《凯奇伺服用户手册》word版
伺服驱动说明书V2[1].7-090511
![伺服驱动说明书V2[1].7-090511](https://img.taocdn.com/s3/m/796a274933687e21af45a931.png)
TYPE:
产品型号
F8-N-3T-0075
第二章 安装及电路
2
2.1.1
伺服驱动器要安装于室内通风良好的场所,并采用垂直安装方式,以其它方式安装会降低其散热效果并导致功能异常。
安装时要与相邻物品或挡板(墙)保持足够的空间,如下图所示:
5cm5cm
2.1.2
环境温度:-10℃~50℃
确认环境温度是在技术条件温度范围内。当伺服驱动器安装在发热设备附近时,其环境温度将升高。当伺服驱动器装在封闭装置内时,其环境温度会升高得很快,导致伺服驱动器使用寿命缩短。如果你想将伺服驱动器装进封闭装置内,请仔细考虑冷却方法及尺寸。
使用安全注意事项分为:
危险:如果未按说明操作,可能会造成伺服驱动器损坏或人员伤亡。
注意:如果未按说明操作,可能会造成伺服驱动器损坏。
1.1.1安装与配线
危险:
1、将伺服驱动器安装在金属等不可燃物体上。
2、不要将伺服驱动器安装在有爆炸气体的环境里。
3、不要将伺服驱动器安装在易燃物品附近。
4、确保伺服驱动器的额定电压与交流电源的供电电压相匹配。
2、在设置伺服驱动器的速度(运行速度或最高速度)时,请先确认电机和机器允许的速度范围。
3、仅在允许的环境温度变化(-10℃~+50℃)范围内使用伺服驱动器:由于伺服驱动器的寿命在很大程度上受环境温度的影响,使用时不要超出技术规范要求,此外应注意安装方向及条件。
4、不要对伺服驱动器电缆间进行绝缘测试:要测量电源电缆或电机电缆的绝缘电阻,请先将它们与伺服驱动器断开。绝对不允许对控制电路进行绝缘测试。
6输出端噪声滤波器:
减小伺服驱动器输出端造成的噪声。
7输出端AC电抗器:
通过平滑电源波形来减小由于伺服驱动器开关波形造成的电机振动。当伺服驱动器和电机之间接线超过50米时也可以抑制谐波。
Quick 8802 系列数控伺服控制系统使用说明书
Quick 8802 系列数控伺服控制系统使用说明书 Digital Servo Control System Operation Manual安全操作指南 General safety instructions在使用前,一定要仔细阅读本操作指南与所搭配的缝制机械说明书,配合正确使用,并须由接受过专业培训的人员来安装或操作。
在使用或安装本机器时,请注意下列事项。
Please read this manual carefully, also with related manual for the machine head before use. For perfect operation safety , i nstalling and operating this product by trained personnel is required. When install and operate this product, precaution must be taken as following.1 .请尽量远离电弧焊接设备或电波发射器等,以免产生的电磁波干扰本控制器而发生误动作。
2 .请不要在室温 45 °C 以上或者 0 °C 以下的场所使用。
3 . 请不要在湿度 30 % 以下或者 95 % 以上或者有露水和酸雾的场所使用。
4 .安装控制箱及其他部件时,请先关闭电源并拔掉电源插头。
5 .为防止干扰或漏电事故,请做好接地工程,电源线的接地线必须以牢固方式与大地有效连接。
6 .所有维修用的零部件,须由本公司提供或认可,方可使用。
7 .修理及保养作业,要请经过培训的技术员执行。
在进行任何保养维修动作前,必须关闭电源并拔掉电源插头。
控制箱里有高压危险,必须关闭电源五分钟后方可打开控制箱。
8 .本手册中标有 符号之处为安全注意点,必须注意并严格遵守,以免造成不必要的损害。
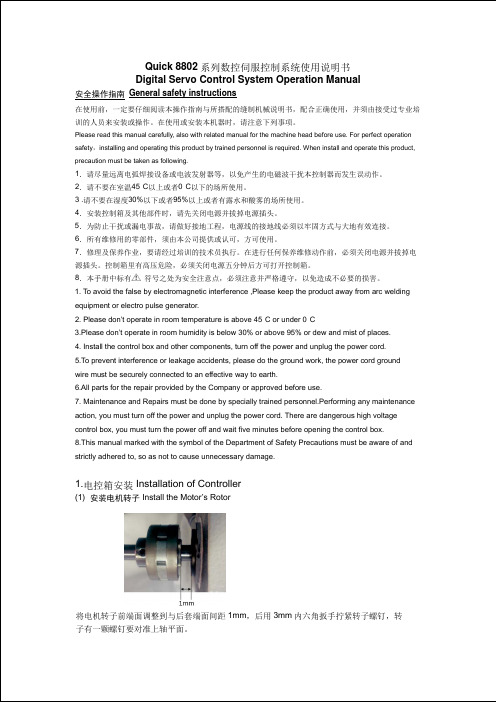
. To avoid the false by electromagnetic interference ,Please keep the product away from arc welding 1 equipment or electro pulse generator.2 . Please don’t operate in room temperature is above 45°C or under 0°C ·3 .Please don’t operate in room humidity is below 30% or above 95% or dew and mist of places.4 . Install the control box and other components, turn off the power and unplug the power cord.5 .To prevent interference or leakage accidents, please do the ground work, the power cord ground wire must be securely connected to an effective way to earth.6 .All parts for the repair provided by the Company or approved before use.7 . Maintenance and Repairs must be done by specially trained personnel.Performing any maintenance action, you must turn off the power and unplug the power cord. There are dangerous high voltage control box, you must turn the power off and wait five minutes before opening the control box. 8 .This manual marked with the symbol of the Department of Safety Precautions must be aware of and strictly adhered to, so as not to cause unnecessary damage.1. 电控箱安装 Installation of Controller(1) 安装电机转子 Install the Motor’s Rotor将电机转子前端面调整到与后套端面间距1mm ,后用3mm 内六角扳手拧紧转子螺钉,转 子有一颗螺钉要对准上轴平面。
MK4说明书

MkIV Elektronikon controller for Ingersoll Rand Centac compressors阿特拉斯·科普柯MkIV Elektronikon controller for Ingersoll Rand Centaccompressors使用说明书版权公告未经许可,禁止使用或复制本手册中所含的全部或任何一部分内容。
本公告特别适用于本手册所含的商标、型号名称、零件代号和图纸。
此使用说明书符合机械指令 98/37/EC 规定的说明要求,同时适用于 CE 机器和未标记 CE的机器。
2008 - 01No. 2991 1686 00使用说明书目录1安全措施 (5)1.1安全图标 (5)1.2安装过程中的安全措施 (5)1.3操作过程中的安全措施 (6)1.4保养或维修过程中的安全措施 (7)2概述 (9)2.1简介 (9)2.2电气系统 (9)2.3E LEKTRONIKON 电脑控制器 (13)2.4控制压缩机流量 (13)2.5保护压缩机 (14)2.6监控保养构件 (15)2.7检查起动条件 (16)2.8控制润滑油系统 (16)2.9最小停机时间内的起动命令 (16)2.10断电后自动重新起动 (16)2.11压缩机状态的外部指示 (16)2.12BUS 连接系统 (17)3Elektronikon 电脑控制器 (18)3.1控制面板 (18)3.2菜单驱动型控制程序 (20)3.3主屏幕 (23)3.4查阅其它菜单 (24)3.5快速查看压缩机的实际状态 (25)3.6返回至主屏幕和其它菜单 (26)3.7主屏幕菜单 (27)使用说明书3.8状态数据菜单 (27)3.9测量数据菜单 (31)3.10计数器菜单 (32)3.11测试菜单 (34)3.12修改参数菜单 (35)3.13修改参数 (35)3.14修改压力设定值 (36)3.15修改保护 (38)3.16修改齿轮箱油压的停机/报警设置 (39)3.17修改保养计划 (40)3.18设定时钟功能 (41)3.19修改配置设置 (45)3.20保养菜单 (47)3.21存储数据菜单 (49)4安装 (51)4.1电气连接 (51)4.2图标 (55)5操作说明 (57)5.1操作简介 (57)5.2初次开机的准备工作 (57)5.3压缩机控制模式 (61)5.4起动前 (61)5.5常规起动 (62)5.6紧急停机或停机后起动 (63)5.7电动机起动次数 (64)5.8操作过程中 (64)5.9检查显示屏 (65)5.10手动控制压缩机运行 (65)使用说明书5.11停机 (66)6维护 (68)6.1保养警告 (68)6.2预防性保养计划 (68)7故障排除 (70)7.1故障排除 (70)8可设定的设置值 (72)8.1设置 (72)8.2调节设置 (72)8.3保护设置 (73)8.4保养设定 (75)使用说明书1安全措施1.1安全图标解释1.2安装过程中的安全措施Array一般预防措施1.操作员必须遵循安全操作准则,并遵守当地所有相关的工作安全要求及规定。
伺服说明书v
Ver 2.0克瑞斯伺服驱动器使用手册台州亿丰电子有限公司1.1 产品检查 (1)1.2 产品铭牌 (2)1.3 产品前面板 (2)1.4 驱动器技术规格 (4)1.5 伺服电机安装 (4)第二章接线 (5)2.1 系统组成与接线 (5)2.2 CN1 通信接口 (8)2.3 CN2 控制接口 (9)2.4 CN3 编码器接口 (14)2.3 标准接线 (15)第三章面板操作 (16)3.1 面板组成 (16)3.2 模式功换 (17)3.3 监控模式操作 (18)3.4 辅助模式操作 (18)3.5 用户参数模式操作 (22)第四章功能参数一览表 (23)4.1 参数设置面板操作 (23)4.2 参数一览表 (23)5.1 监控面板操作 (32)5.2 监控参数一览表 (32)第六章报警及处理 (33)6.1 报警清除操作 (33)6.2 警报内容与对策表 (34)第七章 MODBUS 通信功能 (36)7.1 MODBUS 通信简介 (36)7.2 通信协议结构 (38)7.3 常用命令码 (39)7.4 伺服参数、状态信息通信地址 (47)附录 (47)附录 A 位置/速度控制模式切换 (48)附录 B 内部位置控制 (48)附录 C 输入功能控制方式选择寄存器 (50)附录 D 输入功能逻辑状态设置寄存器 (51)附录 E 输出功能状态寄存器 (51)第一章产品检查及安装1.1 产品检查本产品在出厂前均做过完整功能测试,为防止产品运送过程中因疏忽导致产品不正常,拆封后请详细检查下列事项:● 检查伺服驱动器与伺服电机型号是否与订购的机型相同。
● 检查伺服驱动器与伺服电机外观有无损坏及刮伤现象。
运送中造成损伤时请勿接线送电。
● 检查伺服驱动器与伺服电机有无零组件松脱之现象。
是否有松脱的螺丝,是否螺丝未锁紧或脱落。
● 检查伺服电机转子轴是否能以手平顺旋转。
带制动器的电机无法直接旋转。
如果上述各项有了生故障或不正常的现象,请立即与经销商联系。
MOTEC α系列伺服使用手册v1.1
使用手册
(V1.0)
SED 型伺服驱动器 SEM 型伺服电机
北京意美德科技发展有限公司 地址: 北京市东城区东中街 58 号美惠大厦 B 座 703A 邮编: 100027 电话: 010-65542170、65546546、65542692 传真: 010-65546721 65547015 网址:
α系列伺服电机系统使用手册
章 节:
第 1 章. 伺服电机与驱动器型号 第 2 章. 安装和配线 第 3 章. 驱动器 JP2 接口(I/O 控制信号)功能说明 第 4 章. 面板操作操作说明 第 5 章. 性能调整功能说明 第 6 章. 控制模式 第 7 章. 监视项 第 8 章. 伺服驱动器工作时序图 第 9 章.驱动器 JP3/JP4(通信端口)定义、接线及通信协议 附录 1: 驱动器参数列表 附录 2:故障信息、故障原因及处理措施 附录 3:SEM 电机电气参数
