自动控制根轨迹实验(二)
线性系统的根轨迹-自动控制原理实验报告
自动控制原理实验报告实验题目:线性系统的根轨迹班级:学号:姓名:指导老师:实验时间:一、实验目的1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。
2. 利用MATLAB 语句绘制系统的根轨迹。
3. 掌握用根轨迹分析系统性能的图解方法。
4. 掌握系统参数变化对特征根位置的影响。
二、实验内容同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。
2.1绘制下面系统的根轨迹曲线)136)(22()(22++++=s s s s s Ks G程序:G=tf([1],[1 8 27 38 26 0]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) %绘制闭环系统的阶跃响应曲线-12-10-8-6-4-20246-10-8-6-4-20246810Root LocusReal AxisI m a g i n a r y A x i s0204060801001201400.10.20.30.40.50.60.70.80.91Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围:K>28.74252.2绘制下面系统的根轨迹曲线)10)(10012)(1()12()(2+++++=s s s s s K s G 程序:G=tf([1 12],[1 23 242 1220 1000]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) %绘制闭环系统的阶跃响应曲线-60-50-40-30-20-100102030-50-40-30-20-1001020304050Root LocusReal AxisI m a g i n a r y A x i s01234560.0020.0040.0060.0080.010.012Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围: K>1.1202e+032.3绘制下面系统的根轨迹曲线)11.0012.0)(10714.0()105.0()(2++++=s s s s s K s G 程序:G=tf([5 100],[0.08568 1.914 17.14 100 0]); rlocus (G); %绘制系统的根轨迹[k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点r G_c=feedback(G,1); %形成单位负反馈闭环系统step(G_c) %绘制闭环系统的阶跃响应曲线-60-50-40-30-20-10010203040-60-40-200204060Root LocusReal AxisI m a g i n a r y A x i s012345670.10.20.30.40.50.60.70.80.91Step ResponseTime (sec)A m p l i t u d e得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围:K> 7.8321根据实验结果分析根轨迹的绘制规则:⑴绘制根轨迹的相角条件与系统开环根轨迹增益 值的大小无关。
自动控制原理实验报告根轨迹分析法

相关根轨迹知识
根轨迹的概念 根轨迹是开环系统某一参数从零变化到无穷大时, 闭环系 统特征根在 s 平面上变化的轨迹。 增设零、极点对根轨迹的影响 (1)增加开环零点对根轨迹的影响 第一,加入开环零点,改变渐近线的条数和渐近线的倾角; 第二,增加开环零点,相当于增加微分作用,使根轨迹向左 移动或弯曲,从而提高了系统的相对稳定性。系统阻尼增加,过 渡过程时间缩短; 第三,增加的开环零点越接近坐标原点,微分作用越强,系 统的相对稳定性越好。 (2)增加开环极点对根轨迹的影响 第一,加入开环极点,改变渐近线的条数和渐近线的倾角; 第二,增加开环极点,相当于增加积分作用,使根轨迹向右 移动或弯曲,从而降低了系统的相对稳定性。系统阻 尼减小,过渡过程时间加长;
