瑞萨电子一体式ADAS全景环视解决方案套件详解
瑞萨电子ADAS方案应用

NTSCデコーダ (4 ch) VIN (6 ch) IMR- LSX (4 ch) SD card host I/ F( CPRM無)
RCAN2 ( 2 ch)
peripheral
12
© 2014 Renesas Electronics (China) Co., Ltd. All rights reserved.
Before a correction After a correction
After a correction
After
alpha twice
beta twice
Intensity level (a) The correction methodology of a dark fill area
Intensity level (b) The correction methodology of a bright fill area
Right camera
Left camera
!
Rear camera
10
© 2014 Renesas Electronics (China) Co., Ltd. All rights reserved.
专用图像处理器
32位,533兆的SH4A瑞萨电子的CPU核,针对环视应用的专用芯片 通过4路摄像头视频输入,内置NTSC的ADC视频转换器 硬件引擎有,高性能的IMR图像识别,图形矫正功能 显示输出,DRC的图形处理-白平衡的亮度纠正和补偿
FPU
L1- I$ 32k / L1-D$ 32kB
Vision/Graphics IP subsystem Memory interface SRAM I/F
adas用元器件

ADAS用元器件1. 介绍ADAS(Advanced Driver Assistance Systems)是指先进驾驶辅助系统,通过使用各种传感器、通信和计算设备,以及控制算法来提供驾驶员辅助和安全功能。
ADAS 的使用在现代汽车中越来越普遍,它可以提高驾驶安全性、便利性和舒适度。
ADAS 系统中使用的元器件起着关键的作用,本文将介绍ADAS用元器件的类型、功能和应用。
2. ADAS用元器件的类型ADAS系统中使用的元器件种类繁多,涵盖了多个领域的技术。
下面是一些常见的ADAS用元器件类型:2.1. 摄像头摄像头是ADAS系统中最基本的元器件之一。
它们通常用于实时捕捉车辆周围的图像和视频,并通过计算机视觉算法进行分析和处理。
摄像头可以用于识别道路标志、车辆、行人和其他障碍物,从而提供车辆的位置和环境信息。
2.2. 雷达雷达是一种使用无线电波进行测量和探测的设备。
在ADAS系统中,雷达通常用于检测和跟踪周围的物体,包括车辆、行人和障碍物。
雷达可以提供距离、速度和方向等信息,以帮助车辆进行自动刹车、自适应巡航控制和车道保持等功能。
2.3. 激光雷达激光雷达是一种使用激光束进行测量和跟踪的设备。
它可以提供高精度的距离和位置信息,并广泛应用于ADAS系统中。
激光雷达可以帮助车辆实现自动驾驶、交通拥堵检测和避障等功能。
2.4. 超声波传感器超声波传感器是一种使用超声波进行测量和探测的设备。
它们通常用于测量车辆周围的距离和障碍物的位置。
超声波传感器可以帮助车辆进行自动泊车、盲点检测和前碰撞预警等功能。
2.5. GPS模块GPS模块是一种用于确定车辆位置和导航的设备。
它可以接收卫星信号,并计算车辆的经纬度坐标。
GPS模块在ADAS系统中广泛应用于导航、路径规划和定位等功能。
2.6. 控制单元控制单元是ADAS系统中的核心设备,用于接收和处理传感器、摄像头和雷达等元器件提供的数据。
控制单元通常包括处理器、存储器和算法,用于实现各种驾驶辅助和安全功能。
高级驾驶辅助系统ADAS各功能详解
A D A S(高级驾驶辅助系统)高级驾驶辅助系统(Advanced Driver Assistant System),简称ADAS,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。
ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。
对于最新的ADAS 技术来说,主动式干预也很常见。
ADAS通常包括以下17种用与汽车驾驶辅助的系统:1、导航:导航是一个研究领域,重点是监测和控制工艺或车辆从一个地方移动到另一个地方的过程。
导航领域包括四个一般类别:陆地导航,海洋导航,航空导航和空间导航。
2、时交通系统TMC:TMC是是欧洲的辅助GPS导航的功能系统。
它是通过RDS方式发送实时交通信息和天气状况的一种开放式数据应用。
借助于具有TMC功能的导航系统,数据信息可以被接收并解码,然后以用户语言或可视化的方式将和当前旅行路线相关的信息展现给驾驶者。
3、电子警察系统ISA:我国道路交通管理系统中的“电子警察”是随着科技的发展而产生的,是一个时代的产物。
它作为现代道路交通安全管理的有效手段,可以迅速地监控、抓拍、处理交通违章事件,迅速地获取违章证据,提供行之有效的监测手段,为改善城市交通拥堵现象起到了重要的作用,已成为道路交通管理队伍中必不可少的一员,以充分发挥它准确、公正的执法作用。
4、车联网(Internet of Vehicles):车联网是由车辆位置、速度和路线等信息构成的巨大交互网络。
通过GPS、RFID、传感器、摄像头图像处理等装置,车辆可以完成自身环境和状态信息的采集;通过互联网技术,所有的车辆可以将自身的各种信息传输汇聚到中央处理器;通过计算机技术,这些大量车辆的信息可以被分析和处理,从而计算出不同车辆的最佳路线、及时汇报路况和安排信号灯周期5、自适应巡航ACC(Adaptivecruise control):自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。
ADAS核心设计攻略

