halcon例程标注_V1.1
halcon新手手册_1.0.1(修)
1.无论读入什么图像,读入图像显示效果明显和原始图像不一致,哪怕是从相机读入的图像,也是明显颜色差异。
什么原因引起?初步诊断是,显示的时候调用的颜色查找表存在异常不是default ,而是其它选项。
此时可以通过查阅相关参数,调用set_system解决,也可以在编辑-》参数选择-》颜色查找表进行更改。
2.裁剪图像;从图像上截取某段图像进行保存。
如何实现该操作?首先应该知道,region不具有单独构成图像的要素,他没有灰度值。
有用过opencv的应该知道ROI(感兴趣区域),设置好它后,对图像的大部分操作就转为图像的一个矩形区域内进行。
类似的,halcon有domain 概念。
首先设置好一个矩形区,然后使用reduce_domain(是一个矩形区域)后,再使用crop_domain 就裁剪出图像。
3.读入bmp,或tiff 图像显示该图不是bmp文件或不能读。
原因是什么?这个常有新手询问,画图,图像管理器都能打开,又或者是相机采集完直接存到硬盘。
Halcon 读取图像在windows下面到最后是调用windows库函数实现读图功能。
咱不清楚到底是怎么调用的。
对于图像格式,在读图函数F1说明很细。
基本bmp 如果文件头不是bw还是bm(百度百科bmp格式查找,编写此处时无网络,后续可能忘记),就读不进来。
其他规格欢迎补充。
解决办法,如果是相机采集,就在内存直接转换(参见halcon到VC.pdf 里面的halcon和bitmap互转);如果是采完的图片,大部分通过画图工具转换为24位bmp 格式,即可解决。
4.读入avi文件报错。
Halcon 通过directshow或另一个格式解析视频,正常来说应该可以读入市面大部分视频,实际测试发现只能读入最标准的avi文件格式。
如果需要临时处理,需要下格式工厂等工具转化为最标准的avi文件格式(论坛叶诺有发帖说明)。
5.Region 或xld 筛选。
Halcon提供了丰富的region 和xld筛选方法。
halcon相机标定和测量示例
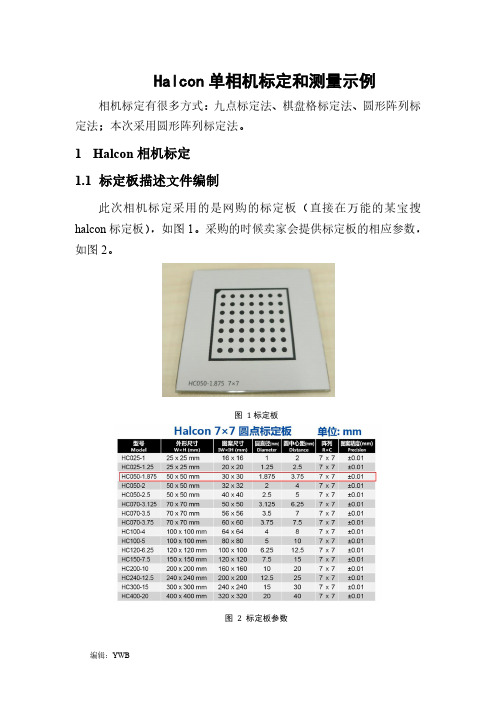
Halcon单相机标定和测量示例相机标定有很多方式:九点标定法、棋盘格标定法、圆形阵列标定法;本次采用圆形阵列标定法。
1Halcon相机标定1.1标定板描述文件编制此次相机标定采用的是网购的标定板(直接在万能的某宝搜halcon标定板),如图1。
采购的时候卖家会提供标定板的相应参数,如图2。
图1标定板图 2 标定板参数用halcon标定助手标定的时候需要用到标定板的描述文件,此文件可以用gen_caltab算子自己编制。
如下为函数说明:gen_caltab( : : XNum, YNum, MarkDist, DiameterRatio, CalPlateDescr, CalPlatePSFile : ) 函数说明:创建一个标定文件和相应的脚本文件。
函数参数:Xnum:输入X方向标记(圆点)的数量,Xnum>1;Ynum:输入Y方向标记(圆点)的数量,Ynum>1;MarkDist:标记圆圆心间距离,单位“m”;(我看过一个资料翻译为标记点大小,差点被坑死)DiameterRatio:两标记点距离和标记直径的比值,默认:0.5。
0<DiameterRatio<1.0;CalPlateDescr:输入要保存的标定文件(此文件保存路径在算子窗口可更改),默认值: 'caltab.descr',参考: 'caltab.descr', 'caltab_100mm.descr', 'caltab_10mm.descr', 'caltab_200mm.descr', 'caltab_30mm.descr';CalPlatePSFile :标定板图像文件的文件路径(此文件保存路径在算子窗口可更改),默认: 'caltab.ps',后缀:ps。
此算子“XNum, YNum, MarkDist, DiameterRatio”这四个参数根据图2所示的标定板参数设置。
halcon单相机标定详细说明

XYZ
方向平移和旋转标定板,采集 18 张图像
图 9 Halcon 三维标定采集图像示例
3、Halcon 的二维标定,只在 XY 平面内平移和旋转标定板,采集 影响提高标定精度
18 张图像,减小 Z 的
实验数据:
方法一 方法二 方法三
图像坐标 X 方向像素物理距离 15.5618um 15.7575um
,
这就使得主点不一定在图像的帧存中心 ,故需要标定 ,,的值。
单个像元的高宽 ????,????,该数据可以在制造商提供的技术文档中查到,但是该数据不是 完全准确的。 单个像元的高宽理论上应该是相等的, 但是由于制造的误差, 两者不可能完全
相等,因此需要根据实际情况对其进行修正。
透镜的畸变失真系数前面讲到理想的透镜成像才满足线性关系
征点提取的算法了。 Halcon 的标定板如图 5 所示,黑色的边框中有阵列分布的原点,在边 框的左上角有个小三角用来确定其旋转的位置。
以 30*30mm 的标定板为例:
黑色原点: 7*7 边框长度: 30*30mm 内边框长度: 28.125mm*28.125mm 黑色原点半径: 0.9375mm 原点中心间距: 3.75mm 裁剪宽度: 30.75*30.75mm
针孔模型是理想透镜的成像模型,但是实际中相机的透镜不可能是理想的模型,透镜形
状的非理想特征造成像点会沿径向发生畸变。一个像点沿径向内缩叫负畸变
,或桶形畸变沿
径向外延叫正畸变 ,或枕形畸变。这种崎变相对于光轴严格对称的
,也是畸变的主要分量 [2] 。
( X u ,Y u)为矫正后的坐标, (X d ,Y d)是受到镜头失真影响而偏移的像平面坐标,径向 径向畸变模型:
标定的方法从原理上主要分为三大类:线性标定、非线性标定和二次标定。 使用的标定板有棋盘格也有原点阵列,如图 4 所示。
halcon deep learning tool 标注工具用法

halcon deep learning tool 标注工具用法Halcon深度学习工具:标注工具的用法Halcon是一个强大的机器视觉软件开发库,其中的深度学习工具为开发者提供了快速高效的图像标注功能。
在本文中,我们将探索Halcon深度学习工具的标注工具用法,详细介绍如何使用该工具来标注图像数据集。
1. 打开Halcon深度学习工具在开始之前,确保已经安装了Halcon软件,并且已经加载了深度学习工具的相关库文件。
启动Halcon后,选择深度学习工具选项,即可进入标注工具。
2. 加载图像数据集在Halcon的标注工具界面中,选择"导入数据集"选项。
这将打开一个对话框,用于选择图像文件的存储路径。
选择所需的图像数据集文件夹,并点击"确定"按钮。
Halcon将自动加载图像数据集。
3. 标注对象在标注工具界面的左侧,有一个"标注"面板,用于选择要标注的对象类型。
点击面板上的对象类型,例如"车辆"或"行人",以选择要标注的对象。
4. 开始标注在标注工具界面中,显示了加载的图像数据集中的第一张图片。
使用鼠标在图像上进行标注。
根据选定的对象类型,在图像上框选目标。
在开始标注时,确保选定的目标完全包含在选择的框中。
按住鼠标左键并拖动以调整框的大小,并释放鼠标按钮。