-4-
五、实验过程
第一题 Gc=1:
Gc=s+5:
Gc=(s+2)(s+3):
-5-
Gc=1/(s+5):
第二题 第 一 步 : 在 MATLAB 的 命 令 窗 口 中 键 入 “ num=[1 3];den=[1 2 0];rlocus(num,den)” ,得图如下:
第二步: 第三步:
第三题 第一步:由已知条件 ts(△=2%)≤4s,超调量≤40%得
s ( s 2)
1 。作 s5
确定系统具有最大的超调量时的根轨迹增益,并作时域 仿真验证;(2)确定系统阶跃响应无超调时的根轨迹取值 范围,并作时域仿真验证 3、已知一单位反馈系统的开环传递函数为 ss 0.8试加入一 个串联超前校正控制(其中,|z|<|p|) ,使得闭环系统 的 ts(△=2%)≤4s,超调量≤40%。
-7-
本为图标的切线与 K 的横坐标的交点所得的纵坐标再减去延迟时间。 随后按图慢慢调整数值,一定要有耐心。 第二题中,Step 的属性不能忘改,否则横轴(0,1)处恒为 1。 分母出 S 前的系数必须小于 1(阻尼比小于 1) ,之后改改分子,调整 调整 S 前的系数并保持 S^2 前的系数不变 (因为分子分母都可约分) , 曲线即可得出。
自动控制原理根轨迹法
自动控制原理根轨迹法自动控制原理是现代工程技术中的重要分支,它涉及到机械、电子、计算机等多个领域。
而根轨迹法则是自动控制原理中的一种重要方法,它可以用来分析和设计控制系统,提高系统的稳定性和性能。
本文将从根轨迹法的基本原理、应用场景和优缺点三个方面进行介绍。
一、基本原理根轨迹法是一种基于极点和零点的控制系统分析方法。
在根轨迹图中,系统的极点和零点被表示为一条曲线,称为根轨迹。
根轨迹图可以用来分析系统的稳定性、响应速度和稳态误差等性能指标。
根轨迹法的基本原理是通过改变系统的参数,使得根轨迹图在复平面上移动,从而实现对系统性能的优化。
二、应用场景根轨迹法可以应用于各种控制系统的设计和分析中。
例如,在电机控制系统中,根轨迹法可以用来分析电机的转速响应和负载扰动对系统的影响。
在飞行控制系统中,根轨迹法可以用来设计飞机的自动驾驶系统,提高飞机的稳定性和飞行性能。
在机器人控制系统中,根轨迹法可以用来设计机器人的运动控制系统,实现机器人的精确控制和运动规划。
三、优缺点根轨迹法的优点是可以直观地表示系统的稳定性和性能指标,便于工程师进行控制系统的设计和分析。
此外,根轨迹法还可以用来分析系统的鲁棒性和鲁棒稳定性,提高系统的抗干扰能力和鲁棒性。
但是,根轨迹法也存在一些缺点,例如对于高阶系统,根轨迹法的计算复杂度较高,需要使用计算机进行计算。
此外,根轨迹法也无法处理非线性系统和时变系统,需要使用其他方法进行分析和设计。
总之,根轨迹法是自动控制原理中的一种重要方法,可以用来分析和设计各种控制系统。
在实际工程中,工程师需要根据具体的应用场景和系统要求,选择合适的控制方法和算法,实现对系统的优化和控制。
《自动控制原理》第4章 线性系统的根轨迹法
68
4.5 广义根轨迹
根轨迹部分是个半圆,半径是 k *
证明:根轨迹上一点S满足相角条件
s (s j2) (s j2)
代入s j
( j) ( j( 2)) ( j( 2))
arctan arctan 2 arctan 2
K* G(s)
s(s 2)(s 1)
26
法则五:根轨迹的分离点与分离角
分离点:几条根轨迹在[s]某一点相遇后又分开 的点。
说明有重根
27
实轴上的分离点(常见)
如果根轨迹位于实轴上相邻的两个开环极点之间, 其中一个可以是无限极点,则在这两个极点之间至 少存在一个分离点;
如果根轨迹位于实轴上相邻的两个开环零点之间, 其中一个可以是无限零点,则在这两个零点之间至 少存在一个分离点;
开环极点:
p1 0 p2 0 p3 2 p4 5
(2)实轴上的根轨迹 (3)根轨迹分支数
4
59
G0 ( s)
s2(s
k* 2)(s
5)
(4)渐近线
4条
渐近线与实轴的夹角
