AMF零点定位系统产品说明书
AMF 系列 科里奥利质量流量计 用户手册说明书
AMF系列科里奥利质量流量计用户手册加拿大处弗洛有限公司TRUFLOW CANADA INC.目录0前言 (1)设备检查 (1)公司信息 (1)1安全说明 (1)1.1法律和指令 (1)1.2危险区域安装 (1)2原理及应用 (2)2.1测量原理 (2)2.2应用 (2)2.3设计 (2)3AMF系列技术规格 (3)3.1技术参数 (5)4安装 (6)4.1安全预防措施 (6)4.2安装简介 (6)4.3安装形式 (7)4.4变送器电气连接 (11)4.4.1电源线连接 (11)4.4.2脉冲输出接线 (11)4.4.3RS-485通讯口接线 (11)4.4.4电流环/HART输出接线 (11)5调试 (12)5.1电源 (12)5.2调零 (12)6服务/维护..............................................................126.1维护 (12)6.2运输/存储 (12)6.3维修 (12)6.4技术支持 (12)7.订购信息 (13)附录A故障分析 (16)附录B质量流量计变送器MODBUS协议使用手册17 B.1常规技术数据 (17)B.2电气连接 (17)B.2.1RS-485连接 (17)B.2.2通信设置 (17)B.3MODBUS协议 (17)B.3.1Modbus RTU (17)B.3.2数据类型 (17)B.3.3常用寄存器 (18)B.3.3.1过程测量寄存器 (18)B.3.3.2通信配置寄存器 (18)B.3.3.3过程控制寄存器 (20)B.3.3.4传感器参数寄存器 (22)附录C显示器操作手册 (23)C.1基本信息 (23)C.1.1显示单元 (23)C.1.2按键定义 (23)C.2功能表介绍 (23)C.2.1主界面详解 (23)C.2.2设置和查看界面 (24)变送器配置和产品定制信息 (26)0前言1)手册内容包含使用本设备所需的全部信息。
Micropulse 位置测量系统介绍及应用领域说明书

Large valve with controlled actuating driveAreas of use in which high reliability and precision are in demand are typical application areas for Micropulse Transducers.As integrated or compact versions with measuring lengths of 25 to 7,620 mm, Micropulse position measuring systems are able to be used universally.The non-contact working principle of the systems guarantees completefreedom from wear and a virtually endless service life. The high-preci-sion output signal serves as an absolute signal for the controller in a wide range of different interfaces.As a position measuring system for actual value recording, integrated in the pressure area of hydraulic cylinders, Micropulse Transducers are used in the most varied areas.Mobile hydraulicsAreas of application■Pitch adjustment on wind generators ■Positioning refl ection channels on thermosolar power plants ■Large, hydraulically powered valves ■Casting and rolling mills ■Lift controls ■Flight simulators ■Foundries■Logging machines■Automation engineering■Hydroelectric power stations ■Locks and fl oodgates ■Construction machinery ■Combine harvestersIndustrial applications ■Pumps and compressors ■Elevator and lifting technology ■Forging presses■High-pressure hydraulicsMicropulse TransducersA pplications Industry: hydraulic cylinder Heavy-duty cylinders raise the bridge to the planned road level after they are "fl oated" into position.s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mSolar-thermal parabolic trough power plantSawmill machineryHydraulic riveting systemWind power plantMicropulse TransducersApplicationsMicropulse Transducers Applications Operating principle Design Product overview Profi le P Profi le PF Profi le AT Profi le BIWRod Rod Compact and Rod AR Rod EX, T Redundant and CD Filling Level Sensor SFAccessories BasicInformation and Defi nitionsSolar-thermal parabolic trough power plants y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mIn the automation of a wide range of different machine types, the high-priority requirements include maximum precision, no wear, easy installation, a high degree of protection and an advantageous price. Micropulse Transducers in a profi le housing fulfi ll requirements in the automation industry 100%.Areas of application ■Injection molding ■Pressing■Handling systems ■Portal robots■Woodworking machinery ■Packaging machinery ■Conveying■Straightening machinery ■Surgical tables■Concrete block making machineryInjection molding machineryFilm slitting machinery Micropulse TransducersApplicationsInjection molding machinerys y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mLevel monitoringLaundry pressThe non-contact magnetostrictive working principle is also ideal forspecial position measurement tasks.Areas of application ■Process technology ■Filling of foodstuffs■Level monitoring in milk tanks ■Filling units■Perfume manufacturing ■Pharmaceuticals ■Producing alcoholAutomation engineering Multiple-stage pressMicropulse TransducersApplicationsMicropulse + position measuring systems guarantee cost-effectiveness and quality in the manufacture of concrete blocks. In a concrete block machine, the Micropulse + position measuring system simultaneously and reliably measures the axis position of load and molding stroke movement.Micropulse Transducers Applications Operating principle Design Product overview Profi le P Profi le PF Profi le AT Profi le BIW Rod Rod Compact and Rod AR Rod EX, T Redundant and CD Filling Level Sensor SFAccessories BasicInformation and Defi nitionss y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mMicropulse TransducersOperating principleThe measuring element, the waveguide, consists of a special nickel-iron alloy with 0.7 mm outer and 0.5 mm inner diameter. A copper conductor is threaded through this tube. A short current pulse triggers the measurement process. This current generates a circular magnetic fi eld which, due