1. 伺服电机与驱动器型号 ................................................................. 5 1.1 伺服电机型号定义 ................................................................. 5 1.2 伺服驱动器型号定义 ............................................................... 6 1.3 α系列驱动器与电机组合 ........................................................... 6 1.4 α系列驱动器外形及安装尺寸图 ..................................................... 8
KINCO ED系列伺服驱动器使用手册
1Байду номын сангаас
KINCO ED 系列伺服驱动器使用手册
5.1 对象词典(OBJECT DICTIONARY) ............................................................. 36 5.2 对象操作表(DIRECT OBJECT ENTRY) ......................................................... 36 5.3 设备控制(DEVICE CONTROL) ............................................................... 37
2.5.1 使用原则 ........................................................................... 7 2.5.2 使用环境 ........................................................................... 8 2.5.3 安装要求 ........................................................................... 8 2.5.4 电气连接前要求 ..................................................................... 8 2.5.5 操作 ............................................................................... 8
伺服控制说明书

伺服控制说明书一、产品基本信息咱这个伺服控制呢,就是一种超酷的控制系统哦。
它主要是用来精确控制电机的运转的。
就像是一个超级智能的小管家,能让电机按照咱们想要的速度、位置啥的进行工作。
这个伺服控制可是由好多厉害的部件组成的呢,比如说有控制电路呀,还有专门的驱动器之类的,它们相互配合,就像一个团队一样,共同完成对电机的控制任务。
二、技术参数规格1. 电压方面呢,它有一个特定的范围,比如说可以在110V - 220V之间正常工作,这就像人有个适合自己生存的环境温度范围一样。
2. 功率也是有不同的规格的哦。
小功率的可能适用于一些小型的设备,像小型的风扇电机控制之类的。
大功率的呢,就能搞定那些大型的工业设备啦,像大型机床的电机控制。
功率可能从几十瓦到几千瓦都有呢。
3. 再说说它的控制精度,那可真是相当高呢。
它可以精确到小数点后面好几位,就像你能精确地数清楚你口袋里的每一分钱一样。
比如在位置控制的时候,误差可能只有零点几个毫米,是不是很厉害呀?三、使用范围与方法1. 使用范围这个伺服控制在好多地方都能派上用场。
在工业领域那是必不可少的,像工厂里的自动化生产线,那些机械臂的精确运动就靠它啦。
还有在机器人领域,不管是工业机器人还是服务机器人,要想让它们的关节灵活转动,也得靠这个伺服控制。
在一些智能家居设备里也有它的身影哦,比如说智能窗帘的开合控制,如果没有它,窗帘可能就不能那么精准地按照你的要求打开或者关闭啦。
2. 使用方法首先呢,你得把它和电机正确地连接起来,就像给手机充电要插对接口一样重要。
连接的时候要注意线路的接法,可不能接错啦,不然可能会出问题的。
然后呢,你要根据实际的需求对它进行一些参数设置。
比如说你想要电机以多快的速度转动,就把速度参数设置好。
如果是位置控制,那就得把目标位置的参数设置准确。
这些参数设置一般可以通过专门的软件或者控制面板来操作,操作的时候就按照界面上的提示一步一步来就行啦,就像玩游戏按照游戏规则玩一样简单。
工业缝纫机伺服控制器用户手册说明书

工业缝纫机伺服控制器用户手册前言注意: 使用前请详细阅读本用户手册及所搭配的缝制设备说明书,配合正确使用,并须由接受过专业培训的人员来安装或操作。
本产品仅适用于指定范围的缝制设备,请勿移做其他用途。
本公司拥有对此用户手册的最终解释权。
使用中若存有任何疑问或对我们的产品及服务有任何意见或建议,请随时与我们联系。
安全说明1)安装和调试前,请仔细认真地阅读本手册。
2)本手册中标有符号之处为安全注意点,必须特别注意并严格遵守,以免造成不必要的损害。
3)本产品须由受过专业培训的人员来安装或操作。
4)确保电源安全接地并符合产品铭牌上标示的电压范围及技术要求。
第 1 页共 8 页第 2 页 共 8 页5) 接通电源开关时,请把脚离开脚踏板。
6)在进行以下操作时,必须先断开系统电源:■ 安装机器时;■ 在控制箱上插拔任何连接插头时; ■ 穿针线,换机针及翻抬机头时; ■ 机器休息不用及修理或调整时。
7) 拧紧所有紧固件,以防止缝制作业时产生振动或停针位置错位等异 常现象。
8) 每次关闭控制系统后再次启动,应相隔30秒以上。
9) 设置系统控制参数或进行保养修理工作应由受过相关培训的专业人 员来完成。
10) 维修所用的所有零部件,必须由本公司提供或认可,方能使用。
11) 接地线的安装(特别注意)。
注意:安装控制器时必须正确接地,否则将导致控制器无法正常工作,更严重的可能会被电击(详见安装章节)。
1. 产品介绍 1.1 概述此系列工业缝纫机数控交流伺服系统,电机与控制器分体吊装,使配置组合灵活方便,电机与控制器可按需搭配,实现多种缝纫机对功率、速度等的配套要求;安装简易、调整便捷、力矩大、体积小、噪音低、效率高(省电!);采用开关电源供电,使其具有更宽的电压适配范围;电磁铁侧面接插,使连接更可靠,避免油渍污染引起的控制器故障;优化交流伺服电机控制策略,使转速控制精度高,停针速度快;专利设计的吊装方式使安装更简捷,整体震动降至最低,系统运行更平稳;具有电磁铁回路短路保护功能,防止错误接线损坏控制器。
伺服驱动器中文说明书
1.系统描述...................................................................................................................................- 3 -1.1系统布局图.......................................................................................................................................................- 4 -1.2基本原理...........................................................................................................................................................- 5 -1.3设备说明...........................................................................................................................................................- 6 -1.3.1电动缸DEMxB...........................................................................................................................................- 6 -1.3.2接线盒和电缆..........................................................................................................................................- 8 -1.3.3ACV9BR伺服驱动器...............................................................................................................................- 10 -2.技术规格....................................................................................................................................- 16 -2.1电动缸特性.....................................................................................................................................................- 16 -2.2伺服驱动器的技术特性.................................................................................................................................- 18 -2.3附属设备的技术规格.....................................................................................................................................- 20 -2.3.1主电源变压器........................................................................................................................................- 20 -2.3.2再生电阻RRC.........................................................................................................................................- 20 -2.3.3外部过滤器EFBR...................................................................................................................................- 21 -3.安装和接线.............................................................................................................................- 22 -3.1电动缸在塞棒机构上的安装.........................................................................................................................- 22 -3.1.1塞棒机构的准备....................................................................................................................................- 22 -3.1.1.1 塞棒机构固定件的图纸.....................................................................................................................- 22 -3.1.1.2 DEM电动缸在塞棒机构上的正确安装..............................................................................................