a
4
3
4
3
4
4
渐近线与实轴的交点(σa , 0)
4
pi
a
i 1
4
1.75
60
G0 ( s)
s2(s
k* 2)(s
法则二:根轨迹的分支数,对称性和 连续性
• 根轨迹的分支数与开环有限零点数m和有限 极点数n中的大者相等,它们是连续的并且 对称于实轴。
22
法则三:根轨迹的渐近线(n>m)
• 当开环有限零点数m小于有限极点数n时, 有n-m条根轨迹分支沿着与实轴交点 ,
自动控制原理第4章根轨迹法精

m
( zj )
K K*
J 1 n
( pi )
i 1
zj
1
j
(j
1,2,, m);
pi
1 Ti
(i
1,2,, n)
可写出幅值方程与相角方程,即
G(s)H (s) 1
G(s)H(s) 1
开环零点: z1 1.5; z2,3 2 j
(1)实轴(0~1.5)和( 2.5 ~ )有根轨迹。
(2)渐近线n=4 m=3,故只有一条根轨迹趋向无穷远。由实根
轨迹可知 180 。
(3)根轨迹出射角与入射角。
出射角
3
4
p2 ( 2K 1) ( p2 zi ) ( p2 pi )
d= -3.7
s2 4s 1 0
解法2 用公式有
1 1 1
d 1 j 2 d 1 j 2 d 2
解此方程 d1 3.7, d2 0.3
d1在根轨迹上,即为所求的分离点,d2不在根轨迹上舍去。 因为
z1 2, p1,2 1 j 2 n=2,m=1
系统有两条根轨迹,一条消失于零点,另一条趋于负无穷远 在实轴(-2,-∞)区段有根轨迹。 出射角
4.1根轨迹与根轨迹方程
什么是时域分析? 指控制系统在一定的输入下,根据输出量的时
域表达式,分析系统的稳定性、瞬态和稳态性能。
4.1.1 根轨迹 4.1.2 根轨迹方程
4.1.1 根轨迹
[根轨迹定义]:系统开环传递函数增益K(或某一参数)由零到 无穷大变化时,闭环系统特征根在S平面上移动的轨迹。
例:如图所示二阶系统,
自动控制原理(第三版)第4章根轨迹法(2)

p3、p4的连接线上
大连民族学院机电信息工程学院
自动控制原理
规则6
根轨迹的出射角和入射角
入射角 根轨迹进入开环复 数零点处的切线方向与实 轴正方向的夹角
i 1 i 1
d m d n ln (s1 pi ) ln (s1 zi ) ds1 i 1 ds1 i 1
或
m d d ln( s p ) ln(s1 zi ) 1 i ds ds i 1 i 1 1 1
n
即得
G( s) K ( s 1) s( s 4)(s 2 2s 2)
四个开环极点:0、-1+j、-1-j、-4
一个开环零点:-1
渐近线与实轴交点:
a= i 1
n-m=4-1=3
p z
i i 1
n
m
i
nm
(0) (1 j) (1 j) (4) (1) 5 4 1 3
n m
或
(s
i 1
n
1
pi ) K ' ( s1 zi )
i 1
m
m d n ' d ( s p ) K (s1 zi ) 1 i ds1 i 1 ds1 i 1
两式相除
d n d m ( s p ) ( s1 zi ) 1 i ds1 i 1 ds1 i 1 n m (s1 pi ) (s1 zi )
大连民族学院机电信息工程学院
自动控制原理4 根轨迹法的基本概念

K*
K* 8.16
1.1
pi 71.6
例子4-5 P150
解:1) m=1,n=3,
z1=-20,p1=0,p2=p3=-12, 2)实轴上0--12 ,-12--20 必为根轨迹。 3)渐近线。n-m=2 故有2条渐近线.
G(s) K * (s 20) s(s2 24s 144)
m
n
pi ( pl zi ) ( pl pi )
izl zi )
j 1
jl
p2 1800 56.50 190 590 (108.50 900 370 )
790
z2 1800 1530 1990 1210 63.50 1170 900
(2)闭环极点与开环零点、开环极点以及根轨迹增益均有关。 (需专门研究)
j1
(3)
m
K*
(s z j )
m
(zj)
K limsνG(s) H(s) limsν
(4)根轨迹法 s0
s0