to soft magnetic properties of the wave guide, isintegrated into it. A permanent magnet at the point of measurement is used as the marker element, whose lines of fi eld run at right angles to the pulsed magnetic fi eld.In the area of the wave guide, where both magnetic fi elds aresuperimposed, there is an elastic deformation in the micro range of the structure due to magnetostriction, which generates a mechanical wave that spreads on both sides.The nominal propagation velocity of this wave in the waveguide is 2,830 m/s, and is almost completely insensitive to environmental Operating principlee c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m af h .c o mRod housingsRod system componentsRod housings are mainly used in hydraulic cylinder applications. When installed in the pressure section of the hydraulic cylinder, the displacement sensor requires the same pressure rating as the actual hydraulic cylinder. In practice, the sensor must be able to withstand pressures up to 1,000 bar. The electronics are integrated in an alu-minum or stainless steel housing and the waveguide in a pressure-resistant tube made from nonmagnetic stainless steel that is sealed off at the front end with a welded plug. An O-ring seal in the fl ange at the opposite end seals off the high-pressure section. An magnet ring with magnets slides over the tube or rod with internal waveguide to mark the position prior to detection.A position measuring system consists of the actual transducer, themagnet and wiring for the electronic evaluation unit.Micropulse TransducersDesign Position measuring systems with electronic head andpressure-resistant encapsulated measurement section+Magnet ringsMicropulse Transducers Applications Operating principle Design Product overview Profi le P Profi le PF Profi le AT Profi le BIW RodRod Compact and Rod AR Rod EX, T Redundant and CD Filling Level Sensor SF Accessories BasicInformation and Defi nitionss y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mMicropulse TransducersDesignPosition measuring system with integrated measurement section and electronics+=Profi le housingsProfi le system componentsThe electronics and the waveguide are housed in an aluminumprofi led housing. The aluminum housing is sealed according to IP 67. The magnets act on the waveguide through the wall of the aluminum profi le.There are two different versions of magnet, namely captive and fl oating magnets. Floating magnets are secured directly on the moving machine part and move with the part above and along the profi le at a specifi ed distance. The advantage is that guide precision is not an issue with this type of sensor. The sensors tolerate anoffset to the side and at the height of up to a few millimeters. If these generous tolerances are exceeded, you can always revert to using captive magnets. With captive magnets, the profi le housing of the displacement sensor acts as a sliding rail along which the magnet travels. In this case, a control arm with spherical heads compensates for even highly unparallel movements.A position measuring system consists of the actual transducer, themagnet and wiring for the electronic evaluation unit.Maximum distance of 15 mm between theposition measuring system and the fl oating MagnetFloating andcaptive magnetsMagnets y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .cMicropulse TransducersDesignExplosion-proof versionsMany applications require the use of displacement sensors inpotentially explosive areas. Flameproof magnetostrictive Micropulse Transducers are available in a wide range of designs for use in zones 0 and 1.Magnetostrictive displacement sensors are ideal for applications requiring a high degree of safety or availability. The sensors often have a 2-times or even 3-times redundant design in order to ensure mutual monitoring or provide a reserve channel when required. A displacement sensor with a 3-times redundant design incorporates 3 adjacent waveguides offset by 120° and housed in a collective protective tube along which a magnet moves, in much the same way as on standard housings. The magnets on the magnet act on all three measurement sections simultaneously. The evaluation of the 3 positions is done by 3 independent sets of electronics which are integrated into the same housing. Application examples include ship propulsion drives, power stations and train inclination technology.Safety through redundancyMicropulse Transducers Applications Operating principle Design Product overview Profi le P Profi le PF Profi le AT Profi le BIW Rod Rod Compact and Rod AR Rod EX, T Redundant and CD Filling Level Sensor SF Accessories BasicInformation and Defi nitionss y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .cMicropulse TransducersP roduct overview extremely ruggedand reliableSeries Profi