程序示例
安川机器人程序示例
安川机器人程序示例(总2页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--1 NOP 程序起始命令(空指令)2 *cycle 注释:循环运行3 MOVJ?C00000?VJ= point?①:距对中台大概150mm的位置4 PULSE?OT#(68)?T= RB时间测量point11?(取出待机位置)5 *Loop1 abel:Loop16 JUMP?*cyclstop?IF?IN#(16)=ONJUMP命令:循环停止指令?IN16为ON则跳至?label「CYCLESTOP」7 JUMP?*Whip_out?IF?IN#(18)=ONJUMP命令:可取出压机?板件?IN18为ON则跳至?label「Whipout」8 *Whip_out label:Whip_out?(去取对中台上的板件的工序)9 PULSE?OT#(31)?T= 脉冲信号(输出指定时间:开始取出?OUT3110 PULSE?OT#(16)?T= 脉冲信号(输出指定时间):吸取指令?OUT16?ON11 MOVJ?C00001?VJ= point?②:DF对中台吸取位置上(大概50mm 上)12 PULSE?OT#(57)?T= RB时间测量point2?(吸取位置上)13 MOVL?C00002?V=?PL=1 point?③:DF对中台上板件吸取位置14 PULSE?OT#(58)?T= RB时间测量point3?(吸取位置)15 TIMER?T= 定位精度提升的时间16 WAIT?IN#(24)=ON 待输入:吸取确认?ON17 PULSE?OT#(59)?T= RB时间测量?(吸取完毕)18 方MOVJ?C00003?VJ=point???④:DF对中台吸取位置上(Z方向上升至与point①同样位置,X方向稍微移至负方19 PULSE?OT#(60)?T= RB时间测量point4 (吸取位置上)20 TIMER?T= 定位精度提升的时间21 PULSE?OT#(27)?T= 脉冲信号:取出完毕?OUT2722 MOVJ?C00004?VJ= point?⑤:压机投入待机位置?23 PULSE?OT#(61)?T= RB时间测量point5?(取出待机位置)24 PULSE?OT#(62)?T= RB时间测量point6?(投入待机位置)25 WAIT?IN#(22)=ON 待输入:板件投入侧压机无异常26 WAIT?IN#(21)=ON 待输入:压机投料允许27 PULSE?OT#(32)?T= 脉冲信号:投入开始?OUT3228 PULSE?OT#(33)?T= 脉冲信号:往投入压机发出模具返回指令?OUT3329 MOVJ?C00005?VJ= point?⑥:投入轨迹时的RB手柄防振用的减速30 MOVL?C00006?V=?PL=4 point?⑦:板件释放位置上?31 PULSE?OT#(63)?T= RB时间测量point7?(释放位置上)32 MOVL?C00007?V=?PL=3 point?⑧:板件释放位置33 PULSE?OT#(64)?T= RB时间测量point8?(释放位置)34 TIMER?T= 定位精度提升的时间35? PULSE?OT#(17)?T= OUT17脉冲信号:释放指令36 WAIT?IN#(24)=OFF 待输入:时间测量point?OFF37 PULSE?OT#(65)?T= RB时间测量?(释放完了)38 MOVJ?C00008?VJ= point?⑨:板件释放位置上?39 PULSE?OT#(66)?T= RB时间测量point9?(释放位置上)40 MOVJ?C00009?VJ= point?⑩:返回轨迹时的RB手柄防振减速?41 MOVJ?C00010?VJ= point??:point⑤?返回压机投入待机位置42 PULSE?OT#(67)?T= RB时间测量point10?(投入完了位置)43 OUT28PULSE?OT#(28)?T= 脉冲信号:投入完了?44 *Loop2 label:Loop245 JUMP?*cyclstop?IF?IN#(16)=ONJUMP命令:循环停止指令?IN16为ON则跳至?label「cyclstop」46 JUMP?*cycle?IF?IN#(39)=ONJUMP命令:自动循环中?IN39为ON则跳至?label;?「cycle」47 JUMP?JOB:HOME_POS?IF?IN#(23)=ONJUMP命令:作业原点移动指令?IN23为ON则跳至JOB「HOME_POS」48 JUMP?*Loop2 JUMP命令:返回「Loop2」49 MOVJ?C00011?VJ= 与①同样的point(认为没必要的step???)50 *cyclstop label:cyclstop51 END END命令:宣告JOB完毕。
川崎机器人程序示例

PROGRAM a()#0;左小车HOMESWAIT 39RESETra = 1100 HOMEJMOVE point0LMOVE point1LMOVE point2LMOVE waitpoint;抓件等待点POINT #pickfront = SHIFT(pickpoint BY 0,200.5*(ra-1),500) ;抓件上方点计算公式 LMOVE #pickfront;抓件上方点SPEED 10POINT #picka = SHIFT(pickpoint BY 0,200*(ra-1),0) ;抓件点计LMOVE #picka;抓件点TWAIT 1SIGNAL 1SPEED 20LAPPRO #picka,500 ;抓件后上升位LMOVE point3SPEED 40LMOVE point4LMOVE point5SPEED 50LMOVE waitplaceTWAIT 1CALL correctLMOVE waitpoint2;放件等待点POINT #placefront = SHIFT(placepoint BY 0,200*(ra-1),80)LMOVE #placefront;放件上方点SPEED 10POINT #place = SHIFT(placepoint BY 0,200*(ra-1),0)LMOVE #place;放件点TWAIT 1SIGNAL -1SPEED 20LAPPRO #place,120LMOVE point30ra = ra+1IF ra<=5 THENGOTO 100ELSEGOTO 200200 ra = 1ENDPULSE 51,1.5HOME.END.PROGRAM b()#0;左小车HOMESWAIT 39RESETrb = 1LMOVE pointb2LMOVE waitpointbPOINT #pickfrontb = SHIFT(pickpointb BY 0,200*(rb-1),400) LMOVE #pickfrontbSPEED 10POINT #pickb = SHIFT(pickpointb BY 0,200*(rb-1),0)LMOVE #pickbTWAIT 1SIGNAL 1SPEED 20LAPPRO #pickb,500LMOVE pointb3SPEED 40LMOVE pointb4LMOVE pointb5SPEED 50LMOVE waitplaceTWAIT 1CALL correctLMOVE waitpoint2;放件等待点POINT #placefront = SHIFT(placepoint BY 200*(rb-1),0,80) LMOVE #placefront;放件上方点SPEED 10POINT #place = SHIFT(placepoint BY 200*(rb-1),0,0)LMOVE #place;放件点TWAIT 1SIGNAL -1SPEED 20LAPPRO #place,120LMOVE point30rb = rb+1IF rb<=5 THENGOTO 100ELSEGOTO 200200 rb = 1ENDPULSE 51,1.5HOME.END.PROGRAM correct()#0LMOVE waitplaceSPEED 20LMOVE p1acepointTWAIT 1SWAIT 1004SIGNAL -1LMOVE point06LMOVE point6SPEED 40LMOVE point7TWAIT 1SIGNAL 1SWAIT 1001,1002,1003LMOVE point9LMOVE point10LMOVE point12LMOVE point14.END.PROGRAM home()#0HOME.END.PROGRAM main()#0CALL homeCALL pg30.END.PROGRAM pg10()#2HOMESWAIT 39RESETra = 1100 HOMEJMOVE point0LMOVE point1LMOVE point2LMOVE waitpointPOINT #pickfront = SHIFT(pickpoint BY 0,200.5*(ra-1),500) LMOVE #pickfrontSPEED 10POINT #picka = SHIFT(pickpoint BY 0,200*(ra-1),0)LMOVE #pickaTWAIT 1SIGNAL 1SPEED 20LAPPRO #picka,500LMOVE point3SPEED 40LMOVE point4LMOVE point5SPEED 50LMOVE waitplaceTWAIT 1ra = ra+1IF ra<=5 THENGOTO 100ELSEGOTO 200200 ra = 1ENDPULSE 51,1.5HOME.END;抓件上方点计算公式件点计算公式件后上升位。
vb初学经典程序示例
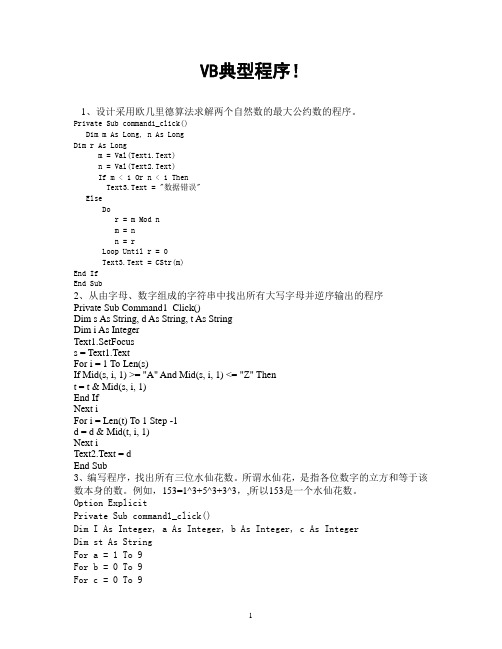
VB典型程序!1、设计采用欧几里德算法求解两个自然数的最大公约数的程序。
