拉格朗日乘子法约束最优化
matlab 拉格朗日乘子法

matlab 拉格朗日乘子法拉格朗日乘子法是一种优化问题求解的常用方法。
它在约束条件下求解最优化问题,将约束条件引入目标函数中,通过引入拉格朗日乘子来求解。
本文将介绍拉格朗日乘子法的基本原理、应用场景以及具体求解步骤。
拉格朗日乘子法是由法国数学家约瑟夫·路易·拉格朗日在18世纪末提出的。
它的基本思想是将约束条件转化为目标函数的一部分,通过引入拉格朗日乘子来构建新的目标函数。
这样,原来的约束问题就可以转化为无约束问题,从而更容易求解。
在实际应用中,拉格朗日乘子法广泛应用于约束优化问题的求解。
比如,在经济学中,我们经常需要在一定的资源限制下,求解最大化利润或最小化成本的问题。
这类问题常常涉及到多个变量之间的相互制约关系,而拉格朗日乘子法可以很好地处理这种情况。
下面我们来介绍一下拉格朗日乘子法的具体求解步骤。
首先,我们需要明确优化问题的目标函数和约束条件。
假设我们要求解的问题是最大化函数f(x1, x2, ..., xn),而约束条件是g(x1, x2, ..., xn) = 0。
接下来,我们引入拉格朗日乘子λ,构建拉格朗日函数L(x1, x2, ..., xn, λ) = f(x1, x2, ..., xn) + λg(x1, x2, ..., xn)。
然后,我们需要求解拉格朗日函数的梯度为零的点。
也就是说,我们需要求解L的偏导数关于x1, x2, ..., xn和λ的值为零的点。
这些点被称为拉格朗日乘子法的驻点。
我们将求得的驻点代入原始的约束条件中,得到满足约束条件的解。
这些解可能是最大值、最小值或鞍点。
我们需要对这些解进行判断,找出最优解。
总结一下,拉格朗日乘子法是一种求解约束优化问题的常用方法。
它通过引入拉格朗日乘子将约束条件转化为目标函数的一部分,从而将原来的约束问题转化为无约束问题。
然后,通过求解拉格朗日函数的驻点,再结合原始的约束条件,求得满足约束条件的最优解。
拉格朗日乘子法在实际应用中具有很高的灵活性和广泛的适用性。
增广拉格朗日乘子法的停机准则

增广拉格朗日乘子法的停机准则增广拉格朗日乘子法是一种用于解决约束最优化问题的方法,它将约束优化问题转化为一个无约束问题。
停机准则是指算法在何时终止迭代,即达到了满足一定条件的状态。
在增广拉格朗日乘子法中,通常采用以下停机准则:
1. 对偶残差:
•定义对偶残差,用于判断算法是否收敛。
对偶残差是原始问题和对偶问题的差值。
当对偶残差趋近于零时,可以认为算法接近最优解。
2. 原始残差:
•原始残差是原始问题的约束残差,表示当前解是否满足原始问题的约束条件。
当原始残差趋近于零时,说明当前解在原始问题的可行域内。
3. 停机阈值:
•设置一个停机阈值,当对偶残差和原始残差都小于该阈值时,算法停止迭代。
这个阈值通常是一个较小的正数,表示算法接近最优解。
4. 迭代次数限制:
•设置最大迭代次数,当算法达到指定的迭代次数时,强制停止迭代。
这是为了防止算法陷入无限循环或迭代次数过多。
5. 目标函数值变化:
•监测目标函数值的变化情况,如果变化趋于稳定或趋近于最优值,可以考虑停止迭代。
6. 收敛判据:
•使用一些收敛判据,例如KKT条件(Karush-Kuhn-Tucker条件),来判断当前解是否满足最优解的必要条件。
如果满足这些条件,可以认为算法接近最优解。
在实际应用中,停机准则的选择取决于具体的问题和算法实现。
通常,需要综合考虑算法的数值稳定性、计算效率以及问题本身的特点来确定停机准则。
增广拉格朗日乘子法是一类强大的优化方法,停机准则的选择对算法的性能和收敛速度有重要影响。
最优控制问题的对偶方法

最优控制问题的对偶方法最优控制问题是研究如何设计控制策略使得系统在给定约束条件下实现最优性能的一门学科。
对于复杂的控制问题,常常采用对偶方法来求解。
对偶方法以约束条件对应的拉格朗日乘子为基础,通过求解对偶问题来得到原问题的最优解。
本文将详细介绍最优控制问题的对偶方法。
一、最优控制问题基本概念最优控制问题是研究如何选择控制变量和系统参数,以使得系统在某种性能指标下达到最优的问题。
最优性能可以通过最小化或最大化某个性能指标来度量,例如最小化系统能量消耗或最大化系统输出效果。
二、拉格朗日乘子法拉格朗日乘子法是一种解决约束优化问题的方法,对于最优控制问题同样适用。
拉格朗日乘子法通过引入拉格朗日乘子,将带约束的最优化问题转化为无约束的最优化问题,然后通过求解对偶问题来得到最优解。
三、最优控制问题的对偶方法最优控制问题的对偶方法是基于拉格朗日乘子法的。
首先,将原问题的约束条件引入拉格朗日函数,并引入拉格朗日乘子。
然后,通过最小化或最大化拉格朗日函数来得到对偶问题。
最后,通过求解对偶问题来得到原始问题的最优解。
四、对偶问题的求解对偶问题往往是原始问题的凸优化问题,可以通过凸优化的方法进行求解。
最常用的方法是KKT条件,它是判断凸优化问题最优解的必要条件。
KKT条件包括原问题的约束条件、对偶问题的不等式约束、变量非负约束以及拉格朗日乘子的非负性等。
