无人机概述及系统组成66页PPT
无人机概述及系统组成
巡航飞行速度(远航速度,区别于久航速度):发动机每公里消耗 燃油量最小情况下的飞行速度。
(二)高度性能
理论静升限:飞机能作水平直线飞行的最大高度。 实用静升限:飞机最大爬升率等于0.5m/s(亚声速飞机)或5m/s (超声速飞机)时所对应的飞行高度。
按活动半径分类
超近程:15km以内 近程:15-50km之间 短程:50-200km之间 中程:200-800km之间 远程:大于800km。
按任务高度分类
超低空:0-100m 低空:100-1000m 中空:1000-7000m 高空:7000-18000m 超高空:大于18000m
国外无人机的发展
固定翼航空器 旋翼航空器 扑翼机 变模态机
飞机 滑翔机 直升机 旋翼机
固定翼Fixed-wing无人机平台
由动力装置产生前进的推力或拉力,由机体上固定的机翼产生升力,在大气 层内飞行的重于空气的无人航空器。
旋翼Rotary wing无人机平台
旋翼无人机平台是一种重于空气的无人航空器,其在空中飞行的升力由一个 或多个旋翼与空气进行相对运动的反作用获得,与固定翼为相对的关系。
翼梢小翼
干扰阻力
干扰阻力就是飞机各部分之间由于气流相互干扰而产生的一种额 外的阻力。
航空器---飞行性能
速度性能 高度性能 续航性能 机动性能 敏捷性 起飞着陆性能
(一)速度性能
最大平飞速度:飞机水平直线平衡飞行时,在一定飞行距离内(一 般不小于3千米),发动机推力在最大状态下,飞机所能达到的最大飞 行速度。
•摩擦阻力(型阻) •压差阻力(型阻) •诱导阻力 •干扰阻力
影响摩擦阻力的因素
无人机零部件及其功能介绍 ppt课件
显示端 接收天线
显示端:可以配置iPad、安卓机和苹果手机等,或者大疆精灵
4Pro V2.0版本自带的高亮显示屏
ppt课件
11
遥控器
显示器托架
电源键
天线 摇杆
遥控器是用来对无人机飞行动作进行控制的部件,主要包 括电源键、摇杆、天线和几个快捷键
ppt课件
12
无人机分类
飞行器分类 稳定性
固定翼 自稳定
续航时间
长
直升机
不稳定,完整驱 动
多旋翼
不稳定,欠驱 动
中
短
飞行效率 荷载 其他
高
大
起飞助跑,降 落滑行
中
中
可垂直起降, 机械结构复杂
低
小
可垂直起降, 机械结构简单
ppt课件
13
无人机分类
无人机 重量分 类(按 民航法 规)
微型:0kg-7 kg 轻型:7 kg-116 kg 小型:116 kg -5700 kg 重型(大型):5700kg以上
无人机零部件及其功能介绍
总体结构介绍 动力系统 机身系统 机载系统 图传系统 遥控器
无人机分类
多旋翼无人机历史
无人机应用
无人区使用注意 事项
ppt课件
禁飞区
3
总体结构介绍
飞控系统
螺旋桨
图传系统
电机 机架
起落架
电调
相机
云台
智能电池
ppt课件
遥控器
4
动力系统
螺旋桨:无人机产生推力的最主要部件,
四旋翼无人机一般搭配4个螺旋桨,其中两 个正方向,两个反方向
ppt课件
Hale Waihona Puke 5电机:多旋翼无人机的电机多采用无刷直流电动机,
无人机课件
全球鹰
发动机: AE-3007E 推力 7600磅力 (劳斯莱斯)
传感器:光电/红外 合成孔径雷达/移动目标
RQ-4B 总重:14600Kg 有效载荷:1360Kg 续航时间:28h 最大/巡航速度 :630/580Km/h 升限:18000m
第三次浪潮代表机型: 美国的影子200(Shadow)、火力侦察兵(FireScout); 奥地利的坎姆考普特(Camcopter)
基本性能:总重:1020Kg 有效载荷:200Kg 续航时间:>24h/16h (带外挂 ) 最大/巡航速度:220/130Km/h 升限:7600m
发动机: Rotax 914F 功率 115马力 传感器:光电/红外 雷神AN/AAS-52 合成孔径雷达 诺斯罗普· 格鲁门 AN/ZPQ-1 武器:2枚AGM-114
第二次浪潮代表机型: 美国的捕食者(Predator)、全球鹰(Gl0bal Hawk) 、以色列的苍鹭(Heron)、法国的鹰(Eagle)
美国捕食者 美国全球鹰 以色列苍鹭
空军
已交付120架/已计划采购77架
捕食者
背景 1994年的先进概念技术演 示 (ACTD) 项 目 , 1997 年转变为 空军项目。2001年,空军成功演 示 了 该 机 使 用 ‚ 海 尔 法 ‛ (Hellfire) 反坦克导弹的能力, 并因此将其编号由RQ-1改为MQ1。