Private Sub command1_click()Dim m As Long, n As LongDim r As Longm = Val(Text1.Text)n = Val(Text2.Text)If m < 1 Or n < 1 ThenText3.Text = "数据错误"ElseDor = m Mod nm = nn = rLoop Until r = 0Text3.Text = CStr(m)End IfEnd Sub2、从由字母、数字组成的字符串中找出所有大写字母并逆序输出的程序Private Sub Command1_Click()Dim s As String, d As String, t As StringDim i As IntegerText1.SetFocuss = Text1.TextFor i = 1 To Len(s)If Mid(s, i, 1) >= "A" And Mid(s, i, 1) <= "Z" Thent = t & Mid(s, i, 1)End IfNext iFor i = Len(t) To 1 Step -1d = d & Mid(t, i, 1)Next iText2.Text = dEnd Sub3、编写程序,找出所有三位水仙花数。
所谓水仙花,是指各位数字的立方和等于该数本身的数。
例如,153=1^3+5^3+3^3,,所以153是一个水仙花数。
Option ExplicitPrivate Sub command1_click()Dim I As Integer, a As Integer, b As Integer, c As IntegerDim st As StringFor a = 1 To 9For b = 0 To 9For c = 0 To 9I = a * 100 + b * 10 + cIf I = a ^ 3 + b ^ 3 + c ^ 3 Thenst = I & "=" & a & "^3+" & b & "^3+" & c & "^3"List1.AddItem stEnd IfNext cNext bNext aEnd Sub4、将一个二进制数原码转换成补码。
程序编写示例

8.1预防措施控制程序8.7.1《预防措施控制程序》编写背景K公司是一个建筑工程公司,其组织结构图如下:由于涉及大量大型工程项目,包括多种方面的情况,特别是财务状况与工程质量两个部分,都十分容易发生问题,因此要求采取预警系统,杜绝可能发生的问题。
另外实现通报手段,将质量、财务、工期等重大问题向各基层组织通报,引起注意,及时采取预防措施。
公司下发通报时,要求填报通报附页,这样可以将基层讨论的结果汇总,收集下属的意见和建议,有利于公司及时采取预警措施。
8.7.2《预防措施控制程序》正文1.适用范围公司经营过程中发生不合格以后,或公司领导认为有必要时,根据本程序要求识别预防措施,以消除潜在不合格原因,防止不合格发生。
2.职责分配2.1 管理者代表主持,企管办具体负责预防措施的制订和实施;2.2 各相关部门参与预防措施的制订和实施;2.3 企管办负责《质量情况通报》的编制、发放与信息回收、整理;2.4 财务部、质检部分别负责对财务部情况和工程质量情况的预警系统进行操作。
3.2 《财务状况预警系统》3.3 《工程质量预警系统》3.4 预防措施的制订、实施和评审4.程序说明4.1《质量情况通报》,下简称《通报》4.1.1 企管办每季度第一个月10日前,将编制的《通报》发放到公司领导及各部门和班组,内容包括:a.上季度公司质量情况总体分析;b.上季度出现各类不合格情况统计资料,包括不合格项数,分布,纠正结果,造成损失,主要原因等;c.重大不合格情况,包括具体情况介绍,纠正情况,损失情况,原因分析,责任部门,处理意见等;d.纠正措施和预防措施的执行情况;e.质量活动中先进事例的表扬和懈怠情况的批评;f.质量工作部署,包括公司决定,决议,领导的指示,有关专家的分析,下一步工作的步骤等。
4.1.2 质检部,财务部和其他相关部门在每季度结束前五天将有关资料与信息交企管办;4.1.3 企管办负责收集资料,编写《通报》,报管理者代表审核,总经理签发;4.1.4《通讯》属内部文件,作为受控文件管理;4.1.5 各部门和班组收到《通报》后,十天内组织全体人员学习和讨论,并填写《通报》附页,报企管办。
安川机器人程序示例

1 NOP 程序起始命令(空指令)2 *cycle 注释:循环运行3 MOVJ?C00000?VJ= point?①:距对中台大概150mm的位置4 PULSE?OT#(68)?T= RB时间测量point11?(取出待机位置)5 *Loop1 abel:Loop16 JUMP?*cyclstop?IF?IN#(16)=ONJUMP命令:循环停止指令?IN16为ON则跳至?label「CYCLESTOP」7 JUMP?*Whip_out?IF?IN#(18)=ONJUMP命令:可取出压机?板件?IN18为ON则跳至?label「Whipout」8 *Whip_out label:Whip_out?(去取对中台上的板件的工序)9 PULSE?OT#(31)?T= 脉冲信号(输出指定时间:开始取出?OUT3110 PULSE?OT#(16)?T= 脉冲信号(输出指定时间):吸取指令?OUT16?ON11 MOVJ?C00001?VJ= point?②:DF对中台吸取位置上(大概50mm上)12 PULSE?OT#(57)?T= RB时间测量point2?(吸取位置上)13 MOVL?C00002?V=?PL=1 point?③:DF对中台上板件吸取位置14 PULSE?OT#(58)?T= RB时间测量point3?(吸取位置)15 TIMER?T= 定位精度提升的时间16 W AIT?IN#(24)=ON 待输入:吸取确认?ON17 PULSE?OT#(59)?T= RB时间测量?(吸取完毕)18 方MOVJ?C00003?VJ=point???④:DF对中台吸取位置上(Z方向上升至与point①同样位置,X方向稍微移至负方19 PULSE?OT#(60)?T= RB时间测量point4 (吸取位置上)20 TIMER?T= ?定位精度提升的时间?21 PULSE?OT#(27)?T= 脉冲信号:取出完毕?OUT2722 MOVJ?C00004?VJ= point?⑤:压机投入待机位置?23 PULSE?OT#(61)?T= RB时间测量point5?(取出待机位置)24 PULSE?OT#(62)?T= RB时间测量point6?(投入待机位置)25 W AIT?IN#(22)=ON 待输入:板件投入侧压机无异常26 W AIT?IN#(21)=ON 待输入:压机投料允许27 PULSE?OT#(32)?T= 脉冲信号:投入开始?OUT3228 PULSE?OT#(33)?T= 脉冲信号:往投入压机发出模具返回指令?OUT3329 MOVJ?C00005?VJ= point?⑥:投入轨迹时的RB手柄防振用的减速30 MOVL?C00006?V=?PL=4 point?⑦:板件释放位置上?31 PULSE?OT#(63)?T= RB时间测量point7?(释放位置上)32 MOVL?C00007?V=?PL=3 point?⑧:板件释放位置33 PULSE?OT#(64)?T= RB时间测量point8?(释放位置)34 TIMER?T= 定位精度提升的时间35? PULSE?OT#(17)?T= OUT17脉冲信号:释放指令36 WAIT?IN#(24)=OFF 待输入:时间测量point?OFF37 PULSE?OT#(65)?T= RB时间测量?(释放完了)38 MOVJ?C00008?VJ= point?⑨:板件释放位置上?39 PULSE?OT#(66)?T= RB时间测量point9?(释放位置上)40 MOVJ?C00009?VJ= point?⑩:返回轨迹时的RB手柄防振减速?41 MOVJ?C00010?VJ= point??:point⑤?返回压机投入待机位置42 PULSE?OT#(67)?T= RB时间测量point10?(投入完了位置)43 OUT28PULSE?OT#(28)?T= 脉冲信号:投入完了?44 *Loop2 label:Loop245 JUMP?*cyclstop?IF?IN#(16)=ONJUMP命令:循环停止指令?IN16为ON则跳至?label「cyclstop」46 JUMP?*cycle?IF?IN#(39)=ONJUMP命令:自动循环中?IN39为ON则跳至?label;?「cycle」47 JUMP?JOB:HOME_POS?IF?IN#(23)=ONJUMP命令:作业原点移动指令?IN23为ON则跳至JOB「HOME_POS」48 JUMP?*Loop2 JUMP命令:返回「Loop2」49 MOVJ?C00011?VJ= 与①同样的point(?认为没必要的step????)50 *cyclstop label:cyclstop51 END END命令:宣告JOB完毕。
质量管理体系文件控制程序示例

质量管理体系文件控制程序示例一:质量管理体系文件控制程序示例1. 文件控制的目的1.1 本程序的目的是确保质量管理体系中所有文件的创建、更新、分发和废止都按照一致的过程进行,以保证文件的准确性、完整性和可用性。
2. 文件管理的原则2.1 所有质量管理体系文件必须经过编制、审核、批准和授权,确保与实际工作相一致。
2.2 所有文件必须进行编号,并有详细的版本和修改记录。
3. 文件的分类3.1 质量手册3.1.1 质量手册是质量管理体系的核心文件,记录了组织的质量政策、质量目标和质量管理体系的结构。
3.1.2 质量手册由质量经理编制,经过质量管理委员会批准后发布。
3.2 程序文件3.2.1 程序文件包括各种操作规程、工艺流程等,用于指导和规范实际工作。
3.2.2 程序文件由相关部门编制,经过相关部门负责人审查和批准后发布。
3.3 工作指导文件3.3.1 工作指导文件用于指导具体工作环节中的操作方法、技术要求等。
3.3.2 工作指导文件由具体工作负责人编制,经过审核通过后发布。
4. 文件的创建和更新4.1 新建文件4.1.1 新建文件需编写文件申请书,包括文件名称、目的、应用范围、编制人、审核人等信息。