5. 进行多个标注在完成第一个目标的标注后,可以继续标注其他目标。
继续使用鼠标在图像上框选下一个目标,直到所有目标都标注完毕。
6. 编辑标注结果在标注工具界面的右侧,有一个"标注结果"面板,显示了当前图像的标注结果。
可以通过点击标注结果面板上的标注框来选择一个特定的目标,并通过鼠标拖动标注框来调整其位置或大小。
7. 导出标注数据在完成整个图像数据集的标注后,可以导出标注数据。
选择"导出数据集"选项,Halcon将会生成一个包含每个图像标注结果的文件。
halcon命令中文注解
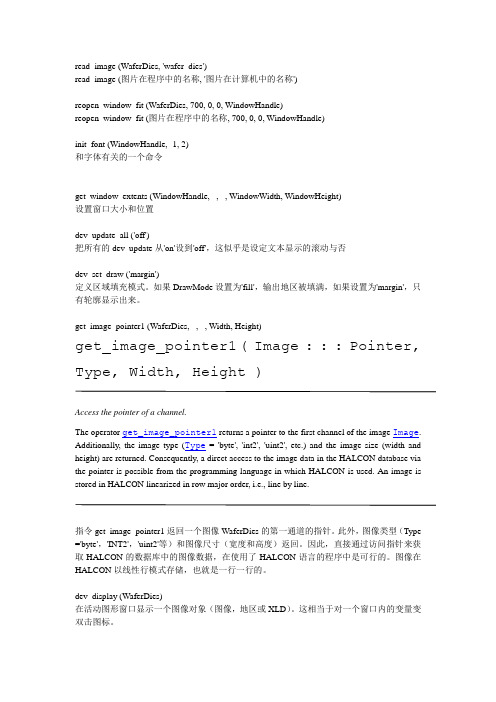
read_image (WaferDies, 'wafer_dies')read_image (图片在程序中的名称, '图片在计算机中的名称')reopen_window_fit (WaferDies, 700, 0, 0, WindowHandle)reopen_window_fit (图片在程序中的名称, 700, 0, 0, WindowHandle)init_font (WindowHandle, -1, 2)和字体有关的一个命令get_window_extents (WindowHandle, _, _, WindowWidth, WindowHeight)设置窗口大小和位置dev_update_all ('off')把所有的dev_update从'on'设到'off',这似乎是设定文本显示的滚动与否dev_set_draw ('margin')定义区域填充模式。
如果DrawMode设置为'fill',输出地区被填满,如果设置为'margin',只有轮廓显示出来。
get_image_pointer1 (WaferDies, _, _, Width, Height)get_image_pointer1( Image : : : Pointer, Type, Width, Height )Access the pointer of a channel.The operator get_image_pointer1 returns a pointer to the first channel of the image Image. Additionally, the image type (Type= 'byte', 'int2', 'uint2', etc.) and the image size (width and height) are returned. Consequently, a direct access to the image data in the HALCON database via the pointer is possible from the programming language in which HALCON is used. An image is stored in HALCON linearized in row major order, i.e., line by line.指令get_image_pointer1返回一个图像WaferDies的第一通道的指针。
halcon实例高级精解

halcon实例高级精解Halcon是一款高级机器视觉软件,广泛应用于工业自动化领域。
它以其强大的图像处理功能和简单易用的编程接口而受到众多工程师和研究人员的青睐。
Halcon的优势之一是其丰富的图像处理算法库。
无论是图像滤波、边缘检测、特征提取还是目标识别,Halcon都提供了多种算法来满足不同应用需求。
例如,对于边缘检测,Halcon提供了基于梯度、基于拉普拉斯算子等多种算法,使用户可以根据实际情况选择最合适的算法来进行边缘检测。
除了图像处理算法,Halcon还提供了丰富的图像分析工具。
用户可以使用Halcon提供的工具来对图像进行分割、测量、统计等操作,从而获取图像中感兴趣的信息。
例如,用户可以使用Halcon的区域分割工具来将图像中的目标分割出来,然后使用测量工具来获取目标的尺寸、位置等信息。
Halcon还支持多种图像输入输出格式,包括常见的图像文件格式和工业相机的图像采集接口。
这使得用户可以方便地将Halcon与其他软件或硬件设备进行集成,实现更复杂的图像处理任务。
尽管Halcon提供了丰富的功能和工具,但它的学习曲线并不陡峭。
Halcon提供了详细的文档和示例代码,用户可以通过学习文档和参考示例代码来快速掌握Halcon的使用方法。
另外,Halcon还提供了友好的图形用户界面,用户可以通过图形界面来配置算法参数,无需编写复杂的代码。
总的来说,Halcon是一款功能强大、易于使用的机器视觉软件。
无论是工程师还是研究人员,在进行图像处理和分析任务时,都可以选择Halcon作为他们的首选工具。
它的高级功能和人性化的设计使得用户可以快速高效地完成各种图像处理任务,为工业自动化领域的发展做出贡献。
Halcon

HalconHalcon⽬录1、相机接⼊且拍摄 (2)1.1 步骤 (2)1.2 后续处理函数 (5)2、相机标定 (7)2.1标定步骤 (7)3、⼿眼系统标定 (11)3.1 标定步骤 (11)4、图像坐标和机器臂坐标转换 (13)4.1 转换步骤 (14)5、模版匹配(基于形状) (19)5.1 步骤 (19)6、常见函数 (25)6.1 图像分割 (25)6.2 轮廓提取、处理 (31)1、相机接⼊且拍摄1.1 步骤(1)连接相机open_framegrabbe(Name, HorizontalResolution, VerticalResolution, ImageWidth, ImageHeight, StartRow, StartColumn, Field, BitsPerChannel, ColorSpace, Generic, ExternalTrigger, CameraType, Device, Port, LineIn, AcqHandle) 在算⼦窗⼝内输⼊函数名,填⼊参数后点击“确定”按钮即可将函数加⼊程序中。
注:Name: 图像采集设备的名称可通过以下步骤确定:1、在Halcon菜单栏⾥点击“窗⼝”,选择“打开算⼦窗⼝”。
(若算⼦窗⼝已打开则直接进⼊第⼆步)2、在“输⼊算⼦或函数”栏内输⼊“open_framegrabbe”回车后出现下图3、在“参数”栏中的Name后点击即可⾃动检测连接的设备(笔记本电脑摄像头检测后为’DirectShow’)此参数若随意填写,可能导致程序报错HorizontaResolution、VerticalResolution:预期的图像采集接⼝的⽔平分辨率和垂直分辨率ImageWidth、ImageHeight:预期图像的宽度和⾼度部分StartRow、StartColumn:显⽰预期图像的开始坐标Field:预期图像是⼀半的图像或者是完整图像BitsPerChannel:每像素⽐特数和图像通道ColorSpace:获取图像的输出形式(gray、raw、rgb、yuv、default)说明:此参数设置不同的值可以得到不同的图像效果,如设置“gray”则后续拍摄的图像为灰度图;选择“rbg”则会显⽰彩⾊图像Generic: 通⽤参数与设备细节部分的具体意义ExternalTrigger:是否有外部触发器CameraType:使⽤相机的类型Device: 连接到的设备说明:此参数⽤于区分不同的摄像头,因此在连接多摄像头时需要设置不同的值。