通过求解KKT条件可以得到对偶问题的最优解,从而得到原问题的最优解。
五、最优控制问题的应用最优控制问题的对偶方法在众多领域有着广泛的应用。
例如,在工程控制中,对偶方法可以用于设计最优的控制策略,减少系统的能量消耗。
在经济学中,对偶方法可以用于优化资源分配,提高经济效益。
在交通控制中,对偶方法可以用于优化交通流量,减少交通拥堵。
六、最优控制问题的挑战与展望尽管最优控制问题的对偶方法在实际应用中取得了很多成果,但仍然存在一些挑战。
首先,由于最优控制问题往往是非凸的,求解过程中容易陷入局部最优。
非线性优化与约束优化问题的求解方法
非线性优化与约束优化问题的求解方法非线性优化问题是在目标函数和约束条件中包含非线性项的优化问题。
约束优化问题是在目标函数中加入了一些约束条件的优化问题。
解决这些问题在实际应用中具有重要意义,因此研究非线性优化和约束优化问题的求解方法具有重要的理论和实际意义。
一、非线性优化问题的求解方法非线性优化问题的求解方法有很多,下面介绍几种常见的方法:1. 黄金分割法:黄金分割法是一种简单但有效的搜索方法,它通过不断缩小搜索范围来逼近最优解。
该方法适用于目标函数单峰且连续的情况。
2. 牛顿法:牛顿法利用目标函数的一阶和二阶导数信息来逼近最优解。
该方法收敛速度较快,但在计算高阶导数或者初始点选取不当时可能产生不稳定的结果。
3. 拟牛顿法:拟牛顿法是对牛顿法的改进,它通过逼近目标函数的Hessian矩阵来加快收敛速度。
拟牛顿法可以通过不同的更新策略来选择Broyden-Fletcher-Goldfarb-Shanno(BFGS)方法或者DFP方法。
4. 全局优化方法:全局优化方法适用于非凸优化问题,它通过遍历搜索空间来寻找全局最优解。
全局优化方法包括遗传算法、粒子群优化等。
二、约束优化问题的求解方法约束优化问题的求解方法也有很多,下面介绍几种常见的方法:1. 等式约束问题的拉格朗日乘子法:等式约束问题可以通过引入拉格朗日乘子来转化为无约束优化问题。
通过求解无约束优化问题的驻点,求得原始约束优化问题的解。
2. 不等式约束问题的罚函数法:不等式约束问题可以通过引入罚函数来转化为无约束优化问题。
罚函数法通过将违反约束条件的点处添加罚项,将约束优化问题转化为无约束问题。
3. 逐次二次规划法:逐次二次规划法是一种常用的求解约束优化问题的方法。
该方法通过依次处理逐个约束来逼近最优解,每次处理都会得到一个更小的问题,直至满足所有约束条件。
4. 内点法:内点法是一种有效的求解约束优化问题的方法。
该方法通过向可行域内部逼近,在整个迭代过程中都保持在可行域内部,从而避免了外点法需要不断向可行域逼近的过程。
拉格朗日乘子法及其应用

拉格朗日乘子法及其应用作为一种数学方法,拉格朗日乘子法被广泛应用于各个领域,涵盖了经济学、力学、物理学等诸多学科。
在此,我们将从概念、原理、公式、应用等多个角度来更加深入地探讨拉格朗日乘子法。
一、概念拉格朗日乘子法是一种在多元函数求取条件极值时的工具。
其核心思想是将约束条件引入目标函数,以此转化为无约束函数的求导问题。
即:在一个函数的最大值或最小值的基础上,加上一个约束条件,找到此时的极值。
通常情况下,这个约束条件是一个等式或不等式。
二、原理对于由n个自变量和m个约束条件所构成的函数,设其为f(x1,x2,...,xn),约束条件为g1(x1,x2,...,xn)=0,g2(x1,x2,...,xn)=0,…,gm(x1,x2,...,xn)=0。
则目标是,找出该函数在给定约束条件下,最大值或最小值的情况。
具体求解方法为,首先将其中的一个约束条件用拉格朗日乘子λ表示出来,即g1(x1,x2,...,xn)-λ=0,然后与f(x1,x2,...,xn)组合成一个新的函数F(x,λ)=f(x1,x2,...,xn)-λg1(x1,x2,...,xn),变成只涉及自变量的函数,求出其偏导数并令它们等于0,求解出所有的自变量和拉格朗日乘子λ的取值,然后代回原方程组中,即可得到函数最大值或最小值及约束条件下的最大值或最小值。
三、公式对于一个由F(x1,x2,…,xn)表示的多元函数,设其中的k个自变量为xk(k=1,2,…,k),m个拉格朗日乘子为λ1,λ2,…,λm,则拉格朗日函数为:L(x,λ)=F(x1,x2,…,xn)+λ1g1(x1,x2,…,xn)+λ2g2(x1,x2,…,xn)+…+λmgm(x1,x2,…,xn)则求F(x1,x2,…,xn)在g1(x1,x2,…,xn)=0,g2(x1,x2,…,xn)=0,…,gm(x1,x2,…,xn)=0条件下的极值,就等于求L(x,λ)在x1,x2,…,xn和λ1,λ2,…,λm条件下的极值。
拉格朗日乘子法例题
拉格朗日乘数法主要用于解决约束优化问题。
以下是具体示例:
求函数f(x,y)=x^2*y的极值,同时满足约束条件g(x,y)=x^2+y^2-1=0。
首先,根据拉格朗日乘数法,引入拉格朗日乘子λ,构造拉格朗日函数