4.1.2 文件申请书需要经过相关部门负责人审核通过后,方可进行文件的编制工作。
4.2 文件的更新4.2.1 所有文件需定期进行审查,确保其与实际工作相符合。
4.2.2 更新文件需要编写文件更新申请书,并经过相关部门负责人审核通过后,进行文件的修改和更新。
5. 文件的分发和废止5.1 文件的分发5.1.1 新建文件和更新后的文件需及时分发给相关人员,并在文件上标明分发日期和相关人员。
5.1.2 分发文件的人员需填写分发清单,记录文件的分发情况。
5.2 文件的废止5.2.1 文件如果已经过时或者发现有错误,需要进行废止处理。
5.2.2 废止文件需编写废止通知,并通知相关人员将文件停止使用。
6. 相关附件本文档涉及附件:- 文件申请书模板- 文件更新申请书模板- 分发清单样例- 废止通知样本7. 法律名词及注释- 质量管理体系:指组织为了满足质量要求而建立、实施和保持的一系列相互关联的质量管理活动。
matlab单位换算程序示例

matlab单位换算程序示例以下是一个示例程序,用于将不同单位间的数值进行转换。
```matlab% 输入待转换的数值和单位value = input('请输入数值:');unit = input('请输入单位:', 's');% 检查输入的单位,并进行相应的转换计算switch unitcase 'cm'm_value = value / 100; % 将厘米转换为米mm_value = value * 10; % 将厘米转换为毫米case 'm'cm_value = value * 100; % 将米转换为厘米mm_value = value * 1000; % 将米转换为毫米case 'mm'cm_value = value / 10; % 将毫米转换为厘米m_value = value / 1000; % 将毫米转换为米otherwiseerror('不支持的单位');end% 输出转换结果disp(['厘米:' num2str(cm_value)]);disp(['米:' num2str(m_value)]);disp(['毫米:' num2str(mm_value)]);```该程序首先通过 `input` 函数获取待转换的数值和单位。
然后使用 `switch` 语句来检查输入的单位,并根据不同的单位进行相应的转换计算。
最后,使用 `disp` 函数输出转换结果。
使用该程序时,可以在MATLAB 命令窗口中输入数值和单位,程序会根据输入的单位进行转换,并输出转换结果。
例如,如果输入数值为 "100",单位为 "cm",程序会输出厘米、米和毫米三种单位的转换结果。
编写简单PLC程序示例2024新版

04
示例二:灯光闪烁控制程序
控制需求描述
控制一盏灯以1秒的周期进行闪烁,即灯在1秒内先亮后灭。
可以通过一个按钮来控制灯的闪烁,按下按钮时灯开始闪烁,再次按下按钮时灯停止闪烁。
输入输出信号设计
输入信号
按钮信号,使用PLC的数字输入端口 ,当按钮按下时,输入信号为ON。
输出信号
灯光控制信号,使用PLC的数字输出 端口,当输出信号为ON时,灯亮起 ;当输出信号为OFF时,灯熄灭。
02
编写简单PLC程序步骤
明确控制需求与功能
确定被控对象及其工艺流程
了解被控对象的类型、工作原理和工艺流程,明确需要实现 的控制功能。
分析控制要求
根据工艺流程,分析被控对象的输入、输出信号,以及它们 之间的逻辑关系和时间顺序等控制要求。
选择合适PLC型号及硬件配置
选择PLC型号
根据控制需求和功能,选择合适的 PLC型号,包括CPU类型、I/O点数 、存储容量等。
梯形图或指令表编写
|V
| (加热器停止) ||
梯形图或指令表编写
01
02
+---(比较指令:温度>设定上限)
||
03
VV
梯形图或指令表编写
梯形图或指令表编写
``` 指令表示例
梯形图或指令表编写
01
```
LD 温度传感器
02
03
CMP< 设定下限
梯形图或指令表编写
01
OUT 加热器启动
02
1
指令表
2
```
3
梯形图或指令表编写
LD I0.0 OUT Q0.0 LD I0.1
梯形图或指令表编写
C语言题目及示例程序

0 0
示例输出
6
30
#include<stdio.h>
void main()
{
int a,b;
while(scanf("%d%d",&a,&b)!=EOF)
{
if(a==0&&b==0)break;
printf("%d\n",a+b);
}
}
C语言实验——逆置正整数
Time Limit: 1000MS Memory limit: 65536K
3 1 2
3 2 1
1 2 4
1 4 2
2 1 4
2 4 1
4 1 2
4 2 1
1 3 4
1 4 3
3 1 4
3 4 1
4 1 3
4 3 1
2 3 4
2 4 3
3 2 4
3 4 2
4 2 3
4 3 2
#include<stdio.h>
void main()
{
int a,b,c,d,e,f;
scanf("%d%d%d%d",&a,&b,&c,&d);
printf("%d%d%d\n",g,s,b);
else
printf("%d%d\n",s,b);
}
C/C++经典程序训练1---最大公约数与最小公倍数
Time Limit: 1000MS Memory limit: 65536K
题目描述
输入两个整数,求它们的最大公约数与最小公倍数。
ABB PLC 新手入门------经典程序示例
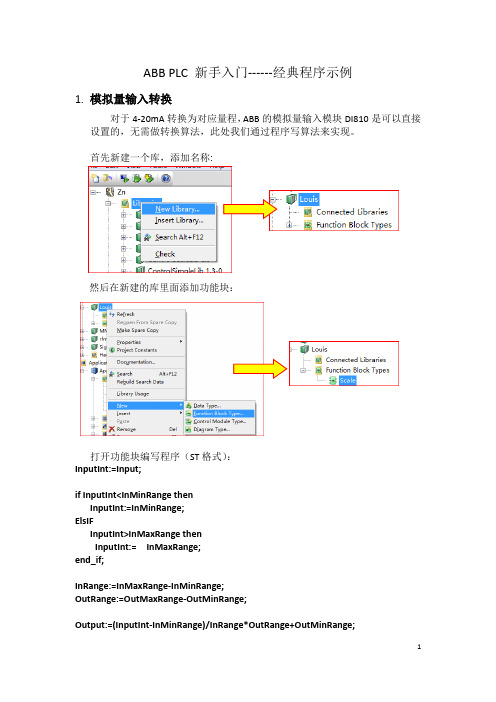
ABB PLC 新手入门------经典程序示例1.模拟量输入转换对于4-20mA转换为对应量程,ABB的模拟量输入模块DI810是可以直接设置的,无需做转换算法,此处我们通过程序写算法来实现。
首先新建一个库,添加名称:然后在新建的库里面添加功能块:打开功能块编写程序(ST格式):InputInt:=Input;if InputInt<InMinRange thenInputInt:=InMinRange;ElsIFInputInt>InMaxRange thenInputInt:= InMaxRange;end_if;InRange:=InMaxRange-InMinRange;OutRange:=OutMaxRange-OutMinRange;Output:=(InputInt-InMinRange)/InRange*OutRange+OutMinRange;定义的变量如下:代码:接下来我们在程序中调用自己写的功能块:2.点击此处找到自己写的库函数中的功能块:1.打开程序,右击选择插入功能块:3.插入后如下:最后,下载到仿真器测试,效果如下:0~16384对应0-100,因此输入8192,则输出为50,测试正确。
顺便再介绍下ABB PLC 中的变量定义及其属性:变量名称和西门子不一样的是不是以M 或者开头,可以任意单词定义;类型是一样的,都有整形,浮点数,字符串等;属性如下图:各属性区别如下:◆ no attribute---重启后数据不保持,替换为初始值;若未设置初始值,会获取这个数据类型的默认值。
◆ retain----------热重启数据可以保持;冷重启不保持,替换为初始值。
◆ coldretain ----热重启和冷重启数据都能保持,此属性在结构化数据类型中重写了保持属性。
◆ constant ------常量,在编译下载之后无法改变此值,此属性在结构化数据类型中重写了保持属性。
F-程序示例

C、C++和Java程序示例在附录的这一部分,我们介绍一些用三种编程语言C、C++和Java写的例子,整体上给出这三种编程语言的结构概念。
例F.1 这个例子使用C语言中的循环和函数,打印一个日历上的月,使用的函数名为printMonth,它只接收这个月的开始天和这个月的天数作为输入。
这就是打印一年中任意一个月程序所要知道的。
程序F.l显示了主程序、函数和结果。
程序F.l例1打印一个日历上的月/* Test driver for function to print a calendar month,Written by:Date:*/#include <stdio.h>//Prototype declarationsvoid printMonth (int startDay, int days);int main (void){//StatementsprintMonth(2,29); //Day 2 is Tuesdayreturn 0;} //main/* ================== printMonth====================Print one calendar month.Pre:startDay is day of week relative to Sunday(0)Post:Calendar printed*/void printMonth (int startDay, int days)//Local Declarationsint weekday;//Statements//print day headerprintf("Sun Mon Tue Wed Thu Fri Sat\n");//position first dayfor (weekday=0; weekday<startDay; weekday++)printf( "" );for (int dayCount=1; dayCount<=days; dayCount++)if (weekDay>6)printf("\n");weekDay=l;} //ifelseweekDay++;print~("%3d",dayCount);}//forreturn;}//printMonthResults:Sun Mort Tue Wed Thu Fri Sat1 2 3 4 56 7 8 9 10 11 1213 14 15 16 17 18 1920 21 22 23 24 25 2627 28 29例F.2这个例子使用了C++中的一个类和三个继承的子类。
COMLIB 通讯程序示例

