GPS控制网等级分类和规范
GPS控制网等级

GPS控制网等级1、控制网等级及其用途按照国家标准《全球定位系统(GPS)测量规范》(GB/T13814-2009),GPS测量按其精度分为A、B、C、D、E五级。
其中:1)A级GPS网由卫星定位连续运行基站构成,用于建立国家一等大地控制网,进行全球性的地球动力学研究、地壳变形测量和卫星精密定轨测量。
2)B级GPS测量主要用于建立国家二等大地控制网,建立地方或者城市坐标基准框架、区域性的地球动力学研究、地壳变形测量和各种精密工程测量等。
3)C级GPS测量用于建立三等大地控制网,以及区域、城市及工程测量的基本控制网等。
4)D级GPS测量用于建立四等大地控制网。
5)E级GPS测量用于测图、施工等控制测量。
2、精度要求3、卫星定位连续运行基准站网的布设1)布设原则CORS依据管理形式、任务要求和应用范围,划分为国家基准站网、区域基准站网和专业应用站网。
(1)国家基准站网国家基准站网的布设应顾及社会发展、经济建设和自然条件因素。
在即将实施的国家大地基准基础设施建设项目中,我国将在全国范围内建设360个地基稳定、分布均匀的连续运行基准站(其中:新建150个、改造60个、直接利用已有的站150个)。
(2)区域基准站网区域基准站网是指在省、市地区建立的连续运行基准站网,主要构成高精度、连续运行的区域坐标基准框架,为省、市区域提供不同精度的位置服务和相关信息服务。
区域基准站网的布设按实时定位精度而选择基准站间的距离,当采用网络RTK技术满足厘米级实时定位,其区域基准站布设间距不应超过80KM。
(3)专业应用站网专业应用站网是由专业部门或者机构根据专业需求建立的基准网站,用于开展专业信息服务。
它的布设间距主要根据专业需求,当满足实时定位分米级要求,则基准站布设间距一般在100~150KM之间。
2)基准站设计与选址基准站设计时应根据基准站网布设原则,在图上标出设计基准站站址,同时标明基准站及其周围地区的主要地质构造、地震活动,与设计有关的地震台、人卫站,以及可以利用的GPS、大地测量网站点。
GPS控制点等级

3。
1观测时段observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3。
2同步观测simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
3.3同步观测环simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环. 3。
4独步观测环independent observation loop由非同步观测获得的基线向量构成的闭合环。
3。
5数据剔除率percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
3。
6天线高antenna height观测时接收机相位中心至测站中心标志面的高度。
3.7参考站Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8流动站roving station在参考站得一定范围内流动作业的接收机所设立的测站。
3。
9观测单元observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3。
10世界大地坐标系1984(GPS84)World Geodetic System 1984 由美国国防部在与WGS72相应的精密星历NSWC-9Z-2基础上,采用1980大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系。
3。
11国际地球参考框架ITRF YY,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
3。
12GPS静态定位测量static GPS positioning通过在多个测站上进行若干个时段同步观测,确定测站之间相对位置的GPS定位测量。
GPS控制网等级分类和规范标准

1 分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4级别 B C D、E单频/双频双频/全波长双频/全波长双频/单频观测量至少有L1、L2载波相位L1、L2载波相位L1载波相位同步观测机数≥4 ≥3 ≥2观测:表1.5级别级别B C D E卫星截止高度角/度10 15 15 15同时观测有效卫星数≥4 ≥4 ≥4 ≥4有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
GPS控制测量各种要求规范限差
