机器人:一种三自由度并联解耦机构的构型与运动学分析
3自由度并联机器人的运动学与动力学分析_刘善增

第 45 卷第 8 期 2009 年 8 月
机械工程学报
JOURNAL OF MECHANICAL ENGINEERING
Vo l . 4 5 N o . 8 Aug. 2009
DOI:10.3901/JME.2009.08.011
3 自由度并联机器人的运动学与动力学分析*
刘善增 1, 2 余跃庆 1 佀国宁 1 杨建新 1 苏丽颖 1
(1. 北京工业大学机械工程与应用电子技术学院 北京 100124; 2. 中国矿业大学机电学院 徐州 221116)
1 3-RRS 并联机器人的运动学分析
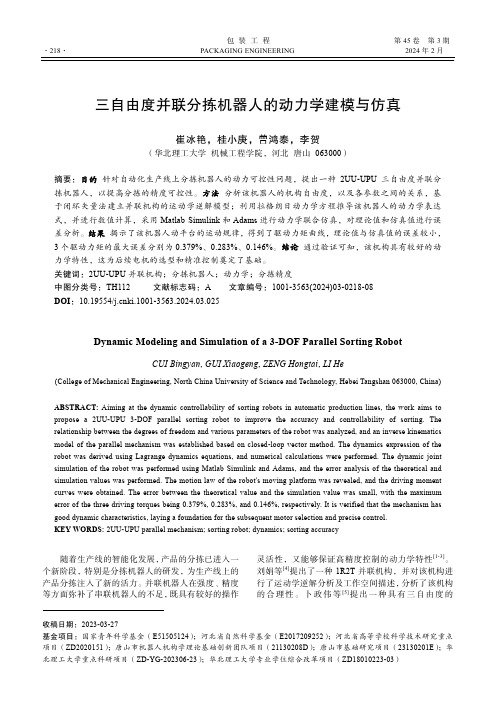
一种空间 3 自由度并联机器人的结构简图,如 图 1 所示。它由一个动平台 P1P2P3,三条支链 BiCiPi(i=1, 2, 3)和一个静平台(基座)B1B2B3 组成。其 中,动平台通过球面副(S 副)与各支链连接,静平台 通过转动副(R 副)与各支链连接,且 Bi 处转动副的 轴线与 Ci(i=1, 2, 3)处转动副的轴线对应平行。分别 建立与动平台固结的局部(动)坐标系 Pxyz 和系统 (固定)坐标系 OXYZ,如图 1 所示,坐标系的原点 P 和 O 分别位于动平台和静平台的几何中心,轴 z 和 Z 分别垂直于动、静平台向上,轴 x、y 与 X、Y 分 别平行和垂直于上、下平台的边 P2P3 与 B2B3。局部 定坐标系 Bixiyizi (i=1, 2, 3)的 xi 轴与 Bi 处转动副轴线 一致,zi 垂直于静平台 B1B2B3 向上,yi 轴同时垂直 于 xi 和 zi 轴。
一种三自由度解耦并联平动机构

一种三自由度解耦并联平动机构近几年来,机器人领域的研究取得了长足的进步,各种新型机构的设计不断涌现。
其中,解耦并联平动机构因其在空间平动方面具有较好的性能,受到了广泛的关注。
本文将介绍一种三自由度解耦并联平动机构的设计原理、结构特点和应用前景。
一、设计原理该机构是一种平行四连杆机构,由上、下评台和四个连杆组成。
其中,上、下评台分别固定在机器人的移动评台和基座上,通过四个连杆将两个评台连接起来。
通过设计连杆的长度和角度,可以实现线性运动,并且可以将平移运动的方向和速度进行独立控制。
二、结构特点1.三自由度解耦:该机构通过精心设计连杆长度和角度,实现了三个自由度的解耦。
即可以分别控制X、Y和Z方向的平移运动,从而具有更灵活的运动方式。
2.稳定性高:由于平行四连杆机构的特点,该机构在运动过程中具有较好的稳定性,可以适用于复杂的工作环境。
3.结构简洁:由于该机构只由上、下评台和四个连杆组成,结构简洁,易于制造和维护。
三、应用前景1.工业制造:该机构可以用于工业制造中的自动化装配线上,实现对工件的精准定位和运动控制。
2.医疗器械:在医疗器械领域,该机构可以应用于手术机器人的运动部件,实现对手术工具的精确操控。
3.航空航天:在航空航天领域,该机构可以用于太空探测器的核心零部件,实现对探测器的平移运动和定位控制。
四、结语三自由度解耦并联平动机构作为一种新型的机械结构,在工业制造、医疗器械和航空航天等领域具有广阔的应用前景。
随着机器人技术的不断发展,相信这种机构将会在未来得到更广泛的应用和推广。
五、性能优势该三自由度解耦并联平动机构具有许多性能优势,使其在机器人领域备受青睐。
该机构具有较高的定位精度和重复定位精度。
由于机构设计合理,运动部件的相对位置和方位角度能够保持较好的稳定性,在进行运动控制时能够实现较高的精度要求。
该机构的运动轨迹平滑,并且具有较强的载荷承载能力。
这意味着机构在运动过程中产生的振动较小,能够较好地适应工作环境的变化,同时能够承载一定重量的工作载荷。
并联机器人的运动学分析
并联机器人的运动学分析一、引言机器人技术作为现代工业生产的重要组成部分,已经在汽车制造、电子设备组装、医疗器械等领域发挥着重要作用。
而在机器人技术中,并联机器人以其独特的结构和运动方式备受关注。
本文将对并联机器人的运动学进行深入分析,探讨其工作原理及应用前景。
二、并联机器人的运动学模型并联机器人由多个执行机构组成,这些执行机构通过联接杆件与运动基座相连,使机器人具有多自由度运动能力。
为了对并联机器人的运动学进行建模,我们需要确定每个执行机构的运动关系。
其中,分析最为常用的是基于四杆机构的并联机器人。
1. 四杆机构的运动学模型四杆机构是一种由两个连杆和两个摇杆组成的机构,通过这些部件的相对运动实现机构的运动。
在并联机器人中,常见的四杆机构包括平行型、等长型等。
以平行型四杆机构为例,我们可以将其简化为平面结构,并通过设定适当的坐标系进行建模。
在平行型四杆机构中,设两个连杆为L1和L2,两个摇杆为L3和L4。
定义坐标系,以机构的连杆转轴为原点,建立运动坐标系OXYZ。
假设L3的转角为θ3,L4的转角为θ4,连杆L1和L2的长度分别为L1和L2,则可以通过几何关系得到机构的运动学方程。
2. 并联机器人的运动学模型并联机器人由多个四杆机构组成,各个四杆机构之间通过杆件连接,使得整个机器人能够实现更复杂的运动。
以三自由度的并联机器人为例,每个四杆机构的连杆长度、摇杆转角都有一定的自由度限制。