战场新秀——无人机
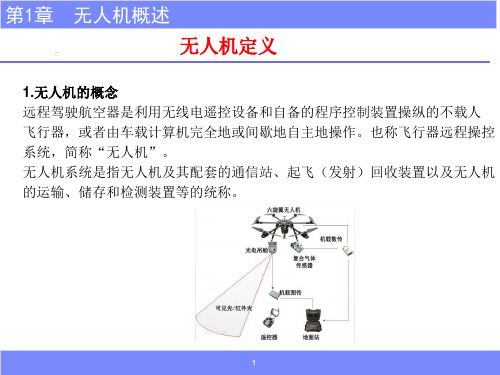
一、无人机的概念 Conception 什么是所谓的无人机
无人机(Unmanned Aerial Vehicle)又叫无人 航空器是指不搭载操作人员的一种动力空中飞 行器,采用空气动力为飞行器提供所需的升力 ,能够自动飞行或远程引导;既能一次性使用 也能进行回收;能够携带致命性和非致命性有 效负载。 无人机与各种导弹等无人武器系统的区别: 1、无人机在飞行结束后可以收回,导弹不能。 2、无人机携带的弹药并不与机身形成一体,而 导弹的弹头整合在弹体内。
无人机发展和系统组成_图文

1982年黎以冲突中,“侦察兵”和“猛犬”更是一同上阵。在与黎巴嫩的作 战中,位于贝卡谷地的叙利亚“萨姆”防空导弹阵地构成了对以色列空军作 战行动的最大威胁。通过使用无人侦察机,以色列空军精确锁定了上述导弹 阵地的位置。随后,以色列向叙利亚防空导弹阵地投放了“萨姆森”无人机 诱饵,诱使叙利亚防空导弹雷达一开机就遭到了以色列反雷达导弹的打击。 这样,叙利亚防空导弹部队就得被迫缩短雷达开机时间,从而为以色列空军 提供了更大的作战空间和机会,在其他侦察/监视无人机的协助下,以色列取 得了战争的全面顺利。这场战争不但充分显示了无人机诱饵的巨大价值,同 时也体现出了实时战场监控的现实作用。
中东战争期间,叙利亚、埃及和黎巴嫩利用“萨姆”-6防空导弹构筑了一个严 密的防空火力网,高度从几十米的低空到上万米高空,使得以色列的飞机一旦 进入,就基本无生还的可能。为了突破对手的防空网,以色列空军对于美军在 越战期间的经验和教训进行了认真的研究,决定开始研制自己的新型无人机。 他们把从美国引进的“石鸡”喷气式无人靶机和“壮士”无人靶机改装成能够 模拟喷气式战斗机进行电子欺骗的无人机,又先后研制了“侦察兵”和“猛犬” 两种无人侦察机用于收集雷达信号和进行光电复合侦察,这两种无人侦察机均 可在前线上空灵活部署,并具有全天候工作能力。这些无人机为以色列夺取战 争的胜利奠定了基础。图中所示为以色列的“猛犬”无人侦察机。
分类 大型(重型)无
人机 中型无人机
轻型飞机重量大于800kg(或500kg),翼展在十几 米以上的无人机。
通常是指飞机重量大约在200kg~800kg(或500kg), 翼展大约在10m以内的无人机。
通常是指飞机重量大约在100~200kg,或只有几十公斤 重的无人机。
在1991年的海湾战争中,美、英、法、加拿大和以色列等国的无人机纷纷亮 相战场,参战的无人机有200多架,无人机已成为 战争中“不可或缺”的战 场能力。其中美军总共有6个“先锋”无人机连参战,分别布置在近海岸、海 军舰艇和海军陆战队,执行了522架次的飞行任务,累计飞行时间达1638小 时,为多国部队了解战场态势及评估空袭效果提供了重要的依据,对干扰、 压制伊拉克防空体系和通信系统发挥了重要作用。。
无人机概述课件PPT
第1章 无人机概述 无人机的应用
3.在航测领域的应用 无人机航测的应用领域覆盖面很广,目前主要在以下几个场景中: (1)国土测绘 (2)环境监测 (3)应急救灾
13
第1章 无人机概述 无人机的应用
4.在电力巡线领域的应用 电力巡线无人机由飞行平台、导航飞控、任务载荷三部分组成,其中巡线 无人机任务载荷主要有高清数码摄像机和照相机、雷达以及GPS定位系统 等。无人机电力巡检如图1-9所示。
15
第1章 无人机概述 民用用无人机的发展趋势
1.智能化 通过提高民用无人机的智能化,可以更好地满足市场需求,降低无人机驾 驶员的使用数量,此外,近些年人工智能技术的发展,为无人机的智能化 奠定技术基础。 2.产业化 随着民用无人机市场的发展,消费者需求更加多样化。 3.规范化 建立民用无人机飞行运营、适航管理、安全管理等较为完善的标准规范和 法规体系,确保无人机的合理、合法、合规地使用。 4.专业化 通过实施“无人机+”计划,细分出无人机应急救援、公共安全、环境保护、 石油巡线等应用领域。
8
第1章 无人机概述 无人机的应用
1.在植保领域的应用 植保无人机由飞行平台、导航飞控、喷洒机构三部分组成。植保无人机 稻田作业如图所示。
9
第1章 无人机概述 无人机的应用
2.在航拍领域的应用 航拍无人机由飞行平台、导航飞控、任务载荷三部分组成,其中航拍无人机 任务载荷只要有云台、相机和图像传输系统等。航拍无人机如图所示。
1
第1章 无人机概述 无人机定义