sν
j1 nν
(s
pi )
K*
j1 nν
( pi )
根轨迹图
闭环极点
闭环传递函数
性i 1能指标
i 1
3.根轨迹方程
4-2 根轨迹绘制的基本法则
法则1 根轨迹的起点和终点。 法则2 根轨迹的分支数、对称性和连续性。 法则3 根轨迹的渐近线 法则4 实轴上的根轨迹 法则5 根轨迹的分离点和分离角 法则6 根轨迹的起始角与终止角 法则7 根轨迹与虚轴的交点 法则8 根之和
法则一、根轨迹的对称性、分支数和分布性
1.根轨迹连续且对称于实轴。 2. 根轨迹的分支数与开环有限零点数m与有 限个极点数n中的最大者相等。
《自动控制原理》实验指导书2

G(S)H(S)= (2-15)
式中R的单位为KΩ,比较式(2-14)和(2-15)得
T0=1,T1=0.1
T2=0.51,K=510/R(2-16)
系统的特征方程为1+G(S)H(S)=0,由式(2-14)可得到
S(T1S+1)(T2S+1)+K=0
展开得到
T1T2 +(T1+T2) +S+K=0(2-17)
2.CAE98;
3.万用表。
=
其中: =
无阻尼自然频率和阻尼比:
,
1.选定R,C,Rf值,使 ,ξ=0.2;
2.用CAE98的正弦波作为系统的输入信号,即x(t)=XSin t,稳态时其响应为y(t)=Ysin( t+φ);
3.改变输入信号的频率,使角频率 分别等于(或接近等于)0.2,0.4,0.6,0.8,0.9,1.0,1.2,1.4,1.6,2.0,3.0rad/s,稳态时,记录屏幕显示的正弦输入x(t)=XSint和正弦输出响应y(t)=Ysin( t+φ)。记录曲线序号依次记作 ;
2、零极点对控制系统性能的影响
已知传递函数为 ,1) 分别求加入附加零点分别为-2,-1,-0.4时,系统的单位阶跃响应;2) 分别求加入附加极点分别为-1.5,-0.6,-0.4时,系统的单位阶跃响应.
3、稳态误差
已知3个系统的开环传递函数分别为 , , ,请分别计算这3个系统对单位阶跃和单位斜坡信号的响应并计算稳态误差.
二、实验要求:
1、观测不同参数下二阶系统的阶跃响应并测出性能指标:超调量MP,峰值时间tp,调节时间ts。
2、观测增益对典型三阶系统稳定性的影响。
自动控制原理实验报告-西南交通大学课程与资源中心
西南交通大学自动控制原理课程实验报告册
《自动控制原理》课程实验报告(一)
《自动控制原理》课程实验报告(二)
《自动控制原理》课程实验报告(三)
《自动控制原理》课程实验报告(四)
三、思考题
1. 参数在一定范围内取值才能使闭环系统稳定的系统称为条件稳定系统。
对于这类系
统可以通过根轨迹法来确定使系统稳定的参数取值范围,也可以适当调整系统参数或增加校正网络以消除条件稳定性问题。
对于下图所示条件稳定系统:
试问能否通过增加开环零极点消除系统条件稳定性问题,即对于所有根轨迹增益,根轨迹全部位于s左半平面,闭环系统稳定。
《自动控制原理》课程实验报告(五)
《自动控制原理》课程实验报告(六)
《自动控制原理》课程实验报告(七)
《自动控制原理》课程实验报告(八)
《自动控制原理》课程实验报告(九)。
自动控制原理实验02
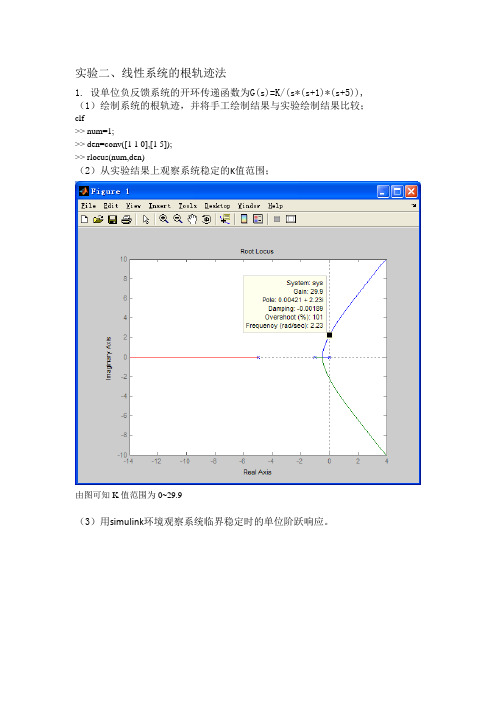
实验二、线性系统的根轨迹法1. 设单位负反馈系统的开环传递函数为G(s)=K/(s*(s+1)*(s+5)), (1)绘制系统的根轨迹,并将手工绘制结果与实验绘制结果比较;clf>> num=1;>> den=conv([1 1 0],[1 5]);>> rlocus(num,den)(2)从实验结果上观察系统稳定的K值范围;由图可知K值范围为0~29.9(3)用simulink环境观察系统临界稳定时的单位阶跃响应。
2.设单位反馈控制系统的开环传递函数为G(s)=K*(s+3)/(s*(s+1)*(s+2));(1)仿照上题绘制系统的根轨迹,并判断系统的稳定性;clf>> num=[1 3];>> den=conv([1 1 0],[1 2]);>> rlocus(num,den)由图知,该系统始终保持稳定.(2)分别取K=5 和K=50,利用simulink环境观察系统的单位阶跃响应,并比实验结果。
