三相异步电机双PWM驱动控制系统
三相异步电动机 foc 控制 pwm 变频调速工作原理

三相异步电动机的FOC控制是一种利用变频器控制三相交流马达的技术,它通过调整变频器的输出频率、输出电压的大小及角度,来控制马达的输出。
具体来说,FOC控制通过调整PWM(脉冲宽度调制)信号的占空比,来控制变频器的输出电压,从而控制马达的转速。
PWM信号是一种方波信号,其占空比是指在一个周期内高电平时间与整个周期时间的比值。
当占空比变化时,变频器输出的平均电压也会变化,从而改变马达的转速。
在FOC控制中,首先需要将三相输出电流及电压以矢量来表示,这个过程称为矢量控制或磁场定向控制。
通过调整变频器的输出频率和电压大小,可以控制马达的磁场强度和转速。
对于有传感器FOC,由于电机的传感器(一般为编码器)能反馈电机转子的位置信息,因此在控制中可以不使用位置估算算法,控制起来相对无传感器FOC简单。
然而,对于无传感器FOC,由于没有传感器来反馈电机转子的位置信息,因此需要使用位置估算算法来控制马达的转速。
总之,三相异步电动机的FOC控制利用PWM信号来控制变频器的输出电压,从而控制马达的转速。
它是一种高效、精确的电机控制方法,被广泛应用于各种工业场合。
三相直流电机 pwm驱动原理

三相直流电机 pwm驱动原理三相直流电机(BLDC)是一种无刷电机,它采用三相交流电源和电子换向器来提供电机转子的转子,以实现高效率和高控制性能。
其中,PWM(Pulse Width Modulation)驱动是一种常见的驱动方式,它通过调整电机供电的脉冲宽度及频率来实现对电机速度和转矩的精确控制。
BLDC电机的架构包括定子和转子。
定子是由三个线圈组成的,每个线圈与电源相连,形成一个三相交流电源。
转子则是由永磁体组成的,它被安装在电机轴上,并通过电机驱动器进行驱动。
电机驱动器通过检测转子位置并适时地触发相应的线圈,以产生恰当的磁场来推动转子的运动。
PWM驱动是通过调整电机供电的脉冲宽度及频率来控制电机转速和转矩的方法。
具体实现上,PWM驱动使用电子开关(如晶体管或MOSFET)来控制电机驱动器的输入电流和电压。
通过调整电子开关的开关周期和占空比,可以改变电机驱动器输入电流的平均值,从而控制电机的运行状态。
在PWM驱动中,电子开关以固定的频率切换开关状态,通过开关控制电流向电机驱动器的输送和截断。
开关周期就是每个切换周期的时间。
占空比则是脉冲开启时间与开关周期之比。
占空比越大,表示开启时间越长,电流平均值越大;反之,占空比越小,电流平均值越小。
对于三相直流电机,每个线圈的电流都是通过PWM驱动进行控制的。
换向控制是通过在三个线圈之间循环切换来实现的。
即在每个PWM 周期内,电机驱动器按顺时针或逆时针的方式依次激活线圈。
在每个激活线圈的时间段内,电流被加载到该线圈上,形成一个可变磁场,推动转子运动。
在PWM驱动中,控制电机的转速和转矩的关键是调整占空比。
通过增加或减小占空比,可以改变电机驱动器输入电流的平均值,从而控制电机的输出功率。
此外,调整PWM的频率也可以影响电机的性能。
通常情况下,增加PWM频率能够减小电机的转矩波动和噪声,提高系统的响应速度和效率。
总结起来,PWM驱动是一种通过调整电机供电的脉冲宽度及频率来精确控制电机转速和转矩的方法。
三相异步电机
三相异步电机三相异步电机(Triple-phase asynchronous motor)是靠同时接入380V三相交流电源(相位差120度)供电的一类电动机,由于三相异步电机的转子与定子旋转磁场以相同的方向、不同的转速成旋转,存在转差率,所以叫三相异步电机。
工作原理电机的形式很多,但其工作原理都基于电磁感应定律和电磁力定律。
因此,其构造的一般原则是:用适当的导磁和导电材料构成互相进行电磁感应的磁路和电路,以产生电磁功率,达到能量转换的目的。
三相异步电机是感应电机,定子通入电流以后,部分磁通穿过短路环,并在其中产生感应电流。
短路环中的电流阻碍磁通的变化,致使有短路环部分和没有短路环部分产生的磁通有了相位差,从而形成旋转磁场。
通电启动后,转子绕组因与磁场间存在着相对运动而感生电动势和电流,即旋转磁场与转子存在相对转速,并与磁场相互作用产生电磁转矩,使转子转起来,实现能量变换。
电动机分类1.按工作电源分类根据电动机工作电源的不同,可分为直流电动机和交流电动机。
其中交流电动机还分为单相电动机和三相电动机。
2.按结构及工作原理分类根据电动机按结构及工作原理的不同,可分为直流电动机,异步电动机和同步电动机。
同步电动机还可分为永磁同步电动机、磁阻同步电动机和磁滞同步电动机。
异步电动机可分为感应电动机和交流换向器电动机。
感应电动机又分为三相异步电动机、单相异步电动机和罩极异步电动机等。
交流换向器电动机又分为单相串励电动机、交直流两用电动机和推斥电动机。
直流电动机按结构及工作原理可分为无刷直流电动机和有刷直流电动机。
有刷直流电动机可分为永磁直流电动机和电磁直流电动机。
电磁直流电动机又分为串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。
永磁直流电动机又分为稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。
3.按起动与运行方式分类根据电动机按起动与运行方式不同,可分为电容起动式单相异步电动机、电容运转式单相异步电动机、电容起动运转式单相异步电动机和分相式单相异步电动机。
控制三相异步电机电机正反转电路有几种方法?

