杜博林旋转接头1114系列选型资料
PSS-SRD991中文

(30)
(60)
(90)
无气动继动器
带气动继动 器代码 F.G
2700 (95)
18000 (636)
3500 (124)
24000 (847)
5500 (194)
40000 (1492)
7500 (265)
55000 (1942)
信号 报警................................... 利用通讯方式
防火保护应遵守 EN61010-1,附件 F (或 IEC1010-1)规范
1) 作为服务时的指导 2) 如果导线屏蔽层二端接地,仅适用于 PROFIBUS 或
FOUNDATION 现场总线(Fieldbus)
PDF created with pdfFactory Pro trial version
环境条件
操作条件 ............................ 按 IEC654-1 标准 设备可在 Dx 级场所操作 环境温度 ............................ –40 至 80℃ 相对湿度 ............................ ≤100% 运输和贮存
双作用
200
(7.0)
220
300
(7.8)
(10.6)
PDF created with pdfFactory Pro trial version
3 SRD991
故障处理 在以下情况下的安全位置 —供气故障 ....................... Y1 压力为=零 —电源故障 ....................... Y1 压力为=零 —电气故障 ....................... 可组态为 Y1=零或停
杜博林旋转接头原理
杜博林旋转接头原理
杜博林旋转接头是一种通过其特殊的结构来实现柔性传动的装置。
其主要原理是通过两个相互嵌套的球体,使得旋转轴可在任意方向上进行转动。
杜博林旋转接头的原理可以简单归纳为以下几点:
1. 两球嵌套结构:杜博林旋转接头的核心部分是由两个球体组成,一个内球和一个外球。
这两个球体之间的接触面是球面形状,使得内球可以在外球内部自由旋转。
2. 接触点滚动:由于两球之间的接触面是球面形状,当旋转接头转动时,内球和外球之间的接触点会随着转动的不同位置发生变化。
接触点在两球之间滚动,而不是滑动,从而减小了摩擦和磨损。
3. 多个传动轴:杜博林旋转接头通常具有多个传动轴,可以同时实现多个方向上的传动。
每个传动轴都由一个内球和一个外球组成,它们可以独立地在不同的方向上旋转。
4. 柔性传动:由于杜博林旋转接头的特殊结构,它可以在多个方向上实现柔性传动。
这意味着它可以适应不同方向上的偏差,使得传动装置能够在不同姿态下工作。
总的来说,杜博林旋转接头通过其嵌套球体的结构和滚动接触点的特性,实现了在多个方向上的柔性传动,使得传动装置能够适应各种复杂的工作环境和运动要求。
工业软管接头样本1

INDUSTRISLANGE-TILBEHØR5:3HYDROSCAND INDUSTRISLANGETILBEHØRI denne gruppen finner til tilbehør til industrislanger .INDUSTRISLANGETILBEHØRSIDEINDUSTRISLANGETILBEHØR SIDEINNHOLDINNHOLD5001 klokupling europeisk type /m sl. stuss 2225001 klokupling europeisk type /m BSP utv. 2225001 klokupling europeisk type /m BSP innv. 2225001 pakninger til europeisk type 2225001 slangeskjøt 2225001 boltklemme 2225001 klokupling m/sikk. krave og sikkerhetsklips 2235001 klokupl. europeisk type DIN 3483 /m sl. stuss 2235001 klokupl. europeisk type DIN 3483 /m BSP utv. 2235001 klokupl. europeisk type DIN 3483 /m BSP innv. 2235001 klokupling 3-veis 2235001 klokupl. europeisk type messing /m sl. stuss 2235001 klokupl. europeisk type messing /m BSP utv. 2235001 klokupl. europeisk type messing /m BSP innv. 2245002 Steam grip klemme 2245002 Boss klemkupling 2245002 Boss dampkupling 2245003 klokupling GEKA messing /m sl. stuss 2245003 klokupling GEKA messing /m BSP innv. 2245003 klokupling GEKA messing /m BSP utv. 2245003 klokupling GEKA messing /m sl. stuss 224og sikkerhetskrave 5003 pakning og blindlokk 2255004 KC nipler 2255006 klokupl. amerikansk type Chicago /m sl. stuss 2265006 klokupl. amerikansk type Chicago /m BSP utv. 2265006 klokupl. amerikansk type Chicago /m BSP innv. 2265006 diverse tilbehør 2265007 Nor-kuplinger aluminium 2275007 Nor-kuplinger messing 2285008 Storz brannarmatur 2295008 Storz brannarmatur 2305009 Mody sikkerhetskupling /m sl. stuss 2315009 Mody sikkerhetskupling /m BSP innv. 2315009 Mody sikkerhetskupling /m BSP utv. 2315010 LAUX modell 42 hundel /m sl. stuss 2315011 LAUX modell 42 handel /m sl. stuss 2315012 LAUX modell 42 hundel /m BSP utv. 2315013 LAUX modell 42 handel /m BSP utv. 2315014 LAUX modell 42 blindlokk 2325015 LAUX modell 42 blindlokk 2325016 LAUX modell 42 hundel /m sveiseanslutning 2325017 LAUX modell 42 handel /m sveiseanslutning 2325018 LAUX modell 42 pakning EPDM 2325018 LAUX modell 42 pakning nitril 2325018 LAUX modell 42 pakning viton 2325030 LAUX modell C hundel /m sl. stuss 2335031 LAUX modell C handel /m sl. stuss 2335032 LAUX modell C hundel /m BSP utv. 2335033 LAUX modell C handel /m BSP utv. 2335035 LAUX modell C hundel /m sl. stuss 2335036 LAUX modell C hundel /m sveiseanslutning 2335037 LAUX modell C handel /m sveiseanslutning 2335038 Pakning for Laux modell C EPDM 2345038-10 Pakning for Laux modell C Nitril 2345110Bauer hundel /m sl. stuss 2355110Bauer låsering 2355110 Bauer handel2355110 Bauer pakning EPDM 2355020 Cam-Lock A 2365021 Cam-Lock B 2365022 Cam-Lock C 2375023 Cam-Lock D 2375024 Cam-Lock E 2385025 Cam-Lock F 2385026 Cam-Lock DC 2395027 Cam-Lock DP2395028 Cam-Lock pakninger 2405029 Cam-Lock reserve deler2405020 Cam-Lock for snøkanon slanger 2405050 fiskepumpe kuplinger 2415050 klembakker2415050 SMS meieri kuplinger 2425528 slangebag2425054 slangekupling for klembakke BSP innv. 2435054 slangekupling for klembakke BSP utv. 2435066 spylepistol for vanning 2435067 spylemunnstykke EN 671 2435067 spylemunnstykke Unifighter 2435067 spylepistol Heavy Duty 2435068 spylerør /m låsekran 2435056 brannkupling type 632445056 pakning til brannkupling type 632445491 kuleventil /m for brannkupling type 63 2445055 TW kuplinger handel DIN 28450 2455056 TW kuplinger hundel DIN 28450 2455057 TW lokk 2455058 TW plugg 2465086 TW seglass 2465088 TW fyllebend 2465089 TW KR fyllebend 2465079 sandblåsekupling2465059 flenser PN 16 DIN 2632/332465079 slangekupling og hylse til 1425-70-32 2475079 Altas kompressor deler2475201 betonginjeksjonskupling handel /m BSP inv. 2485202 betonginjeksjonskupling handel /m BSP utv. 2485203 betonginjeksjonskupling handel /m sl. stuss 2485205 betonginjeksjonskupling hundel /m BSP inv. 2485206 betonginjeksjonskupling hundel /m BSP utv. 2485207 betonginjeksjonskupling hundel /m sl. stuss 2485208 betonginjeksjonskupling hundel /m sl. stuss 248og sikkerhetskrave5209 betonginjeksjonskupling handel /m sl. stuss 248og sikkerhetskrave5210 betonginjeksjonskupling handel /m BSP utv. 249og sikkerhetsktave5200 betonginjeksjons hylse2495290 pakning forbetonginjeksjonskuplinger 2495528 Whipcheck2495528 sikkerhetswire /m to øyer 2495528 sikkerhets strømpe 2495554 europaventil 2495528 slangebro2505491 endemuffe til EVA slanger 2501460 alukanal2505061 dampkobling DIN EN 14423 /m BSPT utv. 2515062 dampkobling DIN EN 14423 /m BSPT innv. 2515002 IBC kuplinger2525005HS Hammer Union2535001-01-04 Liten 2 klør dia 42 mm 1/4”5001-01-06 Liten 2 klør dia 42 mm 3/8"5001-01-08 Liten 2 klør dia 42 mm 1/2"5001-01-12 Liten 2 klør dia 42 mm 3/4"5001-01-16 Liten 2 klør dia 42 mm 1"5001-01-20 Liten 2 klør dia 42 mm 1 1/4”5001-01-20S Stor 2 klør dia 62 mm 1 1/4”5001-01-24Stor 2 klør dia 62 mm1 1/2”5001-02-04 Liten 2 klør dia 42 mm 1/4”5001-02-06 Liten 2 klør dia 42 mm 3/8"5001-02-08 Liten 2 klør dia 42 mm 1/2"5001-02-12 Liten 2 klør dia 42 mm 3/4"5001-02-16 Liten 2 klør dia 42 mm 1"5001-02-20 Liten 2 klør dia 42 mm 1 1/4”5001-02-20S Stor 2 klør dia 62 mm 1 1/4”5001-02-24Stor 2 klør dia 62 mm1 1/2”5001-03-04 Liten 2 klør dia 42 mm 1/4”5001-03-06 Liten 2 klør dia 42 mm 3/8"5001-03-08 Liten 2 klør dia 42 mm 1/2"5001-03-12 Liten 2 klør dia 42 mm 3/4"5001-03-16 Liten 2 klør dia 42 mm 1"5001-03-20 Liten 2 klør dia 42 mm 1 1/4”5001-03-20S Stor 2 klør dia 62 mm 1 1/4”5001-03-24Stor 2 klør dia 62 mm1 1/2”Type Innv. gj. BSPTypeMedia5001-04-00 Pakning liten Luft 5001-04-01 Pakning liten Standard5001-04-02 Pakning liten Viton5001-04-03 Pakning liten Oljebestandig5001-04-24 Pakning stor Luft 5001-05-00Pakning litenDamp5001-01KlokuplingEuropeisk typePRODUKTGRUPPE 5005001-09SlangeskjøtPRODUKTGRUPPE 5005001-05BoltklemmePRODUKTGRUPPE 5005001-02KlokuplingEuropeisk typePRODUKTGRUPPE 5005001-03KlokuplingEuropeisk typePRODUKTGRUPPE 