PiD软件介绍
画PID图,用什么软件比较好?
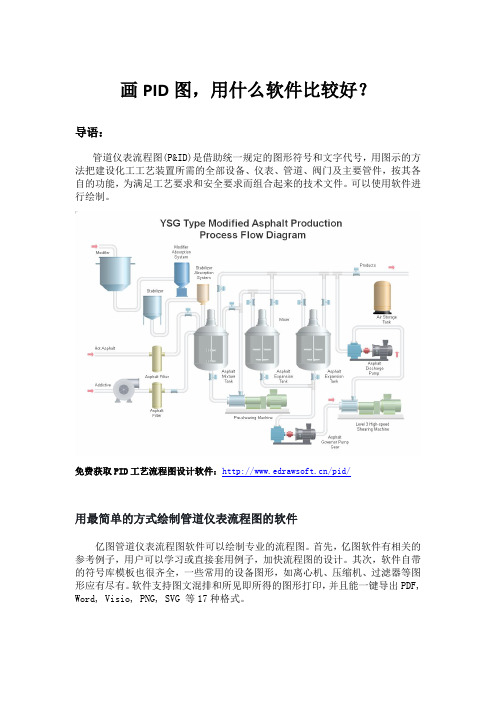
画PID图,用什么软件比较好?导语:管道仪表流程图(P&ID)是借助统一规定的图形符号和文字代号,用图示的方法把建设化工工艺装置所需的全部设备、仪表、管道、阀门及主要管件,按其各自的功能,为满足工艺要求和安全要求而组合起来的技术文件。
可以使用软件进行绘制。
免费获取PID工艺流程图设计软件:/pid/用最简单的方式绘制管道仪表流程图的软件亿图管道仪表流程图软件可以绘制专业的流程图。
首先,亿图软件有相关的参考例子,用户可以学习或直接套用例子,加快流程图的设计。
其次,软件自带的符号库模板也很齐全,一些常用的设备图形,如离心机、压缩机、过滤器等图形应有尽有。
软件支持图文混排和所见即所得的图形打印,并且能一键导出PDF, Word, Visio, PNG, SVG 等17种格式。
系统要求Windows 2000, Windows XP, Windows 2003, Windows Vista, Windows 7,Windows 8, Windows 10Mac OS X 10.10 +Linux Debian, Ubuntu, Fedora, CentOS, OpenSUSE, Mint, Knoppix, RedHat, Gentoo及更多亿图图示绘制“管道仪表流程图”的特点1.页面布局组件:一键更改背景颜色、自定义添加背景水印、画布设置等功能。
2.主题颜色一键切换:多套主题模板,让流程图换装更方便。
3.丰富的填充功能:单色填充、渐变填充、图案填充和纹理填充等功能。
4.分享按钮:点击页面右上角的分享,让流程图在各类显示屏得以查阅。
5.专业的绘图符号:由专业美工团队绘制矢量图形,供用户免费使用。
丰富的图形符号库助你轻松设计管道仪表流程图内置丰富的模板管道仪表流程图例子管道仪表流程图样式获取更多PID设计软件使用技巧:/software/pid/。
simulink仿真pid案例
simulink仿真pid案例摘要:I.引言- 介绍Simulink软件和PID控制器II.PID控制器原理- PID控制器的基本原理和组成部分- PID控制器在工程中的应用III.Simulink仿真PID案例- 建立PID控制器模型- 设定参数并进行仿真- 分析仿真结果IV.结论- 总结Simulink仿真PID案例的重要性和应用价值正文:I.引言Simulink是一款由MathWorks公司开发的用于模拟和仿真的软件,它可以用于各种领域,如控制系统、信号处理、通信等。
PID控制器是控制系统中常用的一种控制器,它具有结构简单、可靠性高等特点,被广泛应用于工业控制中。
本文将通过一个具体的Simulink仿真PID案例,介绍如何使用Simulink进行PID控制器的仿真。
II.PID控制器原理PID控制器是一种比例-积分-微分(Proportional-Integral-Derivative)控制器,它通过计算控制误差的比例、积分和微分值,得到控制器的输出。
PID控制器由比例单元、积分单元和微分单元三部分组成,其中比例单元用于放大控制误差,积分单元用于消除系统的稳态误差,微分单元用于预测控制误差的变化趋势。
PID控制器在工程中有着广泛的应用,如温度控制、流量控制、位置控制等。
通过调整PID控制器的参数,可以实现对系统的稳定性和响应速度的调节。
III.Simulink仿真PID案例为了演示如何使用Simulink进行PID控制器的仿真,我们建立一个简单的PID控制器模型。
首先,打开Simulink软件,从工具栏中选择“新建模型”,创建一个新的模型。
接下来,从Simulink库中添加以下模块:一个输入模块(用于接收控制信号)、一个比例单元模块、一个积分单元模块和一个微分单元模块。
然后,将这四个模块按照PID控制器的结构连接起来,形成一个完整的PID控制器模型。
在建立好PID控制器模型后,我们需要设定一些参数,如比例系数、积分时间和微分时间等。
PID控制模块简介

PID控制模块1 PID块简 (1)1.1 z (1)1.2 块结 (2)1.3 块 规 (3)2 PID块编辑 (12)2.1 PID输 /¥f设 环 (12)2.2 w输 /f (18)3 PID块执 (21)3.1 PID C/S/MR f w义 (21)3.2 f运 (24)3.3 w逻辑设计 (27)4 PID块 说 (29)4.1 t统 块编辑 (29)4.2 t统 块执 (33)1 PID控制模块简介1.1 概述在工业界使用闭回路控制的系统,一般使用者都希望控制器具有下列优点:1、快速的输出响应(上升时间短)2、高度的稳定性(稳态误差小)3、平滑的控制曲线(没有超越量)4、控制器参数容易调整5、价格低廉因此,PID控制器是最符合这些需求的控制器,而PID也已成为工业界最常用的控制器,广泛应用于温度控制、压力控制、流量控制以及一般常用的连续制程程控系统。
参考图一:过程控制系统软件模块的结构。
WINPC32提供的PID控制模块具有32个多回路死循环控制的设定软件,提供的控制模式包括ON-OFF控制、P控制、PI控制以及PID控制,其控制核心提供上述标准的反馈控制运算法则,将其做成软件模块化连结至控制系统中,使其能与其它WINPC32系统控制软件模块同步运作,控制核心会在固定周期时间内做一次精确反馈控制逻辑运算,以达到实时的闭回路过程控制的功能。