控制三相异步电机正反转的电路有多种方法,每种方法都适用于不同的应用和控制要求。
以下是一些常见的控制三相异步电机正反转的方法:
1.接触器控制法:
这是一种传统的正反转控制方法,通过两个磁性接触器来改变电机的接线顺序。
当一个接触器闭合时,电机正转;当另一个接触器闭合时,电机反转。
必须保证两个接触器不会同时闭合,以避免短路。
2.手动星-三角开关法:
使用手动星-三角开关改变三相电机的接线方式来实现正反转控制。
通过调节开关位置,可以选择电机的运行方向。
3.变频器(Inverter)控制法:
变频器可以通过改变电机供电的频率和相位来控制电机的速度和方向。
改变输出频率的顺序,即可控制电机的正反转。
这种方法能提供平滑的启动、变速和制动控制。
4. PLC控制法:
可编程逻辑控制器(PLC)可以用来控制接触器或其他开关设备,实现电机正反转和其他复杂控制逻辑。
PLC控制提供了高度
的自动化和灵活性。
5.固态继电器(SSR)或功率半导体开关法:
使用固态继电器或者功率半导体设备(如晶闸管、IGBT)来控制电机的供电和断电,从而控制运转方向。
这种方法同样可以实现电机的快速启停和方向切换。
6.电子式正反转器件:
专门设计的电子式正反转控制器可以内嵌到电机控制电路中,为电机提供正反转的指令。
在选择三相异步电机的正反转控制方法时,应基于特定应用的需求考虑成本、复杂度、控制精度、启动电流和保护需求等因素。
例如,对于需要高精度和可编程控制的应用,变频器或PLC可能是更好的选择。
对于简单的开关控制,接触器和手动开关可能更加经济实惠。
PWM型变频器的基本控制方式
PWM型变频器的基本控制方式通用的PWM型变频器是一种交—直—交变频,通过整流器将工频交流电整流成直流电,经过中间环节再由逆变器将直流电逆变成频率可调的交流电,供给交流负载。
异步电动机调速时,供电电源不但频率可变,而且电压大小也必须能随频率变化,即保持压频比基本恒定。
PWM型变频器一般采用电压型逆变器。
根据供给逆变器的直流电压是可变的还是恒定的,变频器可分成两种基本控制方式。
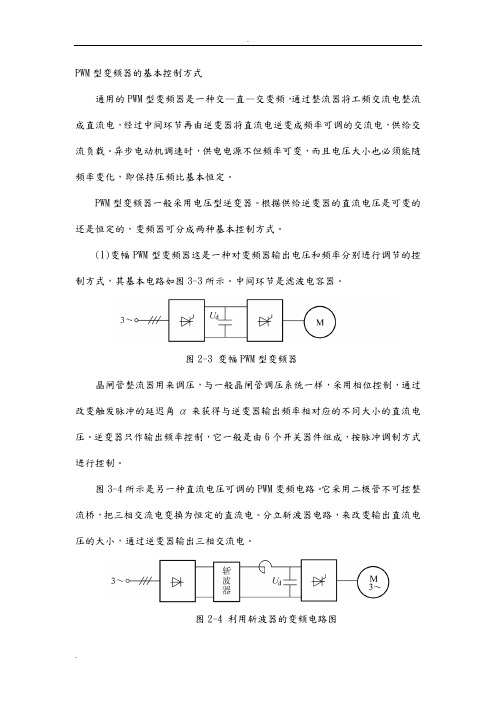
(1)变幅PWM型变频器这是一种对变频器输出电压和频率分别进行调节的控制方式,其基本电路如图3-3所示。
中间环节是滤波电容器。
图2-3 变幅PWM型变频器晶闸管整流器用来调压,与一般晶闸管调压系统一样,采用相位控制,通过改变触发脉冲的延迟角α来获得与逆变器输出频率相对应的不同大小的直流电压。
逆变器只作输出频率控制,它一般是由6个开关器件组成,按脉冲调制方式进行控制。
图3-4所示是另一种直流电压可调的PWM变频电路。
它采用二极管不可控整流桥,把三相交流电变换为恒定的直流电。
分立斩波器电路,来改变输出直流电压的大小,通过逆变器输出三相交流电。
图2-4 利用斩波器的变频电路图以上两种调压式变频电路,都需要两极可控功率级,相比较,采用晶闸管整流桥可以获得更大功率的直流电,由于可控整流桥采用相位控制,输入功率因数将随输出直流电压的减小而降低;而斩波式调压,输入功率变流级采用的是二级管整流桥,所以输入端有很高的功率因数,代价是多了一个斩波器。
另外,就动态响应的快速性来说后者比前者好。
(2)恒幅PWM型变频器恒幅脉宽调制PWM式变频电路如图3.3所示,它由二极管整流桥,滤波电容和逆变器组成。
逆变器的输入为恒定不变的直流电压,通过调节逆变器的脉冲宽度和输出交流电压的频率,既实现调压又实现调频,变频变压都是由逆变器承担。
此系统是目前使用较普遍的一种变频系统,其主电路简单,只要配上简单的控制电路即可。
它具有下列主要优点:1)简化了主电路和控制电路的结构。
三相异步电动机的几种调速方式
三相异步电动机的几种调速方式一、手动控制调速手动控制是一种最普遍的三相异步电动机调速方式。
它依靠加装变压器、电阻器或多脉冲变压器等器件,调节其输入电压、输入频率或输出电压,从而在一定范围内实现电动机的速度调节。
手动控制调速简单易行,但需要对其进行操作并且无法在一定时间内快速响应,因此其调速效果难以满足大功率调速应用的需求。
二、电压型调速又称为调压调速,它利用晶闸管、继电器等智能控制器调节电动机供电输入电压或输出电压,控制电动机转速。
这种调速方式具有精度高、响应快的优点,而且兼容性好,可实现精细调节。
三、频率型调速频率型调速是运用变频器将变频器输入电源的固定频率变换为可调的变频电源,并通过变频器控制电动机转速。
变频器能够调节电动机速度,实现电机无极调速,从而应用广泛。
此外,特别适用于中低速大扭矩的电动机。
四、矢量控制调速矢量控制调速又称为磁场定向控制调速。
它是一种高精度、高响应速度的调速方式,它利用磁场定向技术,利用电机开机后的瞬态响应,精确测量电机位置并控制电机转速。
与其它调速方式相比,矢量控制调速能够实现缓启动、粘滑保护,并且可以自动调整电磁场大小和角度,实现高速、高精度的调速。
五、惯量调节法惯量调节法是利用电动机惯性和输出转矩的反比关系控制电动机转速的,通常应用于重载起动场景中的电动机调速。
它适用于一些运行要求高的场合,在某些情况下,可达到更好的调速效果,但一般不适用于低速调节。
六、PWM调速PWM调速广泛应用于三相异步电动机调速中,它结合了电压调速和频率调速的优点,而且具有成本低、可靠性高等优点。
PWM调速采用高频脉冲宽度调制技术,调节输出电压的宽度,从而控制电动机转速。
PWM调速还可以实现过流保护、欠压保护等,应用性强。
以上为六种三相异步电动机的调速方式,每种调速方式都有其适用的场合。
根据实际应用需求,选择合适的调速方式可以实现电动机稳定、高效的工作。
双馈异步电机双pwm变流器控制的仿真研究

华中科技大学硕士学位论文双馈异步电机双PWM变流器控制的仿真研究姓名:***申请学位级别:硕士专业:水利水电工程指导教师:***2011-03华中科技大学硕士学位论文摘要双馈异步电机双PMW(Pulse Width Modulation,脉冲宽度调制)变流器以两个完全对称的PWM变流器通过直流母线连接而成,其输出作为双馈异步电机转子的输入直接控制着双馈异步电机的运行状态,双馈异步电机运行控制的核心就是其变流器的控制。
鉴于此,本文对双馈异步电机双PWM变流器控制进行仿真研究。
本文首先分析了双PWM变流器的特点,阐述了双馈异步电机双PWM变流器的工作原理,然后建立了双PWM变流器在三相静止坐标系下的数学模型,再利用坐标变换理论,进一步建立了双PWM变流器在两相静止坐标系以及两相旋转坐标系下的数学模型。
依据建立的数学模型,在介绍了矢量控制原理的基础上,确定了网侧变流器电网电压定向的矢量控制策略,建立了网侧变流器的控制模型,并根据控制模型设计出了网侧变流器的控制框图。
然后,本文建立了双馈异步电机的数学模型,并以此为基础确定了机侧变流器定子磁链定向的矢量控制策略,建立了机侧变流器的控制模型,并据此设计出了机侧变流器的控制框图。
最后,本文根据设计的控制框图利用MATLAB/LIMULINK仿真软件建立了网侧变流器和机侧变流器的仿真模型,并在此基础上建立了双PWM变流器的仿真模型,利用仿真模型对前面建立的控制模型进行了仿真研究。
仿真结果显示网侧变流器控制和机侧变流器控制都达到了控制目标。