2.无人机与航模区别 (1)控制系统 无人机具备飞行控制系统,而航模没有飞控。 (2)任务载荷 无人机搭载一定的任务载荷,航模则没有。 (3)飞行平台 无人机飞行平台的外形和形式多样,设计和制造比较先进,而航模则比较 单一,技术水平较低。
无人机概论(第2版)课件:无人机系统组成
无人机系统组成 多旋翼无人机机体结构
2. 机架 (3)碳纤维机架
16
无人机系统组成 多旋翼无人机机体结构
2. 机架 (3)碳纤维机架
17
无人机系统组成 多旋翼无人机机体结构
2. 机架 机架的主要作用 (1)提供安装接口。 (2)提供整体的稳定和坚固的平台。 (3)起落架等缓冲设备。 (4)保证足够低的重量。 (5)提供相应的保护装置。
2.如果按机翼弦平面有无上反角来分,可分为上反翼、无上反翼与下反翼三种类型。
14
无人机系统组成 多旋翼无人机机体结构
1.组成 多旋翼无人机组成一般包括机架起落架、电机和电调、电池、螺旋桨、 飞控系统、遥控装置、GPS模块、任务设备和数据链路。 2. 机架 机架按材质一般可以分为以下几种类型: (1)塑胶机架 主要特点是具有一定的刚度、强度和可弯曲度。 (2)玻璃纤维机架 主要特点是强度比较高,重量轻。 (3)碳纤维机架 其特点是价格要贵一些,但重量要轻一些。
22
无人机系统组成 多旋翼无人机布局
多旋翼按形状分为:十型,X型,H型,Y型,上下布局等等。 1.十字型布局 特点:十型多旋翼是最早出现的一种气动布局,只需改变少量电机转速 就可实现。 2.X型布局 特点:X型多旋翼是目前最常见的,相比于十型多旋翼,前后左右动作时 加减速的电机较多,控制比较迅速和有力。 3.H型布局 特点:其特点在于比较易于设计成水平折叠结构,看起来比X型厚重,又 拥有与X型相当的特点,结构简单,方便控制。
32
无人机系统组成 燃气涡轮发动机
2.涡轮喷气发动机 “涡喷”发动机是利用核心机出口燃气的可用能量,在发动机尾喷管中转变 成燃气的动能,以很高速度从喷口排出而产生推动力的一种涡轮发动机。 涡喷发动机转速高、推力大、直径小,主要适用于超音速飞行,缺点是耗油 率大,特别是低转速时更大,故经济性差。此外,由于排气速度大,噪声也 大。
无人机结构与系统组成 PPT
飞控
接收机
螺旋桨
• 电调输入端的红线、黑线需并联接到电池的正负极上,其输出端的3根黑线连接到电动机;其BEC 信号输出线,用于输出5V电压给飞控供电和接收飞控的控制信号;遥控接收机连接在飞控上,输 出遥控信号,并同时从飞控上得到5V供电。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电动机
直流电动机是目前无人机使用最多、应用最广的动力装置。
➢ 不能通过KV比较电机的好坏,不能说KV380的比KV600的好。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电池
作用:为电动机的运转提供电 能。
镍氢电池
镍铬电池
锂聚合物电池
重量重、能量密度低,渐被淘汰
能量高、小型化、轻量化,主流
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电池
电池三要素:正极、负极、电解质
需要注意的,此尺寸是指定子的,不是指电机外型尺寸,电机壳的厚度、散热糟形、底座高度等都 影响电机外型尺寸,所以用定子尺寸做功率的判断比用外型尺寸要标准和靠谱。
休息10分钟, 大家把每日健康数据填报一下。 10:05继续。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电动机 无刷电机的性能指标之二:
➢ 机翼 ➢ 机身 ➢ 尾翼 ➢ 起落装置 ➢ 动力装置
1.1 无人机的基本结构 1.1.2 多旋翼无人机的基本结构
1.1 无人机的基本结构
1.1.3 无人直升机的基本结构
➢ 机身 ➢ 主旋翼 ➢ 尾桨 ➢ 操纵系统 ➢ 传动系统 ➢ 电动机或发动机 ➢ 起落架
1.2 无人机动力系统
无人机动力系统
相同点:2212、2205、2213 1000KV、2300KV、920KV
无人机概述及系统组成

无人机概述及系统组成无人机(UAV)的定义无人机驾驶航空器(UA:Unmanned Aircraft),是一架由遥控站管理(包括远程操纵或自主飞行)、不搭载操作人员的一种动力空中飞行器,采用空气动力为飞行器提供所需的升力,能够自动飞行或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载。
以下简称无人机。