使用者亦可利用呼叫标准C语言的使用者自定逻辑程序(Call C),进行更复杂的反馈控制逻辑运算(如Fuzzy, Neural 控制),将客户本身的专业技术与WINPC32结合来创建客户自己的WINPC32特殊软件。
图一、过程控制系统软件模块结构1.2 控制模块结构图二、PID控制模块结构一、PID控制模块结构组成(参考图二) :1. 过程控制人机接口:提供给使用者操作的控制画面。
2. 控制参数设定:使用者在编辑模式下,可通过系统ON/OFF、PID闭回路输入/出环境模块接口,设定过程控制卡硬件驱动设置和过程控制平台的控制参数、报警极限值、量测补偿、输出饱和等过程控制参数。
关于pid控制著名评述

关于pid控制著名评述PID控制是一种广泛应用于工业控制系统中的经典控制方法,被认为是控制工程领域最为成功的控制算法之一。
PID控制器的设计理念简单直观,易于理解和实现。
在工业自动化领域,PID控制器广泛应用于温度、压力、流量、速度等控制系统中。
PID控制器是由比例(P)、积分(I)和微分(D)三个部分组成的,其基本控制原理是将被控过程的输出与设定值进行比较,计算出控制量的误差,然后通过比例、积分和微分的运算,得到最终的输出控制信号。
其中比例控制部分依据误差的大小进行响应,积分控制部分用于消除系统的常态偏差,而微分控制部分则调整系统的快速响应性能,以减小超调量。
PID控制器的优点之一是其简单性和通用性。
由于PID控制器的设计和参数调整相对容易,并且适用于各种不同的控制对象,使得它成为了工程实践中最为常用的控制算法之一。
此外,PID控制器还具有较快的响应速度、较高的稳态精度和较好的控制性能,使得它能够适应大多数应用要求。
然而,PID控制器也存在一些缺点。
首先,PID控制器的设计需要对被控对象进行系统性的建模与参数估计,而这些过程常常是复杂和耗时的。
其次,PID控制器的参数调整也需要一定的专业知识和经验,否则可能导致系统的不稳定或性能不佳。
此外,PID控制器在处理非线性、时变和多变量等复杂系统时可能效果不佳,需要进行改进和优化。
对于PID控制器的评价可以从不同的角度进行。
首先,从系统性能方面看,PID控制器可以在很大程度上满足工程实际的要求,尤其是对于简单的线性系统。
其次,PID控制器的参数调整较为容易,可以通过经验法则或专业软件进行。
此外,PID控制器还具有较好的稳定性和鲁棒性,即使在控制对象发生变化时仍能保持较好的控制性能。
最后,PID控制器的运算量较小,可以在低性能的处理器上实时运行。
然而,对于一些高级的工业应用,PID控制器的局限性也将显现出来。
例如,在控制非线性系统时,PID控制器可能无法提供良好的控制性能,需要采用更为复杂的控制算法。
PID介绍

下面以PID调节器为例,具体说明经验法的整定步骤: A. 让调节器参数积分系数I=0,实际微分系数D=0,控制系统投入 闭环运行,由小到大改变比例系数P,让扰动信号作阶跃变化,观 察控制过程,直到获得满意的控制过程为止。 B. 取比例系数P为当前的值乘以0.83,由小到大增加积分系数I, 同样让扰动信号作阶跃变化,直至求得满意的控制过程。 C. 积分系数I保持不变,改变比例系数P,观察控制过程有无改善, 如有改善则继续调整,直到满意为止。否则,将原比例系数P增大 一些,再调整积分系数I,力求改善控制过程。如此反复试凑,直 到找到满意的比例系数P和积分系数I为止。 D. 引入适当的实际微分系数D,此时可适当增大比例系数P和积分 系数I。和前述步骤相同,微分时间的整定也需反复调整,直到控 制过程满意为止。 PID参数是根据控制对象的惯量来确定的。大惯量如:大烘房 的温度控制,一般P可在10以上,I=3-10,D=1左右。小惯量如:一 个小电机带一台水泵进行压力闭环控制,一般只用PI控制。P=1-10, I=0.1-1,D=0,这些要在现场调试时进行修正的。
PID控制简介
PID控制器由比例单元(P)、积分单元(I)和微分 单元(D)组成。 比例(P)调节作用:是按比例反应系统的偏差,系 统一旦出现了偏差,比例调节立即产生调节作用用以减少 偏差。比例作用大,可以加快调节,减少误差,但是过大 的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分(I)调节作用:是使系统消除稳态误差,提高 无差度。因为有误差,积分调节就进行,直至无差,积分 调节停止,积分调节输出一常值。积分作用的强弱取决与 积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大则 积分作用弱,加入积分调节可使系统稳定性下降,动态响 应变慢。积分作用常与另两种调节规律结合,组成PI调节 器或PID调节器 微分(D)调节作用:微分作用反映系统偏差信号的 变化率,具有预见性,能预见偏差变化的趋势,因此能产 生超前的控制作用,在偏差还没有形成之前,已被微分调 节作用消除。因此,可以改善系统的动态性能。在微分时 间选择合适情况下,可以减少超调,减少调节时间。此外, 微分反应的是变化率,而当输入没有变化时,微分作用输 出为零。微分作用不能单独使用。
化工设计院用PID图绘制软件
化工设计院用PID图绘制软件.rar
PID, 设计院, 化工, rar, 软件
PID 专业的流程图绘制软件包整合到auto cad 2007
方法很简单:
解压文件打一定的位置如D:
打开cad 2007 >> 工具>>选项>>文件>>支持文件搜索路径再此添加你解压的ctcad和dwg
两个文件>>确定.