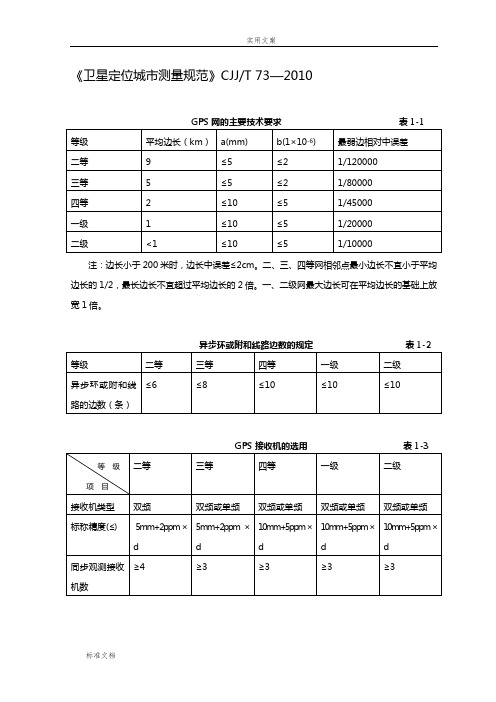
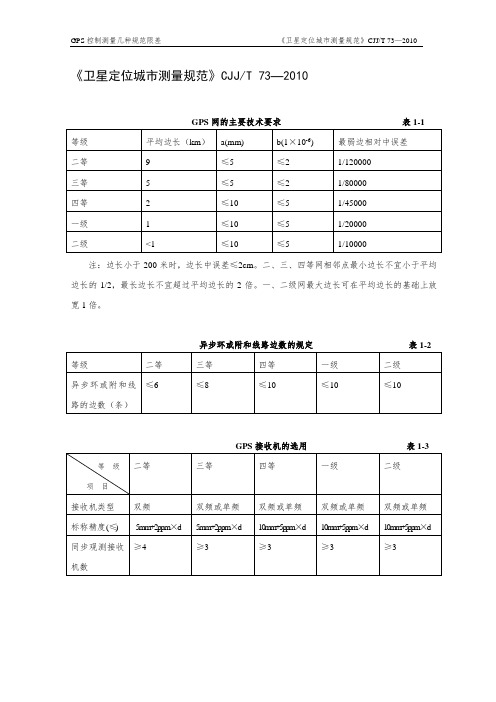
《卫星定位城市测量规范》CJJ/T 73—2010注:边长小于200米时,边长中误差≤2cm。
二、三、四等网相邻点最小边长不宜小于平均边长的1/2,最长边长不宜超过平均边长的2倍。
一、二级网最大边长可在平均边长的基础上放宽1倍。
各项限差规定 σ())((22bd a +=σ采用表1-1加乘常数) 同步环闭合差限差σω53x ≤, σω53y ≤, σω53z ≤, σω53≤ 同步环只计算三边同步环,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差应满足下列要求(或者进行已知点检查,已知点点位变化相对于约束点的边长相对中误差不应低于表1-1规定的上一等级控制网中最弱边相对中误差)σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤))((22bd a +=σd 按照基线边长计算《工程测量规范》GB50026-2007控制网测量中误差m ≤σ⎥⎦⎤⎢⎣⎡=n WW N 31m ,N 为控制网中异步环的个数,n 为异步环边数,W 为异步环全长闭合差。
各项限差规定σ ())((22bd a +=σ采用表2-1加乘常数) 同步环闭合差限差σω5n x ≤, σω5n y ≤, σω5n z ≤, σω5n 3≤ n —同步环的边数,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,控制网的最弱边边长相对中误差,应满足表2-1中相应等级的规定。
公路全球定位系统(GPS)测量标准规范
公路全球定位系统(GPS)测量标准规范1 总则1.0.1 为规定利⽤全球定位系统﹙Global Positioning System, 缩写为 GPS﹚建⽴公路⼯程GPS 测量控制⽹的原则﹑精度和作业⽅法,特制定本规范。
1.0.2 本规范是依据《公路勘测规范》﹙JTJ 061),并参照《全球定位系统(GPS)测量规范》(CH 2001-92)的有关规定,在收集﹑分析﹑研究和总结经验的基础上制定的。
1.0.3 本规范适⽤于新建和改建公路⼯程项⽬的各级GPS控制⽹的布设与测量。
1.0.4 采⽤全球定位系统测量技术建⽴公路平⾯控制⽹时,应根据《公路勘测规范》(JTJ 061)中规定的平⾯控制测量的等级﹑精度等确定相应的GPS控制⽹的等级。
1.0.5 GPS测量采⽤WGS-84⼤地坐标系。
当公路⼯程GPS控制⽹根据实际情况采⽤1954年北京坐标系﹑1980西安坐标系或抵偿坐标系时,应进⾏坐标转换。
各坐标系的地球椭球基本参数﹑主要⼏何和物理常数见附录A.⾼程系统根据实际情况可采⽤1956年黄海⾼程系或1985国家⾼程基准.1.0.6 GPS测量时间系统为协调世界时(UTC). 在作业过程中,附录D "GPS观测⼿薄" 中的开﹑关机时间可采⽤北京时间记录. 1.0.7 GPS接收机及附属设备均按有关规定定期检测.1.0.8 GPS控制测量应按有关规定对全过程进⾏质量控制.1.0.9 在提供GPS控制测量成果资料时,应执⾏保密制度中的有关规定.2 术语2.0.1 基线Baseline两测量标志中⼼的⼏何连线。
2.0.2 观测时段 Observation sessionGPS 接收机在测站上从开始接收卫星信号进⾏观测到停⽌观测的时间长度。
2.0.3 同步观测 Simultaneous observation两台或两台以上GPS接收机同时对⼀卫星进⾏的观测。
2.0.4 同步观测环 Simultaneous observation三台或三台以上GPS接收机同步观测所获得的基线向量构成的闭合环。
GPS_E级网规范(新)

附录A E级GPS控制网有关技术要求(参考)一、控制网执行的技术标准1、全球定位系统(GPS)测量规范(GB/T 18314—2001),中华人民共和国国家标准;2、《国家三、四等水准测量规范》(GB12898-1991),中华人民共和国国家标准;3、技术设计书。
二、使用仪器测量采用的GPS接收机型号及其标称精度。
三、布网方案1、布网要求GPS网相邻点间基线中误差 按下式计算:式中a(mm)为固定误差;b(ppm)为比例误差系数;d(km)为相邻点间的距离。
GPS-E级网的主要技术要求应符合表1规定。
相邻点最小距离应为平均距离的1/2~1/3;最大距离应为平均距离的2~3倍。
2、布网原则与网形设计(1)GPS网应根据测区实际需要和交通状况进行设计。
GPS网的点与点间不要求每点通视,但考虑常规测量方法加密时的应用,每点应有1~2个通视方向。