5005001Pakning for klokuplingEuropeisk og amerikansk typePRODUKTGRUPPE 500Artikkel nrDia fra mmDia til mmForp/kv.5001-09-06 54,0 Stål 3/8"5001-09-08 75,0 Stål 1/2"5001-09-08S 75,0 AISI 316 1/2”5001-09-10 90,0 Stål 5/8"5001-09-12 100,0 Stål 3/4"5001-09-12S 100,0 AISI 316 3/4”5001-09-16 100,0 Stål 1"5001-09-16S 100,0 AISI 316 1”5001-09-20 100,0 Stål 1 1/4"5001-09-24100,0 Stål 1 1/2"5001-09-24L 175,0 Stål lang 1 1/2”5001-09-32 116,0 Stål 2"5001-09-32L 205,0 Stål 2”5001-09-32S 116,0 AISI 316 2”5001-09-40 130,0 Stål 2 1/2"5001-09-40L 250,0 Stål lang 2 1/2”5001-09-48146,0 Stål 3"5001-09-48L 235,0 Stål lang 3”5001-09-64 188,0 Stål 4"5001-09-64L 270,0 Stål lang 4”5001-09-80 263,0 Stål 5"5001-09-96 250,0 Stål 6"5001-09-200 375,0 Stål 8”5001-09-254378,0Stål10”5001-05-029 20,0 29,0 105001-05-038 28,0 38,0 105001-05-040 32,0 40,0 105001-05-049 39,0 49,0 105001-05-052 44,0 52,0 105001-05-058 54,0 58,0 105001-05-060 48,0 60,0 105001-05-066 58,0 66,0 105001-05-076 60,0 76,0 105001-05-077 70,0 78,0 105001-05-089 83,0 89,0 105001-05-094 77,0 94,0 105001-05-096 88,0 96,0 105001-05-11594,0 115,0 105001-05-125 108,0 125,0 105001-05-128 115,0 128,0 105001-05-144 130,0 144,0 105001-05-145 115,0 145,0 105001-05-151 144,0 151,0 105001-05-165 151,0 165,0 105001-05-192 165,0 192,0 105001-05-208 195,0 208,0 55001-05-225 210,0 225,0 55001-05-250 227,0 250,0 55001-05-289 252,0 289,0 55001-05-330 284,0 330,0 35001-05-355 310,0 355,0 35001-05-380 335,0 381,0 25001-05-444382,0444,02Artikkel nr TypeStr .5001-17-12 Klokupling, tre-veis 3/4"5001-17-16Klokupling, tre-veis1"Type Gjenge 5001-13-04 Innv. gj. 1/4" F 5001-13-06 Innv. gj. 3/8" F5001-13-08 Innv. gj. 1/2" F 5001-13-12 Innv. gj. 3/4" F 5001-13-16 Innv. gj. 1" F 5001-13-20Innv. gj.1 1/4" FType Slange IDArtikkel nr Type Slange ID5001-11-04 Slangestuss 1/4"5001-11-06 Slangestuss 3/8"5001-11-08 Slangestuss 1/2"5001-11-10 Slangestuss 5/8"5001-11-12 Slangestuss 3/4"5001-11-16 Slangestuss 1"5001-11-20Slangestuss1 1/4"5001-61-06 Slangestuss 3/8"5001-61-08 Slangestuss 1/2"5001-61-12 Slangestuss 3/4"5001-61-16Slangestuss1"Type Gjenge Artikkel nr Type Gjenge 5001-12-04 Utv. gj. 1/4" M 5001-12-06 Utv. gj. 3/8" M 5001-12-08 Utv. gj. 1/2" M 5001-12-12 Utv. gj. 3/4" M 5001-12-16 Utv. gj. 1" M 5001-12-20Utv. gj.1 1/4" M5001-62-06 Utv. gj. 3/8" M5001-62-08Utv. gj.1/2" M 5001-62-12 Utv. gj. 3/4" M 5001-62-16Utv. gj.1" M5001-11KlokuplingEuropeisk typePRODUKTGRUPPE 500DIN 34835001-61KlokuplingEuropeisk type messingPRODUKTGRUPPE 5005001-17KlokuplingTre-veisPRODUKTGRUPPE 5005001-12KlokuplingEuropeisk typePRODUKTGRUPPE 500DIN 34835001-62KlokuplingEuropeisk type messingPRODUKTGRUPPE 5005001-13KlokuplingEuropeisk typePRODUKTGRUPPE 500DIN 34835001-15KlokuplingPRODUKTGRUPPE 500Klokupling med slangestuss og sikkerhets-krave. Dobbelt låsing, 42mm kloavstand, oljebestandig gummipakning. Arbeidstrykk 10 bar - 142 psi.Slange ID B mm H mm Vekt/stk Forp/kv.5001-15-0813 mm / 1/2”6276154g 105001-15-1015 mm / 5/8”6276146g 105001-15-1219 mm / 3/4”6276174g 105001-15-1625 mm / 1”6276236g10Type Gjenge5001-63-06 Innv. gj. 3/8" F 5001-63-08 Innv. gj. 1/2" F 5001-63-12 Innv. gj. 3/4" F 5001-63-16Innv. gj.1" FTypeSlange IDSlange ID Gjenge 5002-20-08 BSP utv. 1/2” 1/2”5002-20-12 BSP utv. 3/4” 3/4”5002-20-16 BSP utv. 1”1”5002-20-20 BSP utv. 1 1/4” 1 1/4”5002-20-24 BSP utv. 1 1/2” 1 1/2”5002-20-32BSP utv. 2”2”5002-30-08 1/2”1/2”5002-30-12 3/4” 3/4”5002-30-16 1”1”5002-30-201 1/4” 1 1/4”5002-30-241 1/2” 1 1/2”5002-30-322”2”*) Kan ikke brukes sammen med steam-grip art.5002-03-32. For denne dim. bruk 5002-03-34.5002-20BOSS klemkuplingSammen med Steam grip utgjør dette et godt og sikkert kuplings-alternativ for dampslangePRODUKTGRUPPE 5005002-30BOSS dampkuplingMed innv. BSPPRODUKTGRUPPE 5005001-63KlokuplingEuropeisk type messingPRODUKTGRUPPE 5005002-03Steam grip klemmePRODUKTGRUPPE 5005002-03-06 2 bolter 17,922,21005002-03-08 2 bolter 20,524,0505002-03-12 2 bolter 29,532,5505002-03-14 2 bolter 33,038,0505002-03-16 2 bolter 39,043,5505002-03-20 4 bolter 43,049,0255002-03-24 4 bolter 49,054,0205002-03-32 4 bolter 54,060,0105002-03-33 4 bolter 78,587,5105002-03-34 4 bolter 59,564,5105002-03-404 bolter63,571,010Type Slangemål utv. mm Forp/kv.Fra Til Artikkel nr Type Gjenge Artikkel nr TypeGjenge Artikkel nr Type Slange ID5003-10-06 Slangestuss 3/8"5003-10-08 Slangestuss 1/2"5003-10-10 Slangestuss 5/8"5003-10-12 Slangestuss 3/4"5003-10-16 Slangestuss 1"5003-10-20 Slangestuss 1 1/4"5003-10-24 Slangestuss 1 1/2”5003-10-32Slangestuss2”5003-20-06 Innv. gj. 3/8"5003-20-08 Innv. gj. 1/2"5003-20-12 Innv. gj. 3/4"5003-20-16 Innv. gj. 1"5003-20-20 Innv. gj. 1 1/4"5003-20-24 Innv. gj. 1 1/2”5003-20-32Innv. gj.2”5003-30-06 Utv. gj. 3/8"5003-30-08 Utv. gj. 1/2"5003-30-12 Utv. gj. 3/4"5003-30-16 Utv. gj. 1"5003-30-20 Utv. gj. 1 1/4"5003-30-24 Utv. gj. 1 1/2”5003-30-32Utv. gj.2”5003-40-08 Sl.stuss m/sikkerhetsring 1/2"5003-40-12 Sl.stuss m/sikkerhetsring 3/4"5003-40-16 Sl.stuss m/sikkerhetsring 1"5003-40-20Sl.stuss m/sikkerhetsring1 1/4”Artikkel nr Type Gjenge 5003-10Klokupling messing for vannOmbyttbar med GEKANB! Ikke ombyttbar med vanlig mod.PRODUKTGRUPPE 5005003-20Klokupling messing for vannOmbyttbar med GEKANB! Ikke ombyttbar med vanlig mod.PRODUKTGRUPPE 5005003-30Klokupling messing for vannOmbyttbar med GEKANB! Ikke ombyttbar med vanlig mod.PRODUKTGRUPPE 5005003-40Klokupling messing for vannOmbyttbar med GEKANB! Ikke ombyttbar med vanlig mod.PRODUKTGRUPPE 500*Type Slange IDType Slange ID5004-00-08 KC 1/2”5004-00-12 KC 3/4”5004-00-16 KC 1”5004-00-20 KC 1 1/4”5004-00-24 KC 1 1/2”5004-00-32 KC 2”5004-00-40 KC 2 1/2”5004-00-48 KC 3”5004-00-64 KC 4”5004-00-80 KC 5”5004-00-96 KC 6”5004-02-03 KC 8”5004-02-50KC10”5004-00-08S KC 1/2”5004-00-12S KC 3/4”5004-00-16S KC 1”5004-00-20S KC 1 1/4”5004-00-24S KC 1 1/2”5004-00-32S KC 2”5004-00-40S KC 2 1/2”5004-00-48S KC 3”5004-00-64S KC 4”5004-00-80S KC 5”5004-00-96S KC 6”5004-02-03S KC 8”5004-02-50SKC10”5004-00KC slangekuplingMed sveisestussStålPRODUKTGRUPPE 5005004-00KC slangekuplingMed sveisestussAISI 316PRODUKTGRUPPE 5005004KC slangekuplingMed BSPT gjengerStålPRODUKTGRUPPE 5005004KC slangekuplingMed BSPT gjengerAISI 316PRODUKTGRUPPE 500Artikkel nrBSPTSlange IDForp/kv.Artikkel nrBSPTSlange IDForp/kv.5004-08-08 1/2” 1/2” 505004-12-12 3/4” 3/4” 505004-16-16 1” 1” 505004-20-20 1 1/4” 1 1/4” 505004-24-24 1 1/2” 1 1/2” 505004-32-32 2” 2” 255004-40-40 2 1/2” 2 1/2” 105004-48-48 3” 3” 105004-64-64 4” 4” 55004-80-805” 5” 35004-96-966”6”25004-08-08B 1/2” 1/2” 505004-12-12B 3/4” 3/4” 505004-16-16B 1” 1” 505004-20-20B 1 1/4” 1 1/4” 505004-24-24B 1 1/2” 1 1/2” 505004-32-32B 2” 2” 255004-40-40B 2 1/2” 2 1/2” 105004-48-48B 3” 3” 105004-64-64B 4” 4”55004-80-80B 5” 5” 35004-96-96B6”6”2Type5003-50-00 Pakning for 5003-10/20/305003-60-00 Pakning for 5003-405003-70-00Blindlokk for 50035003Pakning og blindlokkPRODUKTGRUPPE 5005006KlokuplingAmerikansk type Chicago Med hull for sikkerhetsklipsPRODUKTGRUPPE 500AISI 316: Artikkel nr f.eks. 5006-xx-xx S5006Diverse tilbehørPRODUKTGRUPPE 500Artikkel