K=5时,该系统呈现欠阻尼状态,阻尼系数接近于1。
K=50时,该系统呈现欠阻尼状态,阻尼系数接近于0.3.完成教材第四章习题4-7,4-8,4-10(1)习题4-7,已知开环传递函数为K/(s(s+4)(s^2+4s+20));试概略画出其闭环系统根轨迹图。
clf>> num=1;>> den=conv([1 4 0],[1 4 20]);>> rlocus(num,den)该系统K值范围为0~260时系统稳定。
(2)习题4-8,已知开环传递函数为K(s+2)/((s^2+4s+9)^2);试概略画出其闭环系统根轨迹图。
clf>> num=[1 2];>> den=conv([1 4 9],[1 4 9]);>> rlocus(num,den)该系统K值范围为0~95.6时稳定。
自动控制原理实验报告
自动控制原理实验报告姓 名班 级学 号指导教师1自动控制原理实验报告(一)一.实验目的1.了解掌握各典型环节模拟电路的构成方法、传递函数表达式及输出时域函数表达式。
2.观察分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响。
3.了解掌握典型二阶系统模拟电路的构成方法及Ⅰ型二阶闭环系统的传递函数标准式。
4.研究Ⅰ型二阶闭环系统的结构参数--无阻尼振荡频率ωn 、阻尼比ξ对过渡过程的影响。
5.掌握欠阻尼Ⅰ型二阶闭环系统在阶跃信号输入时的动态性能指标σ%、t p 、t s 的计算。
6.观察和分析Ⅰ型二阶闭环系统在欠阻尼、临界阻尼、过阻尼的瞬态响应曲线,及在阶跃信号输入时的动态性能指标σ%、t p 值,并与理论计算值作比对。
二.实验过程与结果1.观察比例环节的阶跃响应曲线1.1模拟电路图1.2传递函数(s)G(s)()o i U K U s == 10R K R =1.3单位阶跃响应U(t)K 1.4实验结果1.5实验截图2342.观察惯性环节的阶跃响应曲线2.1模拟电路图2.2传递函数(s)G(s)()1o i U KU s TS ==+10R K R =1T R C =2.3单位阶跃响应0(t)K(1e)tTU-=-2.4实验结果2.5 实验截图5673.观察积分环节的阶跃响应曲线3.1模拟电路图3.2传递函数(s)1G(s)()TS o i U U s ==i 0T =R C3.3单位阶跃响应01(t)i U t T =3.4 实验结果3.5 实验截图89104.观察比例积分环节的阶跃响应曲线4.1模拟电路图4.2传递函数0(s)1(s)(1)(s)i i U G K U T S ==+10K R R =1i T R C=4.3单位阶跃响应1 (t)(1)U K tT=+ 4.4实验结果4.5实验截图1112135.观察比例微分环节的阶跃响应曲线5.1模拟电路图5.2传递函数0(s)1(s)()(s)1i U TSG K U S τ+==+12312(R )D R R T CR R =++3R C τ=120R R K R +=141233(R //R )R D K R +=0.06D D T K sτ=⨯=5.3单位阶跃响应0(t)()U KT t Kδ=+5.4实验结果截图6.观察比例积分微分(PID )环节的响应曲线6.1模拟电路图156.2传递函数0(s)(s)(s)p p p d i i K U G K K T S U T S ==++123212(R )C d R R T R R =++i 121(R R )C T =+120p R R K R +=1233(R //R )R D K R +=32R C τ= D D T K τ=⨯6.3单位阶跃响应0(t)()p p D p K U K T t K tTδ=++6.4实验观察结果截图16三.实验心得这个实验,收获最多的一点:就是合作。
自动控制原理第四章2

开、闭环零极点与根轨迹设计
给F(s)增加零点(续)
F(s) =
K
,
s(s + a)(s + b)
C
a > 0, b > a.
z 给F(s)增加零点: s = – c, c > b .