- 23 -3.1.1.3塞棒机构间隙和阻力的检查..............................................................................................................- 24 -3.1.2电动缸的安装........................................................................................................................................- 26 -3.1.3塞棒的安装............................................................................................................................................- 27 -3.1.4隔热保护................................................................................................................................................- 28 -3.2.1接线盒JB9BR的安装说明.....................................................................................................................- 30 -3.2.2电缆说明................................................................................................................................................- 30 -3.2.3接线推荐规范和CE标准.......................................................................................................................- 32 -3.2.3.1 屏蔽线的接地.....................................................................................................................................- 32 -3.2.3.2 内部金属导体之间的连接.................................................................................................................- 32 -3.2.3.3 接线盒内的电缆连接.........................................................................................................................- 33 -3.2.3.4 驱动器侧的电缆连接.........................................................................................................................- 34 -3.2.4热区电缆的连接....................................................................................................................................- 35 -3.3驱动器ACV9BR的安装和接线.......................................................................................................................- 36 -3.3.1尺寸........................................................................................................................................................- 36 -3.3.2安装、定位和冷却................................................................................................................................- 37 -3.3.3电源的连接............................................................................................................................................- 39 -4.操作........................................................................................................................................- 40 -4.1手动模式.........................................................................................................................................................- 40 -4.2远程工作模式.................................................................................................................................................- 41 -4.3自动模式.........................................................................................................................................................- 41 -4.4塞棒关闭和安全装置.....................................................................................................................................- 42 -4.4.1塞棒关闭................................................................................................................................................- 42 -4.4.2断开电机电源(可选项).....................................................................................................................- 42 -4.5运行故障的处理.............................................................................................................................................- 43 -5.维护........................................................................................................................................- 44 -5.1检查周期.........................................................................................................................................................- 44 -5.2电动缸的检查和维护.....................................................................................................................................- 45 -5.3推荐的备件.....................................................................................................................................................- 49 -5.4伺服驱动器的故障代码.................................................................................................................................- 53 -5.5故障的数字输出代码.....................................................................................................................................- 57 -5.6驱动器复位和状态显示.................................................................................................................................- 58 -5.7没有报警显示时的故障排除.........................................................................................................................- 59 -6.辅助设备.................................................................................................................................- 61 -6.1DEM系列电动缸的测试台..............................................................................................................................- 61 -6.2塞棒机构MQS..................................................................................................................................................- 61 -1.系统描述SERT的塞棒执行器系统用于控制塞棒和塞棒机构的位置,以控制流入结晶器的钢水的流量。
伺服电机使用手册

4 4.1 安装和配线
------------------------------ 6-7
4.2 BPA4 系列驱动器电气总接线图
------------------------------ 7
4.3 网络连接 4.4 驱动器技术参数 4.5 电机电源线接线定义 4.6 电机编码器接线定义 4.7 控制模式接线 4.8 脉冲输入方式 4.9 脉冲接线图 4.10 开关量信号接线图
否则可能导致触电事故,导致人身伤害
不要堵塞散热孔或插入异物
否则可能导致触电事故,导致人身伤害, 火灾
确保电路接线正确
否则可能导致触电事故,导致人身伤害, 火灾
运动随心,控制所欲
5
伺服电机使用手册
使用前注意事项
!
