直线一级倒立摆系统的PID控制器设计及其MATLAB仿真
基于MATLAB的直线一级倒立摆的PID控制研究

基于MATLAB的直线一级倒立摆的PID控制研究一、内容概述本文旨在研究基于MATLAB的直线一级倒立摆的PID控制策略。
倒立摆系统作为控制理论中的重要实验对象,具有非线性、不稳定性以及快速运动等特点,对于控制系统的设计与实现提出了较高要求。
PID控制作为一种经典的控制方法,在倒立摆系统中具有广泛的应用价值。
本文利用MATLAB软件平台,对直线一级倒立摆的PID控制进行深入研究和探讨。
文章对直线一级倒立摆系统的基本原理进行介绍,包括其物理模型、运动方程以及稳定性分析等方面。
在此基础上,详细阐述了PID 控制器的基本原理、参数整定方法及其在倒立摆系统中的应用。
通过对比不同PID参数下的控制效果,分析了PID控制器在倒立摆系统中的性能特点。
文章重点介绍了基于MATLAB的直线一级倒立摆PID控制系统的设计与实现过程。
利用MATLAB的Simulink仿真工具,搭建了直线一级倒立摆的仿真模型,并设计了PID控制器进行仿真实验。
通过不断调整PID控制器的参数,观察系统的动态响应和稳态性能,得到了较优的控制参数。
文章还讨论了在实际应用中可能遇到的挑战与问题,并提出了相应的解决方案。
针对倒立摆系统的非线性特性,可以采用模糊PID控制或神经网络PID控制等智能控制方法进行改进;针对干扰和噪声的影响,可以采用滤波技术或鲁棒控制策略来提高系统的抗干扰能力。
文章总结了基于MATLAB的直线一级倒立摆PID控制研究的主要成果和贡献,并展望了未来研究方向和应用前景。
通过本文的研究,不仅加深了对倒立摆系统和PID控制方法的理解,也为实际工程应用提供了有益的参考和借鉴。
1. 直线一级倒立摆系统的介绍直线一级倒立摆系统,作为一个复杂且典型的非线性不稳定系统,历来被视为控制理论教学及实验的理想平台。
它不仅能够有效地反映出控制中的多种问题,如非线性、鲁棒性、镇定等,还因其在多个领域中的实际应用价值而备受关注。
直线一级倒立摆系统主要由小车、摆杆等部件构成,它们之间通过自由连接形成一个整体。
一阶倒立摆控制系统设计matlab
一阶倒立摆控制系统设计matlab一、控制系统简介控制系统是指通过对某些物理系统或过程的改变以获取期望输出或行为的一种系统。
其中涉及到了对系统的建模、分析以及控制方法的选择和设计等多方面的问题。
控制系统可以通过标准的数学和物理模型来描述,并可以通过物理或者仿真实验进行验证。
本文将围绕一阶倒立摆控制系统设计和仿真展开。
主要内容包括:1.一阶倒立摆系统简介2.系统建模3.系统分析4.设计控制器5.仿真实验及结果分析一阶倒立摆(controlled inverted pendulum)是一种比较常见的控制系统模型。
它的系统模型简单,有利于系统学习和掌握。
一般而言,一阶倒立摆系统是由一个竖直的支杆和一个质量为$m$的小球组成的。
假设球只能在竖直方向上运动,当球从垂直平衡位置偏离时,支杆会向相反的方向采取动作,使得小球可以回到平衡位置附近。
为了控制一阶倒立摆系统,我们首先需要对其进行建模。
由于系统并不是非常复杂,所以建模过程相对简单。
假设支杆长度为$l$,支杆底端到小球的距离为$h$,支杆与竖直方向的夹角为$\theta$,小球的质量为$m$,地球重力为$g$,该系统的拉格朗日方程可以表示为:$L =\frac{1}{2}m\dot{h}^{2}+\frac{1}{2}ml^{2}\dot{\theta}^{2}-mgh\cos{\theta}-\frac{1}{2}I\dot{\theta}^{2}$$I$表示支杆的惯性矩,它可以通过支杆的质量、长度以及截面积等参数计算得出。
$h$和$\theta$分别表示小球和支杆的位置。
我们可以通过拉格朗日方程可以得出系统的动力学方程:$b$表示摩擦系数,$f_{c}$表示对支杆的控制力。
由于一阶倒立摆会发生不稳定的倾斜运动,即未受到外部控制时会继续倾斜。
我们需要对系统加上控制力,使得系统保持在稳定的位置上。
在进行控制器设计之前,我们需要对系统进行分析,以便更好地了解系统在不同条件下的特性表现。
直线一级倒立摆PID控制实验报告
直线一级倒立摆PID 控制实验报告一、实验目的本实验的目的是让实验者理解并掌握 PID 控制的原理和方法,并应用于直线一级倒立摆的控制,PID 控制并不需要对系统进行精确的分析,因此我们采用实验的方法对系统进行控制器参数的设置。
二、实验设备直线一级倒立摆;安装有MATLAB 软件的PC 机;运动控制卡主机箱。
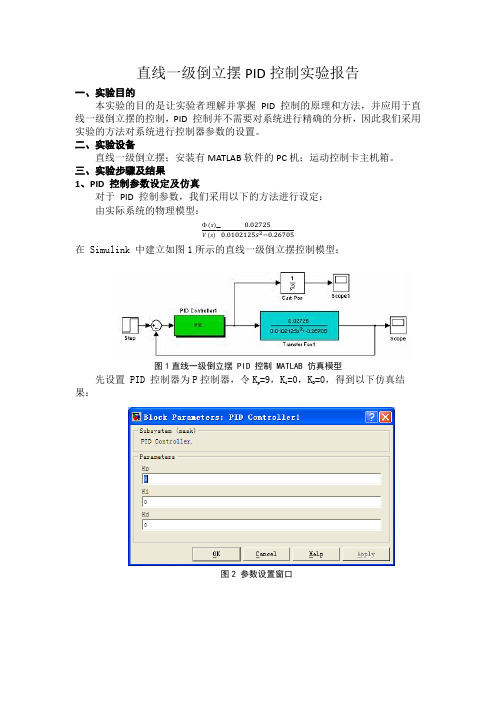
三、实验步骤及结果1、PID 控制参数设定及仿真对于 PID 控制参数,我们采用以下的方法进行设定:由实际系统的物理模型:(s)V (s)=0.027250.0102125s 2−0.26705 在 Simulink 中建立如图1所示的直线一级倒立摆控制模型:图1直线一级倒立摆 PID 控制 MATLAB 仿真模型先设置 PID 控制器为P 控制器,令K p =9,K i =0,K D =0,得到以下仿真结果:图2 参数设置窗口图3直线一级倒立摆P控制仿真结果图(K p=9)从图3中可以看出,控制曲线不收敛,因此增大控制量,令Kp =50,Ki=0,KD=0,得到以下仿真结果:图4直线一级倒立摆P控制仿真结果图(K p=50)从图4中可以看出,闭环控制系统持续振荡,周期约为 0.6s。
为消除系统的振荡,增加微分控制参数KD ,令 Kp=50, Ki=0, KD=16 ,得到仿真结果如下:图5直线一级倒立摆PD控制仿真结果图(K p=50,K D=16)从图5中可以看出,系统稳定时间过长,大约为7秒,因此再增加微分控制参数KD ,令:Kp=50, Ki=4, KD=16,仿真得到如下结果:图6直线一级倒立摆 PID 控制仿真结果图(K p=50,K i=4,K D=16)由于 PID 控制器为单输入单输出系统,所以只能控制摆杆的角度,并不能控制小车的位置,所以小车会往一个方向运动。
2、PID 控制实验1) 打开直线一级倒立摆 PID 控制界面入下图6所示:图6直线一级倒立摆 MATLAB 实时控制界面2) 双击"PID"模块进入 PID 参数设置,如下图7所示:图7 参数设置窗口把仿真得到的参数输入 PID 控制器,保存参数。
一阶直线倒立摆双闭环PID控制仿真报告

