车辆大作业2
2023年秋国开汽车维护与保养形考作业2

2023年秋季国家开放大学《汽车维护与保养》形成性考核作业参考答案第二次形考试题1.洗车的主要目的是使漆面清洁亮丽,光彩如新。
()判断题(3分)A.对B.错正确答案: B2.洗车一般用含快物质较多的硬水。
()判断题(3分)A.对B.错正确答案: B3.自然氧化严重或透镜效应严重引起的失光处理可采取抛光研磨方法。
()判断题(3分)A.对B.错正确答案: B4.抛光的作用是清除研磨留下细微划痕。
()判断题(3分)A.对B.错正确答案: B5.烈日或高温下清洗车辆,有利于车身表面清洗。
()判断题(3分)A.对B.错正确答案: B6.车身美容所包括汽车清洗。
()判断题(3分)A.对B.错正确答案: B7.固定式清洗设备具有清洗效率高、劳动强度大等特点。
)判断题(3分)A.对B.错正确答案: B8.特种清洗只需要除锈剂。
()判断题(3分)A.对B.错正确答案: B9.打蜡作业环境清洁,有良好通风。
()判断题(3分)A.对B.错正确答案: A10.喷漆前的一切准备工作都要在喷漆间外进行。
()判断题(3分)A.对B.错正确答案: A11.汽车美容新概念,达到。
“旧车变新,新车保值,延寿增益”的功效。
()判断题(3分)A.对B.错正确答案: A12.漆面处理服务项目可分为氧化膜、飞漆、酸雨处理,漆面深浅划痕处理,漆面部分板面破损处理。
()判断题(3 分)A.对B.错正确答案: B13.车室美容在除尘、清洁的同时,施以特殊的工艺,进行必要的上光保护、翻新修补、杀菌及空气净化。
()判断题(3分)A.对B.错正确答案: A14.去除沥青、焦油是采用专门的焦油和沥青去除剂,在去除污迹的同时,最大限度地保护漆面。
也可以采用抛光研磨方法去除。
()判断题(3分)A.对B.错正确答案: A15.专业的“美容洗车”作业场所固定,配套设备完善齐全;采用循环水再生利用技术,节约能源。
()判断题(3分)A.对B.错正确答案: A16.汽车面层受到()等侵蚀,漆面会出现斑点。
国开电大《城市轨道交通安全管理》形考作业二答案
国开电大《城市轨道交通安全管理》形考作业二答案1.行车安全是城市轨道交通运营安全的()部分。
单选题 (2 分) 2分A.核心B.重要C.主要D.次要正确答案: A2.客车中破一辆属于()。
单选题 (2 分) 2分A.重大事故B.大事故C.险性事故D.一般事故正确答案: A3.人员死亡1人或重伤2人及其以上者属于()。
单选题 (2 分) 2分A.重大事故B.大事故C.险性事故D.一般事故正确答案: B4.下列属于一般事故的是()。
单选题 (2 分) 2分A.客车中破一辆B.列车冲突C.客车夹人开车D.挤岔正确答案: D5.发生险性事故,由()立即组织有关人员进行调查。
单选题 (2 分) 2分A.车站值班站长B.安全监察室负责人C.司机D.调查组负责人正确答案: B6.()是城市轨道交通运输工作实行集中领导、统一指挥的具体体现和保证之一。
单选题 (2 分) 2分A.调度命令B.行车信号C.电话D.值班站长命令正确答案: A7.()是整个城市轨道交通行车安全工作的关键环节之一,是把好行车安全的最后一道关口。
单选题 (2 分) 2分A.行车调度安全B.车站作业安全C.列车驾驶安全D.调车作业安全正确答案: C8.列车司机必须持证上岗,脱离驾驶岗位()以上,如需再驾驶列车必须对业务知识和安全运行知识等进行再培训,并且考核合格,对其纪律性和身体状况,心理状况由相关管理部门及有关领导做出鉴定。
单选题 (2 分) 2分A.5个月B.7个月C.4个月D.6个月正确答案: D9.严格遵守交接班制度;关门前必须确认行车凭证、道岔、进路正确;动车前确认所有人员均在安全区域。
是()。
单选题 (2 分) 2分A.折返作业安全准则B.整备作业安全准则C.调车作业安全准则D.人身安全准则正确答案: A10.升弓前,必须确认所有人员均在安全区域,指的是()。
单选题 (2 分) 2分A.折返作业安全准则B.整备作业安全准则C.调车作业安全准则D.人身安全准则正确答案: D11.城市轨道交通企业施工项目施工负责人和责任人,两者须经过培训后取得()资格证书,并实行持证上岗制度。
(完整版)列车运行控制作业2
作业2(四、五、六章)一、填空:1.列车自动控制系统(ATC)包含三个子系统:(列车自动防护)、(列车自动驾驶)(列车自动监控)。
2.城市轨道交通行车自动化的功能包括低级阶段功能和高级阶段功能。
低级阶段的基本功能是由(自动闭塞、自动停车、车站联锁和高度集中控制)来完成的;高级阶段的基本功能则叠加了(行车指挥自动化和列车运行自动化中的ATO系统以及若干自动检测设备)。
3.ATC系统应包括下列控制等级:(控制中心自动控制模式);(控制中心自动控制时的人工介入控制或利用CTC系统的人工控制模式);(车站自动控制模式);(车站人工控制模式)。
4.ATO子系统主要用于实现“地对车控制”,即用地面信息实现对(列车驱动)、(制动的控制),包括(列车自动折返),根据控制中心指令自动完成对列车的(启动)、(牵引)、(惰行)和(制动),送出车门和站台安全门开关信号,使列车以最佳工况安全、正点、平稳地运行。
5.当列车处在自动驾驶模式下,车载ATO运用(牵引)和(制动)控制,实现列车自动运行。
6.ATO为(非故障)(填是否故障——安全)系统,其控制列车自动运行,主要目的是(模拟最佳司机的驾驶实现正常情况下高质量的自动驾驶)。
7.ATO具有一个(双向)(填写“单向”或“双向”)通信系统,通过车载ATO 天线和地面ATO环线允许列车直接与车站内的ATS连接,可以实现最佳的运营控制,完成下列ATO功能:(程序停车)、(运行图和时刻表调整)、(轨旁/列车数据交换)、(目的地和进路控制功能)。
8.ATO模式即(ATO自动运行模式),此模式是正线上列车运行的正常模式,即用于正线上列车的正常运行。
在这种模式下,列车在车站之间的运行是自动的,不需司机驾驶,司机只负责(监视ATO显示),监督车站(发车和车门关闭),以及列车运行所要通过的(轨道、道岔和信号)的状态,并在必要时人工介入。
9.SM模式即(ATP监督人工驾驶模式),是一种受保护的人工驾驶模式。
《车辆工程导论》课程大作业.docx
..《车辆工程导论》课程大作业1.分别阐述车辆对客观世界和社会的影响以及车辆在社会发展中的作用。
(1)车辆对客观世界和社会的影响1.车辆的出现对客观世界和社会好的方面的影响:车辆的出现和快速发展便利了人们的出行,是人民能够很快的从一个地区到达另一个地区。
单纯从人们的生活角度来说它可以帮助人们的旅行、出游,有利于扩宽人们的视野。
使在古代游子们离家千里思乡的情怀一去不复返。
车辆的发展使交通运输业大力发展,从而促进了各地区的经济交流。
从单纯的车辆特别是汽车产业来说,汽车工业在发达国家的经济发展中,起着重要支柱的作用。
在产值和销售收入中,汽车工业占较大比重。
汽车工业的发展必然会推动许多相关工业部门的发展。
汽车工业是综合性的组装工业,一辆汽车由千万种零、部件组成,每一个汽车主机厂都有大量的相关配件厂,所以汽车工业和许多工业部门具有密切的联系。
汽车工业是高度技术密集型的工业,集中着许多科学领域里的新材料、新设备、新工艺和新技术。
同时大量的就业岗位解决了许多人的就业问题。
车辆夜对各地区间的经济交流起着至关重要的作用,没有交通业就没有今日经济的蓬勃发展,交通业的发展也对世界经济一体化起着致关重要的作用。
在交通业的发展中给了不发达地区更多的发展机会,从而帮助更多的人脱离贫困。
从文化角度来说,车辆导致的交通业的发展促进了各地区的文化交流,促进了文化融合,形成了现在世界各地文化产业百花齐放的场景,有益于从文化交流中创造出新的创造出新的内容。
并且在文化交流的过程中各地区的人加强了解,有益于维护和平。
它可以使不同意识形态的社会加强交流,互相了解,从而促进整个世界的社会形态的进步。
同时它可以使加强各地的科技交流,从而加快科技的进步。
2.车辆的出现对客观世界和社会不好的方面的影响:车辆的出现加快了世界上化石燃料的使用,导致了能源的快速消耗,使环境受到污染,尤其是车辆所排放的尾气不仅会污染大气,还会造成酸雨影响动植物的生存与建筑,使罹患癌症的人数越来越多。