L(x,y,λ)=f(x,y)+λg(x,y)。
将f(x,y)和g(x,y)代入L(x,y,λ),得到L(x,y,λ)=x^2*y+λ(x^2+y^2-1)。
接着,对L(x,y,λ)求偏导,得到以下三个方程:
1.∂L/∂x=2xy+2λx=0
2.∂L/∂y=x^2+2λy=0
3.∂L/∂λ=x^2+y^2-1=0
由第一个和第二个方程可以得到x(y+λ)=0和y(x-λ)=0,进而解得三组可能的解:
(0,-1),(√2/2,√2/2),(-√2/2,-√2/2)。
然后,将这三组解代入原函数f(x,y),计算得到对应的函数值。
通过比较这些函数值,可以确定f(x,y)在约束条件g(x,y)=0下的极值。
以上便是使用拉格朗日乘数法解决约束优化问题的一个例子。
这种方法在经济学、最优化等领域有着广泛的应用。
最优化理论与算法习题答案
最优化理论与算法习题答案最优化理论与算法习题答案最优化理论与算法是应用数学中的一个重要分支,它研究如何在给定的约束条件下,找到一个使目标函数取得最优值的解。
在实际应用中,最优化问题广泛存在于各个领域,如经济学、管理学、物理学等。
本文将回答一些与最优化理论与算法相关的习题,帮助读者更好地理解和应用这一领域的知识。
1. 什么是最优化问题?最优化问题是指在给定的约束条件下,寻找一个使目标函数取得最优值的解。
其中,目标函数是需要最大化或最小化的函数,约束条件是对解的限制条件。
最优化问题可以分为无约束最优化和有约束最优化两种情况。
2. 什么是凸优化问题?凸优化问题是指目标函数和约束条件均为凸函数的最优化问题。
凸函数具有良好的性质,例如局部最小值即为全局最小值,因此凸优化问题的求解相对容易。
常见的凸优化问题有线性规划、二次规划等。
3. 什么是拉格朗日乘子法?拉格朗日乘子法是一种求解有约束最优化问题的方法。
它通过引入拉格朗日乘子,将有约束最优化问题转化为无约束最优化问题。
具体地,对于一个有约束最优化问题,我们可以构造拉格朗日函数,然后通过求解无约束最优化问题来获得原问题的解。
4. 什么是线性规划?线性规划是一种特殊的最优化问题,其中目标函数和约束条件均为线性函数。
线性规划在实际应用中非常广泛,例如在生产计划、资源分配等方面都有重要的应用。
线性规划可以使用单纯形法等算法进行求解。
5. 什么是整数规划?整数规划是一种最优化问题,其中变量需要取整数值。
与线性规划相比,整数规划的求解更加困难,因为整数约束条件使得问题的解空间变得离散。
常见的整数规划问题有旅行商问题、装箱问题等。
6. 什么是非线性规划?非线性规划是一种最优化问题,其中目标函数或约束条件为非线性函数。
非线性规划的求解相对复杂,通常需要使用迭代算法进行求解,例如牛顿法、拟牛顿法等。
非线性规划在实际应用中非常广泛,例如在经济学、工程学等领域都有重要的应用。
7. 什么是梯度下降法?梯度下降法是一种常用的优化算法,用于求解无约束最优化问题。
约束最优化方法

约束最优化方法
约束最优化方法是指通过给定约束条件,寻找目标函数的最优解。
以下是一些常用的约束最优化方法:
1. 拉格朗日乘子法:将约束最优化问题转化为无约束最优化问题,通过求解无约束最优化问题得到原问题的最优解。
2. 罚函数法:将约束条件转化为罚函数项,通过不断增加罚函数的权重,使目标函数逐渐逼近最优解。
3. 梯度下降法:通过迭代计算目标函数的梯度,沿着梯度的负方向搜索目标函数的最优解。
4. 牛顿法:通过迭代计算目标函数的Hessian矩阵,使用Hessian矩阵的逆矩阵乘以梯度向量来逼近最优解。
5. 遗传算法:模拟自然界的遗传机制,通过种群迭代的方式搜索最优解。
6. 模拟退火算法:模拟物理退火过程,通过随机搜索的方式搜索最优解。
7. 蚁群算法:模拟蚂蚁觅食行为,通过模拟蚂蚁的信息素传递过程来搜索最优解。
8. 粒子群算法:模拟鸟群、鱼群等群集行为,通过模拟粒子间的相互作用来搜索最优解。
这些方法各有优缺点,应根据具体问题选择合适的方法进行求解。
现代设计理论之可靠性分配方法简介
可靠性分配方法(一)等分配法(无约束分配法)等分配法(Equal Apportionment Technique )是对全部的单元分配以相同的可靠度的方法。
按照系统结构和复杂程度,可分为串联系统可靠度分配、并联系统可靠度分配、串并联系统可靠度分配等。
(1)串联系统可靠度分配当系统中n 个单元具有近似的复杂程度、重要性以及制造成本时,则可用等分配法分配系统各单元的可靠度。
这种分配法的另一出发点考虑到串联系统的可靠性往往取决于系统中最弱的单元。
当系统的可靠度为s R ,而各分配单元的可靠度为i R 时因此单元的可靠度i R 为(2)并联系统可靠度分配当系统的可靠度指标要求很高(例如Rs>0.99)而选用已有的单元又不能满足要求时,则可选用n 个相同单元的并联系统,这时单元的可靠度远远大于系统的可靠度。