halcon相机标定方法

halcon相机标定方法【实用版3篇】《halcon相机标定方法》篇1Halcon相机标定方法可以采用以下步骤:1. 确定畸变系数。
畸变系数表示相机成像过程中的畸变程度,其值介于0和0.00001之间。
在标定过程中,需要确定畸变系数。
2. 确定标定板。
标定板是用于相机标定的已知几何信息的板状物体。
标定板通常由一系列等边直角三角形组成,每条边上都有四个角,共12个点。
这些角可以用于计算相机的内部参数和畸变系数。
3. 获取标定板图像。
获取标定板图像并将其输入到Halcon中。
4. 提取角点信息。
使用Halcon中的“find_features”函数来提取标定板图像中的角点信息。
该函数将自动检测图像中的角点,并返回其坐标和类型。
5. 计算相机内部参数。
使用提取的角点信息,结合Halcon中的“find_feature_points”函数和“find_feature_matches”函数,可以计算相机的内部参数和畸变系数。
6. 验证标定结果。
为了验证标定结果,可以使用Halcon中的“check_calib”函数来检查相机内部参数和畸变系数是否正确。
以上是Halcon相机标定的基本步骤。
《halcon相机标定方法》篇2Halcon相机标定方法有:1. 传统六点标定法。
这种方法是通过一个平面上的六个点的位置来确定整个平面的几何参数,进而求得相机的内参数。
2. 棋盘格标定法。
棋盘格标定法是通过棋盘格上两组对应点的几何约束,解算出相机的畸变系数。
3. 标定板标定法。
《halcon相机标定方法》篇3Halcon相机标定方法有以下几个步骤:1. 建立棋盘格点在Halcon中,建立棋盘格点需要指定格点在图像中的实际坐标,这样可以正确计算出畸变系数。
如果只指定棋盘格在图像中的尺寸和数量,那么在畸变计算时会返回默认的(通常是不可靠的)畸变系数。
建立棋盘格点的方法如下:`2x2 to picture :诤友棋盘格(squareSize:[20,20], gridNum:25)`2. 确定相机位置和方向这里有两种方法:方法一:建立一个动态的目标,不断改变目标与相机的距离和角度,然后计算目标的成像位置,从而得到相机的位置和方向。
halcon基础(bbs)

基于FPGA的二值图像连通域快速标记连通域标记算法是图像处理、计算机视觉和模式识别等领域的基本算法,它可以对图像中不同目标标上不同的标记,进而提取、分离目标,确定目标的特征和参数,从而对目标进行识别和跟踪。
连通域标记算法广泛应用于军事目标跟踪、工业产品监控、交通路口监控等场合图像处理系统中。
目前的连通标记算法分为两大类,一是基于像素的连通成分标记,另一种就是基于行程的连通成分标记算法。
基于行程的连通域标记算法难以采用硬件实现,一般都采用软件编程的方式在PC机上实现,处理速度较慢,占用资源多。
基于像素的连通域标记采用软件实现速度较慢,适于硬件实现。
针对FPGA的特点,提出了一种适于FPGA实现的连通域快速标记的方法。
在33 MHz工作时钟下,单片FPGA能够完成1 000 f/s的128×128的二值图像标记,处理速度能够满足实时系统要求。
1 标记算法1.1 临时标记连通域标记对二值图像采取从左到右,从上到下的方式进行两次扫描。
第一次扫描过程中,对像素为一的点标记一个临时标记,为零的点不标记,标记完后得到一个等价表,合并等价表形成一个以较大标记值为索引的链表;第二次扫描时,对临时标记的逐个像素进行替代,最后得到以目标出现顺序的自然数顺顺序的标记。
二值图像整个标记处理过程如图1所示。
采用2×2的窗口进行逐行扫描的方式对二值图像的逐个像素进行临时标记,扫描窗口如图2所示。
图2中:P为当前像素;U为当前像素上一行像素对应的标记;L为其左边像素标记;P的临时标记记为PL;当前标记最大值记为LN。
临时标记方法如下:(1)如果当前像素P不为零:如果L和U只有一个不为零,则复制此标记给PL;如果L和U均不为零且相同则复制此标记给PL;如果L和U均为零,则分配一个新的标记LN+1给PL;如果L和U 均不为零但不相同,则复制其中较小一个给PL,并将L和U,存入等价表中。
如图3所示。
(2)如果当前像素P为零则PL为零。
halcon九点标定例程

halcon九点标定例程【原创版】目录1.介绍 halcon 九点标定例程2.详述 halcon 九点标定的具体步骤3.分析 halcon 九点标定的优点与不足4.总结 halcon 九点标定例程的重要性正文一、介绍 halcon 九点标定例程Halcon 九点标定例程是工业自动化领域中常用的一种标定方法,主要用于精确测量物体的尺寸和位置。
该方法通过在一个平面上选取九个特征点,然后利用特定的算法对这些特征点进行处理,从而实现对物体的精确测量。
这种方法具有操作简便、精度高、抗干扰能力强等优点,因此在工业生产中得到了广泛的应用。
二、详述 halcon 九点标定的具体步骤1.准备工作:首先,需要确保相机、光源等硬件设备已经正确安装并正常运行。
此外,还需要选择合适的标定板(通常为正方形,上面印有九个特征点),并将其放置在相机可拍摄的范围内。
2.拍摄照片:在确保标定板放置正确的情况下,启动相机拍摄包含九个特征点的照片。
需要注意的是,拍摄时需要保证光线充足、照片清晰,以确保后续处理效果。
3.特征点提取:通过图像处理软件(如 Halcon)对拍摄到的照片进行处理,提取出九个特征点。
这一步通常包括边缘检测、轮廓提取、特征点筛选等操作。
4.建立坐标系:在照片上选取一个点作为原点,然后利用相机的内参数(如焦距、像素尺寸等)和已知的物距(即特征点到相机的距离),计算出其他特征点在三维空间中的坐标。
这样,就建立了一个以原点为基准的二维坐标系。
5.计算相机参数:通过九点标定算法,计算出相机的外参数(如旋转矩阵、平移矩阵等),从而实现对物体在三维空间中的精确定位。
三、分析 halcon 九点标定的优点与不足1.优点:(1)操作简便:九点标定方法所需设备和操作步骤较为简单,易于上手。
(2)精度高:该方法利用多个特征点进行标定,提高了测量的精度和可靠性。
(3)抗干扰能力强:九点标定方法对光照、摄像头晃动等干扰因素具有较强的抗干扰能力。
halcon摄像机标定

基于HALCON的双目立体视觉系统实现摘要双目立体视觉的研究一直是机器视觉中的热点和难点。
使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。
因此双目立体视觉系统可以应用在多个领域。
本文将主要介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率提供了参考。
关键词双目视觉三维重建立体匹配摄像机标定视差双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。
双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体三维几何信息,重建物体三维轮廓及位置。
双目立体视觉系统在机器视觉领域有着广泛的应用前景。
HALCON是在世界范围内广泛使用的机器视觉软件。