无人机系统的定义及组成无人机系统(UAS:Unmanned Aircraft System),也称无人驾驶航空器系统(RPAS:Remotely Piloted Aircraft System),是指一架无人机、相关的遥控站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统,无人机系统包括地面系统、飞机系统、任务载荷和无人机使用保障人员。
无人机系统驾驶员的定义无人机系统驾驶员,由运营人指派对无人机的运行负有必不可少职责并在飞行期间适时操纵飞行控制的人。
无人机系统的机长,是指在系统运行时间内负责整个无人机系统运行和安全的驾驶员。
无人机和航模的区别一、定义不同无人机是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器。
航空模型是一种重于空气的,有尺寸限制的,带有或不带有动力装置的,不能载人的航空器,就叫航空模型。
二、飞行方式不同唯一的区别在于是否有导航飞控系统,能否实现自主飞行。
通俗来说,无人机可以实现自主飞行,而航模不可以,必须由人来通过遥控器控制。
也就是无人机的本身是带了“大脑”飞行,可能“大脑”受限于人工智能,没有人脑灵光。
但是航模的“大脑”始终是在地面,在操纵人员的手上。
三、用途不同无人机更偏向于军事用途或民用特种用途,而航空模型更接近于玩具。
昆明劲鹰无人机专业从事航测无人机设备的设计、生产、销售、及航测航拍服务,费用低、技术强、工期短、精度高,是中国技术顶尖的航测航拍无人机设计制造及航飞服务商。
四、组成不同无人机比航模要复杂。
航空模型由飞行平台、动力系统、视距内遥控系统组成。
无人机概述PPT幻灯片课件
民用无人机
民用无人机可分为巡查\监视无人机、农用无人 机、气象无人机、勘探无人机以及测绘无人机 等。
2021/8/19
课堂思考
燃爆8月的电影《战狼2》同学们都去看了吗? 回忆下《战狼2》里的无人机用途是什么?
《战狼2》人脸识别无人机“大出风头”
Little tips
从空中武器的“展示”来看,影片中最精彩的就是雇佣兵利用基于人脸识别的无人机手控追踪、射击影片主角一 行,并一度给他们造成了很多麻烦。
试讲课程
无人机概述
试讲人:XXX
课程预热:
小讨论 聊一聊你所了解的无人机
课程导入: 问题思考——无人机是什么样的?除了航拍外无人机还能做什么?
90后小伙拍出“最潮南京宣传片”立刻爆红网络 这不是纽约、也不是曼哈顿,这是我们每天生活的城市——南京。 昨天傍晚,南京市委宣传部官方微信“南京发布”独家首映了一部 大片《The Best of NanKing》,大片里南京三四十个地标,在镜头 展示下超级震撼….
课堂互动 请同学通过连连看的方式试着判断以下图片对应的无人机类型>>
2021/8/19
固定翼无人机 伞翼无人机 旋翼无人机 无人飞艇 扑翼无人机 多旋翼无人机
其他分类方式:
按照尺度分类
微、轻、小、大。 空机质量 7 (100 千米/小时、3000 米) 116 5700
按活动半径分类
超近程:15km以内 近程:15-50km之间 短程:50-200km之间 中程:200-800km之间 远程:大于800km。
2021/8/19
控制站
四类硬件: 数据链路控制、飞行控制、载荷控制、载荷数据处理等四类硬件设备机柜或机箱构成。
三类不同功能控制站模块: 指挥处理中心:制定任务、完成载荷数据的处理和应用,一般都是通过无人机控制站等间接
无人机操控技术ppt课件第1章无人机概述
1. 3.3 垂直起降固定翼
垂直起降固定翼无人机是近三年新研发出来的一款无人机机型,单纯从结构上看可以看做是多旋翼和固定翼的结合体,它既有多旋翼起降简单、没有场地要求的优点,又有固定翼长航时、大载重的优点,很适合做行业的测绘、监测、管路巡查等工作。
目录
01 认识无人机
02 国家对无人机在高
校发展的政策支持
1 . 2 无人机系统
1 .3 无人机分类
按照不同的平台,无人机包括固定翼、旋翼机、垂直起降固定翼、无人飞艇等。根据飞行场地和任 务需求,选用不同种类的无人机进行作业。
1. 3. 1 固定翼
固定翼无人机就是指飞机的机翼固定不动,靠机翼的空气动力特性而产生升力的一种机型。
1. 3. 2 旋翼机
旋翼机是指通过飞机机翼(桨叶)旋转而产生升力的一种机型,主要包含多旋翼、直升机、自转旋翼机。
1 .1 无人机
无人机系统,也称无人驾驶航空器系统,是指由无人机、相关的遥控站、所需的指挥与管制链路以及批准的型号设计规定的任何其他部件组成的系统。简称:UAS(Unmanned Aircraft System)。