打开包装后,请确认产品是否与所 定购的产品型号相同
如不相同,请立即联系产品供应商
!
检查产品在运输过程中是否有损 坏
可以用做产量计数70制动器控制字运动随心控制所欲3610伺服电机参数调整与系统分析应用软件标准windows界面界面友好操作方便可以直观快捷的设置参数可采用10进制和16进制两种方式可备份全部设置参数到计算机也可把备份在计算机中的参数导入到驱动器设置的参数可即时本次有效写入内存或一直有效写入eeprom路实时数据采集曲线显示可实时观测指令参考速度实际速度参考电流实际电流等曲线可保存数据采集曲线的波形可显示保存的数据采集曲线波形文件再次分析可以设置触发条件可直接操作驱动器开关量的状态可直接查看驱动器状态寄存器里的数值伺服电机参数调整与系统分析应用软件的使用流程37伺服电机参数调整与系统分析应用软件参数调整运行界面确认修改参数运动随心控制所欲38查看驱动器的实时数据保存采集的曲线波形导入采集的曲线波形运动随心控制所欲3911psda0433a4和psda1033a4输入输出信号的接口定义50pin集电极开路输出集电极开路输出集电极开路输出集电极开路输出集电极开路输出集电极开路输出差分输出差分输出差分输出运动随心控制所欲4012厂家提供的控制信号的接线表低压型驱动器psda0213a3接线表电机接线cn1电源输入cn2电机线驱动器侧驱动器侧直流24dc24vdcdc0vdcfg地线fg控制线接线表jp2脉冲输入信号光耦的两个脚都已引出建议控制器采用差分的脉冲输出管脚号名称定义23dp方向输入24dg方向输入26pp脉冲输入25pg脉冲输入22dicom输入公共端son伺服on15posi定位完成输出16alrout报警输出14dicom输入公共端运动随心控制所欲41标准psda0433a4接线表电机接线cn1制动电阻接线cn2电源输入cn3电机线驱动器侧驱动器侧交流220vac不接任何线控制线接线表jp2脉冲输入信号光耦的两个脚都已引出建议控制器采用差分的脉冲输出管脚号名称定义32dp方向输入33dg方向输入30pp脉冲输入31pg脉冲输入通用数字量输入信号光耦输入二极管的正极已在内部经过一个22k欧姆电阻接12v电源且二极管两端并有一个470欧姆电阻建议控制器采用集电极开路接口形式46a12v内部提供12vdc电源13dicom输入公共端内部已将4613在一起47dicom输入公共端36son伺服onposerrclr位置偏差清除输入草绿37errclr报警清除输入浅灰同一组selsp1速度选择1selsp2速度选择
Cuinsico卡因斯科伺服-HCSE系列用户手册(V1.00)

IV
— 目 录 —
第 1 章...................................................................................................................................................................................................................1 规格型号..................................................................................................................................................................................................................1
HCSE系列交流伺服 用户手册
(V1.00)
宁波和创电子科技有限公司
I
及注意事项
一、安全事项 ■ 安装前 (1)损伤的伺服驱动器及缺件的伺服驱动器请不要使用,否则有受伤的危险。 (2)请使用B级以上绝缘的电机,否则有触电的危险。 ■ 安装时 (1)请安装在金属等阻燃的物体上并远离可燃物,否则可能引起火警! (2)两个以上伺服驱动器置于同一柜中时,请注意安装位置,保证散热效果。 (3)不能让导线头或螺钉掉入伺服驱动器中,否则可能引起伺服驱动器损坏! ■ 配线时 (1)应由专业电气工程人员施工,否则有触电危险! (2)伺服驱动器和电源之间必须有断路器隔开,否则可能发生火警! (3)接线前请确认电源处于关断状态,否则有触电的危险! (4)接地端子必须可靠接地,否则有触电的危险! (5)不能将输入电源线连接到输出端U、V、W,否则会引起伺服驱动器损坏! (6)确保所用导线线径与所选用驱动器的功率相匹配。 ■ 上电前 (1)请确认电源电压等级是否和伺服驱动器额定电压一致;输入、输出的接线位置是否正确,并注意检查外围电路中是否有短 路现象,所连线路是否紧固,否则可能引起伺服驱动器损坏! (2)伺服驱动器无需进行耐压试验,出厂时产品已经做过此项测试,若用户自行测试可能引起事故! (3)确认所有外围配件是否按照本手册所提供电路正确配线。否则可能引起事故! ■ 上电后 (1)上电后不要打开伺服驱动器,否则有触电危险! (2)不要用湿手触摸伺服驱动器及周边电路,否则有触电危险! (3)不要触摸伺服驱动器端子(含控制端子),否则有触电危险! (4)禁止带电插、拔驱动器上的接插件,否则极易损坏驱动器的内部电路和电机编码器! (5)若需要进行参数辨识,请注意电机旋转中伤人的危险,否则可能引起事故! (6)不宜对伺服驱动器的参数进行极端的调整或变更,否则极易引起机械的剧烈震荡,造成不必要的财产损失! ■ 运行中 (1)请勿触摸散热器及制动电阻以试探温度,否则可能引起灼伤! (2)非专业技术人员请勿在运行中检测伺服驱动器信号,否则可能引起人身伤害或设备损坏! (3)不要采用接触器通断的方法来控制伺服电机的启停,否则使得伺服驱动器内部组件迅速老化,降低驱动器的使用寿命,应 使用指令信号来控制伺服电机的运行。 ■ 维修保养时
Kinetix 5500 伺服驅動器使用手冊说明书
Kinetix 5500 伺服驅動器型號 2198-H003-ERS、2198-H008-ERS、2198-H015-ERS、2198-H025-ERS、2198-H040-ERS、2198-H070-ERS、2198-H003-ERS2、2198-H008-ERS2、2198-H015-ERS2、2198-H025-ERS2、2198-H040-ERS2、2198-H070-ERS2、2198-CAPMOD-1300本手冊連結至 Kinetix 5500 伺服驅動器故障碼參考資料,出版物2198-RD005,以供故障碼查詢。
立即下載試算表以離線存取。