通过对每个四杆机构的运动学模型进行分析,可以得到整个并联机器人的运动学方程。
三、并联机器人的动力学分析除了运动学分析,动力学分析也是对并联机器人进行研究的重要方向。
动力学分析包括对并联机器人在运动过程中的力矩、加速度等动力学参数的研究,是实现机器人精确控制和安全运行的基础。
1. 动力学模型的建立在并联机器人的动力学分析中,我们通常采用拉格朗日方法建立动力学数学模型。
通过拉格朗日方程可以建立机器人运动学和动力学之间的联系,从而实现对机器人运动过程中各个关节力矩的估算。
一种新型空间三自由度并联机器人的运动学与工作空间分析

4 3 2
自监 .科乎遗展 第1卷 第4 20年4 8 期 0 8 月
一
种 新 型 空 间三 自由度 并联 机 器人 的 运动学 与工作空 间分析 *
张克 涛 “ 方 跃 法
北 京 交 通 大 学 机 械 与 电 子控 制 工 程 学 院 ,北 京 10 4 004
构 而提 出 的新 机 构 . 自 1 9 9 8年 提 出后 ,引 起 了 国 内外机构 学学 术界 的 广泛 兴 趣. 这 一新 类 型 机 构 能
新型 并联 机器人 的结 构进 行 了详 细 的描 述 ,应 用 广
义运动 副概 念 和螺旋 理论 对该 新 型并 联 机器 人 的
自由度特 性 进 行 了 分 析 . 根 据 运 动 链 等 价 替 换 原
这类 机构 都 可 以 归 属 于 含 有 闭 环 子 链 的 并 联 机 构.
其他 对 于 三 自由 度 并 联 机 器 人 的 研 究 有 :Tsi a 和 Ki 在 2 0 m 0 3年 研 究 了空 间 3RP - S并 联 机 器人 的运
动 综合 .Grg r j e oi o讨论 了三 自 由度 并 联 机 构 分 支
* E mal t- i @1 3 c r * — i :zuyn 6 . o n
维普资讯
自 兰科乎逍展 第1卷 第4 20年4 8 期 08 月
器人 的工 作空 间和 转 动 能力 分 析提 供 基 础 ;详尽 地
分析 了该 机器 人 的工作空 间 .
理口 ,给 出 了其运 动学 位 置 反解 和 正解 ,为该 机 。
够 根据环 境 和工况 的变化 和任 务需 求 ,进 行 自我 重
2 0—51 0 70 —1收 稿 ,2 0 —10 0 71 —6收 修 改 稿 * 国 家 自然科 学 基 金 资 助 项 目( 准 号 :5 6 5 1 ) 批 0 70 6
三自由度绳驱动并联机器人运动学分析
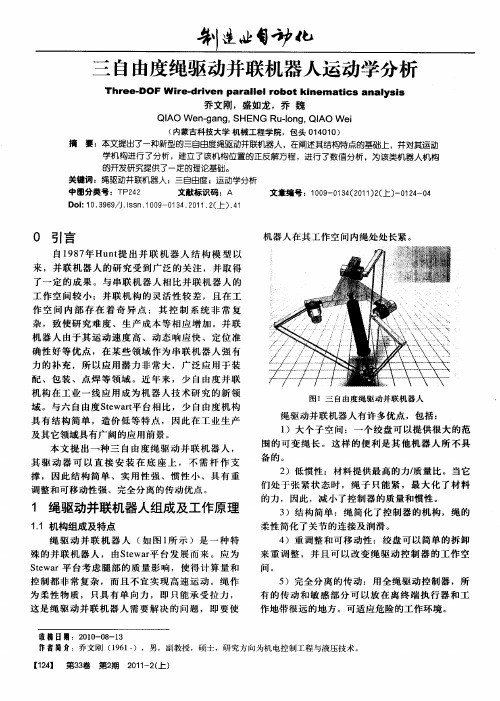
5 )完全分 离 的传 动 :用全 绳驱 动控 制器 ,所
有 的传 动 和 敏 感部 分 可 以放 在 离 终端 执 行 器 和工 作地带 很远 的地方 。可适应 危险 的工作环境 。
作 者 简i :乔 文 刚 (9 1 ), 男 ,副 教 授 ,硕 士 ,研 究 方 向为 机 电控 制 工程 与 液 压 技 术 。 t 16 一 [2] 第3卷 14 3 第2 期 2 1- ( ) 01 2上
作 空 间 内部 存 在 着 奇 异 点 ;其 控 制 系 统 非 常 复 杂 ,致 使 研 究难 度 、 生产 成本 等 相 应增 加 。并联 机 器人 由于其 运 动速 度 高 、动 态 响 应快 、定 位 准
确性 好 等 优点 ,在某 些 领域 作 为 串联 机 器 人 强有
力 的补充 ,所 以应 用 潜 力 非常 大 ,广 泛 应 用于 装 配 、包 装 、点焊 等领 域 。近 年 来 , 少 自 由度并 联
7 l i )Oi 与 的夹 角 :x 8 2 绳 与Xi )0i : 的夹 角 9 3 绳 与Y 的夹 角 )0i :
和 气缸 与上 下 平 台的 连 接 ) 。由于 气 缸 的两 端 分
别 安装 在 两 平 台的 几何 中 心 ,所 以起 辅 助 支 撑 作
用 不参 与机 构 主 要 运动 。 该机 构 的 动 力 源 来 自安 装 在基 座 上 的伺 服 电机 ,每 个 电机 驱 动 一 组 摆 杆
、 l
1 动 作原理 . 2
三 自由 度绳 驱 动 并 联 机 器 人 共 计 九 个 关 节 ,
包 括 三个 转 动 关 节 ( 电机 与摆 杆 的 连 接 )和 有 即 六 个球 面 副关 节 ( 绳 与 摆 杆机 、动 平 台的 连 接 即
3自由度Delta并联机构的特性分析与运动仿真

