(仅供参考)abb定位器简明操作说明
ABB定位器说明书

ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
ABB定位器中文说明书

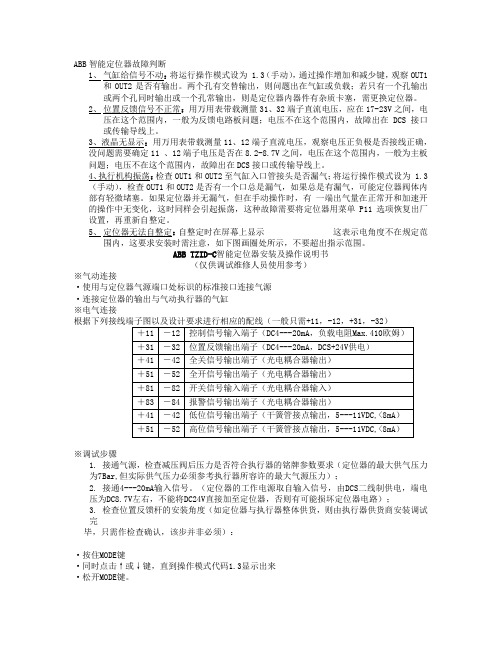
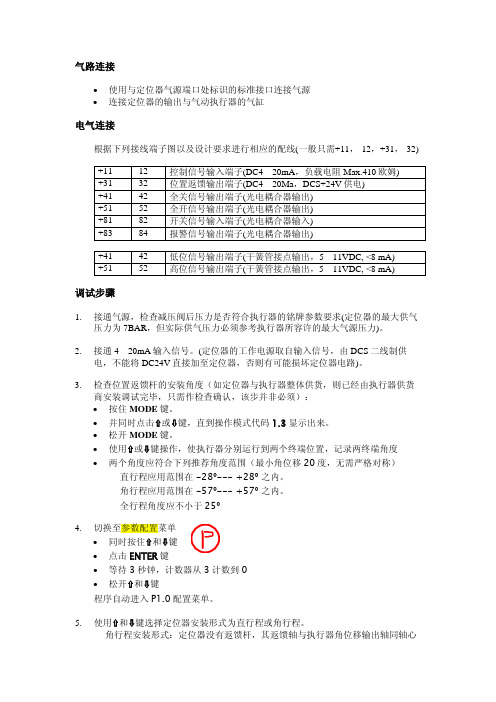
气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31 -32 位置返馈输出端子(DC4---20Ma,DCS+24V供电)+41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+81 -82 开关信号输入端子(光电耦合器输入)+83 -84 报警信号输出端子(光电耦合器输出)+41 -42 低位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)+51 -52 高位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
ABB定位器说明书

ABB 智能定位器故障判断1、气缸给信号不动:将运行操作模式设为(手动),通过操作增加和减少键,观察OUT和OUT2是否有输出。
两个孔有交替输出,贝U问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V 之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DC宓口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11、12端子电压是否在之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DC教口或传输导线上。
4、执行机构振荡:检查OUT和OUT2!气缸入口管接头是否漏气;将运行操作模式设为(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABBTZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32 )※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MOD键•同时点击f或J键,直到操作模式代码显示出来•松开MOD键。
ABB定位器说明
ABB Positioner TZID-C1 打开气源;2 接4-20mA信号到+11/-12;+31/-32接反馈线(24V)3 自检:(1)长按MODE,(2)同时,点按上升或下降键直到出现“1。
3”松按MODE(3)按上升或下降,使定位器移动到上下两个行程的端点,注意其值(角度)直行程:+28>X>-28;角行程:+57>X>-57;4转到设置:(1)同时长按上升和下降键;(2)点按ENTER;(3)出现3到0倒计时完成;(4)松按上升和下降键;定位器将自动到参数设置P1._5选择动作类型:(参数P1.0)用上升和下降选取角行程或直行程;注意:这步必须在自动调节前完成(step 6).6开始自动调节:(1)长按MODE;(2)点按上升键,直到显示“P1。
1”(3)松按MODE(4)按住ENTER直到倒数计时完成;(5)松按ENTER(自检开始)(6)显示“COMPLETE”,时,自检完成。
点按ENTER退出如果因故障自检退出了,没有完成。
会有错误信息显示。
7调节公差带:(通常这一步可不要,仅小阀时用)8可重检设置(如有必要)9保存设置(1)长按MODE(2)点按上升键直到显示“P1。
4”(3)松按MODE(4)用上下键选择“NV-SA VE”(5)长按ENTER直到倒计时完成然后放松ENTER这些参数保存在内存中,定位器按照最后设置的工作状态开始重新工作。
选择操作模式:1 MODE 1。
0 适应控制(1)长按MODE(2)同时点按上键显示:1。
0 CTRL-ADP(3)松按MODE显示:50% POSITION,即适应控制开始运行。
2 MODEL 1。
1 预设控制。
(1)长按MODE(2)时点按上键显示:1。
1 CTRL-FIX(3)按MODE显示:50%POSITION,即预设控制开始运行。
3 MODEL 1。
2 在执行器的实际行程内手动调节(1)长按MODE(2)同时点按上键显示:1。
ABB定位器说明书.
ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
abb定位器简明操作说明
二级功能分 组 P1._ STANDARD 基本参数组
三级功能分类及显 示器文字描述 P1.0 ACTUATOR P1.1 AUTO_ADJ AUTO_ADJ P1.2 TOL_BAND P1.3 TEST P1.4 EXIT
功 定义定位器安装形式 启动自动整定程序 设定偏差带或死区 试验修改结果 退出到运行操作级
P3._ ACTUATOR 执行器特性 组 P4._ MESSAGES
P3.0 MIN_RGE P3.1 MAX_RGE P3.2 ZERO_POS P3.3 EXIT P4.0 TIME _OUT P4.1 POS_SW1 P4.2 POS_SW2 P4.3 SW1_ACTV P4.4 SW2_ACTV P4.5 EXIT
有些项中又可分若干分项以供选择,如 P1.0 中可选择 LINEAR 用于直行程执 行器,选择 ROTORY 用于角行程执行器。又如 P1.4 EXIT 中可选择 NV_SAVE(Non-V Volatile save)存盘退出或 CANCEL 不存盘退出。 有些项中只有数值以供调整,如分程调节中给定信号为 4—12 mA ,则 P2.0 中的数值应设为 4 mA ,而 P2.1 中的数值应设为 12mA. 如给定信号为 4—12 mA ,则 P2.0 中的数值应设为 12 mA ,而 P2.1 中的数值应设为 20mA.
调试步骤
1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气 压力为 7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。 接通 4---20mA 输入信号。(定位器的工作电源取自输入信号,由 DCS 二线制供 电,不能将 DC24V 直接加至定位器,否则有可能损坏定位器电路)。 检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货 商安装调试完毕,只需作检查确认,该步并非必须): • 按住 MODE 键。 • • • • 并同时点击⇧或⇩键,直到操作模式代码 1.3 显示出来。 松开 MODE 键。 使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度 两个角度应符合下列推荐角度范围(最小角位移 20 度,无需严格对称) 直行程应用范围在 -28º--- +28º 之内。 角行程应用范围在 -57º--- +57º 之内。 全行程角度应不小于 25º 4. 切换至参数配置菜单 • • • • 同时按住⇧和⇩键 点击 ENTER 键 等待 3 秒钟,计数器从 3 计数到 0 松开⇧和⇩键
(整理)ABB智能定位器使用说明.