当系统的可靠度为s R ,而各分配单元的可靠度为i R因此单元的可靠度i R 为(3)串并联系统可靠度分配先将串并联系统化简为“等效串联系统”和“等效单元”,再给同级等效单元分配以相同的可靠度。
优缺点:等分配法适用于方案论证与方案设计阶段,主要优点是计算简单,应用方便。
主要缺点是未考虑各分系统的实际差别。
(二)按相对失效率和相对失效概率分配(无约束分配法)相对失效率法和相对失效概率法统称为“比例分配法”。
相对失效率法是使系统中各单元容许失效率正比于该单元的预计失效率值,并根据这一原则来分配系统中各单元的可靠度。
此法适用于失效率为常数的串联系统。
对于冗余系统,可将他们化简为串联系统候再按此法进行。
相对失效概率法是根据使系统中各单nini i s R R R ==∏=11/ 1,2,,ni s R R i n==()11ns i R R =--()1/11,1,2,,ni s R R i n=--=()元的容许失效概率正比于该单元的预计失效概率的原则来分配系统中各单元的可靠度。
重要度是指用一个定量的指标来表示各设备的故障对系统故障的影响,按重要度考虑的分配方法的实质即是:某个设备的平均故障间隔时间(可靠性指标)应该与该设备的重要度成正比。
约束优化算法拉格朗日乘子法

约束优化算法拉格朗日乘子法拉格朗日乘子法是一种用于求解约束优化问题的数学方法。
该方法通过引入拉格朗日乘子,将原始问题转化为一个无约束问题,从而简化了求解过程。
本文将详细介绍拉格朗日乘子法的基本原理和求解步骤。
一、基本原理拉格朗日乘子法的基本思想是将原始问题的约束条件转化为目标函数的一部分,以此来将原始问题转化为无约束问题。
假设有一个原始优化问题如下:minimize f(x)subject to g(x) = 0,其中f(x)为目标函数,x为决策变量,g(x)为约束条件。
首先,定义拉格朗日函数L(x,λ)如下:L(x,λ)=f(x)+λg(x),然后,使用拉格朗日函数L(x,λ)来求解问题,即最小化拉格朗日函数:minimize L(x, λ) = f(x) + λg(x)将约束条件转化为拉格朗日函数的一部分后,原始约束问题就转化为了一个无约束问题。
原始问题的最优解必须满足原始目标函数和原始约束条件的两个必要条件:拉格朗日函数的一阶偏导数为零和约束条件等于零。
二、求解步骤使用拉格朗日乘子法求解约束优化问题的一般步骤如下:1.建立拉格朗日函数:根据原始问题的目标函数和约束条件,建立拉格朗日函数。
拉格朗日函数的形式为L(x,λ)=f(x)+λg(x)。
2.求取拉格朗日函数的偏导数:分别对决策变量x和拉格朗日乘子λ求取偏导数。
即计算∂L/∂x和∂L/∂λ。
3.令偏导数为零:将∂L/∂x和∂L/∂λ分别设置为零,得到关于x和λ的方程组。
解这个方程组可以得到最优解的估计。
4.求解约束条件:将x和λ带入原始约束条件g(x)=0中,求解约束条件得到λ的值。
5.检验最优解:将最优解带入原始目标函数f(x)中,检验是否满足最小化约束条件的目标。
三、实例分析为了更好理解拉格朗日乘子法的应用,我们通过一个实例来说明具体求解步骤。
假设有一个约束优化问题如下:minimize f(x) = x^2 + y^2subject to g(x, y) = x + y - 1 = 0通过拉格朗日乘子法求解该问题的具体步骤如下:1.建立拉格朗日函数:L(x,y,λ)=x^2+y^2+λ(x+y-1)2.求取拉格朗日函数的偏导数:∂L/∂x=2x+λ∂L/∂y=2y+λ∂L/∂λ=x+y-13.令偏导数为零:将上述偏导数分别设置为零,得到方程组:2x+λ=02y+λ=0x+y-1=0通过解这个方程组,我们可以得到关于x、y和λ的值,即最优解的估计。
带有约束条件的目标函数求解
带有约束条件的目标函数求解
求解带有约束条件的目标函数可以使用拉格朗日乘子法,也称拉格朗日对偶方法。
该方法是一种数学优化方法,用于求解约束最优化问题,它将原始问题转化为拉格朗日函数的极值问题,然后再使用拉格朗日乘子法求解。
拉格朗日乘子法的基本步骤如下:
1.将原始问题转化为拉格朗日函数的极值问题;
2.计算拉格朗日函数的偏导数,并将其等于零;
3.根据拉格朗日乘子法的极值条件,求解拉格朗日乘子;
4.根据拉格朗日函数的极值条件,求解拉格朗日函数的极值;
5.根据拉格朗日乘子的极值,求解原始问题的最优解。
最优化方法:拉格朗日乘数法

最优化⽅法:拉格朗⽇乘数法解决约束优化问题——拉格朗⽇乘数法拉格朗⽇乘数法(Lagrange Multiplier Method)应⽤⼴泛,可以学习⿇省理⼯学院的在线数学课程。
拉格朗⽇乘数法的基本思想 作为⼀种优化算法,拉格朗⽇乘⼦法主要⽤于解决约束优化问题,它的基本思想就是通过引⼊拉格朗⽇乘⼦来将含有n个变量和k个约束条件的约束优化问题转化为含有(n+k)个变量的⽆约束优化问题。
拉格朗⽇乘⼦背后的数学意义是其为约束⽅程梯度线性组合中每个向量的系数。