AbstractParallelrobothasmoreadvantagesthanserialrobots.3degreeoffreedomparallelrobotisanimportantpartinthefamilyofparallelrobot.DeltaParallelRobotwithitshighspeed,highrigidity,highprecision,hastheadvantagesoflargeworkingspace.Itisintheindustrial,medicalandotherfieldsareplayinganimportantrole.Itisalsoincreasinglysubjecttopeople’Sattention.Inthispaper,byusingthedeltarobotastheresearchobject,analysesitscharacteristicsandmotionparallelsimulation.Theresearchcontentmainlyincludesmechanismcharacteristicmatrix.workspace,motionreliability.Parallelmechanismconfigurationandvariouspartsofthemotoroutputarethebasiccharacteristicsoftheparallelmechanism.FirstIobtainabranched(SOCS)featurematrixoftheparallelmechanism.ThenIthroughthestudyofparalleltheorem,synthesisofthebranchedmotion,Igetthewholecharacteristicmatrixofparallelmechanism.Theworkspaceisanimportantstandardtomeasurethequalityofparallelrobot.ItiSalsoanimportantcharacteristicofparallelmechanism.Accordingtothehelixstructureofdeltaparallelmechanism,lsetupthespacecoordinatesystem.Therelationbetweeninputsandoutputs.IestablishtheconstraintequationsandtheJacobimatrix.1establishequationaccordingtotheinfluenceofdexterityofparallelmechanism.1makethesizeparametersofthemechanismiSbetter.Imakethesizeparametersofthemechanismisbetter.Igettheworkingspaceofparallelmechanismbysurfaceenvelopeprinciple.Istudyontheeffectofdifferentparameterstotheworkspace,fmdthemethodtOoptimizetheworkingspace.Sincetheoriginalerrorsofdifferentinstitutionshavedifferentsources.MotionreliabilityisanimportantcharacteristicofDeltaparallelmechanism.1setupthemechanismpositionerrorcontainsthedimensionerror,mechanismofrotatingiointclearanceerroranderrorcalculationmodel.Igetthemotionreliabilityofmechanism.MotionreliabilityanalysisiSameasureofthestandardMotionaccuracyofthemechanism,andmotionreliabilityanalysisisabasicofmechanismoptimizationdesignanderrorcompensation.Finally,lcarriedonthemovementsimulationoftheDeltaParallelmechanism.Iestablishedthemodelof3DmodelingsoftwarewithSolidWbrks.inaccordancewiththeanalysisonthemechanismofconfiguration.ThroughtheestablishmentofSolidW|orksinterfacewithMatlab/SimLink.1willentitymodelintotheparallelmechanisminMatlab.GetconnectionmoduleintheMatlab/SimlinktoolboxinSireMechanics.1wereaddedtoactivememberandthemovingplatformmoduleandsensor.Getwiththeforwardsolutionofparallelmechanismdirectly.Andthecorrectnessofverificationmechanismmotionoutput,workingspace,motionreliabilityanalysisonthemechanismofpositivesolution.Keywords:DeltaParallelmechanism;Characteristicmatrix;Workspace;MotionReliability河北工程大学硕士学位论文厂(s)=五万丽(4.11)应用矩法(数理统计中的算法)可以近似的求得f(S)的均值和方差并通过蒙特卡罗法【381(是一种计算机化的数学方法)确定总位置误差的分布。