(2)在布网设计中应顾及原有测绘成果资料以及各种大比例尺地形图的沿用,对凡符合GPS-E级网布点要求的旧有控制点,应充分利用其标石。
(3)GPS网应由若干个独立观测环构成,也可采用附合线路构成。
E级GPS 网中每个闭合环或附合线路中的边数应符合表2的规定。
非同步观测的GPS基线向量边,应按所设计的网图选定,也可按软件功能自动挑选独立基线构成环路。
(4的原有控制点联测,联测总点数不得少于3个。
(5)为了求得GPS网点正常高,应进行水准测量的高程联测,高程联测采用等级水准测量方法进行,联测的GPS-E级控制点且应均匀分布于网中。
四、选点与标石埋设1、选点在了解任务、目的、要求和测区自然地理条件的基础上,进行现场踏勘,最后进行选点。
选点应符合下列要求:(1)点位的选择应符合技术设计要求,并有利于其它测量手段进行扩展与联测;(2)点位的基础应坚实稳定,易于长期保存,并应有利于安全作业;(3)点位应便于安置接收设备和操作,视野应开阔,视场内周围障碍物的高度角一般应小于15°;(4)点位应远离大功率无线电发射源(如电视台、微波站等),其距离不得小于200m,并应远离高压输电线其距离不得小于50m,以避免周围磁场对卫星信号的干扰;(5)点位附近不应有对电磁波反射(或吸收)强烈的物体,以减少多路径效应的影响;(6)交通应便于作业,以提高作业效率;(7)应充分利用符合上述要求原有的控制点及其标石,但利用旧点时应检查旧点的稳定性、完好性,符合要求方可利用;(8)选好点后应按合理的方法给GPS点编号。
GPS网的布设

相邻点距离 (km) 100~2000 15~250 5~40 2~15 1~10
• A级网一般为区域或国家框架网、区域动力学 网;B级网为国家大地控制网或地方框架网;C 级网为地方控制网和工程控制网;D级网为工 程控制网;E级网为测图网。
• 美 国 联 邦 大 地 测 量 分 管 委 员 会 ( Federal Geodetic Control Subcommittee-FGCS)在1988 年公布的GPS相对定位的精度标准中有一个AA 级的等级,其要求固定误差≤3mm,比例误差 ≤0.01ppm,此等级的网一般为全球性的坐标 框架和地球动力学测量。
• 适用范围:C,D。
4.同步图形扩展式的布网
• 形式:多台接收机在不同测站上进行同步观测,在完 成一个时段的同步观测后,又迁移到其它的测站上进 行同步观测,每次同步观测都可以形成一个同步图形, 在测量过程中,不同的同步图形间一般有若干个公共 点相连,整个GPS网由这些同步图形构成。
• 一个由n台仪器测定的同步图形中:
• 优点:效率高。 • 缺点:图形强度弱 • 适用范围:D,E。
四、同步图形的连接方式
• 点连式 • 边连式 • 网连式 • 混连式
1. 点连式
• 形式:相邻的同步图形间只通过一个公共点相连。 • 优点:作业效率高,图形扩展迅速。 • 缺点:图形强度低,如果连接点发生问题,将影响到
后面的同步图形。
• 根据精度划分
1. 精度指标
:网中相邻点弦长精度(mm); a:固定误差(mm); b:比例误差(ppm); D:相邻点间的距离(km)。
2. GPS网的等级
测量 分类
A B C D E
固定误差
a (mm)
≤5 ≤8 ≤10 ≤10 ≤10
GPS控制测量(CP0,CPⅠ,CPII) PPT
( CP0, CPⅠ,CPⅡ)
中南大学
一、三网合一
➢ 1、目的 为统一高速铁路工程测量的技术要求,保证其
测量成果质量满足勘测、施工、运营维护各个阶段 测量的要求,适应高速铁路工程建设和运营管理的 需要。
➢ 2、主要技术要求 ❖ 高速铁路工程测量平面坐标系应采用工程独立坐标系统,
在对应的线路轨面设计高程面上坐标系统的投影长度变 形值不宜大于10mm/km。
❖ 用作CPⅠ控制网约束平差的约束点间边长相对 中误差应满足<规范>的规定;
❖ 约束平差中基线向量各分量改正数与无约束平 差同一基线改正数较差的绝对值应满足下式要 求,并提供约束平差后相应坐标系的空间直角坐 标,基线矢量及其改正数和其精度信息
dVVx 2
dVVy 2
dVVz 2
四、CPⅡ 控制测量
Wx 3 n
Wy 3 n Wz 3 n
Ws 3 n
4、CPⅠ控制网平差及坐标转换应符合下列规定
❖ 无约束平差中基线向量各分量的改正数绝对值应满足下 式的要求,并提供无约束平差WGS-84 坐标系中的空间 直角坐标,基线矢量及其改正数和其精度信息
VVx 3 VVy 3 VVz 3
其中,在计算σ时,取a=5mm,b=1mm/Km,d取各 时段基线长度平均值。
1、CPⅡ控制测量原则
❖ CPⅡ控制网宜在定测阶段完成; ❖ 采用三等GPS测量或三等导线测量方法施测;
➢ 2、观测要求