关键字:双馈异步电机;双PWM变流器;控制;仿真华中科技大学硕士学位论文AbstractThe dual-PMW converter which used in the Doubly-Fed Induction Generator is consisted of two fully symmetrical PWM converters; these two converters are connected through a DC bus. The output of the generator-side converter, which is the input of the rotor, directly controls the running of the Doubly-Fed Induction Generator. The dual-PMW converter control is the core of the Doubly-Fed Induction Generator running control. In view of this, the paper attempt to do some simulation research of the control of dual-PMW converter, which is used in the Doubly-Fed Induction Generator.Firstly, the characteristics of the dual-PWM converter were analyzed in this paper, and the work principle of the dual-PMW converter was elaborated. Then the paper established the mathematical model from three-phase static coordinate system of the Doubly-Fed Induction Generator.According to the coordinate transformation theory, the paper further established the mathematical model of the Doubly-Fed Induction Generator from the two-phase static coordinate system and the two-phase rotating coordinate system. Based on the mathematical model, after the introduction of the principle of vector control, the paper identified the power grid voltage vector orientation as the method of the control of grid-converter, then established the control model of the grid-side converter, and designed the control diagram of the grid-side converter. Next, the paper established the mathematical model of the Doubly-Fed Induction Generator. Based on the mathematical model, stator flux vector orientation was identified as the control fashion of generator-side converter, then control model was established and control diagram was designed, too.Finally, in use of the MATLAB/LIMULINK simulation software, according to the control diagram, the paper established the simulation model of the dual-PMW converter. In the light of the simulation model, the paper did a series of simulation studies. The simulation results showed that the control targets of the grid-side converter and the generator-side converter wear achieved successfully.Key words: DFIG; dual-PMW converter; control; simulation独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
三相异步电动机连续控制电路原理

一、概述三相异步电动机是工业生产中常用的一种电动机,它具有结构简单、可靠性高、效率高等优点,在很多领域都有广泛的应用。
而对于三相异步电动机的控制,连续控制电路是一种常见的控制方法,它通过对电动机的供电电压进行调节,实现对电动机转速的连续控制,是一种有效的控制手段。
本文将介绍三相异步电动机连续控制电路的原理,包括其基本原理、实现方式和应用。
二、三相异步电动机基本原理1. 三相异步电动机的结构和工作原理三相异步电动机是一种感应电动机,由定子和转子组成。
当通过定子绕组通入三相交流电时,会在定子绕组中产生一个旋转磁场。
转子由感应电动机的工作原理可知,在这旋转磁场的作用下,转子内也会产生感应电动势,从而使转子产生转动运动。
通过控制定子绕组中的电流或转子上的电流,可以实现对三相异步电动机的控制。
2. 三相异步电动机的控制原理三相异步电动机的控制原理主要是通过改变电动机的供电电压和频率来实现。
其中,改变电动机的供电电压可以实现对电动机转矩和转速的控制;而改变电动机的供电频率,则可以实现对电动机转速的控制。
在连续控制电路中,通常采用改变电动机的供电电压来进行控制。
三、三相异步电动机连续控制电路原理1. 连续控制电路的基本结构连续控制电路的基本结构包括电源模块、控制模块和输出模块。
电源模块负责将输入的交流电转换为可供电动机使用的直流电;控制模块负责对输出电压进行调节,实现对电动机的控制;输出模块将调节后的电压提供给电动机使用。
2. 连续控制电路的工作原理连续控制电路通过控制控制模块中的电路来改变输出电压,从而实现对电动机的控制。
一般来说,控制模块中会采用脉宽调制(PWM)或者调压变压器来实现对输出电压的调节。
通过改变控制模块中的控制信号,可以精确地调节输出电压,从而实现对电动机转速的连续控制。
四、三相异步电动机连续控制电路的实现方式1. 脉宽调制(PWM)控制方式脉宽调制是一种常用的连续控制方式,它通过改变输出脉冲的宽度来实现对输出电压的调节。
三相异步电动机(7.5KW电机)变频调速带PG闭环失量控制系统参数的设置与 应用(616G5)