如何将⼀个含有n个变量和k个约束条件的约束优化问题转化为含有(n+k)个变量的⽆约束优化问题?拉格朗⽇乘数法从数学意义⼊⼿,通过引⼊拉格朗⽇乘⼦建⽴极值条件,对n个变量分别求偏导对应了n个⽅程,然后加上k个约束条件(对应k个拉格朗⽇乘⼦)⼀起构成包含了(n+k)变量的(n+k)个⽅程的⽅程组问题,这样就能根据求⽅程组的⽅法对其进⾏求解。
解决的问题模型为约束优化问题: min/max a function f(x,y,z), where x,y,z are not independent and g(x,y,z)=0. 即:min/max f(x,y,z) s.t. g(x,y,z)=0数学实例 ⾸先,我们先以⿇省理⼯学院数学课程的⼀个实例来作为介绍拉格朗⽇乘数法的引⼦。
【⿇省理⼯学院数学课程实例】求双曲线xy=3上离远点最近的点。
解: ⾸先,我们根据问题的描述来提炼出问题对应的数学模型,即: min f(x,y)=x2+y2(两点之间的欧⽒距离应该还要进⾏开⽅,但是这并不影响最终的结果,所以进⾏了简化,去掉了平⽅) s.t. xy=3. 根据上式我们可以知道这是⼀个典型的约束优化问题,其实我们在解这个问题时最简单的解法就是通过约束条件将其中的⼀个变量⽤另外⼀个变量进⾏替换,然后代⼊优化的函数就可以求出极值。
我们在这⾥为了引出拉格朗⽇乘数法,所以我们采⽤拉格朗⽇乘数法的思想进⾏求解。
拉格朗日乘子法和约束优化问题的研究

拉格朗日乘子法和约束优化问题的研究拉格朗日乘子法和约束优化问题是数学领域中的重要研究方向,旨在解决包含约束条件的最优化问题。
本文将就拉格朗日乘子法的基本原理、应用领域以及优缺点进行探讨,并介绍约束优化问题的研究现状。
一、拉格朗日乘子法的基本原理拉格朗日乘子法是一种求解约束优化问题的常用方法。
其基本思想是将带约束条件的最优化问题转化为等价的无约束优化问题,通过引入拉格朗日乘子来实现。
具体而言,若原问题为最小化函数f(x)的条件下,满足约束条件g(x)=0的问题:min f(x) s.t. g(x)=0则可以引入拉格朗日函数L(x,λ):L(x,λ) = f(x) - λg(x)其中,λ为拉格朗日乘子。
通过求解该拉格朗日函数的驻点,即求解其偏导数L'(x,λ) = 0,可得到满足约束条件的极值点。
二、拉格朗日乘子法的应用领域拉格朗日乘子法广泛应用于各个领域,如物理学、经济学和工程学等。
以下列举几个典型的应用领域:1. 等式约束问题当需要解决满足等式约束条件的最优化问题时,可以通过拉格朗日乘子法将其转化为无约束问题进行求解。
例如,工程中的优化设计问题通常存在各种限制条件,通过拉格朗日乘子法可以有效求解最优方案。
2. 不等式约束问题对于满足不等式约束条件的最优化问题,可以通过引入松弛变量将其转化为等式约束问题,再应用拉格朗日乘子法进行求解。
这种方法在经济学领域、机器学习以及现代控制理论中有广泛应用。
3. 线性规划问题在线性规划问题中,拉格朗日乘子法可用于求解约束条件为线性等式或线性不等式的情况。
其应用范围包括生产优化、资源分配以及运输问题等。
三、拉格朗日乘子法的优缺点拉格朗日乘子法作为一种常用的约束优化方法,具有以下几个优点:1. 引入拉格朗日乘子后,将带约束的优化问题转化为无约束问题,简化了求解过程。
2. 可以通过求解拉格朗日函数的驻点,得到满足约束条件的最优解。
3. 适用范围广泛,可用于各种约束条件的优化问题。
拉格朗日约束条件求最值

拉格朗日约束条件求最值
拉格朗日约束条件是一种优化问题求解的方法,用于在给定一组约束条件下求解某个函数的最值。
拉格朗日乘子法是拉格朗日约束条件的一种常用方法。
假设有一个优化问题,要求函数 f(x) 的最大值或最小值,在给定一组约束条件 g(x) = 0 的情况下,可以通过拉格朗日乘子法来求解。
首先,构造拉格朗日函数L(x, λ) = f(x) + λ * g(x),其中λ 是称为拉格朗日乘子的参数。
然后,求解拉格朗日函数对 x 和λ 的偏导数,令它们等于零:
1. 求解∂L/∂x = 0,得到 x 的解;
2. 求解∂L/∂λ = 0,得到λ 的解。
最后,将得到的 x 和λ 的解代入原函数 f(x) 中,得到最优解。
具体是求最大值还是最小值,取决于问题本身的要求。
需要注意的是,拉格朗日乘子法适用于满足约束条件可微的问题,在非线性、非凸问题中应用较多。
但需要确保问题的约束条件满足松弛可行性,即约束条件不等式满足弱不等式形式。
总之,拉格朗日约束条件的求解是通过构造拉格朗日函数,求解其偏导数,得到最优解的一种方法。
拉格朗日乘数法解含不等式约束的最优化问题
拉格朗⽇乘数法解含不等式约束的最优化问题
拉格朗⽇乘数法解含不等式约束的最优化问题
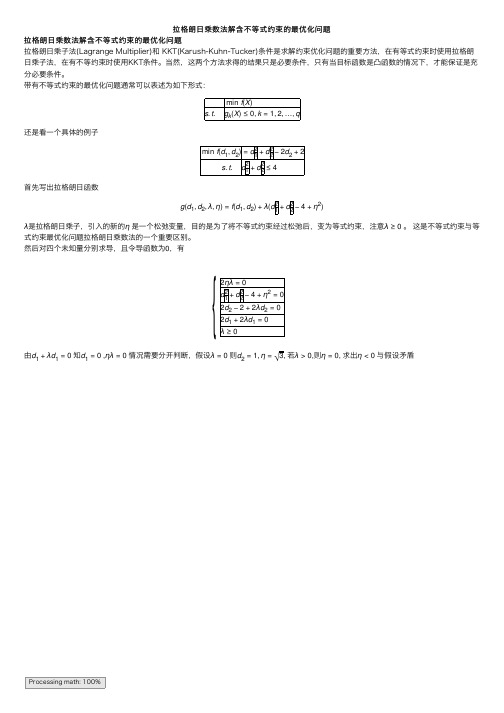
拉格朗⽇乘⼦法(Lagrange Multiplier)和 KKT(Karush-Kuhn-Tucker)条件是求解约束优化问题的重要⽅法,在有等式约束时使⽤拉格朗⽇乘⼦法,在有不等约束时使⽤KKT条件。
当然,这两个⽅法求得的结果只是必要条件,只有当⽬标函数是凸函数的情况下,才能保证是充分必要条件。