铁路行车组织 02
任务一 技术站的货物列 车技术作业
一、技术站货物列车作业种类
1.技术站办理的货物列车种类
自编始发列车:在该技术站编成并出发的列车。 无调中转列车:在技术站不进行任何改编作业,而只在到发场 进行到发技术作业后,继续运行的列车。 部分改编中转列车:在技术站进行变更重量、换挂车组或变更 运行方向等调车作业后继续运行的列车。 到达解体列车:在该技术站全部车列需要解体的列车。
6.更换机车或机车乘务组换班
列车到达技术站后,一般要进行机车更换作业,如果采用 循环运转制,在基本段不更换机车时,则需进行机车乘务组换 班作业。到达机车由检车人员负责摘下,车站值班员应及时安 排到达机车入段进行整备作业。出发机车应按规定时间提前出 段,在机待线工作人员及时连挂车列并按规定进行试风, 准备发车。
部分改编中转列车除需办理与无调中转列车相同的各项作 业外,在站的技术作业内容还增加了调车作业环节。具体组织 方法如下。
(1)减轴时,对摘下车组可采用先摘下后检修的方法。在 调车机车甩车的同时,检车员集中力量检修基本车组。 (2)补轴时,对补轴车组可采用先检修后挂车的方法。事 先检修好的补轴车组由调车机车挂好在邻线等候,在车列检 修完成后立即挂上。在列车前部补轴或减轴时,如能利用到 达机车减轴、出发机车补轴,还能进一步缩短甩挂车组的作 业时间。
四、列车编组顺序表
1.列车编组顺序表的作用
列车编组顺序表(运统1)是记载列车组成情况,车 站与车长(或司机)间、铁路局间交换车辆的依据,也 是编制车站作业计划、进行运输统计工作的原始资料。 因此,凡由编组站、区段站及列车始发站发出的列车 (包括挂有车辆的单机、轨道车附挂路用车),均应由 车号人员根据《铁路货车统计规则》的有关规定,按照 列车实际组成情况,正确、及时地编制列车编组顺序表。
国家开放大学 城市轨道交通行车组织 第二次作业参考答案
1.()的作用是直接承受车轮传递的列车及其荷载的重量,并引导列车的运行方向,以及为供电、信号系统电路提供回路。
单选题(2 分) 2分A.【A.】钢轨B.【B.】轨枕C.【C.】道床D.【D.】防爬设备正确答案: A答案解释:2.()是线路连接设备的一种,用来使列车/车辆从一股道转入另一股道。
单选题(2 分) 2分A.【A.】钢轨B.【B.】转辙机C.【C.】道床D.【D.】道岔正确答案: D答案解释:3.()与曲线、接头并称为轨道的三大薄弱环节。
单选题(2 分) 2分A.【A.】钢轨B.【B.】道岔C.【C.】道床D.【D.】轨枕正确答案: B答案解释:4.()监视列车运行速度不超过限制速度,一旦超过,就会触发紧急制动。
单选题(2 分) 2分A.【A.】列车自动防护子系统B.【B.】列车自动驾驶子系统C.【C.】列车自动监控子系统D.【D.】计算机联锁子系统正确答案: A答案解释:5.在()下,列车自动防护子系统将不起任何作用,列车运行的安全完全由调度员、车站值班员和司机人为保证。
单选题(2 分) 2分A.【A.】列车自动驾驶模式B.【B.】限速下的人工驾驶模式C.【C.】非限制人工驾驶模式D.【D.】列车自动防护子系统监督下的人工驾驶模式正确答案: C答案解释:6.在城市轨道交通中,()一般多用于车辆段线路的道岔段。
单选题(2 分) 2分A.【A.】钢筋混凝土轨枕B.【B.】木枕C.【C.】复合材料轨枕D.【D.】高强度塑胶轨枕正确答案: B答案解释:7.作为(),转辙机应能实时反映道岔的定位和反位状态。
单选题(2 分) 2分A.【A.】转换器B.【B.】锁闭器C.【C.】监督表示器D.【D.】定位器正确答案: C答案解释:8.在实际列车运行图中,调试列车的表示方法为()。
单选题(2 分) 2分A.【A.】红虚线B.【B.】红实线+方向箭头C.【C.】红实线+短竖红实线D.【D.】红实线+红圈正确答案: C答案解释:9.列车运行周期是指列车在运营线路上()(不包括回库、检修等时间)。
机械设计大作业二设计螺旋起重器(千斤顶)

机械设计大作业二-设计螺旋起重器(千斤顶)机械设计大作业报告二:设计螺旋起重器(千斤顶)一、设计题目:螺旋起重器(千斤顶)的设计二、设计背景与目的在工程领域,起重器是必不可少的设备之一,用于进行物体的提升、降落和搬运。
螺旋起重器作为一种常见的起重器,具有结构简单、操作方便、稳定性好等优点。
本次设计的目的是设计一款结构合理、性能稳定的螺旋起重器(千斤顶),以满足实际工程应用的需求。
三、设计要求与参数1.设计要求(1)最大起重量:1000kg(2)最大起重高度:100mm(3)螺旋直径:16mm(4)螺旋长度:根据实际需要确定(5)设备应具有足够的强度和稳定性,能够承受较大的载荷和冲击。
2.设计参数(1)材料选择:优质碳素结构钢(如Q235)(2)驱动方式:手动操作(3)传动方式:螺旋传动(4)结构形式:采用紧凑型设计,便于携带和使用。
四、设计步骤与方案1.确定总体方案根据设计要求和参数,确定螺旋起重器的总体方案。
主要包括传动方式、结构形式、操作方式等。
考虑到手动操作的特点,设计时应注重设备的便携性和易用性。
2.结构设计根据总体方案,进行结构设计。
主要包括螺旋部分的长度、直径和材质选择,以及支撑部分的材料和结构形式等。
在设计过程中,应考虑到设备的强度、刚度和稳定性要求。
3.传动系统设计根据总体方案和结构设计,进行传动系统的设计。
主要包括传动轴的直径、长度和材质选择,以及齿轮或蜗轮蜗杆等传动元件的选择和设计。
在设计过程中,应考虑到传动效率、平稳性和使用寿命等因素。
4.操作系统设计根据总体方案和结构设计,进行操作系统的设计。
主要包括操作手柄的形状、长度和材质选择,以及操作机构的运动方式和结构设计等。
在设计过程中,应考虑到操作简便、省力和安全等因素。
5.校核与分析对所设计的螺旋起重器进行校核与分析,主要包括强度校核、刚度校核和稳定性分析等。
确保设备能够满足实际工程应用的要求,具有较高的安全性和可靠性。
6.图纸绘制与说明根据所设计的螺旋起重器,绘制相关图纸,包括总装图、部件图和零件图等。
国开电大2024年春季《城市轨道交通客运组织》形考作业二答案
国开电大2024年春季《城市轨道交通客运组织》形考作业二答案1.()是对运输计划期间轨道交通线路客流的规划,它是全日行车计划、车辆配备计划和列车交路计划编制的基础。
单选题 (2 分) 2分A.客流计划B.客运C.客运技术D.计划正确答案: A2.客流计划以()资料作为编制基础,分步计算出各站上下车人数和断面客流量数据。
单选题 (2 分) 2分A.站间小时客流量B.站间全天客流量C.站间到发客流量D.站间高峰客流量正确答案: C3.车辆定员的多少取决于车辆的尺寸、车厢内座位布置方式和()。
单选题 (2 分) 2分A.车门设置数B.列车编组辆数C.满载率D.舒适度正确答案: A4.列车编组辆数是以()作为基本依据。
单选题 (2 分) 2分A.客流量B.最大断面的客流量C.每小时最大断面的客流量D.高峰小时最大断面的客流量正确答案: D5.列车定员数是()和车辆定员数的乘积。
单选题 (2 分) 2分A.列车编组辆数B.车门设置数C.车辆的尺寸D.行车密度正确答案: A6.车辆配备计划是为完成全日行车计划而制订的()安排计划。
单选题 (2 分) 2分A.运营车辆数B.在修车辆数C.车辆保有数D.备用车辆数正确答案: C7.()的组织方案,既能满足运输需求,又能提高运营效益。
单选题 (2 分) 2分A.长交路B.长短交路混行C.短交路D.折返交路正确答案: B8.从行车组织的角度看,()列车运行在各区段客流量不均衡情况下,会产生部分区段运能的浪费。
单选题 (2 分) 2分A.长交路B.短交路C.长短交路D.混合交路正确答案: A9.列车运行到终点站或在短交路和长短交路情况下运行到中间折返站需要进行()。
单选题 (2 分) 2分A.检修作业B.进站作业C.折返作业D.出站作业正确答案: C10.在采用()时,列车空车走行少,折返时间较短;乘客能同时上下车,可以缩短停站时间。