三相异步电动机(7.5KW电机)变频调速带PG闭环失量控制系统参数的设置与应用(616G5)学校:华北电力大学院系:专业:电气工程及其自动化指导教师:姓名:学号:引言由于电力电子技术的不断发展和进步,伴随着新的控制理论的提出与完善,使交流调速传动,尤其是性能优异的变频调速传动得到飞速的发展。
近年来,变频器的售价不断下降,而其使用功能却不断提升和扩大变频器的大量推广使用,在节能、省力化、自动化及提高生产率、提高质量、减少维修和提高舒适性等多方面都取得了令世人瞩目的应用效果。
1目录一、交流调速系统概述 (3)二、变频调速系统 (4)三、变频器的原理 (6)四、电机选择及参数 (9)五、旋转编码器选择及参数 (11)六、安川变频器(616g5)结构形式 (12)七、安川变频器(616g5)参数设定 (13)八、结束语 (20)参考文献: (21)一、交流调速系统概述调速系统的发展三相交流电机自十九世纪发明以来走过了100多年历史,电力拖动控制技术也随之日渐成熟,已从最初直接起动发展成目前的变频调速。
电机在恒压下直接起动时电流约为其额定值的4-7倍,电机转速要在很短时间内从零升至额定值将产生很大冲击,且在起动瞬间大电流作用下,会引起电网压降,甚至严重影响电网内其它设备正常运行。
为此,改善电机起动状态,使之处于低或无冲击及平滑柔和环境,各种限流起动的方法便应运而生。
变频调速技术是随交流电机无级调速的需要而诞生的。
20世纪60年代后半期开始,电力电子器件从SCR(晶闸管)、GTO(门极可关断晶闸管)、BJT(双极型功率晶体管)、MOSFET(金属氧化物半导体场效应管)、SIT(静电感应晶体管)、SITH(静电感应晶闸管)、MCT(MOS控制晶体管)、MCT(MOS控制晶闸管)发展到今天的IGBT(绝缘栅双极型晶体管)、HVIGBT(耐高压绝缘栅双极型晶闸管),器件更新促使电力变换技术的不断发展。
从20世纪70年代开始,脉宽调制变压变频(PWM-VVVF)调速研究引起了人们的高度重视,到20世纪80年代作为变频技术核心的PWM模式优化问题吸引着人们的浓厚兴趣,并得出诸多优化模式,其中以鞍形波PWM模式效果最佳。
三相异步电机矢量变频

三相异步电机矢量变频三相异步电机作为现代工业中最为常见的电动机类型之一,其性能与运行效率对于整个工业体系的能源消耗和生产力具有重要影响。
随着科技的不断进步,对于三相异步电机的控制技术要求也日益提高。
其中,矢量变频技术作为一种先进的电机控制技术,为三相异步电机的高效、稳定运行提供了有力支持。
一、三相异步电机的基本原理三相异步电机是利用三相交流电源供电的一种交流电机。
其工作原理基于电磁感应定律,即当定子绕组通入三相交流电时,会在定子中产生一个旋转磁场。
这个旋转磁场以同步转速在定子中旋转,同时切割转子导条,从而在转子导条中产生感应电流。
这个感应电流与旋转磁场相互作用,产生电磁转矩,从而使转子转动。
二、矢量变频技术的引入传统的三相异步电机控制方法主要依赖于电机的稳态模型,难以实现对电机转矩和磁场的独立控制。
这在一定程度上限制了三相异步电机的性能发挥和节能潜力。
为了解决这一问题,矢量变频技术应运而生。
矢量变频技术,又称磁场定向控制或矢量控制,是一种基于电机动态模型的高性能控制方法。
它将三相异步电机的定子电流分解为磁场产生分量和转矩产生分量,并分别进行控制。
通过这种方法,可以实现对电机磁场和转矩的独立、精确控制,从而显著提高电机的运行效率和动态性能。
三、矢量变频技术的实现矢量变频技术的实现主要依赖于坐标变换和PWM(脉宽调制)技术。
坐标变换包括Clarke变换和Park变换,它们可以将三相异步电机在定子坐标系下的数学模型转换为旋转坐标系下的数学模型,从而简化控制算法的设计和实现。
PWM技术则用于将控制算法输出的电压或电流指令转换为适合逆变器开关的PWM信号,以驱动电机运行。
在矢量变频控制系统中,通常需要测量电机的转速、转子位置以及定子电流等信号作为反馈信号。
这些信号经过处理后与给定值进行比较,产生误差信号。
误差信号经过控制器(如PI控制器)的调节后输出控制指令,再经过坐标变换和PWM调制后驱动电机运行。
通过这种方法,可以实现对电机转速、转矩和磁场的精确控制。
三相异步电机交流变频调速系统设计实验
三相异步电机交流变频调速系统设计实验指导书仇国庆编写重庆邮电大学自动化学院测控技术实验中心2010/11/2三相异步电机交流变频调速系统设计实验指导书一、实验目的:1. 了解三相异步电机调速的方法;2. 熟悉交流变频器的使用;3. 掌握三相异步电机交流变频调速系统设计。
4. 交流异步电动机机械特性及变频调速特性测试二、控制系统设计要求系统设计要求能够实现三相异步电动机的如下状态的控制:正转;反转;停止;点动;加速;减速。
图1 控制系统硬件结构图三、基本知识:1.异步电动机调速系统种类很多,常见的有:(1)降电压调速;(2)电磁转差离合器调速(3)绕线转子异步电机转子串电阻调速(4)绕线转子异步电机串级调速(5)变极对数调速(6)变频调速等等。
2.三相交流异步电动机2.1 异步电动机旋转原理异步电动机的电磁转矩是由定子主磁通和转子电流相互作用产生的。
n转速顺时针旋转,转子绕组切割磁力线,产生转子电流⑴磁场以⑵通电的转子绕组相对磁场运动,产生电磁力⑶ 电磁力使转子绕组以转速n 旋转,方向与磁场旋转方向相同2.2 旋转磁场的产生旋转磁场实际上是三个交变磁场合成的结果。
这三个交变磁场应满足:⑴ 空间位置上互差rad 3/2π电度角。
由定子三相绕组的布置来保证⑵ 在时间上互差rad 3/2π相位角(或1/3周期)。
由通入的三相交变电流来保证。
2.3 电动机转速产生转子电流的必要条件:是转子绕组切割定子磁场的磁力线。
因此,转子的转速n 必须低于定子磁场的转速0n 。
两者之差称为转差:n n n -=∆0转差与定子磁场转速(常称为同步转速)之比,称为转差率:0/n n s ∆=同步转速0n 由下式决定:p f n /600=上式中,f 为输入电流的频率,p 为旋转磁场的极对数。
由此可得转子的转速:p s f n /)1(60-=3.异步电动机调速由转速p s f n /)1(60-=可知异步电动机调速有以下几方法:(1) 改变磁极对数p (变极调速)定子磁场的极对数取决于定子绕组的结构。
基于PWM的转速电流双闭环控制系统的异步电机

篝 E I I u 乱
’ F亍= } … = = == = = == = = {
… … … … ~ … 一 … 一 — …
j
’ : i
。
L一 — — — — — — — 。 。 — — — . — — . . i . — — — — — + — . — j 一
流
图5 整流二极管通过的电压及电流 图 6 逆变器中 I G B T 通过的电压及电流
2 . 3 电机 的角 速 度 由 c ^ ) =1 2 0 r a d / s加 速 到 c . ) =1 6 0 r a d / s ,再 减速到 6 0 =1 0 0 r a d / s这个加减速过程的仿真
摘 要 :以下就浊点萃取 一原子吸收法测定水样 中痕量铅 的研 究进 行 了探讨 ,建立了浊 点萃取 一原子吸收法测定水 中微量的铅 的新方法 ,旨在为更好地进行水样 中痕量铅 的研 究提供 参考借鉴 。 关 键词 :浊点萃取 ;原子吸收 ;痕 量铅 ;研 究
中 图分 类 号 :X1 3 2 文 献 标 识 码 :A 文 章 编 号 :1 0 0 0 -8 1 3 6( 2 0 1 3) 2 4 一( ) ( 】 1 1 -0 2
瞧| j
电流 轴分量 : : .