在命令行输入menuload>>加载/卸载自定义设置>>浏览>>D:ctcad,选ctcad.cui,打开.>>加
载.
在菜单的最后会出现PID,添加成功了.呵呵.祝你好运!
其他版本的以此类推.
在2004中测试成功!
1、将2个目录添加到支持文件搜索路径中。
工具->选项->文件->支持文件搜索路径,添加
C:\CTCAD和C:\CTCAD\DWG两个路径;
2、增加菜单项。
工具->自定义->菜单->菜单组,加载C:\CTCAD\CTCAD.MNC;工具->自定义
->菜单->菜单栏,在菜单组选择CtCAD,点插入将PID菜单插入到菜单栏中。
此时,AutoCAD的菜单栏中将多出PID菜单一项。
此软件使用了HZTXT.SHX字体,如果没有插入的东西里面的文字不会显示,
字体上网上搜一下,把它放到Autocad安装文件下的fans文件中,如果想偷懒,则把fans 中的任意.SHX复制出来,改名为HZTXT.SHX在复制回fans文件夹,重启CAD。
搞定!。
ardupilot pid 参数
ardupilot pid 参数【原创版】目录1.Ardupilot PID 参数概述2.PID 参数的作用3.PID 参数的调整方法4.实际应用中的 PID 参数设置5.总结正文一、Ardupilot PID 参数概述Ardupilot 是一个开源的自动驾驶平台,其核心技术之一就是 PID (Proportional-Integral-Derivative,比例 - 积分 - 微分)控制器。
PID 控制器广泛应用于自动化控制领域,主要作用是使被控对象的输出值达到期望值,并保持稳定。
在 Ardupilot 中,PID 参数用于调整飞行控制器、电机控制器等模块的性能,以实现精确控制。
二、PID 参数的作用PID 参数分别对应比例(P)、积分(I)和微分(D)控制器,它们各自有不同的作用:1.比例控制器:根据误差的大小调整控制量,使系统响应迅速。
当误差较大时,控制量也较大;误差较小时,控制量较小。
2.积分控制器:根据误差的累积值调整控制量,使系统输出更平滑。
当误差持续存在时,积分控制器会持续增加控制量,以消除误差。
3.微分控制器:根据误差的变化速度调整控制量,使系统具有预测性。
当误差变化速度较快时,微分控制器会减小控制量,以防止系统过冲;当误差变化速度较慢时,微分控制器会增加控制量,以提高系统的响应速度。
三、PID 参数的调整方法PID 参数的调整是一个迭代的过程,需要根据实际系统的响应特性进行调整。
常用的调整方法有:1.Ziegler-Nichols 方法:通过绘制频域响应图,找到系统的截止频率,进而确定 PID 参数。
2.试验法:根据实际系统的响应,不断调整 PID 参数,观察系统的响应,直至满足要求。
3.软件自整定方法:利用计算机程序根据系统的输入输出关系自动调整 PID 参数。
四、实际应用中的 PID 参数设置在 Ardupilot 中,PID 参数的设置可以通过参数配置文件或者编程方式实现。
pid画图培训(2024)

挑战应对
面对未来复杂多变的应用场景和需求,我们需要不断学习和掌握新的技术和方法,如深度学习、强化学习等,以 应对PID控制面临的挑战。同时,我们也需要注重实践经验的积累和总结,不断提高自己的解决问题的能力。
2024/1/24
26
2024/1/24
谢谢聆听
27
3
PID控制器组成与工作原理
01
比例环节(P)
根据偏差的大小进行成比例调节,快速减小偏差。
2024/1/24
02
积分环节(I)
对偏差进行积分,消除静差,提高控制精度。
03
微分环节(D)
预测偏差变化趋势,提前进行调节,提高系统响应速度 。
4
传递函数与数学模型
2024/1/24
传递函数
描述系统动态特性的数学表达式 ,反映输入与输出之间的关系。
运行仿真
配置好仿真参数后,点击运行按钮开始仿真,观察PID 控制器的性能表现。
保存与导出
完成绘图后,选择“文件”菜单中的“保存”选项保存 图形文件;如需导出为其他格式(如PDF、图片等), 可选择“导出”功能进行转换。
10
03 图形绘制技巧与规范
2024/1/24
11
坐标系设置及参数调整方法
2024/1/24
2024/1/24
问题分析 分析压力控制系统中存在的问题 和挑战,如压力波动、控制精度 不足等。
PID图优化 详细阐述PID图的优化过程,包 括控制器参数的调整、控制策略 的优化等,以及优化后的PID图 结构和元素。
21
流量控制系统PID图应用举例
应用背景
介绍流量控制系统的应用 场景和PID控制在流量控 制中的应用。
建立二阶振荡环节数学模型
PiD软件介绍
PiD软件介绍
P i x4D m a p p e r软件介绍Pix4Dmapper软件是由瑞士Pix4D 公司研发,是一款集全自动、快速、专业精度为一体的无人机数据和航空影像数据处理软件。
无需专业知识,无需人工干预,即可将数千张影像快速制作成专业的、精确的二维地图和三维模型。
一、产品特点
1、无需人为干预即可获得专业的精度
PIX4DMAPPER?让摄影测量进入全新的时代,整个过程完全自动化,不需要专业知识,精度更高,真正使无人机变为新一代与业测量工具。
2、完善的工作流
PIX4DMAPPER?把原始航空影像变为用户所需的DOM、DSM和三维模型数据,成果输出多种格式,适用于各种应用行业和软件。