它拥有满足您各类机器视觉应用需求的完善的开发库。
HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。
HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。
另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。
一.双目立体视觉相关基本理论介绍1.1 双目立体视觉原理双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。
摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。
事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。
halcon例程标注 V

光学字符检测例程名adaption_ocv.hdev 自适应ocvprint_check.hdev打印检测print_check_single_chars.hdev逐个字符打印检测print_quality.hdev打印质量write_ocv.hdevocv的写入光学字符识别例程名bottle.hdev瓶子数字读取bottlet.hdev瓶子数字训练classify_character_ocr.hdevOCR字体分类compare_ocr_svm_mlp.hdev在OCR中比较SVM和MLPdotprt.hdevDotPrint字体的OCRdots_image.hdev在图像中使用dots_image方法分割出dotprint字体engraved.hdev金属表面OCR读取engracedt.hdev金属表面OCR训练find_text_bottle_label.hdev 寻找瓶子上的标签文本进行OCR find_text_dongle.hdev 在加密狗中寻找文本进行OCRfont.hdev字体互动fontt.hdevfont程序的训练文件gen_training_file.hdev创建训练文件generate_system_font.hdev生成系统字体label_word_process_mlp.hdev 使用mlp处理标签文字letter.hdev互动的方式读取字letters_mlp.hdevMLP训练字letters_svm.hdevSVM训练字lettert.hdev训练字lexicon.hdev字典ocr_cd_print_polar_trans.hdev 在非线性模式下读取字符ocr_dongle.hdev加密狗OCRocr_gradient_ferture.hdev OCR的梯度特征ocr_lot_number.hdev批号的OCRocr_wafer_semi_font.hdev 晶体上的SEMI字体的OCRocr_yogurt.hdev酸奶OCRocrcolor.hdev彩色数字OCRcorcolort.hdev彩色OCR的训练rotchar.hdev倾斜度估算select_character.hdev选择特征simple_reading.hdev简单读取simple_training.hdev简单训练statistics_points_xld.hdevpoint_xld的统计应用text_line_orientation.hdev文本行的方向text_line_slant.hdev倾斜字符调整train_characters_ocr.hdevOCR字体训练模板匹配(基于点)模板匹配(基于灰度)模板匹配(基于相关性)例程名模板匹配(基于形状)例程名align_measurements.hdev匹配尺寸测量check_soft_cheese.hdev检测软干酪create_average_shape_model.hdev创建均值化形状模板create_model_green_dot.hdev创建Green Dot回收标志模板create_roi_via_vision.hdev创建图像ROIcreate_shape_model_xld.hdev创建xld形状模板find_aniso_shape_model.hdev寻找各向异性形状模板find_cocoa_packages_max_deformation.hdev寻找可可包装(最大变形)find_mirror_dies.hdev寻找镜子find_peanut_chocolate_candies_local_deformable.hdev 寻找巧克力糖商标(局部变形)find_scaled_shape_model.hdev寻找尺度变化的形状模板find_shape_model_max_deformation.hdev寻找形状模板(最大变形)inspect_shampoo_label.hdev检测香波商标位置matching_coins.hdev硬币匹配matching_defocused_pcb.hdev匹配失焦pcbmatching_deformed_bulb.hdev匹配畸变的灯泡matching_green_dot.hdev回收标志匹配matching_image_border.hdev图像越边缘匹配matching_multi_channel_clamp.hdev多通道匹配夹钳matching_multi_channel_yogurt.hdev 多通道匹配优格measure_fill_level.hdev测量灌满水平multiple_models.hdev多模板multiple_objects.hdev多目标multiple_scales.hdev多尺度pm_measure_board.hdev电路板测量pm_multiple_dxf_models.hdevDXF多模板文件匹配pm_multiple_models.hdev多模板文件匹配pm_world_plane.hdev世界平面print_check.hdev印品检测print_check_single_chars.hdev单字符印品检测process_shape_model.hdev处理形状模板receive_serialized_item.hdev接收序列化条目set_shape_model_min_contrast.hdev 设置形状模板的最小对比度参数set_shape_model_timeout.hdev设置形状模板的超时参数synthetic_circle.hdev人工圆模板variation_model_illumination.hdev 差异模板照明variation_model_single.hdev单一参考图像差异模板模板匹配(基于组件)利用组件匹配确定游标卡尺读数cbm_dip_switch.hdev升降开关识别cbm_label_simple.hdev商标识别cbm_modules_simple.hdev模块识别cbm_param_visual.hdev组件匹配参数评估cbm_pipe_wrench.hdev钳子识别cbm_pipe_wrench_simple.hdev钳子识别cbm_sbm.hdev组件匹配与形状匹配对比grid_rectification_arbitrary_distortion.hdev 