77 GHz 雷达系统参考设计
Everything For Engineers
简介 车用视觉控制系统处理来自数码摄像机、激光器、雷达和其它感应器等来源的数据信息,以便执行诸如 路线起程提示、瞌睡感应或停车辅助之类的任务。处理过的信息会显示在显示屏上或通过声音警告信号广播 出来。 设计框图:
电源管理:电源与 12V 或 24V 的网板相连接,上/下调节电压以适用于 DSP、uC、存储器和 IC 及其它 功能, 例如步进电机、通信接口、显示偏差和背景。当尝试小型、低成本且高效的设计时,由于需要多个不 同的电源轨,因此电源设计就成了一项关键任务。具有低静态电 流的线性稳压器有助于在待机操作模式(关 闭点火)过程中减少电池漏电流,是与电池直连的器件的负载突降电压容限,需要低压降并追踪低电池曲轴 操作。
18 MR2001 多通道 77 GHz 雷达收发器芯片组
19 高级驾驶员辅助系统(ADAS)视觉解决方案
20 ADSP-BF606 BLACKFIN 双核处理器,适合高性能数字信号处理应用
21 ADV7280 10 位、4 倍过采样 SDTV 视频解码器
22 ADV7125: 330MHz、三通道、8 位高速视频 DAC
72 护航驾驶更可靠,基于视觉的 ADAS 有望率先普及
74 ADAS 技术革新,不再受汽车驾驶安全问题困扰
3
一周回顾系列白皮书之 <高级驾驶辅助系统 ADAS 核心设计攻略>
Everything For Engineers
TI
高级驾驶员辅助系统(ADAS)设计
Everything For Engineers
1
一周回顾系列白皮书之 <高级驾驶辅助系统 ADAS 核心设计攻略>
Synopsys为TSMC 22nm ULP/ULL工艺提供DesignWare基础IP
器 (HDD)提 供 服 务 的 细 分 市 场 ,可 提 供 高 出 三 层 连 接 和 USB 3.0连接 ,拓 展 了 VIP接 口可选 方 案 ,
单元 (TLC)NAND 33%的位密度 。新型 QLC固态硬 让 嵌 入 式 视觉 系 统 的原 型 开发 更 为简 便 。(来 自莱 盘可以满足人工智能 、大数据 、商业智能 、内容传输 迪 思 )
HAPS一80的远程 访 问 功能 ,也 使 得 寒武 纪 软 件人 员
能够 持续 进行 不 问断 软件 测试 。HAPS一80兼 具 出色
Mentor强化 支持 TSMC 5nm F i nFET 和 7nm F i nFET P I US工 艺
(cOre oxide)或厚 10氧化 物 以实现 低漏 电率 的逻 辑 学 习 处 理 器 云 端 智 能 芯 片 MLU100 通 过 使 用
库 、内存 测试 与修 复 能力 以及 功耗 优化 套件 ,能 为 HAPS一80,能够加快其软件和系统验证迭代速度。
SoC带 来最 佳 的结 果质 量 。 (来 自 Synopsys)
瑞萨电子株式会社 (瑞萨电子 )与麦格纳近 日 联 合 宣 布 :双 方 将 合 作推 出专 为人 门级 到 中级 车 辆 设 计 、新 型 高 性价 比 3D环 视 解 决方 案 ,这将 加 速高 级 驾驶辅 助 系统 (ADAS)的量 产 和普及 。
该 3D 环 视 系 统 采 用 了瑞 萨 电子 高 性 能 低 功 耗 、专 为智 能 摄 像 头 和全 景 环 视 系统 而 优 化 的 片上 系统 (SoC)。通 过提供 3D环视安 全功能 ,新 系统 可帮助汽车制造商为更多汽车消费者提供更安全 、 先 进 的车 辆 ,进 而 为安 全 出行 做 出贡献 。 (来 自瑞 萨 电子 )
旭硝子研发中性玻璃可替代车用绿色玻璃
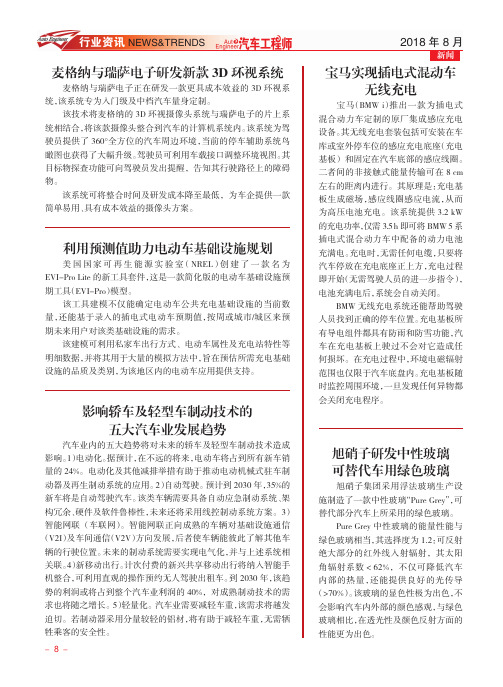
麦格纳与瑞萨电子研发新款 3D环视系统
麦格纳与瑞萨电子正在研发一款更具成本效益的 3D环视系 统,该系统专为入门级及中档汽车量身定制。
该技术将麦格纳的 3D环视摄像头系统与瑞萨电子的片上系 统相结合,将该款摄像头整合到汽车的计算机系统内。该系统为驾 驶员提供了 360全方位的汽车周边环境,当前的停车辅助系统鸟 瞰图也获得了大幅升级。驾驶员可利用车载接口调整环境视图。其 目标物探查功能可向驾驶员发出提醒,告知其行驶路径上的障碍 物。
2018年 8月
新闻ቤተ መጻሕፍቲ ባይዱ
宝马实现插电式混动车 无线充电
宝马(BMW i)推出一款为插电式 混合动力车定制的原厂集成感应充电 设备。其无线充电套装包括可安装在车 库或室外停车位的感应充电底座(充电 基板) 和固定在汽车底部的感应线圈。 二者间的非接触式能量传输可在 8cm 左右的距离内进行。其原理是:充电基 板生成磁场,感应线圈感应电流,从而 为高压电池充电。该系统提供 3.2kW 的充电功率,仅需 3.5h即可将 BMW5系 插电式混合动力车中配备的动力电池 充满电。充电时,无需任何电缆,只要将 汽车停放在充电底座正上方,充电过程 即开始(无需驾驶人员的进一步指令), 电池充满电后,系统会自动关闭。
该系统可将整合时间及研发成本降至最低,为车企提供一款 简单易用、具有成本效益的摄像头方案。
利用预测值助力电动车基础设施规划
美 国 国 家 可 再 生 能 源 实 验 室(NREL)创 建 了 一 款 名 为 EVI-ProLite的新工具套件,这是一款简化版的电动车基础设施预 期工具(EVI-Pro)模型。
旭硝子集团采用浮法玻璃生产设 施制造了一款中性玻璃“PureGrey”,可 替代部分汽车上所采用的绿色玻璃。
ADAS 和 ADAS 方案