电流 g 轴分量 : = 4 丽 T E L ; 2
( 2)
, 、
图 7 加减 速过 程的 整流 后电压 曲线 图 8 转速 加减速 时对 应定 子电压 、 电流 以及 电机转 速转 矩 曲线
从图7 、 8 可知 , 异 步电机在端 电压基本保 持不变 的情况下 , 电机在加减速过程中的电流 电磁转矩也随之变化 ,无论加速还
2 仿真
2 . 1 P W M 波 的产 生
三相异步电机调速方法
三相异步电机调速方法三相异步电机调速方法主要有电压调制控制、频率调制控制、转子电流调制控制和直接转矩控制等。
下面分别详细介绍这些调速方法。
1. 电压调制控制:电压调制控制是通过改变电机的电压来实现调速。
这种方法主要是改变电压的幅值或频率来改变电机的转速。
在电压调制控制中,可以使用PWM调制技术来产生具有不同调制频率和占空比的电压。
当调制频率和占空比增加时,电压的平均值也会增加,从而使电机的转速提高。
2. 频率调制控制:频率调制控制是通过改变电机的供电频率来实现调速。
在频率调制控制中,可以使用变频器来改变电机的供电频率。
当供电频率增加时,电机的转速也会随之增加。
频率调制控制由于不需要改变电压的幅值,所以可以保持电机的额定电压,从而提高电机的效率和稳定性。
3. 转子电流调制控制:转子电流调制控制是通过改变电机的转子电流来实现调速。
在转子电流调制控制中,可以使用向转子注入适量电流的方法来改变电机的转速。
通过改变转子电流的幅值和相位角,可以实现电机的调速。
转子电流调制控制相对于电压调制控制和频率调制控制来说,需要更复杂的控制算法,但是可以实现更精确的调速效果。
4. 直接转矩控制:直接转矩控制是通过测量电机的电动势和电流来实现对电机转矩的直接控制,从而实现调速。
直接转矩控制是一种相对较为复杂的控制方法,但是可以实现对电机的转速和转矩进行独立控制。
在直接转矩控制中,需要使用专用的控制器和算法,来实时监测电机的电动势和电流,并根据测量值来控制电机的转矩。
综上所述,三相异步电机的调速方法有电压调制控制、频率调制控制、转子电流调制控制和直接转矩控制。
不同的调速方法适用于不同的应用场景,可以根据实际需求选择合适的调速方法。
这些方法都需要使用专用的控制器和算法来实现,以实现对电机转速的精确控制。
随着电力电子和控制技术的不断发展,三相异步电机调速方法的控制精度和稳定性也将不断提高。
三相异步电机控制器的工作原理

三相异步电机控制器的工作原理
三相异步电机控制器的工作原理是利用一个控制器来控制三相电机的运行。
控制器中包含了一些电子元器件和电路,用于控制电机的启动、停止和转速调节。
控制器中的电子元器件主要包括三相电流检测电路、三相电压检测电路、微处理器或控制芯片、功率晶体管或可控硅等。
三相电流检测电路用于检测电机的电流大小,可以实时监测电机的负载情况。
三相电压检测电路用于检测电机的供电电压大小,可以实时监测电机的电源情况。
微处理器或控制芯片是控制器的核心部件,用于处理各种信号和数据,实现对电机的控制。
根据输入的信号和数据,微处理器或控制芯片可以控制功率晶体管或可控硅的通断和导通角度,从而控制电机的转速和运行状态。
控制器还可以设置一些保护功能,如过流保护、过压保护和过载保护等。
当电机运行时,如果电流或电压超过了设定的阈值,控制器会自动断开电源或减小输出功率,以保护电机的安全运行。
总之,三相异步电机控制器通过检测电机的电流和电压,利用微处理器或控制芯片控制功率晶体管或可控硅的通断和导通角度,实现对电机的启动、停止和转速调节,同时具备保护功能,提高电机的运行效率和安全性。
三相异步电动机变频调速的原理

学习目标:三相异步电动机变频调速的原理变频器是利用电力半导体器件的通断作用将工频电源变换为另一频率的电能控制装置。
我们现在使用的变频器主要采用交一直一交方式(VVVF变频或矢量控制变频),先把工频交流电源通过整流器转换成直流电源,然后再把直流电源转换成频率、电压均可控制的交流电源以供给电动机。
变频器的电路一般由整流、中间直流环节、逆变和控制4个部分组成。
整流部分为三相桥式不可控整流器,逆变部分为IGBT 三相桥式逆变器,且输出为PWM波形,中间直流环节为滤波、直流储能和缓冲无功功率。
变频器选型:变频器选型时要确定以下几点:1)采用变频的目的;恒压控制或恒流控制等。
2)变频器的负载类型;如叶片泵或容积泵等,特别注意负载的性能曲线,性能曲线决定了应用时的方式方法。
3)变频器与负载的匹配问题;I.电压匹配;变频器的额定电压与负载的额定电压相符。
II.电流匹配;普通的离心泵,变频器的额定电流与电机的额定电流相符。
对于特殊的负载如深水泵等则需要参考电机性能参数,以最大电流确定变频器电流和过载能力。
III.转矩匹配;这种情况在恒转矩负载或有减速装置时有可能发生。
4)在使用变频器驱动高速电机时,由于高速电机的电抗小,高次谐波增加导致输出电流值增大。
因此用于高速电机的变频器的选型,其容量要稍大于普通电机的选型。
5)变频器如果要长电缆运行时,此时要采取措施抑制长电缆对地耦合电容的影响,避免变频器出力不足,所以在这样情况下,变频器容量要放大一档或者在变频器的输出端安装输出电抗器。
6)对于一些特殊的应用场合,如高温,高海拔,此时会引起变频器的降容,变频器容量要放大一挡。
变频器控制原理图设计:1)首先确认变频器的安装环境;I.工作温度。
变频器内部是大功率的电子元件,极易受到工作温度的影响,产品一般要求为0〜55℃,但为了保证工作安全、可靠,使用时应考虑留有余地,最好控制在40℃以下。
在控制箱中,变频器一般应安装在箱体上部,并严格遵守产品说明书中的安装要求,绝对不允许把发热元件或易发热的元件紧靠变频器的底部安装。
三相异步电动机变频调速系统设计及仿真.