3、自动获取相机参数
自动从影像EXIF 中上读取相机的基本参数,例如:相机型号、焦距、像主点等。
智能识别自定义相机参数,节省时间。
4、自动生成精度报告
PIX4DMAPPER 自动生成精度报告,可以快速和正确地评估结果的质量。
显示处理完成的百分比,以及正射镶嵌和?DEM的预览结果,提供了详细的、定量化的自动空三、区域网平差和地面控制点的精度。
二、输出成果
1、三维点云
影像匹配生成密集点云,为重建对象提供精确位置
2、数字表面模型、数字高程模型
数字模型提供每一个像素的高程值
3、正射影像图
生成高分辨率地图,其原始图像的每一个像素被正确的投影到数字表面模型上,具有精确的地理定位,不会造成透视变形。
4、面积、体积量测
精确的在三维模型上进行长度、面积、体积量测5、等高线
生成地形的简化表示,封闭的轮廓线表示高程6、三维纹理模型
全三维纹理与逼真的质感,完美还原现场实景。
施耐德ULITY PRO软件PID调节浅谈

上、 下限温度来调 节, 能效果 明显 。 实践证明 , 系统节 电效果好 , 本 产品性 能可靠, 还可延 长电机 、 触器以及机械 附件 的使 用寿命 , 接 可带来
较 好 的 经 济效 益 。
关 键 词 : 央 空调 ; 能 ; 术 中 节 技
药 品质量 的优劣与生产环境 的好坏有着直接 的关 系, 而空调 系 调 ,冷 冻 回水 温 度 小 于 于 设定 最低 温 度 时 无 极 下调 。 统又 是 保 证 环 境 质 量 的 一项 关 键 措 施 , 以空 调 系统 的好 坏 直 接 关 所 22 .冷却水系统的闭环控制 系 到药 品 的质 量 。 制药 企 业 用 的空 调 系 统 包 括 空 气 处 理 机 组 、 送 输 在 冷 却 水 系 统 进 行 改 造 的 节 能 方 案 , 电效 果 很 显 著 。该 方 案 节 管道 、 滤装 置 及 末 端 送 风 装 置 等 。制 药 企 业 用 的空 调 系统 不 仅 要 在保证冷却塔 有一定 的冷却水流出的情况下 , 过 通过控制变频器的输 求把符合 温 、湿度 等参数要求 的空气输送至需要 的房间或区域, 还 出频率来 调节冷却水流量 , 当冷却水 出水温度高 时 , 加大冷却水 流 要满足一定 的洁净度要求 。 本文对 中央空调 中的水泵节能技术进行 量 , 当冷却水 出水温度低时 , 减少冷却水流量 , 实现 中央空凋机组正 研究 。 常工作的前提下达 到节能增效的 目的。 现有的控制方式大都先确定 1 泵 节 能 改 造 的 实 际意 义 水 个冷却泵变频器工作 的最小工作频率 , 将其设定为下限频率并 锁 水泵采用 的是 Y △起动方式 , 一 电机起动 电流是其额定 电流 的 定 , 变频冷却水泵的频率是取冷却管进 、出水温度差和出水温度信 3 4倍 , 动时的机械 冲击 和停泵 时水 垂现象 , — 起 容易对设 备造成破 号来调节。 当进 、 出水温差小于设定值 时 , 频率无极 下调 , 当进 、 出水 坏 。启 动时在强大的 电流 冲击下 , 接触器 、 电机 的使用 寿命 大大下 温差大 于设定 值时 , 频率无极 上调 , 当冷 却水 出水温度高于设定 值 降, 而增加维修费用。 从 选用变频器来对水泵系统进行技术改造 , 可 时 , 频率优先无极上调。 当冷却水 出水 温度低于设定值时 , 按温差 变 以达到节能 , 延长 电机 、 接触器和机械散件 的使用寿命的 目的。 变频 化来调节频率 , 、 进 出水温差越小 , 变频器 的输 出频率越低。经多方 器能在满足中央空调 系统正常工作的情况下 , 根据冷冻水泵 和冷却 实践论证 进 、 出水温差 越大, 变频 器的输 出频率越高 , 现用于冷却水 水泵负载变化而调整水泵 电机的转速 , 使冷却水泵和冷冻水泵作 出 系统 闭环控制 的系列智能变频器采用 同制冷模式 下冷冻水泵 系统 相应调节 。 水泵电机转速下降 , 电机耗 电量就会大大减少 。 流量 的减 闭环控制一样 的控制方式为较好 的方式 。 由于变频器能够很好地控 少与转速减少的一次方成正 比, 但功耗 的减少却与转速减少 的三次 制 中央空调 的冷却 水泵的运行频率 ,因而可 以达 到非常好 的节 能 方成正 比。 效果。在外界负载满载 的情况下 , 本系统依然能够迅速达到上限满 采用变频器控制 电机后 , 电机在起动 时及运转过程 中均无 冲击 载状态 , 因而不会因为节能而影响系统的正常功能。在很 多负载不 电流 , 电机 、 接触器使用寿命均可延长 , 同时采用变频器控制 电机后 满的情况 下 , 冷却水泵 可以运行在低负载状态 , 以达到节能 的目的。 还可避免水垂现象 。 3本 系 统 的优 点 2水 泵 节 能 改 造 的方 案 3I . 安装和改造少 ,仅在 中央空调冷却管 出水端安装一个温度 中央空调 系统通常分为冷冻水 和冷却水两个系统。 根据 国内外 传感 器 , 简单可靠。 最新技术 , 现在水泵系统节 能改造 的方案大都采用变频器来实现 。 3 . 2节能效果更 为明显 。当冷却水 出水温度低于温度 限定值时 , 21 冻 水 泵 系 统 的 闭环 控 制 .冷 采用冷却管进 、出水温度差来调节方式 由温度差来进行无机变速 , 211 冷模 式下 冷 冻 水 泵 系 统 的 闭环 控 制 . 制 . 并 采 温度 上 、 限 温度 来 调 节 , 下 能效 果 明显 。 该方案在保证最末端设备冷冻水 流量供 给的情况下 , 确定一个 3 . 控 性 更 强 。水 泵 变 频 调 速 装 置 对 于 制 药 企 业 不 仅 仅 是 节 3可 冷 冻 泵 变 频 器 工 作 的最 小 工 作 频 率 ,将 其 设 定 为 下 限频 率 并 锁定 . 能 还 可 以增 加 温 度 的可 控性 。 药 企 业 的 空 调 系统 在 生 产 过 程 中所 制 在冷冻水系统回水 主管上的温度传感 器检测冷 冻水 回水 温度 , 再经 需要的冷 冻水是经常随洁净 室内的温度不 同程度调节的 , 而传统 的