DELTA并联机器人运动学分析与控制系统研究共3篇

DELTA并联机器人运动学分析与控制系统研究共3篇DELTA并联机器人运动学分析与控制系统研究1DELTA并联机器人是一种特殊的平面机器人,其构建方式是有三个"手臂"连接到一个平台上,形成了一个三角形的平面结构。
它具备高速、高精度和高可靠的特性,因此在组装、分拣和包装等领域有着广泛的应用。
机器人的运动学分析是研究机器人在运动时各种运动参数、关节位姿、速度和加速度等因素的关系。
DELTA机器人因为它的三角形平面结构,运动学模型相比于其他机器人则非常复杂。
在这种结构中,每个关节的运动都会对另外两个关节产生影响,因为每个关节都是相互连接的。
因此,建立运动学模型需要使用到复杂的几何算法和数学方程式。
在控制系统中,我们需要用某种方式去实现机器人的轨迹规划以及运动控制。
对于DELTA机器人,高速度和高精度都是极其重要的考虑因素。
在轨迹规划方面,我们需要考虑运动学模型,同时结合应用中的实际需求来确定机器人工作范围和路径规划。
在运动控制方面,我们需要提供特定的学习算法和控制器,同时考虑实时性需求,以确保机器人的控制是稳定和可靠的。
总的来说,DELTA并联机器人运动学分析与控制系统是一个复杂的问题,需要对机器人的构造和应用进行全面的考虑。
要想达到最佳的控制效果,我们需要基于准确的运动学模型建立合适的控制系统,并且不断地优化和改善整个系统,从而使得机器人在应用中得到最大的利用价值。
DELTA并联机器人运动学分析与控制系统研究2DELTA并联机器人是一种非常灵活和高效的机器人系统,它可以用于许多不同的应用领域,包括工业自动化、医药制造、食品加工、航空航天等等。
但是,要充分发挥DELTA并联机器人的优势,需要对其进行正确的运动学分析和控制系统研究。
一、DELTA并联机器人的基本结构和工作原理DELTA并联机器人由三个运动自由度的臂和三个固定的连杆组成,臂和连杆的结构构成一个平行四边形,并通过球面铰链联接。
一类新型全解耦三平移并联机器人机构的构型设计
tert a b ifr ei n r t a apia it i n vl c a i . h o i l a s o s na d a il p l blyo t s o e meh ns e c s d g p cc c i fh m
Ke r s: y wo d Par le ni l t r; c upI ; n g a i n d sg S ng e o ne c ai a l lma pu a o De 0 e Co f ur to e i n; i l pe d h n i
一
种新型三维纯平移并联机器人机构。 该机构运动输入—输出变
量之间存在一一对应关系 ,即拓扑结构具有完全控制解耦性 , 显 动输入变量( ) ~ 的函数 , 则称输入—输 出变量之 间为强耦合 ; 著简化了控制问题 , 且其运动学 、 动力学分析亦非常简单 。 若某些运动输出变量仅为部分主动输入变量 0 O ( - r 其中 Or <( )
带来 了不小 的麻烦 , 这也正是并联机器人机构未能广泛应用于实 位移输出特征矩阵应为
结的联器 但取得的效果远不能令人满意[探新 构并机人 星竺 耋5 索 1中每个运动输 出变量 (,,, , 均 为所有 主 xy , )
本文基于单开链结构原理和拓扑结构控制解耦准则, 提出了 1 . 2运动 控 制解 耦 性
(S h o o t a dP y , a c agU ies yN nh n 3 0 1C ia c ol f h n h sN nh n nvri , a c ag3 0 3 ,hn ) Ma t
j
【 摘 要】 基于单开链结构原理和拓扑结构控制解耦准则, 出了一类新型三平移并联机器人机 构, 提
机 械 设 计 与 制 造
一种三自由度并联驱动平台机构的空间位置解算和分析
三自由度并联平台的原理示意图如图 1 所 示 ,它是由上运动平台 、三自由度球形铰链 、伸缩 支撑杆 、单自由度销轴副 、两自由度的球销副和下 固定平台等组成. 和其它的三自由度并联驱动平 台支点位置不同 , 本文中上平台和下平台的各 3 个支点 D10 , D11 , D12和 D00 , D01 , D02分别以 D11 D12 、D01 D02为斜边的等腰直角三角形位置分布. 3 个伸缩支撑杆中 D10 D00垂直固定在下平台上 , D11 D01受球销副的制约 , 可在垂直下平台 、且穿 过 D00 D01的平面内绕 D01支撑点转动 , 同时还可 沿垂直于 D00 D01的方向转动 , D12 D02由于受销轴 副的制约 ,只能在垂直下平台 、且穿过 D00 D02 的 平面内绕 D02支撑点转动. 上平台在 3 个伸缩支 撑杆的运动过程中可作沿 z 的平移运动以及绕 x 轴 、y 轴的空间旋转运动 ,并且当 3 个伸缩支撑杆 各自的长度一定时 , 可唯一确定上运动平台的空 间位置姿态. 这样 ,本文中的并联驱动平台机构可 做 x 轴平移和分别绕 x 轴 、y 轴旋转 3 种自由度 的运动.