ADAS 和 ADAS 方案ADAS sensor used mainly cameras, radar, laser and ultrasound, can detect light, heat, pressure or other variables used in monitoring the condition of the car, usually located in the vehicle front and rear bumpers, side mirror, a steering column or the interior windshield on the glass. Early ADAS technology based mainly passive alarm when the vehicle detects a potential hazard, alerts to remind motorists to pay attention to unusual vehicles or road conditions.ADAS systems typically include the following:从市场层面上看,目前和未来的ADAS应用的共同之处是将多种摄像头和超声传感器与专用实时处理系统相结合。
而Zynq-7000在视频/影像捕捉;视频/影像处理;自定义算法/Accelerators连接功能;编码/解码领域具有极大的灵活性。
2. ADI 低、中、高档视觉ADAS解决方案ADI基于视觉的ADAS系统提供车道偏离警告、交通信号识别、智能前灯控制、物体检测/分类、行人检测等功能。
基于雷达的系统具有类似的功能,此外还可提供前/后停车帮辅助、安全车距预警、车道变换辅助、盲点检测、碰撞缓冲刹车系统、全速范围自适应巡航控制等功能。
ADAS技术目前基本应用在高端车型中,主因是总体成本高,就ADI的高、中、低端汽车ADAS方案针对某一项或几项技术进行实现,并把成本降到2美元、十几美元,对整车厂商及消费者无疑是一大好消息,也为加速ADAS普及贡献了一份力量。
车米汽车夜视仪(全天候ADAS)1.0版本安装流程介绍

车米夜视仪安装流程(WIFI1.0)第一步:在安装车米夜视仪设备之前,打开包装盒,检查包装盒里是否有如下设备:(1)、夜视仪摄像头;(2)、车米WiFi模块(注:车米夜视仪单机版的没有);(3)、车米夜视仪摄像头的底座和配件;(4)、Acc延长线(注:在车米夜视仪的包装盒配有三条不同保险丝的Acc延长线);(5)、内存卡(注:车米夜视仪包装盒里标配是8Gtf 卡,车米夜视仪单机版有一个读卡器);(6)、保修说明书;(7)GPS天线(这里会配一套饰件);(8)、电源线和OBD线。
(注:在检查车米夜视仪包装盒中有以上设备,可以进行安装;如果发现少设备,须及时和供货的部门沟通。
)第二步:车上安装:1、在安装设备前,汽车在空挡的情况下,先发动一下汽车,检查一下汽车的仪表盘是否正常。
如果发现汽车有异常,应及时和车主沟通,说明车的情况。
如果没有异常,可以进行下一步安装。
2、在进行安装车米夜视仪底座前,先清洁一下汽车前挡风玻璃,车米夜视仪应安装在汽车雨刷器可以清洁到的汽车前挡风玻璃范围内。
3、清洁车内前挡风玻璃,安装车米夜视仪底座。
在清洁车内前挡风玻璃时,应先看看是否在汽车雨刷器能清洁的范围内。
在安装车米夜视仪的底座的时候,一定要注意车米夜视仪底座的上部,一定要和汽车前挡风玻璃的饰板保持平行。
(注:车米夜视仪底座粘上汽车前挡风玻璃三十分钟之内,不要安装摄像头)。
4、把车米夜视仪的摄像头取出,车米夜视仪的摄像头的背面左侧,有一个TF卡的卡槽,把TF卡安装在车米夜视仪的摄像头的卡槽里,以待备用。
(注:因为TF卡比较小所以我建议先安装在车米夜视仪的卡槽里,以免丢失)。
5、在等底座胶干的同时,可以把电源线束和GPS天线取出,在这个时候有两种可能:(1)、汽车前挡风玻璃上有后视镜饰板,这样的先需要拆卸汽车后视镜饰板。
(注:我现在还没有遇到)。
(2)、汽车前挡风玻璃上没有后视镜饰板。
(注:这种情况下,就根据车的实际情况来实施安装)。
禾赛 Pandora 自动驾驶环境感知套件 产品手册说明书
欢迎关注禾赛官方微信100-zh-1801A1注意为减少触电危险,避免违反保修条例,请勿私自拆开或改装雷达。
本产品不包含用户可维修零件,保修和维护请咨询禾赛科技认证的维修人员。
本产品激光安全等级符合以下标准: IEC 60825-1:2014;21 CFR 1040.10 and 1040.11 except for deviations pursuant to Laser NoticeNo.50, dated June 24, 2007;符合中国国家标准GB7247.1-2012。
激光安全等级本说明书内容归上海禾赛光电科技有限公司版权所有,如有修改,恕不另行通知。
本公司尽力确保该说明书内容的完整性和准确性,如您发现任何遗漏、错误之处,请联系禾赛科技,我司将会及时修订。
声明使用前请仔细阅读并遵循本说明书指导,同时可参考任何相关的国家和国际安全条例。
安全提示目录1.11Pandora-激光雷达02-031.2Pandora-摄像头041.3激光雷达与摄像头的同步采集和空间匹配051.4技术参数06产品介绍2.1机械安装072.2接口说明082.3连接使用09-10安装概述23.1激光雷达输出数据格式11-183.2摄像头输出数据格式19-203.3Pandora数据解析203.4Pandora Projection ROS20Pandora 输出数据34.1打开网页控制214.2参数设置224.3设备信息查询234.4固件升级24Pandora 网页控制425-27附录 IPandora 激光雷达线束分布28-31附录 II点云数据绝对时间和激光器发光时刻计算32-40附录 IIIPandarView41-42附录 IV售后技术支持及联系方式图1.1 Pandora构成激光雷达禾赛科技40线机械式激光雷达。
最远探测距离长达200米(20%反射率),测量频率高达720 kHz。
摄像头四个广角黑白摄像头与一个彩色摄像头的合理布局实现了车身周围360°全景采集。
瑞萨ADAS系统图像识别SoC方案

