自动旋转导向钻井工具结构原理及特点
旋转导向钻井工具的研制原理

第26卷 第5期2005年9月石油学报AC TA PETROL EI SIN ICAVol.26 No.5Sept.2005 基金项目:国家高技术研究发展计划(863)“旋转导向钻井系统关键技术研究”(2003AA602013)和中国石油化工集团公司重大攻关项目(J P01005)联合资助。
作者简介:闫文辉,男,1965年9月生,1999年获西安石油学院硕士学位,现为西安石油大学副教授,硕士生导师,主要从事石油机械设计及设备检测与故障诊断方面的教学和科研工作。
E 2mail :ywh369@文章编号:0253Ο2697(2005)05Ο0094Ο04旋转导向钻井工具的研制原理闫文辉 彭 勇 张绍槐(西安石油大学机械工程学院 陕西西安 710065)摘要:介绍了旋转导向钻井工具的工作原理及结构,指出了研制该工具的主要技术特点。
旋转导向钻井工具主要由稳定平台单元、工作液控制分配单元和偏置执行机构单元3部分组成,其测试元件将测得的井眼参数通过短程通讯传输到随钻测量仪,再由随钻测量仪将信息传输到地面。
同时,旋转导向钻井工具接收由地面发出的指令,并通过稳定平台单元调控工作液来控制分配单元中的上盘阀高压孔的位置。
工作液控制分配单元将过滤后的泥浆依次分配到3个柱塞,给推板提供推靠动力,并使该推靠力的合力方向始终保持在上盘阀高压孔所对应的位置,在近钻头处形成拍打井壁的侧向力。
通过对侧向力的大小、方向和拍打频率的调整,可直接控制该工具的导向状态。
关键词:旋转导向钻井工具;测试元件;导向控制;井眼参数;随钻测量中图分类号:TE82 文献标识码:AMechanism of rotary steering drilling toolYAN Wen 2hui PEN G Y ong ZHAN G Shao 2huai(College of Mechanical Engineering ,X i πan S hi you Universit y ,X i πan 710065,China )Abstract :The working principle and structure of a rotary steering drilling tool are introduced.The main technical properties of the tool are described.The tool mainly includes three parts :①unit of stabilization platform ;②unit for controlling and assigning work 2ing liquid ;③unit of Push 2the 2Bit working structure.The wellbore data can be transmitted to measurement while drilling (MWD )u 2nit f rom the test component in the tool through a short distance communication component and then transmitted to the instrument on ground by MWD unit.At the same time ,the receiver in the component receives the instruction f rom the instrument on ground ,and then control the high 2pressure hole located on the upper plate hose by controlling and assigning working liquid with a controller in the stabilization platform unit.The unit for controlling and assigning working liquid takes the filtered mud as the working liquid distribu 2ted in three mud pipes in turn.The mud provides the “pad ”with a motive force and maintains the direction of the join force on the position in accord with the high 2pressure hole on the upper valve all the time.Thus there will form a side force near the bit flapping the wall of the well.The adjustment of the size and direction of the side force acted on the wall and the flapping f requency could di 2rectly control the steering state of the drilling tool.K ey w ords :rotary steering drilling tool ;measurement unit ;steering control ;wellbore data ;measurement while drilling 旋转导向钻井技术是20世纪90年代初发展起来的一项自动化钻井新技术。
旋转导向钻井智能钻井介绍 Auto Trak,Power Drive, Geo Pilot
目录
旋转导向钻井技术概况
背景:为克服滑动导向技术的不足,从20世纪80 年代后期,国际上开始研究旋转导向钻井技术。 发展:20世纪90年代初期,多家公司形成了商业化 的旋转导向技术,目前有三种比较成熟导向系统。 组成:旋转导向钻井系统实质上是一个旋转导向 工具与测量传输仪器(MWD/LWD)联合组成的井下 闭环工具系统。 应用:非常适合目前开发特殊油藏的超深井、高 难度定向井、水平井、大位移井和水平分支井等。