le style Profi le style Profi le AT Profi le BIW Rod RodCompact DesignPPFA1P1B, A, Z, YH, K, WInstallation versione.g. in hydraulic cylinders ■ ■External fi tting version e.g. on machine frames ■ ■ ■ ■Filling level sensor e.g. device fi lling systemsSpecial approvalsMagnet Floating/captive Floating/captiveFloatingCaptive push rod Ring or fl oat Ringor fl oatMulti-Magnet ■ ■ ■InterfacesAnalog voltage0...10 V , 10...0 V , –10 V ...10 V ■ ■ ■ ■ ■ ■ Analog current4...20 mA, 0...20 mA ■ ■■ ■ ■SSI ■ ■ ■SSI-SYNC ■ ■ ■CANopen ■ ■ ■ DeviceNet ■Profi bus DP■ ■ Start/stop pulse interface ■ ■ ■VARAN ■EtherCAT ■ ■ ■IO-Link ■From page76104116130136170s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .cMicropulse TransducersProduct overviewRodPro Compact Rod AR Rod DEX RodJ-DEXCTA12Rod NEX Rod PEX RodRedundant Filling level sensor HB/WBE2/E28B/JCK, B, ZB, ZTSF■ ■ ■ ■ ■ ■VehicleapprovalPotentially explosive operation Potentiallyexplosive operation Potentially explosive operation Potentially explosive operationCertifi ed forfoodstuffs KBA, e1Flameproof "d" zone 0,zone 1, ATEX, KOSHA, GOST, IECEX Flameproof "d", zone 0,Zone 1, ATEX,NEC, CSA, IECEX Protection type "n" zone 2Dust protec-tion zone 22Increased safety2 or3 times redundant Conforms with FDA, 3A, ECOLAB, EHEDG Ring or fl oat Ringor fl oatRing or fl oatRing or fl oatRingor fl oatRingor fl oatRing or fl oatFloat■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ■■ ■ ■■ ■■ ■■■ ■ ■ ■ ■ ■ ■190196204204204204204226Micropulse Transducers Applications Operating principle Design Product overview Profi le P Profi le PFProfi le AT Profi le BIW Rod Rod Compactand Rod AR Rod EX, T Redundant and CDFilling LevelSensor SFAccessories BasicInformation and Defi nitionss y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o m。
K20新型零点定位系统
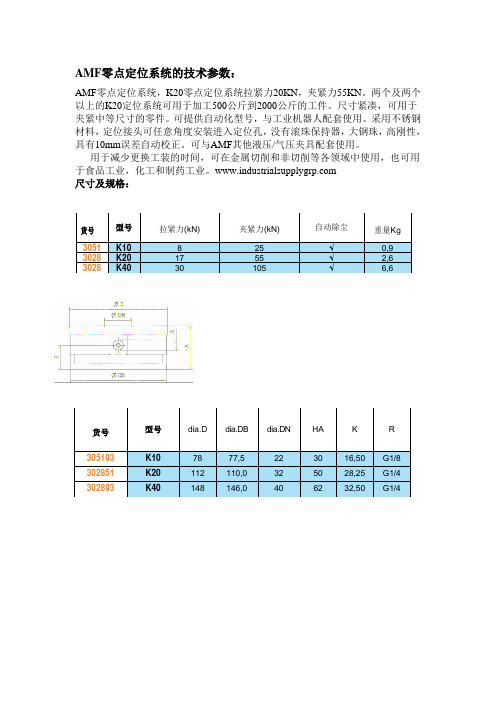
AMF 零点定位系统,K20零点定位系统拉紧力20KN ,夹紧力55KN 。
两个及两个以上的K20定位系统可用于加工500公斤到2000公斤的工件。
尺寸紧凑,可用于夹紧中等尺寸的零件。
可提供自动化型号,与工业机器人配套使用。
采用不锈钢材料,定位接头可任意角度安装进入定位孔,没有滚珠保持器,大钢珠,高刚性,具有10mm 误差自动校正。
可与AMF 其他液压/气压夹具配套使用。
用于减少更换工装的时间,可在金属切削和非切削等各领域中使用,也可用于食品工业,化工和制药工业。
尺寸及规格:
货号 型号 拉紧力(kN)
夹紧力(kN)
自动除尘
重量Kg 3051K10 8 25 √ 0,9 3028K20 17 55 √ 2,6 3028
K40
30
105
√
6,6
货号
型号 dia.D dia.DB dia.DN HA K R
305193 K10 78 77,5 22 30 16,50 G1/8 302851 K20 112 110,0 32 50 28,25 G1/4 302893
K40
148
146,0
40
62
32,50
G1/4
工件
定位和夹紧
夹具托盘
通过零点定位系
统定位和夹紧
零点定位单元
机床工作台。
零点定位系统应用报告
应用领域报告作者:青岛英世齐商贸有限公司对于夹具,最重要的是什么?夹持精度,夹持力,更换夹具的方便......这些是我们选择制作夹具时首先考虑到问题。
机床的操作工人大量的时间用来做什么?更换夹具(工件),重新定位。
为什么工人不喜欢小批量生产?因为更换夹具和重新设定机床非常麻烦。
有时候花费很长的时间。
如果做几件就要重新设定,真是一件让人烦躁的事情。
工人更换工装夹具时机床在做什么?大部分时间是无效空转的。
对于昂贵的机床,这确实是个问题。
我们非常希望能提高机床的使用效率而不是买更多的机床,我们必须为保持竞争力而降低成本。
中国的劳动力成本在持续上升,工厂因为薪金支出的增长而不得不涨价,除了购买更高档的机床,有没有代价比较低的降低成本的方法?机床的更新换代是大趋势,加工中心越来越多地替代传统机床。
那么原来的状况良好的传统机床都淘汰掉吗?有没有办法将传统机床简单改造就能与加工中心配合使用,而效率仍然很高呢?以上问题在欧洲有了革命性的解决方案:AMF零点定位系统。
AMF零点定位系统操做如此简单,只要托盘或者工件上的接头大致对上定位器,接头就会自动找到路径和中心并滑入定位器!小工件如此,大工件也几秒钟搞定!使用零点定位系统后,甚至可以节省90%的换装时间。
并且,工件更换到夹具上是离线操作的,机床几乎没有空转的时间,机床的使用效率被大大提高了。
对于小批量多品种的生产,效益就更为明显。
AMF零点定位系统的重复定位精度是0.005mm,定位精度非常高;而且AMF零点定位系统能够很好地减振,使得加工精度更高,一致性更好。
因为加工精度高,后续的某些工序甚至可以省略。
独有的自清洁系统使得精度一直有保障,且免维护。
减振作用的另一个收获是:使用AMF零点定位系统后刀具的使用寿命突然延长了,这是降低成本的一个重要因素。
AMF零点定位系统有与众不同的特性:产品规格全,夹持力大。
从K02到K40,我们适合从轻型到重型所有的需求。
K02和K5的尺寸很小,但也有6kN和13kN的夹持力;K10夹持力达到25kN已经能满足一般机械加工的要求;K20和K40夹持力分别可达55kN和105kN,这是我们独有的适宜重型切削的产品,是重型切削领域不二的选择。
上海安钧AMF型电磁流量计技术描述

上海安钧AMF 型电磁流量计技术描述一、AMF 型电磁流量计工作原理电磁流量计的工作原理基于法拉第电磁感应定律。
当一个导体在磁场内运动,在与磁场方向、运动方向相互垂直方向的导体两端,会有感应电动势产生。
电动势的大小与导体运动速度和磁感应强度大小成正比。
在图1-1中,当导电流体以平均流速V (s m /),通过装有一对测量电极的一根内径为D (m )的绝缘管子流动时,并且该管子处于一个均匀的磁感应强度为B (T )的磁场中。
那么,在一对电极上就会感应出垂直于磁场和流动方向的电动势(E )。
由电磁感应定律,可写做(1)式: V D kB E ⋅⋅=(V ) ………………(1) 式中k 是比例系数。
通常,体积流量可以写作V Dq4π=(s m /) (2)由公式(1)和(2)可得到:)(43s m BE k D q v π= (3)因此电动势可表示为:)(q 4v V D kBE π=………………………(4) 当B 是个常数时,公式(3)中A Bk D =14π,公式(3)改写为: )/(3s m AE q v =可见,流量q 与电动势E 成正比。
U图1.1 电磁流量计工作原理图1-2 转换器电路结构产品用途与适用范围1.1 特点:■可编程频率低频矩形波励磁,提高了流量测量的稳定性,功率损耗低;■采用新型含有FLASH存贮器的16位超低功耗微处理器,集成度高,运算速度快,计算精度高。
■全数字量处理,抗干扰能力强,测量可靠;■超低EMI开关电源,适用电源电压变化范围大,效率高,温升小。
抗EMC性能好;■中英文菜单操作,使用方便,操作简单,易学易懂;■高清晰度背光、宽温型LCD显示;■能进行双向流量测量、双向总量累计。
具有量程自动切换功能,更有效地提高了模拟电流和频率输出的测量精度,特别适用于昼夜流量范围变化大并需要发出控制信号的场合。
流量测量范围度可达50 : 1。
■内部有三个积算器,分别显示正向累计量、反向累计量及累计差值积算量,方便于流体计量和贸易交接。
GSM GPRS GPS定位追踪器 说明书
GSM/GPRS/GPS定位追踪器使用手册序言.非常感谢您购买我们的GPS定位跟踪器。
使用手册将详细的说明如何操作本产品。
因此务必请您在使用产品前认真的阅读本份使用手册。
如有更改,恕不另行通知。
每次更改将统一在最新的一次产品销售中发布。
生产商对于使用手册其中的过失和疏漏不承担法律责任。