nrType Innv.NPT Forp/kv.Artikkel nrTypeInnv.NPT Forp/kv.5006-03-04 Liten 2 klør dia.42mm 1/4” 255006-03-06 Liten 2 klør dia.42mm 3/8” 255006-03-08 Liten 2 klør dia.42mm 1/2” 505006-03-12 Liten 2 klør dia.42mm 3/4” 505006-03-16 Liten 2 klør dia.42mm 1” 505006-03-20 Stor 4 klør dia.67mm 1 1/4” 255006-03-24 Stor 4 klør dia.67mm 1 1/2” 255006-03-32Stor 4 klør dia.67mm 2”105006-01-99 Trippel Airking (Y) 5006-04-00 Sikkerhetsklips 5006-04-01 BlindPlugg5006-04-02 Sikkerhetsklips rustfri 5006-04-03 Pakning 4 klør 5006-05-005Blindplugg AISI 3165006KlokuplingAmerikansk type ChicagoMed hull for sikkerhetsklipsPRODUKTGRUPPE 500AISI 316: Artikkel nr f.eks. 5006-xx-xx S5006KlokuplingAmerikansk type Chicago Med hull for sikkerhetsklipsPRODUKTGRUPPE 500AISI 316: Artikkel nr f.eks. 5006-xx-xx SType Slange ID Forp/kv.Artikkel nrType Utv.NPT Forp/kv.5006-01-04 Liten 2 klør dia.42mm 1/4” 255006-01-06 Liten 2 klør dia.42mm 3/8” 255006-01-08 Liten 2 klør dia.42mm 1/2” 505006-01-12 Liten 2 klør dia.42mm 3/4” 505006-01-16 Liten 2 klør dia.42mm 1” 505006-01-20 Stor 4 klør dia.67mm 1 1/4” 255006-01-24 Stor 4 klør dia.67mm 1 1/2” 255006-01-32Stor 4 klør dia.67mm 2”105006-02-04 Liten 2 klør dia.42mm 1/4” 255006-02-06 Liten 2 klør dia.42mm 3/8” 255006-02-08 Liten 2 klør dia.42mm 1/2” 505006-02-12 Liten 2 klør dia.42mm 3/4” 505006-02-16Liten 2 klør dia.42mm 1”505004KC slangekuplingMed NPT gjengerStålPRODUKTGRUPPE 5005004KC slangekuplingMed NPT gjengerAISI 316PRODUKTGRUPPE 500NPTSlange IDForp/kv.NPTSlange IDForp/kv.5004-08-08N 1/2” 1/2” 505004-12-12N 3/4” 3/4” 505004-16-16N 1” 1” 505004-20-20N 1 1/4” 1 1/4” 505004-24-24N 1 1/2” 1 1/2” 505004-32-32N 2” 2” 255004-40-40N 2 1/2” 2 1/2” 105004-48-48N 3” 3” 105004-64-64N 4” 4” 55004-80-80N 5” 5” 35004-96-96N6”6”25004-08-08S 1/2” 1/2” 505004-12-12S 3/4” 3/4” 505004-16-16S 1” 1” 505004-20-20S 1 1/4” 1 1/4” 505004-24-24S 1 1/2” 1 1/2” 505004-32-32S 2” 2” 255004-40-40S 2 1/2” 2 1/2” 105004-48-48S 3” 3” 105004-64-64S 4” 4” 55004-80-80S 5” 5” 35004-96-96S6”6”2PRODUKTGRUPPE 500Type5007-00-16NOR lås 1-1” m/slangestuss5007-00-24NOR lås 1-1 1/2” m/slangestuss 5007-00-32NOR lås 1-2” m/slangestuss5007-00-40NOR lås 1-2 1/2” m/slangestuss 5007-00-48NOR lås 1-3” m/slangestuss 5007-02-24NOR lås 3-1 1/2” m/slangestuss 5007-03-24NOR lås 1-1 1/2” m/utv. gjenger 5007-03-32NOR lås 1-2” m/utv. gjenger5007-03-40NOR lås 1-2 1/2” m/utv. gjenger 5007-03-48NOR lås 1-3” m/utv. gjenger 5007-05-16NOR lås 3-1” m/utv. gjenger5007-05-20NOR lås 3-1 1/4” m/utv. gjenger 5007-05-24NOR lås 3-1 1/2” m/utv. gjenger 5007-06-16NOR lås 1-1” m/innv. gjenger5007-06-20NOR lås 1-1 1/4” m/innv. gjenger 5007-06-24NOR lås 1-1 1/2” m/innv. gjenger 5007-06-32NOR lås 1-2” m/innv. gjenger5007-06-40NOR lås 1-2 1/2” m/innv. gjenger 5007-06-48NOR lås 1-3” m/innv. gjenger 5007-08-16NOR lås 3-1” m/innv. gjenger 5007-08-20NOR lås 3-1 1/4” m/innv. gjenger 5007-08-24NOR lås 3-1 1/2” m/innv. gjenger 5007-09-01NOR lås 1-blindlokk m/kjede 5007-10-01NOR 1 Nitrilpakning 5007-10-02NOR 2 Nitrilpakning 5007-10-03NOR 3 Nitrilpakning 5007-11-00Kuplingnøkkel for lås 1-2-3L1L2D NOR lås 190,041,0105,0NOR lås 1-3”110,041,0105,0NOR lås 283,541,086,0NOR lås 377,041,067,0PRODUKTGRUPPE 500Type5007-20-24NOR lås 1-1 1/2” m/slangestuss 5007-20-32NOR lås 1-2” m/slangestuss5007-20-40NOR lås 1-2 1/2” m/slangestuss 5007-20-48NOR lås 1-3” m/slangestuss 5007-21-20NOR lås 2-1 1/4” m/slangestuss 5007-21-24NOR lås 2-1 1/2” m/slangestuss 5007-21-32NOR lås 2-2” m/slangestuss 5007-22-16NOR lås 3-1” m/slangestuss5007-22-20NOR lås 3-1 1/4” m/slangestuss 5007-22-24NOR lås 3-1 1/2” m/slangestuss 5007-23-20NOR lås 1-1 1/4” m/utv. gjenger 5007-23-24NOR lås 1-1 1/2” m/utv. gjenger 5007-23-32NOR lås 1-2” m/utv. gjenger5007-23-40NOR lås 1-2 1/2” m/utv. gjenger 5007-23-48NOR lås 1-3” m/utv. gjenger 5007-24-20NOR lås 2-1 1/4” m/utv. gjenger 5007-24-24NOR lås 2-1 1/2” m/utv. gjenger 5007-24-32NOR lås 2-2” m/utv. gjenger 5007-25-16NOR lås 3-1” m/utv. gjenger5007-25-20NOR lås 3-1 1/4” m/utv. gjenger 5007-25-24NOR lås 3-1 1/2” m/utv. gjenger 5007-26-20NOR lås 1-1 1/4” m/innv. gjenger 5007-26-24NOR lås 1-1 1/2” m/innv. gjenger 5007-26-32NOR lås 1-2” m/innv. gjenger5007-26-40NOR lås 1-2 1/2” m/innv. gjenger 5007-26-48NOR lås 1-3” m/innv. gjenger 5007-27-20NOR lås 2-1 1/4” m/innv. gjenger 5007-27-24NOR lås 2-1 1/2” m/innv. gjenger 5007-27-32NOR lås 2-2” m/innv. gjenger 5007-28-16NOR lås 3-1” m/innv. gjenger5007-28-20NOR lås 3-1 1/4” m/innv. gjenger 5007-28-24NOR lås 3-1 1/2” m/innv. gjenger 5007-29-01NOR lås 1-blindlokk m/kjede 5007-29-02NOR lås 2-blindlokk m/kjede 5007-29-03NOR lås 3-blindlokk m/kjede 5007-10-01NOR 1 Nitrilpakning 5007-10-02NOR 2 Nitrilpakning 5007-10-03NOR 3 Nitrilpakning 5007-11-00Kuplingnøkkel for lås 1-2-3Type L1L2D NOR lås 190,041,0105,0NOR lås 1-3”110,041,0105,0NOR lås 283,541,086,0NOR lås 377,041,067,0Storz brannarmaturAluminiumPRODUKTGRUPPE 500TypeDimensjon type5008-10-32Pakning C NBR 5008-10-48Pakning B NBR 5008-10-64Pakning A NBR 5008-20-32Pakning C silikon 5008-20-48Pakning B silikon 5008-20-64Pakning A silikon5008-20-72Pakning 100/115 silikon 5008-20-80Pakning 125-148 silikon 5008-00-64Storz slangehals A-4”5008-00-72Storz slangehals A- 4 1/2”5008-01-40Storz slangehals B- 2 1/2”5008-01-48Storz slangehals B-3”5008-02-32Storz slangehals 65-2”5008-02-40Storz slangehals 65- 2 1/2”5008-03-20Storz slangehals C- 1 1/4”5008-03-24Storz slangehals C- 1 1/2”5008-03-32Storz slangehals C-2”5008-04-16Storz slangehals D-1”5008-06-64Storz utv. gjenger A-4”5008-06-72Storz utv. gjenger A- 4 1/2”5008-07-32Storz utv. gjenger B-2”5008-07-40Storz utv. gjenger B- 2 1/2”5008-07-48Storz utv. gjenger B-3”5008-08-32Storz utv. gjenger 65-2”5008-08-40Storz utv. gjenger 65- 2 1/2”5008-09-20Storz utv. gjenger C- 1 1/4”5008-09-32Storz utv. gjenger C-2”5008-09-40Storz utv. gjenger C- 2 1/2”5008-10-16Storz utv. gjenger D-1”5008-11-72Storz innv. gjenger A- 4 1/2”5008-12-64Storz innv. gjenger A-4”5008-13-32Storz innv. gjenger B-2”5008-13-40Storz innv. gjenger B- 2 1/2”5008-13-48Storz innv. gjenger B-3”5008-14-32Storz innv. gjenger 65-2”5008-14-40Storz innv. gjenger 65- 2 1/2”5008-15-20Storz innv. gjenger C- 1 1/4”5008-15-32Storz innv. gjenger C-2”5008-16-16Storz innv. gjengerD-1”STORz KNASTAvSTAND:Type A 133 mm Type B 89 mm Type C 66 mm Type D 31 mm Type 6581 mm5008Storz brannarmaturMessingPRODUKTGRUPPE 500STORz KNASTAvSTAND:Type A 133 mm Type B 89 mm Type C 66 mm Type D 31 mm Type 6581 mmTypeDimensjon type 5008-21-40Storz slangehals B- 2 1/2”5008-21-48Storz slangehals B-3”5008-22-32Storz slangehals 65-2”5008-22-40Storz slangehals 65- 2 1/2”5008-23-16Storz slangehals C-1“5008-23-20Storz slangehals C- 1 1/4”5008-23-24Storz slangehals C- 1 1/2”5008-23-32Storz slangehals C-2”5008-24-16Storz slangehals D-1”5008-27-32Storz utv. gjenger B-2”5008-27-40Storz utv. gjenger B- 2 1/2”5008-27-48Storz utv. gjenger B-3”5008-28-32Storz utv. gjenger 65-2”5008-28-40Storz utv. gjenger 65- 2 1/2”5008-29-20Storz utv. gjenger C- 1 1/4”5008-29-24Storz utv. gjenger C- 1 1/2”5008-29-32Storz