3、动态指向式旋转导向钻井工具
4、基于旋转导向钻进方式的可控弯接头系统 5、指向式旋转导向钻井工具
动态推进式旋转导向钻井工具
• 胜利油田承担国家“863”计划“旋转导向钻井系统关键
技术研究”后,与西安石油大学联合开发 • 原理:斯伦贝谢的PowerDrive基本一样。
• 现状:进行了20 多次的地面试验,2006 年8 月在营122斜
动态指向式旋转导向钻井工具
由海洋石油工程股份有限公司及西南石油大学,结合了哈 里伯顿的Geo–Pilot的指向式结构和斯伦贝谢的Power Drive的随钻的下盘阀结构,提出了动态指向式旋转导向
钻井工具的设计思想,目前还停留在理论阶段。
基于旋转导向钻进方式的可控弯接头系统
由西安石油大学机械工程学院中原油田第三采油厂在CNPC
典型旋转导向钻井工具介绍
• Baker Hughes推出的Auto Trak不旋转外筒式 闭环自动导向钻井系统。
• Schlumberger Anadrill公司的Power Drive
全旋转导向钻井系统。 • Sperry-Sun 产品服务公司推出的Geo-Pilot 旋转导向自动钻井系统。
1.Auto Trak 旋转导向钻井系统
旋转导向原理及应用
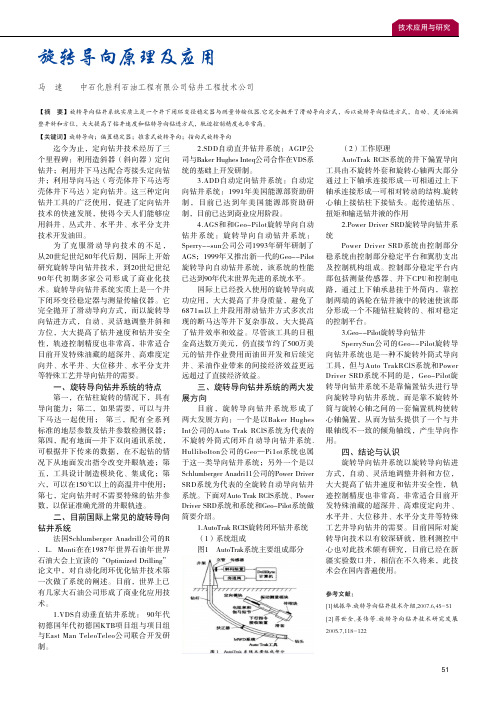
51旋转导向原理及应用马 速 中石化胜利石油工程有限公司钻井工程技术公司【摘 要】旋转导向钻井系统实质上是一个井下闭环变径稳定器与测量传输仪器.它完全抛开了滑动导向方式,而以旋转导向钻进方式,自动、灵活地调整井斜和方位,大大提高了钻井速度和钻转导向钻进方式,轨迹控制精度也非常高。
【关键词】旋转导向;偏置稳定器;推靠式旋转导向;指向式旋转导向迄今为止,定向钻井技术经历了三个里程碑:利用造斜器(斜向器)定向钻井;利用井下马达配合弯接头定向钻井;利用导向马达(弯壳体井下马达弯壳体井下马达)定向钻井。
这三种定向钻井工具的广泛使用,促进了定向钻井技术的快速发展,使得今天人们能够应用斜井、丛式井、水平井、水平分支井技术开发油田。
为了克服滑动导向技术的不足,从20世纪世纪80年代后期,国际上开始研究旋转导向钻井技术,到20世纪世纪90年代初期多家公司形成了商业化技术。
旋转导向钻井系统实质上是一个井下闭环变径稳定器与测量传输仪器。
它完全抛开了滑动导向方式,而以旋转导向钻进方式,自动、灵活地调整井斜和方位,大大提高了钻井速度和钻井安全性,轨迹控制精度也非常高,非常适合目前开发特殊油藏的超深井、高难度定向井、水平井、大位移井、水平分支井等特殊工艺井导向钻井的需要。
一、旋转导向钻井系统的特点第一,在钻柱旋转的情况下,具有导向能力;第二,如果需要,可以与井下马达一起使用; 第三,配有全系列标准的地层参数及钻井参数检测仪器;第四,配有地面—井下双向通讯系统,可根据井下传来的数据,在不起钻的情况下从地面发出指令改变井眼轨迹;第五,工具设计制造模块化、集成化;第六,可以在150℃以上的高温井中使用;第七,定向钻井时不需要特殊的钻井参数,以保证准确光滑的井眼轨迹。
二、目前国际上常见的旋转导向钻井系统法国Schlumberger Anadrill公司的R .L.Monti在在1987年世界石油年世界石油大会上宣读的“Optimized Drilling”论文中,对自动化闭环优化钻井技术第一次做了系统的阐述。
钻井旋冲工具提速机理及结构设计

钻井旋冲工具提速机理及结构设计钻井旋冲工具是石油钻井中非常重要的一种工具,它能够在钻进过程中提供旋转和冲击力,从而加速钻头的钻进速度,并且有助于打破岩石或者其他障碍物。
钻井旋冲工具的设计和提速机理对于钻井效率和钻井成本都有着重要的影响。
本文将针对钻井旋冲工具的提速机理和结构设计进行探讨,以期为钻井工程的提速和优化提供参考和指导。
一、提速机理1. 旋转机理钻井旋冲工具是通过旋转来传递能量的,它利用钻杆的旋转将旋转动能传递给钻头,从而使钻头具有钻进作用。
在钻井过程中,旋转是必不可少的能量传递方式,能够提供很大的钻进力量,因此提速机理中旋转机理是非常关键的一环。
2. 冲击机理除了旋转之外,钻井旋冲工具还利用冲击力来打破钻进过程中的固体颗粒,例如岩石等。
冲击机理主要是通过冲撞器或者冲击钻头来实现的,它能够为钻进提供冲击动力,从而加速钻井的进展。
钻井旋冲工具的提速机理主要包括旋转机理和冲击机理,这两种机理相互配合,能够提供充足的动力和能量,从而加快钻井的速度。
二、结构设计1. 钻杆设计钻杆是钻井旋冲工具的重要组成部分,它要能够承受较大的旋转力和冲击力,因此在设计时需要选用高强度耐磨的材料,并且要考虑其连接结构的可靠性和稳定性。
冲击器是钻井旋冲工具的关键部件之一,它直接影响着冲击力的大小和频率。
在冲击器的设计中,需要考虑到冲击力的传递效率和可调节性,以便根据钻井地质条件的不同来进行调整。
钻头作为直接与岩石接触的部件,其设计对于钻井进展和效率起着至关重要的作用。
在钻头的设计中,需要考虑到其耐磨性、自清洁性和冲击性能,从而能够更好地适应不同的地质条件。
在一些特殊的钻井条件下,需要使用冲击钻头来进行特殊处理,因此冲击钻头的设计也是非常重要的一环。
在冲击钻头的设计中,需要考虑到其结构的稳定性和耐用性,同时也要注重其冲击效果和冲击频率的控制。
钻井旋冲工具的结构设计需要考虑到钻杆、冲击器、钻头和冲击钻头等多个方面,这些部件相互配合,才能够发挥出最佳的钻井效果。
旋转导向造斜能力工具介绍

旋转导向造斜能力工具介绍
旋转导向造斜能力工具是一种用于油气井钻井过程中的先进设备,它通过精确控制钻头的旋转方向和速度,实现对井眼轨迹的精确控制,从而提高钻井效率和安全性。
这种工具主要由以下几个部分组成:
1. 旋转导向系统:这是旋转导向造斜能力工具的核心部分,主要包括马达、减速器、轴承等部件。
马达负责提供动力,减速器将马达的高速旋转转换为低速高扭矩输出,轴承则承受钻头在钻井过程中产生的各种力和振动。
2. 传感器和控制系统:传感器用于实时监测钻头的位置、速度、振动等信息,将这些信息传输给控制系统。