单选题 (2 分) 2分A.站后折返方式B.站前折返方式C.直线折返方式D.曲线折返方式正确答案: B11.自动扶梯一般在扶梯的()设有“紧急停止按钮”。
汽车理论大作业(2)
汽车理论大作业20100410420车辆四班杨江林1.内容本文在MATLAB/Simulink中搭建ABS莫型,将ABS寸整车的性能影响进行仿真,并对仿真结果进行分析来证明方法的可行性。
2原理由轮胎纵向力特性可知,车轮的滑移率 b s决定了制动力和侧向力的大小。
公式1给出了车轮滑移率b s的定义。
式中,丿宀为车速,对应线速度,V V为汽车线速度,r R为车轮半径,为车轮线速度。
如图1所示为车辆在制动行使时,地面作用于车轮的制动力sb F和侧向力yF随车轮制动滑移率b s的变化关系。
可以看出,侧向力随滑移率bs的增加而下降,当滑移率从1降为0时,制动力开始随滑移率的增加而迅速增加;当滑移率增至某值opt s时,制动力则随滑移率的增加而迅速减少。
公式1说明了车速与轮速的关系:当滑移率为1时,车速与轮速相等;当滑移率为0时,车轮已经处于抱死状态。
车轮抱死滑移时,不仅制动力减少,制动强度降低,而且车轮侧向附着力也大大减少。
因此,当前轮抱死滑移时,车辆丧失转向能力;而后轮抱死滑移则属于不稳定工况,易引起车辆急速甩尾的危险。
根据制动时附着系数与滑移率的关系曲线可知,当把车轮滑移率的值控制在最佳滑移率20%附近时,汽车将能够获得最好的制动效能同时还拥有较好的方向稳定性。
附着系数的数值主要取决于道路的材料、路面的状况、轮胎的结构、胎面花纹、材料以及车速等因素。
因此对于不同的路面来说,附着系数与滑移率的关系是不同的。
图2是不同路面的附着系数与滑移率的关系。
0 20 40 60 80 100^滑移率'图2不同路面的附着系数与滑移率的关系利用车轮滑移率的门限值及参考滑移率设计控制逻辑,使得车轮的滑移率保持在峰值附着系数附近,从而获得最大的地面制动力和最小的制动距离。
制动时的侧向稳定性。
3. 模型由于汽车动力学模型建立是个复杂的过程,采用单轮模型建立汽车动力学模型。
简化的单轮模型如图3。
同时获得较大的侧向力,保证由图可得到车辆的动力方程:车辆运动方程:dv m— dt车轮运动方程:dI FR T b dt车辆纵向摩擦力:F N(1)(2)式中, m为1/4整车质量(kg);F为地面制动力(N);R为车轮半径(m); I为车轮转动惯量(kg?m2);Tb为制动力矩(N?m), m); v 为车身速度(m/s); w 为车轮角速度(rad • s ); N 为地面对车轮的法向反作用力( N );卩为地面摩擦系数。
《城市轨道交通车辆维护与检修》习题及答案
《城市轨道交通车辆维护与检修》习题及答案《城市轨道交通车辆维护与检修》作业一一、填空题1.车辆维护的工作内容是保持车辆清洁整齐、润滑良好、安全运行,包括及时()松动的紧固件、()活动部分的间隙等,简言之,即清洁、润滑、紧固、调整、防腐。
2.定期维修又称时间预防维修,它以()或()作为维修期限。
3.车辆维修限度的种类包括原形尺寸、禁止使用限度(运用限度)和()。
4.()是指各级修程所规定的维修限度,也是区分各零部件的损伤在各级修程中是否需要处理的依据。
5.待修车辆回至车辆段、车辆基地直至修竣后的全部过程,称为车辆的()。
6.车辆零部件一般是受多次交变载荷作用而产生裂纹的,这种形式的损坏称为()。
7.零部件的()将直接影响城市轨道交通车辆的修理质量。
8.金属零部件的()是指表面与周围介质起化学或电化学作用而发生的表面破坏现象。
二、选择题1.()是指根据车辆零部件的磨损情况,事先只规定检查次数和时间,而每次修理的具体期限、类别和内容均由检查后的结果决定的修理方法。
A.检查后修理法B.现车修理法C.定期修理法D.标准修理法2.车辆在各级修程中,()主要是对与列车行车安全相关的零部件进行外观检查和车辆各类功能检查。
A.双周检B.日检C.年检D.架修3.()也称故障后维修,它不控制维修时期,是在某个机件出现故障之后所采取的维修方式。
A.状态修B.定期维修C.事后维修D.视情维修4.对已运营稳定的线路,考虑到人力成本和设备类型,最佳的维修方式为(),其自动化程度高、维修成本低、设备性能保持好。
A.计划修B.状态修C.大修D.架修5.在车辆修理过程中,按规定的次序依次完成的各种作业总和称为车辆的修理()。
A.工序B.工步C.生产过程D.工艺过程6.城市轨道交通车辆机械零部件检修与更换主要是由()引起的。
A.变形B.腐蚀C.磨损D.断裂7.引起绝缘材料老化的主要原因是()。
A.环境湿度B.材料受热和材料氧化C.材料受力D.光照三、判断题1.通过日常检查可全面准确地掌握零部件磨损的实际情况,以便确定零部件是否有必要修理。
16秋北交《车辆工程》在线作业2
北交《车辆工程》在线作业2一、单选题(共10 道试题,共30 分。
)1. 下列尺寸无法用第四种检查器检查的是()。
A. 轮缘厚度B. 车轮直径C. 轮辋厚度D. 踏面剥离长度正确答案:2. 出现下列情况时,不需要更换车轴的是()。
A. 车轴弯曲B. 轴身有1处超限不能修复C. 轴端无组成钢印D. 轴颈、防尘板座有电焊打火正确答案:3. 空气弹簧大体可以分为囊式、膜式和()三类A. 管式B. 壳式C. 自由式D. 阀式正确答案:4. 以下哪个选项不是高速接触网的主要结构参数?()A. 结构高度B. 接触网高度C. 锚段长度D. 接触网线材正确答案:5. DT200型转向架是()生产的高速动车组的客车转向架。
A. 日本B. 德国C. 法国D. 中国正确答案:6. 磁悬浮列车采用()驱动?A. 电力B. 电磁C. 电传动D. 液力传动正确答案:7. 高速铁路线路所用的钢轨类型为()。
A. 50千克/米B. 60千克/米C. 70千克/米D. 80千克/米正确答案:8. 下列不属于货车性能标记的是()。
A. 自重B. 载重C. 容积D. 全长正确答案:9. 车轴受力最大的部位是()A. 轴颈B. 轮座C. 轴身防尘板座正确答案:10. 世界上第一条高速铁路是()。
A. TGV东南线B. TGV大西洋线C. 东海道新干线D. 北海道新干线正确答案:北交《车辆工程》在线作业2二、多选题(共10 道试题,共40 分。
)1. 车辆上采用的弹簧种类很多,按其材质可分为( )三类。
A. 钢质弹簧B. 橡胶弹簧C. 空气弹簧D. 木弹簧正确答案:2. 圆弹簧的主要故障形式有( )。
A. 裂纹B. 折损D. 腐蚀及磨耗正确答案:3. 滚动轴承一般由( )组成。
A. 内圈B. 外圈C. 滚子D. 保持架正确答案:4. 目前我国铁道车辆上使用的车轮为( ),简称整体轮。
A. 锻压钢轮B. 外购车轮C. 整体辗钢轮D. 新型铸钢轮正确答案:5. 车辆零件的损伤主要有( )等几种。
《铁路调车作业》第2部分:准备作业
1 范围 本部分规定了铁路调车准备作业的程序、项目、内容、作业人员、技术要求等。 本部分适用于国家铁路、合资铁路、地方铁路、专用铁路的调车准备作业。
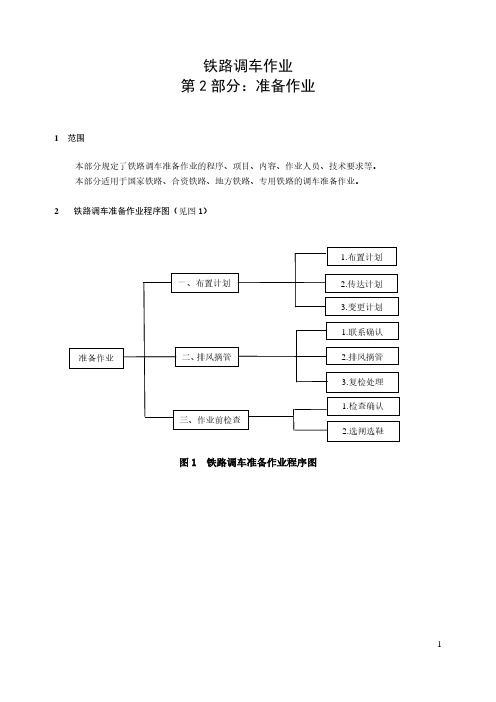
2 铁路调车准备作业程序图(见图 1)
准备作业
一、布置计划 二、排风摘管 三、作业前检查
1.布置计划 2.传达计划 3.变更计划 1.联系确认 2.排风摘管 3.复检处理 1.检查确认 2.选闸选鞋
事项
①应正确及时地编制、布置调车作业
计划。布置调车作业计划,应使用
调车作业通知单(企业另有特殊规 定时除外)。普速铁路中间站利用本
务机车调车以及高速铁路车站进行 有车辆摘挂的调车作业时,应使用
有示意图的调车作业通知单(示意
图可另附)。
②调车作作业不超过三钩可用口头方式 备原因,
布置(中间站利用本务机车调车及 亲 自 交
高速铁路车站调车除外),有关人员 接 计 划
必须复诵。④调车领导人与调车指 确 有 困
挥人必须亲自交接(连续作业时可 难 以 及
由连结员接取)计划,并布置作业 设 有 调
要求和注意事项。由列车调度员担 车 作 业
当调车领导人时,可指派胜任人员 通 知 单
代为转达,调车指挥人接到调车作 传 输 装
②列车到达后,确认列检到达试风完 毕,方可开始排风。
③排风摘管,应做好防护。