目录摘要 (2)一、一阶倒立摆系统建模 (3)1、对象模型 (3)2、电动机、驱动器及机械传动装置的模型 (4)二、双闭环PID控制器设计 (5)1、仿真验证 (6)2、内环控制器的设计 (9)3、系统外环控制器设计 (12)三、仿真实验 (15)1、绘图子程序 (15)2、仿真结果 (16)四、结论 (18)摘要本报告旨在借助Matlab 仿真软件,设计基于双闭环PID 控制的一阶倒立摆控制系统。
在如图0.1所示的“一阶倒立摆控制系统”中,通过检测小车的位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC )完成。
图0.1 一阶倒立摆控制系统分析工作原理,可以得出一阶倒立摆系统原理方框图:图0.2 一阶倒立摆控制系统动态结构图本报告将借助于“Simulink 封装技术——子系统”,在模型验证的基础上,采用双闭环PID 控制方案,实现倒立摆位置伺服控制的数字仿真实验。
一、一阶倒立摆系统建模1、对象模型如图1.1所示,设小车的质量为m 0,倒立摆均匀杆的质量为m ,摆长为2l ,摆的偏角为θ,小车的位移为x ,作用在小车上的水平方向的力为F ,O 1为摆角质心。
θxyOFF xF x F yF yllxO 1图1.1 一阶倒立摆的物理模型根据刚体绕定轴转动的动力学微分方程,转动惯量与角加速度乘积等于作用于刚体主动力对该轴力矩的代数和,则 1)摆杆绕其中心的转动方程为θθθcos sin y l F l F J x-= (1-1) 2)摆杆重心的水平运动可描述为)sin (22x θl x dtd m F += (1-2)3)摆杆重心在垂直方向上的运动可描述为)cos (22y θl dtd m mg F =- (1-3)4)小车水平方向上的运动可描述为220dtxd m F F x =- (1-4)由式(1-2)和式(1-4)得F ml x m m =⋅-⋅++)sin (cos )(20θθθθ (1-5) 由式(1-1)、(式1-2)和式(1-3)得θθθsin g cos 2ml x ml ml J =⋅++ )( (1-6) 整理式(1-5)和式(1-6),得⎪⎪⎩⎪⎪⎨⎧++-+-⋅+⋅=-++-⋅+++=))((cos sin )(cos sin cos cos ))((cos sin sin )()(x 2022202222220222222m l J m m l m m l m m l m F m l l m m m m l J g l m m l J lm F m l J θθθθθθθθθθθθ(1-7) 以上式1-7为一阶倒立摆精确模型。
针对直线一级倒立摆的PID控制系统设计
沈阳航空航天大学课程设计(论文)题目针对直线一级倒立摆的PID控制系统设计班级 94070201学号 *************学生姓名农夫三拳指导教师沈阳航空航天大学课程设计任务书课程名称计算机控制技术课程设计院(系)自动化学院专业自动化班级9407201 学号2009040702020 姓名农夫三拳课程设计题目针对直线一级倒立摆的PID控制系统设计课程设计时间: 2012 年7 月9 日至2012 年7 月20日课程设计的内容及要求:1. 内容以直线一级倒立摆实验平台为实验对象,设计一个计算机控制的PID控制系统。
保证倒立摆的摆杆垂直于水平面。
2. 要求(1)制定设计方案,并绘制出系统工作框图。
(2)按要求设计PID控制算法,并编写程序。
(3)用matlab进行程序设计与调试并进行仿真。
(4)通过直线一级倒立摆实验平台检验PID控制器的实际控制效果。
(5)撰写一篇6000~8000字左右的课程设计报告。
指导教师年月日负责教师年月日学生签字年月日目录0. 前言 (1)1. 倒立摆数学模型和编码器基本理论 (2)2. 方案设计 (5)3. 硬件电路的工作原理 (6)3.1PID控制模块 (6)3.2real control模块 (6)4. 软件编程 (7)5. matlab仿真及系统调试和结果分析 (8)6. 结论及进一步设想 (13)参考文献 (14)附录1 元件清单 (15)课设体会 (16)针对直线一级倒立摆的PID控制系统设计农夫三拳沈阳航空航天大学自动化学院摘要:倒立摆系统的控制是控制理论应用的一个典型范例,其结构简单、成本较低,便于用模拟或数字方法进行控制。
虽然其结构形式多种多样,但无论何种结构,就其本身而言,都是一个非最小相位、多变量、绝对不稳定的非线性系统。
由于倒立摆系统的绝对不稳定性,必须采取有效的措施稳定它。
其控制方法在军工、航天、机器人领域和一般工业过程中都有着广泛的用途。
直线一级倒立摆系统的PID控制算法设计
摘要直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一。
设计直线一级倒立摆前,首先要应清楚直线一级倒立摆的定义及它的特性,其次用数学建模的方法建立直线一级倒立摆模型。
再次PID控制器的结构与参数设计,将直线一级倒立摆当作简单的单输入单输出系统(忽略了小车位移的控制),采用了 PID控制器设计方法进行了控制器结构设计和参数设计。
确定PID控制器主要参数KP、KI、KD,通过改变这三个参数的值,使直线一级倒立摆由开环不稳定系统变为闭环稳定系统。
直线一级倒立摆系统在PID控制器下用MATLAB进行仿真,通过改变控制器PID主要参数,使得仿真曲线更接近理论曲线。
这些便是直线一级倒立摆系统的PID控制算法设计的主要内容。
关键词:直线一级倒立摆;Matlab仿真;PID控制ABSTRACTInverted pendulum linear 1-stage stands upside down suspends is composed by the translation module and the level pendulum mass module, is most common stands upside down suspends one Front the design straight line level stands upside down suspends, first must be supposed the clear straight line level to stand upside down the definition and its characteristic which suspends, next stands upside down with mathematics modelling method establishment straight line level suspends the model. Once more the PID controller structure and the