1 . 2 无人机系统
无人机与航空模型区别:
1 . 2 无人机系统
无人机
航空模型
无人机与航空模型区别:
《中国制造2025》推进无人机产业化快速发展
我国有229所高等职业学校设立专业代码为560610的无人机应用技术专业无人机发展前景系统未来将是航空业最蓬勃发展的部分
2 国家对无人机在高校发展的政策支持
第一章 无人机概述
无人机操控技术
无人机应用技术专业规划教1 材
目录
01 认识无人机
02 国家对无人机在高
校发展的政策支持
无人机PPT
信、无线电通信、Wi-
Fi通信等
03
通信协议:无人机与地
面站之间的通信协议,
如Mavlink协议
04
通信距离:无人机通信
距离的限制因素,如信
号干扰、地形遮挡等
演讲人
目录
01. 无人机概述 02. 无人机技术 03. 无人机市场 04. 无人机应用案例
无人机定义
无人机:无人驾驶飞行器, 简称UAV
应用领域:军事、民用、科 研等
特点:自主飞行、远程控 制、高度智能化
发展历程:从军事领域向民 用领域拓展,技术不断进步
发展历程
1
20世纪初:无人 机概念提出
02
视觉传感器: 用于检测和识 别周围环境, 实现自主导航 和避障
03
惯性传感器: 用于测量无人 机的姿态、速 度和加速度, 实现稳定控制
04
GPS传感器: 用于提供无人 机的位置信息, 实现精确导航 和定位
通信技术
01
无人机通信技术:实现
无人机与地面站之间的
数据传输和通信
02
通信方式:包括卫星通
04
影视领域:航拍、 摄影、制作电影
飞行控制系统
功能:实现无人 机的自主飞行、 导航和任务执行
应用:广泛应用 于军事、民用、
科研等领域
01
02
03
04
组成部分:传感 器、控制器、执
行器等
技术:包括姿态 控制、导航控制、
任务控制等
传感器技术
01
传感器类型: 包括视觉传感 器、惯性传感 器、GPS传感 器等
2
20世纪50年代: 无人机开始应用
于军事领域
3
20世纪80年代: 无人机技术逐渐 成熟,开始应用
无人机系统设计课件

功能:实现无人机精确的定 位、导航和遥控,确保无人 机安全飞行和任务完成。
GPS导航传感器 惯性测量单元(IMU) 气压计 超声波传感器
控制算法:用于无人机导航和控制的算法,包括惯性导航、GPS导航、图像识别等。
稳定性分析:分析无人机的飞行稳定性,确保无人机在飞行过程中不会发生失控或偏离航 向。
任务
载荷接口标准 化:为了方便 不同载荷设备 与无人机平台 之间的兼容性, 需要制定载荷 接口的标准化
规范
载荷设备校准: 对于需要进行 精确测量的载 荷设备,需要 进行设备校准 以确保测量数 据的准确性和
可靠性
数据处理:对任务载荷获取的数据进行预处理、分析和处理,提取有用信息。 传输协议:选择合适的传输协议,将任务载荷数据传输到地面控制站或其他无人机系统。 选择考虑因素:传输速度、稳定性、可靠性、安全性等。 常用协议:TCP/IP、UDP、RTCP等。
测试内容:飞行控制、导航定位、图像传输等各项指标的测试结果
评估方法:采用定量和定性评估方法,分析测试数据,评估系统的性能和可靠性
改进措施:根据评估结果,提出改进方案,包括硬件升级、软件优化等方面,提高无人机的性 能和可靠性。
感谢您的观看
汇报人:
考虑因素:载荷能力、续航时间、 尺寸大小、重量等
结构:采用模块 化设计,方便维 修和更换部件
材料:考虑重量、 强度、耐用性、 稳定性等因素, 常选用铝合金、 碳纤维等材料
载荷设计:根据任务需求,选择合适的载荷设备 接口设计:实现载荷设备与无人机平台的连接与通信 考虑因素:重量、尺寸、功耗等 优化设计:提高无人机系统的整体性能和可靠性
测试结果分析: 对测试结果进行 分析并得出结论
无人机通信系统
组成:无人机通信系统由发射机、接收机、天线和其他辅助设备组成 协议选择:通信协议是无人机通信系统的核心,不同的协议适用于不同的应用场景和需求 通 信 协 议 的 种 类 : 包 括 TC P/ I P 、 U D P 、 H T T P 等 协 议 , 根 据 实 际 需 要 选 择 合 适 的 协 议 通信协议的选择因素:需要考虑传输速度、稳定性、安全性等因素,根据实际情况进行选择
无人机概述及系统组成

无人机概述及系统组成之巴公井开创作无人机(UAV)的定义无人机驾驶航空器(UA:Unmanned Aircraft),是一架由遥控站管理(包含远程把持或自主飞行)、不搭载操纵人员的一种动力空中飞行器,采取空气动力为飞行器提供所需的升力,能够自动飞行或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载。