utv. gjenger C-2”5008-30-16Storz utv. gjenger D-1”5008-33-32Storz innv. gjenger B-2”5008-33-40Storz innv. gjenger B- 2 1/2”5008-33-48Storz innv. gjenger B-3”5008-34-32Storz innv. gjenger 65-2”5008-34-40Storz innv. gjenger 65- 2 1/2”5008-35-16Storz innv. gjenger C-1”5008-35-20Storz innv. gjenger C- 1 1/4”5008-35-24Storz innv. gjenger C- 1 1/2”5008-35-32Storz innv. gjenger C-2”5008-35-40Storz innv. gjenger C- 2 1/2”5008-36-16Storz innv. gjengerD-1”Artikkel nr Type Slange ID5009-01-06 2 klør 3/8"5009-01-08 2 klør 1/2"5009-01-10 2 klør 5/8"5009-01-12 2 klør 3/4"5009-01-162 klør1"Artikkel nr Type Gjenge 5009-02-06 2 klør G 3/8" F 5009-02-08 2 klør G 1/2" F 5009-02-12 2 klør G 3/4" F 5009-02-162 klørG 1" FArtikkel nr Type Gjenge 5009-03-06 2 klør G 3/8" M 5009-03-08 2 klør G 1/2" M 5009-03-12 2 klør G 3/4" M 5009-03-162 klørG 1" M5010Laux kupling mod. 42Slangeanslutning Leveres med låsesplintPRODUKTGRUPPE 5005011Laux kupling mod. 42SlangeanslutningPRODUKTGRUPPE 5005012Laux kupling mod. 42Gjengeanslutning Leveres med låsesplintPRODUKTGRUPPE 5005013Laux kupling mod. 42GjengeanslutningPRODUKTGRUPPE 500Artikkel nr Kupling str .Type Slange ID Artikkel nr Kupling str .Type Gjenge Artikkel nr Kupling str .Type Gjenge Artikkel nr Kupling str .Type Slange ID 5010-24-24 38 KMS 1 1/2"5010-32-24 48 KMS 1 1/2"5010-32-32 48 KMS 2"5010-40-40 60 KMS 2 1/2"5010-48-32 76 KMS 2"5010-48-40 76 KMS 2 1/2"5010-48-48 76 KMS 73.6 mm5010-48-49 76 KMS 3"5010-64-64 102 KMS 4"5010-80-80 133 KMS 5"5010-96-96 152 KMS 6"5010-22-03203KMS8”5012-24-24 38 KMG G 1 1/2”5012-32-32 48 KMG G 2"5012-48-32 76 KMG G 2"5012-48-40 76 KMG G 2 1/2”5012-48-48 76 KMG G 3"5012-64-56 102 KMG G 3 1/2”5012-64-64 102 KMG G 4"5012-80-80 133 KMG G 5"5012-96-96152KMGG 6"5013-24-24 38 KVG G 1 1/2”5013-32-24 48 KVG G 1 1/2"5013-32-32 48 KVG G 2"5013-48-32 76 KVG G 2"5013-48-48 76 KVG G 3"5013-64-64 102 KVG G 4"5013-80-80 133 KVG G 5"5013-96-96152KVGG 6"5011-24-24 38 KVS 1 1/2"5011-32-24 48 KVS 1 1/2"5011-32-32 48 KVS 2"5011-40-40 60 KVS 2 1/2"5011-48-32 76 KVS 2"5011-48-40 76 KVS 2 1/2"5011-48-48 76 KVS 73.6 mm5011-48-49 76 KVS 3"5011-64-48 102 KVS 73.6 mm5011-64-64 102 KVS 4"5011-80-80 133 KVS 5"5011-96-96 152 KVS 6"5011-22-03203KVS8”5014Laux kupling mod. 42BlindlokkLeveres med låsesplint PRODUKTGRUPPE 5005018-00Pakning EPDMStandardPRODUKTGRUPPE 5005018-10Pakning NitrilPRODUKTGRUPPE 5005018-20Pakning vitonPRODUKTGRUPPE 500Maks arbeidstrykk: væsker12 barTrykkluft8 barVed forespørsel kan vi også levere Laux-rør med koblinger i lengder fra 1m til 6m5015Laux kupling mod. 42BlindlokkPRODUKTGRUPPE 5005016Laux kupling mod. 42Sveiseanslutning Leveres med låsesplintPRODUKTGRUPPE 5005017Laux kupling mod. 42SveiseanslutningPRODUKTGRUPPE 5005014-00-24 38 KXM 5014-00-32 48 KXM 5014-00-40 60 KXM 5014-00-48 76 KXM 5014-00-64 102 KXM 5014-00-80 133 KXM 5014-00-96152KXM5015-00-24 38 KXV 5015-00-32 48 KXV 5015-00-40 60 KXV 5015-00-48 76 KXV 5015-00-64 102 KXV 5015-00-80 133 KXV 5015-00-96152KXV5016-00-32 48 KKM 50.85016-00-48 76 KKM 76.05016-00-64 102 KKM 102.05016-00-80 133 KKM 133.05016-00-96152KKM152.45017-00-32 48 KKV 50.85017-00-48 76 KKV 76.05017-00-64 102 KKV 102.05017-00-80 133 KKV 133.05017-00-96152KKV152.4. 5018-00-24 Pakning EPDM 385018-00-32 Pakning EPDM 485018-00-40 Pakning EPDM 605018-00-48 Pakning EPDM 765018-00-64 Pakning EPDM 1025018-00-80 Pakning EPDM 1335018-00-96Pakning EPDM152. . 5018-10-24 Pakning Nitril 385018-10-32 Pakning Nitril 485018-10-40 Pakning Nitril 605018-10-48 Pakning Nitril 765018-10-64 Pakning Nitril 1025018-10-80 Pakning Nitril 1335018-10-96Pakning Nitril1525018-20-24 Pakning Viton 385018-20-32 Pakning Viton 485018-20-40 Pakning Viton 605018-20-48 Pakning Viton 765018-20-64 Pakning Viton 1025018-20-80 Pakning Viton 1335018-20-96Pakning Viton152Type Utv. gjenge dim.Type Utv. gjenge dim.5030-00-32 50 x 50 2”5030-00-40 70 x 63 2 1/2”5030-00-48 89 x 76 3”5030-00-56 89 x 89 3 1/2”5030-00-64 108 x 100 4”5030-00-80 133 x 125 5”5030-00-96159 x 1506”5031-00-32 50 x 50 R-2”5031-00-40 70 x 63 R-2 1/2”5031-00-48 89 x 76 R-3”5031-00-56 89 x 89 R-3 1/2”5031-00-64 108 x 100 R-4”5031-00-80 133 x 125 R-5”5031-00-96159 x 150R-6”5032-00-24R-1 1/2”5032-00-32 50 x 50 R-2”5032-00-40 70 x 63 R-2 1/2”5032-00-48 89 x 76 R-3”5032-00-64 108 x 100 R-4”5032-00-80 133 x 125 R-5”5032-00-96159 x 150R-6”5033-00-32 50 x 50 R-2”5033-00-40 70 x 63 R-2 1/2”5033-00-48 89 x 76 R-3”5033-00-64 108 x 100 R-4”5033-00-80 133 x 125 R-5”5033-00-96159 x 150R-6”5030Laux kupling mod. CSlangeanslutning Ombyttbar med PerrotPRODUKTGRUPPE 5005031Laux kupling mod. CSlangeanslutning Ombyttbar med Perrot PRODUKTGRUPPE 5005032Laux kupling mod. CGjengeanslutning Ombyttbar med Perrot PRODUKTGRUPPE 5005033Laux kupling mod. CGjengeanslutning Ombyttbar med Perrot PRODUKTGRUPPE 500Artikkel nr Type DimensjonArtikkel nr Type Dimensjon5034-00-32 50 x 50 2”5034-00-40 70 x 63 2 1/2”5034-00-48 89 x 76 3”5034-00-64 108 x 100 4”5034-00-80 133 x 125 5”5034-00-96159 x 1506”5035-00-32 50 x 50 2”5035-00-40 70 x 63 2 1/2”5035-00-48 89 x 76 3”5035-00-64 108 x 100 4”5035-00-80 133 x 125 5”5035-00-96159 x 1506”5036-00-32 50 x 50 2”5036-00-40 70 x 63 2 1/2”5036-00-48 89 x 76 3”5036-00-64 108 x 100 4”5036-00-80 133 x 125 5”5036-00-96159 x 1506”5037-00-32 50 x 50 2”5037-00-40 70 x 63 2 1/2”5037-00-48 89 x 76 3”5037-00-64 108 x 100 4”5037-00-80 133 x 125 5”5037-00-96159 x 1506”5034Laux kupling mod. CBlindlokkOmbyttbar med PerrotPRODUKTGRUPPE 5005035Laux kupling mod. CBlindlokkOmbyttbar med PerrotPRODUKTGRUPPE 5005036Laux kupling mod. CSveiseanslutning Ombyttbar med PerrotPRODUKTGRUPPE 5005037Laux kupling mod. CSveiseanslutning Ombyttbar med PerrotPRODUKTGRUPPE 500Maks arbeidstrykk: væsker12 barTrykkluft8 barVed forespørsel kan rør til mod. C leveres fra verk i faste langder à 6m。
奥特林豪斯离合器 2004版旋转接头中文技术资料

页码
产品技术参数
单通道压力油用旋转接头 0086-010-规格-160系列
9.03.00
双通道压力油用旋转接头 0086-226/326-规格-010040系列 9.04.00 三通道压力油用旋转接头
0086-326-规格-010040系列 9.05.00 带编码器的双通道压力油用旋转接头 0086-226-规格-010041系列 9.06.00 压力油和压缩空气用双通道旋转接头 0086-226-规格-010340系列 9.07.00 直接连接到电磁换向阀或压力安全阀上的压缩空气用旋转接头 0086-006-规格-0..系列 9.08.00 压缩空气用旋转接头 G 1/8
0086-006-00-050系列 9.09.00 压缩空气用旋转接头 G 1/8 配有3/2换向阀 0086-006-00-055系列
9.09.00 旋转接头按用户要求的不同的应用示例 9.11.00
旋转接头
用于压力油,压缩空气
以下是随旋转接头一起供货:
M35x1.5 用于A1和 G1A 用于A:系列0086-006-03-000000
旋转接头 G1/8带3位2通阀控制最大压力= 8 bar。
由壬型号

2002 型 20000PSI NSCWP,测试压力 30000PSI 红色螺 母,红色零件。
标称管道尺寸
总长
螺母半径
材料 螺母 零件
重量
in
mm
in
mm
in
mm
Ibs kgs
2
50.8
73/8
187.32
311/16 93.66
SF
AS 22.5 49.60
2202 型 配有氟化橡胶密封环,15000PSI NSCWP,热处理部件 100%经过硬度测试,符合美国腐蚀工程师标准协会 MR-01-75 和美国石油学会 RP-14E 标准。 专门用于酸性气体使用场合。绿色螺母,绿色零件。
SF 13.25 5.9
3
76.2
63/8 161.9 3/8 9.5 43/8 117.5 SF
SF 21.0 9.5
4
101.6 81/16 204.8 3/8 9.5 51/4 133.4 SF
SF 39.5 17.9
1502 型
配有可更换的弹性丁腈橡胶密封环,坚固壁厚设计用于高压系统。
推荐用于注水泥、压裂、酸化、测试及堵塞和压井管线,也可用于无压密封连接,采用 对焊 Sch XXH。
注:DIC=可锻铸铁 SC=铸钢 SF=锻钢 AS=合金钢
1
25.4
211/16 68.3 115/16 49.2 SC/SF CDB/SF 1.75 0.8
11/2
38.1
27/8 73.0 23/8 60.3
SF
SF
2.37 1.1
2
50.8
35/16 84.1 229/32 73.8
SF
SF
5.25 2.4
俄罗斯标准目录

俄罗斯标准目录GOST 1.0-2002 开展国家间标准化工作的规则:基本规定GOST 1.5-2001 国家标准化体系。