瑞萨ADAS系统图像识别SoC方案ADAS应用于车载安全系统,需要对环境图形进行过滤识别,真实的反映车身周围的影像,需要同时支持多个摄像头的数据解析,并能通过车载总线将数据传输出去。
为此,瑞萨专门为ADAS系统而打造的SH7766系列产品,是瑞萨图像识别SoC系列的新产品,在国内外市场中广受好评和青睐。
近年来,汽车界存在一个普遍的共识,即未来汽车会越来越智能,最终达到无人驾驶。
在此共识下,无人驾驶项目正在蓬勃发展,而ADAS又是汽车无人驾驶的前提,对解决交通事故高发的问题,以及减少人员伤亡具有非常重要的意义。
ADAS最初的定义是在车辆行驶过程中通过使用相机、雷达感应等功能来检测车道标志物和行人,达到协助司机安全行驶的目的。
ADAS应用于车载安全系统,需要对环境图形进行过滤识别,能够清楚的识别图像的细节,真实的反映车身周围的影像,需要同时支持多个摄像头的数据解析,并能通过车载总线将数据传输出去。
为此,汽车芯片供应商瑞萨专门为ADAS系统而打造的SH7766系列产品,是瑞萨图像识别SoC系列的新产品。
其集成了硬件引擎的环绕检测系统,包括一个失真校正引擎、图形引擎,和图像识别引擎,极大的优化了影像辅助功能,在国内外市场中广受好评和青睐。
瑞萨SH7766 产品框图如下图1:如上图SH7766的芯片框架,针对应用于ADAS所需的影像处理,可实现功能:1)周边物体检测(支持4路摄像头)2)高性能的图像识别引擎3)集成DRC(Dynamic Range Control),支持亮度纠正和补偿4)内置扭曲校正硬件IMR(Image Render Engine)瑞萨SH7766 系列产品ADAS方案:如上图,通过摄像头与图像传感器MLX75412(夜视,轨道偏离报警),将图像信息发送。
特斯拉转向全视觉方案

特斯拉转向全视觉方案引言特斯拉汽车一直致力于为驾驶员提供更高级的驾驶辅助系统和自动驾驶功能。
为了提升转向控制系统的精确度和安全性,特斯拉最近推出了一项全新的转向全视觉方案。
这个方案利用各种摄像头和传感器,通过计算机视觉技术来实现精确的转向控制,提供更加安全和舒适的驾驶体验。
方案概述特斯拉转向全视觉方案主要由以下几个组件组成:1.高清前置摄像头2.360度全景摄像头3.激光雷达传感器4.车速传感器这些组件工作在特斯拉车辆上,采集实时的图像和数据,并通过计算机视觉和传感器融合算法来进行分析和处理。
工作原理1.高清前置摄像头高清前置摄像头位于特斯拉汽车的前部,负责采集前方道路、交通标志和车辆等信息。
它通过计算机视觉算法进行实时分析,检测前方的障碍物、路况和交通标志,并将这些信息传输给转向系统。
2.360度全景摄像头特斯拉车辆配备了多个360度全景摄像头,安装在车辆的四个角落和车身的各个位置。
这些摄像头可以全方位地监测车辆周围的环境,包括其他车辆、行人和障碍物等。
通过将这些摄像头的图像进行融合和处理,转向系统可以准确地识别和定位周围的物体,并作出相应的转向决策。
3.激光雷达传感器激光雷达传感器通常安装在特斯拉车辆的前部和后部,可以通过激光束扫描周围环境。
激光雷达可以提供高精度的距离和位置信息,帮助转向系统更准确地感知路况和障碍物。
它与摄像头和其他传感器的数据相结合,形成综合的感知系统。
4.车速传感器特斯拉车辆还配备了车速传感器,用于测量车辆的实时速度。
这个数据对于转向控制至关重要,因为转向系统需要根据速度来确定合适的转向角度和转向力。
车速传感器与其他传感器的数据相结合,形成全方位的转向控制系统。
优点和应用特斯拉转向全视觉方案具有许多优点,可以带来许多应用场景:1.更高精度的转向控制:通过使用多个摄像头和传感器,特斯拉转向全视觉方案可以提供更准确、更精细的转向控制。
它可以自动调整转向角度和转向力,以适应不同的驾驶条件和交通状况。
特种车360全景环视系统产品采用功能模块化设计说明