控制系统根据这些信息,自动调整马达的转速和方向,以实现对钻头运动轨迹的精确控制。
3. 钻头:旋转导向造斜能力工具的钻头通常采用高强度、高耐磨性的材料制成,以保证在高压、高温、高磨蚀性的环境中正常工作。
钻头的形状和结构也经过特殊设计,以提高钻井效率和降低摩阻。
4. 钻井液循环系统:钻井液循环系统负责将钻井液从地面泵入井内,通过钻头喷出,形成高速射流,清洗井底并冷却钻头。
同时,钻井液还可以传递钻头受到的压力和振动,保护井壁稳定。
旋转导向造斜能力工具通过集成先进的旋转导向系统、传感器和控制系统、高性能钻头以及钻井液循环系统,实现了对井眼轨迹的精确控制,大大提高了钻井效率和安全性。
旋转导向系统和地质导向钻井简介
动态推靠式 Power Drive SRD
静态推靠式 Auto Trak RCLS
静态指向式 Geo-pilot
7.1 旋转导向系统简介
三、旋转导向系统的原理
斯伦贝谢公司的PowerDrive系统
7.1 旋转导向系统简介
三、旋转导向系统的原理
哈里伯顿斯派里森公司的Geo-Pilo系统
30' 40' 50' 60' 70' 80' 90' 2000' 年代
滑动导向
7.1 旋转导向系统简介
二、旋转导向钻井的主要优点
• 提高了机械钻速; • 增强了井眼清洁效果; • 增强了井眼轨迹控制精度和
灵活性; • 减少了起下钻次数; • 井眼规则、光滑; • 克服极限位移限制。
7.1 旋转导向系统简介
旋转导向、地质导向钻井简介
• 7.1 旋转导向系统简介 • 7.2 地质导向钻井简介
7.1 旋转导向系统简介
一、导向钻井的发展经过
旋转导向钻井技术是20世纪90年代初期发展起来的 一项钻井新技术,代表了钻井技术发展的最高水平。
LWD
斜 向 器
井 下 马
MWD
弯 外 壳 马
旋 革命性 转 进步
导
达 WLMWD 达 向
7.2 地质导向钻井简介
一、地质导向钻井的仪器系统组成
井下仪器 + 地面系统 + 上位机系地面接口箱
泵冲传感器 计算机
电阻率、伽玛接口箱
打印机
井下仪器串
电阻率短接
脉冲发生器 电子控制短节
电源系统短节 MWD电子测量短节 伽玛测量短节
7.2 地质导向钻井简介
自动旋转导向钻井工具结构原理及特点

自动旋转导向钻井工具结构原理及特点[摘要] 自动旋转导向钻井工具弥补了滑动式导向钻井工具在定向井钻井,特别是在大位移井及长距离水平井的使用中暴露的缺点与不足。
浅显分析国内外在定向钻井工具技术差距,从结构原理和特点上出发阐述了自动旋转导向向钻井工具的。
[关键词] 自动旋转导向钻井工具一.前言现有的滑动式导向钻井工具在定向钻井,特别是在大位移井及长距离水平井的使用中暴露出不少缺点与不足。
自动旋转导向钻井工具可以弥补这些缺点,是目前定向钻井工具发展的一个热点及方向。
笔者据此介绍美国三家公司的自动旋转导向钻井工具的结构原理及特点。
针对现有定向钻井工具的缺点和不足,浅析今后旋转导向钻井工具结构设计的发展趋势。
迄今为止,定向钻井技术经历了三个里程碑:①利用造斜器(斜向器)定向钻井;②利用井下马达配合弯接头定向钻井(造斜率是弯接头弯角、井下马达刚度和地层岩石硬度的函数);③利用导向马达(弯壳体井下马达)定向钻井(弯角点离钻头的距离近得多,因此产生的造斜率大)。
目前这三种定向钻井工具在世界各地被广泛使用,并促进了定向钻井技术的快速发展,使得今天人们能够应用斜井、丛式井、水平井技术开发油田。
二.目前国内定向钻井工具现状随着石油工业的发展,为了获得更好的经济效益,需要开发深井、超深井、大位移井和长距离水平井,而且常常要在更复杂的地层,如高陡构造带钻井。
这些都对定向钻井工具提出了更高的要求。
目前以井下马达为主的定向钻井工具已不能满足现代钻井技术的要求,主要存在以下缺点和不足:(1)利用井下马达导向时是滑动钻进,钻柱弯曲比旋转钻进时严重,井壁与钻柱间的轴向摩擦力大,使钻压很难加在钻头上。
在大延伸井和水平井中这一情况更严重,在极端情况下会造成钻柱屈服,因此它限制了水平井和大斜度井的深度。
(2)在地面对井下马达进行扭方位操作时,旋转摩擦、钻头扭矩、钻杆的扭转弹性变形等都妨碍了工具面的控制,从而影响井下马达在大斜度井和水平井中的使用。
旋转导向造斜能力工具介绍 -回复

旋转导向造斜能力工具介绍-回复什么是旋转导向造斜能力工具?旋转导向造斜能力工具是一种用于在石油和天然气钻井过程中实现井眼偏斜的工具。
它通过旋转方向的改变和摆动的运动来实现钻井井眼倾斜的目标。
这种工具通常由一系列旋转导向工具组成,包括导向翼、模块短节、固定尾节和导向电缆。
旋转导向造斜能力工具的工作原理:1. 导向翼:导向翼通过改变旋转方向来实现井眼的偏斜。
导向翼带有特殊的翼片,当工具旋转时,翼片会向外张开,使整个工具发生摆动运动。
通过控制翼片的摆动程度和空间角度,可以实现井眼的倾斜。
2. 模块短节:模块短节是旋转导向造斜能力工具中的关键部件。
它由多个独立的模块组成,每个模块都配有导向翼和连接机构。
当模块短节暴露在井眼中时,它们可以相互连接,并形成一个稳定的整体。
通过改变短节的数量和排列方式,可以调整井眼的倾斜程度。
3. 固定尾节:固定尾节是连接在模块短节后部的部件。
它通常由金属材料制成,并具有保持整个工具稳定的作用。
固定尾节的特殊形状可以帮助工具在钻进的过程中控制井眼的方向。
4. 导向电缆:导向电缆是连接在旋转导向造斜能力工具上的电器线,在钻进过程中传输控制指令和数据。
导向电缆通过与地面上的控制台通信,使钻井工程师能够实时监控工具的位置和状态,并做出相应的调整。
旋转导向造斜能力工具的应用范围:旋转导向造斜能力工具在石油和天然气钻井工程中具有广泛的应用。
以下是一些常见的应用场景:1. 建立水平井眼:在水平井眼中,旋转导向造斜能力工具可以通过控制翼片的旋转方向和摆动程度来使井眼偏斜,从而实现水平井眼的构建。
这可以提高井眼的排水能力和采油效果。
2. 侧向钻进:旋转导向造斜能力工具可以在垂直井眼中实现侧向钻进。
通过调整导向翼的摆动程度和空间角度,可以将钻头引导到目标油气层的侧向位置,增加钻探范围和采油效率。
3. 水平井段控制:在水平井眼中,旋转导向造斜能力工具可以实现水平段的控制。