原系统根轨迹的共轭复 根部分向左弯曲
增加零点可以改善系统 的相对稳定程度
12
开、闭环零极点与根轨迹设计
增加开环零点对根轨迹的影响
渐近中心: ? C
有两条复根根轨迹,向右弯曲得更厉害
D
给F(s)增加极点将使根轨迹的 主导部分向右半s平面移动 9
开、闭环零极点与根轨迹设计
给F(s)增加零点
z增加一个实零点:
F (s)
=
K(s + b) ,
s(s + a)
a > 0, b > a.
z增加一对共轭复零点: B
σ
A
原系统根轨迹的共轭复根部分向
F(s)
=
K(s + s2(s +
b) a)
.
图C a = 8.
图D a = 3.
图E
a = b = 1.
极点 s = – a 和 零点 s = – b 相互抵消
分离点式子
s1,2
=
−
a
+ 4
3
± 1 a 2 − 10 a + 9 4
对于 a < 9 无意义
系统退化为二 阶情形,根轨 迹为整个虚轴
17
分离点式子
s1,2
=
−
a
+ 4
3
±
1 4
a2 − 10a + 9
实验2 线性系统的根轨迹分析
自动控制理论实验报告
实验二 线性系统的根轨迹分析
哈尔滨工业大学
实验二 线性系统的根轨迹分析
一、实验目的
1、掌握使用MATLAB绘制控制系统根轨迹图的方法;
2、掌握根据根轨迹法对控制系统进行性能分析方法。
二、 实验设备
Pc机一台,MATLAB软件。
三、实验内容
A、已知一负反馈系统的开环传递函数为
(1)绘制根迹。
(2)选取根轨迹与虚轴的交点,并确定系统稳定的根轨迹增益K的范围 。
(3)确定分离点的超调量 及开环增益K。
(4)用时域相应曲线验证系统稳定的根轨迹增益K的范围
(5)分析根轨迹的一般规律。
B、. 已知系统的开环传递函数为:
求:1)绘制根轨迹。
2)选择系统当阻尼比 =0.7时系统闭环极点的坐标值及增益K值。
分析系统性能。
四、实验结果与分析
A:1、根轨迹
2、由根轨迹图知,与虚轴交点i=4.46,增益K=12,故K<12时系统稳定
3、由根轨迹图知,分离点超调量Mp=0%,增益K=0.458
4、将不同的K带入时域响应,如下图
由图可知当K=11.9时系统依旧稳定,但当K=12时系统已经开始震荡,进入临界稳定。故与根轨迹结论一致。
超调量越靠近虚轴越大,系统处于欠阻尼状态,其动态响应将出现衰减振荡,而且越靠近虚轴,增益K越大,阻尼越小,振荡频率 越高,振幅衰减越大。
5)当根轨迹与虚轴相交时,闭环根位于虚轴上,闭环极点是一对纯虚根,阻尼 ,超调量最大,系统处于无阻尼状态,其动态响应将出现等幅振荡。此时对应的增益 ,称为临界稳定增益。
5、根轨迹的一般规律
1)根轨迹,随着k值从 变化,趋向无穷远处或者零点。
自动控制原理 第四章 根轨迹c2

解(1)无开环零点,4个开环极点
p1 0 , p2 3 , p3,4 1 j
在实轴上根轨迹[-3,0]。
(2)有4条分支趋向无穷远处。渐近线的夹角与交点
a
(2k 1)180o
4
45o
, 135o
a
0 31 4
j 1
j
1.25
15
(3)分离点 方法一:
p1 0 , p2 3 , p3,4 1 j
1 1 1 1 0 可解出d d d 3 d 1 j d 1 j
方法二:
G(s)H (s)
s(s
Kr 3)(s2
2s
2)
D(s) 1 G(s)H (s) 0
s(s 3)(s2 2s 2) Kr s4 5s3 8s2 6s Kr 0
60 180
0 -2
1c 45 2c 45
与虚轴的交点
-4
0 , j4 2 j5.657
-6
计算所得分离会合点,实际并不是分离点
-8
s 2.67 1.89 j
-8 -6 -4 -2 0 2
22
[例]开环传递函数为:
Gk
(s)
s[( s
Kg 4)2
∵ d2不在根轨迹上,略去 分离角:
d 3.414
j
(2k 1) / l , l 2
3
22
2 1
3.414
0
复平面上的根轨迹是圆的一部分,圆心为(-2,j0),
半径为 2
8
规则7:根轨迹与虚轴的交点
方法一:令 s j代入特征方程1+G(s)H(s)=0,解出
自动控制原理第四章根轨迹法

∠S =φa= (2K+1)π/(n-m) 无穷远处闭环极点的方向角,就是渐近线的方向角.