带有不等式约束的最优化问题通常可以表述为如下形式:
min f(X)
s.t.g k(X)≤0,k=1,2,…,q
还是看⼀个具体的例⼦
min f(d1,d2)=d21+d22−2d2+2
s.t.d21+d22≤4
⾸先写出拉格朗⽇函数
g(d1,d2,λ,η)=f(d1,d2)+λ(d21+d22−4+η2)
λ是拉格朗⽇乘⼦,引⼊的新的η是⼀个松弛变量,⽬的是为了将不等式约束经过松弛后,变为等式约束,注意λ≥0 。
这是不等式约束与等式约束最优化问题拉格朗⽇乘数法的⼀个重要区别。
然后对四个未知量分别求导,且令导函数为0,有
{
2ηλ=0
d21+d22−4+η2=0
2d2−2+2λd2=0
2d1+2λd1=0
λ≥0
由d1+λd1=0 知d1=0 ,ηλ=0 情况需要分开判断,假设λ=0 则d2=1,η=√3, 若λ>0,则η=0, 求出η<0 与假设⽭盾
Processing math: 100%。
扩展拉格朗日乘子优化方法kkt条件

扩展拉格朗日乘子优化方法及其KKT条件1. 引言拉格朗日乘子法是一种常用的优化方法,用于求解约束条件下的最优化问题。
它通过引入拉格朗日乘子,将约束条件转化为目标函数中的等式约束,从而将原问题转化为无约束的优化问题。
然而,传统的拉格朗日乘子法只适用于等式约束和不等式约束均为线性的情况。
为了解决这个限制,扩展拉格朗日乘子法被提出。
扩展拉格朗日乘子法是对传统拉格朗日乘子法的一种拓展和推广。
它能够处理更一般的非线性约束条件,并且可以用于求解凸优化问题。
本文将介绍扩展拉格朗日乘子法及其KKT条件。
2. 扩展拉格朗日乘子法2.1 基本思想扩展拉格朗日乘子法通过引入辅助变量和松弛变量,将原始问题转化为一个无约束的优化问题。
具体来说,对于一个带有等式和不等式约束条件的最优化问题:min x f(x)s.t. g i(x)=0, i=1,2,...,mℎj(x)≤0, j=1,2,...,n其中,f(x)是目标函数,g i(x)和ℎj(x)分别是等式约束和不等式约束。
扩展拉格朗日乘子法的基本思想是引入拉格朗日乘子λi和松弛变量s j,将原始问题转化为以下无约束的优化问题:min x,λ,s L(x,λ,s)=f(x)+∑λimi=1g i(x)+∑s jnj=1ℎj(x)其中,λi和s j分别是对应于等式约束和不等式约束的拉格朗日乘子和松弛变量。
2.2 求解步骤扩展拉格朗日乘子法的求解步骤如下:步骤一:构造拉格朗日函数L(x,λ,s)=f(x)+∑λimi=1g i(x)+∑s jnj=1ℎj(x)步骤二:求解无约束优化问题min x,λ,s L (x,λ,s ) 步骤三: 判断最优解的可行性通过判断等式约束和不等式约束的满足程度,来确定最优解的可行性。
具体来说,对于等式约束g i (x )=0,需要满足λi g i (x )=0;对于不等式约束ℎj (x )≤0,需要满足s j ℎj (x )=0。
步骤四: 求解原始问题根据最优解的可行性来求解原始问题。
增广拉格朗日乘子法及其在约束优化问题的应用

毕业论文题目增广拉格朗日乘数法及在其在约束优化问题的应用学院数学科学学院专业信息与计算科学班级计算1001班学生高亚茹学号20100921032指导教师邢顺来二〇一四年五月二十五日摘要增广拉格朗日乘子法作为求解约束优化问题的一种重要方法,近年来研究增广拉格朗日乘子法的应用显得更加重要。
本文首要介绍了增广拉格朗日乘子法的产生,通过解释增广拉格朗日乘子法是罚函数法和拉格朗日乘子法的有机结合,引出了现在对增广拉格朗日法的发展状况,概述了增广拉格朗日乘子法基本理论。
然后具体说明了增广拉格朗日法在科学领域上的实际应用,如在供水系统和图像复原的应用,也证明了增广拉格朗日乘子法的实际应用性。
关键词:增广拉格朗日乘子法;罚函数法;供水系统;图像复原ABSTRACTAugmented lagrange multiplier methods as an important method for solving constrained optimization problems, recent studies in applications of augmented lagrange multiplier methods is even more important. This paper describes the generation of primary augmented lagrange multiplier method. By interpreting the augmented lagrangian multiplier methods is the combination of penalty function methods and Lagrange multiplier methods, It is given to a recent development of augmented lagrangian methods. Then