通过控制导向翼的旋转和摆动,可以调整井眼的方向和轨迹,使其与目标油气层的位置保持一致。
旋转导向钻井工具的研制原理
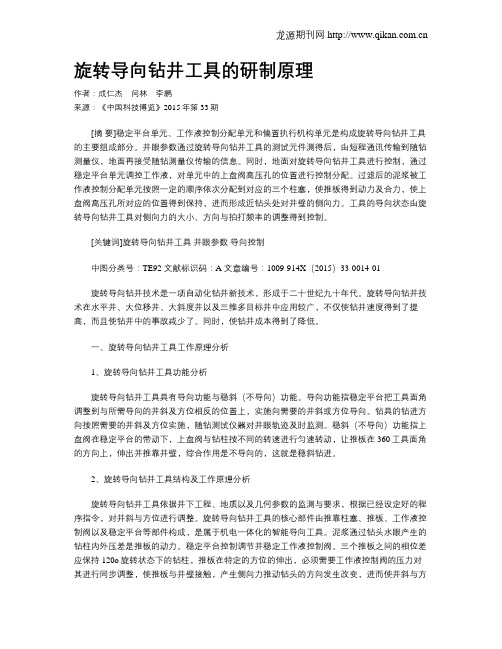
旋转导向钻井工具的研制原理作者:成仁杰闫林李鹏来源:《中国科技博览》2015年第33期[摘要]稳定平台单元、工作液控制分配单元和偏置执行机构单元是构成旋转导向钻井工具的主要组成部分。
井眼参数通过旋转导向钻井工具的测试元件测得后,由短程通讯传输到随钻测量仪,地面再接受随钻测量仪传输的信息。
同时,地面对旋转导向钻井工具进行控制,通过稳定平台单元调控工作液,对单元中的上盘阀高压孔的位置进行控制分配。
过滤后的泥浆被工作液控制分配单元按照一定的顺序依次分配到对应的三个柱塞,使推板得到动力及合力,使上盘阀高压孔所对应的位置得到保持,进而形成近钻头处对井壁的侧向力。
工具的导向状态由旋转导向钻井工具对侧向力的大小、方向与拍打频率的调整得到控制。
[关键词]旋转导向钻井工具井眼参数导向控制中图分类号:TE92 文献标识码:A 文章编号:1009-914X(2015)33-0014-01旋转导向钻井技术是一项自动化钻井新技术,形成于二十世纪九十年代。
旋转导向钻井技术在水平井、大位移井、大斜度井以及三维多目标井中应用较广,不仅使钻井速度得到了提高,而且使钻井中的事故减少了。
同时,使钻井成本得到了降低。
一、旋转导向钻井工具工作原理分析1、旋转导向钻井工具功能分析旋转导向钻井工具具有导向功能与稳斜(不导向)功能。
导向功能指稳定平台把工具面角调整到与所需导向的井斜及方位相反的位置上,实施向需要的井斜或方位导向。
钻具的钻进方向按照需要的井斜及方位实施,随钻测试仪器对井眼轨迹及时监测。
稳斜(不导向)功能指上盘阀在稳定平台的带动下,上盘阀与钻柱按不同的转速进行匀速转动,让推板在360工具面角的方向上,伸出并推靠井壁,综合作用是不导向的,这就是稳斜钻进。
2、旋转导向钻井工具结构及工作原理分析旋转导向钻井工具依据井下工程、地质以及几何参数的监测与要求,根据已经设定好的程序指令,对井斜与方位进行调整。
旋转导向钻井工具的核心部件由推靠柱塞、推板、工作液控制阀以及稳定平台等部件构成,是属于机电一体化的智能导向工具。
旋转导向工具导向模块部件组成及原理

旋转导向工具导向模块部件组成及原理摘要:本文主要对旋转导向钻井工具研发的关键技术之一导向模块的研究情况作了简要介绍,并对目前导向模块的机械设计结构、供电、通讯、控制系统的工作原理、非接触供电部分的试验设计做了详细的说明,确定了存在的技术难点及下一步我们要主攻的研究方向。
关键词:旋转导向工具导向模块非接触供电电磁感应定向控制一、旋转导向结构旋转导向钻井工具由双向通讯系统、MWD随钻测井系统以及导向系统三部分组成。
导向系统是其主要执行机构,是能否实现定向自动控制的重要部件。
导向头设计结构,如图1所示。
图1:导向头结构图导向头从结构上分为旋转轴和不旋转导向外套两大部分。
旋转轴从导向套中间穿过与钻头连接,带动钻头与钻柱一起旋转,导向套与旋转轴之间镶有金刚石耐磨片的硬质合金滑动轴承,以保证相对转动时产生较小的磨损。
三个可伸缩翼肋布置在导向套中,由地面大控制闭环或地下小控制闭环控制其伸缩量以进行方位和井斜的控制。
二、导向头各部件组成与工作原理(一)导向头各部件组成导向头部分由初级电路模块、非接触供电及通讯模块、次级电路及近钻头井斜工具面测量模块、液压模块等组成。
其中初级电路模块、非接触供电的内套部分和中心轴一起旋转,而非接触供电的外套部分、次级电路及近钻头井斜工具面测量模块、液压模块置于不旋转导向套中。
1.初级电路模块包括信号解调电路、信号与能量载波调制电路。
它用于接收上部泥浆发电机向下传递的电能及地面给出的命令信号给出的轨迹井斜方位信号并经过处理后输出。
再通过信号与能量载波调制电路与命令信号、轨迹井斜方位信号进行相应的调制,输出给非接触供电及通讯模块。
2.非接触供电及通讯模块信号与电能的共同传递还会带来信号调制和双向同步传输能量与信号的问题。
信号调制的关键是如何进行优化调制以达到最小的错码率。
双向同时传输的主要问题是在一条通路上如何进行下传150W交流电能的同时上传控制信号。
这些方面都需要进行深入的理论研究及实验。
旋转导向钻井技术应用研究及其进展
旋转导向钻井技术应用研究及其进展
旋转导向钻井技术是指利用钻头本身的旋转引导钻柱前进方向的一种钻井技术。
它具
有导向准确、操作简单、钻井速度快、成本相对较低等优点,在油气田、地热井、水井等
领域有广泛应用。
本文将对旋转导向钻井技术的原理、分类、应用现状及未来发展趋势进
行分析和探讨。
一、旋转导向钻井技术原理
旋转导向钻井技术是以钻头的旋转运动为基础实现钻井方向控制的。
钻头旋转运动产
生了副反力,同时地层阻力又使得钻头产生推力,将钻柱不断向前推进。
当钻头稍微偏离
钻井轨迹时,钻柱的副反力和阻力不再共线,形成了一个力矩,使得钻柱产生了角转动,
从而实现了钻井方向的调整。
旋转导向钻井技术按照操作方式可以分为手动导向钻井和自动导向钻井两类;按照应
用领域可以分为油气田开发导向钻井、地热井导向钻井、水井导向钻井等。
根据所需导向
精度可分为低精度导向、中精度导向和高精度导向。
旋转导向钻井技术已经广泛应用于油气田开发、地热井和水井钻探等领域。
在油气田
开发中,旋转导向钻井技术可以实现复杂井型和多层次钻探,提高采气采油效率。
在地热
井和水井钻探中,旋转导向钻井技术可以提高钻井效率、降低钻井成本。
未来旋转导向钻井技术将继续朝着快速、高效、低成本、高精度的方向发展。
一方面,钻井技术将逐渐自动化,实现更加精准和高效的导向钻井;另一方面,随着油气田、地热
井和水井等应用领域的不断扩大,导向精度将会更加重要。
因此,未来旋转导向钻井技术
将面临更高的技术挑战和发展机遇。
旋转导向钻井系统原理

旋转导向钻井系统原理旋转导向钻井系统原理是:旋转钻井是从顿钻钻井演变而来的,它的应用最为广泛。
转盘钻井是通过一套地面设备,即钻机、井架以及一套提升系统,通过提升系统将井下钻具提起、下放、靠转盘转动。
钻具转动带动下边钻头转动,钻头转动时就可破碎岩石,破碎了的岩屑被泥浆泵泵人井内的泥浆循环带到地面。