特种车360全景环视系统产品采用功能模块化设计,产品集DMS疲劳驾驶预警系统、ADAS驾驶安全辅助系统、4G无线数据传输、GPS定位、视音频录像、远程控制为一体。
系统置车载宽电源,产品体积很小,安装方便简便,方便不同车辆的灵活使用。
室外摄像头可环视四周,同时车可控制,如有需要,可直接由管理中心统一掌控。
特种车辆360全景环视系统是通过安装在车身前、后、左、右的4个超广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,2D/3D拼接算法,无缝拼接全景视图。
全车雷达系统是有多个探头组成无死角的汽车全方位探测器,将信息反馈在显示屏上。
4G视频功能:远程实时视频、报警图片、视频远程回放、GPS轨迹倒查回放。
驾驶员行为分析系统主要能检测司机疲劳驾驶(打瞌睡、打哈欠)、分心驾驶(如:左顾右盼、抽烟、打等)、超速驾驶等不良驾驶行为,发出不同的语音提醒司机,为安全行车提供有效的汽车主动安全保障。
并且上传到远程管理平台后台并生成“安全辐助驾驶报表”、“驾驶行为分析报表”等报表统计,方便管理人员查看。
全程为驾乘者、营运单位及监管部门提供安全保障服务,有效规避危险情况的发生。
ADAS辅助驾驶系统融合了FCW、HMW、PCW、LDW、FVSM 和VB溜等功能。
驾驶员在行驶过程中实时采集车道偏移及防碰撞数据等,并语音及上传形式输出告警。
FCW车辆防撞预警系统,监测前方车辆,实际计算本车前车之间距离、方位及相对速度,当存在潜在碰撞危险时对驾驶者进行预警。
HMW车距间检测预警系统,当车辆速度超过设定值,且与前车绝对碰撞时间小于设定安全时间阔值,将发出预警信息。
PCW行人防撞预警系统,行人碰撞预警系统对行人和骑行者进行智能识别,计算出距离车辆40米围的行人距离,危险半径出现行人时,进行预警提示。
LDW车道偏离预警系统,车道偏离预警系统对行驶车道进行智能识别,在驾驶员无意识(未打转向灯)偏离原车道时发出警报。
我们还在该系统中增加了FVSM、VB功能,在塞车情况下可以提醒司机前车已启动和溜车情况,增加司机的驾驶体验和安全防护。
SURROUND 算法

环视系统
环视系统架构
环视摄像头
Surround view
2012环视系统的ECU 泊车辅助 4ch 摄像头/NTSC 2D 俯视/环视 IMR 图像识别 移动物体检测 行车道识别
5 © 2015 Renesas Electronics (China) Co., Ltd. All rights reserved.
Before a correction After a correction
alpha twice
Luminance distribution
Before a correction After a correction
beta twice
Intensity level (a) The correction methodology of a dark fill area
瑞萨电子为您提供SH7766, R-Car V2H高级驾驶辅助的解决方案
通过四路摄像头的环视监控系统, 更清晰、更美观地显示车辆四周的立体全景影像
21 © 2015 Renesas Electronics (China) Co., Ltd. All rights reserved.
高级驾驶辅助系统市场发展趋势
3 © 2015 Renesas Electronics (China) Co., Ltd. All rights reserved.
ADAS应用的发展
4 © 2015 Renesas Electronics (China) Co., Ltd. All rights reserved.
from 10 to 20 times Computation power compared with CPU
General Purpose Processor
bmw panoramic vision全景视觉 原理-概述说明以及解释

bmw panoramic vision全景视觉原理-概述说明以及解释1.引言1.1 概述:在现代社会,科技的发展已经深刻地改变了我们的生活方式和工作方式。
作为高端汽车制造商之一的BMW,不仅在汽车设计和性能方面领先,还在技术创新方面不断突破。
其中,BMW的全景视觉技术在汽车行业中引起了广泛注意。
全景视觉技术通过多方位的摄像头系统和先进的图像处理算法,实现了对车辆周围环境的全方位监测和展示,大大提高了驾驶安全性和便利性。
本文将详细介绍BMW全景视觉技术的原理和应用,探讨其在汽车行业中的重要性和未来发展前景。
通过研究和了解全景视觉技术,可以更好地认识和理解现代汽车领域的科技创新,并为未来的技术发展和智能化驾驶做出贡献。
1.2 文章结构:本文将分为三个主要部分来探讨BMW全景视觉技术。
第一部分为引言,介绍全景视觉技术的背景和意义,以及本文的结构和目的。
第二部分将详细介绍BMW全景视觉的特点和原理,解析其工作原理和技术特点。
第三部分将探讨全景视觉技术的应用和优势,以及对未来发展的展望。
最后,结论部分将总结全景视觉在汽车行业中的重要性,展望未来可能的发展趋势,并结束本文。
通过这种结构,读者可以全面了解BMW全景视觉技术的相关信息,从而对其有更深入的认识和理解。
1.3 目的:本文的主要目的是介绍BMW全景视觉技术的原理和应用,让读者对该技术有一个更全面的了解。
通过深入分析全景视觉的工作原理,帮助读者了解BMW车辆如何实现360度全景视觉,并探讨这一技术在汽车行业中的应用和优势。
希望本文能够为读者提供有价值的信息,帮助他们更好地了解现代汽车技术的发展趋势和未来发展方向。
2.正文2.1 BMW全景视觉介绍BMW全景视觉是一种先进的汽车驾驶辅助系统,它通过将多个摄像头的视野合并在一起,为驾驶者提供全方位的视野,帮助他们更清晰地了解周围环境和道路情况。
这种系统可以显示车辆周围360度的全景图像,并结合车辆的导航系统提供全方位的信息,使驾驶者更加安全和便利地驾驶车辆。
车载高清全景环视系统量产化方案研究