➢பைடு நூலகம்3、数据处理
什么是单基线解?什么是多基线解?
公式如何理解?
公式3.2.8-2中:
➢ 4、CP0复测要求
三、CPⅠ 控制测量
1、CPⅠ控制测量原则 ❖ CPⅠ控制网宜在初测阶段建立,困难时应在定
GPS控制网等级分类和规范标准

1 分类方法一:A、B、C、D、E级1.1参考规《全球定位系统GPS测量规-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4级别 B C D、E单频/双频双频/全波长双频/全波长双频/单频观测量至少有L1、L2载波相位L1、L2载波相位L1载波相位同步观测机数≥4 ≥3 ≥2观测:表1.5级别级别B C D E卫星截止高度角/度10 15 15 15同时观测有效卫星数≥4 ≥4 ≥4 ≥4有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
GPS控制测量各种规范限差
《卫星定位城市测量规范》CJJ/T 73—2010GPS网的主要技术要求表1-1注:边长小于200米时,边长中误差≤2cm。
二、三、四等网相邻点最小边长不宜小于平均边长的1/2,最长边长不宜超过平均边长的2倍。
一、二级网最大边长可在平均边长的基础上放宽1倍。
异步环或附和线路边数的规定表1-2GPS 测量各等级作业的基本技术要求 表1-4各项限差规定 σ())((22bd a +=σ采用表1-1加乘常数) 同步环闭合差限差σω53x ≤, σω53y ≤, σω53z ≤, σω53≤ 同步环只计算三边同步环,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差应满足下列要求(或者进行已知点检查,已知点点位变化相对于约束点的边长相对中误差不应低于表1-1规定的上一等级控制网中最弱边相对中误差)σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤))((22bd a +=σd 按照基线边长计算《工程测量规范》GB50026-2007GPS 网的主要技术要求 表2-1控制网测量中误差m ≤σ⎥⎦⎤⎢⎣⎡=n WW N31m ,N 为控制网中异步环的个数,n 为异步环边数,W 为异步环全长闭合差。
GPS控制点等级要点

3.1观测时段observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3.2同步观测simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
3。
3同步观测环simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
3。
4独步观测环independent observation loop由非同步观测获得的基线向量构成的闭合环。
3.5数据剔除率percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
3.6天线高antenna height观测时接收机相位中心至测站中心标志面的高度。
3。
7参考站Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8流动站roving station在参考站得一定范围内流动作业的接收机所设立的测站。
3.9观测单元observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3。
10世界大地坐标系1984(GPS84)World Geodetic System 1984 由美国国防部在与WGS72相应的精密星历NSWC—9Z-2基础上,采用1980大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系.3.11国际地球参考框架ITRF YY,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
3.12GPS静态定位测量static GPS positioning通过在多个测站上进行若干个时段同步观测,确定测站之间相对位置的GPS定位测量。
GPS控制网等级分类和规范

GPS控制⽹等级分类和规范1 分类⽅法⼀:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2 界⾯显⽰参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS⽹点位应均匀分布,相邻点间距离最⼤不宜超过⽹平均间距的2倍。
