会得 到不 同 的结果 , 因此 在完 成上 述过 程 之后 还 需要 对 该 组数 据从 反方 向
然 后将 其感 知 的环 境 信 息与 其 内部事 先 存储 的环 境地 图进 行 匹配口 。 ] 通过 实时 感知 的环境 信息 与地 图 的 匹配 , 机器 人校 正 由里程计 的滑移所 带来 的定 位误 差 , 而更 新 自身 的位姿 。 从 在未 知环 境 中 , 机器 人定 位 问题转 化为 同 时定 位 与地 图构建 问题 [ 。 2 同 ] 时定 位与 地 图构建 的难 点在 于 : 精确 的地 图估 计依
c l ai n a i t .Th t o n l d s c r e e t r i e ,c r e u c i n c lu a i n,n n ma i u p e — z o e me h d i c u e o n r f a u e f t r o n rf n t a c l to l o o — x ma s p r s
3O 8
南
京
航
空
航
天
大
学
学
报
第4 4卷
某 种形 式 的转换 。 这种 转换 一方面 和机器 人感 知环 境 所 使用 的传感 器类 型有关 , 另一 方面 和所 建立 的
Tre ig L 分 割 方 法 的启 发 , 文 提 出一 种 akn ( T) 本
类 似 的多点在 同一 直线 上 的判 别方法 。
器数 据存 储到 地 图中之前 , 要将传 感器 数据 进行 需
基 金项 目 : 苏 省 科 技 支 撑 计划 (E2 1 1 9资 助项 目。 江 B 008)
收稿 日期 : 0 1 0 — 5 修 订 日期 : 0 10 — 6 2 1 — 52 ; 2 1 — 9 2
通讯作者 : 文华 , , 叶 男 教授 , 士 生 导 师 ,9 5年 出 生 , — i: h e n a .d .n 博 16 E malw y @ ua eu c 。
关键词 : 动机器人 ; 移 定位 ; 特征 提 取 ; 光 雷 达 激 中 图 分 类 号 : P 4 T 22 文献标识码 : A 文 章 编 号 :0 52 1 (0 2 0— 390 1 0— 6 52 1) 30 7 —5
M e h d f r Co ne a u e Ex r c i n f o La e c n Da a t o o r r Fe t r t a to r m s r S a t
par am et . er
Ke r y wo ds:mo l o t bie r bo s;1 c i a i n;f a u e e r c i n;l s r r d r o al to z e t r xt a to a e a a
定位 是 自主移 数定 位 系统所 采用 的基本 方法 可 以
●
用 几何 图元 作为路 标 。几何 图元 可 以是断 点[ 、 1 线 ] 段[甚 至弧 线段 [ 。 9 ] 1 断点与激 光雷达 获得 的数 据 的 ] 不连 续性 有关 。 由于环境 中存在 障碍物 , 激光 雷达 在 测量 方 向上 若遇 到 障 碍物 就会 获 得不 连 续 的测 量数 据 , 而 出现断 点 。断点特征 的缺 点是在 探测 从 距离 较长 时定 位误 差会增 大 。 线段 特征 在室 内环境 中大量存 在 , 因而也 得到 广泛 的关 注 。线段 特征 同 时 包含 了位 置 、 向和 长度参数 。这 些参数 既可 以 方 显 式地 表示 , 也可 以 隐式 地表示 。线 段特征 的缺 点 是 探测 的不 完整性 , 给特征 的表示 和 匹配带来 一 这 定 的困难 。弧线 段是一 类略 复杂 的特征 , 探测 起来
第4 4卷 第 3 期 21 0 2年 6月
南 京 航 空
航
天
大
学 学 报
Vo . 4 No 3 14 .