绘制根轨迹的基本法则
开环传递函数的标准形式举例
例:将下面的开环传递函数化成标准形式
10(5S+1)
10*5[S+(1/5)]
25/3(S+1/5)
G(S)H(S)= —————— = ————————— = ———-———
(2S+1)(3S+1) 2*3(S+1/2)(S+1/3) (S+1/2)(S+1/3)
K = 10 ————开环增益
根轨迹举例
由上述根轨迹图可知: 1.当开环增益由0到∞变化时,根轨迹均在S平面的左半部,
因此系统对所有K值都是稳定的。 2.当0<K<0.5时,闭环特征根为实根,系统呈过阻尼状
态,阶跃响应为非周期过程。
根轨迹举例
3.当K=0.5时,闭环特征根为重根,系统呈临界阻尼状态, 阶跃响应为非周期过程。
4.当K>0.5时,闭环特征根为共轭复根,系统呈欠阻尼状态, 阶跃响应为衰减振荡。
可以认为开环零点和极点到达Sn的矢量的长度是相等的。对 无穷远处的试验点Sn而言,所有的零极点都汇集到实轴上的 一点σa。
σa= Zi= Pi ΣPi-ΣZi = (n-m)σa σa= (ΣPi-ΣZi)/(n-m)
绘制根轨迹的基本法则
又: K*(S-Z1)(S-Z2)…(S-Zm) ——————————— = -1 (S-P1)(S-P2)…(S-Pn)
绘制根轨迹的基本法则
一对共轭的开环复数极点(或零点)对S1(在实轴上的试验 点)的相角等值反号,相互抵消;而开环复数极点(或零点)又 一定成对出现,所以实轴上的根轨迹与复数零(极)点无关。
自动控制原理-线性系统的根轨迹法 (2)
閉環控制系統的動態性能與閉環極點在S平面上的 分佈位置是密切相關的,分析系統的性能時,往往要求 確定系統閉環極點的位置.另一方面,在分析和設計系 統時,經常需要研究一個或幾個參量變化時,對系統的 極點和系統性能的影響。
採用分解因式的古典方法求特徵方程式的根通常不容 易,特別是當某一參量發生變化(靈敏度)時,需要反復進 行計算,這時採用上述方法就顯得十分煩瑣,難以在實際 中應用。
K=0.5 K=0
該系統對於所有的K都是穩定的 穩態性能:
-1 0
原點處有一個極點 Ⅰ型系統
根軌跡上的K值就 是靜態誤差係數
0 K 0.5 : 过阻尼系 ,階统 躍回應為非週期過程
動態 K=0.5:临界阻尼 ,階系 躍回统應為非週期過程
性能:
K
0.5:欠阻尼,階系躍统 回應為阻上尼頁振盪下過頁程
返回
根據相角條件,在同一分離點分離的各條根軌跡 分支,它們的切線將均分360度。2條根軌跡在分離 點相隔180度,4條根軌跡在分離點相隔90度。
分離點的座標為:
m
1
n
1
i1 d zi
j1 d p j
分離角:根軌跡進入分離點的切線方向與離開分離點的切 線方向之間的夾角
(2k 1)
l
l-進入並立即離開分離點的 根軌跡條數
根軌跡:當系統某一參數在規定範圍內變化時,相應的系
統閉環特徵方程根在s平面上的位置也隨之變化移動,一個
根形成一條軌跡。
系統特徵根的圖解方法!!!