接收机的选⽤:表1.4观测:表1.5数据处理(1)外业数据检核1)B级GPS⽹基线外业预处理和C、D、E级GPS⽹基线处理,复测基线的长度较差ds应满⾜公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫⽶2)B、C、D、E级GPS⽹基线测量中误差σ采⽤外业测量时使⽤的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS⽹同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独⽴的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫⽶,计算按12.2.5规定执⾏。
对于四站以上同步观测时段,在处理完个边观测值后,应检查⼀切可能的三边环闭合差。
4) B、C、D、E级GPS⽹外业基线的处理结果,其独⽴闭合环或附和路线坐标闭合差W S和各坐标分量闭合差应满⾜公式(1.3)的规定。
≦3σ≦3σ≦3σ≦3σ(1.3)W S=n为闭合环数。
(2)基线向量解算基本要求(略参考规范12.3.3节)2 分类⽅法⼆:城市⼆、三、四等和⼀、⼆级城市或⼯程GPS按相邻点的平均距离和精度划分为⼆、三、四等和⼀、⼆级。
2.1参考规范《全球定位系统城市测量技术规范-1997》2.2 界⾯显⽰参数2.3 划分标准1)各等级GPS⽹相邻点间弦长精度应按公式2.1计算σ=(2.1)式中σ----标准差(基线向量的弦长中误差mm);a-----固定误差(mm);b-----⽐例误差系数(1X10-6);d-----相邻点间的距离(km)。
GPS控制网等级分类

1分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2界面显示参数表1.5有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60% 注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ(1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:对于四站以上同步观测时段,在处理完个边观测值后,应检查一切可能的三边环闭合差。
和各坐4)B、C、D、E级GPS网外业基线的处理结果,其独立闭合环或附和路线坐标闭合差WS标分量闭合差应满足公式(1.3)的规定。
≦3σ≦3σ≦3σ≦3σ(1.3)=n为闭合环数。
WS(2)基线向量解算2分类方法二:城市二、三、四等和一、二级城市或工程GPS按相邻点的平均距离和精度划分为二、三、四等和一、二级。
2.1参考规范《全球定位系统城市测量技术规范-1997》2.2界面显示参数表2.1固定误差需要输入比例误差系数需要输入最弱边相对中误差平均距离同步环坐标分量相对闭合差同步环线全长相对闭合差2.3划分标准1)各等级GPS网相邻点间弦长精度应按公式2.1计算σ=(2.1)式中σ----标准差(基线向量的弦长中误差mm);a-----固定误差(mm);b-----比例误差系数(1X10-6);d-----相邻点间的距离(km)。
GPS控制网等级分类与规范标准[详]
![GPS控制网等级分类与规范标准[详]](https://img.taocdn.com/s3/m/8aa0287ced630b1c59eeb599.png)
的较差(d V△X 、d V△Y 、d V△Z)应符合下式要求:
dV△X≦2σ
dV△y≦2σ
dV△z≦2σ
()
当超限时,可认为作为约束的已知坐标、距离,已知方位与 GPS 网不兼容,应采用软件
提供的或人为的方法剔除某些误差较大的约束值,直至符合上式要求。
3 分类方法三:公路二、三、四等和一、二级
公路二等、三等、四等、一级、二级
四等 2
≤10 ≤10
1/45000
一级 1
≤10 ≤10
1/20000
二级 <1
≤15 ≤20
1/10000
注:当边长小于 200m 时,边长中误差小于 20mm。
3)布网原则
接收机选择,观测基本技术要求(略),参考规范六七章。
闭合环或附和路线边数的规定
等级
二等 三等 四等 一级 二级
闭合环或附和路线的边数 ≤6 ≤8 ≤10 ≤10 ≤10
坐标基准框架,为省、市区域提供不同精度的位置服务和相关信息服务。区域基准站网的布设
按实时定位精度而选择基准站间的距离,当采用网络 RTK 技术满足厘米级实时定位,其区域基 准站布设间距不应超过 80KM。 (3)专业应用站网 专业应用站网是由专业部门或者机构根据专业需求建立的基准网站,用于开展专业信息服务。
3、卫星定位连续运行基准站网的布设 1)布设原则