标准的章节,叙述,格式和内容GOST 1000-1978 建筑设计的消防标准. 建筑结构耐火性的试验方法GOST 10003-90E 苯乙烯.技术条件GOST 10006-1980 金属管. 拉力试验方法GOST 10007-80Е 氟塑料-4。
技术条件。
GOST 1001-1978 建筑尺寸模数协调. 基本规定GOST 10014-1973 漂白和白色木浆。
技术条件。
GOST 10015-1987 印相用涂胶纸。
技术条件。
GOST 10016-1980 竖分模卧式锻造机. 精度标准GOST 10018-79Е 工业用氰化铜。
技术条件。
GOST 10019-1974 Рy1.6МРа( 16kgf/平方厘米) 钢制法兰连接的微启式弹簧安全阀。
技术条件GOST 10020-1983 库兹涅茨煤田的氧化烟煤和戈尔洛夫卡煤田的无烟煤。
分类。
GOST 10021-1984 测角计和分光测角计。
型式。
基本参数。
一般技术要求GOST 1002-1978 卫生陶瓷制品. 术语和定义GOST 10022-1975 城市公共汽车和无轨电车。
车厢。
基本参数和尺寸GOST 10023-84Е 电铃按钮。
一般技术条件GOST 10025-1978 锡磷青铜棒。
技术条件。
GOST 10026-87Е 闭式单动单曲柄冲床. 参数和尺寸GOST 10028-1981 玻璃毛细管粘度计。
技术条件GOST 10028-81Е 玻璃毛细管粘度计。
技术条件GOST 1003-1973 液体环烷酸盐催干剂。
技术条件。
GOST 10032-1980 定置式、移动式和船用辅助柴油发电机. 对自动化的技术要求GOST 10033-1968 柴油机和燃气发动机加压用涡轮压缩机. 试验方法GOST 10036-75Е 照明灯用散光镜、硅酸盐玻璃制保护和装饰玻璃。
API 7K 第5版中文版
7.7质量控制要求...................................................................15
8.2 质量控制人员资格...............................................................16
8.3测试设备.......................................................................16
5设计验证..........................................................................8
5.1总则............................................................................8
7焊接要求.........................................................................15
7.1总则...........................................................................15
9.7 活塞泥浆泵零部件...............................................................31
9.8绞车零部件.....................................................................55
ARJ1020F
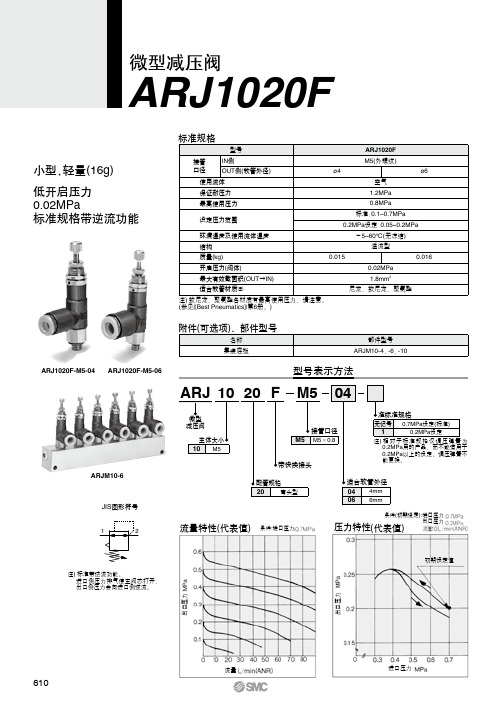
初期设定值出口压力出口压力微型减压阀ARJ1020F(参见《Best Pneumatics 》第6册。
)小型、轻量(16g)低开启压力0.02MPa标准规格带逆流功能ARJ1020F-M5-06ARJ1020F-M5-04ARJM10-6型号表示方法JIS 图形符号注)标准带逆流功能。
进口侧压力排气使主阀芯打开,出口侧压力会向进口侧逆流。
流量特性(代表值)条件:进口压力压力特性条件(初期设定):进口压力出口压力流量进口压力(代表值)610面板开孔尺寸2×1/82×ø3.52×ø3.5(安装孔)单体·结构图/外形尺寸图集装板(可选项)/外形尺寸图:在IN 侧配管时,要保持阀芯导座的对面宽度(对边10),用推荐力矩1.5~2N ·m 进行紧固。
过大的紧固力矩或在指定外的部分进行配管时,会造成损坏。
@产品在配管时或手轮操作时,请不要施加过大的弯曲力矩。
以免造成损坏。
警告配管警告:在确认进口侧压力以及出口侧压力表的表示压的同时进行设定。
过分的转动手轮将会导致内部零件的破损。
注意:必须先解锁进行压力调整后再锁住。
若顺序错误,会导致手轮的破损以及出口侧压力的变动。
<锁操作方法>将锁母拧松则解锁。
拧紧则上锁。
@在执行元件和电磁阀之间设置,可作为带单向阀的减压阀使用。
安装·调整的螺纹部使用了接着剂,请注意。
使用前必读。
安全上的注意参见前附43,各系列的共同注意事项由P.365~369确认。
微型减压阀ARJ1020F锁母面板螺纹适合软管外径31(带S R J 1020F -M 5-04)32(带S R J 1020F -M 5-06)适合软管外径φ4、φ6(安装孔)共通611流量特性(代表值)出口压力出口压力流量进口压力条件(初期设定):进口压力出口压力微型减压阀ARJ210 系列托架压力表注)134856G27-10-R1附件(可选项)·部件型号注) 压力表另配的场合,请使用管接头组件(134828A)。
deublin旋转接头样本

ENGINEERINGCATALOG2600E n g i n e e r e d f o r P e r f o r m a n c eROTATING UNIONSwater steam air hydraulic hot oil vacuum coolant custom applicationsw w w.d e u b l i n.c o mw w w .d e u b l i n .c o m2Selection Chart for DEUBLIN Rotating UnionsWater & Hot Oil up to 250°F *6-213/8" - 2"557502503,500General Purpose 1 or 2 6 - 103/8" - 2"571502003,500Water Service 1 or 27 - 1021/2"755200250750General Purpose 1 or 2113"857150250500Water Service 1 or 212 - 133/8" - 1"541,8002003,500316 Stainless Steel1143/8"9274,0002002,000Water Service High Pressure 1151/2" - 3/4"221,500250250Water Service Car Wash 1152" - 4"6000150250750Water Service Cartridge Seal 1 or 216 - 195"F127150250750Water Service1 or 2203/4" - 1 1/2"2400150250100Water Service Continuous Casters 1 or 221Steam & Hot Oil up to 450°F * 22-303/8" - 1/2" N Steam 250400750Single Bearing Spherical Seal 1 or 2223/8" - 1/2" N Hot Oil 100450750Single Bearing Spherical Seal 1 or 2223/4" - 2" 9000 Steam 150365400Single Bearing Spherical Seal 1 or 223 - 253/4" - 2" 9000 Hot Oil 100450400Single Bearing Spherical Seal 1 or 223 - 2511/2"HPS Steam 250400400Dual Bearing Spherical Seal 2263/4" - 2"H Steam 150365400Dual Bearing Spherical Seal 1 or 227 - 3021/2" - 5"H Steam 150365180Dual Bearing Spherical Seal 1 or 227 - 303/4" - 2"H Hot Oil 100450400Dual Bearing Spherical Seal 1 or 227 - 3021/2" - 5"H Hot Oil 100450350Dual Bearing Spherical Seal 1 or 227 - 30Air &Hydraulic31-451/8" - 3/8"1005,1102,11151,0002503,500Standard Applications 131 - 321/2"1205,2200 1,0002503,500Standard Applications 131 - 323/4" - 1 1/2"250,355,4521,0002503,500Standard Applications 1331/8" - 3/8"1005,1102,11151,0002503,500In-the-shaft Mounted 1341/4" - 1/2"AP 5,7002001,500High Pressure High Speed1351/4" - 1 1/2"D 6,400120250High Pressure Low Speed or Swivel 1363/8" X 215001502501,500DEU-PLEX Air 2371/2" X 215901502501,500DEU-PLEX Air 2381/2" X 215791,0002501,500DEU-PLEX Hyd Oil2391/4" X 225207502505,000DEU-PLEX Air & Hyd Oil 2403/8" - 1/2" X 41379,14793,600175250Multi Media 4 Pass4411/4" - 1/2"17,213,000250250Low Speed Air & Hyd Oil1421/4" X 1/2"21173,000250250Low Speed Tandem Air & Hyd Oil 2431/4"-1/2"-3/4" X 21690,1790,18903,00025020DEU-PLEX Low Speed 244 - 451/4" X 3/4" X 318903,000250250Triple Passage345Coolant (Wider range of products featured in Coolant Union Catalog)46-513/8"11172,00016020,000Bearingless1463/8"11292,00016020,000Bearingless ("Pop-Off") High Speed 1473/16"11011,50016015,000Standard Applications High Speed 1483/8"11161,00016010,000Standard Applications1491/4" - 3/8"11091,50016020,000Dry-run ("Pop-Off") High Speed 1503/8"9021,00016010,000Dry-run ("Pop-Off")151Unions for Special Applications *52-531/8" - 1"1005,468,9817502503,500Water,Oil Rig,Clutch & Brake 1 to 3521/4" - 3/8"1102,1115,8821502503,500Central Tire Inflation 1 or 252Custom7000 / 71003,0002505,000Around The Shaft53SizeSeriesPagesPassagesDescriptionTemp.Speed PSI °F RPM*Attention! For applications exceeding indicated limits,contact DEUBLIN.Indicate media,size,speed (RPM),pressure,temperature and connection specifications.-Subject to technical and dimensional changes without notice.1-847-689-8600 o r Max.Operating DataSince 1945,Deublin has grown from a small garage shop to theworld’s largest manufacturer of rotating unions.Today,Deublin’sinternational headquarters is located in Waukegan,Illinois,withmanufacturing facilities,sales offices and warehouses located in17countries on four continents.DEMAND CUSTOM UNIONSo r w w w.d e u b l i n.c o m1-847-689-8PROFESSIONAL SERVICE AROUND THE WORLDAt Deublin,our service is as reliable as our products.Given the importance of rotating unions to your equipment’s performance,our products have to be reliable.To provide you local and emergencyOperating DataMaximum Water Pressure Model55-555 750 PSI50barMaximum Water Pressure Model655600 PSI41barMaximum Saturated Steam Pressure (Intermittent)15 PSI 1 barForged BrassOperating DataMaximum Water Pressure 150 PSI 10 bar 1-847-689-8600 o r Seal GuideSilicon Carbide Keyed Rotor SealGasketCarbon Graphite/Silicon Carbide Floating SealViton-O-RingCoil SpringAcross FlatsA1/16"D 1Monoflow Length(3) 11/32"Dia. VentsEq. SpacedJLock-up Approx81-847-689-8600 o r w w w .d e u b l i n .c o m55 & 57 Series Monoflow Union SpecificationsChart InstructionsSelect Union Size and Rotor Thread.Follow this line to opposite page to find Duoflow Elbow Specifications.Add Duoflow Elbow Suffix to the end of the Ordering Number.