parameter design, stood upside down Inverted pendulum linear 1-stage suspends the regard simple single input list output system (to neglect car displacement control), used the PID controller design method to carry on the controller structural design and the parameter design. Determined PID controller main parameter KP, KI, KD, through change these three parameters the value, causes the straight line level to stand upside down suspends becomes the closed loop stable system by the split-ring unstable system. Inverted pendulum linear 1-stage stands upside down suspends the system to carry on the simulation under the PID controller with MATLAB, through the change controller PID main parameter, causes the simulation curve closer theoretical curve.These then are the straight line level stands upside down suspends the system the PID control algorithm design primary coverage.Keywords:Inverted pendulum linear;Matlab Simulation; PID control目录第1章绪论 (1)第2章倒立摆系统 (2)2.1 系统的组成 (3)2.1.1 倒立摆本体 (3)2.1.2 电控箱 (4)2.1.3 电机 (4)2.1.4 编码器 (4)2.1.5 控制卡 (5)2.2 系统使用说明 (5)2.2.1 直线一级摆硬件操作系统 (5)2.2.2 一级摆软件操作说明 (5)第3章自动控制及MATLAB软件介绍 (7)3.1自动控制概念 (7)3.2 自动控制系统的类型 (8)3.2.1 随机系统与自动调整系统 (8)3.2.2 线性系统和非线性系统 (9)3.2.3 连续系统和离散系统 (9)3.2.4 单输入单输出系统和多输入多输出系统 (9)3.2.5 确定系统与不确定系统 (9)3.2.6 集中参数系统和分布参数系统 (9)3.3 自动控制理论概要 (10)3.3.1 自动控制系统所要分析的问题 (10)3.3.2 自动控制系统的设计问题 (10)3.4 MATLAB实验软件 (10)3.5.1 MATLAB的基本介绍 (11)3.5.2 MATLAB程序设计基础 (12)第4章 PID控制 (13)4.1 PID控制原理 (13)4.2 数字PID控制 (14)4.2.1 位置式PID控制算法 (14)4.2.2 增量式PID控制算法 (15)4.3 常见的PID控制系统 (15)4.3.1 串级PID控制 (15)4.3.2 纯滞后系统的大林控制算法 (16)4.3.3 纯滞后系统的smith控制算法 (17)第5章直线一级倒立摆的牛顿—欧拉方法建模 (19)5.1 微分方程的推导 (19)5.2 传递函数 (21)5.3 状态方程 (21)5.4 实际系统模型 (23)5.5 采用MATLAB语句形式进行仿真 (24)第6章直线一级倒立摆控制器设计及仿真 (27)6.1 PID参数的调整 (28)6.2 PID控制回路运行 (28)6.3直线一级倒立摆PID控制器设计 (29)6.4直线一级倒立摆PID控制器设计MATLAB仿真 (32)结论 (37)参考文献 (38)致谢 (39)附录 (40)第1章绪论计算机的诞生和发展给自动控制增添了先进的工具,现代控制理论的发展,又给自动控制提供了新的理论支柱。
基于MATLAB的PID控制器参数整定及仿真

基于MATLAB的PID控制器参数整定及仿真PID控制器是一种经典的控制器,在工业自动化控制系统中广泛应用。
其主要功能是根据系统的误差信号,通过调整输出信号的比例、积分和微分部分来减小误差,并达到系统的稳定控制。
PID控制器参数整定是指确定合适的比例常数Kp、积分常数Ki和微分常数Kd的过程。
本文将介绍基于MATLAB的PID控制器参数整定及仿真的方法。
首先,在MATLAB中建立一个包含PID控制器的模型。
可以通过使用MATLAB的控制系统工具箱来实现这一过程。
在工具箱中,可以选择合适的建模方法,如直接设计模型、积分节点模型或传输函数模型。
通过这些工具,可以方便地建立控制系统的数学模型。
其次,进行PID控制器参数整定。
PID控制器参数整定的目标是通过调整比例常数Kp、积分常数Ki和微分常数Kd,使系统的响应特性达到最佳状态。
常用的PID参数整定方法有经验法、试误法、Ziegler-Nichols方法等。
1.经验法:根据系统的特性和经验,选择合适的PID参数。
这种方法常用于初步整定,但可能需要根据实际情况调整参数。
2.试误法:通过逐步试验和调整PID参数,使系统的输出响应逐渐接近期望值,从而达到最佳控制效果。
3. Ziegler-Nichols方法:该方法是一种经典的系统辨识方法,通过测试系统的临界稳定性,得到系统的传递函数参数,并据此计算出合适的PID参数。
最后,进行PID控制器参数整定的仿真。
在MATLAB中,可以通过使用PID模块进行仿真。
可以输入相应的输入信号和初始参数,观察系统的输出响应,并通过调整参数,得到最佳的控制效果。
总结起来,基于MATLAB的PID控制器参数整定及仿真的过程包括:建立控制系统模型、选择PID参数整定方法、进行PID参数整定、进行仿真实验。
PID控制器参数整定的好坏直接影响控制系统的工作性能。
通过基于MATLAB的仿真实验,可以方便地调整和优化控制系统的PID参数,提高系统的响应速度、稳定性和抗干扰性能。
一级倒立摆课程设计--倒立摆PID控制及其Matlab仿真