1. COMLIB 通讯程序示例1. 1 PC ( COM1 和COM2 ) 按字节发送- 接收全局变量VAR_GLOBAL(* Test COM1 at PC Interface COM1 *)COM1InData AT %IB100 : PcComInData;COM1OutData AT %QB100 :PcComOutData;COM1RxBuffer : ComBuffer;COM1TxBuffer : ComBuffer;(* Test COM2 at PC Interface COM2 *)COM2InData AT %IB200 : PcComInData;COM2OutData AT %QB200 :PcComOutData;COM2RxBuffer : ComBuffer;COM2TxBuffer : ComBuffer;END_VAR后台程序:ComBackgroundPROGRAM ComBackgroundVARCOM1Control : PcComControl;COM2Control : PcComControl;END_VARCOM1Control( COMin := COM1InData ,COMout := COM1OutData ,TxBuffer := COM1TxBuffer ,RxBuffer := COM1RxBuffer );COM2Control( COMin := COM2InData ,COMout := COM2OutData ,TxBuffer := COM2TxBuffer ,RxBuffer := COM2RxBuffer );测试程序:TESTCOM1PROGRAM TESTCOM1VARSendData : ARRAY[0..9] OF BYTE := 1,2,3,4,5,6,7,8,9,10;RecData : ARRAY[0..9] OF BYTE;COM1Send : SendByte;COM2Rec : ReceiveByte;Delay : TON;I : BYTE;Index : BYTE := 0;END_VAR(* 按字节方式发送数据到COM1 *)Delay(IN := TRUE,PT := T#100MS);IF Delay.Q THENDelay(IN := FALSE);FOR i := 0 TO 9 DOCOM1Send( SendByte := SendData[i], TxBuffer := COM1TxBuffer);END_FORFOR i := 0 TO 9 DOSendData[i] := SendData[i] + 1;END_FOREND_IF(* 按字节方式从COM2 接收数据*)COM2Rec( RxBuffer := COM2RXbuffer);IF COM2Rec.ByteReceived THENRecData[Index] := COM2Rec.ReceivedByte;Index := Index + 1;IF Index >= SIZEOF(RecData) THENIndex := 0;END_IFEND_IF主程序:MAINPROGRAM MAINVAREND_VARTESTCOM1;1.2 PC ( COM1 和COM2 ) 按字符串发送-接收全局变量: 同上后台程序:ComBackground 同上测试程序:TESTCOM1PROGRAM TESTCOM1VARSendString : STRING := '$$Hello, welcome to BECKHOFF !$$';RecString : STRING;(注:可变换为无Prefix 和Suffix 示例,应加:TIMEOUT := T#80MS ) Prefix : STRING := '$$';Suffix : STRING := '$$';TimeOut : TIME := T#0MS;Reset : BOOL;COM1SString :SendString;COM2RString : ReceiveString;Delay : TON;END_VAR(* 按字符串方式发送数据到COM1 *)Delay(IN := TRUE,PT := T#100MS);IF Delay.Q THENDelay(IN := FALSE);COM1SString( SendString := SendString, TxBuffer := COM1TxBuffer); END_IF(* 按字符串方式从COM2 接收数据*)COM2RString(Prefix := Prefix,Suffix := Suffix,Timeout := TimeOut,Reset := Reset,ReceivedString := RecString,RxBuffer := COM2RxBuffer);主程序:MAINPROGRAM MAINVAREND_VARTESTCOM1;1.3 PC ( COM1 和COM2 ) 按数据发送-接收全局变量: 同上后台程序:ComBackground 同上测试程序:TESTCOM1PROGRAM TESTCOM1VARPrefix : ARRAY[0..1] OF BYTE := 16#0D,16#0A;Suffix : ARRAY[0..1] OF BYTE := 16#0D,16#0A;SendData : ARRAY[0..9] OF BYTE :=16#0D,16#0A,1,2,3,4,5,6,16#0D,16#0A;RecData : ARRAY[0..9] OF BYTE;COM1SData : SendData;COM2RData : ReceiveData;Delay : TON;Reset : BOOL;i : BYTE;END_VAR(* 按任意类型数据方式发送数据到COM1 *)Delay(IN := TRUE,PT := T#100MS);IF Delay.Q THENDelay(IN := FALSE);COM1SData(pSendData := ADR(SendData),Length := SIZEOF(SendData),TxBuffer := COM1TxBuffer);FOR i := 2 TO 7 DOSendData[i] := SendData[i] + 1;END_FOREND_IF(* 按任意类型数据方式从COM2 接收数据*)COM2RData(pPrefix := ADR(Prefix),LenPrefix := SIZEOF(Prefix),pSuffix := ADR(Suffix),LenSuffix := SIZEOF(Suffix),pReceiveData := ADR(RecData),SizeReceiveData := SIZEOF(RecData),Timeout := T#50MS,Reset := Reset,RxBuffer := COM2RxBuffer);主程序:MAINPROGRAM MAINVAREND_VARTESTCOM1;1.4 ASC 功能说明主程序:MAINPROGRAM MAINVARascout : BYTE;str : STRING := 'a';END_VARascout := ASC(str);1.5 CHR 功能说明主程序:MAINPROGRAM MAINVARchrout : STRING;cinp : BYTE := 48;END_VARchrout := CHR(cinp);1.6 KL6001 串行数据通讯全局变量:VAR_GLOBALKl6InData AT %IB0 : KL6inData5B;Kl6OutData AT %QB0 : KL6outData5B;RxBuffer : ComBuffer;TxBuffer : ComBuffer; END_VAR主程序:PROGRAM MAINVARComControl : KL6Control5B;Timer : TON;Receive : ReceiveByte;Send : SendByte;Rb : BYTE;Sb : BYTE;END_VARComControl( COMin:=KL6InData ,COMout:=KL6OutData ,TxBuffer:=TxBuffer ,RxBuffer:=RxBuffer );Timer(IN:=TRUE , PT:=T#1S );IF Timer.Q THEN(* 每秒发送一个字符*)IF Sb = 0 THENSb := 64;END_IFSb := Sb + 1;IF Sb > 90 THENSb := 64;END_IFSend(SendByte:=Sb , TxBuffer:=TxBuffer );Timer(IN:=FALSE );END_IFReceive( RxBuffer:=Rxbuffer );IF Receive.ByteReceived THEN(* 获取接收的字符*)Rb := Receive.ReceivedByte;(* 其它程序处理 ... *)END_IF1.6 KL6021 – KL6021 RS-485 之间的串行数据通讯1.6.1 发送方:全局变量:VAR_GLOBALKL6021_1InData AT %IB0 : KL6inData5B;KL6021_1OutData AT %QB0 : KL6outData5B;KL6021_1RxBuffer : ComBuffer;KL6021_1TxBuffer : ComBuffer;END_VAR主程序:PROGRAM MAINVARKL6021_1ComControl : KL6Control5B;KL6021_1Send : SendByte;SendData : ARRAY[0..9] OF BYTE := 10(16#68);Index1 : BYTE := 0;T01 : TON;I : BYTE;KL6021_1Receive : ReceiveByte;ReceiveData : ARRAY[0..19] OF BYTE := 20(16#0);Index : BYTE := 0;END_VARKL6021_1ComControl( COMin := KL6021_1InData,COMout := KL6021_1OutData,RxBuffer := KL6021_1RxBuffer,TxBuffer := KL6021_1TxBuffer);(* =============== KL6021_1 Send Data =============== *)IF NOT KL6021_1Send.Busy THENKL6021_1Send( SendByte := SendData[Index1],TxBuffer := KL6021_1TxBuffer);Index1 := Index1 + 1;IF Index1 >= SIZEOF(SendData) THENIndex1 := 0;END_IFEND_IFT01( IN := NOT T01.Q,PT := T#800MS);SendData[0] := 16#FF;SendData[1] := 16#FF;SendData[9] := 16#0D;IF T01.Q THENFOR i := 2 TO 8 DOSendData[i] := SendData[i] + i;END_FOREND_IFKL6021_1Receive( RxBuffer := KL6021_1RXbuffer);IF KL6021_1Receive.ByteReceived THENReceiveData[Index] := KL6021_1Receive.ReceivedByte;Index := Index + 1;IF Index >= SIZEOF(ReceiveData) THENIndex := 0;END_IFEND_IF%QB6 := SendData[2];1.6.2 接收方:全局变量:VAR_GLOBALKL6021_2InData AT %IB0 : KL6inData5B;KL6021_2OutData AT %QB0 : KL6outData5B;KL6021_2RxBuffer : ComBuffer;KL6021_2TxBuffer : ComBuffer;END_VAR主程序:PROGRAM MAINVARKL6021_2ComControl : KL6Control5B;KL6021_2Receive : ReceiveByte;ReceiveData : ARRAY[0..19] OF BYTE := 20(16#0);Index : BYTE := 0;END_VARKL6021_2ComControl( COMin := KL6021_2InData,COMout := KL6021_2OutData,RxBuffer := KL6021_2RxBuffer,TxBuffer := KL6021_2TxBuffer);(* =============== KL6021_2 receive Data =============== *)KL6021_2Receive( RxBuffer := KL6021_2RXbuffer);IF KL6021_2Receive.ByteReceived THENReceiveData[Index] := KL6021_2Receive.ReceivedByte;Index := Index + 1;IF Index >= SIZEOF(ReceiveData) THENIndex := 0;END_IFEND_IF2. Modbus RTU 通讯2.1 PC 作Modbus RTU 从站全局变量:VAR_CONFIG.Port.IO.out AT %QB0 : ModbusPcComOutData;.Port.IO.in AT %IB0 : ModbusPcComInData;END_VAR主程序:PROGRAM MAINVARMB1 : ModbusRtuSlave_PcCOM;Input AT %IW100 : ARRAY [0..9] OF WORD;Output AT %QW100 : ARRAY [0..9] OF WORD;Memory AT %MW100 : ARRAY [0..9] OF WORD;ErrorID : Modbus_Errors;END_VARTwinCAT 系统管理器链接:略2.2 PC 作Modbus RTU 主站示例程序参见:Modbus RTU 软件说明2.3 BC 作Modbus RTU 主站示例程序参见:Modbus RTU 软件说明2.4 BC 作Modbus RTU 从站示例程序参见:Modbus RTU 软件说明2.5 PC 作Modbus RTU 主站,BC7300 作从站示例程序2.5.1 PC 机程序全局变量:VAR_CONFIG.Port.IO.out A T %QB0 : ModbusPcComOutData;.Port.IO.in AT %IB0 : ModbusPcComInData; END_VAR主程序:PROGRAM MAINVARMB1 : ModbusRtuMaster_PcCOM;ReadVal : ARRAY[0..4] OF WORD;UnitID : BYTE := 11;Quantity : WORD := 2;MBAddr : WORD := 0;cbLength : UINT := 4;bExecute : BOOL;bBusy : BOOL;Error : BOOL;ErrorID : MODBUS_ERRORS;cbRead : UINT;END_VARTwinCAT 系统管理器链接:略2.5.2 BC7300 测试程序Blink 程序:PROGRAM BlinkVARTimer1 : TON;Timer2 : TON;fbCounter1 : CTU;fbCounter2 : CTD;END_VAR主程序:PROGRAM MAINVARbInput AT %IX0.0 : BOOL; END_VARIF NOT bInput THENBlink;%QX0.1 := TRUE;ELSE%QX0.1 := FALSE;END_IF2.6 PC 与BC8000 / BK8000 通讯程序:略2.7 ADS 通讯程序:略3. PID 控制示例:3.1 惯性环节测试:PROGRAM MAINVARfbPT1 : FB_P_T1;bInit : BOOL := TRUE;fCycleTime : LREAL := 0.01;Kp : LREAL := 1.0;T1 : LREAL := 5.0;fVal : LREAL := 80.0;fOut : LREAL;END_VAR3.2 BCxxxx PID 测试:3.2.1 过程对象仿真:FUNCTION_BLOCK SIMUVAR_INPUTInp : REAL;END_VARVAR_IN_OUTIndex : BYTE;Buffer : ARRAY[0..9] OF REAL; END_VARVAR_OUTPUTOut : REAL;END_VARVARi : BYTE;Sum : REAL;END_VARIF (Index > 9) OR (Index < 0) THENIndex := 0;END_IFBuffer[Index] := Inp;Index := Index + 1;Sum := 0;FOR i := 0 TO 9 DOSum := Sum + Buffer[i];END_FOROut := Sum / 10.0;3.2.2 测试程序:TESTPROGRAM TESTVARSIMU1 : SIMU;Vinp : REAL ;Index : BYTE := 0;Buffer : ARRAY [0..9] OF REAL;Vout : REAL;PID1 : CtrlStandardPID;bInit : BOOL := TRUE;Vset : REAL := 50.0;fKp : REAL := 0.8;fTn : REAL := 0.28;nErrorStatus : DINT;bMax AT %QX0.0 : BOOL;bMin AT %QX0.1 : BOOL;bARW : BOOL;conv AT %QB1 : BYTE;END_VAR3.2.3 主程序:MAIN PROGRAM MAIN VAREND_VARTEST;3.3 温度控制示例3.3.1 过程对象仿真:FUNCTION_BLOCK FB_ProcessVAR_INPUTy : LREAL;Ta : LREAL;xOffset : LREAL;bInit : BOOL;bNoise : BOOL;END_VARVAR_OUTPUTx : LREAL;END_VARVARKP1 : LREAL := 1.0;KP2 : LREAL := 1.0;T11 : LREAL := 1.0;T12 : LREAL := 10;iDeadTime : INT := 0;StreckeTeil1 : FB_P_T1;StreckeTeil2 : FB_P_T1;StreckeDeadtime : FB_DeadTime;StreckeNoise : DRAND;END_VARStreckeTeil1(bInit := bInit ,fCycleTime := Ta,Kp := Kp1,T1 := T11,fNewValue := y );StreckeTeil2(bInit := bInit ,fCycleTime := Ta,Kp := Kp2,T1 := T12,fNewValue := StreckeTeil1.fOutValue ); StreckeDeadTime(bInit :=bInit ,dlyCycles := iDeadTime,fInVal := StreckeTeil2.fOutValue );x := StreckeDeadTime.fOutVal;IF bNoise THENStreckeNoise(Seed:= 1); (* 随机数函数*)x := x + 0.01*StreckeNoise.Num;END_IF;3.3.2 相关子程序A. FUNCTION_BLOCK FB_DeadTimeVAR_INPUTbInit : BOOL;dlyCycles : INT;fInVal : LREAL;END_VARVAR_OUTPUTfOutVal : LREAL;END_VARVARRingBuffer : ST_DeadTime;END_VARIF bInit THENDeadTimeRingBufferInit(ADR(RingBuffer));END_IFDeadTimeRingBufferPut(fInVal, ADR(RingBuffer));fOutVal := DeadTimeRingBufferGet(dlyCycles, ADR(RingBuffer));B. FUNCTION DeadTimeRingBufferInit : BOOLVAR_INPUTpRingBuffer : UDINT;END_VARVARi : INT;sRingBuffer : ST_DeadTime := (RingBufferPos := -1); END_VARMEMCPY(pRingBuffer, ADR(sRingBuffer), SIZEOF(sRingBuffer)); DeadTimeRingBufferInit := TRUE;C. FUNCTION DeadTimeRingBufferPut : BOOLVAR_INPUTRingBufferValue : LREAL;pRingBuffer : UDINT;END_VARVARsRingBuffer : ST_DeadTime;END_VARMEMCPY(ADR(sRingBuffer), pRingBuffer, SIZEOF(sRingBuffer));IF sRingBuffer.RingBufferPos = DeadTimeBufferLen THENsRingBuffer.RingBufferPos := 0;ELSEsRingBuffer.RingBufferPos := sRingBuffer.RingBufferPos + 1;END_IF;(* 写入缓冲器*)sRingBuffer.RingBuffer[sRingBuffer.RingBufferPos] := RingBufferValue; MEMCPY(pRingBuffer, ADR(sRingBuffer), SIZEOF(sRingBuffer)); DeadTimeRingBufferPut := TRUE;D. FUNCTION DeadTimeRingBufferGet : LREALVAR_INPUTdelay : INT;pRingBuffer : UDINT;END_VARVARLocalPos : INT;sRingBuffer : ST_DeadTime;END_VARMEMCPY(ADR(sRingBuffer), pRingBuffer, SIZEOF(sRingBuffer));IF sRingBuffer.RingBufferPos - delay < 0 THENLocalPos := DeadTimeBufferLen+sRingBuffer.RingBufferPos+1-delay;ELSELocalPos := sRingBuffer.RingBufferPos - delay;END_IF;(* 从缓冲器中读*)DeadTimeRingBufferGet := sRingBuffer.RingBuffer[LocalPos];MEMCPY(pRingBuffer, ADR(sRingBuffer), SIZEOF(sRingBuffer));E. TYPE ST_DeadTime :STRUCTRingBuffer : ARRAY[0..DeadTimeBufferLen] OF LREAL;RingBufferPos : INT;END_STRUCTEND_TYPEF. VAR_GLOBAL CONSTANTDeadTimeBufferLen : INT := 500; (* 1000 *)END_VAR3.3.3 主程序PROGRAM MAIN_SimuVAR(* 切换开关*)bStart : BOOL := TRUE;bOn : BOOL := TRUE;bSelSetpoint : BOOL;bInit : BOOL := TRUE;bTune : BOOL := TRUE;bManual : BOOL;bNoise : BOOL;bError : BOOL;iErrorId : E_ErrorCodes;fW : LREAL; (* 温度控制器设定*)fW1 : LREAL := 90; (* 主设定100 *)fW2 : LREAL := 50.0; (* 辅设定*)fY : LREAL; (* 控制值,温度控制器输出*) fX : LREAL; (* 实际值,仿真对象输出*)bSelParameterSet : BOOL := FALSE;bEnableSoftStart : BOOL := TRUE;bEnableRamping : BOOL := TRUE;(* 参数*)sControllerParameter : ST_ControllerParameter := (fYMin := 0,fYMax := 100,tPWMCycleTime := T#100MS ,fYManual := 20,bFilter := TRUE,tFilter := T#2S,fWMin := 0,fWMax := 200,fWStartUp := 40.0,tStartUp := T#20S,fWVeloPos := 1.0,fWVeloNeg := 1.0,bStartUpRamping := TRUE,fWStartUpVeloPos := 1.0,fWStartUpVeloNeg := 1.0,iMode := CTRLMODE_HEATING,dwAlarmSupp := 16#FF_FF_FF_FF,tCtrlCycleTime := T#100MS,tTaskCycleTime := T#10MS,fYTune := 100.0,iReactionOnFailure := TC_OnFailureStopController,TempLow := 5.0,TempLowLow := 10.0,TempHigh := 10.0,TempHighHigh := 25.0,TempAbsoluteHigh := 150.0,TempAbsoluteLow := 0.0,bEnablePreController := TRUE,bEnableZones := FALSE,bEnableCVFilter := TRUE,iFilterType := E_FilterType_FIRSTORDER,iControllerType := E_ControllerType_PID,(* 新添加项*)fTuneKp := 1.0,fTuneTn := 2.5,fTuneTv := 0.42,fTuneTd := 0.25 );sParaControlExternal : st_ParaController;fbT empController : FB_TempController;fbProcess : FB_Process;fbCtrlParameter : FB_CtrlParameter;END_VARIF bSelSetpoint THENfW := fW2;ELSEfW := fW1;END_IF;IF bStart THEN(* 仿真过程*)fbProcess(y := fbT empController.fYAnalog , (* 温度控制器的输出*)bInit := bInit ,bNoise := bNoise,Ta :=TIME_TO_LREAL(sControllerParameter.tTaskCycleTime)/1000.0,xOffset := 5.0 );fX := fbProcess.x; (* 仿真过程输出,温度调节器输入*)(* 启动控制器*)fbT empController(bOn := bOn,bInit := bInit,bTune := bTune,bManual := bManual,bSelSetpoint := bSelSetpoint,bSelCtrlParameterSet := bSelParameterSet,bEnableSoftStart := bEnableSoftStart,bEnableRamping := bEnableRamping,fW1 := fW1,fW2 := fW2,fX := fX,bOpenThermocouple := FALSE,bReverseThermocouple := FALSE,bBackVoltage := FALSE,bLeakage := FALSE,bShortCircuit := FALSE,bOpenCircuit := FALSE,sControllerParameter := sControllerParameter,sParaControllerExternal := fbCtrlParameter.sParaController);fY := fbTempController.fYAnalog; (* 温度控制器的输出,仿真对象的输入*) bError := fbTempController.bError;iErrorId := fbTempController.iErrorId;bInit := FALSE;ELSEbInit := TRUE;END_IF;。
企业sop标准化操作流程范例