目录1简介----------------------------------------------------------------------------------3 2应用领域----------------------------------------------------------------------------------3 3硬件3.1前面----------------------------------------------------------------------------------------33.2后面-----------------------------------------------------------------------------------------33.3侧面---------------------------------------------------------------------------------------33.4底面-----------------------------------------------------------------------------------------43.5内部----------------------------------------------------------------------------------------4 4规格描述-------------------------------------------------------------------------------------4 5使用说明5.1SIM卡的放置--------------------------------------------------------------------------------55.2电池和充电器------------------------------------------------------------------------------55.3设备启动------------------------------------------------------------------------------------65.4初始化设置----------------------------------------------------------------------------65.5设置密码-------------------------------------------------------------------------------------65.6授权设置------------------------------------------------------------------------------------75.7单次定位-------------------------------------------------------------------------------------75.8自动连续定位-------------------------------------------------------------------------------75.9监听----------------------------------------------------------------------------------------7监听模式””的转换----------------------------------------------75.10“定位模式定位模式””和“监听模式5.11电子栅栏--------------------------------------------------------------------------------85.12移位报警------------------------------------------------------------------------------85.13超速报警---------------------------------------------------------------------------------85.14IMEI码查询---------------------------------------------------------------------------95.15紧急报警--------------------------------------------------------------------------------95.16底电报警------------------------------------------------------------------------------95.17隐藏号码定位-------------------------------------------------------------------------95.18设置平台短信中心号--------------------------------------------------------------------95.19GPRS的设置---------------------------------------------------------------------------9 6警告注意------------------------------------------------------------------------11 7故障处理方法-----------------------------------------------------------------------111简介本产品基于GSM/GPS 网络和GPS 卫星定位系统,通过短信息或互联系对远程目标进行定位或监控.。
AMF25中文说明书(全)
按钮和LEDs----------------------------------------------------------------------------------50
显示菜单------------------------------------------------------------------------------------51
怎么看测量的数据?--------------------------------------------------------------------------51
包里有什么?-------------------------------------------------------------------------------6
IL-RA15遥控信号器--------------------------------------------------------------------------6
发电机保护------- -------------------------------------------------------------------------37市电故障-----------------------------------------------------------------------------------39
模拟输入-----------------------------------------------------------------------------------29
liise品牌发电机控制器amf 中文说明书
IL-NT-AMF20/25 中文说明书目录:目录 (2)一般准则 (5)本手册介绍了什么? (5)!!警告!! (5)标志符号 (5)文本 (6)一般说明 (7)控制系统的说明(以及所有的附件) (7)包装里面有什么? (7)IL-NT RS232 通讯插卡.......... .. (7)IL-NT RS232-485 通讯插卡. .............................................................................................................................................. ..11 IL-NT S-USB USB 通讯服务插卡 (11)IB-Lite 以太网通讯插卡. (12)IL-NT AOUT8 测量仪表驱动模块 (13)IL-NT BIO8 交替二进制输入/输出模块 (15)IL-NT RD 远程显示软件 (16)IGL – RA15远程信号器 (16)IG-IOM/PTM 模块 (17)IG-IB网桥 (18)IL-NT 终端.... . (18)IL-NT 端子和面板......... (18)安装 (20)控制器安装 (19)推荐使用的线路图.. (21)AMF 线路图 (21)软件应用支持 (22)电流接触器(设置点MCB逻辑=“通-关”) (22)ATS两个状态位置(设置点MCB逻辑=“通-合”) (21)ATS三个状态位置(设置点MCB逻辑=“通-断”) (22)准备工作的开始 (24)如何安装 (24)电流测量 (27)电压测量和发电机连接类型 (28)模拟量输入 (31)RS485 连接 (37)扩展模块(CAN 总线)连接 (39)输入和输出 (40)IL-NT二进制输入—默认 (40)二进制输入—列表 (40)二进制输出—列表 (43)模拟量输入 (54)模拟量输出 (54)设定点................................................................................................................................................................................. . (55)密码 (55)基本设定 (56)发动机参数 (61)发动机保护 (66)发电机保护 (69)AMF 设定 (73)日期/时间 (78)传感器规格 (80)*扩展I/O (80)短信/邮件 (81)*ECU---控制引擎支持 (83)确定ECU 配置 (84)从ECU 读参数 (84)从ECU 读出的配置信息 (85)模拟量输入 (85)连接说明 (85)传感器说明 (88)传感器校正 (88)传感器默认曲线 (88)功能描述 (89)“关”模式 (89)“手动”模式 (89)“自动”模式 (90)测试模式 (91)断路器计时 (92)报警管理 (94)传感器故障(FLS) (94)警告(WRN) (94)停机(SD) (94)市电失败 (MF) (94)电压相序监测 (95)发电机组工作状态 (98)报警一览表 (99)历史文档 (100)初始化屏幕 (101)顾客标准显示 (101)软件版本显示 (101)语言屏幕 (102)用户界面屏幕 (102)远程控制和数据记录 (102)直接连接到电脑 (102)电脑软件—LiteEdit (104)Modbus 协议 (104)远程通讯 (111)互联网连接 (111)推荐ISDN调制解调器 (111)推荐GSM调制解调器 (111)手机SIM卡设置 (111)IL-NT-RD远程监控软件 (112)一般说明 (112)警告............................................................................................................................................................................... .. (112)IL-NT-RD软件安装..................................................................................................................................................... (112)IL-NT-RD数据线............................................................................................................................................................ (113)功能描述 (116)Sw兼容性 (116)维护保养 (117)备用电池更换 (117)详细的技术参数 (119)输入/输出概述 (119)发电机保护 (119)语言支持 (120)电源 (120)*低温型 (120)技术数据 (121)尺寸规格和重量 (121)发电机 (122)二进制输入和输出 (122)模拟量输入 (122)速度传感器输入 (122)D+端子 (123)*CAN总线接口 (123)IL-NT RS232接口(可选择卡) (123)IL-NT RS232-485接口(可选择卡) (124)IL-NT S-USB接口(可选择卡) (124)IL-NT AOUT8接口(可选择卡) (124)IL-NT BIO8接口(可选择卡) (124)IGS-PTM (125)IGL-RA15 (125)IG-IB (126)一般准则本手册介绍了什么?重要安全说明保存此命令-----在安装过程中应遵循包含本手册IL -Nt系列控制器的重要操作指南和lnteli 发电机组控制器。