†Recessed O-Ring in Rotor End in Place of Copper Gasket55-000-00155-147-15157-000-00157-050-0013⁄8"NPT RH 13⁄4"315⁄16"413⁄16"1"5⁄8"3⁄8"7⁄8"211⁄16"55-000-00255-147-15257-000-00257-050-0023⁄8"NPT LH 55-000-00355-147-14957-000-00357-050-0035⁄8"-18 UNF RH 13⁄4"315⁄16"413⁄16"1"5⁄8"3⁄8"7⁄8"21⁄2"55-000-00455-147-15057-000-00457-050-0045⁄8"-18 UNF LH 55-000-09455-147-19257-000-09457-050-094G 3⁄8"(BSP)RH 44.510212326169.522.26355-000-09555-147-19357-000-09557-050-095G 3⁄8"(BSP)LH 155-000-001155-208-113157-000-001157-050-0011⁄2"NPT RH 21⁄4"413⁄16"57⁄8"17⁄16"7⁄8"1⁄2"11⁄8"31⁄2"155-000-002155-208-114157-000-002157-050-0021⁄2"NPT LH 155-000-021155-208-185157-000-021157-050-0213⁄4"-16 UNF RH 21⁄4"411⁄16"53⁄4"15⁄16"3⁄4"1⁄2"11⁄8"31⁄16"155-000-022155-208-229157-000-022157-050-0223⁄4"-16 UNF LH 155-000-151155-208-252157-000-151157-050-151G 1⁄2"(BSP)RH 57.2120148341912.728.678155-000-152155-208-253157-000-152157-050-152G 1⁄2"(BSP)LH 255-000-020255-052-255257-000-020257-050-0203⁄4"NPT RH 27⁄8"59⁄16"63⁄4"17⁄16"7⁄8"11⁄16"11⁄4"41⁄16"255-000-021255-052-256257-000-021257-050-0213⁄4"NPT LH 255-000-003255-052-258257-000-135†257-050-135†1"-14 UNS RH 27⁄8"57⁄16"65⁄8"15⁄16"3⁄4"21⁄32"11⁄4"311⁄16"255-000-027255-052-257257-000-136†257-050-136†1"-14 UNS LH 255-000-284255-052-445257-000-284257-050-284G 3⁄4"(BSP)RH 73138168341917.53294255-000-285255-052-446257-000-285257-050-285G 3⁄4"(BSP)LH 355-000-002355-064-186357-000-002357-050-0021" NPT RH 31⁄4"613⁄16"85⁄16"115⁄16"11⁄8"1"11⁄2"411⁄16"355-000-003355-064-187357-000-003357-050-0031" NPT LH 355-000-019355-064-328357-000-019357-050-01911⁄2"-12 UNF RH 31⁄4"613⁄16"85⁄16"115⁄16"11⁄8"1"11⁄2"41⁄4"355-000-074355-064-329357-000-074357-050-07411⁄2"-12 UNF LH 355-000-222355-064-378357-000-222357-050-222G1" (BSP)RH 75.41662044221.522.238.1108355-000-223355-064-379357-000-223357-050-223G1" (BSP)LH 525-000-001525-097-043527-000-001527-050-00111⁄4"NPT RH 39⁄16"79⁄16"93⁄8"23⁄16"11⁄8"11⁄4"13⁄4"51⁄4"525-000-002525-097-044527-000-002527-050-00211⁄4"NPT LH 525-000-026525-097-095527-000-026527-050-02613⁄4"-12 UN RH 39⁄16"79⁄16"93⁄8"23⁄16"13⁄16"11⁄4"13⁄4"411⁄16"525-000-027525-097-096527-000-027527-050-02713⁄4"-12 UN LH 525-000-054525-097-122527-000-054527-050-054G11⁄4"(BSP)RH 90.5191234542730.244.5119525-000-055525-097-123527-000-055527-050-055G11⁄4"(BSP)LH 555-000-001555-033-154557-000-001557-050-00111⁄2"NPT RH 41⁄4"81⁄2"105⁄16"27⁄16"13⁄16"11⁄2"21⁄8"6"555-000-002555-033-160557-000-002557-050-00211⁄2"NPT LH 555-000-395555-033-399557-000-395557-050-3952"-12 UN RH 41⁄4"87⁄8"1011⁄16"213⁄16"11⁄8"11⁄2"21⁄8"513⁄16"555-000-396555-033-382557-000-396557-050-3962"-12 UN LH 555-000-198555-033-288557-000-198557-050-198G11⁄2"(BSP)RH 10822526871293554147555-000-199555-033-289557-000-199557-050-199G11⁄2"(BSP)LH 655-500-116655-502-116657-000-116657-050-1162" NPT RH 45⁄8"101⁄16"113⁄4"3"11⁄2"17⁄8"21⁄4"7"655-500-117655-502-117657-000-117657-050-1172" NPT LH 127⁄16"655-500-124655-502-124657-000-124657-050-124G2" (BSP)RH 1172462896528.64755164655-500-125655-502-125657-000-125657-050-125G2" (BSP)LHB Port NPTA xRotor ThreadC D 1D 2E FGHJOrdering Number 55 Series All Purpose55 Series E.L.S.57 SeriesE.L.S.57 Series Water Service3⁄8"1⁄2"3⁄4"1"2"11⁄4"11⁄2"xMetric threads and other thread sizes are available.Contact factory for further information.For 2",21⁄2",3",4" and 5" capacity unions refer to pages 11-13 and 16-20.DEUBLIN91-847-689-8600 o r w w w .d e u b l i n .c o mG Rotor HolePipe Supplied By CustomerA1/16"R Pipe Length Into UnionD 2Duoflow Length(3) 11/32"Dia. VentsEq.SpacedJLock-up Approx.H Across FlatsSPipe Ø55 & 57 Series Duoflow Union SpecificationsFixed Supply Pipe DetailRotating Supply Pipe Detail———-030.250"43⁄16"—————1⁄4"11⁄16"13⁄8"1⁄4"2#———-030.250"43⁄16"—————1⁄4"11⁄16"13⁄8"1⁄4"2#-120M6X198.5————————1⁄4"18351⁄4"0.9 Kg -0121⁄8"NPT 43⁄4"-061.375"57⁄16"—————3⁄8"11⁄16"11⁄2"3⁄8"3#-0121⁄8"NPT43⁄4"-061.375"55⁄16"-0611⁄8".371"13⁄16"5"3⁄8"11⁄16"11⁄2"3⁄8"3#.370"-199G 1⁄8"(BSP)117———-471—9.93301273⁄8"18383⁄8"1.4 Kg 9.90-0431⁄4"NPT 51⁄4"-075.500"513⁄16"—————1⁄2"1"13⁄4"1⁄2"5#-0441⁄8"NPT 51⁄8"-026.437"-0431⁄4"NPT 51⁄8"-075.500"513⁄16"-0751⁄4".496"11⁄4"511⁄16"1⁄2"1"13⁄4"1⁄2"5#-0441⁄8"NPT 5"-026.437".495"-368G 1⁄4"(BSP)136.5———-681—12.9531146.51⁄2"26451⁄2" 2.3 Kg -367G 1⁄8"(BSP)132.512.90-0833⁄8"NPT 71⁄16"-163.625"71⁄8"—————3⁄4"11⁄16"25⁄16"1⁄2"8#-0841⁄4"NPT 7"-0833⁄8"NPT 71⁄16"-163.625"71⁄8"-1633⁄8".621"11⁄4"7"3⁄4"11⁄16"25⁄16"1⁄2"8#-0841⁄4"NPT7".619"-255G 3⁄8"(BSP)162—-——-347—15.95311753⁄4"27591⁄2" 3.6 Kg 15.90-0071⁄2"NPT 81⁄8"-104.750"81⁄4"—————1"13⁄8"213⁄16"3⁄4"10#-0071⁄2"NPT81⁄8"-104.750"81⁄4"-1041⁄2".745"11⁄2"83⁄16"1"13⁄8"213⁄16"3⁄4"10#.743"-079G 1⁄2"(BSP)185.5———-237—21.9438201.51"35723⁄4" 4.5 Kg 21.89-0133⁄4"NPT 813⁄16"-263 1.000"91⁄8"—————11⁄4"11⁄2"31⁄16"3⁄4"16#-0361⁄2"NPT 83⁄4"-0133⁄4"NPT 93⁄16"-263 1.000"91⁄2"-1443⁄4"1.000"13⁄4"95⁄16"11⁄4"11⁄2"31⁄16"3⁄4"16#-0361⁄2"NPT91⁄8".998"-221G 3⁄4"(BSP)222———-468—25.914424411⁄4"38783⁄4"7.2 Kg 25.81-0133⁄4"NPT 101⁄4"-263 1.000"105⁄8"—————11⁄4"11⁄2"31⁄16"3⁄4"17#-1831"NPT103⁄8"13⁄4"31⁄2"1"-221G 3⁄4"(BSP)243———-468—25.914425011⁄4"38783⁄4"7.7 Kg25.81RKNPTMNO NPTShpg.Wt.Fixed Supply Pipe Fixed Supply TubeElbow SuffixThread R Elbow Suffix TubeODRotating Supply PipeS RElbowSuffixPipe Size PipeDia.D 2Duoflow LengthThread SpecificationPipe Supplied By CustomerOFor Description See Page 10101-847-689-8600 o r w w w .d e u b l i n .c o mThreaded PipeThe largest threaded supply pipe achieves the maximum flow rates available for a particular size union. Stresses at the pipe thread can cause breakage allowing the pipe to fall into the roll. For this reason pipe lengths longer than 4union lengths (4 x D1) and rotational speeds above 1000RPM should be avoided.Fixed TubeThin wall stainless steel tube silver soldered into the Duoflow elbow produces the strongest, lightest weightassembly.The thinner wall sections allow greater flow rates than the threaded pipe. Maximum flow rates are obtained with the largest tube available for a given size union. Tube length is usually limited to 6 union lengths (6 x D1). Speeds to 3500 RPM are possible.Rotating PipeRotating pipes are fastened internally to rotate with the roll.The Duoflow elbow helps to support the pipe and restrict crosstalk between passages. The pipe must be straight and concentric to the center line to avoid excessive loading of the union. The union must also have a rotor with astraight thread (Example 1"-14 UNS) rather than a tapered pipe thread to assure concentricity. Rotational speeds above 1000 RPM should be avoided.Deublin water service unions can be adapted for Duoflow applications where a single media is circulated through and around the supply pipe. Duoflow elbows are available in 3 styles to accept a variety of different supply systems.The guidelines shown below should be carefully considered. A poorly designed supply system can contribute to premature union failure.Where long pipes or high speeds are required, an adapter should be used to avoid transmitting stresses from heavy pipes, cascading water or vibrations to the union. A typical adapter is illustrated.Customer ShaftAdapter*PilotGasketUnionStationary TubeElbowInletOutletRotorGasket*Carbon Filled TFE Bearing*Rotating Pipe**Supplied by customer.Duoflow Supply Pipe InstallationsR EFPipe Supplied by Customer2" NPTD2D1CCast Iron HousingSupply Pipe(Stationary Shown)Stainless Steel SpringDual Ball BearingsOperating DataVent Supply Pipe(Rotating Shown) Dual Ball BearingsDEUBLIN7/8"31/2"J R D 9"Dia.GAFE DC1/16"7/8"3.312"3.307"Dia.DRJ Type I Type II Type III14181814159910413/16"13/16"13/16"13/16"11/16"11/16"7/8"3/16"3/8"7/8"1/4"2Dia.3.430"3.425"Dia.BJH (Across Flats)1/4"27/8"Dia.4.004"4.002"Pilot Dia.