任意畸变网格矫正模板匹配(局部可变形)例程名find_cocoa_packages_local_deformable.hdev寻找局部变形的可可包装标识inspect_gasket_local_deformable.hdev检测局部变形的垫圈拼接例程名adjust mosaic images.hdev拼接图像调整blended mosaic.hdev混杂拼接bundle adjusted mosaicking光束法调整拼接gen projective mosaic.hdev创建投影映射关系mosaicking.hdevmosaicking pyramid金字塔拼接proj match points distortion ransac.hdev 基于匹配点的随机抽样一致扭曲矫正proj match points distortion ransac guided 带引导的匹配点随机抽样一致扭曲矫正stationary camera self calibration.hdev固定相机自标定图像分割例程名auto_threshold.hdev自动阈值分割(多阈值)background_seg.hdev分割区域的背景bin_threshold.hdev自动阈值分割(单阈值)bin_threshold2.hdev自动阈值分割(两种不同方法的比较)char_threshold.hdev适用于字符的阈值分割check_difference.hdev逐像素比较两幅图像的不同check_fish_stick_dimension.hdev测量生鱼片的大小classify_image_class_gmm.hdev利用GMM分类器对四种颜色进行分类classify_image_class_knn.hdev利用GMM分类器对四种颜色进行分类classify_image_class_lut.hdev利用GMM分类器对四种颜色进行分类classify_image_class_mlp.hdev利用GMM分类器对四种颜色进行分类classify_image_class_svm.hdev利用GMM分类器对四种颜色进行分类critical_points_sub_pix.hdev在亚像素精度下提取图中的临界点dots_image.hdev提取出“点打印”输出设备上的字符dual_threshold.hdev对符号图像进行阈值分割dyn_threshold.hdev动态阈值分割entropy_image.hdev计算图像的灰度值的熵expand_gray.hdev分开重叠区域以及填补区域间的空白expand_gray_ref.hdev分开重叠区域以及填补区域间的空白expand_line.hdev从给定的一条线开始生成一个区域expand_region.hdev逐步扩大区域fast_threshold.hdev快速阈值分割fast_threshold_vs_threshold.hdev快速阈值分割和阈值分割的区别find_local_deformable_model.hdev寻找图中变形了的地方find_shape_model_max_deformation.hdev基于变量max_deformation的形状匹配find_text_bottle_label.hdev识别瓶子标签上的文字find_text_dongle.hdev识别软件狗上的字符first_example_acquisition_saperalt.hdev 图像识别中的一些基本操作gen_grid_region.hdev生成网格状区域提取目标generate_system_font.hdev生成系统字体来训练分类器gray_opening.hdev灰度图开运算(区别于二值化图像的开运算)histo_to_thresh.hdev利用直方图进行阈值分割hysteresis_threshold.hdev非极大值抑制阈值分割interjacent.hdev用区域分割线来分割图像letter_knn.hdev使用KNN分类器来对字符进行分类letter_mlp.hdev使用MLP分类器来对字符进行分类一维测量吴敬鑫未完成,下一版本完成版本更替说明2014/10/21版本号:1.3模板匹配(基于相关性)模板匹配(基于组件)模板匹配(局部可变形)2014/09/16版本号:1.2.5(部分预定目标未完成)新增 模板匹配(基于描述符) 模板匹配(基于点)图像分割2014/8/31版本号:V1.1新增拼接,模板匹配(基于形状),模板匹配(可变形),光学字符检测 四条例程分支;新增图片栏,例程名红色字体样式,算子及本地过程函数蓝色字体样式。
Halcon相机标定简介

Halcon相机标定简介相机标定简介⾸先镜头有畸变,也就是说照出的图像与实际不符产⽣了形变。
即使⼯业镜头也是有千分之⼏的畸变率的。
上个图告诉⼤家畸变这个图⾥,第⼀个图就是我们相机下的真实的形状,后边两个就是照出来有畸变的图⽚。
其次镜头与相机⽆论你的机械结构精度多⾼,也不容易或者说没办法将相机安装的特别正,那相机安装不正也是会导致误差的。
⼤家想知道具体数学模型的话可以搜⼀下相机标定的理论⽅⾯的知识,我侧重怎么做。
标定就是把上述两个东西转化成正常的。
⽆论是在图像测量或者机器视觉应⽤中,相机参数的标定都是⾮常关键的环节,其标定结果的精度及算法的稳定性直接影响相机⼯作产⽣结果的准确性。
深度说明1、相机标定参数介绍内参:确定摄像机从三维空间到⼆维空间的投影关系。
针孔相机(FA镜头相机)模型为6个参数(f,kSx,Sy,Cx,Cy);远⼼镜头相机模型为5个参数(f,Sx,Sy,Cx,Cy);线阵相机为11个参数(f,k,Sx,Sy,Cx,Cy,Width,Highth,Vx,Vy,Vz)。
其中:f为焦距;k表⽰径向畸变量级。
如果k为负值,畸变为桶形畸变,如果为正值,那么畸变为枕形畸变。
Sx,Sy是缩放⽐例因⼦。
对于相机(FA镜头)表⽰图像传感器⽔平和垂直⽅向上相邻像素之间的距离,初始值与真实值越接近计算速度越快。
对于远⼼摄像机模型,表⽰像素在世界坐标系中的尺⼨。
Cx,Cy是图像的主点,对于相机,这个点是投影中⼼在成像平⾯上的垂直投影,同时也是径向畸变的中⼼。
对于远⼼摄像机模型,只表⽰畸变的中⼼。
Vx,Vy,Vz:线阵相机必须与被拍摄物体之间有相对移动才能拍摄到⼀幅有⽤的图像。
这是运动向量。
Sx,Sy对于线阵相机是相邻像元的⽔平和垂直距离。
2、标定板详细介绍问题1:halcon是否只能使⽤halcon专⽤的标定板?halcon提供了简便、精准的标定算⼦与标定助⼿,这在实际使⽤中极⼤地⽅便了使⽤者在halcon中有两种标定⽅式:halcon⾃带例程中出现的,⽤halcon定义的标定板,如下图:⽤户⾃定义标定板,⽤户可以制作任何形状、形式的标定板,如下图:所以,halcon并⾮只能使⽤专⽤标定板,也可以使⽤⾃定义标定板就可以进⾏标定。
halcon 单目相机 标定例程
HALCON是一个强大的机器视觉软件,它支持各种相机的标定。
单目相机标定的主要目的是完成像素坐标到世界坐标之间的转换。
此外,标定还能帮助我们进行畸变矫正和一维二维图像测量,因为相机成像后往往会产生畸变和缩放。
在HALCON中,你可以使用标定助手来完成单相机的标定。
具体的步骤如下:
1. 打开HALCON并新建一个程序。
2. 在程序编辑中输入算子gen_caltab,然后右击打开算子窗口,输入相关参数,点击确定。