SmartPlantPID介绍

工程数据规则管理 Controlled by:
– Rules
Copy Action Symbol None Copy Action Name None At Property Modification The property is not propagated across this relationship.
– Break Labels
• Properties defined by SmartText labels • Requires Break Run
– Inconsistency Indicators
© 2012. Intergraph Corporation. All Rights Reserved.
© 2012. Intergraph Corporation. All Rights Reserved.
设计比较选项
© 2012. Intergraph Corporation. All Rights Reserved.
P&ID 历史数据以及版本管理
© 2012. Intergraph Corporation. All Rights Reserved.
− − − − − − 全球协同设计 应用程序/文档数据共享 规则驱动 设计冲突定义 数据复用 单个数据库
© 2012. Intergraph Corporation. All Rights Reserved.
SP P&ID与AUTO CAD的关键功能对比
SP P&ID
对象有属性 出报表简单快速 集成 版本控制
工程数据规则管理 Controlled by:
Hale Waihona Puke – Rules• Copy function is propagation • New columns handling branches (colinear & non)
SPPID总结

SmartPlant P&ID系统的应用总结1.智能PID设计系统1.1 职能PID设计系统的主要特点SmartPlant P&ID软件(简称SPPID)是一种智能PID设计系统(Intelligent PID),与AutoCAD等非智能PID设计系统相比,智能PID设计系统具有以下特点: z便于数据查询——利用数据库技术,可以快速查询满足条件的数据,不用再翻看众多的文档z提高了数据的一致性——绘制PID的过程也是向数据库输入数据的过程,绘制结束后可以自动生成相应的报表,确保了图纸与报表之间数据的一致性 z便于数据复用——通常智能PID与上下游专业的应用软件都存在接口,智能PID的数据能够被其它应用程序复用,避免了数据再次输入而引入的错误1.2 项目使用职能PID设计系统的主要目标在项目定义阶段,业主和PMC管理团队决定采用智能PID系统进行Process Engineering Flow Schema(PEFS),也就是PID图的设计,以便实现以下三个目标: z用一致的设计平台进行PID图的绘制南海项目在业主已有的技术标准体系之上建立了项目标准规范,为了确保这些规范在不同的阶段,被项目的承包商很好的执行。
在PID图方面,项目要求所有的PID图都要用经过统一定制的智能PID系统进行绘制,如果专利商的PID图不符合项目标准,PMC或相应的承包商应根据项目标准将图纸转画为智能PID格式。
z在运行、维护阶段提升设计数据资产的价值南海PMC项目将建立包括业务、工厂自控、工程等模块的数字化工厂,包括智能PID 设计系统在内的应用软件系统是其重要的组成部分。
z实现设计应用软件集成,提高设计质量在工程设计行业,实现设计系统的集成,让下游应用软件复用上游应用软件的数据可以缩短设计周期、保证数据一致性、提高设计质量,从而增进公司的效益。
智能PID系统是整个设计系统中的重要组成部分。
1.3 主要的智能PID系统目前业界主要有以下几种智能PID产品:图形平台 产品名称 出品公司 图形信息与工程数据的关系AutoPlant PID Bentley-Rebis 分离 AutoCADMicroStaion PlantSpace PID Bentley 分离 AutoCADMicroStaion VANTAGE Plant Engineering PID AVEVA 分离 AutoCADPDS 2D Intergraph 分离 MicroStaion SPPID Intergraph 结合 内置图形信息是指构成PID图的图形元素信息,如直线的起点、终点坐标,线型,图层等。
工艺PID是什么,用什么软件画呢?