以下简称无人机。
无人机系统的定义及组成无人机系统(UAS:Unmanned Aircraft System),也称无人驾驶航空器系统(RPAS:Remotely Piloted Aircraft System),是指一架无人机、相关的遥控站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统,无人机系统包含地面系统、飞机系统、任务载荷和无人机使用包管人员。
无人机系统驾驶员的定义无人机系统驾驶员,由运营人指派对无人机的运行负有必不成少职责并在飞行期间适时把持飞行控制的人。
无人机系统的机长,是指在系统运行时间内负责整个无人机系统运行和平安的驾驶员。
无人机和航模的区别一、定义分歧无人机是一种由无线电遥控设备或自身程序控制装置把持的无人驾驶飞行器。
航空模型是一种重于空气的,有尺寸限制的,带有或不带有动力装置的,不克不及载人的航空器,就叫航空模型。
二、飞行方式分歧唯一的区别在于是否有导航飞控系统,能否实现自主飞行。
通俗来说,无人机可以实现自主飞行,而航模不成以,必须由人来通过遥控器控制。
也就是无人机的自己是带了“大脑”飞行,可能“大脑”受限于人工智能,没有人脑灵光。
但是航模的“大脑”始终是在地面,在把持人员的手上。
三、用途分歧无人机更偏向于军事用途或民用特种用途,而航空模型更接近于玩具。
昆明劲鹰无人机专业从事航测无人机设备的设计、生产、销售、及航测航拍服务,费用低、技术强、工期短、精度高,是中国技术顶尖的航测航拍无人机设计制造及航飞服务商。
四、组成分歧无人机比航模要复杂。
无人机系统结构与设计课件:无人机系统的机体结构

无人机机体功能
固定翼航空器平台
无人机机体功能
固定翼航空器平台
无人机机体功能
固定翼航空器平台
无人机机体功能
固定翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
无人机机体功能
旋翼航空器平台
§3 无人机机体材料
无人机机体材料
无人机机体材料
塑胶模具注
无人机机体材料
纤板材CNC切割组装
无人机机体材料 碳纤板材CNC切割组装
无人机机体材料 碳纤板材CNC切割组装
无人机机体材料
复合材料模具
无人机机体材料
复合材料模具
无人机机体材料
新兴技术
目录/CONTENTS
§1 无人机系统的组成 §2 无人机机体功能 §3 无人机机体材料
§1 无人机系统的组成
无人机系统的组成
无人机
无人机系统的组成
无人机
§2 无人机机体功能
无人机机体功能
固定翼航空器平台
无人机机体功能
固定翼航空器平台
无人机机体功能
固定翼航空器平台
无人机机体功能
固定翼航空器平台
无人机概述及系统组成
无人机概述及系统组成之樊仲川亿创作无人机(UAV)的定义无人机驾驶航空器(UA:Unmanned Aircraft),是一架由遥控站办理(包含远程把持或自主遨游飞翔)、不搭载操纵人员的一种动力空中遨游飞翔器,采取空气动力为遨游飞翔器提供所需的升力,能够自动遨游飞翔或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载.以下简称无人机.无人机系统的定义及组成无人机系统(UAS:Unmanned Aircraft System),也称无人驾驶航空器系统(RPAS:Remotely Piloted Aircraft System),是指一架无人机、相关的遥控站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统,无人机系统包含地面系统、飞机系统、任务载荷和无人机使用包管人员.无人机系统驾驶员的定义无人机系统驾驶员,由运营人指派对无人机的运行负有必不成少职责并在遨游飞翔期间适时把持遨游飞翔控制的人.无人机系统的机长,是指在系统运行时间内担任整个无人机系统运行和平安的驾驶员.无人机和航模的区别一、定义不合无人机是一种由无线电遥控设备或自身程序控制装置把持的无人驾驶遨游飞翔器.航空模型是一种重于空气的,有尺寸限制的,带有或不带有动力装置的,不克不及载人的航空器,就叫航空模型. 二、遨游飞翔方法不合唯一的区别在于是否有导航飞控系统,能否实现自主遨游飞翔.通俗来说,无人机可以实现自主遨游飞翔,而航模不成以,必须由人来通过遥控器控制.也就是无人机的自己是带了“大脑”遨游飞翔,可能“大脑”受限于人工智能,没有人脑灵光.