(6) 11/16"Dia. Bolt Holeson a 79/16"DBC1Type I Type II Type III 13171714"14991013/16"13/16"15/16"15/16"13/16"11/16"5/16"D RPipe Length Into UnionE FCGPipe Supplied By CustomerA JH (Across Flats)BNOP 3" NPTT -Dia.SRPipe Length Into UnionFlange O-Ring size 2-353857 Series Specifications857-132 Flanged Rotor DetailType I Monoflow857-128 Quick ConnectRotor DetailType IIDuoflow Fixed PipeType IIIDuoflow Rotating Pipe857-000-1013" NPT RH 71⁄2"133⁄4"37⁄16"17⁄8"27⁄8"4"109⁄16"------50#857-000-1023" NPT LH 857-000-118G3" (BSP) RH 190344834473102244------23 Kg 857-000-119G3" (BSP) LH 857-001-1013" NPT RH 71⁄2"177⁄8"37⁄16"17⁄8"27⁄8"4"93⁄4"511⁄16"2"2"1315⁄16"--55#857-001-1023" NPT LH 857-001-118G3" (BSP) RH 1904518344731022281442"2"351--25 Kg857-001-119G3" (BSP) LH 857-002-1013" NPT RH 71⁄2"177⁄8"37⁄16"17⁄8"27⁄8"4"93⁄4"511⁄16"2"-141⁄4"23⁄4" 2.308"55#857-002-1023" NPT LH 2.302"857-002-118G3" (BSP) RH 1904518344731022281442"-3557058.6225 Kg857-002-119G3" (BSP) LH58.47B Port NPTC Dia.D E F G H J NO NPT P NPTR S TShpg.Wt.Ordering Number ARotor Thread 3"T y p e IT y p e I IT y p e I I I2"2"Operating DataDEUBLIN Exclusive On-The-Machine Repair CartridgeCast Iron HousingCast Iron End Cap (nickel-plated)Supply Pipe (Rotating Shown)Composite BearingVentReplaceable Seal CartridgeReplaceable Rotor SealCarbon Steel RotorHeavy-Duty Dual Ball BearingsA Dia.WB.C.PilotDia.JLock-upJLock-upZR Dia.Lug HoleMonoflow Rotating UnionFlanged O-Ring(supplied by DEUBLIN)for:Model O-Ring Size62002-343 Viton62502-343 Viton63002-353 Viton64002-361 Viton6200-001-1236200-016-1232" NPT RH51⁄4"12"215⁄16"11⁄2"17⁄8"95⁄8"27⁄8"39⁄16"31⁄16"1⁄2"––––––2"21# 6200-001-1356200-016-1352" NPT LH6200-001-1376200-016-137G2"(BSP)RH13329563.528.64722873907812.7––––––2"9.5 Kg 6200-001-1396200-016-139G2"(BSP)LH6200-001-1156200-016-1159" O.D.51⁄4"12"31⁄4"1"17⁄8"101⁄4"27⁄8"39⁄16"31⁄16"1⁄2"411⁄16"63⁄8"8.317"–1⁄4"2"32# FLANGE8.315"6250-001-1156250-018-11521⁄2"NPT RH7"145⁄8"31⁄4"17⁄8"23⁄8"12"33⁄4"47⁄16"37⁄8"9⁄16"––––––21⁄2"441⁄2# 6250-001-1196250-018-11921⁄2"NPT LH6250-001-1216250-018-121G21⁄2"(BSP)RH17837182.538.160290951139814.3––––––21⁄2"20.2 Kg 6250-001-1236250-018-123G21⁄2"(BSP)LH6250-001-3006250-018-3009" O.D.7"15"35⁄8"1"23⁄8"1215⁄16"33⁄4"47⁄16"37⁄8"9⁄16"411⁄16"63⁄8"8.317"–1⁄4"21⁄2"59# FLANGE8.315"6300-001-1576300-015-1573" NPT RH9"173⁄16"37⁄8"17⁄8"27⁄8"14"37⁄16"55⁄16"43⁄4"9⁄16"––––––3"98# 6300-001-1586300-015-1583" NPT LH6300-001-1616300-015-161G3"(BSP)RH2294339544.4733358713512114.3––––––3"45.5 Kg 6300-001-1626300-015-162G3"(BSP)LH6300-001-1036300-015-1039" O.D.9"163⁄4"37⁄16"7⁄8"3"141⁄2"37⁄16"55⁄16"43⁄4"9⁄16"611⁄16"79⁄16"4.004"1⁄4"–3"113# FLANGE 4.002"6400-030-3306400-042-330107⁄8"O.D.11"19"3"7⁄8"4"163⁄8"33⁄4"61⁄8"51⁄4"5⁄8"613⁄16"9"4.749".300–4"156# FLANGE 4.746"B Port NPTARotor ThreadC D1E F G LOrdering NumberStandard E.L.S.J M Q R T U W X Y ZNPTPilotDia.Shpg.Wt.21⁄2" 2" 3" 4"Threaded Rotor Flanged RotorNote:Threaded Rotors Not For Calender Service.DEUBLINAA Dia.W B.C.Pilot Dia.GYSupplied By CustomerRPJ Lock-upN Approx.Pipe Dia.ZR Dia.Lug HoleKPipe Length Into Union D 2SL EFXT /UCQME FJ Lock-up6200-002-1236200-030-1232" NPT RH 51⁄4"127⁄8"215⁄16"11⁄2"17⁄8"8"105⁄8"27⁄8"6200-002-1356200-030-1352" NPT LH 6200-002-1376200-030-137G2" (BSP)RH 13331463.528.647189260736200-002-1396200-030-139G2" (BSP)LH6200-002-1156200-030-1159" O.D.51⁄4"133⁄16"31⁄4"1"17⁄8"85⁄8"1015⁄16"27⁄8"FLANGE 6250-002-1156250-030-11521⁄2"NPT RH 7"157⁄8"31⁄4"17⁄8"23⁄8"93⁄4"1213⁄16"33⁄4"6250-002-1196250-030-11921⁄2"NPT LH 6250-002-1216250-030-121G21⁄2"(BSP)RH 17840382.538.160228.6325956250-002-1236250-030-123G21⁄2"(BSP)LH6250-002-3006250-030-3009" O.D.7"161⁄4"35⁄8"1"23⁄8"109⁄16"131⁄2"33⁄4"FLANGE 6300-002-1576300-030-1573" NPT RH 9"20"37⁄8"17⁄8"27⁄8"121⁄4"163⁄8"37⁄16"6300-002-1586300-030-1583" NPT LH 6300-002-1616300-030-161G3" (BSP)RH 2295059544.473288.9412876300-002-1626300-030-162G3" (BSP)LH6300-002-1036300-030-1039" O.D.9"199⁄16"37⁄16"7⁄8"3"123⁄4"16"37⁄16"FLANGE 6400-031-3306400-051-330107⁄8"O.D.11"213⁄8"3"7⁄8"4"133⁄4"171⁄2"33⁄4"FLANGE6200-011-1236200-040-1232" NPT RH 51⁄4"127⁄8"215⁄16"11⁄2"17⁄8"8"101⁄8"27⁄8"6200-011-1356200-040-1352" NPT LH 6200-013-1376200-020-137G2" (BSP)RH 13331463.528.647189246736200-013-1396200-020-139G2" (BSP)LH6200-011-1156200-040-1159" O.D.51⁄4"133⁄16"31⁄4"1"17⁄8"85⁄8"101⁄16"27⁄8"FLANGE 6250-006-1156250-040-11521⁄2"NPT RH 7"157⁄8"31⁄4"17⁄8"23⁄8"93⁄4"13"33⁄4"6250-006-1196250-040-11921⁄2"NPT LH 6250-025-*******-035-121G21⁄2"(BSP)RH 17840382.538.160228.6330956250-025-*******-035-123G21⁄2"(BSP)LH6250-006-3006250-040-3009" O.D.7"161⁄4"35⁄8"1"23⁄8"109⁄16"133⁄8"33⁄4"FLANGE 6300-006-1576300-040-1573" NPT RH 9"20"37⁄8"17⁄8"27⁄8"121⁄4"161⁄16"37⁄16"6300-006-1586300-040-1583" NPT LH 6300-025-*******-035-161G3" (BSP)RH 2295059544.473288.9404876300-025-*******-035-162G3" (BSP)LH6300-006-1036300-040-1039" O.D.9"199⁄16"37⁄16"7⁄8"3"123⁄4"1637⁄16"FLANGE 6400-024-3306400-054-330107⁄8"O.D.11"213⁄8"3"7⁄8"4"133⁄4"17"33⁄4"FLANGEB &O Port NPTACD 2EFGJStandardE.L.S.KL(2) x 1"(2) x 2"(2) x 11⁄2"(2) x 21⁄2"(2) x 1"(2) x 2"(2) x 11⁄2"(2) x 21⁄2"Duoflow Rotating Pipe ModelsB &O Port NPTACD 2EFGJStandardE.L.S.KLDuoflow Fixed Pipe ModelsFlanged/Threaded Duoflow Rotating PipeDEUBLINFPON Approx.BZMJ Lock-upYK Pipe Length Into UnionD2LR Dia. Lug HoleT /U QE FXA Dia.Pilot Dia.W B.C.AJ Lock-upE FSupplied By Customer39⁄16"33⁄8"1" 1.245"1"31⁄16"1⁄2"11⁄2"––––––2"29#1.240"90861"31.621"7812.738––––––2"13.2 Kg 31.4939⁄16"33⁄8"1" 1.245"1"31⁄16"1⁄2"11⁄2"411⁄16"63⁄8"8.317"–1⁄4"2"40#1.240"8.315"47⁄16"41⁄16"11⁄2" 1.867"11⁄2"37⁄8"9⁄16"15⁄8"––––––21⁄2"551⁄2#1.865"11310311⁄2"47.4211⁄2"9814.341––––––21⁄2"25.2 Kg 47.3747⁄16"41⁄16"11⁄2" 1.867"11⁄2"37⁄8"9⁄16"15⁄8"411⁄16"63⁄8"8.317"–1⁄4"21⁄2"70#1.865"8.315"55⁄16"53⁄16"2" 2.308"2"43⁄4"9⁄16"23⁄4"––––––3"105#2.302"1351322"58.622"12114.370––––––3"47.7 Kg 58.4755⁄16"53⁄16"2" 2.308"2"43⁄4"9⁄16"23⁄4"611⁄16"79⁄16" 4.004"1⁄4"–3"120#2.302" 4.002"61⁄8"53⁄4"21⁄2"2.745"21⁄2"51⁄4"5⁄8"21⁄2"613⁄16"9"4.749".300"–4"168#2.742"4.746"39⁄16"33⁄8"1"1"31⁄16"1⁄2"–––-––2"29#NPT 90861"G1"7812.7––––––2"13.2 Kg (BSP)39⁄16"33⁄8"1"1"31⁄16"1⁄2"411⁄16"63⁄8"8.317"–1⁄4"2"40#NPT 8.315"47⁄16"41⁄16"11⁄2"11⁄2"37⁄8"9⁄16"––––––21⁄2"551⁄2#NPT 11310311⁄2"G11⁄2"9814.3––––––21⁄2"25.2 Kg (BSP)47⁄16"41⁄16"11⁄2"11⁄2"37⁄8"9⁄16"411⁄16"63⁄8"8.317"–1⁄4"21⁄2"70#NPT 8.315"55⁄16"53⁄16"2"2"43⁄4"9⁄16"––––––3"105#NPT 1351322"G2"12114.3––––––3"47.7 Kg (BSP)55⁄16"53⁄16"2"2"43⁄4"9⁄16"611⁄16"79⁄16" 4.004"1⁄4"–3"120#NPT 