一级倒立摆课程设计--倒立摆PID控制及其Matlab仿真倒立摆PID控制及其Matlab仿真学生姓名:学院:电气信息工程学院专业班级:专业课程:控制系统的MATLAB仿真与设计任课教师:2014 年 6 月 5 日倒立摆PID控制及其Matlab仿真Inverted Pendulum PID Control and ItsMatlab Simulation摘要倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统,对倒立摆的控制研究无论在理论上和方法上都有深远的意义。
本论文以实验室原有的直线一级倒立摆实验装置为平台,重点研究其PID 控制方法,设计出相应的PID控制器,并将控制过程在MATLAB上加以仿真。
本文主要研究内容是:首先概述自动控制的发展和倒立摆系统研究的现状;介绍倒立摆系统硬件组成,对单级倒立摆模型进行建模,并分析其稳定性;研究倒立摆系统的几种控制策略,分别设计了相应的控制器,以MATLAB为基础,做了大量的仿真研究,比较了各种控制方法的效果;借助固高科技MATLAB实时控制软件实验平台;利用设计的控制方法对单级倒立摆系统进行实时控制,通过在线调整参数和突加干扰等,研究其实时性和抗千扰等性能;对本论文进行总结,对下一步研究作一些展望。
关键词:倒立摆;PID控制器;MATLAB仿真设计报告正文1.简述一级倒立摆系统的工作原理;倒立摆是一个数字式的闭环控制系统,其工作原理为:角度、位移信号检测电路获取后,由微分电路获取相应的微分信号。
这些信号经A/D转换器送入计算机,经过计算及内部的控制算法解算后得到相应的控制信号,该信号经过D/A变换、再经功率放大由执行电机带动皮带卷拖动小车在轨道上做往复运动,从而实现小车位移和倒立摆角位移的控制。
2.依据相关物理定理,列写倒立摆系统的运动方程;2lO1小车质量为M ,倒立摆的质量为m ,摆长为2l ,小车的位置为x ,摆的角度为θ,作用在小车水平方向上的力为F ,1O 为摆杆的质心。
控制系统课程设计---直线一级倒立摆控制器设计
H a r b i n I n s t i t u t e o f T e c h n o l o g y课程设计说明书(论文)课程名称:控制系统设计课程设计设计题目:直线一级倒立摆控制器设计院系:班级:设计者:学号:指导教师:罗晶周乃馨设计时间:2013.9.2——2013.9.13哈尔滨工业大学教务处哈尔滨工业大学课程设计任务书*注:此任务书由课程设计指导教师填写。
第一章 直线一级倒立摆数学模型的推导及建立1.1直线一阶倒立摆数学模型的推导系统建模可以分为两种:机理建模和实验建模。
实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出,应用数学手段建立起系统的输入-输出关系。
这里面包括输入信号的设计选取,输出信号的精确检测,数学算法的研究等等内容。
机理建模就是在了解研究对象的运动规律基础上,通过物理、化学的知识和数学手段建立起系统内部的输入-状态关系。
对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难。
但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。
下面我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型。
在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统. 下图是系统中小车和摆杆的受力分析图。
其中,N 和P 为小车与摆杆水平和垂直方向的分量。
b px图1-1(a )小车隔离受力图 (b )摆杆隔离受力图本系统相关参数定义如下:M : 小车质量 m :摆杆质量b :小车摩擦系数 l :摆杆转动轴心到杆质心的长度 I :摆杆惯量 F :加在小车上的力x :小车位置 φ:摆杆与垂直向上方向的夹角θ:摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向。
倒立摆系统建模及MATLAB仿真

倒立摆系统的建模及MATLAB仿真通过建立倒立摆系统的数学模型,应用状态反馈控制配置系统极点设计倒立摆系统的控制器,实现其状态反馈,从而使倒立摆系统稳定工作。
之后通过MA TLAB 软件中Simulink工具对倒立摆的运动进行计算机仿真,仿真结果表明,所设计方法可使系统稳定工作并具有良好的动静态性能。
倒立摆系统是1个经典的快速、多变量、非线性、绝对不稳定系统,是用来检验某种控制理论或方法的典型方案。
倒立摆控制理论产生的方法和技术在半导体及精密仪器加工、机器人技术、导弹拦截控制系统和航空器对接控制技术等方面具有广阔的开发利用前景。
因此研究倒立摆系统具有重要的实践意义,一直受到国内外学者的广泛关注。
本文就一级倒立摆系统进行分析和研究,建立倒立摆系统的数学模型,采用状态反馈极点配置的方法设计控制器,并应用MA TLAB 软件进行仿真。
1 一级倒立摆系统的建模1. 1 系统的物理模型如图1 所示,在惯性参考系下,设小车的质量为M ,摆杆的质量为m ,摆杆长度为l ,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为θ,作用在小车上的水平控制力为f 。
这样,整个倒立摆系统就受到重力,水平控制力和摩擦力的3 外力的共同作用。
图1 一级倒立摆物理模型1. 2 系统的数学模型在系统数学模型中,本文首先假设:(1) 摆杆为刚体。
(2)忽略摆杆与支点之间的摩擦。
(3)忽略小车与导轨之间的摩擦。
然后根据牛顿第二运动定律,求得系统的运动方程为:方程(1) , (2) 是非线性方程,由于控制的目的是保持倒立摆直立,在施加合适的外力条件下,假定θ很小,接近于零是合理的。
则sinθ≈θ,co sθ≈1 。
在以上假设条件下,对方程线性化处理后,得倒立摆系统的数学模型:1. 3 系统的状态方程以摆角θ,角速度θ',小车的位移x ,速度x'为状态变量,输出为y 。
即令:则一级倒立摆系统的状态方程为:2 控制器设计及MATLAB 仿真2. 1 极点配置状态反馈的基本原理图2 状态反馈闭环控制系统极点配置的方法就是通过一个适当的状态反馈增益矩阵的状态反馈方法,将闭环系统的极点配置到任意期望的位置。
直线一级倒立摆MATLAB仿真报告

1便携式倒立摆实验简介倒立摆装置被公认为是自动控制理论中的典型试验设备,是控制理论教学和科研中不可多得的典型物理模型。
本实验基于便携式直线一级倒立摆试验系统研究其稳摆控制原理。
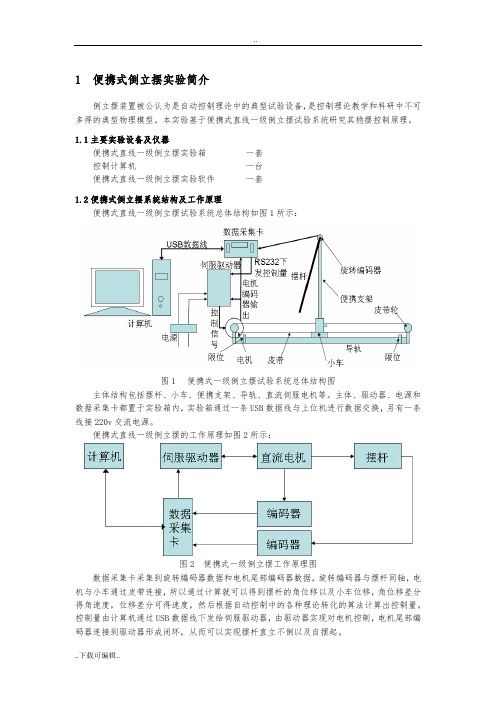