①缓缓打开折角塞门,放出制动主管 的风。排放制动缸余风,做到风排 净、不漏排、不抱闸,排风作业在列 车解体前完成。
无列检 作业的 列车除 外。
3
作业程序
表 1(续) 岗位作业
说明
程 序 项 目 内 容 作业人员
技术要求
事项
制动员 检查有 困难时, 由《站 细》规定 检查办 法。
汽车理论大作业
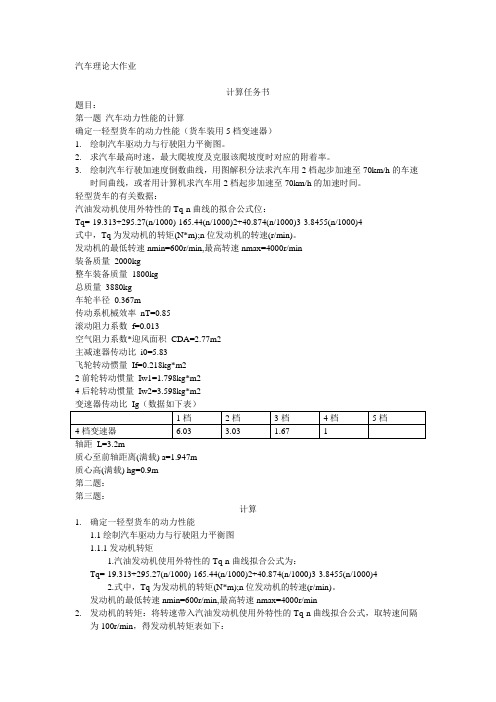
汽车理论大作业计算任务书题目:第一题汽车动力性能的计算确定一轻型货车的动力性能(货车装用5档变速器)1.绘制汽车驱动力与行驶阻力平衡图。
2.求汽车最高时速,最大爬坡度及克服该爬坡度时对应的附着率。
3.绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速至70km/h的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式位:Tq=-19.313+295.27(n/1000)-165.44(n/1000)2+40.874(n/1000)3-3.8455(n/1000)4式中,Tq为发动机的转矩(N*m);n位发动机的转速(r/min)。
发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min装备质量2000kg整车装备质量1800kg总质量3880kg车轮半径0.367m传动系机械效率nT=0.85滚动阻力系数f=0.013空气阻力系数*迎风面积CDA=2.77m2主减速器传动比i0=5.83飞轮转动惯量If=0.218kg*m22前轮转动惯量Iw1=1.798kg*m24后轮转动惯量Iw2=3.598kg*m2变速器传动比Ig(数据如下表)1档2档3档4档5档4档变速器 6.03 3.03 1.67 1 ----轴距L=3.2m质心至前轴距离(满载) a=1.947m质心高(满载) hg=0.9m第二题:第三题:计算1.确定一轻型货车的动力性能1.1绘制汽车驱动力与行驶阻力平衡图1.1.1发动机转矩1.汽油发动机使用外特性的Tq-n曲线拟合公式为:Tq=-19.313+295.27(n/1000)-165.44(n/1000)2+40.874(n/1000)3-3.8455(n/1000)42.式中,Tq为发动机的转矩(N*m);n位发动机的转速(r/min)。
发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min2.发动机的转矩:将转速带入汽油发动机使用外特性的Tq-n曲线拟合公式,取转速间隔为100r/min,得发动机转矩表如下:表1.1 发动机转矩表n(r/min) Tq(N*m) n(r/min) Tq(N*m) n(r/min) Tq(N*m) 600 106.6211 1800 174.1665 3000 169.7305700 119.4071 1900 174.7145 3100 168.7753800 130.3742 2000 174.947 3200 167.6796900 139.6984 2100 174.9295 3300 166.398 1000 147.5465 2200 174.718 3400 164.8759 1100 154.0762 2300 174.3595 3500 163.0495 1200 159.4357 2400 173.8915 3600 160.8456 1300 163.7643 2500 173.3425 3700 158.1819 1400 167.1918 2600 172.7316 3800 154.967 1500 169.839 2700 172.0688 3900 151.1 1600 171.8172 2800 171.3549 4000 146.471 1700 173.2287 2900 170.5814表1.1.1 发动机转矩表1.1.2 发动机在各档位下的驱动力驱动力计算公式:式中i0=5.83, r=0.367, 4档变速箱传动比ig(数据如下)1档2档3档4档4档变速器 6.03 3.03 1.67 1表1.1.2 各档位传动比将个转速下发动机转矩带入驱动力计算公式可得各档位不同转速下的发动机驱动力发动机驱动力表转速驱动力F(N)转速(r/min) 1档2档3档4档600 8681.245 4362.218 2404.259 1439.676700 9722.296 4885.333 2692.576 1612.321 800 10615.254 5334.033 2939.880 1760.407 900 11374.443 5715.516 3150.136 1886.309 1000 12013.449 6036.608 3327.108 1992.28 1100 12545.101 6303.757 3474.348 2080.448 1200 12981.486 6523.035 3595.204 2152.817 1300 13333.921 6700.130 3692.811 2211.264 1400 13612.996 6840.361 3770.100 2257.545 1500 13828.533 6948.666 3829.793 2293.289 1600 13989.6 7029.6 3874.4 2320 1700 14104.532 7087.352 3906.230 2339.06 1800 14180.889 7125.720 3927.377 2351.723 1900 14225.500 7148.137 3939.743 2359.121 2000 14244.434 7157.651 3944.976 2362.261 2100 14243.010 7156.935 3944.582 2362.025 2200 14225.795 7148.285 3939.814 2359.17 2300 14196.597 7133.613 3931.728 2354.328 2400 14158.494 7114.467 3921.175 2348.009 2500 14113.794 7092.006 3908.795 2340.596 2600 14064.052 7067.011 3895.019 2332.347 2700 14010.090 7039.896 3880.075 2323.398 2800 13951.967 7010.690 3863.978 2313.759 2900 13888.983 6979.041 3846.534 2303.314 3000 13819.699 6944.227 3827.346 2291.824 3100 13741.924 6905.146 3805.806 2278.926 3200 13652.711 6860.317 3781.099 2264.131 3300 13548.366 6807.886 3752.201 2246.827 3400 13424.432 6745.610 3717.877 2226.274 3500 13275.721 6670.885 3676.692 2201.612 3600 13096.280 6580.718 3626.996 2171.854 3700 12879.398 6471.737 3566.931 2135.887 3800 12617.637 6340.205 3494.437 2092.477 3900 12302.780 6181.994 3407.237 2040.262 4000 11925.881 5992.607 3302.856 1977.758表1.1.3 发动机驱动力表1.1.3 发动机在各档位下的车速不同档位下的车速:Ua=0.377*n*r/(i g*i0)式中i0=5.83, r=0.367, 4档变速箱传动比ig(数据如下)1档2档3档4档4档变速器 6.03 3.03 1.67 