工艺PID是什么,用什么软件画呢?导语:工艺流程图PID,是用各种工业标准的符号,形象化描述产品从原料到成品的制造与生产过程中所需完成的所有工作与工艺。
一般来说,绘制PFD、P&ID,相关专业从事人员都是运用Visio或者AutoCAD、PIDCAD这些软件。
但其实国内也有更好用的绘制软件。
免费获取PID工艺流程图设计软件:/pid/最佳的工艺流程图制作软件——亿图图示亿图图示是一款跨平台(Windows、Mac、Linux)、多功能、同时支持云储存、分享功能的专业图形图表绘制软件。
亿图图示同时支持绘制工艺流程图(PFD、P&ID)、思维导图、电路图、组织结构图、建筑平面图、计算机网络、信息图等200种以上的图形图表,是一款真正功能强大的制图软件。
软件提供矢量基础的12000个以上的符号、800个以上的模板和例子以供用户绘图使用。
同时,亿图图示也支持多种类型文件的导入导出,导入如Visio、SVG,导出如Visio、SVG、HTML、JPG、PNG、PDF、Office文件等等。
工艺流程图绘制步骤详解1、首先打开我们的绘图神器亿图图示,然后点击“新建”,找到工业自动化分类,之后我们就能看到有很多模板可以选择,只要用鼠标点一下你看上的模板就行。
要是没有心仪的模板,那咱就自己创建一个新的,点击右侧“创建”一个新的空白画布。
2、进入画布之后,就要开始画图了,软件提供了大量的矢量符号在左侧的符号库中,需要使用的时候直接用鼠标拖进画布即可。
包括管道、阀门、设备、按钮等等几乎要用的符号都有,而且每个符号下方都有相应的注释,也无需担心会错误使用的问题,你要做的就是将这些设备管道排列连接起来就行。
3、等图形都排列好了,选择上方的“文本”按钮,即可在画布内输入文字,然后再依次添加标题、注释、工序描述等等即可。
如果想让图形更加美观,也可以在软件上方对符号等进行样式修改。
4、最后,将我们画好的作品保存导出就行,亿图图示支持将导出为图片、PDF、Html、Office等格式,选择对应的格式,就能进行导出。
PID控制系统交互式虚拟仿真软件的设计

PD控 制 是 控 制 类 课 程 如 “ 程 控 制 ” “ 算 I 过 、计 机控 制 ” 重 要 组 成 部 分 , 且 目前 在 工 业 生 产 过 的 而
计 算机 虚 拟仿真 软件 的使用 能够 改变 传统 的实 验方 式 ( 由教 师 给 出 已经 调 试 好 的实 验 参 数 , 生 进 即 学 行 验证 实 验 ) 。这 样 学 生 能 够 自主 选 择 参 数 , 握 掌 整 个控 制 系统设计 过 程 J 。基 于 以上 考虑 ,  ̄ N 我 i ' J 用 Vsa C +( C) i l + V 软件 开发 平 台 , aa/ i l k u M tbSmui l n 仿 真工具 箱 以及 M tb R W 实 时 工 作 间 , 发 了 al / T a 开 PD控制 系统 虚拟 仿真 软件 。该 软件 不 仅充 分 考 虑 I 了 PD控制 相关 内容 , I 包含 了基 本 PD算 法 、I I PD算 法改 进 、I 数整 定等 实验 内容 , PD参 而且用 户 界 面 良 好 , 有 良好交 互 功 能 和 仿 真运 算 功 能 。通 过人 机 具
帮助学 生更 直观地理解 PD控制 的物 理意义和工作原理 ,培养 了学生 的研究能力和综合应用能力 。 I
关 键词 :Vsa C + iuik I i l + ;S l ;PD控制 ;交互式 ;虚拟仿真 u m n 中图分 类号 :P 1 T3 1 文献标 识码 : A d i1 .9 9ji n 17 — 35 2 1.5 0 1 o: 36 /.s .6 2 4 0 .0 10 . 2 0 s
k n s o i lt n e p rme ta o t I o t l a e d n . I h l t d n st i cl o r h n i d fsmu ai x e i n b u D c n r n b o e t e p su e t o d r t c mp e e d o P o c e y
和利时优化控制方案3--HOLLiAS PID增强型自整定PID软件
【概述】和利时公司自1993年创建,发展至今,在工业控制领域已取得了许多骄傲的成绩。
公司一直专注于工业控制领域,研发出了许多比较先进的工业控制产品,以及为客户提供专业的工业控制解决方案。
公司研发和工业团队在工业控制以及优化控制领域有着深厚的技术积累和丰富的现场经验,并结合高校在优化控制领域的理论研究成果,从而为客户提供专业的工业现场PID控制器参数整定优化解决方案。
用户操作人员或过程工程师可以利用和利时公司自主研发的HOLLiAS PID增强型自整定PID软件有效解决工业现场控制系统中PID控制器参数的优化整定,提高了工业现场基础PID控制回路的运行效果,从而简化了现场工业系统的工程调试和运行维护工作,实现生产企业长期“安全、稳定、连续、自动、优化”运行,达到“改进生产、节能增效”之目的。
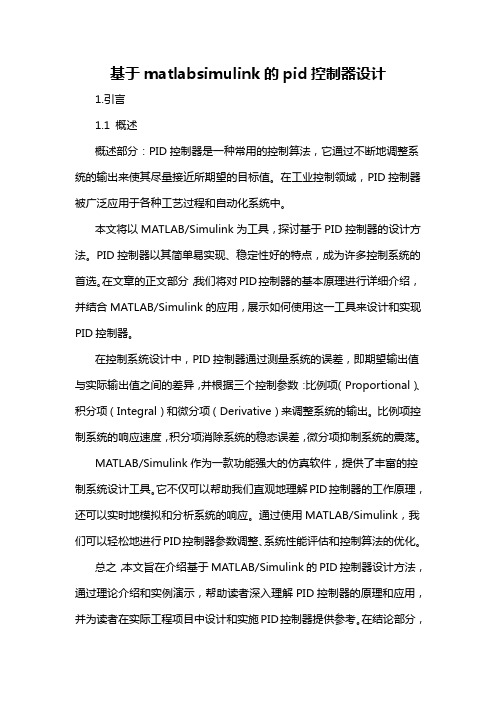
【功能特点】将数据采集、数据预处理、模型辨识、PID参数整定、PID参数转换集成在一起;友好的界面操作,简单有效;一种半在线运行软件,对硬件需求低;PID参数整定流程采用流水线式方式,简单明了;采用先进的模型辨识技术,基本上可以辨识描述工业系统的各种传递函数模型结构;采用先进的PID参数整定算法,可以满足用户不同性能需求下的PID参数;在PID整定界面,提供了离线仿真的闭环控制响应曲线,并提供控制性能,检验其需求是否满足。