1.1主要实验设备及仪器便携式直线一级倒立摆实验箱一套控制计算机一台便携式直线一级倒立摆实验软件一套1.2便携式倒立摆系统结构及工作原理便携式直线一级倒立摆试验系统总体结构如图1所示:图1便携式一级倒立摆试验系统总体结构图主体结构包括摆杆、小车、便携支架、导轨、直流伺服电机等。
主体、驱动器、电源和数据采集卡都置于实验箱内,实验箱通过一条USB数据线与上位机进行数据交换,另有一条线接220v交流电源。
便携式直线一级倒立摆的工作原理如图2所示:图2 便携式一级倒立摆工作原理图数据采集卡采集到旋转编码器数据和电机尾部编码器数据,旋转编码器与摆杆同轴,电机与小车通过皮带连接,所以通过计算就可以得到摆杆的角位移以及小车位移,角位移差分得角速度,位移差分可得速度,然后根据自动控制中的各种理论转化的算法计算出控制量。
控制量由计算机通过USB数据线下发给伺服驱动器,由驱动器实现对电机控制,电机尾部编码器连接到驱动器形成闭环,从而可以实现摆杆直立不倒以及自摆起。
2便携式倒立摆控制原理方框图便携式倒立摆是具有反馈功能的闭环系统,其控制目标是实现在静态和动态下的稳摆。
∅g=0当输入量为理想摆角,即时,偏差为0,控制器不工作;当输入量不为理想摆角时,偏差存在,控制器做出决策,驱动电机,使小车摆杆系统发生相应位移,输出的摆角通过角位移传感器作用于输出量,达到减小偏差的目的。
根据控制原理绘制出控制方框图如图3所示:图3 便携式一级倒立摆控制原理方框图3建立小车-摆杆数学模型便携式倒立摆系统主要由小车、摆杆等组成,它们之间自由连接。
小车可以在导轨上自由移动,摆杆可以在铅垂的平面内自由地摆动。
在忽略了空气阻力和各种摩擦之后,可将便携式倒立摆系统抽象成小车和匀质杆组成的刚体系统,在惯性坐标内应用经典力学理论建立系统的动力学方程,采用力学分析方法建立小车-摆杆的数学模型。
单级倒立摆控制系统设计及MATLAB中的仿真

单级倒立摆控制系统设计及simulink仿真摘要:倒立摆系统是一个典型的多变量、非线性、强藕合和快速运动的自然不稳定系统。
因此倒立摆在研究双足机器人直立行走、火箭发射过程的姿态调整和直升机飞行控制领域中有重要的现实意义,相关的科研成果己经应用到航天科技和机器人学等诸多领域。
单级倒立摆系统是一种广泛应用的物理模型。
控制单级倒立摆载体的运动是保证倒立摆稳定性的关键因素。
为了避免常用的物理反馈分析方法和运动轨迹摄像制导控制方法的某些缺点,本文从力学的角度提出对倒立摆的运动进行纯角度制导分析,完成了对倒立摆载体的角度制导运动微分方程的数学建模,设计了该模型的模糊控制系统,并利用 Matlab\simulink软件工具对倒立摆的运动进行了计算机仿真。
实验表明,这种模糊控制配合代数解析方法的运算速度和计算机仿真的效果均较物理反馈制导控制方法有了一定的提高。
该方法可以有效地改善单级倒立摆控制系统的性能。
本论文的主要工作是研究了直线一级倒立摆系统的模糊控制问题,用Matlab和Simulink对一级倒立摆模糊控制系统进行了仿真,验证了设计的可行性。
本文论述了一级倒立摆数学建模方法,推导出他们的微分方程,以及线性化后的状态方程。
讨论了单级倒立摆系统的模糊控制方法和操作步骤。
用Simulink实现了单级倒立摆模糊控制仿真系统,分别给出一级倒立摆系统控制量的响应曲线。
通过仿真说明控制器的有效性和实现性。
关键词:单级倒立摆;仿真;模糊控制;运动;建模;SimulinkDesign of single stage inverted pendulum control systemand Simulink simulationAbstract: inverted pendulum system is unstable system with a typical multi variable, nonlinear, strong coupled and fast motion. So the research on the attitude adjustment of the double foot robot and the attitude adjustment of the rocket launching process and the helicopter flight control field have practical,significance. The related scientific research achievements have been applied to many fields such as aerospace science and robotics. Single inverted pendulum system is a widely used physical model. Controlling the movement of the single inverted pendulum is the key factor to guarantee the stability of the inverted pendulum. In order to avoid some shortcomings of common physical feedback analysis method and motion trajectory camera guidance control method, this paper presents a pure angle guidance analysis on the motionof the inverted pendulum, and designs the fuzzy control system of the model. Experimental results show that the operation speed and computer simulation of this kind of fuzzy control combined with algebraic analysis method are improved by the physical feedback control method. This method can effectively improve the performance of a single stage inverted pendulum control system. In this paper, the main work of this paper is to study the