2Rockwell Automation 出版品 2198-UM001L-ZC-P - 2022 年 2 月Kinetix 5500 伺服驅動器使用手冊使用者重要資訊進⾏本產品的安裝、設定、操作或維護前,請閱讀本文件及其他資源一節內有關本設備安裝、設定和操作的文件。
使用者除了必須瞭解所有相關法規、法律條文與標準外,還需熟知安裝與配線說明。
舉凡安裝、調整、運作、使用、組裝、拆卸及維護等作業,均需由受訓合格的⼈員依照相關法規進⾏。
若以製造商未提及之方式使用本設備,將可能損害到製造商為本設備所提供的保護措施。
不論任何情況,Rockwell Automation Inc. 對於使用或應用此裝置而產生的間接或連帶損壞,均不負擔任何法律或賠償責任。
本手冊中的範例和圖表皆僅供說明之用。
由於個別安裝會有許多不同的變數及條件,Rockwell Automation,Inc. 無法對依照範例及圖⽰指⽰進⾏的實際使用狀況負責或提供賠償。
關於本手冊中所述之資訊、電路、設備或軟體部分,Rockwell Automation Inc. 概不承擔任何專利責任。
在取得 Rockwell Automation Inc. 書面同意之前,禁止重製本手冊部分或全部內容。
在整本手冊中,我們會在必要時使用註記,讓您瞭解安全注意事項。
伺服驱动器使用说明书

MMT-直流伺服驱动器使用手册济南科亚电子科技有限公司直流伺服驱动器使用说明书一、概述:该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。
二、产品特征:◇PWM控制H桥驱动◇四象限工作模式◇全隔离方式设计◇线形度好、控制精度高◇零点漂移极小◇转速闭环反馈电压等级可选◇标准信号接口输入0--±10V◇开关量换向功能◇零信号时马达锁定功能◇上/下限位保护功能◇使能控制功能◇上/下限速度设定◇输出电流设定功能◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能三、主要技术参数◇控制电源电压AC:110系列:AC :110V±10%220系列:AC :220V±10%◇主电源电压AC:110系列:AC 40----110V220系列:AC50---- 220V◇输出电压DC:110系列:0—130V或其它电压可设定220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A)DC 10A(最大输出电流15A)DC 20A(最大输出电流25A)◇控制精度:0.1%◇输入给定信号:0—±10V◇测速反馈电压:7V/1000R 9.5V/1000R13.5V/1000R 20V/1000R可经由PC板内插片选定并可接受其它规格订制四、安装环境要求:◇环境温度:-5ºC ~ +50ºC◇环境湿度:相对湿度≤80RH。
(无结露)◇避免有腐蚀气体及可燃性气体环境下使用◇避免有粉尘、可导电粉沫较多的场合◇避免水、油及其他液体进入驱动器内部◇避免震动或撞击的场合使用◇避免通风不良的场合使用五、电源输入说明该驱动系统分两路电源输入:即U1、V1为主电源输入,U2、V2为控制电表1注:1、驱动器的主电源(即U1 V1)独立供电时,若电源开路时,驱动器会报警(面板上的T.F灯亮)待故障排出后,驱动器自动回复正常。
伺服电机使用手册
伺服拖动系统使用手册(V1.0)哈尔滨晟普科技有限公司前言感谢您购买晟普科技SP系列抽油机伺服拖动系统。
本使用说明书介绍了如何正确使用SP系列抽油机伺服拖动系统。
在使用(安装、运行、维护、检查等)前,请务必认真阅读本使用说明书。
另外,请在理解产品的安全注意事项后再使用该产品。
与安全有关的标记说明本手册根据与安全有关的内容,使用了下列标记。
有安全标记的说明,表示重要内容,请务必遵守。
表示如果操作错误,将会导致危险情况的发生,造成死亡或重伤。
表示如果操作错误,将会导致危险情况的发生,可能会造成中等程度的受伤或轻伤,或设备损坏。
另外,即使是标识中所述事项,有时也可能会造成严重的后果。
表示不属于“危险”和“注意”,但非常重要,需要用户遵守的事项。
安全注意事项⏹到货时确认◆请勿安装受损或缺少零件的伺服驱动器和电机否则会有受伤的危险。
⏹保管与搬运◆搬运伺服驱动器时轻拿轻放;运输时,确保伺服驱动器包装完好,防止振坏。
◆请勿保管在下述环境中,否则会导致触电、机器损坏或引发火灾:•阳光直射的场所•环境温度超过保管、设置温度条件的场所•相对湿度超过保管、设置湿度条件的场所•有水、油及药品滴落的场所•振动或冲击可传递到主体的场所◆请勿盘坐在本产品上或者在其上面放置重物.否则可能会导致设备故障或人员受伤◆请勿握住电缆线或电机轴进行搬运。
否则会导致设备故障或人员受伤⏹安装◆安装时请轻拿轻放。
◆只有具备资格的电气工程师才允许安装和维护伺服单元。
◆请勿将该产品安装在会溅到水的场所或易发生腐蚀的环境中。
否则可能会导致触电或引发火灾。
◆请勿将该产品安装在易燃性气体及可燃物的附近。
否则可能会导致触电或引发火灾。
◆安装过程中请勿使异物进入产品内部。
否则可能会导致故障或引发火灾。
◆请确保伺服单元与其他机器之间具有规定的间隔。
否则会导致故障或引发火灾。
◆请勿施加过大冲击。
否则可能会导致故障。
◆伺服驱动器外壳必须安全接地。
⏹配线◆请勿在伺服单元的输出端子U、V、W上连接三相AC380V电源。
SERVOPRO FIDK2001说明书
KONTROL ANALYTIKK2001 TRACE GAS ANALYZERUSER’S MANUAL1.0 关于该手册该仪表采用“即插即用”的思路设计,使用简单,本手册也简单易懂,操作仪表时不需要了解电路,软件和物理细节等方面的情况,这正是我们所希望的.我们知道您希望仪表能尽可能快的投入使用,为此请花时间来通读该手册,每一章都假设您已阅读和理解了前面的章节,每一章对用户来说都有重要的内容,仪表非常容易安装和使用并免维护,操作仪表不需特别的技术知识.我们希望您喜欢K2001 氩中微量氮分析仪.为了不断的进步和提高.我们非常感激您提供有建设性的意见,不管是正面的还是负面的. Controle Analytique Inc.公司相信该手册上所述的信息是正确的.本文经过仔细的复查,若有错C.A.公司不须对版本的持有者事先说明.公司保留修改和制作下一版本的权利.若发现错误,请与C.A.公司联系,若因为本文或其包含的信息的缘故造成的损坏,公司将负全部责任.2.0 忠告2.1 谨防触电只有机箱安全关闭,才能进行操作.设备运行时有可能导致高压电,若接触到会使人触电致死或重伤.为了保证仪表的安全和正常运转,交流电源需有地线.维修前报警继电器和数字输出继电器的供电电源需断开.随意更改和替换部件将会影响产品的安全.