CORS 依据管理形式、任务要求和应用范围,划分为国家基准站网、区域基准站网和专业应用 站网。
(1)国家基准站网 国家基准站网的布设应顾及社会发展、经济建设和自然条件因素。在即将实施的国家大地基准
基础设施建设项目中,我国将在全国范围内建设 360 个地基稳定、分布均匀的连续运行基准站 (其中:新建 150 个、改造 60 个、直接利用已有的站 150 个)。 (2)区域基准站网 区域基准站网是指在省、市地区建立的连续运行基准站网,主要构成高精度、连续运行的区域
GPS控制点等级

3.1观测时段observation session测站上开始接收卫星信号到停止接受,连续观测的时间间隔称为观测时段,简称时段。
3.2同步观测simultaneous observation两台或两台以上接收机同时对一组卫星进行的观测。
3.3同步观测环simultaneous observation loop三台或三台以上接收机同步观测所获得的基线向量构成的闭合环。
3.4独步观测环independent observation loop由非同步观测获得的基线向量构成的闭合环。
3.5数据剔除率percentage of data rejection同一时段中,删除的观测值个数于获得的观测值总数的比值。
3.6天线高antenna height观测时接收机相位中心至测站中心标志面的高度。
3.7参考站Reference station在一定的观测时间内,一台或几台接收机分别固定在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动设站作业,这些固定测站就成为参考站。
3.8流动站roving station在参考站得一定范围内流动作业的接收机所设立的测站。
3.9观测单元observation unit快速静态测量定位时,参考站从开始至停止接收卫星信号连续观测的时间段。
3.10世界大地坐标系1984(GPS84) World Geodetic System 1984由美国国防部在与WGS72相应的精密星历NSWC-9Z-2基础上,采用1980大地参考数和BIH1980.0 系统定向所建立的一种地心坐标系。
3.11国际地球参考框架ITRF YY,International Terrestrial Reference Frame由国际地球自转服务局推荐的以国际参考子午面和国际参考极为定向基准,以LERS YY天文常数为基础所定义的一种地球参考系和地心(地球)坐标。
3.12GPS静态定位测量static GPS positioning通过在多个测站上进行若干个时段同步观测,确定测站之间相对位置的GPS定位测量。
全球定位系统(gps)测量规范

全球定位系统(gps)测量规范1.全球定位系统(gps)测量范围本标准规定利用全球定位系统(GPS)按静态、快速静态定位原理,建立测量控制网(简称(GPS)控制网)的原则、等级划分和作业方法。
本标准适用于国家和局部GPS控制网的设计、布测和数据处理。
2.坐标系和时间系统2.1:坐标系2.1.1:GPS测量采用广播星历时,其相应坐标系为世界大地坐标系WGS84。
该坐标系的地球椭圆基本参数以及主要几何和物理常数见附录A(标准的附录)。
GPS测量采用精密星历时,其坐标系为相应历元的国际地球参考框架ITRFYY。
当换算为大地坐标时,可采用与WGS84相同的地球椭球基本参数以及主要几何和物理常数。
2.1.2:当要求提供1980西安坐标系或其他参考坐标系时,可按坐标转换等方法求得这些坐标系的坐标。
当要求提供1985国家高程基准或其他高程系高程时,可按高程拟合、大地水准面精化等方法求得这些高程系统的高程。
3.精度分级3.1:GPS测量按其精度划分为AA、A、B、C、D、E级。
GPS快速静态定位测量可用于C、D、E级GPS控制网的布设。
3.2:各级GPS测量的用途:AA级主要用于全球性的地球动力学研究、地壳形变测量和精密定轨;A级主要用于区域性的地球动力学研究和地壳形变测量;B级主要用于局部形变监测和各种精密工程测量;C级主要用于大、中城市及工程测量的基本控制网。
D、E级主要用于中、小城市、城镇及测图、地籍、土地信息、房产、物探、勘测、建筑施工等的控制测量。
AA、A级。
可作为建立地心参考框架的基础。