天津职业技术师范大学课程设计说明书题目:三相异步电动机变频调速系统设计及仿真指导老师:班级:机检1112班组员天津工程师范学院课程设计任务书机械工程学院机检1112 班学生课程设计课题:三相异步电动机变频调速系统设计及仿真一、课程设计工作日自 2015 年 1 月 12 日至 2015 年 1 月 23 日二、同组学生:三、课程设计任务要求(包括课题来源、类型、目的和意义、基本要求、完成时间、主要参考资料等):1、目的和意义交流调速是一门重要的专业必修课,它具有很强的实践性。
为了加深对所学课程(模拟电子技术、数字电子技术、电机与拖动、电力电子变流技术等)的理解以及灵活应用所学知识去解决实际问题,培养学生设计实际系统的能力,特开设为期一周的课程设计。
2、具体内容写出设计说明书,内容包括:(1)各主要环节的工作原理;(2)整个系统的工作原理(包括启动、制动以及逻辑切换过程);(3)调节器参数的计算过程。
2.画出一张详细的电气原理图;3.采用Matlab中的Simulink软件对整个调速系统进行仿真研究,对计算得到的调节器参数进行校正,验证设计结果的正确性。
将Simulink仿真模型,以及启动过程中的电流、转速波形图附在设计说明书中。
4、考核方式1.周五采用口试方式进行考核(以小组为单位),成绩按百分制评定。
其中小组分数占60%,个人成绩占40%(包括口试情况和上交材料内容);2.每天上午8:30--11:30在综合楼226房间答疑。
五、参考文献1、陈伯时.电力拖动自动控制系统----运动控制系统(第3版).机械工业出版社,2003指导教师签字:教研室主任签字:目录第一章绪论 (2)第二章系统总体设计方案 (4)2.1 概述 (4)2.2系统组成结构及工作原理 (4)2.2.1恒压频比控制下的机械特性 (4)2.2.2变频器 (6)2.2.3变频器主电路工作原理 (6)2.2.4整流电路 (7)2.2.5逆变电路 (7)2.2.6调节器 (9)2.2.7启动制动 (10)第三章硬件设计及选型 (11)3.1主电路的设计 (11)3.2整流电路设计 (11)3.3逆变电路的设计 (12)第四章simulink仿真 (13)4.1建立模型 (13)4.2 未变频时仿真结果 (14)4.3变频时仿真结果(基频以下调速) (15)4.4变频时仿真结果(基频以上调速) (17)关于变频调速的总结 (18)附电气图 (19)参考文献 (19)第一章绪论在交流调速中,交流电动机的调速方法有三种:变极调速、改变转差率调速和变频调速。
三相异步同步电机控制原理

三相异步同步电机控制原理一、电机结构与工作原理三相异步同步电机是一种常用的交流电动机,其结构主要包括定子和转子两部分。
定子通常由铁芯、绕组和机座等组成,转子则由铁芯和绕组组成。
定子和转子之间存在空气间隙。
三相异步同步电机的工作原理基于电磁感应定律。
当三相电流通过定子绕组时,产生旋转磁场,该磁场与转子相互作用,使转子在旋转方向上旋转。
同步电机的转速与电源频率保持同步,而异步电机的转速则略低于电源频率。
二、同步电机与异步电机的区别1.转速:同步电机的转速与电源频率保持同步,而异步电机的转速则略低于电源频率。
2.结构:同步电机结构较为复杂,需要引入励磁系统来产生磁场,而异步电机结构相对简单,无需励磁系统。
3.性能:同步电机的控制精度较高,可用于高精度控制系统,而异步电机则适用于一般工业应用。
三、电机控制方法1.直接启动控制:通过直接连接电源和电机来启动电机,实现简单控制。
2.变频控制:通过改变电源频率来控制电机转速,实现调速和节能控制。
3.矢量控制:通过控制电机的电流和电压来实现高精度控制,适用于高要求应用场景。
4.伺服控制:通过位置、速度和力矩等传感器实现闭环控制,适用于高精度、高响应的应用场景。
四、控制器设计控制器是三相异步同步电机控制的核心部分,需要根据具体应用场景选择合适的控制器。
常用的控制器包括PLC、DSP、单片机等。
控制器设计需要考虑控制精度、响应速度、可靠性等因素。
五、转子位置检测与控制对于同步电机而言,转子位置是实现精确控制的关键参数之一。
通常采用位置传感器来检测转子位置,如光电编码器、旋转变压器等。
控制器根据位置传感器输出的信号来控制电机的转速和转向。
六、速度控制与调节速度控制是电机控制的重要环节之一。
通过改变电源频率或电机的输入电压来实现调速。
常用的调速方法包括PWM(脉冲宽度调制)调速、V/f控制等。
同时,还可以通过引入反馈控制系统来实现速度的精确调节。
七、启动与停车控制电机的启动和停车控制是电机控制的基本环节之一。
低共模干扰的双三相永磁同步电机SVPWM控制

低共模干扰的双三相永磁同步电机SVPWM控制张志锋;吴雪松;刘晓东【摘要】提出一种空间电压矢量脉宽调制(SVPWM)控制方法以降低双三相永磁同步电机系统的共模干扰.首先分析了电机驱动系统中共模电压产生的原因,然后利用双三相永磁同步电机电压矢量冗余的特点,在每一扇区内选择低共模电压幅值和变化频率的电压矢量组合,从而降低系统的共模干扰.理论分析和实验结果表明,采用该双三相永磁同步电机低共模干扰SVPWM控制方法,共模电压的幅值降低为直流母线电压的1/6,一个周期内共模电压的变化次数降低为2次,从而降低了系统的共模电流,并且当电机运行于中高速情况下,定子电流谐波并没有明显的增加.【期刊名称】《电工技术学报》【年(卷),期】2018(033)0z1【总页数】9页(P58-66)【关键词】双三相永磁同步电机;共模干扰;谐波;空间电压矢量脉宽调制【作者】张志锋;吴雪松;刘晓东【作者单位】沈阳工业大学电气工程学院沈阳 110870;沈阳工业大学电气工程学院沈阳 110870;国网辽宁省电力有限公司葫芦岛供电公司葫芦岛 125000【正文语种】中文【中图分类】TM351多相电动机多应用在航空航天、船舶舰艇、电力机车和电动汽车等要求提供低压大功率和高可靠性电机的领域。