1 车载全景环视系统传统用途(1)削除泊车场景盲区:泊车时输出实时全景鸟瞰图视频,用户还可以切换前后左右不同的视图角度,图像更直观,消除车身周围盲区,不管侧方位泊车、垂直泊车、斜车位泊车都能看清车身周围障碍物,提高停车效率,有效防止停车时刮蹭,减少车主顾虑和麻烦。
(2)狭窄道路的辅助驾驶:狭窄道路会车、狭窄城中村道路、狭窄桥梁、狭窄乡村小道、道路上有坑洼或障碍物等,全景环视系统可以看清车辆周围的障碍物及评估车辆周围障碍间的距离。
(3)消除转弯时的盲点,提高安全性。
摄像头位于驾驶员前方,因此可以提前看到路况,尤其是在车转弯时,还可以看到左右后视镜的死角,加大环视系统的应用场景。
(4)ADAS智能高清全景环视系统:通过神经网络分类探测识别,全景控制器在泊车过程中可以识别雪糕桶、地锁、轮阻器、禁停标志等静止障碍物,以及行人、自行车、车辆移动障碍物,还可以探测障碍物距离,并且融合超声波距离,以可视化图案或声音实时提醒预警驾驶员,评估潜在碰撞风险,并可实现车辆自动紧急制动,进一步降低碰撞风险,让车辆更安全。
2 车载全景环视系统功能描述2.1 车载摄像头功能说明摄像头主要包括镜头、图像传感器、ISP 信号处理器、串行器、电源共五部分,图1所示。
(1)镜头。
(2)CMOS图像传感器:通过镜头聚焦到CMOS传感器感光阵列,将模拟光信号转换为数字电信号数据,同时还集成A EC自动曝光量控制、AGC自动增益控制、AWB自动白平衡处理、黑电平控制、伽玛校正等。
车载CMOS传感器主要以中国豪恩科技OmniVision、日本索尼Sony、美国安森美Onsemi。
(3)ISP图像信号处理器:接收CMOS图像传感器的输出原始数据,进行颜色转换、噪声抑制、阴影校正、变形处理、色调调整、图像边缘增强等。
(4)串行器:接收CMOS图像传感器图像数据,将并行图像数据编码后转换为串行数据,输出到同轴线束。
(5)POC(Power Over Coax)是视频信号和电源叠加共享一条同轴线缆。
ADAS省心方案

ADAS省心方案ODD:Operational Design Domain。
设计运行域。
指自动驾驶系统被设计的起作用的条件及适用范围,如天气环境、道路情况(直路、弯路的半径)、车速、车流量等信息作出测定,以确保系统的能力在安全环境之内。
DDT:Dynamic Driving Task,动态驾驶任务。
指汽车在道路上行驶所需的所有实时操作和策略上的功能(决策类行为),不包括行程安排、目的地和途径地的选择等战略上的功能。
DDT Fallback:动态驾驶任务支援。
自动驾驶在设计时候,需要考虑系统性的失效(导致系统不工作的故障)发生或者出现超过系统原有的运行设计范围之外的情况,当这两者发生的时候,系统需给出最小化风险的解决路径。
ADAS/AD解决方案:针对L0~L5的ADAS/AD系统,目前解决方案如下。
L0~L2为分布式系统架构,主要基于单摄像头或单雷达一体机式实现驾驶辅助功能。
L 3~L5为集中式架构,除了外围的传感器,存在域控制器,用于多传感器数据融合,对视觉、毫米波雷达、超声波雷达、激光雷达、高精度地图,高精定位、V2X等数据进行融合处理,并进行决策、规划、控制等算法的实现。
分布式架构和集中式架构:**分布式架构(L0~L2):**感知和计算一体式模块,如前视摄像头模块为例(FCS),整个模块将镜头模组、计算平台主板被整合在一起;ECU主板内含2个芯片:安全核(Safety Core)和性能核(Performance Core)的主流芯片组合架构方案,安全核一般为MCU,算力要求不高,功能安全等级较高,实现逻辑运算,主要实现决策控制算法、诊断、通讯等。
性能核一般为SOC,算力要求较高,主要实现感知算法:**集中式架构(L2+~L5):**随着自动驾驶等级的增加,自动驾驶实现的功能越发复杂,对感知要求也相应提高,此时需要完成多传感数据融合处理,这时候分布式架构便不能完全满足算力递增对硬件的要求,因此域控制的概念随之而生。
3D全景环视系统:360°扫盲区