但是航模的“大脑”始终是在地面,在把持人员的手上. 三、用途不合无人机更偏向于军事用途或民用特种用途,而航空模型更接近于玩具.昆明劲鹰无人机专业从事航测无人机设备的设计、生产、销售、及航测航拍办事,用度低、技术强、工期短、精度高,是中国技术顶尖的航测航拍无人机设计制造及航飞办事商. 四、组成不合无人机比航模要庞杂.航空模型由遨游飞翔平台、动力系统、视距内遥控系统组成.主要是为了大众的不雅赏性,追求的是外表的像真或是遨游飞翔优雅等,科技含量其实不高.无人机系统由遨游飞翔平台、动力系统、飞控导航系统、链路系统、任务系统、地面站等组成.主要是为了完成特定任务,追求的是系统的任务完成能力,科技含量高.部分高级的航空模型和低档的无人机在遨游飞翔平台、动力系统部分并没有太大区别. 五、使用不合无人机多执行超视距任务,最大任务半径上万千米.通过机载导航飞控系统自主遨游飞翔.通过链路系统上传控制指令和下传任务信息.航模通常在目视视距规模内遨游飞翔,控制半径小于800米,操纵人员目视飞机,通过手中的遥控发射机把持飞机,机上一般没有任务设备.很多无人机系统也有类似航模的能力,可以在视距内直接遥控操纵. 六、办理不合在我国,航空模型由国家体委下属航空运动办理中心办理.在我国,民用无人机由民航局统一办理,军用无人机由军方统一办理.按平台构型分类按遨游飞翔平台构型分类:无人机可分为固定翼无人机、旋翼无人机、无人飞艇、伞翼无人机、扑翼无人机等.按用途分类军用无人机可分为侦察无人机、诱饵无人机、电子对抗无人机、通信中继无人机、无人战斗机以及靶机等.民用无人机可分为巡查\监视无人机、农用无人机、气象无人机、勘探无人机以及测绘无人机等.按用途分类(民用)按尺度分类(律例)微、轻、小、大.空机质量(kg)7(100千米/小时、3000米)1165700按活动半径分类超近程:5km以内近程:5-50km之间短程:50-200km之间中程:200-800km之间远程:大于800km.按任务高度分类超低空:0-100m低空:100-1000m中空:1000-7000m地面:7000-18000m超地面:大于18000m。
无人机概述及系统组成PPT课件
优质
52
优质
53
控制站---显示系统
地面控制站内的飞行控制席 位、任务设备控制席位、数据链 管理席位都设有相应分系统的显 示装置,因此需综合规划,确定 所显示的内容、方式、范围。
A、飞行参数综合显示
飞行与导航信息、数据链状
态信息、设备状态信息、指
令信息
B、告警视觉:灯光、颜色、文
字;听觉:语音、音调。
优质
22
无人飞艇平台及系留气球
优质
23
各类变模态平台
优质
24
航空器---机翼结构名称
优质
25
航空器---机身结构名称
优质
26
航空器---起落装置
优质
27
优质
28
动力装置---分类
无人机的发动机以及保证发动机正常工作所必需的系 统和附件的总称。
无人机使用的动力装置主要有活塞式发动机、涡喷发 动机、涡扇发动机、涡桨发动机、涡轴发动机、冲压发动 机、火箭发动机、电动机等。目前主流的民用无人机所采 用的动力系统通常为活塞式发动机和电动机两种。
三类不同功能控制站模块: 指挥处理中心:制定任务、完成载荷数据的处理和应
用,一般都是通过无人机控制站等间接地实现对无人机的 控制和数据接收;
无人机控制站:飞行操纵、任务载荷控制、数据链路 控制和通信指挥。
载荷控制站:载荷控制站与无人机控制站的功能类似, 但载荷控制站只能控制无人机的机载任务设备,不能进行 无人机的飞行控制。
无人机概述及系统组成
无人机培训课程一
1
优质
2
无人机的定义
无人驾驶航空器(UA: Unmanned Aircraft), 是一架由遥控站管理(包括远程操纵或自主飞行) 的航空器,也称遥控驾驶航空器(RPA:Remotely Piloted Aircraft),以下简称无人机。
无人机发展和系统组成ppt课件

1.3 无人机的发展
从1917年发明的第一架无人机开始,到今天的无人侦察机、无人战斗机等军 用无人机,以及在航空拍摄、地质地貌测绘、森林防火等方面广泛使用的民 用无人机,无人机的发展已经历了近百年的历史。无人机因其具有无人员伤 亡风险、生存能力强、机动性能好、使用方便、成本低等优点逐渐受到世界 各国的重视,并且在很多领域正逐步替代有人飞行器,承担越来越多的飞行 任务。
23
1.3.1 起步阶段