AMF零点定位系统产品说明书
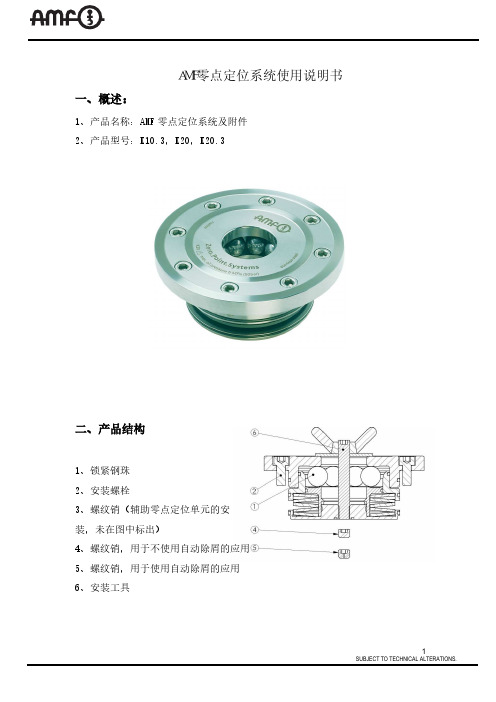
一、概述:1、产品名称:AMF 零点定位系统及附件2、产品型号:K10.3,K20,K20.3二、产品结构1、锁紧钢珠2、安装螺栓3、螺纹销(辅助零点定位单元的安装,未在图中标出)4、螺纹销,用于不使用自动除屑的应用5、螺纹销,用于使用自动除屑的应用6、安装工具AMF零点定位系统使用说明书三、产品安装及使用(一)零点定位接头凹头的安装不要讲安装工具⑥去掉去掉保护橡胶圈清洁安装孔,及安装表面,并涂入润滑脂,将零点定位单元凹头装为安装孔,并安装平旋紧安装螺栓旋紧螺栓时使用扭矩扳手,M6,扭矩8Nm拆卸安装工具⑥将螺纹销④或⑤旋入零点定位接头凹头内孔底部的螺纹孔,并用适合于不锈钢的胶粘结。
(二)零点定位接头凸头的安装1、需要更换的夹具托盘2、紧固螺栓3、零点定位接头凸头4、扭矩扳手K20M12扭矩120Nm 零点定位接头凸头(1)单向定位接头凸头(2)紧固定位接头凸头(3)K10M834Nm扭矩䴬⛯ᇐփ䬶Ⲻᑮ⭞࠼ᐹ䘉⿽ᇊս䬰࠶ᐳ䘲⭘Ҿа㡜⭏ӗ⧟ຳDŽ䴦⛩ᇊս䬰䎧ࡠ䲀ࡦ;ˈ<ᯩੁ㠚⭡ᓖⲴ⭘ˈᡀѪ৲㘳ส⛩˗অੁᇊս䬰ਚ䲀ࡦ䖜ᯩੁⲴ㠚⭡ᓖˈ㘼㍗പᇊս䬰ਚ䎧ࡠ໎࣐ཀྵ㍗࣋Ⲵ⭘ˈ䘉ṧਟԕ؍䇱ᮤњᢈⴈⲴᆼޘᇊսˈ䚯ݽ䗷ᇊսDŽঅੁᇊս䬰䴦⛩ᇊս䬰㍗പᇊս䬰3312123ᇐփ䬶ᆿ㻻ᆊⲺࣖᐛተሮተሮDia.D1Dia.M S1S2K027,17M 53,614K510,00M 62,512K1015,00M 83,516K2025,00M125,523K4025,00M165,530ഴ⽰മѝᱮ⽪Ⲵᱟᇊս䬰઼㍗പ㷪ṃDŽ注意:单向定位接头的两个凸点连线需要垂直于零点定位接头和单向定位接头的连线方向。
公差要求:A=零点定位接头凸头到单向定位接头凸头的距离+/-0.01mmB=零点定位接头凸头到紧固定位接头凸头的距离+/-0.03mm1、使用的压缩空气必须无水,并进行油雾润滑,润滑标准(~2-5ml/m³),使用DIN51524-2VG 32润滑油或相近的润滑油;2、适当的维护有助于保证零点定位系统的长期使用。
应用AMF零点定位器工装结构改进
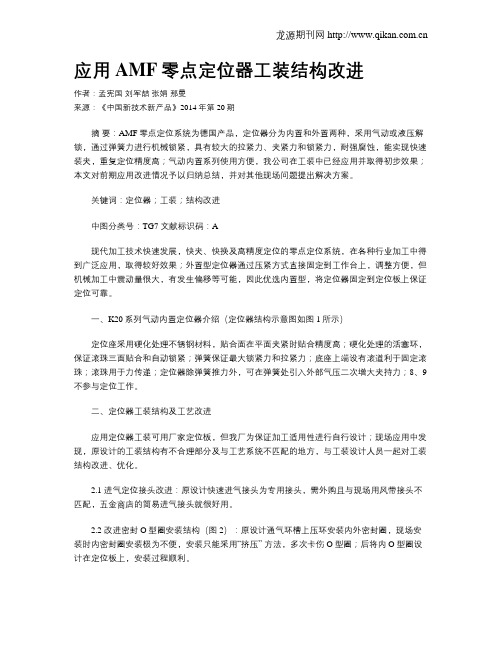
应用AMF零点定位器工装结构改进作者:孟宪国刘军喆张娟那曼来源:《中国新技术新产品》2014年第20期摘要:AMF零点定位系统为德国产品,定位器分为内置和外置两种,采用气动或液压解锁,通过弹簧力进行机械锁紧,具有较大的拉紧力、夹紧力和锁紧力,耐强腐蚀,能实现快速装夹,重复定位精度高;气动内置系列使用方便,我公司在工装中已经应用并取得初步效果;本文对前期应用改进情况予以归纳总结,并对其他现场问题提出解决方案。
关键词:定位器;工装;结构改进中图分类号:TG7 文献标识码:A现代加工技术快速发展,快夹、快换及高精度定位的零点定位系统,在各种行业加工中得到广泛应用,取得较好效果;外置型定位器通过压紧方式直接固定到工作台上,调整方便,但机械加工中震动量很大,有发生偏移等可能,因此优选内置型,将定位器固定到定位板上保证定位可靠。
一、K20系列气动内置定位器介绍(定位器结构示意图如图1所示)定位座采用硬化处理不锈钢材料,贴合面在平面夹紧时贴合精度高;硬化处理的活塞环,保证滚珠三面贴合和自动锁紧;弹簧保证最大锁紧力和拉紧力;底座上端设有滚道利于固定滚珠;滚珠用于力传递;定位器除弹簧推力外,可在弹簧处引入外部气压二次增大夹持力;8、9不参与定位工作。
二、定位器工装结构及工艺改进应用定位器工装可用厂家定位板,但我厂为保证加工适用性进行自行设计;现场应用中发现,原设计的工装结构有不合理部分及与工艺系统不匹配的地方,与工装设计人员一起对工装结构改进、优化。
2.1 进气定位接头改进:原设计快速进气接头为专用接头,需外购且与现场用风带接头不匹配,五金商店的简易进气接头就很好用。
2.2 改进密封O型圈安装结构(图2):原设计通气环槽上压环安装内外密封圈,现场安装时内密封圈安装极为不便,安装只能采用“挤压” 方法,多次卡伤O型圈;后将内O型圈设计在定位板上,安装过程顺利。
2.3 安装孔结构改进:原设计安装孔为盲孔,直径和深度都有尺寸公差,镗加工不易保证技术要求;将盲孔改成通孔,镗加工保证直径公差会容易很多,下面增加一堵盖,深度尺寸公差通过配磨堵盖上端面保证;该方案亦解决了定位器安装后,在底面形成密闭空腔导致定位器无法拆下问题。
定位系统说明书

监狱智能化定位系统使用说明书河北沃尔思科技有限公司2013-2-27目录第一章软件功能介绍 (1)第二章软件操作流程 (2)第三章登录与主界面 (3)3.1、登陆 (3)3.2、主界面 (4)第四章功能详细使用介绍 (4)4.1、单位区域维护 (4)4.2、基站管理 (6)4.3、人员管理 (7)4.4、人员设置 (8)4.5、事件管理 (9)4.6、用户管理 (10)4.7、系统设置 (10)4.8、出入记录 (11)4.9、人员定位查询 (11)4.10、在线点名 (12)第五章系统配置文件管理 (13)第一章软件功能介绍系统分为三个子系统:1)智能化定位系统—采集端:为接收数据系统,后台运行,无操作界面。
2)智能化定位系统—服务器:仅放在管理中心,由管理员登陆。
可进行基础数据维护,并显示所有楼层定位信息。
3)智能化定位系统—客户端:放在客户端,由一般用户登陆,显示当前楼层的定位信息。
监狱智能化定位系统—服务器的主要功能包括:基本信息配置(字典表管理,基站管理,用户管理),区域管理(楼层信息,区域信息),档案管理(标签管理,档案管理),查询历史记录,实时定位,定位回放,特殊事件管理,报警功能。
基本信息配置,区域管理,档案管理是进行定位的前提。
报警功能范围:a)禁区进出报警:标签(人员),不能进/出限制区域,否则触发报警。
实现办法:在标签信息界面,给标签分配活动楼层,设定禁止进\出区域(此区域是活动楼层内区域)。
b)超出活动楼层报警:一般在每层楼的楼梯处放置一个读卡器(激活器),用来标识楼层,标签(人员)超出活动楼层,触发报警。
实现办法:在基站管理界面中,将此读卡器的类型设置为【通道读卡器】,楼层设为当前楼层;在标签信息界面,给标签分配活动楼层。
c)门禁报警:一般在整个大楼门口,放置两个读卡器(激活器),一个作为为内,一个作为为外。
当人员从内→外时触发报警,从外→内正常进入。
实现办法:在基站管理界面中,将内侧读卡器类型设置为【门禁读卡器】,标识设为【内】,将外侧读卡器类型设置为【门禁读卡器】,标识设为【外】。
E+H MicroPilot HART M FMR240 雷达物位计简明操作指南

3.1 在 F12/F23 外壳中接线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 3.2 在 T12 外壳中接线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.3 接线端子分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.4 连接测量单元 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 3.5 屏蔽 / 电势平衡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.6 防护等级 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.7 连接后检查 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
AMF造型机操作指导

AMF造型机操作指导一概述本操作指导面对的是本公司的造型设备的操作人员。
二造型机操作1、显示器件的功能该显示板安装于控制柜上,共有22个指示灯。
灯下方的数字序号对应于操作说明中的序号。
中间位置一行排列13个指示灯,其上方的标签为单元设备名称,下方标签为压ACT-Ⅰ、ACT-Ⅱ按钮时该单元设备执行的动作。
通常情况下,执行(压ACT-Ⅱ)第二行所标示的动作为设备向原位方向运行。
1 中间13个指示灯不同时期、不同发光所代表的意义(1)检查各个单元设备的原位状态:压下原位检查按钮时,已在原位的单元设备其指示灯常亮,不在原位的单元设备其指示灯以一秒的速率闪亮。
(2)选择设备:压下单元选泽(左)或(右)按钮时,即进入单元设备选择状态。
此时指示灯随压钮次数逐个左移(右移)发光,当移动到想要操作的单元设备时,停止压钮。
发光的指示灯既代表选定了该单元设备。
此时压ACT-Ⅰ(ACT-Ⅱ)按钮,发光指示灯代表的单元设备执行相应的动作。
(3)设备运行状态:设备运行过程中指示灯以1秒速率闪亮。
设备运行到位后指示灯常亮。
(4)故障报警:设备运行过程中发生故障,指示灯以0.2秒速率闪亮。
2 其它指示灯发光所代表的意义(1)工程迟延:该灯发光时说明造型机需要推出砂型,但此时辅线尚未发出允许造型机推出砂型的指令。
此时需检查辅线延误周期的原因。
(2)脱模:该灯发光时说明造型机运行在脱模过程,发生故障后以0.2秒速率闪亮。
根据现场情况查找故障点。
(3)手操作中:该灯发光时说明造型机选择了下芯操作,在操作完毕后需压“下芯完了”按钮确认,造型机方可继续运行。
(4)SQ:该灯发光时说明造型机运行在压实过程,发生故障后以0.2秒速率闪亮。
根据现场情况查找故障点。
(5)给砂送风:该灯发光时说明造型机运行在射砂过程。
发生故障后以0.2秒速率闪亮。
它代表的意义是,造型机在循环开始时检测到砂库料位计砂满信号,但运行到需要射砂时,该信号丢失。