钻头磨损了,再将钻具起出来换上新钻头,再下钻钻进,这样井不断加深直到将井钻到预计井深。
石油和天然气埋藏在地下几十m到几km深度不等的有孔隙、裂缝或溶洞的岩石中,为了寻找和开采石油天然气,从地面向地下的油气层之间,钻凿出一个通道的过程称之为石油天然气钻井。
其工序为:①钻井前,要在地面确定钻井的位置,然后在井位处打好安装钻机的基础并安装井架和钻机。
②钻井作业时,依靠钻机带动钻杆和钻头旋转,钻头逐次向下破碎岩层,形成一个井眼(钻井井眼尺寸的大小是由钻头大小来决定的)。
钻头在破碎岩层的同时,通过空心的钻杆向地下注人钻井液,将钻头破碎地层而产生的大量岩屑由循环的钻井液带到地面。
地面的固控装置将钻井液中的岩屑清除后,通过钻井泵再次将钻井液打入井内。
③钻达设计深度后,要在井眼内下入专用仪器进行测井作业,目的是确定井下地层岩性和各个油、气、水层的位置。
然后再下入小于钻井井眼的套管,并在套管与井壁缝隙间内注入水泥浆将套管固定在井壁上。
④最后一道工序是对油层位置的套管进行射孔,形成一个井下油气流人套管内的孔道。
油气的地层压力高时可自行流出地面,这种井称为自喷油气井r油气压力较低时借助外力从井下抽吸,这种井称之为非自喷井。
钻井时要有一套配套完整、功能齐全的钻机,有质量优异不易发生事故的钻杆、套管和钻头,有性能优良和钻遇地层岩性相匹配的钻井液等。
总之,石油天然气钻井的目的就是要凿穿岩石,发现和保护好油气层,并钻成一个通道确保石油和天然气通畅地流到地面。
动旋转导向钻井工具结构原理及特点

动旋转导向钻井工具结构原理及特点
一、结构原理:
1.器身:器身是工具的主要结构,由一根中空管组成。
中空管通常由高强度合金钢材料制成,具有足够的强度和刚度,以承受旋转和转向的作用力。
2.钻头:钻头位于器身的下端,用于切削岩层。
钻头一般采用合金钢制造,表面覆盖硬质合金,以提高抗磨损性能。
3.钻领:钻领位于钻头的上部,用于连接导向系统和起下钻工具。
钻领一般由海洋合金钢材料制造,具有足够的强度和刚度,以承受导向系统的作用力。
4.导向系统:导向系统是动旋转导向钻井工具的关键部分,通过控制导向力和扭矩,使钻头能够沿着预定方向前进。
导向系统主要由测量装置和调整机构组成,测量装置用于测量钻井工具与井眼的位置关系,调整机构用于调整钻井工具的导向力和扭矩。
5.起下钻工具:起下钻工具用于传递旋转力和推进力,使钻头能够切削岩层。
二、特点:
1.高效性:动旋转导向钻井工具能够实现同钻井作业,既可以完成钻井又可以进行导向,提高了钻井效率。
2.精确性:动旋转导向钻井工具通过测量装置和调整机构实现精确的导向控制,能够准确定位和导向井眼,提高了钻井的准确性。
3.可控性:动旋转导向钻井工具能够通过调整导向力和扭矩,实现对钻头的精确控制,能够适应不同的地质条件和井眼要求。
4.安全性:动旋转导向钻井工具能够实现对井眼的实时监测和控制,减少了钻井事故的发生概率,提高了作业安全性。
5.经济性:动旋转导向钻井工具能够提高钻井效率和准确性,降低钻井成本,提高经济效益。
总体而言,动旋转导向钻井工具结构简单,操作方便,能够提高钻井效率和准确性,降低钻井成本,是目前广泛应用的一种钻井工具。
旋转导向钻井技术介绍
旋转导向钻井技术介绍引言近十几年来,水平井、大位移井、多分支井等复杂结构井和“海油陆采”的迅速发展。
为了节约开发成本和提高石油产量,对那些受地理位置限制或开发后期的油田,通常通过开发深井、超深井、大位移井和长距离水平井来实现,进而造成复杂结构的井不断增多。
目前通行的滑动钻井技术已经不能满足现代钻井的需要。
于是,自20世纪80年代后期,国际上开始加强对旋转导向钻井技术的研究;到90年代初期,旋转导向钻井技术已呈现商业化。
国外钻井实践证明,在水平井、大位移井、大斜度井、三维多目标井中推广应用旋转导向钻井技术,既提高了钻井速度,也减少了钻井事故,从而降低了钻井成本。
旋转导向钻井技术是现代导向钻井技术的发展方向。
旋转导向钻井技术旋转导向钻井法是在用转盘旋转钻柱钻井时随钻实时完成导向功能。
钻进时的摩阻与扭阻小、钻速高、钻头进尺多、钻井时效高、建井周期短、井身轨迹平滑易调控。
此外,其极限井深可达15 km,钻井成本低。
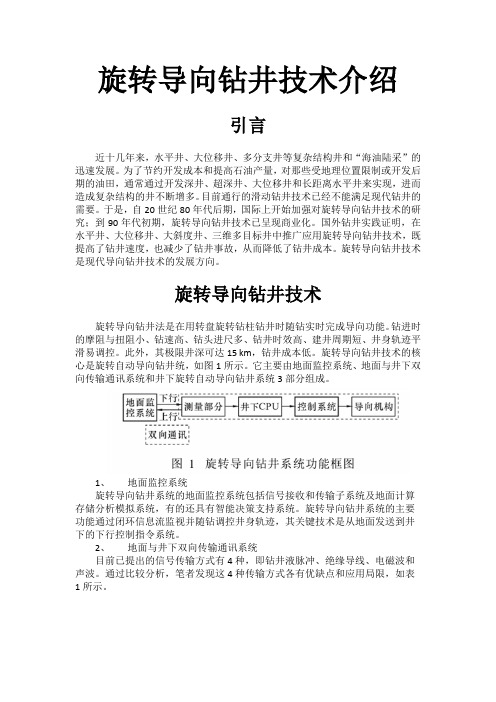
旋转导向钻井技术的核心是旋转自动导向钻井统,如图1所示。
它主要由地面监控系统、地面与井下双向传输通讯系统和井下旋转自动导向钻井系统3部分组成。
1、地面监控系统旋转导向钻井系统的地面监控系统包括信号接收和传输子系统及地面计算存储分析模拟系统,有的还具有智能决策支持系统。
旋转导向钻井系统的主要功能通过闭环信息流监视并随钻调控井身轨迹,其关键技术是从地面发送到井下的下行控制指令系统。
2、地面与井下双向传输通讯系统目前已提出的信号传输方式有4种,即钻井液脉冲、绝缘导线、电磁波和声波。
通过比较分析,笔者发现这4种传输方式各有优缺点和应用局限,如表1所示。
3、井下旋转自动导向钻井系统井下旋转自动导向钻井系统是旋转自动导向系统的核心,它主要由3部分构成,即测量系统、导向机构、CPU和控制系统。
(1)测量系统测量系统主要用于监测井眼轨迹的井斜、方位及地层情况等基本参数,使钻井过程中井下地质参数、钻井参数和井眼参数能够实时测量、传输、分析和控制。
旋转导向钻井技术应用研究及其进展

旋转导向钻井技术应用研究及其进展旋转导向钻井技术是一种通过旋转钻杆来改变钻头在井眼中的方向的钻井方法。
该技术通过控制钻杆和钻头的旋转方向和速度,从而控制钻头在井眼中的前进方向,实现井眼的弯曲和定向钻井。
旋转导向钻井技术在石油勘探和开发中得到了广泛应用,同时也在地热能、地下储气库等领域得到了应用。
一、旋转导向钻井技术的原理及特点1. 高效性:旋转导向钻井技术可以实现井眼的弯曲和定向钻井,可以快速地改变井眼的方向,提高钻井效率。
2. 灵活性:旋转导向钻井技术可以根据具体的钻井需求来灵活调整钻杆和钻头的旋转方向和速度,适应不同的地质条件和井眼形状。
3. 精准性:旋转导向钻井技术可以实现高精度的定向钻井,能够满足复杂地质条件下的钻井需求。