只能使用厂家许可的部件.2.2 谨防爆炸仪表中除了通氩气外,不能通入其它气体.若易爆,易燃,具腐蚀性的气体或混合气体进入仪表.将会引起起火或爆炸.仪表不能在危险区域使用.仪表只能安装在实验室环境中,即:干燥,无振动以及恒温的环境. 2.3 高压气瓶的搬运和储存该仪表通常用于校验高压气瓶中的气体,气瓶的错误操作会使人致死或重伤,或造成财产损失.搬运气瓶需要格外的细心.参见高压气瓶搬运和储存的注意事项,下面一些注意事项摘自COMPRESSED GAS ASSOCIATION’S HANDBOOK (压缩气体协会手册).1.绝不能摔气瓶或使它们互相剧烈碰撞.2.气瓶可以存放在户外,但在这种条件下,必须避开恶劣天气.地面不能潮湿,以防生锈.3.气瓶未固定时一定要加安全帽.4.要避免拖,滚,滑气瓶,即使是一小段距离也不行,需要移动时,应使用合适的手推车.5.不要更改阀或气瓶的安全装置.6.不要把满的和空的气瓶放在一起,当空的气瓶接在增压系统中时,将发生严重的倒吸现象.7.气瓶温度不得超过1250F(520C),压缩气瓶的任何部分不得接近火焰.8.不得把气瓶接在电路上.电焊时小心电弧溅向气瓶.2.4 安全说明为避免触电,请别移动机箱或打开后盖.用户不要对机器内部进行修理,修理应由专家进行.为避免起火或触电,设备要防雨和防潮.贴有闪电符号的部件表面有电,不要触摸它,否则有触电危险.1. 第一次使用设备前务必要阅读操作手册中的安全说明和操作说明.手册应放好,以备将来使用.2. 安全警告:留意设备及手册上的安全警告,按照其要求操作.3. 水和水蒸气:不要有水的环境中使用,如浴室,水盆,下水道,洗衣机,游泳池附近或是潮湿的地下室内.4. 通风:无论设备放在那里,都需通风.不要置于床上,沙发,地毯或类似易堵住散热孔的物体上.要确保通风以免过热,5. 热效应:不要把设备置于热源附近,如电热器,暖气,炉等.6. 电源:电源必须是机器上或操作手册上指定的电源.7. 电源插座:注意电线,防止践踏,任何东西不得靠近电线,尤其要注意插头,插座以及供电处附近区域.8. 吹洗:吹洗设备遵从制造商建议.9. 不用设备:若一段时间不使用该设备,请把插头从插座上拔下.10. 杂物:确保机箱内没有液体或其它杂物.11. 修理:机器的修理必须由专业人员进行,除了操作手册上允许的维护外,不要擅自行动.修理工作要咨询专家.3.0 承诺及服务本公司承诺:从产品发货日起12 个月内,仪表在正常使用条件下出现的质量问题(不包括易耗品),公司免费维修.易耗品,玻璃电极,膜,液体结合处,电解液,O型圈等在正常使用条件下出现质量问题,公司免费维修90 天,日期从发货日算起.更换,维修的产品和部件以及剩余部分,此承诺同样有效,有效期90 天.当出现问题的产品,部件及消耗品可更新,修理或更换时,用户不应提出异议.非产品制造质量引起的直接或间接损失,本公司概不负责.服务条例1. 如果在保修期间产品出现问题,公司将免费进行维修.超过保修期,顾客需支付劳务和材料费用.2. 在保修期内,顾客退回产品进行维修而发现并无质量问题,顾客需支付最低的维修费用.3. 更换部件,原始部件及分析仪的模块号和序列号需提供.若原始部件不送回,C.A 公司将不会寄出更换的部件.仪表返修1. 要返修仪表,用户需得到一个返修号.2. 提供订单号或其它可接受的资料.3. 遇到的故障连同客户的姓名,地址,电话及返修号列成清单,一并寄回.4. 寄回仪表要用原始或同样的包装,否则包修自动失效.5. 每一个气体进出口用封头密封,否则包修自动失效.6. 在包装箱外面注明返修号.7. 使用C.A 公司同意的运输方式,空运时货物应直达,不接受中途转运.受其它条件的限制,也可申请海运.商标:本公司采用CONTROL ANALYTIK®商标.所有权顾客应认可Controle Analytique 公司对Controle Analytique 的软件,操作系统,硬件及其它商品的所有权.未经Controle Analytique 公司的书面允许不得对产品进行变换,更改,损坏,改造 ,复制等.4.0 技术指标检测器型号:…………………单光束,电磁感应,等离子池,非线性测量材料: 石英, 单元素. 内部压力不超过10PSIG(69Kpa)量程:…………………………X1:0-1ppm 分辨率10ppbX10:0-10ppmx 分辨率0.1ppmX100:0-100ppm 分辨率1ppm精确度:………………………≤1%FS漂移:…………………………±1%/天样品气流量要求:……………30~150cc/mm推荐的校验气:………………零点气:1.0~2.0ppm N2/Ar终点气:8.0~9.5ppm N2/Ar注意:校验取决于使用的量程。
凯奇焊机说明书
目录
(№1227/2010)
1.概述… … … … … … … … … … … … … … … … … … … … … … … … … … … … … 1 2.基本组成… … … … … … … … … … … … … … … … … … … … … … … … … … … 1 3.技术参数和规格… … … … … … … … … … … … … … … … … … … … … … … … … 2 4.主要结构… … … … … … … … … … … … … … … … … … … … … … … … … 3 5.焊机工作现场条件及环境要求… … … … … … … … … … … … … … … … … … … 5 6.电气工作原理简述… … … … … … … … … … … … … … … … … … … … … … … … 6 7.调 试 与 操 作 说 明 … … … … … … … … … … … … … … … … … … … … … … … 10 8.安装及安全使用… … … … … … … … … … … … … … … … … … … … … … … … 25 9.日常维护… … … … … … … … … … … … … … … … … … … … … … … … … … … 26 10.液压系统的维修与保养… … … … … … … … … … … … … … … … … … … … 26 11.简单故障的排除方法… … … … … … … … … … … … … … … … … … … … … … 27 12.输入/输出定义表……………………………………………………………… … … 28
4.1.1.3 内置双刃剪切机构、冲孔及废料输送装置 采用双刃剪同时剪切带头、带尾以保证两剪边的平行度。下剪刃可以升降以让开
AB伺服手册

安装说明Kinetix 3 组件伺服驱动器(目录号 TL-A110、-A120、-A130、-A220、-A230、-A2530、-A2540、A310 和 -A410)本出版物提供了 TL 系列电机的安装说明。