一种三自由度并联驱动平台机构的 空间位置解算和分析
姜广文1 ,汪滨琦1 ,崔宝成2
(1. 哈尔滨工程大学 自动化学院 , 黑龙江 哈尔滨 150001 ; 2. 哈尔滨工程大学 机电工程学院 , 黑龙江 哈尔滨 150001)
摘 要 :介绍了一种三自由度并联驱动平台机构的空间结构和空间运动姿态的位置解算 ,并分析了该结构平台 在运动过程中所产生的附加运动. 该三自由度并联驱动平台的三个支撑点采用直角三角形分布 ,经推算 ,和其 它三点支撑的并联驱动平台相比 ,该三自由度并联驱动平台结构只产生绕 z 轴的附加运动 ,具有结构简单 、易 实现的优点. 计算表明 ,所产生绕 z 轴的附加运动和独立的运动变量相比 ,其值很小. 在实际应用中可明显提高 运动的仿真效果. 并且 ,应用的算法具体 、简单快捷 ,可提高解算速度和微机实时控制中的反应速度 ,具有直接 的应用价值. 关键词 : Stewart 平台 ;三自由度 ;并联驱动平台 ;空间位置姿态 ;直角三角形 中图分类号 : TP242. 2 文献标识码 :A 文章编号 :1006 - 7043 (2002) 04 - 0073 - 04
一种三自由度并联机器人机构的运动学分析
"
、
= ” _、 O 一
+ fm
九h ,0 一, 一
=
0
将 式 ( ) ●入 式 (, O O Z
/
C
的 3个 方 程 , 进 一 整 理 后 写 成 式 ( ) 形 式 : 步 + 7的
器人 是一 种 很 有 实 用 前 景 的 机 器 人 , 也 越 来 越 多 地 引起 人们 的 汴 意 。 ■ 自 由度 并 联 机 器 人 包 括 平 向三 自 由 度 并 联 机 器 人 , 球 面 三 自由度 并 联 机 器 人 和 空 间 三 自由度 并联 机 器 人 。 球 向 自由度 并 联 机 器 人 能 够 实 现 运 动 平 台 三维 转 动 , 是 一 利 角 台 形 式 , 由静 角 台 、 动 角 台和 三 组 具 有 一 定 弧 度 的连 杆 架 和 连 杆 构 成 ,各 联 接 处 均 采 用 转 动 副 。 这 种 机 构 结 构 复 杂 、 设 计 困
维普资讯
一
种 三 自由度 并联 机 器 人机 构 的 运 动 学 分 析
Ki e n ma is An lsso No e 一 F Pa a l l a i u a or t ay i f c A v l DO r l np lt 3 e M
(
。
,
y
。
,
0) 的 绝 对 坐 标
( / 、 3 2L ( ,,) ( / √ /,) 2x R/ ,) / ) , 一 0L , 2一 3 2【 ) 】 q X ,Y ,0) 对 Cx z的 坐 标 ,( Y
度并联机器人方面 的研究 已比较深入和成熟。三 自由度并联机
难 。
叮( ,) q (, 24 1 L 口(r 2一 3/ ) l‘)) 一‘ 3‘ ,), 一 / √ , 20 ,LL , / / )
三自由度并联机器人运动学分析与研究
吴培栋,张振久,龚爱平
( 深圳信息职业技术学院 智能制造与装备学院,深圳 518172)
摘摇 要:主要对三自由度 Delta 并联机器人进行逆运动学研究。 首先在 Delta 机器人的动平台和静平台上分别建立 动坐标系和静坐标系,根据其动静平台及各运动支链的结构特征建立其矢量方程,并由此推导其运动学方程,进一 步推导出 Delta 并联机器人的逆运动学方程。 逆运动学方程的两个解分别对应两种不同的机构构型,本文选择其中 的一种构型作为研究对象。 最后通过 MATLAB 和 ADAMS 联合使用对一个算例进行仿真分析,其仿真结果与预期 结果一致,表明本文所采用的方法是可行的、正确的。 关键词:并联机器人摇 Delta 机器人摇 逆运动学分析 中图分类号:TP242摇 摇 摇 摇 摇 文献标识码:A摇 摇 摇 摇 摇 文章编号:1002-6886(2020)05-0023-04
Kinematic analysis of three-degree-of-freedom parallel robots
WU Peidong,ZHANG Zhenjiu,GONG Aiping
Abstract:In this study we carried out inverse kinematic analysis of the three-degree-of-freedom Delta parallel robots. First鄄 ly,the static coordinate system was established on the fixed platform,and the moving coordinate system was established on the moving platform. Vector equation was built based on the characteristics of the fixed platform,the moving platform and the limbs. Kinematic and inverse kinematic equations were then derived from the vector equation. The two different solutions of the inverse kinematic equation corresponded to the two different configurations of the Delta robot,and one of them was select鄄 ed as the study object. Finally,an example was simulated by using MATLAB and ADAMS,and the simulation results were consistent with the predicted results,which verified the correctness and effectiveness of the method. Keywords:parallel robots,Delta robot,inverse kinematic analysis
一种三自由度并联机器人运动性能分析
2 0 1 3年 6月
北华航天工业学 院学报
第2 3 卷
¥ 3 ={ o , 1 , 0 , 0 , 0 , Z 3 }
的三个独立位姿参数与三个非独立位姿参数 间的映
射关 系 。
¥ 4 ={ 0 , 1 , 0 , 0 , 0 , Z 4 }
¥1 5 ={ 0 , 1 , 0 , 0 , 0 , Z 5 } 3 5 1 6 ={ 0 , 1 , 0 , 0 , 0 , Z 6 }
关键词 :并联机器人 ; 自由度 ;运 动学
中 图 分 类 号 :T P 2 4 2 文 献 标 识 码 :A 文 章 编 号 :1 6 7 3—7 9 3 8 ( 2 0 1 3 ) 0 3 —0 0 1 3 —0 4
0 引 言
平台的运动特性。
三 自由度并 联 机构 可 以在一 定程 度上 满足 工业
¥ 2 4 ={ 0 , 1 , 0 , 0 , 0 , Z 4 } ¥ 2 5 ={ 0 , 1 , 0 , 0 , 0 , Z 5 }
图 3 坐 标 系 的建 立
为了 分析 的方便 , 建 立 如 图 3所 述 的 坐 标 系 , 坐 标 系 的原 点 0和 P分 别 和静 平 台和动 平 台的 中
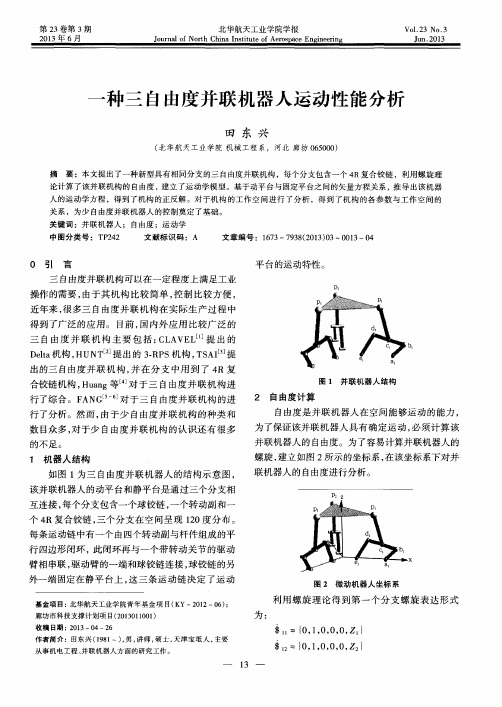