1表1.1.4发动机驱动力表将各参数带入各档位不同转速对应的车速计算公式可得下表:表1.1.5 各档位不同转速对应车速n(r/min) 1档车车速2档车车速3档车车速4档车车速Ua(km/h) Ua(km/h) Ua(km/h) Ua(km/h) 600 2.361418 4.6994558.52655614.23935 700 2.754987 5.4826979.94764816.61257 800 3.148557 6.2659411.3687418.9858 900 3.5421267.04918212.7898321.35902 1000 3.9356967.83242514.2109323.73225 1100 4.3292668.61566715.6320226.10547 1200 4.7228359.3989117.0531128.4787 1300 5.11640510.1821518.474230.85192 1400 5.50997410.9653919.895333.22515 1500 5.90354411.7486421.3163935.59837 1600 6.29711412.5318822.7374837.9716 1700 6.69068313.3151224.1585740.34482 1800 7.08425314.0983625.5796742.71804 1900 7.47782214.8816127.0007645.09127 2000 7.87139215.6648528.4218547.46449 2100 8.26496216.4480929.8429549.83772 2200 8.65853117.2313331.2640452.21094 2300 9.05210118.0145832.6851354.58417 2400 9.4456718.7978234.1062256.95739 2500 9.8392419.5810635.5273259.33062 2600 10.2328120.364336.9484161.70384 2700 10.6263821.1475538.369564.07707 2800 11.0199521.9307939.7905966.45029 2900 11.4135222.7140341.2116968.82352 3000 11.8070923.4972742.6327871.19674 3100 12.2006624.2805244.0538773.56997 3200 12.5942325.0637645.4749675.94319 3300 12.987825.84746.8960678.31642 3400 13.3813726.6302448.3171580.68964 3500 13.7749427.4134949.7382483.06286 3600 14.1685128.1967351.1593385.43609 3700 14.5620828.9799752.5804387.80931 3800 14.9556429.7632154.0015290.18254 3900 15.3492130.5464655.4226192.55576 4000 15.7427831.329756.8437194.92899表1.1.5 各档位不同转速对应的车速1.1.4 行驶阻力Ff+Fw汽车行驶方程式Ff=Ff+Fw+Fi+Fj式中Ff-滚动阻力,Fw-空气阻力,Fi-坡度阻力,Fj-加速阻力汽车驱动力-行驶阻力平衡图把汽车行驶中经常遇到的滚动阻力Ff,空气阻力Fw叠加到行驶阻力Ff+Fw=Gf+CD*A/21.15*ua2=mgf+CD*A/21.15*ua2=3880*10*0.013+2.77/21.15*ua2=504.4+2.77/21.15*ua2式中,G-作用于汽车上的重力m-汽车总质量g-重力加速度f-滚动阻力系数CD-空气阻力系数A-迎风面积(m2)Ua-汽车行驶速度(km/h)1档车速1档驱动力2档车速2档驱动力3档车速3档驱动力4档车速4档驱动力u(km/h) F(N) u(km/h) F(N) u(km/h) F(N) u(km/h) F(N)2.3614188681.245 4.6994554362.2188.5265562404.25914.239351439.6762.7549879722.298 5.4826974885.3349.9476482692.57716.612571612.3213.14855710615.25 6.265945334.03211.368742939.87918.98581760.407 3.54212611374.447.0491825715.51512.789833150.13521.359021886.3093.93569612013.457.8324256036.60814.210933327.10723.732251992.284.32926612545.18.6156676303.75715.632023474.34826.105472080.4484.72283512981.489.398916523.03417.053113595.20428.47872152.8175.11640513333.9210.182156700.13118.47423692.81130.851922211.264 5.5099741361310.965396840.36219.89533770.133.225152257.5455.90354413828.5311.748646948.66521.316393829.79235.598372293.2896.29711413989.612.531887029.60122.737483874.437.971623206.69068314104.5313.315127087.35124.158573906.2340.344822339.067.08425314180.8914.098367125.7225.579673927.37742.718042351.723 7.47782214225.514.881617148.13727.000763939.73245.091272359.1217.87139214244.4415.664857157.65128.421853944.97647.464492362.2618.26496214243.0116.448097156.93529.842953944.58149.837722362.0258.65853114225.7917.231337148.28431.264043939.81352.210942359.179.05210114196.618.014587133.61432.685133931.72854.584172354.3289.4456714158.4918.797827114.46734.106223921.17556.957392348.0099.8392414113.7919.581067092.00535.527323908.79559.330622340.59610.2328114064.0520.36437067.01236.948413895.0261.703842332.34710.6263814010.0921.147557039.89738.36953880.07564.077072323.39811.0199513951.9721.930797010.68939.790593863.97766.450292313.75911.4135213888.9822.714036979.04141.211693846.53468.823522303.31411.8070913819.723.497276944.22742.632783827.34671.196742291.82412.2006613741.9324.280526905.14644.053873805.80773.569972278.926 