1. 旋转导向钻井技术在石油勘探中的应用在石油勘探中,旋转导向钻井技术可以帮助勘探公司快速地找到潜在的油气储层,提高勘探效率。
通过控制钻头的旋转方向和速度,可以实现垂直井眼向水平井眼的转变,同时可以实现井眼的弯曲,应对不同地质条件下的勘探需求。
地热能开发需要在地下岩石中进行钻井,以获取地热能资源。
在这种情况下,由于地下岩石的复杂性和不同地质条件,传统的钻井方法往往难以满足需求。
而旋转导向钻井技术可以根据地质条件和井眼形状,灵活地调整钻头的方向和速度,使钻井过程更加灵活和高效。
地下储气库需要在地下进行大规模的储气钻井,为城市供应天然气。
在这种情况下,旋转导向钻井技术可以帮助储气库公司实现良好的储气井眼设计,并在钻井过程中提高钻井效率和精度。
在技术方面,随着石油工程技术的不断发展,旋转导向钻井技术已经实现了自动化和智能化。
通过加装传感器和控制系统,可以实现对钻头运动的实时监测和控制,实现钻井过程的智能化管理。
还可以通过井下遥控系统,实现对钻井过程的远程控制,提高了钻井的安全性和效率。
在应用方面,旋转导向钻井技术已经被广泛应用于复杂地质条件和水平井眼的钻井中。
通过对钻井工艺和设备的调整和优化,可以更好地满足不同地质条件下的钻井需求。
旋转导向钻井技术介绍

2020/9/5
1
主要内容
1. 旋转导向钻井技术概述 2. 井下旋转导向钻井系统分类 3. 典型的旋转导向钻井系统
(1)AutoTrak RCLS系统: Baker Hughes公司 (2)PowerDrive SRD系统:Schlumberger公司 (3) Geo-Pilot系统:Halliburton公司
②为稳定器设置了多个控制位置,采用钻井液脉冲遥控技术、电 子及液压技术对稳定器的径向位置进行控制。
29
PowerDrive 结构及工作参数
• 长度:16 ft [4.9 m] • 排量:500 - 1000 gpm [1900 - 3800 lpm] • 转速:40 - 220 rpm • 工具压降:少于100 psi [6 bar] • 最小钻头所需压降:500 psi [34 bar] • 现最高运行温度:250ºF [120º C] • 泥浆比重:7.5 - 20 ppg [0.9 - 2.4 sg] • LCM :使用MWD 指示
16
Application Areas
Directional / Geosteering wells in 8.1/2” - 12.1/4” hole size Where the operator wants:
– better hole cleaning, less circulation time, less wiper trips – extented run lengths by using PDC bits – better hole quality to ease logging and completion – superior geometrical steering & geosteering to maximise
钻井旋冲工具提速机理及结构设计
钻井旋冲工具提速机理及结构设计钻井旋冲工具是油气钻探中不可缺少的设备,它的钻井提速机理和结构设计对于钻井效率和质量有着重要的影响。
本文将对钻井旋冲工具提速机理进行分析,并探讨其结构设计的关键点。
一、钻井旋冲工具提速机理1. 旋转机理钻井旋冲工具在进行钻井作业时,主要通过旋转来实现对地层的穿透。
其旋转机理主要是通过转子的旋转来实现,通过转子上的齿轮传动,将旋转力传递到下部的钻头或是进给系统上,实现对地层的穿透。
2. 冲击机理在钻井作业中,地层的硬度不一,有时会遇到较硬的地层,此时需要通过冲击来实现对地层的穿透。
冲击机理主要是通过钻井旋冲工具内的冲击系统,通过气体或者液体的压缩和释放来实现对地层的冲击,提高钻井的效率。
3. 清洗机理钻井作业中,地层会产生较多的砂石或者岩屑,而这些砂石或者岩屑对钻井作业会产生阻碍,因此需要通过清洗机理来清洁地层。
清洗机理主要是通过钻井旋冲工具内的清洗系统,将清洁液体喷射到井底,将地层中的砂石或者岩屑冲洗出来。
以上就是钻井旋冲工具提速的机理,通过旋转、冲击和清洗三个机理的协同作用,实现对地层的高效穿透,提高钻井效率。
二、钻井旋冲工具结构设计1. 转子结构设计钻井旋冲工具中的转子是实现旋转机理的核心部件,因此其结构设计至关重要。
转子需要具有一定的强度和耐磨性,因为在钻井作业中会受到较大的旋转力和地层的摩擦。
转子的齿轮传动也需要考虑其精度和可靠性,以确保转动平稳和可靠。
钻井旋冲工具中的冲击系统需要具有较高的压缩和释放能力,以确保其对地层的冲击能够达到预期效果。
其结构设计需要考虑其气密性和耐压性,以确保在高压环境下能够正常工作,并且需要考虑其工作稳定性和寿命。
钻井旋冲工具的提速机理主要包括旋转、冲击和清洗三个机理的协同作用,通过这三个机理的协同作用实现对地层的高效穿透,提高了钻井效率。
钻井旋冲工具的结构设计也至关重要,其转子、冲击系统和清洗系统的设计都需要充分考虑其工作环境和工作稳定性,以确保其能够长时间稳定工作。
探讨石油定向井钻井中的旋转导向技术

探讨石油定向井钻井中的旋转导向技术石油定向井钻井中的旋转导向技术,是指通过利用钻杆和测斜仪等设备,根据地层情况,调整钻头的方向,使钻孔符合设计要求,达到预期的钻井效果。
在石油勘探开发中,定向井钻井技术在复杂地层条件下的应用越来越广泛,因此旋转导向技术在定向井钻井中起着重要的作用。
本文将着重探讨石油定向井钻井中的旋转导向技术的原理、方法和应用。
一、旋转导向技术的原理1.测斜仪测量原理测斜仪通过误差电源悬挂在井下,利用地磁测量方法来测量孔道或孔周地层和孔轴的方向,然后通过电缆传输数据到地面。
测斜仪中的磁敏传感器和加速度计感应地磁场和重力场的指向,然后通过数据传输到记录仪,最后分析数据,获取目标地层的信息。
2.旋转导向原理旋转导向原理是通过旋转钻柱,在地面控制测斜仪旋转角度,使其测量方向相对于地面保持稳定不变,从而实现在井下连续测量的目标井眼方向、孔斜和方位信息。
并根据上位机的数据计算,做出合理的钻头位移方向,从而保持井眼垂直或者按设计的轨迹方向钻井。