提供了将标准PID控制器参数转换为实际工业现场控制系统中PID参数的转换功能,可以满足不同厂家的PID控制器结构的参数转换。
【应用领域】HOLLiAS PID增强型自整定PID软件适用于工业过程控制领域绝大多数PID控制回路的参数优化整定。
【典型应用案例】HOLLiAS PID增强型自整定PID软件已在化工行业中有了初步的应用。
1.环己醇脱氢工艺中的萃取塔塔釜液位串级控制主控制器副控制器整定前结果整定后结果应用效果:在副回路流量控制对象存在严重干扰下,副回路能够快速跟踪达到稳态;串级主回路液位对象能够快速跟踪设定目标,而且控制器输出浮动很小;2. 环己醇脱氢工艺中的烷蒸馏塔塔釜液位串级控制应用效果:在副回路流量控制对象能够快速跟踪对象,并且最终稳定,减小了现场控制阀大的振荡动作,提高了其寿命;串级主回路液位对象能够快速跟踪设定目标; 整定前结果整定后结果 副控制器主控制器。
基于matlabsimulink的pid控制器设计
基于matlabsimulink的pid控制器设计1.引言1.1 概述概述部分:PID控制器是一种常用的控制算法,它通过不断地调整系统的输出来使其尽量接近所期望的目标值。
在工业控制领域,PID控制器被广泛应用于各种工艺过程和自动化系统中。
本文将以MATLAB/Simulink为工具,探讨基于PID控制器的设计方法。
PID控制器以其简单易实现、稳定性好的特点,成为许多控制系统的首选。
在文章的正文部分,我们将对PID控制器的基本原理进行详细介绍,并结合MATLAB/Simulink的应用,展示如何使用这一工具来设计和实现PID控制器。
在控制系统设计中,PID控制器通过测量系统的误差,即期望输出值与实际输出值之间的差异,并根据三个控制参数:比例项(Proportional)、积分项(Integral)和微分项(Derivative)来调整系统的输出。
比例项控制系统的响应速度,积分项消除系统的稳态误差,微分项抑制系统的震荡。
MATLAB/Simulink作为一款功能强大的仿真软件,提供了丰富的控制系统设计工具。
它不仅可以帮助我们直观地理解PID控制器的工作原理,还可以实时地模拟和分析系统的响应。
通过使用MATLAB/Simulink,我们可以轻松地进行PID控制器参数调整、系统性能评估和控制算法的优化。
总之,本文旨在介绍基于MATLAB/Simulink的PID控制器设计方法,通过理论介绍和实例演示,帮助读者深入理解PID控制器的原理和应用,并为读者在实际工程项目中设计和实施PID控制器提供参考。
在结论部分,我们将总结所得结论,并对未来进一步研究的方向进行展望。
文章结构部分的内容可以描述文章的整体架构和各个部分的内容大纲。
以下是对文章1.2部分的内容补充:1.2 文章结构本文主要由以下几个部分构成:第一部分是引言部分,包括概述、文章结构和目的等内容。
在概述中,将简要介绍PID控制器在自动控制领域的重要性和应用背景。
pid的作用和应用场景
pid的作用和应用场景
答:pid(比例-积分-微分)控制器是一种在工业控制系统中广泛应用的调节器,主要用于对线性系统进行连续控制。
pid的作用和应用场景包括但不限于:1. 工业生产控制:在工业自动化生产中,pid控制器可用于控制温度、压力、流量等参数,以保证生产质量和效率。
2. 机器人控制:pid控制器可用于控制机器人的位置、速度和力度等参数,以实现精准的操作和控制。
3. 航空航天领域:pid控制器可用于控制飞行器的姿态、高度和速度等参数,以确保航空器的安全和稳定。
4. 汽车控制:pid控制器可用于控制汽车的速度、转向和制动等参数,以提高驾驶安全性和行驶舒适度。
5. 温度控制:pid控制器可用于家庭或商业建筑的温度控制,以提供舒适的室内环境。
在实际应用中,pid控制器通过比例、积分和微分三个环节来对系统进行控制。
比例环节主要负责根据误差信号调节系统的输出;积分环节主要用于消除系统的稳态误差;微分环节则主要用于改善系统的动态特性。
通过这三个环节的协同作用,PID控制器可以实现精确地控制系统参数,达到提高效率、增加稳定性等目的。
PID性能评估与整定软件的开发及应用

PID性能评估与整定软件的开发及应用姜振宇(大庆金桥信息技术工程有限公司,黑龙江大庆163714)摘要:文中讨论了如何使用浙江中控的PID性能评估与整定软件对装置的PID进行整定,并为各PID控制回路设置准确、可靠的P、I、D值,利用装置开车的实际数据,开展PID整定工作,为装置后期平稳运行打下良好的基础。
关键词:PID;性能评估;整定;数据中图分类号:TP273文献标识码:B文章编号:1671-4962(2019)05-0057-04PID performance evaluation and the development andapplication of setting softwareJiang Zhenyu(Daqing Jinqiao Information Technology Engineering Co.,Ltd.,Daqing163714,China)Abstract:This paper discussed how to use PID performance evaluation and setting software from Zhejiang Supcon to set the PID of the device,and set accurate and reliable P,I,D values for each PID control loop,using the actual data of plant startup to carry out the PID setting and lay a good foundation for the stable operation of the plant in the future period.Keyword:PID;performance evaluation;setting;data通过对某化工装置控制回路监测,发现自动控制回路存在PID参数整定不佳导致过程波动大于手动控制的问题,控制回路运行情况不理想[1]。