12.5942313652.7125.063766860.31845.474963781.09975.943192264.13112.987813548.3625.8476807.88446.896063752.278.316422246.82713.3813713424.4326.630246745.61148.317153717.87880.689642226.27413.7749413275.7227.413496670.88549.738243676.69283.062862201.61214.1685113096.2828.196736580.71651.159333626.99585.436092171.85414.5620812879.428.979976471.73852.580433566.93187.809312135.88714.9556412617.6329.763216340.20454.001523494.43690.182542092.47715.3492112302.7830.546466181.99455.422613407.23792.555762040.262 15.7427811925.8831.32975992.60656.843713302.85594.928991977.758表1.1.6 各档位不同车速对应的驱动力车速u(km/h) Ff+Fw 车速u(km/h) Ff+Fw 车速u(km/h) Ff+Fw 0504.442735.4298841428.5192504.923944757.9565861473.0494506.495546781.531881518.6266509.114948806.1532901565.2518512.78250831.8232921612.92410517.496952858.5409941661.64412523.259654886.3064961711.41314530.0756915.1196981762.22916537.928158944.98061001814.09318546.83460975.88941021867.00420556.7877621007.8461041920.96422567.7891641040.851061975.97124579.8383661074.9021082032.02626592.9352681110.0021102089.12828607.0799701146.1491122147.27830622.2723721183.3451142206.47732638.5125741221.5881162266.72234655.8005761260.8781182328.01636674.1362781301.2171202390.35738693.5196801342.60340713.9508821385.037图1.2 汽车驱动力与阻力平衡图1.2求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率1.2.1汽车最高车速的确定Ua max=0.377*rn/i g i0=94.93(km/h)1.2.2汽车最大爬坡度的确定所谓汽车的爬坡度,是指汽车在良好路面上克服Ff+Fw后的余力全部来(即等速)克服坡度阻力是能爬上的坡度,所以du/dt=0。
汽车运行材料(大作业)
论述题(每小题20分,共100分)1.试论述为延长轮胎使用寿命,对轮胎使用的基本要求或措施。
(1)经常保持轮胎的正常气压。
各种不同类型汽车的轮胎使用时,都要保持规定的标准工作气压(不是轮胎上标示的最高气压),误差不应超出土19.6 kPa,2)中山违章驾驶员行车时,应正确操作。
要做到起步、停车平稳,避免使用紧急制动,坚持中速行驶.注意路面的选择,尽量避免轮胎不正常变形、升温和冲击等带来的磨损和损坏.(3)合理装载,做到不超载、不偏载,避免轮胎超负荷运转.(4)合理选配和安装。
同一辆汽车(至少是同车桥)上要选用规格尺寸、花纹、帘布材料和层级相同的轮胎.安装时,前轮应装用质量好的轮胎,后轮双胎在满载时的间距应不小于 2 cm,并应将外直径较大轮胎的装在外侧。
人字花纹轮胎要按前进时人字尖端先粉地的要求安装.(5)适时进行轮胎换位。
通常在汽车二级维护或发现轮胎有非正常磨损时,进行轮胎换位。
2. 试论述汽油蒸发性的评定指标馏程中各典型馏分的蒸发温度及各自代表的含义。
汽油的蒸发性是指汽油由液态转化为气态的性质,其评定指标为熘程和饱和蒸汽压。
对于汽油、柴油,是以一定馏出量的蒸发温度等表示馏程的。
典型馏分的蒸发温度主要有:初馏点、10%蒸发温度、50%蒸发温度、90%蒸发温度和终馏点。
(1)10%蒸发温度的影响。
汽油的 10%蒸发温度表示汽油中轻质馏分含量的多少,它对发动机的低温起动性和供油系统产生气阻的可能性影响很大。
汽油的 10%蒸发温度越低,含轻质馏分越多,发动机在低温条件下容易起动。
但是,汽油的 10%蒸发温度越低,汽车在高温条件下使用时容易使供油系统产生气阻,甚至中断。
(2)50%蒸发温度的影响。
汽油的 50%蒸发温度表示汽油中中间馏分(位于轻质和重质之间的汽油馏分)的多少,它表示汽油的平均蒸发性,影响汽油机的预热时间、加速性和运转稳定性。
发动机起动后要进行预热,温度上升到50℃:左右时汽车才宜起步。
汽车理论大作业 (2)
汽车理论大作业20100410420车辆四班杨江林1.内容本文在MATLAB/Simulink中搭建ABS模型,将ABS对整车的性能影响进行仿真,并对仿真结果进行分析来证明方法的可行性。
2.原理由轮胎纵向力特性可知,车轮的滑移率b s 决定了制动力和侧向力的大小。
公式1给出了车轮滑移率b s 的定义。
式中,为车速,对应线速度,V V 为汽车线速度,r R 为车轮半径,为车轮线速度。
如图1所示为车辆在制动行使时,地面作用于车轮的制动力sb F 和侧向力y F 随车轮制动滑移率b s 的变化关系。
可以看出,侧向力随滑移率b s 的增加而下降,当滑移率从1降为0时,制动力开始随滑移率的增加而迅速增加;当滑移率增至某值opt s 时,制动力则随滑移率的增加而迅速减少。
公式1说明了车速与轮速的关系:当滑移率为1时,车速与轮速相等;当滑移率为0时,车轮已经处于抱死状态。
车轮抱死滑移时,不仅制动力减少,制动强度降低,而且车轮侧向附着力也大大减少。
因此,当前轮抱死滑移时,车辆丧失转向能力;而后轮抱死滑移则属于不稳定工况,易引起车辆急速甩尾的危险。
图1滑移率与附着系数的关系根据制动时附着系数与滑移率的关系曲线可知,当把车轮滑移率的值控制在最佳滑移率20%附近时,汽车将能够获得最好的制动效能同时还拥有较好的方向稳定性。
附着系数的数值主要取决于道路的材料、路面的状况、轮胎的结构、胎面花纹、材料以及车速等因素。
因此对于不同的路面来说,附着系数与滑移率的关系是不同的。
图2是不同路面的附着系数与滑移率的关系。
图2 不同路面的附着系数与滑移率的关系利用车轮滑移率的门限值及参考滑移率设计控制逻辑,使得车轮的滑移率保持在峰值附着系数附近,从而获得最大的地面制动力和最小的制动距离。
同时获得较大的侧向力,保证制动时的侧向稳定性。
ABS 工作原理图3. 模型由于汽车动力学模型建立是个复杂的过程,采用单轮模型建立汽车动力学模型。
简化的单轮模型如图3。
汽车评估大作业题目
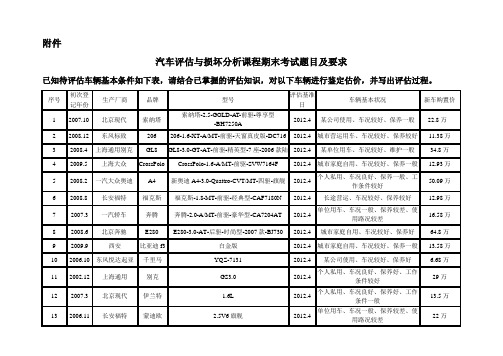
附件汽车评估与损坏分析课程期末考试题目及要求已知待评估车辆基本条件如下表,请结合已掌握的评估知识,对以下车辆进行鉴定估价,并写出评估过程。