fuzzy control of a linear inverted pendulum system, and the Matlab and Simulink to simulate the fuzzy control system of a single inverted pendulum, verify the feasibility of the design. And a mathematical modeling method of an inverted pendulum is described, their differential equations are derived, and the equation of state is linearized. The fuzzy control method and operation steps of single stage inverted pendulum system are discussed. Using Simulink to realize the fuzzy control simulation system of a single inverted pendulum, the response curve of the control of an inverted pendulum system is given. The effectiveness and the implementation of the controller are illustrated by simulation.Keywords: Inverted pendulum; Simulation; Fuzzy control; Motion; modeling; Simulink 引言倒立摆系统是研究控制理论的一种典型实验装置,具有成本低廉,结构简单,物理参数和结构易于调整的优点,是一个具有高阶次、不稳定、多变量、非线性和强藕合特性的不稳定系统。
一级倒立摆课程设计--倒立摆PID控制及其Matlab仿真
一级倒立摆课程设计--倒立摆PID控制及其Matlab仿真倒立摆PID控制及其Matlab仿真学生姓名:学院:电气信息工程学院专业班级:专业课程:控制系统的MATLAB仿真与设计任课教师:2014 年 6 月 5 日倒立摆PID控制及其Matlab仿真Inverted Pendulum PID Control and ItsMatlab Simulation摘要倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统,对倒立摆的控制研究无论在理论上和方法上都有深远的意义。
本论文以实验室原有的直线一级倒立摆实验装置为平台,重点研究其PID 控制方法,设计出相应的PID控制器,并将控制过程在MATLAB上加以仿真。
本文主要研究内容是:首先概述自动控制的发展和倒立摆系统研究的现状;介绍倒立摆系统硬件组成,对单级倒立摆模型进行建模,并分析其稳定性;研究倒立摆系统的几种控制策略,分别设计了相应的控制器,以MATLAB为基础,做了大量的仿真研究,比较了各种控制方法的效果;借助固高科技MATLAB实时控制软件实验平台;利用设计的控制方法对单级倒立摆系统进行实时控制,通过在线调整参数和突加干扰等,研究其实时性和抗千扰等性能;对本论文进行总结,对下一步研究作一些展望。
关键词:倒立摆;PID控制器;MATLAB仿真设计报告正文1.简述一级倒立摆系统的工作原理;倒立摆是一个数字式的闭环控制系统,其工作原理为:角度、位移信号检测电路获取后,由微分电路获取相应的微分信号。
这些信号经A/D转换器送入计算机,经过计算及内部的控制算法解算后得到相应的控制信号,该信号经过D/A变换、再经功率放大由执行电机带动皮带卷拖动小车在轨道上做往复运动,从而实现小车位移和倒立摆角位移的控制。
2.依据相关物理定理,列写倒立摆系统的运动方程;2lO1小车质量为M ,倒立摆的质量为m ,摆长为2l ,小车的位置为x ,摆的角度为θ,作用在小车水平方向上的力为F ,1O 为摆杆的质心。
PID控制的一阶倒立摆控制系统设计
PID控制的一阶倒立摆控制系统设计一阶倒立摆控制系统是一种常见的控制系统,通过PID控制器对倒立摆系统进行稳定控制,使其在一定的时间内达到平衡位置。
本文将详细介绍一阶倒立摆控制系统的设计流程和方法。
1.引言一阶倒立摆控制系统是一类具有非线性动力学特性的控制系统。
其基本结构包含一个摆杆和一个摆杆在垂直方向上运动的小车。
该控制系统的目标是通过调节小车的运动,使摆杆能够在垂直方向上保持平衡。
为了实现这个目标,我们需要设计一个有效的控制方案,并使用PID控制器对系统进行控制。
2.模型建立首先,我们需要建立一阶倒立摆系统的数学模型。
假设摆杆的长度为L,摆杆与水平线的夹角为θ,小车与水平线的位置为x,小车与水平线的速度为v。
根据牛顿运动定律和平衡条件,可以得到如下模型:m*x'=m*a=F(1)M*x'' = -F*l*sin(θ) - b*v (2)I*θ'' = F*l*cos(θ) - M*g*l*sin(θ) (3)其中,m是小车的质量,M是摆杆的质量,l是摆杆的长度,b是摩擦系数,g是重力加速度,I是摆杆的转动惯量。
将式(3)对时间t求导得到:I*θ''' = -b*l*θ' - M*g*l*cos(θ) (4)3.控制设计为了设计PID控制器,我们需要首先将系统模型线性化。
可以将非线性的动力学模型近似为线性模型,并在静态平衡点附近进行线性化。
静态平衡点是系统的平衡位置,满足以下条件:x=0,v=0,θ=0,θ'=0。
我们可以对系统模型进行泰勒级数展开,保留一阶项,得到如下线性化模型:m*x'=F(5)M*x''=-F*l*θ(6)I*θ''=F*l(7)经过线性化,系统的动力学模型变为了一组线性微分方程。
接下来,我们使用PID控制器对系统进行控制。
4.PID控制器设计PID控制器由比例项、积分项和微分项组成,用于校正系统输出与目标值之间的差异。
毕业设计(论文)-基于matlab的一级倒立摆控制器设计与仿真[管理资料]
![毕业设计(论文)-基于matlab的一级倒立摆控制器设计与仿真[管理资料]](https://img.taocdn.com/s3/m/8eadd625c1c708a1294a44b8.png)
摘要倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的高阶不稳定系统,它是检验各种新型控制理论和方法有效性的典型装置。
近年来,许多学者对倒立摆系统进行广泛地研究。