的不足 。 1 机 器人 结构
Байду номын сангаас
图 1 并 联 机 器 人 结 构
2 自由度计算 自由度 是并 联 机 器人 在 空 间 能 够运 动 的 能力 , 为了保证 该并 联 机 器人 具 有 确 定 运 动 , 必 须计 算 该
并 联机 器人 的 自由度 。为 了容 易计算 并联 机器 人 的
第2 3卷第 3 期
一种新型空间三自由度并联机器人的运动学与工作空间分析

在该新型并联机器人上取分支坐标系时,采用 与上面分析闭环子链时同样的坐标系,考虑到该并 联机器人的对称性,坐标系z轴与Y轴在上下平台
度并联机器人机构只有很少的几种.包括Clavel在 1988年将4S平行四边形机构用于并联机器人的分 支中,设计出的著名的DELTA三自由度移动机 构Ⅲ;Tsai在1996年提出的三自由度移动并联机 器人机构口],其分支中用到了4R平行四边形机构; 这类机构都可以归属于含有闭环子链的并联机构. 其他对于三自由度并联机器人的研究有:Tsai和 Kim在2003年研究了空间3一RPS并联机器人的运 动综合口].Gregorio讨论了三自由度并联机构分支 的柔性对平台位形的影响H].Badescu研究了 3一UPS并联平台机构工作空间的优化问题[5].黄真 1995年提出了数种新型三自由度立方型并联机器 人¨J.刘辛军2005年提出一种具有一转动和两移 动的三自由度新型并联机器人[7].
(7)
式中(Z,优,,z)和(z,优,一7z)分别为并联机构中分 支连接上下平台的相应转动副轴线方向,(z,Y,z)、 (z,Y,一z)分别为并联机器人中分支连接上下平 台的相应转动副中心坐标.求其反螺旋可得并联机 器人的分支约束螺旋系为:
¥。=(跏一zl yn一删0;0 0 0)(8)
上式表明,每个分支对并联机器人动平台都施加一 个过闭环子链各转动副轴线交点,且在上下平台对 称平面内的约束力,其方向由分支连接上下平台的 转动副轴线的方向数和坐标确定.当上下平台平行 时,约束螺旋为:
三自由度并联分拣机器人的动力学建模与仿真
包 装 工 程第45卷 第3期 ·218·PACKAGING ENGINEERING 2024年2月收稿日期:2023-03-27基金项目:国家青年科学基金(E51505124);河北省自然科学基金(E2017209252);河北省高等学校科学技术研究重点项目(ZD2020151);唐山市机器人机构学理论基础创新团队项目(21130208D );唐山市基础研究项目(23130201E );华北理工大学重点科研项目(ZD-YG-202306-23);华北理工大学专业学位综合改革项目(ZD18010223-03)三自由度并联分拣机器人的动力学建模与仿真崔冰艳,桂小庚,曾鸿泰,李贺(华北理工大学 机械工程学院,河北 唐山 063000)摘要:目的 针对自动化生产线上分拣机器人的动力可控性问题,提出一种2UU-UPU 三自由度并联分拣机器人,以提高分拣的精度可控性。
方法 分析该机器人的机构自由度,以及各参数之间的关系,基于闭环矢量法建立并联机构的运动学逆解模型;利用拉格朗日动力学方程推导该机器人的动力学表达式,并进行数值计算,采用Matlab Simulink 和Adams 进行动力学联合仿真,对理论值和仿真值进行误差分析。
结果 揭示了该机器人动平台的运动规律,得到了驱动力矩曲线,理论值与仿真值的误差较小,3个驱动力矩的最大误差分别为0.379%、0.283%、0.146%。
结论 通过验证可知,该机构具有较好的动力学特性,这为后续电机的选型和精准控制奠定了基础。
关键词:2UU-UPU 并联机构;分拣机器人;动力学;分拣精度中图分类号:TH112 文献标志码:A 文章编号:1001-3563(2024)03-0218-08 DOI :10.19554/ki.1001-3563.2024.03.025Dynamic Modeling and Simulation of a 3-DOF Parallel Sorting RobotCUI Bingyan , GUI Xiaogeng , ZENG Hongtai , LI He(College of Mechanical Engineering, North China University of Science and Technology, Hebei Tangshan 063000, China) ABSTRACT: Aiming at the dynamic controllability of sorting robots in automatic production lines, the work aims to propose a 2UU-UPU 3-DOF parallel sorting robot to improve the accuracy and controllability of sorting. The relationship between the degrees of freedom and various parameters of the robot was analyzed, and an inverse kinematics model of the parallel mechanism was established based on closed-loop vector method. The dynamics expression of the robot was derived using Lagrange dynamics equations, and numerical calculations were performed. The dynamic joint simulation of the robot was performed using Matlab Simulink and Adams, and the error analysis of the theoretical and simulation values was performed. The motion law of the robot's moving platform was revealed, and the driving moment curves were obtained. The error between the theoretical value and the simulation value was small, with the maximum error of the three driving torques being 0.379%, 0.283%, and 0.146%, respectively. It is verified that the mechanism has good dynamic characteristics, laying a foundation for the subsequent motor selection and precise control. KEY WORDS: 2UU-UPU parallel mechanism; sorting robot; dynamics; sorting accuracy随着生产线的智能化发展,产品的分拣已进入一个新阶段,特别是分拣机器人的研发,为生产线上的产品分拣注入了新的活力。
一类3自由度空间并联机器人机构的设计及分析
( n n Unv ri fS in e& T c n lg ,L o a g He a 7 0 3,C ia He a iest o ce c y e h oo y u y n n n4 1 0 hn )