如果您负责安装这些 Allen-Bradley® 电机产品,请阅读本文档。
请在安装电机前阅读所有说明。
主题参见页码收货和存储 2环境防护等级 2工作温度和轴材料 3电机目录号标识 4准备安装电机 5电机安装和维护指南 5 延长电机寿命 6对电机轴进行机械连接7安装电缆8预防电噪声8使用轴密封件9安装 TL 系列电机9电机负载力额定值11连接器数据13安装尺寸15公制框架16NEMA 框架18拆卸和安装轴键20附件21相关文档232 TL 系列伺服电机安装说明收货和存储从货运公司收到货物时,客户负责检查设备。
对照订单检查收到的物品。
如有任何运输损坏或物品丢失,请立即通知承运商。
在满足以下环境条件的清洁干燥处存储电机:环境条件说明存储温度-10°至 85° C (14°至 185° F)相对湿度20% 至 85%,无凝露大气无腐蚀性环境防护等级根据防护标准 (IP 等级) 的相应环境保护等级,TL 系列电机、连接器和散头引线的符合性如下。
TL 系列电机等级说明1带可选轴密封件的电机2IP65防尘,防喷水不带轴密封并且按照以下方向安装的电机:轴朝下轴水平轴朝上IP53IP51IP50防尘,防溅水防尘,防垂直滴落的水滴防尘,无特殊防潮功能散头引线和连接器IP30防止直径大于 12.5 mm (0.5 in.) 的物体进入,无特殊防潮功能1 IP 等级说明仅供参考。
欲了解更完整的等级说明,请参见相关国际标准。
2 要达到 IP65 防护等级,需要使用可选的轴密封套件。
请参见第 21 页的附件。
TL 系列伺服电机安装说明3工作温度和轴材料条件或材料说明工作温度0°至 40° C (32°至 104° F)轴材料碳钢轴键材料碳钢4 TL 系列伺服电机安装说明电机目录号标识工厂指定选项AA = 标准AN = NEMA 安装法兰 / 轴抱闸2 = 无抱闸4 = 24VDC 抱闸连接器3 = 带连接器的散头引线,30cm外壳 / 轴键 / 轴密封J = IP65 外壳 / 轴键 / 无轴密封K = IP65 外壳 / 无轴键 / 无轴密封反馈B = 17位,带备用电池的多圈绝对编码器(无电池时为单圈)额定转速M = 4500 rpmP = 5000 rpm永磁叠片长度标识符法兰尺寸公制电机的安装螺栓圆周直径或 NEMA 尺寸1 = 46 mm 或 NEMA 17 3 = 100 mm2 = 70 mm 或 NEMA 234 = 115 mm25 = 90 mm 或 NEMA 34电压额定值A = 230 VAC系列标识符TL = 低惯量TL 系列伺服电机安装说明5准备安装电机1. 从货运箱中小心取出电机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.HA系列交流伺服简介HA系列数字式交流永磁同步电机伺服驱动器(以下简称伺服驱动器)采用了国际上先进的DSP 芯片(数字信号处理器)对电机的位置、转速、转矩进行数字化智能控制。
该伺服驱动器不仅可靠性高、性能优异,而且可以通过设定用户参数,对系统进行任意组态。
例如:可以组成位置控制系统、速度控制系统、转矩控制系统等。
1.1HA系列交流伺服的使用方法1.1.1 速度控制方式速度控制方式的伺服驱动器标准使用方法,如下图所示:如上图所示,在上位机侧组成位置控制环。
在上位机中,进行位置指令和位置反馈的比较操作,即进行位置环调节的计算,输出模拟速度指令给伺服驱动器。
伺服驱动器接收上位机的模拟速度指令,进行速度环控制。
在这种控制方式下,上位机的位置反馈可以是伺服驱动器输出的电机编码器信号,也可以是安装在机械上的直线位置测量信号(例如光栅尺、磁栅尺、感应同步器等),即可以组成位置全闭环系统。
1.1.2 位置控制方式位置控制方式的伺服驱动器标准使用方法,如下图所示:上位机进行完定位及插补计算后,将位置指令以脉冲串的形式传送给伺服驱动器,由伺服驱动器进行位置指令和位置反馈的比较操作,即进行位置环调节的计算。
这种形式的伺服驱动器包含了位置控制环。
作为位置指令的脉冲串,可以是下面的任一种,在伺服驱动器侧可以通过设定用户常数进行选择:1)符号位+脉冲列2)具有90°相位差的两相脉冲序列3)正转脉冲序列 + 反转脉冲序列1.2 HA系列交流伺服驱动器的内置功能HA系列伺服控制器的内置功能说明如下:1)控制方式转换通过数字操作器设定用户常数,可以使伺服驱动器工作于位置控制方式或速度控制方式。
为了防止误操作,在伺服电机运行时(伺服使能状态),不能改变控制方式。
2)再生能量处理功能伺服驱动器内置再生能量处理电路和再生制动电阻。
当伺服电机起制动频繁或负载惯量过大时,则必须使用外置再生制动电阻。
3)能耗制动功能在伺服驱动器断电、伺服驱动器故障时,电机处于不受控状态。
能耗制动功能可以使电机处于能耗制动状态,使电机马上停止,避免机械部件受损。
4)双电子齿轮功能为满足机械加工的需要,伺服驱动器内置有双电子齿轮功能,即通过外部触点信号来切换第一电子齿轮比和第二电子齿轮比。
5)位置信号输出功能伺服驱动器将光电编码器信号经长线驱动器输出,可以用作上位机的位置反馈信号。
6)内部速度指令功能伺服驱动器可以通过外部接点选择内部预置的四种速度。
1.3 HA系列交流伺服的规格和特性1.3.1 规格1.3.2启动时间和停止时间在一定的负载状态下,电机的起动时间tr和停止时间tf可用下式计算(忽略了电机的粘性转矩和摩擦转矩:2π·Nr ·(Jm + JL)起动时间:tr =60·(Tpm – TL)2π·Nr ·(Jm + JL)制动时间:tf =60·(Tpm-TL)上式中:Nr:电机的速度;Jm:电机的转子惯量(kg㎡);JL:负载轴惯量(kg㎡);Tpm:与伺服驱动器组合时,电机的最大转矩(Nm);TL:负载转矩(Nm)。
1.3.3 负载惯量负载惯量说明了负载的特性。
负载惯量越大,伺服系统的响应性越差。
使用伺服电机时,许可使用的最大负载惯量,应该小于电机惯量的五倍。
在超过电机惯量五倍的负载惯量下使用时,减速时可能出现过电压报警。
请进行以下的改进:1)将转矩限制值变小;2)将减速曲线变缓;3)降低电机的最高旋转速度;4)改用大型号电机或与本公司技术部门接洽。
1.3.4 负负载以负载的力使电机连续运转的负载称为负负载。
在负负载时,伺服驱动器处于连续的再生制动状态。
由负载产生的再生能量超过容许范围时,有可能损坏伺服驱动器。
2. 安装2.1外形尺寸单位:mm2.2 环境要求将伺服驱动器安装在满足下列条件环境中:1)环境温度单元的环境温度 0—55℃电气柜的环境温度 0—45℃2)湿度一般湿度低于或等于95%RH,无冷凝3)振动运行过程中低于0.5G 4)空气无具有腐蚀性或导电的尘埃直接沉积到电路上。