处理方法:a)钥匙开关切换到手动状态。
PMV D3定位器使用入门
PMV D3数字阀门定位器使用手册1. 简介PMV D3是一种数字式阀门定位器,主要用于阀门调节。
单作用、双作用执行器上均可安装,也适用于直行程和角行程两种型式。
它还可以选装反馈、限位开关、压力表等部件。
这些部件是在发货之前就装配好的,交货后也可定制。
反馈和限位开关部件包括4-20mA反馈和下列三者之一——双机械触点、双簧片开关、双电感式传感器(DIN 19234)。
安全使用的特殊设计PMV D3I(本安型)的封装由铝组成,应避免应用中发生外界物体对其的任何碰撞或摩擦。
2. 存储(略)3.设计PMV D3定位器包括:·电路板,附有微处理器、HART模块、Profibus、Foundation Fieldbus(基金会现场总线)、显示,等等;·阀块;·带电位差计的位置反馈;·电气连接的密封隔离。
按钮和显示屏位于铝盖下方,由O型环密封。
下图为移去盖子后的PMV D3。
4. 不同型号的PMV D3PMV D3通用型PMV D3数字定位器极易使用,它含有五个按钮的用户接口和LCD显示屏。
通信方式有4-20mAHART、基金会现场总线和Profibus PA。
全部PMV D3定位均能可含有反馈、Fail Freeze(失效保护,当掉电时保持失效前的阀位)、270度旋转(对于外部行程)和压力计。
PMV D3 防爆型PMV D3数字定位器还可加上防爆外壳。
防爆型具备所有通用型的性能特点,也含有五个按钮的用户接口和LCD显示屏,也可以通过HART、基金会现场总线和Profibus进行通信。
但是防爆型增加了压力计接口和就地图形化LCD显示器。
ATEX:EEx d ⅡB + h2T6(Ta+65℃),T5(Ta+80℃) Ⅱ 2GDPMV D3 本安型易爆炸危险场所可使用本安型PMV D3数字定位器。
本安型具备前两种型号定位器的所有性能特点。
ATEX:EEx ia ⅡC T4 Ta=-30……80℃Ⅱ 1GDCSA, FM Class I Div.1 Grps B, C, D, Class ⅡDiv.1 Grps E, F, G, T6, T5.PMV D3 遥控安装该型适合安装于一些特殊应用场合,如振动、高(或低)温腐蚀环境、难以接近或进入场合等。
法纳克O系统操作编程说明书

第一篇:编程61.综述6 1.1可编程功能6 1.2准备功能61.3辅助功能82.插补功能9 2.1快速定位(G00)9 2.2直线插补(G01)102.3圆弧插补(G02/G03)113.进给功能12 3.1进给速度12 3.2自动加减速控制13 3.3切削方式(G64)13 3.4精确停止(G09)及精确停止方式(G61) 133.5暂停(G04) 134.参考点和坐标系14 4.1机床坐标系14 4.2关于参考点的指令(G27、G28、G29及G30) 14 4.2.1 自动返回参考点(G28)14 4.2.2 从参考点自动返回(G29)15 4.2.3 参考点返回检查(G27)15 4.2.4 返回第二参考点(G30)15 4.3工件坐标系17 4.3.1 选用机床坐标系(G53)17 4.3.2 使用预置的工件坐标系(G54~G59)17 4.3.3 可编程工件坐标系(G92)18 4.3.4 局部坐标系(G52) 194.4平面选择195.坐标值和尺寸单位205.1绝对值和增量值编程(G90和G91)206.辅助功能20 6.1M代码20 6.1.1 程序控制用M代码206.1.2 其它M代码21 6.2T代码21 6.3主轴转速指令(S代码) 226.4刚性攻丝指令(M29)227.程序结构22 7.1程序结构22 7.1.1 纸带程序起始符(Tape Start) 22 7.1.2 前导(Leader Section) 22 7.1.3 程序起始符(Program Start) 23 7.1.4 程序正文(Program Section) 23 7.1.5 注释(Comment Section) 23 7.1.6 程序结束符(Program End) 23 7.1.7 纸带程序结束符(Tape End) 23 7.2程序正文结构23 7.2.1 地址和词23 7.2.2 程序段结构247.2.3 主程序和子程序258.简化编程功能27 8.1孔加工固定循环(G73,G74,G76,G80~G89) 27 8.1.1 G73(高速深孔钻削循环)31 8.1.2 G74(左螺纹攻丝循环)32 8.1.3 G76(精镗循环) 33 8.1.4 G80(取消固定循环) 34 8.1.5 G81(钻削循环) 34 8.1.6 G82(钻削循环,粗镗削循环) 35 8.1.7 G83(深孔钻削循环) 35 8.1.8 G84(攻丝循环) 36 8.1.9 G85(镗削循环) 37 8.1.10 G86(镗削循环) 37 8.1.11 G87(反镗削循环) 37 8.1.12 G88(镗削循环) 38 8.1.13 G89(镗削循环) 38 8.1.14 刚性攻丝方式398.1.15 使用孔加工固定循环的注意事项409.刀具补偿功能419.1刀具长度补偿(G43,G44,G49) 41 9.2刀具半径补偿41 9.2.1 补偿向量41 9.2.2 补偿值42 9.2.3 平面选择42 9.2.4 G40、G41和G42 42 9.2.5 使用刀具半径补偿的注意事项42第二篇:NC操作431.自动执行程序的操作43 1.1CRT/MDI操作面板43 1.1.1 软件键43 1.1.2 系统操作键43 1.1.3 数据输入键43 1.1.4 光标移动键43 1.1.5 编辑键和输入键44 1.1.6 NC功能键44 1.1.6 电源开关按钮44 1.2MDI方式下执行可编程指令44 1.3自动运行方式下执行加工程序44 1.3.1 启动运行程序441.3.2 停止运行程序452.程序验证和安全功能45 2.1程序验证功能45 2.1.1 机床闭锁45 2.1.2 Z轴闭锁45 2.1.3 自动进给的倍率45 2.1.4 快速进给的倍率45 2.1.5 试运行46 2.1.6 单程序段运行46 2.2安全功能46 2.2.1 紧急停止462.2.2 超程检查463.零件程序的输入、编辑和存储463.1新程序的注册46 3.2搜索并调出程序47 3.3插入一段程序47 3.4删除一段程序47 3.5修改一个词483.6搜索一个词484.数据的显示和设定49 4.1刀具偏置值的显示和输入49 4.2G54~G59工件坐标系的显示和输入49 4.3NC参数的显示和设定494.4刀具表的修改505.显示功能51 5.1程序显示515.2当前位置显示516.在线加工功能51 6.1有关参数的修改:516.2有关在线加工的操作. 527.机床参数的输入﹑输出528.用户宏B功能568.1变量56 8.1.1变量概述56 8.1.2系统变量57 8.2算术和逻辑操作63 8.3分支和循环语句65 8.3.1无条件分支(GOTO语句)65 8.3.2条件分支(IF语句)65 8.3.3循环(WHILE语句) 66 8.3.4注意67 8.4宏调用67 8.4.1简单调用(G65)67 8.4.2、模调用(G66、G67)69 8.4.3G码调用宏70 8.4.4、M码调用宏718.4.5M码调用子程序71 8.4.6T码调用子程序72 8.5附加说明72附录1:报警代码表731.程序报警(P/S报警) 732.伺服报警753.超程报警764.过热报警及系统报警76第一篇:编程1. 综述1.1 可编程功能通过编程并运行这些程序而使数控机床能够实现的功能我们称之为可编程功能。
双差分GPS北斗定位系统使用说明书140730概要

文档类别文档编号起草日期2014-07-30 密级无入库日期入库定位信息服务器/研发管理郑州市加滋杰交通科技股份有限公司GPS/北斗定位系统使用说明书版本:V1.1起草:李光审核:校对:批准:版权所有:加滋杰交通科技股份有限公司2014年07月30日修订记录序号版本说明责任人职责姓名日期1 V1.0 初始版本起草李光2014.03.19 校对审核批准2 V1.1起草李光2014.07.30校对审核批准3 起草校对审核批准4 起草校对审核批准5 起草校对审核批准6 起草校对审核批准7 起草校对审核批准目录目录 (3)双差分GPS/北斗定位系统使用说明书 (4)一、概述 (4)1.1系统特点 (4)1.2系统配置 (4)1.3技术指标 (4)二、软硬件说明及安装 (5)2.1硬件说明 (5)2.2 软件说明 (8)2.3 设备安装 (8)三、数据协议及命令 (11)3.1 GPS定位定向消息集 (11)3.2 命令协议 (13)四、注意事项 (16)五、运输与储存 (16)六、机械规格 (16)双差分GPS/北斗定位系统使用说明书一、概述GPS/北斗卫星定位系统具有全天候、高精度、自动化、高效益等特点,本系统内置双GNSS与里程计接口,GNSS系统支持北斗、GPS双系统;系统可采用双差分RTK算法,组合输出系统方位角,输出精度可达厘米级,更适用于交通测量、测绘、GIS采集、驾校考试系统等高精度高要求场合使用。
1.1系统特点◆精度高、无累积误差、兼容多种组合模式、保持时间长;◆双GPS利用载波测量技术精确计算航向值,航向精度视两GPS间基线长度而定,基线越长精度越高;◆动态使用时,还有GPS轨迹角输出,尤其能为有人机、无人机、浮空器等准确提供偏流角;◆具备自寻北功能,在无GPS信号情况下仍可通过高精度惯导实现定向测姿。
1.2系统配置表1 系统配置主机1台GNSS测量天线2个天线馈线2根数据电源线缆1套(3根)合格证1张1.3技术指标表2 主要技术指标系统精度航向0.2°(1σ,GNSS信号良好,基线长度≥2m)姿态1° (1σ,GNSS信号良好)位置差分:2cm+1ppm (CEP)(GNSS信号良好)单点:2m(CEP)(GNSS信号良好)数据更新速率1Hz/5Hz(可调)接口特性接口方式RS-232波特率115200 bps(默认)物理特性供电电压12VDC额定(10.8~18VDC)额定功率<15W工作温度-25℃~+60℃物理尺寸189*153*73.5(mm)重量≤1Kg(不含天线和馈线)二、软硬件说明及安装2.1硬件说明2.1.1 GNSS天线GNSS天线采用零相位测量型天线,可以接收多个导航定位卫星星座,并满足高精度载波相位测量要求。
希普瑞夫 SMD GPS 模块 GPS03 产品说明书