Absr t A n v ls ta r l lm a pu ao ih hre i a a t a o s o a i a a sx b r tac : o e pailpaal ni lt r w t t e l e ne r c u t r ,c nti ng a pln r i・ a n
c o e l o i n t i b ,i pr po e is l l s d—o p n o e of i l s m s s o s d f ty,b s d o h i l pe ‘ h i ni t o y. r a e n t e snge o n c a n u t he r Th o ‘ e m v
De i n a n l ss o m iy o Do Sp ta r le a pu a o s sg nd A a y i fa Fa l f3- F a i lPa a llM ni l t r ZHANG n bn, DANG Ya — i Yu— o g gn
并联机器人设计论文

并联机器人设计论文摘要:并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。
这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。
关键词:三自由度并联机构;并联机器人;设计;1.课题国内外现状及研究的主要成果少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。
研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授 Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。
在Hunt之后,不断有学者提出新的少自由度并联机构机型。
在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。
clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。
Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。
在 Tricept并联机床上采用的构型是由 Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个内副驱动支链并由导向装置约束动平台。
Tsai通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。
并联机器人设计论文
并联机器人设计论文摘要:并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。
这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。
关键词:三自由度并联机构;并联机器人;设计;1.课题国内外现状及研究的主要成果少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。
研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授 Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。
在Hunt之后,不断有学者提出新的少自由度并联机构机型。
在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。
clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。
Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。
在 Tricept并联机床上采用的构型是由 Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个内副驱动支链并由导向装置约束动平台。
Tsai通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
综上分析,当动平台参考点P的位置(砟、yP、 zP)已知,0.、0:、0,均有唯一解,即运动学的逆解唯 一。而中间变量卢¨卢:、JB,均有2个解,卢:、膨、例 的解分别与卢”卢:、p,有关。
万方数据
894
机械科学与技术
万方数据
892
机械科学与技术
第27卷
设计解耦并联机构…。目前,也多是针对某一特定 解耦并联机构进行的研究,解耦构型的研究方法也 不尽相同。由于运动副是机构组成的基本单元,不 同的运动副可组合成具有不同解耦特性的并联机 构,因而,文中从运动副分析人手,在平动并联机构 解耦构型研究的基础上,对一种完全解耦的三自由 度平动并联机构‘10,11]进行了构型、自由度和运动学 分析,该机构由3个正交分布的支链组成,机构的运 动副均为转动副,机构动平台在x、y、z这3个方向 平动解耦。最后,基于机构的运动解耦特性,介绍了 该机构在一种新型4.DOF串并联机器人试验样机 的应用。这为该并联机构的动力学分析、有效控制 和推广应用等方面提供了一定的理论基础。
Key words:3-DOF parallel mechanism;configuration;kinematics;decoupling
机构解耦程度越高,其运动学、动力学分析越简 单易解,可极大简化机器人的控制与轨迹规划问题。 从机器人机构的工作性能考虑,追求输入与输出变 量问的解耦特性是构型综合的目标之一川。因而。 对解耦并联机构的研究也是并联机器人研究领域内 的一个热点。如R.Clavel口1提出的一种4自由度 Delta并联机器人机构;Lallemand等¨1提出的一种6
只取0或1,当元索取1时,表示有沿该方向的移动 或转动自由度,当该元素为0时,表示没有沿该方向
的移动或转动自由度。故根据式(1)可以确定该并
联结构各个支链的运动为
¥l=[1,1,1,1,0,0]
(2)
¥2=[1,1,1,0,1,0】
(3)
¥3=[1,1,1,0,0,1]
(4)
将式(2)一式(4)代人式(1)可得并联机构的运动为
¥=¥I n¥2 n¥3=[1,1,1,0,0,0]
(5)
故可知该并联机构的自由度数为3,即为三平
动并联机构。
3运动学分析 3.1坐标系的建立
如图3所示,将固定坐标系。一粕n乃设定在机 架的左上方,动坐标系P-x。Y。钿设置在动平台的几 何中心上。m。,(i=1,2,3)代表M。。肘:(i=l,2,3) 的杆长,其余各参数的设定参见图3所示。
第27卷
3.3并联机梅运动学的正解分析 位置工E解是机器人的结构参数和输人运动副的
角位移已知时,求并联机器人动平台参考点P点在 霹定坐标系巾豹位置(耳、巧、Z尹)。
收稿日期:2007一cr7—23 基金项目:国家自然科学基金项目(50475055)资助 作者简介:郑建男(1978一).博士。研究方向为机器人技术与应用。
Ic封装设备与工艺。zjy_207@163.coin
自由度2-Delta并联机器人机构;W.K.Kim等”1提 出的一种3RCC并联机构;在Gosselin转动副共点 的球面并联机构基础上。吴伟国等"1提出了一种具 有解耦特性球面并联机构;金琼和杨廷力等¨’¨分 析了一类新型三平移解耦并联机构;杭鲁滨等¨’基 于拓扑解耦判定准则,构造了一种新型的三平移一 转动解耦并联机构;李惠良等一1基于机构结构组成 理论,综合出了一类完全解耦的一平移两转动的3 自由度并联机构。具有解耦特性的并联机器人因其 易于控制与轨迹规划而深受欢迎,但对它的研究还 未形成系统化的理论,没有一套实用准则来判别和