本文研究了直线一级倒立摆的控制问题。
首先阐述了倒立摆系统控制的研究发展过程和现状,接着介绍了倒立摆系统的结构并详细推导了一级倒立摆的数学模型。
本文分别用极点配置、LQR最优控制设计了不同的控制器,极点配置法通过设计状态反馈控制器将多变量系统的闭环系统极点配置在期望的位置上,从而使系统满足要求的瞬态和稳态性能指标。
最优控制理论主要是依据庞特里亚金的极值原理,通过对性能指标的优化寻找可以使目标极小的控制器。
若取状态变量的二次型函数的积分做为系统的性能指标,则称为线性系统二次型性能指标的最优控制。
通过比较和MATLAB仿真,验证了所设计的控制器的有效性、稳定性和抗干扰性。
关键词:单级倒立摆;MATLAB;控制器设计;极点配置;LQRABSTRACTInverted pendulum is a typical multi-variable, non-linear, strong coupling and rapid movement of high-end system instability, It is testing various new control theory and methods of the effectiveness of the typical devices. In recent years, many scholars of the inverted pendulum extensive study.In this paper, a straight two inverted pendulum control on the inverted pendulum control of the development process and the status quo, then introduced the inverted pendulum system and the detailed structure of the two inverted pendulum is derived a mathematical model. In this paper, with pole placement, LQR optimal control design a different controller, By comparing and MATLAB simulation, verified the effectiveness ,stability and anti-jamming of the controller.Pole-zero configuration can configure the closed-loop system poles of multi-variable system in the desired position, by designing of the state feedback controller,so that to make the system meets the requirements of the transient and steady state performance indicators.Optimal control theory is mainly based on the Pontryagin maximum principle, by the optimization of the performance indicators to find the minimal goal of the taking the integral of the quadratic function of state variables as the system of performance indicators, called the as the linear quadratic performance index of optimal control.Key words : Single stage Inverted pendulum; MATLAB; Controller design; Zero-pole ; LQR目录摘要 (1)ABSTRACT (2)1 绪论 0控制理论的发展 0倒立摆系统简介及其研究意义 0倒立摆研究的发展现状及其主要控制方法 (1)研究目标 (2)2 直线一阶倒立摆数学模型的建立 (4)倒立摆系统的物理结构与建模 (4)系统参数设定 (7)系统能控性与能观性 (8)3 极点配置控制方案的设计 (9)极点配置理论 (9)极点配置算法 (10)极点配置控制方案的设计 (11)4 线性二次型最优控制(LQR)方案的设计 (15)最优控制的起源和发展 (15)线性二次型最优控制原理 (15)最优控制矩阵的设计 (18)5 控制系统的MATLAB仿真 (22)MATLAB软件介绍 (22)极点配置控制方案的仿真 (23)线性二次型最优控制(LQR)方案的仿真 (26)干扰条件下控制系统的仿真 (27)S函数模拟动画设计 (28) (31)6 总结与展望 (32)参考文献 (35)致谢 (36)附录 (37)1 绪论控制理论的发展控制理论发展至今已有100多年的历史,随着现代科学技术的发展,它的应用也越来越广泛。
直线一级倒立摆MATLAB仿真报告
1便携式倒立摆实验简介倒立摆装置被公认为是自动控制理论中的典型试验设备,是控制理论教学和科研中不可多得的典型物理模型。
本实验基于便携式直线一级倒立摆试验系统研究其稳摆控制原理。
1.1主要实验设备及仪器便携式直线一级倒立摆实验箱一套控制计算机一台便携式直线一级倒立摆实验软件一套1.2便携式倒立摆系统结构及工作原理便携式直线一级倒立摆试验系统总体结构如图1所示:图1 便携式一级倒立摆试验系统总体结构图主体结构包括摆杆、小车、便携支架、导轨、直流伺服电机等。
主体、驱动器、电源和数据采集卡都置于实验箱内,实验箱通过一条USB数据线与上位机进行数据交换,另有一条线接220v交流电源。
便携式直线一级倒立摆的工作原理如图2所示:图2 便携式一级倒立摆工作原理图数据采集卡采集到旋转编码器数据和电机尾部编码器数据,旋转编码器与摆杆同轴,电机与小车通过皮带连接,所以通过计算就可以得到摆杆的角位移以及小车位移,角位移差分得角速度,位移差分可得速度,然后根据自动控制中的各种理论转化的算法计算出控制量。
控制量由计算机通过USB数据线下发给伺服驱动器,由驱动器实现对电机控制,电机尾部编码器连接到驱动器形成闭环,从而可以实现摆杆直立不倒以及自摆起。