对于多相电机驱动系统的研究,目前多集中在控制方法以及容错方面[1-6],而对多相电机共模电压和共模电流的研究较少。
共模电压普遍存在于使用脉冲宽度调制(Pulse Width Modulation, PWM)驱动的电机控制系统中[7]。
在实际电机驱动中,较大的共模电压在定子节点处会击穿绝缘油膜形成轴承电流从而烧毁电机。
而且共模电压变化快会产生噪声、对周围的元器件造成电磁干扰,由共模电压导致的电机绝缘的老化、发热、机械噪声和共振等都对电机运行产生不良影响[8-16]。
文献[8]提出了一种抑制双三相电机共模电压的空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)方法,采用不使用零电压矢量的控制策略有效地降低了共模电压,并且在很大程度上降低了共模电流的产生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上海理工大学研究生试题2010 /2011 学年第二学期课程名称:电力传动系统驱动与控制技术教师签章:年月日教研室主任审查意见:签章:年月日1.试题原稿请于考试前2周送研究生部。
2.编号栏由研究生部填写。
上海理工大学研究生课程试题* 2010/2011 学年第二学期考试课程电力传动系统驱动与控制技术学号姓名得分三相异步电机双PWM驱动控制系统设计与仿真常规功率变换器能实现交流电压幅值、频率和相数的改变,并能改善电能质量,在实际中得到非常广泛的应用。
但常见的功率变换器,由于其整流环节不可控,存在网侧功率因数低、谐波含量高等缺点,因而限制了它的应用范围。
双PWM变换器采用全控型功率开关器件,并引入PWM控制技术实现对整流部分的控制,能有效地消除变频装置对电网的谐波污染,提高功率因数,实现再生能量向电网回馈。
三相双PWM变频电源可分为PWM整流器和PWM逆变器两部分。
本文在双PWM变换器拓扑结构的基础上,分析了三相PWM整流器结构及其控制方法和三相PWM逆变器结构及其控制方法。
分析了PWM变换器能运行在整流和逆变状态的原理。
PWM整流器采用双闭环的控制结构,即电压外环和电流内环。
PWM逆变器采用电压滞环比较控制方案实现控制目标。
在理论分析的基础上,利用MATLAB simulink建双PWM功率变换器的系统仿真模型,并进行了系统仿真。
仿真结果表明能对PWM整流器输出直流电压和网侧输入交流电流进行有效控制,使他们的相位基本一致,三相交流输入的功率因数接近1,PWM逆变器也能实现逆变输出电压的频率和幅值均可调,并且逆变波形为三相准正弦波。
一、引言能源短缺是全球人类所面临的世纪性难题,节能减排也成为我国的基本国策。
国家制定了《节能中长期专项规划》,为实现规划目标,国家发展和改革委员会启动了“十一五”国家重点节能工程,电动机系统节能工程是其中之- [1]。
电动机是电能消耗的最大户,也是节电潜力最大的用户。
据统计,我国电动机总装机容量4亿多千瓦,其年用电量约为15000亿千瓦时,约占全国总发电量的65%~70%[2]。
因此,研究电动机系统的节能问题具有重大的现实意义和深远的可持续发展意义。
电动机系统能耗大、效率低的原因有两个方面。
其一是由于大*注:考题全部写在框内,不要超出边界。
内容一律用黑色墨水书写或计算机打印,以便复印。
部分电动机系统为直接拖动,造成大量的能源浪费。
其二是在牵引、矿井等需要频繁四象限运行的场合,大量的电动机制动时的再生能量通常被直接消耗掉,在大功率场合同样造成了能源的极大浪费。
随着电力电子技术的不断发展,功率器件的不断更新,控制技术的不断完善,针对第一个问题,目前越来越多的场合采用PWM(PulseWidt hModulation)逆变器对电机实施调速,能够有效地改善系统运行效率,极大地节约了能源。
然而,大多数的交流调速系统前端整流器采用二极管整流,对于上述第二个问题束手无策。
因此,用PWM逆变器取代二极管整流,与PWM逆变器一起,构成双PWM变换器,则不但能够解决第一个问题,而且能在负载制动时将能量直接回馈给电网,实现真正高性能的、高效的电动机系统。
二、双PWM变换器基本原理及发展现状2.1双PWM变换器原理双PWM拓扑结构如下图所示图1.1在双PWM结构,整流桥和逆变桥都采样全控的IGBT管,由于IGBT管的全控性,可任意控制其关断,这样当出现能量回馈时,能进行快速关断,不会产生过电流,实现交流电机快速四象限运行。
通过PWM整流控制,可以实现整流环节网侧电流正弦化,运行于单位功率因数,且能实现能量的双向流动。
电压型PWM可逆整流器采用全控器件,器件工作在高频状态,用高速度、高运算能力的DSP产生PWM控制脉冲,由于开关器件的开通和关断均是可控的,所以PWM整流器的电流波形也是可控的,其理想状态是交流输入电压和电流可保持同相位或反相位,即整流时为同相位,逆变时为反相位。
此时网侧功率因数近似为1,输入电流的谐波含量接近零,消除对电网的谐波污染。
由于PWM整流器采样直流输出电,因此还能对直流电压进行调整,在负载变化时,具有较快的响应速度,使直流输出电压稳定在一定的设定值。
因此说采用PWM整流器取代传统交一直一交变频器中不可控整流部分,不仅克服了上述传统变频器的缺点,还具有网侧电流为正弦波,网侧功率因数近似为1,较快的动态响应,易于模块化,易于冗余设计和电能双向传输等诸多优点,实现了调速节能和“绿色环保”的高度结合。
2.2国内外研究现状1964年,德国学者A.Sch?nung和H.Stemmler在《BBC评表》上发表文章,率先提出了脉宽调制变频的思想,他们把通讯系统中的调制技术推广应用于交流传动系统。
经过四十年的发展,脉宽调制(PWM)技术已发展成为现代功率变换器共同的和核心的技术,引起人们的高度重视,并得到深入的研究。
目前已经提出并得到应用的PWM控制方案不下十种。