is shown the basic theories of augmented lagrangian multiplier methods. Finally it is specified the augmented lagrangian method on the practical applications of scientific fields, such as water supply ystems and image restorations, also proved augmented lagrangian multiplier methods of practical application.Key words:Augmented Lagrange Multiplier Methods;Penalty Function Methods Water Supply Systems ;Image Restorations目录摘要 (I)ABSTRACT (II)1前言 (1)1.1增广拉格朗日函数法的产生与应用 (1)1.2研究增广拉格朗日函数法应用的意义 (1)2增广拉格朗日乘子法 (3)2.1约束非线性规划 (3)2.2罚函数外点法 (4)2.3拉格朗日乘子法....................................... (6)2.4增广拉格朗日乘子法.............................. (7)2.4增广拉格朗日乘子法的计算........................... (10)3 增广拉格朗日乘子法的应用................................................. ...... (12)3.1供水系统调度的增广拉格朗日函数优化方法.......................... . (12)3.2图像复原的增广拉格朗日函数优化方法 (14)结论 (17)参考文献 (18)致谢 (19)1前言1.1 增广拉格朗日函数法的产生与应用在求解有约束条件的优化题目时,有一个重要方法,便是用适合的方法把约束优化问题,转变成无约束优化问题来进行求解。
拉格朗日函数求解路径最优

拉格朗日函数求解路径最优拉格朗日函数是一种数学技术,用于求解具有约束条件的最优化问题。
在路径优化问题中,它可用于求解最优路径,同时满足约束条件。
步骤:1.构造拉格朗日函数拉格朗日函数是目标函数和约束条件的线性组合,其中约束条件乘以拉格朗日乘子:L(x, \lambda) = f(x) + \sum_{i=1}^m \lambda_i g_i(x)其中:–f(x)是目标函数–g_i(x)是约束条件–\lambda_i是拉格朗日乘子2.求偏导数求拉格朗日函数相对于所有决策变量x和拉格朗日乘子\lambda的偏导数,并将它们设为零:\frac{\partial L}{\partial x} = 0\frac{\partial L}{\partial \lambda_i} = 03.求解方程组求解由偏导数方程组形成的方程组,得到最优解x^*和对应的拉格朗日乘子\lambda^*。
4.验证可行性检查最优解是否满足所有约束条件。
如果满足,则它是路径优化问题的可行解。
注意:•拉格朗日函数法只保证局部最优解。
•拉格朗日乘子表示约束条件的相对重要性。
•在某些情况下,可能存在多个最优解。
示例:考虑一个路径优化问题,目标是找出从点A到点B的最短路径,同时满足约束条件:路径不能穿过障碍物C。
拉格朗日函数:L(x, \lambda) = d(A, B) + \lambda d(x, C)其中: * d(A, B)是从点A到点B的距离 * d(x, C)是从路径点x到障碍物C的距离 * \lambda是拉格朗日乘子偏导数:\frac{\partial L}{\partial x} = \frac{\partial d(A, B)}{\partial x} + \ lambda \frac{\partial d(x, C)}{\partial x} = 0\frac{\partial L}{\partial \lambda} = d(x, C) = 0求解方程组:方程组的解为:•x^*是路径上不穿过障碍物C的任意一点•\lambda^* = \frac{d(A, B)}{d(x^*, C)}验证可行性:由于x^*不穿过障碍物C,并且d(x^*, C) ≠ 0,因此最优解满足约束条件,它是可行解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、 编程实现以下科学计算算法,并举一例应用之。
“拉格朗日乘子法约束最优化”
拉格朗日乘子法求约束最优化问题实例。
采用拉格朗日乘子法如下最优化问题:
)(),(min 212121x x x x x l +++=λλ。
在MA TLAB 中编写函数ex1208.m 来进行求解,具体代码如下所示。
%%%ex1208.m 拉格朗日乘子法求最优化解