这一步会生成两个文件,一个是后缀为.descr的标定板描述文件,另一个是标定板的图像文件。
3. 打开助手里的标定助手。
4. 进入到标定助手界面,更改描述文件、摄像机模型以及相机相关参数。
5. 点击标定选项卡,然后点击图像采集助手,会立刻弹出图像采集助手对话框(如果之前打开过图像采集助手,在这里就不会弹出),接下里进行相机的连接。
点击自动检测接口,可以选择halcon自带的接口或者是相机的接口。
通过以上步骤,你便可以使用HALCON对单目相机进行标定了。
请注意,这只是一个基本流程,实际操作可能需要根据你的具体需求和设备进行调整。
Halcon标定步骤

Halcon标定步骤Halcon标定步骤1.设置相机内部参数的初始值StartCamPar := [0.016,0,0.0000074,0.0000074,326,247,652,494]set_calib_data_cam_param (CalibDataID, 0, 'area_scan_division', StartCamPar)1.1 相机型号(1)⾯阵(2)线阵1.2 参数设置(这⾥只讲⾯阵相机)(1)Division畸变模型CameraParam:[Focus, Kappa, Sx, Sy, Cx, Cy, ImageWidth, ImageHeight](2)Polynomial 畸变模型CameraParam:[Focus, K1, K2, K3, P1, P2, Sx, Sy, Cx, Cy, ImageWidth, ImageHeight]注:当镜头为远⼼镜头时,Focus=0;1.3 畸变类型的选择Division畸变模型只适⽤于进度要求不是很⾼,标定图⽚数量较少的情况;Polynomial 畸变模型对镜像畸变和切向畸变都校正,精度较⾼,花费时间长。
1.4 标定时个参数值的确定技巧Focus f:镜头的标称焦距, e.g., 0.016 m.;对于远⼼镜头为0.κ: ⼀般去0.0Or:K1, K2, K3,P1, P2:可全部初始化为0Sx: 由CCDCMOS确定建议取值如下:Full image (640*480) Subsampling (320*240)1/3"-Chip 0.0000055 m 0.0000110 m1/2"-Chip 0.0000086 m 0.0000172 m2/3"-Chip 0.0000110 m 0.0000220 mSy: 由CCDCMOS确定建议取值如下:for example:Full image (640*480) Subsampling (320*240)1/3"-Chip 0.0000055 m 0.0000110 m1/2"-Chip 0.0000086 m 0.0000172 m2/3"-Chip 0.0000110 m 0.0000220 mCx and Cy: 光⼼坐标初始值,建议取值如下:for example:Full image (640*480) Subsampling (320*240)Cx 320.0 160.0Cy 240.0 120.0ImageWidth,ImageHeight:有实际图⽚⼤⼩来初始化该值for example:Full image (640*480) Subsampling (320*240)ImageWidth 640 320ImageHeight 480 2402.标定板初始化CaltabName := 'caltab_30mm.descr'//标定板描述⽂件set_calib_data_calib_object (CalibDataID, 0, CaltabName)3.创建数据模型create_calib_data ('calibration_object', 1, 1, CalibDataID)4.获取标定图⽚相机拍摄不同位姿下图⽚8-15张,拍摄图⽚时标定板尽量覆盖整个视场(标定板要根据⼯作距离、视场⼤⼩定制);拍摄图⽚上的圆直径不得⼩于10个像素5.加载所有图像,寻找标定板区域,确定圆⼼,将结果加载到组元中for I := 1 to NumImages by 1... acquire image ...find_caltab (Image, Caltab, CaltabName, SizeGauss, MarkThresh, MinDiamMarks)find_marks_and_pose (Image, Caltab, CaltabName, StartCamPar, StartThresh,DeltaThresh, MinThresh, Alpha, MinContLength, MaxDiamMarks, RCoord, CCoord, StartPose)set_calib_data_observ_points (CalibDataID, 0, 0, I, RCoord, CCoord, 'all', StartPose)endfor下⾯将Halcon中提取⽬标点的⼤致原理说⼀下:⾸先find_caltab 算⼦对图像⾼斯滤波(核⼤⼩为SizeGauss),接着阈值分割(与之⼤⼩为MarkThresh)将标定板的区域找出来,find_marks_and_pose 算⼦对区域中的圆进⾏分割,找到圆的个数,周长,坐标位置等应该和标定板描述⽂件中的⼀致,否则会⾃动调整StartThresh,使得StartThresh按照DeltaThresh步长减⼩到MinThresh,知道找到准确的圆⼼。
Halcon例子说明

Halcon例子说明Halcon实例说明1、inspect_bottle_mouth.hdev:易拉管缺陷检测。
用到了极坐标变换2、circular_barcode.hdev:一维条码检测,用到坐标变换。
弧形拉直。
用到了极坐标变换3、surface_scratch.hdev:表面划伤检测。
4、ball.hdev:PCB板焊锡点检测。
用到常用算子及开运算opening。
5、best_match_rot_mg_clip1.hdev:带方向的基本模版匹配 6、bin_threshold.hdev:计算图片中的灰度直方图7、bin_threshold2.hdev:程序说明怎样bin_threshold与threshold之间的相等转换计算。
8、bottle.hdev:OCR字符的检测 9、bottlet.hdev:OCR字符的检测10、check_blister.hdev:药品颗粒检测。
用一些常用算子及坐标变换,图片旋转。
11、check_bottle_crate.hdev:圆孔检测。
用到opening_circle、select_shape等常用处理算子。
12、check_hazelnut_wafers.hdev:检测物体表面缺陷。
很好的用到了开运算算子opening_circle和闭运算算子closing_circle13、check_smd_tilt.hdev:检测SMD用到算子sobel_amp边缘检测,measure_projection 14、check_soft_cheese.hdev:用到算子有彩色图转换为灰度图(rgb1_to_gray),模版匹配 15、create_shape_model、find_shape_models,图像坐标变转vector_angle_to_rigid 、 affine_trans_contour_xld等算子。