2便携式倒立摆控制原理方框图便携式倒立摆是具有反馈功能的闭环系统,其控制目标是实现在静态和动态下的稳摆。
当输入量为理想摆角,即∅∅=0时,偏差为0,控制器不工作;当输入量不为理想摆角时,偏差存在,控制器做出决策,驱动电机,使小车摆杆系统发生相应位移,输出的摆角通过角位移传感器作用于输出量,达到减小偏差的目的。
根据控制原理绘制出控制方框图如图3所示:图3 便携式一级倒立摆控制原理方框图3建立小车-摆杆数学模型便携式倒立摆系统主要由小车、摆杆等组成,它们之间自由连接。
小车可以在导轨上自由移动,摆杆可以在铅垂的平面内自由地摆动。
在忽略了空气阻力和各种摩擦之后,可将便携式倒立摆系统抽象成小车和匀质杆组成的刚体系统,在惯性坐标内应用经典力学理论建立系统的动力学方程,采用力学分析方法建立小车-摆杆的数学模型。
直线一级倒立摆系统的建模及仿真
计算机控制技术课程设计实验:直线一级倒立摆系统的建模及仿真一、已知条件:图1倒立摆简化模型摆杆角度为输出,小车的位移为输入。
导轨中点为坐标轴的中心即零点,右向为坐标值增加的方向,杆偏移其瞬时平衡位置右侧的角度为正值。
二、任务要求:总体任务通过调节PID参数,设计PID控制器实现摆杆在受到干扰的情况下,依然能恢复平衡。
具体包括以下几部分:1. 理论推导包括倒立摆系统的动力学模型,传递函数,离散传递函数,状态空间或差分方程,稳定性分析,PID控制器设计2. 程序实现实现内容:倒立摆系统模型,控制器以及仿真结果的显示。
开发语言和工具:Matlab m 文件或C/C++ (工具:VC++或其它)3. PID控制参数设定及仿真结果。
分别列出不同杆长的仿真结果(例如:L=0.25 和L=0.5)。
4. 将理论推导、程序实现、仿真结果写成实验报告。
具体求解过程如下:一,倒立摆系统动力学模型的建立图1 摆杆的受力分析图以摆杆为研究对象,对其进行受力分析,如图1所示。
根据质点系的达朗贝尔原理得IC I 0F CP mg CP M →→⨯+⨯-= (1)式中,IC F 为杆的惯性力,表达式为()IC C P CP CP IP ICP ICP t n t nF ma m a a a F F F ==++=++,m 为杆的质量,g 为重力加速度,I M 为杆的惯性力偶。
惯性力及惯性力偶的大小分别为2222IP P ICP I c 2221,,3t d x d d F ma m F m m M J mL dt dt dt θθαα======(2)式中,α为杆的角加速度,P a 为小车的加速度,2L 为杆的长度,θ为杆偏离中心位置的角度,x 偏离轨道中心的位移。
对(2)式代入(1)式,并整理可得22224sin cos 3d d x L g dt dt θθθ-=-(3) 当摆动较小时,可以进行近似处理sin ,cos 1θθθ≈≈。
一阶倒立摆系统建模与仿真研究
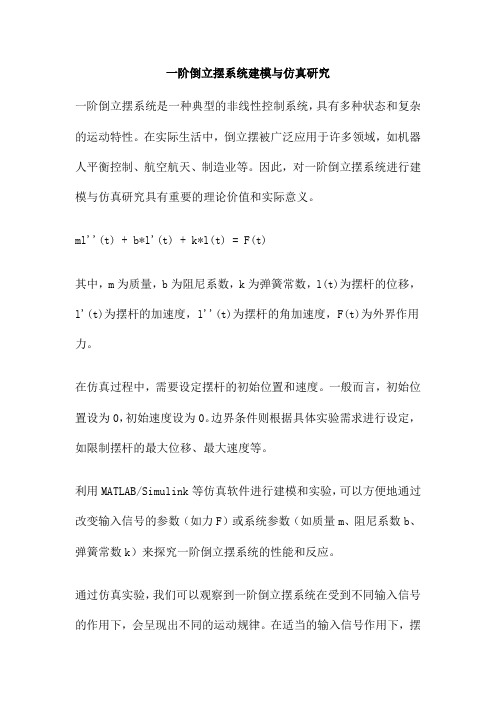
一阶倒立摆系统建模与仿真研究一阶倒立摆系统是一种典型的非线性控制系统,具有多种状态和复杂的运动特性。
在实际生活中,倒立摆被广泛应用于许多领域,如机器人平衡控制、航空航天、制造业等。
因此,对一阶倒立摆系统进行建模与仿真研究具有重要的理论价值和实际意义。
ml''(t) + b*l'(t) + k*l(t) = F(t)其中,m为质量,b为阻尼系数,k为弹簧常数,l(t)为摆杆的位移,l'(t)为摆杆的加速度,l''(t)为摆杆的角加速度,F(t)为外界作用力。
在仿真过程中,需要设定摆杆的初始位置和速度。
一般而言,初始位置设为0,初始速度设为0。
边界条件则根据具体实验需求进行设定,如限制摆杆的最大位移、最大速度等。
利用MATLAB/Simulink等仿真软件进行建模和实验,可以方便地通过改变输入信号的参数(如力F)或系统参数(如质量m、阻尼系数b、弹簧常数k)来探究一阶倒立摆系统的性能和反应。
通过仿真实验,我们可以观察到一阶倒立摆系统在受到不同输入信号的作用下,会呈现出不同的运动规律。
在适当的输入信号作用下,摆杆能够达到稳定状态;而在某些特定的输入信号作用下,摆杆可能会出现共振现象。
在仿真过程中,我们可以发现一阶倒立摆系统具有一定的鲁棒性。
在一定范围内,即使输入信号发生变化或系统参数产生偏差,摆杆也能够保持稳定状态。
然而,当输入信号或系统参数超过一定范围时,摆杆可能会出现共振现象,导致系统失稳。
因此,在实际应用中,需要对输入信号和系统参数进行合理控制,以保证系统的稳定性。
为了避免共振现象的发生,可以通过优化系统参数或采用其他控制策略来实现。
例如,适当增加阻尼系数b能够减小系统的振荡幅度,有利于系统尽快达到稳定状态。
可以采用反馈控制策略,根据摆杆的实时运动状态调整输入信号,以抑制系统的共振响应。
本文对一阶倒立摆系统进行了建模与仿真研究,通过观察不同参数设置下的系统性能和反应,对其运动规律、鲁棒性及稳定性进行了分析。
一阶倒立摆的PID控制仿真
一阶倒立摆的PID控制仿真摘要:本文主要介绍了一阶倒立摆系统的构成和数学模型,设计了PID控制器,在MATLAB环境下进行仿真,并对仿真结果进行分析。
PID控制器具有结构简单、容易实现、控制效果好等特点,是迄今为止最稳定的控制方法。
它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
关键词:一阶倒立摆:PID控制:MATLAB仿真:0.前言:PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
在工业过程控制中,目前采用最多的控制方式依然是PID方式,即使在日本,PID控制的使用率也达到84.5%。
它具有容易实现、控制效果好等特点,同时它原理简单,参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
尽管自1940年以来,许多先进控制方法不断推出,但PID控制器仍被广泛应用于冶金、化工、电力、轻工和机械等工业过程控制中。
1.一阶倒立摆的基本理论:倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
故其研究意义广泛。
1.1一阶倒立摆模型的数学建模质量为m的小球固结于长度为L的细杆(可忽略杆的质量)上,细杆又和质量为M的小车铰接相连。
由经验知:通过控制施加在小车上的力F(包括大小和方向)能够使细杆处于θ=0的稳定倒立状态。
在忽略其他零件的质量以及各种摩擦和阻尼的条件下,推导小车倒立摆系统的数学模型 (如图1)图11.2一阶倒立摆模型的过程分析:如图所示,设细杆摆沿顺时针方向转动为正方向,水平向右方向为水平方向上的正方向。