序号初次登记年份生产厂商品牌型号评估基准日车辆基本状况新车购置价1 2007.10 北京现代索纳塔索纳塔-2.5-GOLD-AT-前驱-尊享型-BH7250A2012.4 某公司使用、车况较好、保养一般22.8 万2 2008.12 东风标致206 206-1.6-XT-A/MT-前驱-天窗真皮版-DC716 2012.4 城市营运用车、车况较好、保养较好11.38 万3 2008.4 上海通用别克GL8 GL8-3.0-GT-AT-前驱-精英型-7座-2006款陆2012.4 某单位用车、车况较好、维护一般34.8 万4 2009.5 上海大众CrossPolo CrossPolo-1.6-A/MT-前驱-SVW7164F 2012.4 城市家庭自用、车况较好、保养一般12.93 万5 2008.2 一汽大众奥迪A4 新奥迪A4-3.0-Quattro-CVT/MT-四驱-旗舰2012.4 个人私用、车况良好、保养一般、工作条件较好50.09 万6 2008.8 长安福特福克斯福克斯-1.8-MT-前驱-经典型-CAF7180N 2012.4 长途营运、车况较好、保养较好12.98 万7 2007.3 一汽轿车奔腾奔腾-2.0-A/MT-前驱-豪华型-CA7204AT 2012.4 单位用车、车况一般、保养较差、使用路况较差16.58 万8 2008.6 北京奔驰E280 E280-3.0-AT-后驱-时尚型-2007款-BJ730 2012.4 城市家庭自用、车况较好、保养好64.8 万9 2009.9 西安比亚迪f3 白金版2012.4 城市家庭自用、车况较好、保养一般13.58万10 2006.10 东风悦达起亚千里马YQZ-7131 2012.4 某公司使用、车况较好、保养好 6.68万11 2002.12 上海通用别克GS3.0 2012.4 个人私用、车况良好、保养好、工作条件较好29万12 2007.3 北京现代伊兰特 1.6L 2012.4 个人私用、车况良好、保养好、工作条件一般13.5万13 2006.11 长安福特蒙迪欧 2.5V6旗舰2012.4 单位用车、车况一般、保养较差、使用路况较差22万14 2005.7 上海大众波罗五速手动基本型1.4L(SVW7144ALi) 2012.4 城市家庭自用、车况较好、保养好9.08万15 2009.9 上海大众帕萨特领驭1.8T 2012.4 某公司使用、车况较好、保养较好19万16 2003.7 德国宝马宝马318i旅行款2012.4 某公司使用、车况较好、保养好35万17 2008.5 一汽丰田丰田皇冠Royal2.5AT/MT真皮版2012.4 某公司使用、车况较好、保养好34万18 2007.1 广州本田本田雅阁 2.0L 2012.4 城市家庭自用、车况较好、保养好21.6万19 2003.1 广州本田本田雅阁 2.3L 2012.4 城市家庭自用、车况较好、保养好22.98万20 2006.3 上海通用别克赛欧 1.8L 2012.4 单位用车、车况一般、保养较差、使用路况较差9.3万21 2006.5 东风雪铁龙波尔多红爱丽舍03款1.6 MT 16V -VTS版2012.4 某公司使用、车况较好、保养一般12.78万22 2010.2 东南(福建)克莱斯勒(国产)300C2.7豪华2012.4 城市营运用车、车况较好、保养较好30.98万23 2005.7 韩国现代盛达菲 2.7V6 2012.4 某单位用车、车况较好、维护一般23万24 2005.11 上海通用别克君威 2.5自动舒适版2012.4 城市家庭自用、车况较好、保养一般25.3万25 2005.8 一汽大众奥迪A4-3.0Quattro 2012.4 个人私用、车况良好、保养一般、工作条件较好65万26 2009.1 江西利亚纳两厢1.6 MT 2012.4 长途营运、车况较好、保养较好9.26万27 2007.2 沈阳中华 2.4 舒适版2012.4 单位用车、车况一般、保养较差、使用路况较差19.58万28 2008.2 沈阳金杯阁瑞斯2.4 豪华版2012.4 城市家庭自用、车况较好、保养好13.98万29 2009.8 天津一汽威志 1.3豪华型2012.4 城市家庭自用、车况较好、保养一般 6.28万30 2009.6 上海大众明锐 1.8TSI 手自动一体逸尊版2012.4 某公司使用、车况较好、保养好19.88万31 2005.11 韩国现代酷派 2.7 A/MT 2012.4 个人私用、车况良好、保养好、工作条件较好19.57万32 2009.6 德国宝马宝马Z4 2012.4 个人私用、车况良好、保养较好、工作条件较好70万33 2008.7 一汽大众奥迪A62.0T(CVT) 2012.4 单位用车、车况一般、保养一般、使用路况好36万34 2004.6 上海大众帕萨特SVW7183FJi 2012.4 城市家庭自用、车况较好、保养好22万35 2007.3 哈飞中意 1.1LMT 2012.4 单位用车、车况一般、保养较好、使用路况较差3万36 2007.6 吉利美人豹 1.3 MT 2012.4 个人私用、车况良好、保养较好、工作条件较好6.98万要求:1、书写工整,思路清晰,方法合理,依据充分,结论准确。
行车使用作业指导书 (2)

行车使用作业指导书一、概述行车使用作业指导书是为了确保驾驶员正确、安全地操作车辆,提供详细的指导和规范。
本指导书旨在匡助驾驶员了解车辆的基本操作和安全要求,以确保行车过程中的安全性和有效性。
二、车辆基本操作1. 车辆启动与熄火操作- 检查车辆是否处于停车档位,并拉紧手刹。
- 插入钥匙并转动至启动位置,同时观察仪表盘上的指示灯。
- 启动后,观察发动机是否正常运转,听是否有异常声音。
- 熄火操作时,将车辆停稳,并将手刹拉紧,将钥匙转至熄火位置。
2. 换挡操作- 在起步前,确保车辆已经处于空档位,并同时踩下离合器和制动器。
- 根据需要,将档位从空挡逐渐换至所需挡位,同时逐渐放松离合器和制动器。
- 换挡时,需保持平稳的速度和节奏,避免急刹车或者急加速。
3. 方向盘操作- 在行车过程中,保持双手握住方向盘,并保持稳定的握持力。
- 转弯时,根据需要适时打转方向盘,保持稳定的转向动作。
- 避免过度转动方向盘,以免造成控制失灵或者失控的风险。
4. 刹车操作- 在需要刹车时,用力踩下制动踏板,并保持稳定的刹车力度。
- 避免急刹车,以免造成车辆失控或者后方车辆追尾的危(wei)险。
- 在下坡行驶时,适时使用引擎制动和手刹,以避免刹车过热或者失灵。
三、行车安全要求1. 安全带使用- 在行车过程中,驾驶员和乘客都应系好安全带,确保人身安全。
- 安全带应密切贴合身体,不能过松或者过紧。
- 长期行车后,应适时调整安全带位置,以保持舒适。
2. 限速要求- 在道路上行驶时,必须遵守交通规则中的限速要求。
- 道路上的限速标志应成为驾驶员的参考,避免超速行驶。
- 根据道路状况和天气情况,适时调整车速,确保行车安全。
3. 保持车距- 在行车过程中,应保持与前车的安全距离,以便有足够的制动距离。
- 根据车速和道路状况,合理调整车距,避免追尾事故的发生。
- 遇到雨雾等恶劣天气时,应适当增加车距,提高行车安全性。
4. 注意观察- 在行车过程中,驾驶员应时刻保持警觉,注意观察道路情况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统组成如下:(1)动力系统(蓄电池组、直流无刷电机);(2)传动系统(轮边减速器):(3)行走系统(轮胎、前车架、后车架、摆动架):(4)转向系统(电动推杆,铰接体):(5)通信系统(车载无线AP、网络交换机、遥控装置接收器);(6)信息采集系统(激光雷达、里程计、惯性导航模块、转角传感器):(7)控制系统(主控制器、信号采集控制器、DSP电机驱动控制器):(8)遥控系统(工业遥控器)动力系统由蓄电池组构成(24V蓄电池组2组,48V蓄电池组1组),作为整车的动力源以及控制电源。
四轮独立驱动,动力分别由四个轮边电机经过轮边减速器传递到车轮。
行走系统由前后两个车架组成,车架由槽钢焊接,前后车架通过较接体与摆动架相连,可以实现车体的转向和摆动。
转向系统采用电动推杆(带有减速机构的直流无刷电机)代替转向油缸实现转向。
信息采集系统的构成与实车相同,包括激光雷达、里程计、转角传感器、惯性导航模块等,同样为了实现信息采集从而获取地面信息以及车体位姿信息。
通信系统的构成与实车相同,包括车载无线AP、网络交换机、遥控装置接收器,采用CAN总线和以太网通信,同样为了实现各个系统之间的数据交控制系统采用工控机以及信号采集控制器、DSP电机驱动控制器来实现模型样机的遥控操作以及无人驾驶。