16、circles.hdev:圆拟合算子(fit_circle_contour_xld),边缘检测(edges_sub_pix)。
Halcon使用指南
Halcon使用指南
预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制
Halcon使用指南
一、hDevelop图像组件
1.1.hDevelop预览
新建一个程序,可以看到界面中有菜单栏、工具栏、状态栏、图像窗口(显示结果)、变量查看窗口(控制结果)、程序窗口(编辑程序)、算子窗口(编辑算子)。
1.2.菜单栏
文件:打开和存储程序、载入图像、HDevelop一般选项;
编辑:编辑程序;
执行:程序执行控制;
可视化:图像窗口中显示参数控制、图像检测工具、存储窗口内容到文件中;过程:处理程序过程及选择;
算子:所有算子分类;
建议:前任和后继算子参考建议;
助手:图像获取/匹配/标定助手
窗口:打开窗口及布局;
帮助:在线帮助、halcon参考手册;
1.3.工具栏
1.4.算子窗口
算子选择
算子详细讲解:打开halcon手册,在搜索栏或算子栏输入算子,右侧则会显示算子的具体解释;
1.5.编辑窗口
1.6.图像窗口
处理图像窗口的可视化菜单1.7.变量窗口。
HALCON各种定位方法

Example
find_scaled_shape_model.dev first_example_shape_matching.d ev multiple_models.dev multiple_scales.dev print_check.dev
Create No-Pre 155ms 72ms
100ms 96ms 113ms
◆ set_system('pregenerate_shape_models','true'/'false')
如果没有设置,默认为
◆ set_system('pregenerate_shape_models','false')
模板参数-Optimization
相同环境下,Optimization第二个参数取值不同时的运行时间对比
模板参数-Optimization
除了减少像素,该参数也可以控制模板的创建方式,来 选择内存优先还是速度优先
第二个值可选下面两个
◆ 'pregeneration' 模板预先创建,牺牲内存来换取查找速度
◆ 'no_pregeneration' 在查找时才创建必须数据,占用内存少
如果系统中所有选择相同,可以
Least Squares Very High
120%
0.025°
131%
0.014°
142%
0.013°
查找参数-Greediness
该参数是用来做定位加速的 值越小,速度越慢 值越高,找丢目标的可能越大 建议取值:0.7 — 0.9
通过Dxf文件创建模板
read_contour_xld_dxf
halcon example 说明

1. 深度和广度评估在评估halcon example这一主题时,首先需要对Halcon的基本概念和功能有一个全面的了解。
Halcon是一款强大的机器视觉软件,用于工业自动化领域的图像处理和分析。
在撰写文章时,需要深入挖掘其在工业自动化领域的应用,以及其在图像处理和分析方面的特点和优势。
2. 从简到繁,由浅入深文章的撰写应该从Halcon的基本概念入手,例如其功能特点、适用范围等,并逐步深入到其在工业自动化中的具体应用和案例分析。
通过逐步展开的方式,读者可以更好地理解Halcon example的意义和价值,同时也能够更深入地理解其在实际应用中的运用。
3. 多次提及关键主题词在文章中,需要多次提及“Halcon example”,以便突出重点,提醒读者本文的核心主题是围绕着Halcon example展开的。
4. 包含总结和回顾性内容在文章的结尾部分,应该对Halcon example的重要性和应用进行总结和回顾,以便读者能够全面、深刻和灵活地理解这一主题的内容。
5. 共享个人观点和理解在撰写文章的过程中,还应该融入自己对Halcon example的个人观点和理解,以便读者更好地了解作者对这一主题的态度和看法。
文章应该以非Markdown格式的普通文本撰写,遵循知识文章格式,使用序号标注,并在内容中多次提及“Halcon example”这一关键主题词。
文章内容要求超过3000字,且不得出现字数统计。
Halcon example是一个十分重要的主题,它涉及到Halcon机器视觉软件在工业自动化领域的应用和特点。
在撰写这篇文章时,我们需要从深度和广度两个方面进行评估,也就是说要全面了解Halcon的基本概念和功能,以及深入挖掘其在工业自动化领域的具体应用和优势。
让我们来了解一下Halcon的基本概念和功能特点。
Halcon作为一款强大的机器视觉软件,具有图像处理和分析的功能。
它可以通过图像采集设备获取图像数据,并对这些数据进行高效的处理和分析,从而实现工业自动化生产中的检测、识别和测量任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例程描述
首要关键词 次要关键词
分析了光照变化对特征质量报道的影响
ocv 自适应
光照变化 字符 检测
使用HALCON的变化模式运营执行典型的 印刷质量检 变化模式 字符
印刷质量检查。Leabharlann 查检测使用HALCON的变化模式运营执行典型的 印刷质量检查。其中每个字符被单独检 查。
逐个字符检 测
印刷质量检测 形状匹配 字符
mosaicking.hdev 拼接
mosaicking pyramid 金字塔拼接
proj match points distortion ransac.hdev 基于匹配点的随机抽样一致扭曲矫正
proj match points distortion ransac guided 带引导的匹配点随机抽样一致扭曲矫正
基于增加变形允许公差的卤素灯泡定位 变形公差 二维位置定位
寻找缩放和旋转的形状模板
缩放旋转
定位多个模具,即使他们越过图像边界 越边界匹配
用颜色形状匹配从一堆中定位出上盘制 彩色形状匹 动螺旋,局部对比度过低时,多通道的 配 颜色形状匹配更鲁棒
二维位置定位 二维物体识别 二维位置定位 二维测量比较 二维位置定位 二维测量比较
次要关键词 二维物体识别
三维物体定位
二维位置定位
交通监控驾驶 辅助系统 二维位置定位
三维物体定位
三维物体定位
机器人视觉 跟踪
例程描述
首要关键词 次要关键词
利用形状匹配测量工具的ROI,从而检 查刀片完整与否,可用仿射变换或用 translate_measure算子将测量对象参 考点转换成想要的点坐标
variation_model_single.hdev 单一参考图像差异模板
拼接
例程名 adjust mosaic images.hdev 拼接图像调整 blended mosaic.hdev 混杂拼接 bundle adjusted mosaicking 光束法调整拼接
gen projective mosaic.hdev 创建投影映射关系
在电路板上定位IC并测量接口距离
定位测距 二维位置定位
二维测量比较
利用DXF文件中的CAD轮廓在单一流程中 单流程多目 二维位置定位