x=zeros(1,2) %用syms 表示出转化后的无约束函数 syms x y lama
f=x+y+lama*(x^2+y^2-2); %分别求函数关于x 、y 、lama 的偏导 dx=diff(f,x); dy=diff(f,y);
dlama=diff(f,lama); %令偏导为零,求解x 、y xx=solve(dx,x); %将x 表示为lama 函数 yy=solve(dy,y); %将y 表示为lama 函数
ff=subs(dlama,{x,y},{xx,yy}); %代入dlama 得关于lama 的一元函数 lamao=solve(ff); %求解得lama0 xo=subs(xx,lama,lamao) %求得取极值处的x0 yo=subs(yy,lama,lamao) %取极值处的y0 fo=subs(f,{x,y,lama},{xo,yo,lamao}) %取极值处的函数值 程序运行结果为: xo= 1 -1 yo= 1 -1 fo= 2 -2 流程图:
二、编程解决以下科学计算和工程实际问题。
、
1、利用MA TLAB提供的randn函数声称符合正态分布的10 5随机矩阵A, 进行如下操作:
(1)A各列元素的均值和标准方差。
(2)A的最大元素和最小元素。
(3)求A每行元素的和以及全部元素之和。
(4)分别对A的每列元素按升序、每行元素按降序排序。
代码:
clear all;close all; clc;
A=randn(10,5);
meanA=mean(A); %(1)A各列元素的均值
stdA=std(A); %(1)A各列元素的标准方差
maxA=max(max(A)); %(2)A的最大元素
minA=min(min(A)); %(2)A的最小元素
rowsumA=sum(A,2); %(3)A每行元素的和
sumA=sum(rowsumA); %(3)A全部元素的和
sort1=sort(A); %(4)A的每列元素按升序排列
sort2=sort(A,2,’descend’); %(4)A的每列元素按降序排列
运行结果:因生成矩阵随机,故无固定结果
流程图:
2、按要求对指定函数进行插值和拟合。
(1)按表6.4用3次样条方法插值计算0~90度范围内整数点的正弦值和0~75度范围内整数点的正切值,然后用5次多项式拟合方法计算相同的函数值,并将两种计算结果进行比较。
表6.4 特殊角的正弦与正切值表
(2)按表6.5用3次多项式方法插值计算1~100之间的整数的平方根。
表6.5 1~100内特殊值的平方根表
(1)代码:
clear all;close all;clc;
alpha1=0:15:90;
sin_alpha1=sin(alpha1*pi/180);
plot(alpha1,sin_alpha1,'k:p');
alpha2=0:90;
sin_Y1=interp1(alpha1,sin_alpha1, alpha2,'spline');
plot(alpha2,sin_Y1,'r-*');hold on;
P1=polyfit(alpha1,sin_alpha1,5);
sin_Y2=polyval(P1,alpha2);
plot(alpha2,sin_Y2,'b-o');
legend
alpha3=0:15:75;
tan_alpha3=tan(alpha3*pi/180);
figure,plot(alpha3,tan_alpha3,'k:p');hold on; alpha4=0:75;
tan_Y1=interp1(alpha3,tan_alpha3,alpha4,'spline'); plot(alpha4,tan_Y1,'r-*');hold on;
P2=polyfit(alpha3,tan_alpha3,5);
tan_Y2=polyval(P2,alpha4);
plot(alpha4,tan_Y2,'b-o')
legend
运行结果:
正弦值比较
正切值比较
流程图:
(2)代码:
clear all;close all;clc;
X=[1,4,9,16,25,36,49,64,81,100];Y=1:10; X1=1:100;Y1=interp1(X,Y,X1,’cublc’); plot(X,Y,’r:o’);hold on;
plot(X1,Y11’k-x’);
legend
运行结果:
流程图:
3、已知一组实验数据如表6.6所示。
表6.6 一组实验数据
求它的线性拟合曲线
代码:
clear all;close all;clc; x=[165,123,150,123,141]; y=[187,126,172,125,148]; P=polyfit(x,y,3) 运行结果: P=
1.0e+003 *
-0.0000 0.0013 -0.1779 8.4330 所以它的线性拟合曲线为: 84339.1773.1)(2+-=x x x P
其图象为:
流程图:。