to a t c J u n lo n ig U ni e st fA e o u is & Asr n u is o r a fNa j v r iy o r na tc n
J n 02 u .2 1
从 激 光 扫 描 数 据 中提 取 角 点 特 征 的方 法
满增 光 叶 文 华 肖海 宁 钱 晓 明
( 南京 航 空 航 天 大 学 机 电学 院 , 京 , 10 6 南 201)
摘 要 : 出一 种 从 激 光 扫 描 数 据 中提 取 角点 特 征 的方 法 , 提 以满 足 结 构 化 环 境 中移 动 机 器 人 定 位 的 需要 。 方 法分 该 为 角 点 特征 滤 波 、 角点 函数 计 算 、 非极 大值 抑 制 和 角 点 特征 提 取 与 定 位 四 部 分 。 首 先 , 过 角 点 特 征 滤 波 排 除不 通 具 备 角 点 特征 要 素 的 扫描 点 。然 后 , 过 角 点 函数 衡 量余 下 的 扫描 点作 为 角 点特 征 的 程度 。 后 , 用非 极 大值 通 之 采
Asr n u is to a tc ,Na j g,2 0 1 ,Chn ) ni n 106 ia
Ab t a t A e ho s p e e e o xt a tng c r e e t r s f o l s r s a t o o l o tl s r c : m t d i r s nt d f r e r c i o n r f a u e r m a e c n da a f rm bi r bo o— e
也 比较 困难 , 并且 在 室 内环境 下也不 多见 。
图 1 角 点 特 征
其 原理 如 图2所 示 。对 于需要 判别 的第 i 直 条 线 , 所考 察 的一 组 激 光 雷达 数 据 中 , 先 通 过 在 首 拟合 该组 中起始 的两个 点 户 肘和 P +确定 直线 z 的 M 参数 ; 然后计 算点 P + 到该直 线 的距 离 d + 。如果 肘: d + 小于 阈值 M, M 则将 点 P +添 加到直 线 中 , M。 再 通 过拟合 点 户 户 + 和 户 + 重新计 算 的参 数 , M, M 计 算 下一 点 P + 到直 线 的距 离 , 进行 条 件判 断 , M3 再
抑 制 方 法 去 除 局 部 区 域 内非极 大值 对 角 点 特征 提 取 的 干 扰 。 最后 , 过 阈值 法 提 取 出 角点 特 征 并 对 其 进 行 定 位 。 通
实验 结 果表 明 , 方 法 可 以准 确 地 从 激 光 扫 描 数 据 中提 取 出 角 点特 征 , 对 位 置 参 数 具 有 很 好 的 鲁 棒 性 。 该 并
M a n g a g,YeW e h a,X ioH an n n Ze g u n nu a ii g,Qi nX io n a a mig
( ol eo eh nc l n lcr a E gn e ig Na j g Unv r i f r n u i & C l g f c a i dE eti l n ie r , ni i s y o o a t s e M aa c n n e t Ae c
鉴于用 断 点 、 线段 和弧线 段等 特征 表示环 境 的
一
些 缺点 , 本文 提 出一种从激 光雷 达距 离 图像 中探
测 角点 的方法 。在环 境 中 , 所提取 的角 点特 征对应 于 如两 面墙相 交时所 产生 的角类 结构 。 用角 点特征 表 示 环 境 , 以更 好 地 满 足 移 动 机器 人 定 位 的 需 可
son,a d c r e e t e e r c i a d 1 c lz ton. Fis ,t s a i t ou o ne e t r l — i n o n r f a ur xta ton n o a ia i r t he c n po nt wih t c r r f a u e e e me s i xc u e r m l s a o nt y c r r f a ur it r nt s e l d d f o a l c n p i s b o ne e t e fle .Se on c d,c r r f c i s c l u a e o o ne un ton i a c l t d t me s r h x e h t t e r ma n d s a oi s a e c r r f a u e . Thid,n — xi up r s i n a u e t e e t ntt a h e i e c n p nt r o ne e t r s r on ma ma s p e so m e ho S us d t lmi a e d s ur n er s t d f o n n— xi n l a r a i xta tng c r r f a t d i e o ei n t it ba c e ule r m o ma ma i oc la e n e r c i o ne e — t e . Fi a l ur s n ly,c r r e t e a e xt a t d o ne f a ur s r e r c e by t e ho d hr s l me ho a d o aie t d n l c lz d. Ex r me t e u t pe i n r s ls s w ha h t d c n e r c or e e t r c u a e y f o l s rs a t nd i o s o p s to ho t tt e me ho a xt a tc n r f a u e a c r t l r m a e c n da aa S r bu tt o ii n