倍福PID软件库使用手册

BECKHOFF 公司TwinCAT PLC Control PID 软件库使用手册2003 年 11 月 03 日目录1. 简介 (3)1.1 概念 (3)1.2 基本原理 (3)2. 功能块说明 (4)2.1 概貌 (4)2.2 CtrlStandardPID (5)2.3 Ctrl3PointPID (9)2.4 PwmOutput (13)2.5 Ctrl2PointWithHysteresis (16)2.6 Ctrl3PointWithHysteresis (19)3. 示例程序 (22)3.1 PC 示例程序 (22)3.2 BCxxxx示例程序 (24)1. 简介该软件库包含 TwinCAT PLC中实现 PID 控制器功能的功能块,以及脉宽调制信号生成和2 点及 3 点特性曲线功能。
为了适应实际的 PID 调节任务,考虑了一些技术保护,如反复位浪涌和控制值限幅,这些都是实际过程中不可或缺的操作。
控制器的状态由标志指示。
在 3 点特性的 PID 控制器中,模拟量控制值在输出端又增加了正向和反向设定信号的数字输出。
1.1 概念控制器的核心由一个实际的 PID 控制器(PID-T1)组成。
任何控制器都遵循调节原理,并在正向或反向调节带中起调节作用。
因此,对于容器中充满水的水位控制器可作为入口调节器或出口调节器。
限制控制值是可能的,这正如实际的过程情况一样,当控制设备达到其正向或反向限幅值时,应关闭数字控制器的输出。
在控制设备达到其极限位置时触发幅值限制,ARW (反复位浪涌) 测量值被引入到控制器的积分分量。
该 ARW 测量值可以保证调节误差保持为常数,以防止控制器的积分分量继续积分。
否则,当误差信号极性再次发生改变时,控制值要花费很长的时间才能向反方向变化。
控制器的手动启动切换可通过使用一个特殊的初始化程序完成(同步标志),它可保证控制变量的平稳过渡。
当关闭 PID 控制器块的积分分量和跟踪功能(示波器)时,它也是 TwinCAT PLC 软件的成员,在此应特别强调。
PID自动整定软件包及其应用

PID自动整定软件包及其应用
吴刚;薛美盛
【期刊名称】《工业仪表与自动化装置》
【年(卷),期】1998(000)005
【摘要】本文介绍了PID自动整定软件包AtLoop的基本原理和应用。
该软件包括用于各种计算机控制系统PID控制器参数的自动整定,包括3个不同的软件,分别适用于不同的用户和被控对象。
【总页数】3页(P57-59)
【作者】吴刚;薛美盛
【作者单位】中国科学技术大学自动化系;中国科学技术大学自动化系
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.自动化过程控制对PID控制方法的应用及其参数整定策略 [J], 刘晓霞;孙康波
2.相关系数辨识法PID自动整定软件及其工业应用 [J], 孙德敏;杨彬彦
3.相关系数辨识法PID自动整定软件及其工业应用 [J], 梁德刚;刘伟;吴刚
4.控制系统PID参数整定软件包CSLab [J], 胡智奇;王志峰
5.AtLoop PID自动整定软件包—原理与算法 [J], 吴刚;薛美盛;张志刚;孙德敏因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P i x4D m a p p e r软件介绍Pix4Dmapper软件是由瑞士Pix4D公司研发,是一款集全自动、快速、专业精度为一体的无人机数据和航空影像数据处理软件。
无需专业知识,无需人工干预,即可将数千张影像快速制作成专业的、精确的二维地图和三维模型。
一、产品特点
1、无需人为干预即可获得专业的精度
PIX4DMAPPER?让摄影测量进入全新的时代,整个过程完全自动化,不需要专业知识,精度更高,真正使无人机变为新一代与业测量工具。
2、完善的工作流
PIX4DMAPPER?把原始航空影像变为用户所需的DOM、DSM和三维模型数据,成果输出多种格式,适用于各种应用行业和软件。
3、自动获取相机参数
自动从影像EXIF 中上读取相机的基本参数,例如:相机型号、焦距、像主点等。
智能识别自定义相机参数,节省时间。
4、自动生成精度报告
PIX4DMAPPER 自动生成精度报告,可以快速和正确地评估结果的质量。
显示处理完成的百分比,以及正射镶嵌和?DEM的预览结果,提供了详细的、定量化的自动空三、区域网平差和地面控制点的精度。
二、输出成果
1、三维点云
影像匹配生成密集点云,为重建对象提供精确位置
2、数字表面模型、数字高程模型
数字模型提供每一个像素的高程值
3、正射影像图
生成高分辨率地图,其原始图像的每一个像素被正确的投影到数字表面模型上,具有精确的地理定位,不会造成透视变形。
4、面积、体积量测
精确的在三维模型上进行长度、面积、体积量测
5、等高线
生成地形的简化表示,封闭的轮廓线表示高程
6、三维纹理模型
全三维纹理与逼真的质感,完美还原现场实景。