1.受控钻头旋转通过传统的受控钻头旋转技术来实现,就是通过调整钻井工具、钻头和管柱的旋转方向,使井眼朝向地质构造的方向。
2.自转模块技术自转模块技术是通过在钻杆中安装自转装置,实现钻杆在井下自转,并通过调整自转方向,使钻井孔斜度及方位满足设计要求。
3.测斜仪数据采集及处理通过在测斜仪上加装数据采集卡,将地面指令传输至井下测斜仪进行数据采集和处理,实现钻井的旋转导向。
1.复杂地质条件下的钻井在复杂地质条件下,如地层变化频繁、地质构造错综复杂等情况下,传统的定向钻井技术往往难以满足钻井设计要求。
而旋转导向技术由于其灵活性和精准度高,可以有效地应对这些挑战,提高钻井的成功率。
2.提高钻井效率旋转导向技术可以帮助钻井人员及时调整钻头的方向,使钻孔在设定的方向内保持,提高了钻井的效率和质量。
3.节约钻井成本由于旋转导向技术可以帮助钻井在较短的时间内完成目标孔,避免了不必要的多次调整,节约了钻井成本。
旋转导向钻井系统原理简介 (1)

“指引钻头”式旋转导向钻井系 统
“侧推钻头”式旋转导向钻井系 统
Bias the bit
导向 钻井
第四类旋转导向系统的原理
工具4的轨迹控制并不是三点定圆几何理论,而是 由钻头方向独立确定的。钻头设计成侧切能力很小, 并有一个柔性联结,该柔性联结把钻头与钻柱的弯矩 隔开。这种轨迹控制机理可以在小井眼内提供比其他 机理更高的造斜率。
导向钻井系统的发展史
向有 工线 具导 和螺 弯杆 接钻 头具 钻无 测线 量随 导 向 马 达 钻旋 井转 系导 统向
导向 钻井
第 一 口 定 向 井
1933年
滑动导向钻井的存在问题
滑动钻进 旋转钻进
导向 钻井
滑动钻进时的存在 问题:
1. 滑动困难; 2. 需保持定向; 3. 井眼不清洁; 4. 钻速很低; 5. 井眼扭曲; 6. 环空压力波动; 7. 钻柱粘卡;
AUTO-TRACK
非旋转套依靠反向电机驱动,使之相对于井眼不旋转,保持侧推钻头的力的方 向不变。非旋转套并非绝对不旋转,但工具自己可以测得非旋转套筒的旋转, 并随时调整三个“翼块”给出的侧推力的方向。
AUTO-TRACK
关键部分:非旋转套 整个钻柱在旋转,如何保证非旋转套不旋转? 非旋转套的内部,装有井下计算机、井斜传感器、液压控制、 支撑块机构等部分;
钻柱
柔性铰接
钻头轴
钻头
第四类旋转导向系统的原理
指引钻头式系统的井眼曲率计算: 令:
1 (D d ) 2
则:cos
R R L sin R
二式联立,可得:
L R 2
2
2
一种新的短半径旋转钻井系统
全机械式,无井下马达,无电子系统,可精 确地钻出9~18米曲率半径的短半径水平井。 弯曲段钻进需要8~24小时,垂深误差在 ±60cm以内。 钻弯曲段组合结构如图所示,包括: Amoco专利的抗涡动的偏心PDC钻头,钻头 短节,信息环,非旋转的偏心柔性套筒,下扭 矩壳,球销,上扭矩壳。 造斜原理是:钻头总是指向井眼曲率的切线 方向,即“指引钻头”(pointing the bit) 原理。两个接触点,一个在钻头上,一个在柔 性套筒的“耐磨板(Wear Pad)”上,两点控制 着钻头的倾角。钻头短节可以调节两点之间的 距离,从而控制井眼曲率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动旋转导向钻井工具结构原理及特点
[摘要] 自动旋转导向钻井工具弥补了滑动式导向钻井工具在定向井钻井,特别是在大位移井及长距离水平井的使用中暴露的缺点与不足。
浅显分析国内外在定向钻井工具技术差距,从结构原理和特点上出发阐述了自动旋转导向向钻井工具的。
[关键词] 自动旋转导向钻井工具
一.前言
现有的滑动式导向钻井工具在定向钻井,特别是在大位移井及长距离水平井的使用中暴露出不少缺点与不足。
自动旋转导向钻井工具可以弥补这些缺点,是目前定向钻井工具发展的一个热点及方向。
笔者据此介绍美国三家公司的自动旋转导向钻井工具的结构原理及特点。
针对现有定向钻井工具的缺点和不足,浅析今后旋转导向钻井工具结构设计的发展趋势。
迄今为止,定向钻井技术经历了三个里程碑:①利用造斜器(斜向器)定向钻井;
②利用井下马达配合弯接头定向钻井(造斜率是弯接头弯角、井下马达刚度和地层岩石硬度的函数);③利用导向马达(弯壳体井下马达)定向钻井(弯角点离钻头的距离近得多,因此产生的造斜率大)。
目前这三种定向钻井工具在世界各地被广泛使用,并促进了定向钻井技术的快速发展,使得今天人们能够应用斜井、丛式井、水平井技术开发油田。
二.目前国内定向钻井工具现状
随着石油工业的发展,为了获得更好的经济效益,需要开发深井、超深井、大位移井和长距离水平井,而且常常要在更复杂的地层,如高陡构造带钻井。
这些都对定向钻井工具提出了更高的要求。
目前以井下马达为主的定向钻井工具已不能满足现代钻井技术的要求,主要存在以下缺点和不足:
(1)利用井下马达导向时是滑动钻进,钻柱弯曲比旋转钻进时严重,井壁与钻柱间的轴向摩擦力大,使钻压很难加在钻头上。
在大延伸井和水平井中这一情况更严重,在极端情况下会造成钻柱屈服,因此它限制了水平井和大斜度井的深度。
(2)在地面对井下马达进行扭方位操作时,旋转摩擦、钻头扭矩、钻杆的扭转弹性变形等都妨碍了工具面的控制,从而影响井下马达在大斜度井和水平井中的使用。
(3)在导向钻进时,钻柱的扭转弹性变形会引起工具面角不稳定,从而导致井眼轨迹扭曲,进一步加大钻柱受到的摩擦力,同样限制了钻井深度。
(4)与旋转钻进相比,滑动钻井时岩屑排出困难,限制了钻速和可钻深度。
(5)与旋转钻进相比,滑动钻进钻速较低。
井下马达转速较高,降低了钻头和井下马达的使用寿命,也增加了起下钻的次数。
(6) 使用井下马达钻井容易引起卡钻。
(7) 滑动钻进与旋转钻进频繁转换会引起较大的井眼狗腿度,且随井斜曲率的增加而增加。
缺球形封头与筒体连接处
新开发的自动旋转导向钻井工具克服了以上缺点与不足,其特点是:
(1)具有在钻柱旋转情况下定向的能力;
(2)可以与井下马达一起使用;
(3)配有全系列标准的地层参数及钻井参数检测仪器;
(4)配有地面-井下双向通讯系统,可根据井下传来的数据,在不起钻的情况下从地面发出指令改变井眼轨迹;
(5)工具设计制造模块化、集成化;