寻找多个不同的模板,本例在360°范 标匹配
二维物体识别
围内训练模板和匹配费时,各模板角度
各不相同
在单一流程中利用形状匹配寻找多个模 单流程多目 二维位置定位
板实例,四个模板用四个不同的角度范 标匹配
pm_multiple_models.hdev 多模板文件匹配
pm_world_plane.hdev 世界平面
print_check.hdev 印品检测
print_check_single_chars.hdev 单字符印品检测 process_shape_model.hdev 处理形状模板 receive_serialized_item.hdev 接收序列化条目 set_shape_model_min_contrast.hdev 设置形状模板的最小对比度参数 set_shape_model_timeout.hdev 设置形状模板的超时参数 synthetic_circle.hdev 人工圆模板 variation_model_illumination.hdev 差异模板照明
形状匹配测 二维位置定位 量 ROI
检测软干酪包装上标明的干酪口味是哪 形状匹配 二维物体识别
一种
由一些列采样图像的均值图像创建一个 均值图像 二维位置定位
更具鲁棒性的形状模板
人造模板 二维物体识别
利用模板训练创建更加鲁棒的尺度不变 尺度不变 创建模板
的形状模板
模板训练
通过图像处理创建一个模板 ROI,阈值 图像处理 二维位置定位
利用局部变形匹配寻找畸变目标物
利用透视畸变匹配定位车门的位置和方 向,匹配前要用标定板标定初始目标位 置,找出三维位姿 利用透视畸变匹配定位发动机的一个部 件 利用透视畸变匹配跟踪发动机的一个部 件
首要关键词 可变形模板
二维标定可 变形模板 未标定可变 形模板
变形模板匹 配 透视畸变匹 配
透视畸变匹 配 透视畸变匹 配
find_scaled_shape_model.hdev 寻找尺度变化的形状模板 find_shape_model_max_deformation.hdev 寻找形状模板(最大变形) inspect_shampoo_label.hdev 检测香波商标位置 matching_coins.hdev 硬币匹配 matching_defocused_pcb.hdev 匹配失焦pcb matching_deformed_bulb.hdev 匹配畸变的灯泡 matching_green_dot.hdev 回收标志匹配 matching_image_border.hdev 图像越边缘匹配 matching_multi_channel_clamp.hdev 多通道匹配夹钳
光学字符检测
例程名
adaption_ocv.hdev 自适应ocv
print_check.hdev 打印检测
print_check_single_chars.hdev 逐个字符打印检测
print_quality.hdev 打印质量
write_ocv.hdev ocv的写入
模板匹配(可变形)
例程名
create_local_deformable_model_xld.hdev 创建局域可变形的xld模板 create_planar_calib_deformable_model_xld.hdev 创建平面标定的可变形xld模板 create_planar_uncalib_deformable_model_xld.hdev 创建平面未标定的可变形xld模板 detect_road_signs.hdev 检测路标 find_local_deformable_model.hdev 寻找局部变性模板 locate_car_door.hdev 车门定位
贡献者清单
贡献者 臧雪 赫子 吴敬鑫
进行传播; 于查找; 栏留下印记; 文档而准备,禁止广告; 前对应halcon版本。
工具再替代,再行更替。 原始例程名,第二行为例程名直译 00.之类外其余都翻译为中文。原始英文描述另开文档记录。 方法方向。如形状匹配相关例程,方法方向关键词为形状匹配。 量言简意赅。 下一字母顺序,空格和下划线为单词分隔符。 向于更大显示与文字说明紧凑要求,后期考虑更好解决方案)
共享协议V1.0 1.文档为开源编辑文档,任何人都可以做修改并进行传播; 2.文档针对的是halcon例程,核心围绕使例程便于查找; 3.任何对文档做了可见的贡献,有权在贡献者一栏留下印记; 4.除贡献者一栏外,其余词汇都是为了补充规范文档而准备,禁止广告; 5.版本号点之后每修改10%,增加一个编号,点之前对应halcon版本。 “1”对应halcon11。 6.后续有需要,多人讨论形式更改协议。
二维物体识别
围训练和匹配
利用形状匹配在透视畸变图像中识别二 二维标定 二维位置定位
维平面目标,相机没有垂直于目标物平
二维物体识别
面
用变化的模板检测印品质量。目标位置 图像位置转 光学字符识别
变化,被检测图像要转换成模板图像的 换
几何转换
位置,得到该图位置坐标
4.次要关键词,其余用来描述该例程的词汇,尽量言简意赅。 5.排列顺序,按照英文首字母排列,相同情况按下一字母顺序,空格和下划线为单词分隔符。 6.新增图示栏,增加例程有代表性图像。(图片倾向于更大显示与文字说明紧凑要求,后期考虑更好解决
文档样式 1.共享协议 2.文档说明 3.文档样式 4.例程标注 6.版本更替说明(包含该版本主要修订内容,贡献者) 7.贡献者清单(加入时间排序,新加入者放前面)
stationary camera self calibration.hdev 固定相机自标定
版本更替说明
2014/8/31 版本号:V1.1
新增拼接,模板匹配(基于形状),模板匹配(可变形), 光学字符检测 四条例程分支;新增图片栏,例程名红色字 体样式,算子及本地过程函数蓝色字体样式。
2014/08/22 吴敬鑫创建halcon例程标注文档V1.0版本
matching_multi_channel_yogurt.hdev 多通道匹配优格 measure_fill_level.hdev 测量灌满水平 multiple_models.hdev 多模板 multiple_objects.hdev 多目标 multiple_scales.hdev 多尺度 pm_measure_board.hdev 电路板测量 pm_multiple_dxf_models.hdev DXF多模板文件匹配
各向异性
利用max_deformations算子寻找有一定 最大变形匹 二维位置定位
变形的可可包装,也可用局部变形匹配 配
二维物体识别
更鲁棒,而此法更快
在晶元镜模具定位
形状匹配 二维位置定位
利用局部变形匹配寻找榛果巧克力商 局部变形
标,可与max_deformations法比较,但
此法更鲁棒
寻找旋转和缩放的模板
仿射变换
寻找最大畸变形状模板,调整
畸变匹配
max_deformation参数实现最大畸变匹 匹配统计
检测香波瓶上的商标是否在规定的位置 商标检测
范围内,统计位置误差和匹配实现率
用形状匹配区分硬币
在失焦图像中检测一个PCB的位置
失焦匹配
二维位置定位 二维物体识别
二维位置定位 二维物体识别 二维位置定位 二维物体识别 二维位置定位 二维物体识别 二维位置定位 二维物体识别 二维位置定位
利用颜色形状匹配寻找不同口味的优格 彩色形状匹 二维位置定位