企业sop标准化操作流程范例English Answer:Standard Operating Procedures (SOPs) are documented instructions that outline the steps to be followed for a specific task or process. They are designed to ensure that tasks are performed consistently and efficiently, reducing errors and improving quality. SOPs can cover a wide range of activities, from manufacturing processes to administrative tasks.Elements of an SOP.Title and Purpose: Clearly states the purpose of the SOP.Scope: Defines the range of activities covered by the SOP.Roles and Responsibilities: Outlines the roles andresponsibilities of individuals involved in the process.Materials and Equipment: Lists the materials and equipment necessary for the process.Safety Procedures: Describes any safety precautions that need to be taken.Step-by-Step Instructions: Provides detailed instructions on how to perform the task or process.Quality Control: Specifies the quality standards that must be met.Documentation: Outlines the documentation required for the process.Review and Approval: Indicates who is responsible for reviewing and approving the SOP.Benefits of SOPs.Consistency: Ensure that tasks are performed in a standardized manner.Efficiency: Streamline processes and reduce errors.Training: Provide clear instructions for new employees.Compliance: Meet regulatory requirements and industry standards.Continuous Improvement: Facilitate process improvement by identifying areas for improvement.Best Practices for Creating SOPs.Involve stakeholders: Gather input from all relevant individuals.Use clear and concise language: Avoid technical jargon.Provide visual aids: Include diagrams, flowcharts, or checklists to enhance comprehension.Test and validate: Conduct trials to ensure the SOP is effective.Review and update regularly: Keep SOPs up-to-date with changes in processes or regulations.Examples of SOPs.Manufacturing processes: Assembly instructions,quality control procedures.Laboratory procedures: Sample preparation, analysis methods.Administrative tasks: Document management, expense reimbursement.Safety protocols: Emergency response plans, hazardous material handling.中文回答:标准操作程序 (SOP) 是针对特定任务或流程编写的文档化说明。
basic程序设计示例

basic程序设计示例Basic程序设计示例在计算机科学领域中,编程语言是实现算法和解决问题的工具。
Basic(Beginner's All-purpose Symbolic Instruction Code)是一种广泛应用于初学者的编程语言,它简单易学,适合初学者入门。
在本文中,我们将介绍一些基本的Basic程序设计示例,以帮助读者理解这种编程语言的基本概念和用法。
第一个示例是一个简单的Hello World程序。
在Basic中,可以使用PRINT语句来输出文本信息。
以下是一个Hello World程序的示例代码:```10 PRINT "Hello, World!"20 END```在这个程序中,第10行的PRINT语句用于输出文本信息"Hello, World!",而第20行的END语句用于结束程序的执行。
当我们运行这个程序时,屏幕上将显示出"Hello, World!"这个信息。
接下来,我们将介绍一个基本的计算器程序。
在Basic中,可以使用LET语句来进行数学运算。
以下是一个计算器程序的示例代码:```10 PRINT "请输入两个数:"20 INPUT A, B30 LET SUM = A + B40 LET DIFFERENCE = A - B50 LET PRODUCT = A * B60 LET QUOTIENT = A / B70 PRINT "和:", SUM80 PRINT "差:", DIFFERENCE90 PRINT "积:", PRODUCT100 PRINT "商:", QUOTIENT110 END```在这个程序中,第10行的PRINT语句用于提示用户输入两个数,而第20行的INPUT语句用于获取用户输入的数值并将其存储在变量A 和B中。
简单绘图程序示例

简单绘图程序示例
如果您想要一个简易的绘图程序,我推荐您使用Python 的turtle 模块。
以下是一个简单的例子:
import turtle
# 创建一个新的绘图窗口
win = turtle.Screen()
# 创建一个新的海龟实例
my_turtle = turtle.Turtle()
# 让海龟向前移动100个像素
my_turtle.forward(100)
# 让海龟向右转90度
my_turtle.right(90)
# 再让海龟向前移动100个像素
my_turtle.forward(100)
# 让海龟向右转90度
my_turtle.right(90)
# 再让海龟向前移动100个像素
my_turtle.forward(100)
# 让海龟向右转90度
my_turtle.right(90)
# 再让海龟向前移动100个像素
my_turtle.forward(100)
# 让窗口等待用户关闭它
turtle.done()
这个程序将会创建一个简单的正方形。
您可以根据需要修改这个程序,例如改变移动的距离,改变转动的角度,或者添加更多的命令来绘制更复杂的图形。
TSS示例程序

设置公钥数据,密钥算法,密钥的素数个数和 密钥的加密机制
生成AIK密钥和身份证书
Tspi_TPM_CollateIdentityReq
uest函数来创建一个新的AIK密 钥及证书签名请求包
含有AIK的公钥,还有可信平台的 签注证书、平台证书和验证证书 生成随机数作为会话密钥,对证书 请求数据采用3DES(本例中采用 该加密算法)进行加密 会话密钥则采用CA的公钥加密以 保证其机密性
以上软件安装完毕后,执行以下3个操作
TPM模拟环境的搭建
(1)启动Tpm_emulator:打开一个新的 终端,在终端中输入命令:
#modprobe tpmd_dev #rm /var/run/tpm/tpmd_socket:0 #tpmd –fd
TPM_Emulator启动成功
(2)启动TSS软件栈
获取私有CA密钥
发送证书签发请求包 关闭TSS上下文
生成AIK密钥和证书签发请求
Tspi_Context_Create创建一个新的TSS上下文对象 Tspi_Context_Connect函数来连接到刚创建的TSS上下文 Tspi_Context_GetTpmObject函数来获取TPM对象 Tspi_Context_LoadKeyByUUID函数来加载根密钥以获得授权 Tspi_GetPolicyObject函数来获取SRK的策略对象 Tspi_Policy_SetSecret函数来设置SRK的口令 Tspi_Context_CreateObject函数创建AIK对象
生成AIK密钥和身份证书
调用OpenSSL库来获取隐私CA的密钥 将该OpenSSL的CA密钥转换成TSS密钥对象
get_tss_key_size函数来获取RSA密钥的比特 长度 Tspi_Context_CreateObject函数来创建一个 TSS密钥对象
ch583 例子程序
ch583 例子程序
例子程序是指用于展示、演示或说明特定功能或概念的小型程序。
它通常用于
教学、学习和理解编程语言、库或框架的用法。
下面是关于ch583例子程序的描述:
ch583例子程序是一个基于编程语言ch583的示例程序。
ch583是一个用于开发物联网设备的嵌入式编程语言。
它具有简单易学、高效、灵活的特点,广泛应用于物联网设备的开发中。
这个例子程序演示了如何使用ch583编写一个简单的温度传感器应用。
代码示
例中通过读取传感器数据并将其显示在终端上,展示了ch583如何与传感器进行交互,以及如何处理和显示传感器数据。
在例子程序中,首先需要引入ch583的相关库文件,并进行初始化设置。
接下来,利用ch583提供的API函数,读取传感器的温度数据,并将其存储在变量中。