AA、A、B级可作为建立国家空间大地测量控制网的基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2界面显示参数表1.11.3划分标准B、C D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用表1.4观测:表1.5数据处理(1)外业数据检核1) B级GPS网基线外业预处理和 C D E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds w 2J d (1.1)(7 -为基线测量中误差,单位为毫米2) B、C、D E级GPS网基线测量中误差7采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3) B、C D E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式 1.2式中:d ----基线测量中误差,单位为毫米,计算按1225规定执行。
对于四站以上同步观测时段,在处理完个边观测值后,应检查一切可能的三边环闭合差。
4) B、C D、E级GPS网外业基线的处理结果,其独立闭合环或附和路线坐标闭合差合差应满足公式(1.3 )的规定。
'■•:;w 3畑d'■- w 3* d■ ■- w 3內dS w 3; d(1.3)n为闭合环数。
(2)基线向量解算基本要求(略参考规范12.3.3节)2分类方法二:城市二、三、四等和一、二级城市或工程GPS按相邻点的平均距离和精度划分为二、三、四等和一、二级。
2.1参考规范(1.2 )W S和各坐标分量闭W S=《全球定位系统城市测量技术规范-1997》2.2界面显示参数表2.12.3划分标准1)各等级GPS网相邻点间弦长精度应按公式 2.1计算d i (2.1 )式中b ----标准差(基线向量的弦长中误差mn);a——固定误差(mm;b——比例误差系数(1X10-6);d——相邻点间的距离(km)。
2)各等级GPS网的主要技术要求应符合表 2.2规定。
相邻点最小距离应为平均距离的1/2~1/3 ;最大距离应为平均距离的2~3倍。
注:当边长小于200m时,边长中误差小于20mm3)布网原则接收机选择,观测基本技术要求(略),参考规范六七章。
4)同一时段观测值基线处理中,二、三等数据采用率都不宜低于80%5)采用单基线处理模式时,对于采用同一种数学模型的基线解,其同步时段中任一三边同步环的坐标分量相对闭合差和全长相对闭合差不宜超过表 2.3的规定。
表2.36)对于采用不同数学模型的基线解,其同步时段中任一三边同步环的坐标分量闭合差和全长相对闭合差按独立环闭合差要求检核。
同步时段中的多边形同步环,可不重复检核。
7)无论采用单基线模式或多基线模式解算基线,都应在整个GPS网中选取一组完全的独立基线构成独立环,各独立环的坐标分量闭合差和全长闭合差应符合下式的规定:(2.2 )式中w---环闭合差,w=n------ 独立环中的边数8)复测基线的长度较差,不宜超过下式的规定:ds W 2 (2.3)9)无约束平差中,基线向量的改正数(V^、也y、V^Z)绝对值应满足下式要求:V △X W 3(TV △y = 3 莎V △z W 3^ (2.4)10)约束平差中,基线向量的改正数与剔除粗差后的无约束平差结果的同名基线相应改正数的较差( d V △X、d V △Y、d V △Z)应符合下式要求:dV △X W 2(TdV △y W 2 (TdV △z W2 T(2.5 )当超限时,可认为作为约束的已知坐标、距离,已知方位与GPS网不兼容,应采用软件提供的或人为的方法剔除某些误差较大的约束值,直至符合上式要求。
3分类方法三:公路二、三、四等和一、二级公路二等、三等、四等、一级、二级3.1参考规范《公路勘测规范》20073.2界面显示参数表3.13.3划分标准1)各等级平面控制测量,其最弱点点位中误差不得大于土5cm,最弱相邻点相对点位中误差不得大于土3cm,最弱相邻点边长相对中误差不得大于下表的规定。
表3.2V 表3.5 — 项目 测量等级二等 三等四等 一级 二级 卫星高度角(°) > 15 > 15> 15 > 15 > 15 时间长度 静态(min ) > 240 > 90> 60 > 45 > 40 快速静态(min ) — > 30> 20 > 15 > 10 平均重复设站数(次/每点) > 4 > 2> 1.6 > 1.4 > 1.2 同时观测有效卫星个数(个) > 4 > 4> 4 > 4 > 4 数据采样率(s ) < 30 < 30< 30 < 30 < 30GDOP< 6 < 6 < 6 < 6 < 6 3)计算要求1) 同一时段观测值的数据剔除率不宜大于10%2) 重复基线测量的差值应满足式ds= (T (3.1 ) 式中: 3) ds----重复基线测量的差值;(T --- 标准差。
各级GPS 网同步环闭合差应符合式 3.2的规定。
(T (T (T (3.2 ) 式中:n----环或附和路线的边数 (T ---标准差 各级GPS 网异步环闭合环或附合路线坐标闭合差应符合公式 3.3的规定。