4.002"61⁄8"53⁄4"21⁄2"21⁄2"51⁄4"5⁄8"613⁄16"9"4.749".300"–4"168#NPT4.746"T U WPilot Dia.X YZ NPT Shpg.Wt.M NO NPT Pipe Dia.RP Q RS MNO NPTFPQRTUWPilot Dia.XYZ NPTShpg.Wt.Flanged/Threaded Duoflow Fixed PipeOperating Data Maximum Water Pressure x230 PSI16 bar x1,000 RPM1,000/min Maximum SpeedOperating DataOperating DataMaximum Saturated Steam Pressure x 150 PSI 10 bar Stainless Steel SpringSiphon Pipe SupportRemovable Duo AdapterSupply or Return Pipe (Stationary Shown)One Piece Nickel-PlatedSteel RotorSteel End CapBearingC GAERotor HoleS Dia.T Spanner Wrench Hole CenterJApprox. Lock-UpBMQKGB.S.P . Rotor DetailAJ Lock-Up HAcross FlatsRotor HoleFE1/16"J Lock-Up Quick Detail Rotor ConnectG EF1/16"Rotor HoleF 1F 2F 3D 1Approx. MonoflowLengthPT orque Restraining Rod HoleR9075-001-1069075-020-1243⁄4"NPT RH37⁄16"6"85⁄8"17⁄8"––––21⁄32"–49⁄16"1"9075-001-1079075-020-1253⁄4"NPT LH9075-001-1179075-020-128QUICK37⁄16"6"85⁄8"17⁄8"7⁄16"1.025.95511⁄16"21⁄32"–41⁄2"1"CONNECT 1.020.9509075-029-*******-030-126G 3⁄4"(BSP)RH 871532194819–––16.6251081"9075-029-*******-030-127G 3⁄4"(BSP)LH 9100-001-1039100-020-2201" NPT RH 313⁄16"71⁄4"97⁄8"23⁄8"––––1"–53⁄8"1"9100-001-1099100-020-2211" NPT LH9100-001-1219100-020-213QUICK313⁄16"71⁄4"97⁄8"23⁄8"7⁄16"1.274 1.21611⁄16"1"–57⁄16"1"CONNECT 1.269 1.2119100-027-*******-045-211G1" (BSP)RH971842516022–––25321281"9100-027-*******-045-212G1" (BSP)LH9125-001-1099125-020-13911⁄4"NPTRH 47⁄16"81⁄8"111⁄8"21⁄2"––––11⁄4"–57⁄8"11⁄2"9125-001-1109125-020-14011⁄4"NPT LH9125-001-1269125-020-141QUICK47⁄16"77⁄8"107⁄8"21⁄4"1⁄2"1.615 1.5623⁄4"11⁄4"–57⁄8"11⁄2"CONNECT 1.610 1.5579125-015-1189125-030-137G11⁄4"(BSP)RH1122062826425–––323813811⁄2"9125-015-1199125-030-138G11⁄4"(BSP)LH 9150-001-1039150-020-19511⁄2"NPT RH51⁄4"9"125⁄8"21⁄2"––––11⁄2"–65⁄8"11⁄2"9150-001-1049150-020-19611⁄2"NPT LH9150-001-1179150-020-199QUICK51⁄4"9"125⁄8"21⁄2"1⁄2"1.865 1.7757⁄8"11⁄2"–65⁄8"11⁄2"CONNECT 1.860 1.7709150-018-1139150-031-197G11⁄2"(BSP)RH1332293206428–––384615411⁄2"9150-018-1149150-031-198G11⁄2"(BSP)LH9200-001-1029200-020-1122" NPTRH 63⁄32"101⁄16"137⁄16"25⁄8"––––115⁄16"–75⁄32"11⁄2"9200-001-1119200-020-1132" NPT LH9200-001-1219200-020-122QUICK63⁄32"107⁄16"133⁄16"3"5⁄8"2.320 2.2307⁄8"115⁄16"–77⁄16"11⁄2"CONNECT 2.315 2.2259200-029-*******-030-119G2" (BSP)RH1542553416730–––496016611⁄2"9200-029-*******-030-120G2" (BSP)LHB PortARotor ThreadC D 1D 2E F F 1F 2F 3GH JK NPTOrdering NumberSteam Service Hot Oil Service G 3⁄4"(BSP)3⁄4"NPT 1"NPTG1"(BSP)11⁄4"NPTG11⁄4"(BSP)11⁄2"NPTG11⁄2"(BSP)2"NPTG2"(BSP)9000 Series Monoflow Union Specifications。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Axial Connection
E D E
Radial Connection
D
ØF
ØC
ØF
ØG
A
B P A P B
Ordering Number 1114-710-717 Axial 1114-927-930 1114-929-930 Radial 1114-926-930 1114-928-930
B C D P Supply Overall Housing Vent Size Connection Diameter Length Ø (3 x 120°) G 3/8 G 1/4 G 1/4 G 1/4 G 1/4 59 48 48 48 48 111 95 95 95 95 G 1/4 G 1/4 G 1/4 G 1/4 G 1/4
• Single passage for both coolant and dry air • Patent-pending “AutoSense” technology automatically changes between closed seals and controlled leakage operation in response to the kind of media • Bore-mounted design for easy installation • Accepts up to 19 mm of axial drawbar movement • Matched, ISO class P4 hybrid ball bearings for smooth operation at high speeds • Labyrinth system and large vents to protect ball bearings • Full-flow design has no obstructions to trap swarf or debris • Balanced mechanical seals made from silicon carbide for long life even under difficult operating conditions • Anodised aluminium and stainless steel parts resist corrosion
A Rotor Connection Hexagon 12 D10 Octagon 7.4 D10 Octagon 7.4 D10 Octagon 7.4 D10 Octagon 7.4 D10
E Rotor Length 25 19.5 19.5 19.5 19.5
F G I Rotor Bore Pilot Overall Diameter Diameter Diameter 18 15.4 15.4 15.4 15.4 11 h7 8.1 f9 8.1 f9 8.1 f9 8.1 f9 48 g6 48 h7 48 h7 48 h7 48 h7
Operating Data
Media Filtration Max. Speed Max. Pressure Max. Flow Max. Temperature Water-based Coolant MQL (oil mist) up to 10 bar (145 psi) Air up to 10 bar (145 psi) ISO 4406 Class 17/15/12, max. 60 micron 22.000 min-1 22,000 rpm see chart 21.6 gpm Standard 82 l/min 24,3 l/min 6.4 gpm High Pressure 70°C 160°F
140
Coolant Pressure (bar)
120 100 80 60 40 20 0 0 5 10 15 20 25 30 35 40
Speed (rpm x 1,000) 1114-928-930, 1114-929-930 1114-710-717 1114-926-930, 1114-927-930
D
ØG
ØG
ØC
B H P H B P
Ordering Number 1114-011-165 1114-021-188 Standard 1114-041-188 1114-020-188 1114-040-188 1114-014-196 High Pressure 1114-024-212 1114-044-212 1114-023-212 1114-043-212
ØG
Max. Speed (rpm) 24,000 36,000 24,000 36,000 24,000
Max. Pressure (bar) 80 105 105 105 105
ØC
ØI
ØI
DEUBLIN
19
Coolant Pressure (bar)
140 120 100 80 60 40 20 0 0 5.000 10.000 15.000 20.000
Speed (rpm) High Pressure Standard
Axial Connection
D E F M F E M
Radial Connection
C D P Overall Overall Vent Size Diameter Length Ø (3 x 120°) 53 53 53 53 53 53 53 53 53 53 53 53 134 131 131 140 137 137 134 131 131 140 137 137 1/4 NPT G 1/4 1/4 PT 1/4 NPT G 1/4 1/4 PT 1/4 NPT G 1/4 1/4 PT 1/4 NPT G 1/4 1/4 PT
A Rotor Connection 5/8-18 UNF LH M16 x 1.5 LH M16 x 1.5 LH 5/8-18 UNF LH M16 x 1.5 LH M16 x 1.5 LH 5/8-18 UNF LH M16 x 1.5 LH M16 x 1.5 LH 5/8-18 UNF LH M16 x 1.5 LH M16 x 1.5 LH
I Pilot Diameter
ØC
ØI
ØI
A
A
M Pilot Length 5 5 5 5 5 5 5 5 5 5 5 5
15/16" 0.6555" / 0.6553" 17.993 / 17.988 17.993 / 17.988 17.993 / 17.988 17.993 / 17.988 17.993 / 17.988 17.993 / 17.988 17.993 / 17.988 17.993 / 17.988
1114-010-165 3/8 NPT Radial
15/16" 0.6555" / 0.6553"
15/16" 0.6555" / 0.6553"
1114-013-196 1/4 NPT Radial
15/16" 0.6555" / 0.6553"
18
DEUBLIN
1114 Series “AutoSense” Bore-Mounted Rotating Unions for Coolant and Air Service and Dry Running
B Supply Connection 3/8 NPT Axial G 3/8 Axial 3/8 PT Axial G 3/8 Radial 3/8 PT Radial 1/4 NPT Axial G 3/8 Axial 1/4 PT Axial G 1/4 Radial 1/4 PT Radial
DEUBLIN
1114 Series “AutoSense” Rotor-Mounted Rotating Unions for Coolant and Air Service and Dry Running
• Single passage for both coolant and dry air • Patent-pending “AutoSense” technology automatically changes between closed seals and controlled leakage operation in response to the kind of media • Dual ABEC 7 (ISO class P4) angular contact ball bearings • Threaded rotor for easy installation • Full-flow design has no obstructions to trap swarf or debris • Labyrinth system and large vents to protect bearings • Balanced mechanical seals made from silicon carbide for long life even under difficult operating conditions • Aluminium housing, endcap anodised resists corrosion
E F G H Rotor Thread Bore Across Length Length Diameter Flats 34 31 31 34 31 31 34 31 31 34 31 31 14 11 11 14 11 11 14 11 11 14 11 11 9 9 9 9 9 9 9 9 9 9 9 9 24 24 24 24 24 24 24 24
Operating Data
Water-based Coolant MQL (oil mist) up to 10 bar (145 psi) Air up to 10 bar (145 psi) Filtration ISO 4406 Class 17/15/12, max. 60 micron Max. Speed see chart/table Max. Pressure see chart/table Max. Flow 1114-710-717 82 l/min 21.6 gpm 1114-92x-930 24,3 l/min 6.4 gpm 70°C 160°F Max. Temperature Media