然后,通过使用ch583提供的打印函数,将温度数据显示在终端上。
最后,清理资源并结束程序的执行。
这个例子程序简单明了,旨在帮助初学者快速理解和上手使用ch583编程语言。
通过阅读和运行这个例子程序,开发者可以更深入地了解ch583的语法和功能,快速上手编写自己的物联网设备应用。
总结而言,ch583例子程序是一个展示如何使用ch583编写物联网设备应用的
示例程序。
它通过演示读取传感器数据并在终端上显示的过程,帮助开发者理解和应用ch583编程语言。
该例子程序对于初学者来说具有指导意义,可以为他们构建更复杂的物联网应用奠定基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
;如果B<0(商是负数),则需要变号
;保存商
除法运算
被除数 16385
除数 512
商(十六进 商(十进制) 制) 0xC020 32 -2
66*32768/100(0.66) -33*32768/100(-0.33) 0xFFFE
表4-4 乘法指令
表4-7 专用指令
返回本节
表4-19 混合程序控制指令
SUBC Smem,src
;(src)-(Smem)《15→ALU输出
;如果ALU输出》0,则(ALU输出)《1+1 →src ;否则(src) )《1 →src
下面考虑:当被除数≥除数,商为整数 编写0.66 ⁄ (-0.33)程序段
除法运算
.bss num.1 .bss den.1 .bss quot.1 .data .word 66*32768/100 .word -33*32768/100 .text STM #num,AR1 RPT #1 MVPD table,*AR1+ LD @den,16,A MPYA @num ABS STH LD ABS RPT SUBC XC NEG STL A A,@den @num,16,A A #15 @den,A 1,BLT A A,@quot
;x1,x2,x3,x4,x5 ;插入0个等待状态 ;设置堆栈指针 ;AR1指向x
/*
zh1.cmd
*/
MEMORY { PAGE 0: EPROM: org=0e00H VECS: org=0FF80H PAGE 0: SPRAM: org=0060H DARAM: org=0080H } SECTIONS { .text :>EPROM .data :>EPROM .bss :>SPRAM STACK :>DARAM .vectors :>VECS }
除法运算
双操作数乘法
求y=mx+b,单操作数与双操作数实现方法比较如下:
单操作数方法 LD MPY ADD STL @m,T @x,A @b,A A,@y 双操作数方法 MPY ADD STL *AR2,*AR3,A @b,A A,@y
table:
;0.66 ;-0.33
(16348) (512)
start:
; 传送2个数据至分子、分母单元 ;将分母移到累加器A(32~16) ;(num)*A(32~16) →B,获取商的符号 ;(在累加器B中) ;分母取绝对值 ;分母绝对值存回原处 ;分子→ A(32~16) ;分子取绝对值 ;16次减法重复操作,完成除法
LT,AR1 loop,TC
堆栈的使用方法
程序中要用到堆栈,则先必须进行设置,方法如下: size .set 100 stack .usect “STK”,size STM #stack+size,SP
上述语句在数据RAM空间开辟一个堆栈区。前两句在数据RAM中自定义一个名为STK 的保留空间,共100个单元。第3句将这个保留空间的高地址(#stack+size)赋给SP, 作为栈底。至于自定义未初始化段STK究竟定位在数据RAM中什么位置,应当在链接 器命令文件中规定。
STACK
:堆栈的设置
start:
;将数组每个元素初始化为2
;B←10H,为每个元素加1作准备 ;BRC←04H
next end:
初始化数组x[5]={1,2,3,4,5} .title “zh9.asm” .mmregs STACK .usect “STACK”,10H :堆栈的设置 .bss x,5 .data table: .word 1,2,3,4,5 .def start .text start: STM #x,AR1 RPT #4 MVPD table,*AR1+ end: B end .end 重复执行MVPD指令,实现程序存储器至数据存储器的数据传输,在系统初始化过程中非 常有用。可以将数据表格与文本一道驻留在程序存储器中,复位后将数据表格传送到数据 存储器中。从而不需要配置数据ROM,降低系统成本。
65535
...
加减法运算和乘法运算
计算Z=X+Y-W STACK
table : start:
end: SUMB:
.title “zh3.asm” .mmregs .usect “STACK”,10H .bss x,1 .bss y,1 .bss w,1 .bss z,1 .def start .data .word 10,26,23 .text STM #0,SWWSR STM #STACK+10H,SP STM #x,AR1 RPT #2 MVPD table,*AR1+ CALL SUM B end LD @x,A ADD @y,A SUB @w,A STL A,@z RET .end
i=1
4
;设置堆栈指针 ;AR1指向a ;移动8个数据 ;从程序存储器到数据存储器 ;调用SUM子程序 ;子程序执行
在上例中4项乘积ai xi (i 1, 2,3, 4)中找出最大值,并存放在累加器A中。
STACK
table:
start:
end:
.title .mmregs .usect .bss .bss .bss .def .data .word .word .text STM STM STM RPT MVPD CALL B
:堆栈的设置 ;为变量分配4个字的存储空间
;m,x,b ;插入0个等待状态 ;设置堆栈指针 ;AR1指向m ;移3个数据
对数组x[5]每个元素加1 start: .bss LD STM STM RPTB ADD STH LD x,5 #1,16,B #4,BRC #x,AR4 next-1 *AR4,16,B,A A,*AR4+ #0,B
数据存储器 0 ... stack SP→ 可用栈区 最后用的单元 已用栈区
}
.set 100 .usect “STK”,size STM #stack+size,SP STK 堆栈的用法: 压入堆栈:SP先减1后,再将数据压入堆栈中 弹出操作:数据弹出后,再将SP加1
堆栈的设置 size stack
图7-9 DSP定点运算中小数的表示
计算y= x i
i=1
5
STACK
table: start:
end: SUM:
loop:
.title .mmregs .usect .bss .bss .def .word .text STM STM STM RPT MVPD LD CALL B STM STM ADD BANZ STL RET .end
:堆栈的设置 ;为变量分配4个字的存储空间
;x,y,w ;插入0个等待状态 ;设置堆栈指针 ;AR1指向x ;移3个数据
计算y=mx+b STACK
table : start:
end: SU:
.title “zh4.asm” .mmregs .usect “STACK”,10H .bss m,1 .bss x,1 .bss b,1 .bss y,1 .def start .data .word 3,15,20 .text STM #0,SWWSR STM #STACK+10H,SP STM #m,AR1 RPT #2 MVPD table,*AR1+ CALL SU B end LD @m,T MPY @x,A ADD @b,A STL A,@z RET .end
STACK
table;
start:
end:
/* zh10.cmd */ MEMORY { PAGE0: EPROM: VECS: PAGE1: SPRAM: DARAM: } SECTIONS { .vectors:> .text:> .data:> .bss:> STACK:> }
org=0E00H org=0FF80H org=00060H org=00090H
“zh6.asm” “STACK”,10H a,4 x,4 y,4 start 1,2,3,4 8,6,4,2 #0,SWWSR #STACK+10H,SP #a,AR1 #7 table,*AR1+ SUM end #a,AR3 #x,AR4 A,#3 *AR3+,*AR4+,A A,@y
计算y= a i x i
“zh7.asm”
“STACK”,10H a,4 x,4 y,4 start 1,5,3,4 8,6,7,2 #0,SWWSR #STACK+10H,SP #a,AR1 #7 table,*AR1+ MAX end
;设置堆栈指针 ;AR1指向a
MAX:
loop
STM STM STM LD MPY LD MPY MAX BANZ STL RET .end
数据存储器→数据存储器
编写一段程序,将数据存储器中数组x[20]中的数据复制到数组y[20]中 .title “zh10.asm” .mmregs .usect “STACK”,10H :堆栈的设置 .bss x,20 .bss y,20 .data .word 1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20 .def start .text STM #x,AR1 RPT #19 MVPD table,*AR1+ STM #x,AR2 STM #y,AR3 RPT #19 MVDD *AR2+,*AR3+ B end .end
“zh1.asm”
“STACK”,10H x,5 y,1 start 10,20,3,4,5 #0,SWWSR #STACK+10H,SP #x,AR1 #4 table,*AR1+ #0,A SUM end #x,AR3 #4,AR2 *AR3+,A loop,*AR2A,@y ;堆栈的设置 ;为变量分配6个字的存储空间