2)观测技术要求(3.3 )式中:n----环或附和路线的边数5)无约束平差中,基线分量的改正数绝对值应满足式式中:T ---标准差(mr )i 。
6)约束平差中,基线分量改正数与经过粗差剔除后的无约束平差结果的同一基线相应改正数较差的绝对值 应满足3.5满足的规定dVz(T (T (T △z W (T (3.4 )dV△ X W (TdV (T (3.5 )(T ---标准差 3.4的规定 (T式中:c ---标准差(mr)GPS控制网等级1控制网等级及其用途按照国家标准《全球定位系统( GPS)测量规范》(GB/T13814-2009 ), GPS测量按其精度分为A、B、C、D、E五级。
其中:1) A级GPS网由卫星定位连续运行基站构成,用于建立国家一等大地控制网,进行全球性的地球动力学研究、地壳变形测量和卫星精密定轨测量。
2) B级GPS测量主要用于建立国家二等大地控制网,建立地方或者城市坐标基准框架、区域性的地球动力学研究、地壳变形测量和各种精密工程测量等。
3) C级GPS测量用于建立三等大地控制网,以及区域、城市及工程测量的基本控制网等。
4) D级GPS测量用于建立四等大地控制网。
5) E级GPS测量用于测图、施工等控制测量。
2、精度要求GPSBs G D、E级穡度指标.3、卫星定位连续运行基准站网的布设1 )布设原则CORS依据管理形式、任务要求和应用范围,划分为国家基准站网、区域基准站网和专业应用站网。
(1)国家基准站网国家基准站网的布设应顾及社会发展、经济建设和自然条件因素。
在即将实施的国家大地基准基础设施建设项目中,我国将在全国范围内建设360个地基稳定、分布均匀的连续运行基准站(其中:新建150个、改造60个、直接利用已有的站150个)。
(2)区域基准站网区域基准站网是指在省、市地区建立的连续运行基准站网,主要构成高精度、连续运行的区域坐标基准框架,为省、市区域提供不同精度的位置服务和相关信息服务。
区域基准站网的布设按实时定位精度而选择基准站间的距离,当采用网络RTK技术满足厘米级实时定位,其区域基准站布设间距不应超过80KM。
(3)专业应用站网专业应用站网是由专业部门或者机构根据专业需求建立的基准网站,用于开展专业信息服务。
它的布设间距主要根据专业需求,当满足实时定位分米级要求,则基准站布设间距一般在100~150KM之间。
2)基准站设计与选址基准站设计时应根据基准站网布设原则,在图上标出设计基准站站址,同时标明基准站及其周围地区的主要地质构造、地震活动,与设计有关的地震台、人卫站,以及可以利用的GPS、大地测量网站点。
设计完成后应进行实地踏勘选址。
选址小组应由熟悉GPS、水准测量的工程师和地质工程师共同组成。
基准是投资大并且需要长期稳定使用的基础设施,应该选择地质结构稳定、安全僻静、交通便利,并利用测量标志长期保存和观测的地方。
同时基站周围需要有稳定、安全可靠的电源,用于接入公用和专业通讯网络。
站点应距离易产生多路径效应的地物不小于200M,应有10度以上地平高度角的卫星通视条件,距离电磁干扰区的距离不小于200M,同时要避开易产生振动的地带。
站址选定后,应设立一个标注有站名、站号、标石类型的点位标记,拍摄点位的远景、近景照片各一张,并填绘基准站点之记。
3)基础设施建设基础设施的建设主要是依据基准站建筑整体设计及专项防护设计(如防风、防雷)完成观测墩、观测室的建造,以及电力线、通讯线等管线敷设。
观测墩一般为钢筋混凝土结构,依据站址地质环境,观测墩可建为基岩观测墩或者土层观测墩。
专业应用网站,根据情况也可建造屋顶观测墩。
观测室面积不宜过小,设计时应考虑防水、排水、防风、防雷等因素。
电力和信号管线应分别布设,预埋两种管道,并进行动物防护处理,观测室内的温度和相对湿度应满足仪器设备正常运行的要求。
4)设备配置与安装基站设备主要由全球卫星导航系统接收机、天线、气象设备、不间断电源、通信设备、雷电防护设备、计算机和集成柜等组成。
部分GPS基准站配置原子钟、卫星通信设备及空调等设备。
各种设备的要求应该符合有关规范和CORS系统设计的要求。
5)数据中心数据中心以计算机及网络技术为基础,用于数据存储、处理分析和产品服务。
建设时应考虑:安全性、可靠性、保密性和可恢复性。
数据中心主要由基准站网管理系统,数据处理分析系统和产品服务系统组成。
其产品可以分为位置服务、时间服务、气象服务、源数据服务等类型。
6)数据通信网络基准站网应在专用网络上构建数据通信网络,应采用TCP/IP作为数据通信协议。
连接基准站的通信链路可以采用数据专线、无线扩频等通信方式,连接数据中心的通信链路可采用数据专线、卫星通信等通信方式。
国家基准站网的基准数据应每日定时传输,区域基准站网和专业应用站网需要提供实时服务时,应该具备数据实时传输能力。