跟实车有所不同的是采用DSP电机驱动控制器取代了实车的执行控制器PLC,原因是DSP在对行驶驱动电机和转向电动推杆的控制上比执行控制器PLC更为方便。
1动力系统地下铰接式自卸车实车采用柴油机作为动力源,而模型样机则采用蓄电池组作为动力源。
本文的研究目的是验证路径跟踪以及速度决策算法,作为研究对象的实车和模型样机均采用铰接转向与电传动结构,在运动关系上相同,所以动力源的不同不会影响到运动控制的研究,同时考虑到实验室环境不便于采用柴油机,因此选取蓄电池作为模型样机的动力源。
模型样机的动力系统由两组24V蓄电池组构成。
其中一组作为主动力源,用来给行驶驱动电机和转向电动推杆供电;另一组作为控制电源,用来给信息采集系统、各传感器以及控制系统的控制器等供电。
2.信息采集系统实车和模型样机的信息采集系统都包括激光雷达、里程计、转角传感器、惯性导航模块等车载传感器,通过对传感器信息的采集,得到地面信息以及铰接车位姿信息(包括航向角、较接转向角以及行驶速度等)。
2.1传感器的选取及布置传感器是实现地下铰接式自卸车等无轨采矿设备无人驾驶的关键元件,传感器在无人驾驶中的作用主要有:目标和障碍物检测、自身位置信息估计。
用于无人驾驶路面环境感知的传感器主要有视觉传感器(摄像头)、激光雷达,超声波雷达、红外传感器。
而其他辅助传感器还包括里程计、转角传感器、陀螺仪等。
每种传感器都有其自身的特点及局限性。
视觉传感器(CCD摄像机)可以获得丰富的井下环境的信息量,并能够对目标边缘信息进行精确估计,但是巷道照明不足导致成像质量不高,数据量大,会使控制器增加处理负担,延长计算时间。
超声波雷达使用方便,价格也较低,但是其探测波束角过大,方向性不好,很难精确确定反射目标点的方位,通常只能提供目标的距离信息,对目标的边界信息量提供不足,而且超声波在传播过程中会有一定的能量衰减,容易发生镜面反射,在较远距离测量时会导致测距误差偏大,同时信号的采集周期长,实时性不好。
红外传感器利用传输时间的原理,通过记录并处理从光脉冲发出到返回被接收所经历的时间,来测定目标距离。
虽然红外传感器具有无盲区、方向性强、测量精度高、反应速度快等优点,但是受环境的影响较大、探测距离近,不满足实际工作要求。
激光雷达的激光波束角小,方向性强,测量精度较高,能对巷道壁进行连续扫描,获取激光雷达扫描平面上的巷道地光和墙壁信息特征,这些信息能够从微观上反映出巷道内小尺寸凹凸情况,同时从宏观上体现巷道走势,同时利用激光雷达的扫描信息也能提供较接车在巷道内的相对位置,从而为无人驾驶提供了非常重要的信息,因此选取激光雷达作为路径跟踪和地形分类的主要传感器。
里程计用来测量实车及模型样机的车速及行驶距离,作为辅助传感器。
转角传感器用来测量较接处的前后车体铰接转向角,作为辅助传感器。
惯性导航模块用来测量整车三轴角速度与三轴加速度,作为辅助传感器。
2.2激光雷达激光雷达作为实现无人驾驶的主要传感器,用来感知井下巷道环境,包括地形起伏与巷道壁走势。
激光雷达安装在实车及模型样机的前车体的前方,最大扫描角度为190度,最大检测距离可达到80m,角分辨率可调:分别为0.25/0.5/1°,对应的扫描频率为35/50/75Hz。
其作用是获取车体前方巷道环境信息,用以实现导航及地形检测。
根据IP通信协议,通过以太网采集激光雷达的数据,提供给主控制器。
2.3里程计里程计用来测量实车及模型样机的行驶速度和距离。
实车所用的里程计是电感式传感器,安装在轮边电机处,并配有一个金属齿盘。
电感式传感器是检测使用铁芯和线圈构成的探头接近金属齿盘齿端面时感应到的磁场变化,并通过外部整流放大电路,将信号调理成方波,当探头每经过一个齿就会对应产生一个方波信号,通过对方波的计数,从而计算出行驶速度和距离模型样机所用的里程计是霍尔传感器,内置在四个行驶驱动电机的控制器中,通过霍尔传感器测量得到电机转动时的脉冲信号输出,采集各个电机的输出脉冲,然后根据模型样机车轮的滚动半径,就可以计算出模型样机的行驶速度和距离。
2.4转角传感器转角传感器安装在前后车体中间铰接处,用来测量敢后车体之间的铰接转向角,转角传感器供电电压24V,测量范围0-135”,输出信号4-20mA或者0-5V。
实车和模型样机所用的转角传感器相同,安装位置均在中间较接处,采用的是电流型输出(4-20mA),采集方式均为在输出端串联2502电阻转换成电压信号后进行采集。
2.5惯性导航模块惯性导航模块安装在激光雷达上方,用来测量雷达和整车姿态。
惯性导航模块中包含三轴陀螺仪和三轴加速度计。
陀螺仪根据谐振器陀螺原理工作,当有角速率输入时,依据科里奥利原理,传感器产生一个正比于此旋转角速率的电压信号,利用采集系统将此电压信号提取出来然后利用时间积分就可以得到旋转角度值。
主要用作测量角度。
电容式加速度计能够感测不同方向的加速度或振动等运动状况。
其主要为利用硅的机械性质设计出的可移动机构,机构中主要包括两组硅梳齿,一组固定,另一组随即运动物体移动:前者相当于固定的电极,后者的功能则是可移动电极。
当可移动的梳齿产生了位移,就会随之产生与位移成比例电容值的改变。
主要用作测最整车振动情况。
3.通信系统实车和模型样机的通信系统构成相同,都包括车载无线AP、网络交换机、遥控装置接收器。
车载无线AP(Access Point)即无线接入点,它是主要用于无线网络的无线交换机,也是整个无线网络的核心。
无线AP是移动计算机用户进入有线网络的接入点,主要用于大楼内部、园区内部以及宽带家庭,覆盖距离几十米至上百米,目前主要的技术协议为802.11系列.在本文中无线AP的作用是将车载系统作为无线工作站与地下通信系统(基站)进行相互通信。
网络交换机在车载系统中的作用是构建内部的有线局域网,实现网内各个系统间的以太网通信。
遥控装置接收器通过与遥控装置之间的无线通信传递遥控控制信号。
4.控制系统实车的控制系统分为硬件部分和软件部分,硬件主要由三部分组成:主控制器、信号采集控制器和执行控制器。
软件分为主控制程序、无人驾驶控制程序和PLC控制程序。
控制系统通过软件和硬件的配合,实现人工操作、遥控操作以及无人驾驶功能。
4.1控制系统设计其中主控制器采用装有Windows7系统的工控机;信号采集控制器使用STM32单片机;执行控制器采用车载PLC控制器。
主控制器带有一路10MW100M的以太网(Ethernet)接口和两路CAN总线接口,其中利用以太网来传输激光雷达原始距离信号的数据;利用CAN总线来进行各系统之间的通信并协调处理各系统之间的动作时序。
它的作用是利用各传感器数据计算导航控制策略,通过CAN总线与执行控制器通信,以控制执行部件的动作。
信号采集控制器以带有一路CAN总线接口,主要作用是采集惯性导航模块、里程计、转角传感器信号,并通过CAN总线发送至主控制器。
执行控制器PLC带有两路CAN总线,其中一路用来与主控制器进行信息交互,另一路用于下载程序。
车载传感器的信号通过PLC的10口检测并且传给主控制器,主控制器通过执行控制器PLC来控制执行部件的动作信号,这些执行部件包括转向步进电机、油门电玻阀、档位电磁阀等。
模型样机的控制系统与实车略有不同。
采用DSP电机驱动电路取代了执行控制器PLC。
信号采集控制器实现车载传感器信号的检测,DSP电机驱动控制器则负责控制行驶驱动电机和转向电动推杆,实现对行驶速度和转向角度的控制。
4.2控制系统软件设计为了实现实车及模型样机的人工操作、遥控操作以及无人驾驶功能,需要通过控制程序来实现各个系统的协调工作。
控制程序包括三部分:第一部分是主控制器的主控制程序,主要作用是完成整个控制系统的协调控制。
第二部分是主控制器的无人驾驶控制程序,主要作用是提供无人驾驶控制策略。
第三部分是执行控制器PLC程序,主要作用是完成三种工作模式下的实车的信号检测和执行部件的操作。
对于模型样机来说,采用信号采集控制器和DSP电机驱动控制器取代了执行控制器PLC,其中,信号采集控制器负责定时对传感器的信号进行采集和预处理,然后将处理过的信号通过CAN总线传输给主控制器,而DSP电机驱动控制器程序的主要作用是控制行驶驱动电机和转向电动推杆,从而实现对行驶速度与转向角度的调整。