3D全景环视系统:360°扫盲区陈秀娟【期刊名称】《汽车观察》【年(卷),期】2018(000)007【总页数】1页(P95)【作者】陈秀娟【作者单位】【正文语种】中文3D全景环视系统从360度全景视野拓展了驾驶员对周围和环境的感知能力。
泊车,是众多驾驶者头疼的问题,即使是经验丰富的司机也有过剐蹭经历。
目前,虽然已有各种摄像头和雷达产品出现,但是基于单个后视摄像头的可视倒车雷达只能看到车身正后方,无法同时看清车身四周状况,存在视角盲区。
近期,麦格纳国际与瑞萨电子携手合作,推出专为入门级和中端车型设计的全新高性价比3D全景环视系统。
该系统专为辅助用户安全、直观地行车与泊车而开发,将成为泊车系统的发展趋势。
具体来说,此次麦格纳推出的3D全景环视系统是一款提供360度全景视野,能同时采集车辆四周的实时影像,经过性能超强图像处理单元的一系列智能算法处理之后,形成一幅车辆四周的全景俯视图,在泊车或低速行驶时为驾驶者提供辅助的车载摄像系统。
驾驶者可通过简单易用的界面来调整周围环境的视角,在行驶中可直观地查看车辆所处的位置和周边情况,同时在行驶中遇到障碍物时,物体检测装置会向其发出警报,从而保证行车安全,提升驾驶体验。
这款全景环视系统采用瑞萨电子高性能、低功耗的片上系统(SoC),对智能摄像头和全景环视系统进行优化。
通过启用3D全景环视安全功能,这款创新、即用型系统把集成时间和开发成本降到最低,可以帮助汽车制造商为广大汽车消费者提供更安全、更先进的车辆,从而打造一个更安全的驾驶环境。
对此,瑞萨电子株式会社汽车解决方案业务部高级副总裁兼副总经理吉冈真一表示:“自动驾驶系统需要可扩展性,以满足汽车消费者的多种需求。
此次合作把我们一流的汽车半导体专业技术与麦格纳的世界级汽车系统创新技术相结合,是为各类车型提供高性价比3D全景环视系统的重要一步,从而有助于我们为不同价位的车辆带来极具价值的安全装置。
”关于这款系统未来的落地应用情况,麦格纳电子总裁申克磊介绍,对于这项技术,目前已有数家汽车制造商表示出浓厚的兴趣,其中包括一家欧洲汽车制造商。
瑞萨推出全新四通道视频解码器,助力车载摄像头实现经济型环视应用

瑞萨推出全新四通道视频解码器,助力车载摄像头实现经济型
环视应用
佚名
【期刊名称】《世界电子元器件》
【年(卷),期】2024()2
【摘要】全球半导体解决方案供应商瑞萨电子(TSE:6723)今日宣布推出车载高清链路(AHL)产品组合中的最新器件RAA279974,使汽车制造商能够通过低成本的电缆和连接器传输高清视频。
全新RAA279974四通道AHL视频解码器可同时处理四个输入源,成为环视和多摄像头应用的经济型解决方案。
瑞萨AHL技术基于调制模拟信号传输视频。
其频率比目前市场上的数字传输解决方案低10倍(前者约为37MHz,后者为3GHz或更高),从而使其具有强大的抗噪能力,并能使用非屏蔽双绞线和标准连接器实现更长的传输距离(20-30米),同时也支持现有标清模拟视频电缆及连接器。
【总页数】2页(P33-34)
【正文语种】中文
【中图分类】U463.6
【相关文献】
1.瑞萨电子推出配备嵌入式旋变解码器的全新V850E2P微控制器系列
2.Intersi I 推出新款四通道视频解码器,可应用于车载全景环视系统
3.德州仪器面向视频监控终端设备推出3款全新多通道视频解码器
4.瑞萨电子简化了用于车载全景环视
摄像头系统的电源设计5.瑞萨电子推出配备嵌入式旋变解码器的全新V850E2P微控制器系列
因版权原因,仅展示原文概要,查看原文内容请购买。
5s场景介绍汽车倒车影像