从最初追求电压波形的正弦,到电流波形的正弦,再到磁通的正弦;从效率最优,转矩脉动最少,再到消除噪音等等,PWM控制技术的发展经历了一个不断创新和不断完善的过程,目前所有新的方案不断提出,针对多电平逆变器电路的PWM控制技术方兴未艾。
双PWM变频调速系统关键技术之一的PWM整流器研究始于20世纪80年代,这一时期由于自关断期间的日趋成熟及应用,推动了PWM技术的应用与研究。
1982年Busse Altred、Holtz Joachim首先提出了基于可关断器件的三相全桥PWM整流器拓扑结构及其网侧电沆幅相控制策略,并实现了电流型PWM整流器网侧单位功率因数正弦波电流控制。
1984年Akagi Hirofumi等提出了基于PWM整流器拓扑结构的无功补偿控制策略,这实际上就是电压型PWM整流器早期设计思想。
到20世纪80年代末,随着A.W.Green等提出了基于坐标变换的PWM整流器连续、离散动态数学模型及控制策略,PWM整流器的研究发展到一个新的高度[29”32]。
自20世纪90年代以来,PWM整流器一直是学术界关注和研究的热点。
随着研究的深入,基于PWM拓扑结构及控制的拓扑的拓展,相关的应用研究也发展起来,如前文所述有源滤波器、超导储能、交流传动等。
这些应用技术的研究,又促进了PWM整流器及其控制技术的进步和完善。
对于双PWM变频调速系统的研究同样开始于20世纪80年代,Kohlmeier等在1987年研制出基于GTO的高性能双PWM变频系统,开关频率为1.5KHz以下。
Blaabjerg等在1993年研制出基于IGBT的双PWM变频系统,开关频率4.8KHz。
目前来说,国外已有类似产品上市[13-16],例如富士公司生产的RHC系列双PWM交流传动系统,输入侧功率因数近似为1,可以高效率地进行能量再生,ABB公司生产的四象限运行的交流调速系统,如ACS611ACS617(容量1.5kW-1.12MW)。
国内对于双PWM变频调速系统的研究起步较晚,但发展比较迅速,目前其产品还很不成熟,不能满足要求。
同时,国外的此类装置价格昂贵,有的对电网的要求比较高,应用起来不方便。
二、PWM 整流器3.1 PWM 整流器原理概述从PWM 整流器的功能可见,PWM 整流器应该是一个其交、直流侧可控的四象限运行的变流器。
下面以模型电路为例说明其基本原理。
PWM 整流器模型电路如图1.2所示,它是由交流回路、功率开关管桥路以及直流回路组成。
其中交流回路包括交流电动势e 以及网侧电感L 等;直流回路包括负载电阻R 及负载电动势等;功率开关管桥路可由电压型或电流型桥路组成。
图1.2桥式整流由交、直流侧功率平衡关系得dc dc IV I V =⨯,因此,通过模型电路交流侧的控制,就可以控制其直流侧,反之亦然。
3.2电压型PWM 整流器原理PWM 整流器按直流储能形式不同分为电压型和电流型。
电压型PWM 整流器最显著的特征就是直流侧采用电容进行储能,从而使其直流侧呈现低阻抗的电压源特征。
而在电压型几种常见的拓扑结构中,三相桥式结构的PWM 整流器比较适用于三相电网平衡系统,因而使用较多。
3.3三相电压型PWM 整流器设计对三相VSR 系统的控制需实现两个控制目标:1)稳定直流侧电压;2)实现其交流侧在受控功率因数(如单位功率因数)工作。
为了实现第一个目标,控制系统中需控制直流侧电压,一般都采用电压闭环控制;对于第二个目标,则需通过控制电网侧输入电流的幅值和相位来实现。
目前,根据在控制环中是否采用电流闭环,可以把三相VSR 的电流控制策略分为间接电流控制和直接电流控制两大类。
3.4间接电流控制法间接电流控制又称幅相控制其实质上是,通过PWM控制,在VSR桥路交流侧生成幅值、相位受控的正弦PWM电压。
该PWM电压与电网电动势共同作用于VSR交流侧,并在VSR交流侧形成正弦基波电流,而谐波电流则由VSR交流侧电感滤除。
由于这种VSR 电流控制方案通过控制VSR交流侧电压进而达到控制VSR交流侧电流的目的,因而是一种间接电流控制技术。
这种间接电流控制由于无需设置交流电流传感器以构成电流闭环控制,因而是一种VSR简单控制方案。
间接电流控制主要问题在于,VSR电流动态响应不够快,甚至交流电流中含有直流分量,且对系统参数波动较敏感,因而常适用于对VSR动态响应要求不高且控制结构要求简单的应用场合。
3.5直接电流控制法针对三相VSR间接电流控制的上述不足,提出了直接电流控制。
直接电流控制与间接电流控制在结构上的主要差别在于:前者具有电流闭环,而后者没有。
在直接流控制方法中,首先通过运算求出交流侧输入电流指令值,再引入交流电流反馈,通过对交流电流的直接闭环控制,使其跟踪指令电流值。
因此,直接电流控制中一般都采用双闭环结构:直流电压外环和电流内环。
根据内环中不同的电流跟踪控制方法,可将直接电流控制分为多种类型,较常见的如开关频率固定PWM电流控制、滞环PWM电流控制等。
3.6三相VSR双闭环控制系统设计双闭环控制系统中,电压外环给电流内环输出指令有功电流,控制三相VSR直流侧电压,电流内环根据指令电流进行电流跟踪控制。
因此,双闭环控制系统的设计对系统的控制性能来说显得至关重要。
一般,多环控制系统的设计方法是:先设计内环,后设计外环。
三相VSR控制系统中,采用双环控制:电压外环和电流内环。
电压外环控制三相VSR直流侧电压,而电流内环按电压外环输出的电流指令进行电流控制,如实现单位功率因数正弦波电流控制。
控制框图如图1.3,先设计内环,再设计外环。
本设计电流内环与电压外环均采用Pl调节器。
四、PWM逆变器4.1 PWM逆变器原理及其简述逆变器的拓扑结构如图1.4所示。
整流部分简化为恒定的直流滤波电容电压,S表示全控的功率开关,D表示相应功率开关的续流二极管,三相负载近似等效为星型连接的串联电阻R和电感L,Io表示直流端的电流,lA表示输出的交流电流。