Degree-of-Freedom Parallel Decoupling Mechanism
Zheng Jianyon91,Li Weimin2,Shi Jinfeil,Wang Wenkail’3
(1 Department of Mechanical Engineering。Southeast University,Nanjing 211189;
固N球
(a)PPP支链
(b)7R支链
(c)变形7R支链
图2 3种不同的支链形式
由3个图2(b)所示的7R支链即可组成三自由
度的并联解耦机构,机构简图如图3所示,该并联机 构具有以下几个特点:
(1)各支链的运动副均为转动副,结构简单。 (2)可选用伺服电机驱动,控制方式简单。 (3)与定平台相连的运动副在空间正交分布, 各分支的运动分别控制一个方向的移动。 (4)与动平台相连接的3个转动副的轴线正交 分布,克服了一般并联机构的运动耦合缺陷。 (5)具有运动解耦、力解耦、工作空间连续、结 构和加工装配工艺简单等特点。
(2)求解中间变量 fit=arctan-UV.I-4U2 V2--(V2-D2)(U2_32)
(10)
乙一ZltcosOl—it2co啦I
卢跏2=arcatanr_—Uc,Vtt..a1迎n.4≮U12零V等,2_(写等Vt2_D霉唱,2)(U,2_D,2) 卢:=arctan
耳一r—Z12si邮I
一卢。
(11) (12) (13)
f13=arcta盥型譬雾笋巫互(14)
一13Icos03 —132CO啦3
JB;=arctan
一卢3
口04一.XP—r—Z32siBp3
式中:
(15)
(口“-XP—r)2+(yP一13tcos03)2+霹2一z;3
D”= 2232
£,=yP—r;
U’=XP—r;
U”=口¨一XP—r;
万方数据
第7期
郑建勇等:一种三自由度并联解耦机构的构型与运动学分析
893
妇
图3三自由度并联机构简图
该并联机构动平台上的3个转动副的坐标如下
r
口oI+fllsinol+rz13cos(卢:+JBl)
I_
L ZIIcosOI+it2CO印I+113sin(fl:+卢I)J
1 平动解耦构型方法 平动并联机构的解耦构型研究的基本思想是:
一个直线运动输入与垂直于该输入的平面上的运动 无关。其原理如图1所示。图l中,移动副P作为 输入确定平面副在z坐标轴方向的位置,而平面副 F沿髫、Y方向的运动与移动副P的输入无关。因 此,用图1(a)所示运动简图作为支链(er)。可以组 成输入输出一一对应运动解耦平动并联机构。
L
一口03+13I sin03+m∞
J
阳
㈤
3.2并联机构运动学的逆解分析
运动学的逆解即运动学的逆问题,是当并联机 器人的结构参数和动平台参考点P的位置(砟、酢、 乙)已知时,求各个分支输入运动副摆角的大小。
(1)求解输入变量
砟一moI一口ol
0l=arcsin
p2=arcsin
(9)
03=arcsin 13I
摘要:针对一种具有运动解耦特性的三自由度并联机构,首先介绍了平动解耦构型的基本思想,
并采用了一种基于运动副的机构构型方法。对机构进行了构型分析。该机构由3个正交分布的支
链组成,机构的运动副均为转动副,其动平台在X、y、z这3个方向平动解耦。对机构进行了自由
度和运动学分析,推导了机构的运动学正/反解、输入/输出的速度和加速度,验证了机构的运动解
靛,= 略铽帮
(a)P和F的运动简图(b)平面/gtJF(3R,PPR,RPR)(c)移动副P(4R) 图1机构解耦的构型研究
通过对移动副P和平面副F进行构型综合研 究,可以设计出运动解耦三自由度平动并联机构的 各种类型。平面副可以有各种构型,图1(b)给出了 3种典型的构型形式:RRR、PPR和RPR(其中尺表 示转动副,P表示移动副)。图1(c)给出了移动副 P的一种替代形式,由4个转动副组成。将平面副 F和移动副P进行不同的组合,可以组成并联机构 不同的支链形式,如图2所示。
耦特性。最后,基于机构的运动解耦特性。介绍了该机构在一种新型4-DOF串并联机器人试验样
机中的应用。
关 键词:三自由度并联机构;构型;运动学;解耦
中图分类号:TP242.2
文献标识码:A
文章编号:1003-8728(2008)07-0891-05
Configuration and Kinematics Analysis of a Three
2机构的自由度分析
自由度分析是并联机器人运动学分析的基础。 分析并联机构自由度的一般方法,需要考虑机构各
个环路的拓扑结构、杆件数量以及关节类型和机构
自由度之间的关系等。此处,采用并联机构构型原 理对并联机构进行自由度分析。并联机构构型原理
的定义为:并联机构末端的运动等于组成该机构的
各个分支支链运动的交集¨21,即
¥=¥I n¥2 n¥3,…,¥.
式中:¥为并联机构末端执行器的运动。¥。为支链
i的运动(i=1,2…,疗)。设支链瞬时运动¥。为 pltlker坐标,即
¥‘=[Fi,ll,‘]=[t,“,lIyi,t,莉,钾,;,埘一,埘l‘]
(1)
式中:t,巾%,%表示支链f输出构件的三维移动;
"扪l‘『“。埘“表示支链i输出构件对应于欧拉角a,p,y 的三维转动。并且约定¥;为特殊的运动,其元素
2
School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130; ’Department of Mechanical Engineering,Nanjing Institute of Industry Technology,Nanjing 210016) Abstract:One type of three degree-of-freedom(3一DOF)translational parallel decoupling mechanism’s configuration is studied,which has been obtained from the movable pair-analysis method.The mechanism has three orthogonal dis· tributional branch-chains;all its movable pairs are rotational joints;and its movable-platform has X,Y,Z three translational decoupling directions.Its freedom and kinematics are also studied according to the parallel mechanism characteristics.The direct and inverse kinematics are solved,and its input/output speed and acceleration are deter- mined and they confirm its decoupling movable characteristics.Finally,in view of the mechanism’s movable decou- pling characteristics,the mechanism’s application to a novel 4-DOF series·parallel robot prototype is presented.