无人机的发展历史最早可以追溯到1917年,当时英国皇家航空研究院初步将 空气动力学、轻型发动机和无线电三者结合起来,研制出世界上第一架无人 驾驶飞机。同年12月,美国发明家埃尔默·斯佩里(Elmer Sperry)使用他自 己发明的陀螺仪和美国西部电气公司开发的无线电控制系统,成功地完成了 为美国海军研制的“航空鱼雷”的首飞。受这次成功试飞的鼓舞,美国陆军 航空队也采纳了查尔斯·凯特林(Charles Kettering)的方案,研制出了“自 由鹰”式“航空鱼雷”飞机,
13
军用无人机还有其他的分类方式,如果按无人机的杀伤性质分类可分为非杀 伤、软杀伤和硬杀伤几大类,如图1-8所示。前面所述的靶机属于非杀伤类无 人机,诱饵无人机属于软杀伤类无人机,而发辐射无人机则属于硬杀伤类无 人机。
14
2. 民用无人机
在民用领域方面,由于无人机具有成本相对较低、无人员伤亡风险、生存能 力强、机动性能好、使用方便等优势,因此得到了广泛的应用。其主要应用 市场包括:航空拍摄、航空摄影、地质地貌测绘、森林防火、地震调查、核 辐射探测、边境巡逻、应急救灾、农作物估产、农田信息监测、管道巡查、 高压输电线路巡查、野生动物保护、科研实验、海事侦察、鱼情监控、环境 监测、大气取样、增雨、资源勘探、禁毒、反恐、警用侦查巡逻、治安监控、 消防侦查、通信中继、城市规划、数字化城市建设等多个领域。表1-1所示为 民用无人机的分类划分。
无人机零部件及其功能介绍 ppt课件
ppt课件
19
ppt课件
20
全高清图传、4K相机和初级视觉悬 停辅助系统三大核心技术,并增加 如GPS跟随等辅助功能
具备坏境感知、视觉跟随、自主避
障和精确视觉悬停辅助系统等核心
ppt课件 技术
15
无人机应用
航拍 航摄
航测
赛事直播 灾区搜救
工程监测
警察执法
ppt课件
16
ppt课件
17
无人机使用注意事项
1、螺旋桨的安装要检查安装的牢固性,精灵3和精灵4安装方法不同,注 意电机上的颜色和螺旋桨的颜色要对应,否则容易发生桨叶飞出的情况, 非常危险
无人机零部件及其功能介绍
福州毅锋腾智能科技有限公司
ppt课件
1
总体结构介绍 动力系统 机身系统 机载系统 图传系统 遥控器
无人机分类
多旋翼无人机历史
无人机应用
无人区使用注意 事项
ppt课件
禁飞区
3
总体结构介绍
飞控系统
螺旋桨
图传系统
电机 机架
起落架
电调
相机
云台
智能电池
ppt课件
遥控器
4
动力系统
2、电池的安装要确保听见“咔”的声音,检查两次,否则在飞行过程中 会DJIGo中电池会呈红色
3、确保云台卡扣摘除,否则会严重损害相机,飞行完后扣卡扣时,卡扣 与相机之间要保留一定缝隙,否则会对相机造成磨损
4、先开遥控器后开无人机,先关无人机后关遥控器,否则容易导致无 人机的失控
ppt课件
18
禁飞区
无人机 系统按 续航时 间分
短续航,续由时间60 min以内
无人机结构与系统组成 PPT
S7-200 PLC
S7-300 PLC
S7-400 PLC
S7-200 PLC
S7-300 PLC
S7-400 PLC
(1)与CPU312 IFM和CPU313配套的模块只能 安装在一个机架上。 (2)除了电源模块、CPU模块和接口模块外, 一个机架上最多只能再安装8个信号模块或功能 模块。 (3)CPU314/315/315-2DP最多可扩展4个机 架。 (4)IM360/IM361接口模块将S7-300背板总 线从一个机架连接到下一个机架。
需要注意的,此尺寸是指定子的,不是指电机外型尺寸,电机壳的厚度、散热糟形、底座高度等都 影响电机外型尺寸,所以用定子尺寸做功率的判断比用外型尺寸要标准和靠谱。
休息10分钟, 大家把每日健康数据填报一下。 10:05继续。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电动机 无刷电机的性能指标之二:
➢ 电子调速器 电调的连接: 电调的输入线与电池连接; 电调的输出线(无刷三根)与电机连接; 电调的信号线与接收机连接。
电调一般有输出功能(BEC),即在信号线的正负极之间有5V左右的电 压输出,通过信号线为接收机和舵机供电。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电子调速器
电源
电调
电机
锂聚合物电池
正极(+):导电高分子聚合物 负极(-):锂金属或锂碳层间化合物 电解质:固态或胶态高分子电解质
1.2 无人机动力系统 1.2.1 电动动力系统
➢ 电池
优点: 1.没有多余的电解液,因此它更可靠更稳定。 2.采用铝塑包装,内部出现问题可立即通过外包装表现出来,即鼓胀。 3.具备高分子材料所特有的质量轻、弹性好、易成膜等特性,也顺应了化学电源质量