廣義根軌跡:系統的任意一變化參數形成根軌跡。
狹義根軌跡(通常情況):
變化參數為開環增益K,且其變化取值範圍為0到∞。
自動控制原理
一 根軌跡的概念
根軌跡法:系統某一參數變化時,繪製特徵方程的根在 S平面的位置變化軌跡的圖解方法。 根軌跡法的優點: 1:從已知的開環零、極點的位置及某一變化參數來求 取閉環極點的分佈,即解決閉環特徵式的求根問題。
自动控制理论实验报告
自动控制理论实验报告实验二控制系统的时域分析一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、实验要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0==?∞t x f dx x f 其拉氏变换为:)()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式:① )(sys impulse ;② );,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y =(二)分析系统稳定性有以下三种方法:1、利用pzmap 绘制连续系统的零极点图;2、利用tf2zp 求出系统零极点;3、利用roots 求分母多项式的根来确定系统的极点(三)系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容实验三控制系统的根轨迹分析一实验目的1.利用计算机完成控制系统的根轨迹作图2.了解控制系统根轨迹图的一般规律3.利用根轨迹图进行系统分析二实验要点1. 预习什么是系统根轨迹?2. 闭环系统根轨迹绘制规则。
三实验方法(一)方法:当系统中的开环增益k 从0到变化时,闭环特征方程的根在复平面上的一组曲线为根轨迹。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 线性系统的根轨迹研究
2.1 实验目的
(1)
考察闭环系统根轨迹的一般形成规律。
(2)
观察和理解引进零极点对闭环根轨迹的影响。
(3)
观察、理解根轨迹与系统时域响应之间的联系。
(4) 初步掌握利用产生根轨迹的基本指令和方法。
2.2 实验内容
根轨迹绘制的指令法、交互界面法;复平面极点分布和系统响应的关系。
已知单位负反馈系统的开环传递函数为2
)^54()2()(2+++=s s s K s G ,实验要求: (1) 试用MATLAB 的rlocus 指令,绘制闭环系统根轨迹。
(要求写出指令,并绘出图
形。
)
num=[1 2]
num =
1 2
>> den=[1 0 16 0 25]
den =
1 0 16 0 25
>> rlocus(tf(num,den));
(2)利用MATLAB的rlocfind指令,确定根轨迹的分离点、根轨迹与虚轴的交点。
(要求写出指令,并给出结果。
)
(3)利用MATLAB的rlocfind指令,求出系统临界稳定增益,并用指令验证系统的稳定性。
>> rlocfind(G)
Select a point in the graphics window
selected_point =
-0.0000 + 3.6025i
ans =
65.8411
>> sym G
G=tf([1 2],[1 8 26 40 25]);
sym p
den=[1 8 26 40 25];
p=roots(den)
ans =
G
ans =
p
p =
-2.0000 + 1.0000i
-2.0000 - 1.0000i
-2.0000 + 1.0000i
-2.0000 - 1.0000i
(4)利用SISOTOOL交互界面,获取和记录根轨迹分离点、根轨迹与虚轴的交点处的关键参数,并与前面所得的结果进行校对验证。
(要求写出记录值,并给出说明。
)
根轨迹与虚轴交点
分离点
(5) 在SISOTOOL 界面上,打开闭环的阶跃响应界面,然后用鼠标使闭环极点(小红
方块)从开环极点开始沿根轨迹不断移动,在观察三个闭环极点运动趋向的同时,注意观察系统阶跃响应的变化。
根据观察,(A )写出响应中出现衰减振荡分量时的K 的取值范围,(B )写出该响应曲线呈现“欠阻尼”振荡型时的K 的取值范围。
响应中出现衰减振荡分量时的K 的取值范围为0 ~3.25;
(6) 添加零点或极点对系统性能的影响,以二阶系统为例开环传递函数
)
6.0(1)(2s s s G += 添加零点,增加系统阻尼数,超调量减小,在sisotool 界面上做仿真,写出未添加零点时系统的超调量,峰值,调节时间,添加零点后系统的超调量,峰值,调节时间,并写出系统添加零点的数值,并进行理论分析。
(选做)
南京邮电大学
实验报告
实验名称:______________________ ______________________ ______________________
课程名称:______________________
学号:______________________
姓名:______________________
开课时间 20 /20 学年,第学期。