2.3 伺服单元的安装1)安装方法(1)安装方式用户可采用底板安装方式或面板安装方式安装,安装方向垂直于安装面。
图2.1底板安装示意图图2.2 面板安装示意图(2)安装间隔图2.3示单台驱动器安装间隔,图2.4示出多台驱动器安装间隔,实际安装中应尽可能留出较大间隔,保证良好的散热条件。
图2.3 单台驱动器安装间隔图2.4 多台驱动器安装间隔注意:为保证驱动器周围温度不致持续升高,电柜内应有对流风吹向驱动器的散热器。
3.连接3.1 接口信号标准在交流伺服单元和电气柜之间传输信号时,须遵循以下输入输出信号规则。
3.1.1 开关量输入信号(Type1)图3.2 Type1 开关量输入接口此信号是从外界输入到交流伺服单元的a) 由用户提供外部直流电源,DC12~24V ,电流≥100mA ;b) 外部触点容量要求:大于30V ,大于16mA 。
c) 下图表示的是交流伺服驱动器对输入信号的响应与触点输入信号之间的 滞后时间:断开 断开 触点输入信号5-20ms 5-20ms从上图可以看出,当触点输入信号开关的时候,交流伺服驱动器对接收的信号响应要滞后5到20毫秒,因此,要使输入信号有效,外部触点必须持续导通或 关闭20毫秒以上。
3.1.2 开关量输出接口(Type2)图3.2 Type2 开关量输出接口这是从交流伺服驱动器到外部的输出。
a) 此信号是由交流伺服驱动器中的一个集电极开路的光电耦合器向外输出的,输出规格如下:1) 额定电压:小于30VDC;2) 输出电流:小于40mADC;3) 饱和电压:小于等于1.5V(Ic=40mA)。
开关量输出信号的负载必须满足这个限定要求。
如果超过限定要求或输出直接与电源连接,会使伺服驱动器损坏;b) 外部电源由用户提供,但是必需注意,如果电源的极性接反,会使伺服驱动器损坏;c) 如果负载是继电器等电感性负载,必须在负载两端反并联续流二极管。
如果续流二极管接反,会使伺服驱动器损坏。
3.1.3 位置指令脉冲输入接口(Type3)此信号是由上位机输入到伺服驱动器的。
伺服驱动器内部采用高速光电耦合器接收,输入电流为 7~15mA。
不同的上位机信号源有不同的接线方法,详见5.2.2位置指令。
3.1.4 模拟量输入接口模拟量输入接口接收上位机输出的模拟速度指令。
模拟量输入接口是差分接收方式,输入阻抗为10kΩ,输入范围为–10v ~ +10v。
3.2 接口信号说明控制方式简称:P代表位置控制方式 S代表速度控制方式表1.2 编码器信号输入端子CN2焊接动力插座电机侧,U—2;V—3;W—4;壳-13.3 连接和配线3.3.1 主电路的配线主回路配线图:主回路端子功能及概要:配线时注意事项:●接地:接地线应尽可能粗一点,驱动器与伺服电机在PE端子一点接地,接地电阻<100Ω。
●建议由三相隔离变压器供电,减少电击伤人可能性。
●建议电源经噪声滤波器供电,提高抗干扰能力。
●请安装非熔断型(NFB)断路器使驱动器故障时能及时切断外部电源。
●电源线和信号线通过统一管道配线时,请不要捆绑在一起。
电源线和信号线请离开30cm以上的距离进行配线。
●切断电源后,在短时间内,伺服驱动器内还存有高电压,请不要接触电源端子●请不要频繁地开断电源伺服驱动器的电源部分有电容器,电源接通时,有很大的充电电流流过(充电时间1秒左右),因此,频繁地开断电源将致使伺服驱动器内部的元件老化,引发意外故障。
3.3.2 控制信号连接器CN1的连接方法3.3.2.1 控制信号连接器CN1 的端子信号图3.3.2.2 位置环控制时CN1的连接方法3.3.2.3 速度环控制时CN1的连接方法注意:●线径:采用屏蔽电缆(最好选用绞合屏蔽电缆),线径≥0.12mm2(AWG24-26),屏蔽层须接FG端子;●线长:电缆长度尽可能短,控制CN1电缆不超过3米;●布线:远离动力线路布线,防止干扰串入。
●请给相关线路中的感性元件(线圈)安装浪涌吸收元件:直流线圈反向并联续流二极管,交流线圈并联阻容吸收回路。
3.3.3 电机反馈线的连接3.3.3.1 电机反馈线连接器CN2的端子信号图3.3.3.2 电机反馈线CN2的连接方法●采用屏蔽电缆(最好选用双绞屏蔽电缆),线径≥0.12mm2,屏蔽层须接FG端子;编码器的电源线的线径应大于0.3mm2,如线径不能满足要求,可以采用多股细线并联的方法;●反馈电缆长度尽可能短,长度不要超过20米;●远离动力线路布线,防止干扰串入。
4. 试运行4.1 运行时序4.1.1 上电时序电源连接请参照3.3.1主电路的配线,并按以下顺序接通电源:1)接通空气开关,控制电源 r,t 接通,伺服系统控制电路开始工作;此时如果没有故障,伺服系统输出ALM 信号ON;如果出现故障,在显示器上显示报警号, 伺服系统输出ALM 信号OFF, 此时,伺服系统只接收报警复位信号 ALRS.2) 接通位置环准备好信号PRDY (即输入信号1 UI1) , 伺服系统接收到UI1信号后,接通内部的充电继电器,三相交流电源通过伺服系统内部的充电电阻为储能电容充电,1秒后伺服系统内部的主继电器吸合,能耗制动继电器打开,完成主电路上电过程,伺服准备好信号 SRDY 输出为ON.3)伺服准备好信号(SRDY)输出为ON后,此时可以接收伺服使能(SON)信号.此时,如果伺服使能SON为ON,则电机被激励,系统处于运行状态。
如果伺服使能信号断开或有系统报警,则基极电路关闭,电机处于自由状态。
a)当伺服使能SON与位置环准备好信号PRDY (即输入信号1 UI1)一起接通时,基极电路大约在1.5秒后接通。
b)频繁接通或断开位置环准备好信号PRDY (即输入信号1 UI1),可能损坏软启动电路和能耗制动电路,接通断开的频率最好限制在每小时5次,每天30次以下。
如果因为驱动器或电机过热,在将故障原因排除后,仍要经过30分钟冷却,才能再次接通电源。
4) 电源接通时序控制电源接通伺服报警输出(ALM)位置环准备好信号PRDY(即输入信号伺服准备好信号(SRDY)伺服使能SON伺服电机激励4.1.2 报警及复位时序控制电源接通伺服报警输出(ALM)外部主接触器及内部能耗制动继电器伺服准备好信号(SRDY)PRDY 及 SON伺服电机激励报警复位4.2伺服电机空载试运行为了避免意外事故,首先对无负载状态的伺服电机进行试运行;在电机轴上有负载连接时,请不要转动电机。
确认配线及连接是否正确在伺服驱动器的试运行中,伺服电机不能转动的原因几乎都是配线错误,因此,在通电前应该仔细检查:●电源线路连接是否正常●伺服电机的配线是否正常●输入输出的配线(CN1)是否正常●上位机的调整使用带制动器电机的用户,请参阅“带制动的伺服电机的使用”。