Featuresz65 channel engine for highperformance acquisitionz GPS L1 C/A Codez Perform 8 million time-frequency hypothesis testing per secondz Open sky hot start 2 secz Open sky cold start 33 secz Signal detection better than –160dBm z Reacquisition sensitivity –156dBmz Accuracy 5m CEPz Tracking current < 50mAz Support active antennaz Small size 27.9 x 20.0 x 3.2 mm (LxWxH) GPS03Low Cost Very High PerformanceSMD GPS ModuleThe GPS03 is a small form factor GPS module solution intended for a broad range of Original Equipment Manufacturer (OEM) products, where fast and easy system integration and minimal development risk is required.The GPS03 GPS receiver’s -160dBm tracking sensitivity allows continuous position coverage in nearly all application environments. Its high performance search engine is capable of testing 8,000,000 time-frequency hypotheses per second, offering industry-leading signal acquisition and TTFF speed. The receiver is optimized for applications requiring high performance, low power, and low cost; suitable for a wide range of OEM configurations including mobile phone, PND, asset tracking, and vehicle navigation products.The very small 27.9mm x 20mm form factor and the SMT pads allow standard surface mount device pick-and-place process in fully automated assembly process; enabling high-volume, very cost-efficient production.TECHNICAL SPECIFICATIONSReceiver Type 65 parallel channel, L1 C/A codeCEP5mPositionAccuracyVelocity 0.1m/sec+/-1us1PPSTimingStartup Time 2 second hot start under open sky33 second cold start under open sky (average) Reacquisition2s-145dBmacquisitionSensitivitytracking-160dBmRate 1HzUpdate(39.2m/sec2)4GDynamicsOperational Limits Altitude < 18,000m or velocity < 515m/s(COCOM limit, either may be exceeded but not both) Serial Interface 3.3V LVTTL levelV3.01NMEA-0183ProtocolGPRMC,GPVTG*2GPGSV,GPGLL,GPGGA,GPGSA,8,1rate,N,9600DefaultbaudWGS-84Datum DefaultdefinableUserDC+/-5%Voltage 3.3VInputacquisitionCurrent ~70mAInputtracking~50mADimension 27.9mm L x 20mm W x 3.2mm HWeight: 3gOperating Temperature -40o C ~ +85o CStorage Temperature -55 ~ +100o C95%~Humidity5%BLOCK DIAGRAMRXD0TXD0GPIO03.3VV_Bat RFINModule block schematicANTENNAThe GPS03 module is designed to work active antenna. Recommended active antenna should have gain of 20 ~ 30dB and noise figure less than 1.2dB.PIN AssignmentPIN DescriptionV_BatGPIO0TXD0RXD0RECOMMENDED PCB FOOTPRINTPINOUT DESCRIPTIONV_BatGPIORXD0TXD0NMEA MessagesThe serial interface protocol is based on the National Marine Electronics Association’s NMEA 0183 ASCII interface specification. This standard is fully define in “NMEA 0183, Version 3.01” The standard may be obtained from NMEA, GGA - Global Positioning System Fix DataTime, position and fix related data for a GPS receiver.Structure:$GPGGA,hhmmss.sss,ddmm.mmmm,a,dddmm.mmmm,a,x,xx,x.x,x.x,M,,,,xxxx*hh<CR><LF>1 2 3 4 5 6 7 8 9 10 11Example:$GPGGA,111636.932,2447.0949,N,12100.5223,E,1,11,0.8,118.2,M,,,,0000*02<CR><LF>Field Name Example Description1 UTC Time 111636.932 UTC of position in hhmmss.sss format, (000000.000 ~235959.999)2 Latitude 2447.0949 Latitude in ddmm.mmmm formatLeading zeros transmitted3 N/S Indicator N Latitude hemisphere indicator, ‘N’ = North, ‘S’ = South4 Longitude 12100.5223 Longitude in dddmm.mmmm formatLeading zeros transmitted5 E/W Indicator E Longitude hemisphere indicator, 'E' = East, 'W' = West6 GPSqualityindicator 1 GPS quality indicator0: position fix unavailable1: valid position fix, SPS mode2: valid position fix, differential GPS mode3: GPS PPS Mode, fix valid4: Real Time Kinematic. System used in RTK mode withfixed integers5: Float RTK. Satellite system used in RTK mode. Floatingintegers6: Estimated (dead reckoning) Mode7: Manual Input Mode8: Simulator Mode7 Satellites Used 11 Number of satellites in use, (00 ~ 12)8 HDOP 0.8 Horizontaldilutionof precision, (00.0 ~ 99.9)9 Altitude 108.2 mean sea level (geoid), (-9999.9 ~ 17999.9)10 DGPS Station ID 0000 Differential reference station ID, 0000 ~ 1023NULL when DGPS not used11 Checksum 02Note: The checksum field starts with a ‘*’ and consists of 2 characters representing a hex number. The checksum is the exclusive OR of all characters between ‘$’ and ‘*’.GLL – Latitude/LongitudeLatitude and longitude of current position, time, and status.Structure:$GPGLL,ddmm.mmmm,a,dddmm.mmmm,a,hhmmss.sss,A,a*hh<CR><LF>1 2 3 4 5 6 7 8Example:$GPGLL,2447.0944,N,12100.5213,E,112609.932,A,A*57<CR><LF>Field Name Example Description1 Latitude 2447.0944 Latitude in ddmm.mmmm formatLeading zeros transmitted2 N/S Indicator N Latitude hemisphere indicator‘N’ = North‘S’ = South3 Longitude 12100.5213 Longitude in dddmm.mmmm formatLeading zeros transmitted4 E/W Indicator E Longitude hemisphere indicator'E' = East'W' = West5 UTC Time 112609.932 UTC time in hhmmss.sss format (000000.000 ~235959.999)6 Status A Status, ‘A’ = Data valid, ‘V’ = Data not valid7 Mode Indicator A Mode indicator‘N’ = Data not valid‘A’ = Autonomous mode‘D’ = Differential mode‘E’ = Estimated (dead reckoning) mode‘M’ = Manual input mode‘S’ = Simulator mode8 Checksum 57GSA – GNSS DOP and Active SatellitesGPS receiver operating