(6)可以在150℃以上的高温井中使用;
(7)定向钻井时不需要特殊的钻井参数,可以保证最优的钻井过程;
(8)导向自动控制,以保证准确光滑的井眼轨迹。
三.国外主要的旋转导向工具结构及工作原理
国外多家石油工具公司都在致力于这一先进的定向钻井工具的研究,并取得了初步成果。
这里介绍美国三家公司的自动旋转导向钻井工具的结构及特点。
1.Baker Hughes公司的自动闭环旋转导向工具:
1993年,Agip.S.P.A和Baker Hughes Inteq开始开发和研制旋转导向工具。
工具包含地面与井下的双向通讯系统、导向系统和LWD(随钻测井)系统三个部分。
(1)地面与井下的双向通讯系统:此系统可使操作者在不停钻的情况下,用钻井液脉冲从地面向井下工具发出指令改变井眼轨迹、造斜率、方位改变率及降斜率等,指示井底发射器有选择地发送需要的信息。
为了能使地面指令向下传输,开
发了一项通过在井上调制排量来向下传递命令的新技术:立管上安装一个旁通触发器,可在地面把部分钻井液送回钻井液池,相应的流量变化导致井下发电机的电压变化,这样加载了信息的排量变化顺序就送到井下并在井下得到解释。
它可以把地层参数、井下温度、井眼轨迹参数、井底压力及工具的运行状态等数据用钻井液正脉冲传输到地面,并在地面接收译码。
此工具的上传数据采用了已经成功应用20多年的MWD中的井下遥控脉冲发射器。
(2)导向系统在井下构成一个闭环自动控制系统,可以在没有地面技术人员干预的情况下自动控制井斜和方位。
导向工具的执行机构有一不旋转导向套,中轴从导向套中间穿过与钻头连接,带动钻头随钻柱一起旋转,导向套与中轴通过轴承连接。
3个可伸缩棱块布置在导向套中,棱块由3个独立的液压活塞驱动,由液压阀控制有选择地伸出,压靠在井壁以产生需要的导向力,液压阀可以调节每个活塞内的压力,根据力的合成原理, 不仅可调节导向力的大小,还可把导向力调节到任意方向,所以此工具既可调节井眼轨迹方向,又可调节造斜率的大小,液压阀又是受井下微处理器的控制。
导向套内还有各种传感器,可测量井斜角、方位角及工具的工作状态。
1旋转钻柱;2液压控制阀;3控制器及传感器;4轴承;5钻头;6伸缩棱块;7静止导向套
实际上,不旋转导向套会因钻压、转速的不同而有所旋转,大约每半小时旋转2~3周。
因此,设置了电子检测装置时刻测量导向套的相对位置,然后由井下微处理器调整各个活塞内的压力。
这样,液压导向力也会随导向套的旋转作相应调整,保证导向力的大小及方向不会因导向套的转变在钻井时该系统可以设置两种模式。
①保持模式。
这种模式可使井眼轨迹保持一定的井斜角和方位角。
它在井下微处理器中设有造斜力或降斜力、变方位力、井斜角和方位角3个参数。
若井眼轨迹与预定的井斜角或方位角发生偏差,井下微处理器将用设定好的造斜力或变方位力来修正井眼轨迹,直到恢复预定的井斜角和方位角。
设定造斜力和变方位力主要是为了控制井眼狗腿度。
保持模式可同时施加造斜力和变方位力。
②导向模式。
这种钻进模式如同利用导向马达滑动钻进方式,可控制井眼轨迹的变化。
须设置导向棱块产生合力矢的大小和方向两个参数。
合力矢的方向相当于弯壳体马达的工具面角。
合力矢的大小是为了控制井眼轨迹的变化率。
与导向马达相比,该旋转导向工具能更精确地控制井眼轨迹,钻头侧向力和井眼狗腿度可由闭环系统连续控制。
(3)LWD(随钻测井)系统该系统能够使钻头得到精确的地质导向,并取代了有线测井。
它还具有GAMMA测井和电阻率测井功能。
2. Power Driver SRD系统井下导向工具的结构原理
1钻头;2活塞缸;3棱快;4旋转钻柱;5控制系统及测量系统
Power Driver SRD系统旋转导向工具的导向原理与BakerHughes公司的导向钻井工具类似,都是利用近钻头导向块的伸缩与井壁相互作用产生导向力,但是结构有所不同。
主要区别在于没有静止的导向套,3个导向棱块随钻柱一起旋转。
当需要在某个方向导向时,每转1周每个导向棱块都要在该方向上伸出1次,顶向井壁产生导向力,转离该方向后,棱块自动缩回。
其导向原理与结构如图3和图4所示。
如图4所示,它的控制器、旋转换向阀及测量机构都置于钻柱中间,可以保持相对静止。
旋转换向阀可以旋转到任意方向再保持静止,从而使导向棱块只有在旋转到某一方向时,钻井液才驱动棱块伸出达到控制井眼轨迹方向的目的。
它的导向力大小是固定的。
可通过控制导向棱块在某个方向上伸出的时间来调整井眼曲率。
3. Geo Pilot系统井下导向工具的结构原理
如图5所示, Sperry-Sun公司的Geo Pilot旋转导向钻井系统也是一种不旋转外筒式导向工具,但与Baker Hughes Inteq公司的Auto Trak RCLS系统和Schlumberger Anadrill公司的Power Driver SRD系统不同的是, Geo Pilot旋转导向钻井系统不是靠偏置钻头进行导向,而是靠不旋转外筒与旋转心轴之间的一套偏置机构使旋转心轴偏置,从而为钻头提供了一个与井眼轴线不一致的倾角,产生导向作用。
其偏置机构是一套由几个可控制的偏心圆环组合形成的偏心机构,当井下自动控制完成组合之后,该机构将相对于不旋转外套固定,从而始终将旋转心轴向固定方向偏置,为钻头提供一个方向固定的倾角。
4 结论
(1)Baker Hughes公司的自动旋转导向钻井工具完全解决了旋转钻进的导向问题,自动化程度高,带有随钻测井短节,可以实现地质导向,并已在多口井中实施了商业化使用,不失为一种较为理想的定向井钻井工具。
(2)旋转导向闭环钻井工具具有在旋转钻进时连续导向的能力,可以提高机械钻速和井眼净化效果,减少压差卡钻,降低钻井成本。
还具有三维井眼轨迹自动控制的能力,从而提高井眼轨迹的平滑度,降低扭矩和摩阻,也就能够增加井身的延伸长度。
旋转导向钻井技术有极大的实用价值和应用前景。
参考文献:
[1] 赵金海、唐代绪、朱全塔、徐丽霞.国外典型的旋转导向钻井系统.国外油田工程,2002年11月.
[2] 肖仕红、梁政.旋转导向钻井技术发展现状及展望.石油机械,2006年,第四期.
[3] 闫文辉、彭勇. 旋转导向钻井工具的研制原理.石油学报,2005年,第26卷,第五期。