5s场景介绍汽车倒车影像
原厂360全景每一个摄像头都是广角摄像头,通过四个摄像头采集车辆四周的影像,经过360模块算法矫正和拼接后,形成一幅车辆四周的360度全景俯视图输出到显示器上,让驾驶员通过显示屏可以直观地看到车周360度全景俯视图,不再有视野盲区,实现倒车画面现场直播、泊车、倒车轻松无忧!特有的3D建模技术,全景影像配合原车的雷达感应系统一并呈现在中控屏幕上,让驾驶员可以更直观更清楚得看见车身四周的情况,避免了因为盲区导致的刮蹭,碰瓷,更能保证倒车时车辆本身和周围行人的安全,即使是在山区道路或者街边小巷有360全景辅助都可以让你驾驶汽车行如流水,进退自如。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
瑞萨电子一体式ADAS全景环视解决方案套件详解
日本东京讯——全球领先的半导体解决方案供应商瑞萨电子株式会社近日宣布推出一款全新一体式先进驾驶员辅助系统(ADAS)全景环视解决方案套件。
2015年10月8日,瑞萨电子推出第一代ADAS全景环视套件,并取得成功。
在此基础上升级迭代的第二代ADAS可视解决方案套件,最多可搭载8个摄像头,同时实现了新一代电子后视镜(注1)、驾驶员监测和全景环视系统。
瑞萨电子ADAS全景环视解决方案套件
视觉应用被视为实现自动驾驶进程中下一项重要的舒适与安全功能。
此外,它已成为自动驾驶和ADAS应用的标准,可实现传感器融合技术。
此技术结合并处理从车载摄像头和雷达收集的信息,以识别汽车周围的环境。
预计所有汽车都将配备360度全景环视系统。
此外,后视镜将被车载摄像头所取代,自动驾驶将需要驾驶员监控功能来提高安全性。
基于车载摄像头的电子后视镜将实现对象检测、视角修改及缩放功能。
驾驶员监测将有助于构建安全、自动驾驶3级及以上(注2)的车辆(在某些情况下仍需驾驶员进行干预),并能够监控常规车辆中驾驶员的注意力集中情况。
为了应对这些变化,瑞萨电子推出了一体式ADAS全景环视解决方案套件。
该套件配备了最新发布的基于R-Car H3片上系统(SoC)的“R-Car入门套件Premier”汽车软件开发环境,ADAS应用软件开发所需的样本应用软件以及用于校正全景环视图像失真的校准软件。
该解决方案套件最多可搭载8个车载摄像头,允许开发人员从环境中收集传感器融合的数据,为实现自动驾驶迈出了坚实的一步。
ADAS全景环视解决方案套件参加11月8日至11日在德国慕尼黑举行的2016年慕尼黑电子展,在A6展厅342展台展出。
新型ADAS全景环视解决方案套件的主要特点:
(1) 使用R-Car入门套件Premier,支持最多可达8个摄像头,用于全景环视系统、电子后视镜和驾驶员监测
新型ADAS全景环视解决方案套件包括四个摄像头,但摄像头的功能性使得它可再额外添加四个摄像头,以最大限度地提高摄像头的全面处理能力。
使用来自豪威科技股份有限公司的130万像素汽车传感器,将最多可达8个来自Integrated Micro-electronics,Inc. 的小型摄像头通过美信集成产品公司的高速千兆多媒体串行链路(GMSL)串行器和方形解串器连接。
此设置搭配瑞萨电子功能强大的“R-Car入门套件Premier”,简化了360度全景环视系统的开发,并搭载了用于电子后视镜功能及驾驶员监测的摄像头。
(2) 基于R-Car入门套件Premier并搭载样例应用程序和校准软件的一体化解决方案
新型ADAS全景环视解决方案套件是基于R-Car入门套件的一体化解决方案,包括可在线使用的样例应用程序和校准软件,使得系统开发人员可立即启动开发。
样例应用软件可帮助刚入职的开发人员。
通过使用二进制代码的样例应用软件,即可观察到任意视角的R-Car H3 GPU,可以实现动态全景环视系统。
在不具备GPU或CPU的情况下,通过使用校正图像失真的校正软件和源代码中的样例软件即可实现静态环视系统。
静态全景环视系统软件采用了瑞萨电子的图像渲染(IMR)技术。
(3) 采用基于R-Car H3的R-Car入门套件Premier,具备高性能的开发环境
● R-Car H3高性能GPU用于高帧率动态3D全景环视系统
R-Car H3采用了来自ImaginaTIon Technologies的PowerVR? GX6650,这是一款功能强大的图形处理单元(GPU)内核。
它可以通过任意视角、高分辨率图片组合,及高度详细的车辆渲染实现360度全景环视功能。
● IMR技术用于静态全景环视系统、电子后视镜和驾驶员监测
R-Car H3搭载瑞萨电子图像渲染(IMR)技术,在GPU必须用于其它应用,或系统开发人员希望评估静态全景环视系统时,可通过预定义视点实现低成本全景环视功能。
IMR还用于电子后视镜和驾驶员监测摄像头的缩放和视角调整。
● 采用视频信号处理单元,可提供4k高分辨率的清晰图像
R-Car H3中采用的瑞萨电子视频处理单元能够以超高分辨率(UHD)叠加智能视频图像,构成全景环视系统,为TIer1提供高度灵活性,并为OEM选出最终高品质图像。
应用程序和对象检测的高性能
R-Car H3的CPU内核为应用和计算机视觉实现提供40,000个DMIPS(注3)增强处理。
此外,GPU上的OpenCL可为软件工程师提供实现认知功能的选项,提高安全功能。
定价和供货
ADAS全景环视解决方案套件计划于2017年1月推出,搭载ADAS入门套件Premier和四个摄像头。
还可选购外加四个摄像头,以充分体验该解决方案带来的最大优势。
除瑞萨电子销售公司和代理处有售外,这两种产品也可从在线零售商处购买。
样本应用软件和校准软件将在线提供;欲了解供货的详情,请访问瑞萨电子ADAS全景环视解决方案套件网页。
(定价和供货情况如有变更,恕不另行通知。
)
(注1)电子后视镜为替换普通汽车后视镜的摄像头,便于驾驶员查看汽车周围的环境。
(注2)SAE InternaTIonal(SAE)标准定义车辆自动化水平。
SAE定义基于“驾驶执行人及驾驶时间”划分车辆级别。
在SAE 3级水平,自动化系统可以实际执行一些驾驶任务,并在某些情况下监测驾驶环境,但当自动化系统请求时,驾驶员必须做好接管控制准备。
(注3)DMIPS(Dhrystone每秒百万条指令):使用Dhrystone基准程序计算的计算性能指数。