mode, satellites used in the navigation solution reported by the GGA or GNS sentence and DOP values.Structure:$GPGSA,A,x,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,x.x,x.x,x.x*hh<CR><LF>1 2 3 3 3 3 3 3 3 3 3 3 3 3 4 5 6 7Example:$GPGSA,A,3,05,12,21,22,30,09,18,06,14,01,31,,1.2,0.8,0.9*36<CR><LF>Field Name Example Description1 Mode A Mode‘M’ = Manual, forced to operate in 2D or 3D mode‘A’ = Automatic, allowed to automatically switch 2D/3D 2 Mode 3 Fixtype1 = Fix not available2 = 2D3 = 3D3 Satellite used 1~12 05,12,21,22,30,09,18,06,14,01,31,, Satellite ID number, 01 to 32, of satellite used in solution, up to 12 transmitted4 PDOP 1.2 Position dilution of precision (00.0 to 99.9)5 HDOP 0.8 Horizontaldilutionof precision (00.0 to 99.9)6 VDOP 0.9 Vertical dilution of precision (00.0 to 99.9)7 Checksum 36GSV – GNSS Satellites in ViewNumber of satellites (SV) in view, satellite ID numbers, elevation, azimuth, and SNR value. Four satellites maximum per transmission.Structure:$GPGSV,x,x,xx,xx,xx,xxx,xx,…,xx,xx,xxx,xx *hh<CR><LF>1 2 3 4 5 6 7 4 5 6 7 8Example:$GPGSV,3,1,12,05,54,069,45,12,44,061,44,21,07,184,46,22,78,289,47*72<CR><LF>$GPGSV,3,2,12,30,65,118,45,09,12,047,37,18,62,157,47,06,08,144,45*7C<CR><LF>$GPGSV,3,3,12,14,39,330,42,01,06,299,38,31,30,256,44,32,36,320,47*7B<CR><LF>Field Name Example Description1 Number of message 3 Total number of GSV messages to be transmitted (1-3)2 Sequence number 1 Sequence number of current GSV message3 Satellites in view 12 Total number of satellites in view (00 ~ 12)4 Satellite ID 05 Satellite ID number, GPS: 01 ~ 32, SBAS: 33 ~ 64 (33 =PRN120)elevation in degrees, (00 ~ 90)5 Elevation 54 Satellite6 Azimuth 069 Satellite azimuth angle in degrees, (000 ~ 359 )7 SNR 45 C/No in dB (00 ~ 99)Null when not tracking8 Checksum 72RMC – Recommended Minimum Specific GNSS DataTime, date, position, course and speed data provided by a GNSS navigation receiver. Structure:$GPRMC,hhmmss.sss,A,dddmm.mmmm,a,dddmm.mmmm,a,x.x,x.x,ddmmyy,,,a*hh<CR><LF>1 2 3 4 5 6 7 8 9 10 11 Example:$GPRMC,111636.932,A,2447.0949,N,12100.5223,E,000.0,000.0,030407,,,A*61<CR><LF> Field Name Example Description1 UTC time 0111636.932 UTC time in hhmmss.sss format (000000.00 ~235959.999)2 Status A Status‘V’ = Navigation receiver warning‘A’ = Data Valid3 Latitude 2447.0949 Latitude in dddmm.mmmm formatLeading zeros transmitted4 N/S indicator N Latitude hemisphere indicator‘N’ = North‘S’ = South5 Longitude 12100.5223 Longitude in dddmm.mmmm formatLeading zeros transmitted6 E/W Indicator E Longitude hemisphere indicator'E' = East'W' = West7 Speed over ground 000.0 Speed over ground in knots (000.0 ~ 999.9)8 Course over ground000.0 Course over ground in degrees (000.0 ~ 359.9)9 UTC Date 030407 UTC date of position fix, ddmmyy format10 Mode indicator A Mode indicator‘N’ = Data not valid‘A’ = Autonomous mode‘D’ = Differential mode‘E’ = Estimated (dead reckoning) mode‘M’ = Manual input mode‘S’ = Simulator mode11 checksum 61VTG – Course Over Ground and Ground SpeedThe actual course and speed relative to the ground.Structure:GPVTG,x.x,T,,M,x.x,N,x.x,K,a*hh<CR><LF>1 2 3 4 5Example:$GPVTG, 000.0,T,,M,000.0,N,0000.0,K,A*3D<CR><LF>Field Name Example Description1 Course 000.0 True course over ground in degrees (000.0 ~ 359.9)2 Speed 000.0 Speed over ground in knots (000.0 ~ 999.9)3 Speed 0000.0 Speed over ground in kilometers per hour (0000.0 ~1800.0)indicator4 Mode A Mode‘N’ = not valid‘A’ = Autonomous mode‘D’ = Differential mode‘E’ = Estimated (dead reckoning) mode‘M’ = Manual input mode‘S’ = Simulator mode5 Checksum 3DORDERING INFORMATIONModel Name Description GPS03 Default 9600 baud rate。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、概述:
1、产品名称:AMF 零点定位系统及附件
2、产品型号:K10.3,K20,K20.3
二、产品结构
1、锁紧钢珠
2、安装螺栓
3、螺纹销(辅助零点定位单元的安装,未在图中标出)
4、螺纹销,用于不使用自动除屑的应用
5、螺纹销,用于使用自动除屑的应用
6、安装工具
AMF零点定位系统使用说明书
三、产品安装及使用
(一)零点定位接头凹头的安装
不要讲安装工具⑥去掉
去掉保护橡胶圈
清洁安装孔,及安装表面,并涂入润滑
脂,将零点定位单元凹头装为安装孔,
并安装平
旋紧安装螺栓旋紧螺栓时使用扭矩扳手,M6,扭矩8Nm拆卸安装工具⑥
将螺纹销④或⑤旋入零点定位接头凹头内孔底部的螺纹孔,并用适合于不锈钢的胶粘结。
(二)零点定位接头凸头的安装
1、需要更换的夹具托盘
2、紧固螺栓
3、零点定位接头凸头
4、扭矩扳手K20M12扭矩120Nm 零点定位接头凸头(1)
单向定位接头凸头(2)
紧固定位接头凸头(3)
K10
M8
34Nm
扭矩
䴬⛯ᇐփ䬶Ⲻᑮ⭞࠼ᐹ
䘉⿽ᇊս䬰࠶ᐳ䘲⭘Ҿа㡜⭏ӗ⧟ຳDŽ
䴦⛩ᇊս䬰䎧ࡠ䲀ࡦ;ˈ<ᯩੁ㠚⭡ᓖⲴ⭘ˈᡀѪ৲㘳ส⛩˗অੁᇊս䬰ਚ䲀ࡦ䖜ᯩੁⲴ㠚⭡ᓖˈ
㘼㍗പᇊս䬰ਚ䎧ࡠ໎࣐ཀྵ㍗࣋Ⲵ⭘ˈ䘉ṧਟԕ؍䇱ᮤњᢈⴈⲴᆼޘᇊսˈ
䚯ݽ䗷ᇊսDŽঅੁᇊս䬰䴦⛩ᇊս䬰㍗പᇊս䬰
3
3
1
2
12
3ᇐփ䬶ᆿ㻻ᆊⲺࣖᐛተሮ
ተሮ
Dia.D1Dia.M S1S2K027,17M 53,614K510,00M 62,512K1015,00M 83,516K2025,00M125,523K40
25,00
M16
5,5
30
ഴ⽰
മѝᱮ⽪Ⲵᱟᇊս䬰઼㍗പ㷪ṃDŽ
注意:
单向定位接头的两个凸点连线需要垂直于零点定位接头和单向定位接头的连线方向。
公差要求:
A=零点定位接头凸头到单向定位接头凸头的距离+/-0.01mm
B=零点定位接头凸头到紧固定位接头凸头的距离+/-0.03mm
1、使用的压缩空气必须无水,并进行油雾润滑,润滑标准(~2-5ml/m³),使用DIN51524-2VG 32润滑油或相近的润滑油;
2、适当的维护有助于保证零点定位系统的长期使用。
在日常使用时请注意进行维护。
每天的维护:清理零点定位系统的铁屑,可以使用气枪或者真空吸屑器每月的维护:①肉眼观察零点定位系统的状态
②检查定位单元的紧固螺栓以及定位接头的紧固螺栓③检查零点定位系统的功能。
每年的维护:
K20气压型零点定位系统需要每年或者每15万次进行以下主动维护:①检查零点定位单元的密封圈②检查零点定位单元的弹簧
用户可根据实际生产情况进行强制、预防性更换这些元件。
四、使用与维护。