概述定位器的作用使风门、档板按照运行人员的意愿动作,使被调对象达到要求的范围,使设备达到安全运行。
菏泽电厂原设计使用F40、F20的风门档板都是风、烟系统上的重要设备,如送风机入口冷风、暖风调节档板,六个二次风调节档板,炉底注入风调节档板、磨煤机热风、冷风调节档板、磨煤机旁路风调节档板,这些设备运行状况的好坏,涉及到重大辅机的保护、跳闸问题,使机组降出力,严重时使锅炉燃烧不稳定,导致锅炉灭火,甚至毁坏设备。
英巴公司对此问题也进行了表态,承认F40、F20定位器质量不可靠。
通过了解聊城电厂F40、F20定位器使用情况,和我厂情况一样,故障率特别高,曾经给机组的安全稳定运行构成不同程度的威胁,聊城电厂已将F40、F20定位器全部更换成ABB定位器,效果有明显改善,风门、档板控制的工况更加稳定,保证了机组的安全运行。
因此为保证我厂机组的安全稳定高效运行,将F40、F20定位器改造成质量较可靠的双端控制输出气源ABB定位器。
ABB定位器在我厂的其它设备上已经长时间使用,工作稳定,故障率底,调节特性灵敏,深受电厂单位的青睐。
目前#4炉所用的F40和F20两种类型的I/P电气转换器经常出现堵塞、漏气、反馈信号不可靠、线性不好等缺陷,使风门、档板无法按照运行人员的意愿动作,使风门、档板失控,导致风门、档板要么拒动,要么全开全关,使被调工况超出允许范围,直接威胁机组的安全运行,英巴公司对此问题表态,承认F40、F20定位器质量不可靠,为保证机组的安全稳定运行,将F40定位器改造成质量较可靠的双端输出气源ABB定位器。
将F40定位器改造成质量较可靠的ABB定位器,使风门、档板按照运行人员的意愿动作,使被调对象达到要求的范围,使设备达到安全运行。
F40改造成ABB定位器,只需加工ABB定位器与现气缸连接转换接头,再将ABB定位器通过转换接头安装在现气缸上,将气源管路配接牢固,和机务重新定位调试。
1 F40型I/P电气转换器F40型定位器是通过将微处理器技术与气动控制装置电气接口有机结合起来,最基本的型号为2线式仪器,一个工业标准的20mA信号既用作控制信号,又用作电子线路的电源,通过插接接头可进行连接,微处理器的采用使设置操作变得非常简单、迅速。
(仅供参考)abb定位器简明操作说明
TZID-C 智能定位器 安装及操作说明书气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32) +11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31 -32 位置返馈输出端子(DC4---20Ma,DCS+24V供电)+41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+81 -82 开关信号输入端子(光电耦合器输入)+83 -84 报警信号输出端子(光电耦合器输出)+41 -42 低位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)+51 -52 高位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
ABB智能定位器
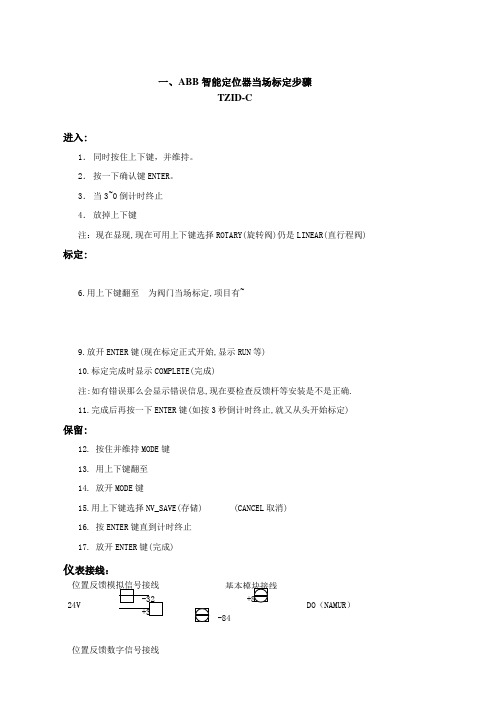
24V-84一、ABB智能定位器当场标定步骤TZID-C进入:1.同时按住上下键,并维持。
2.按一下确认键ENTER。
3.当3~0倒计时终止4.放掉上下键注:现在显现,现在可用上下键选择ROTARY(旋转阀)仍是LINEAR(直行程阀)标定:6.用上下键翻至为阀门当场标定,项目有~9.放开ENTER键(现在标定正式开始,显示RUN等)10.标定完成时显示COMPLETE(完成)注:如有错误那么会显示错误信息,现在要检查反馈杆等安装是不是正确.11.完成后再按一下ENTER键(如按3秒倒计时终止,就又从头开始标定)保留:12. 按住并维持MODE键13. 用上下键翻至14. 放开MODE键15.用上下键选择NV_SAVE(存储) (CANCEL取消)16. 按ENTER键直到计时终止17. 放开ENTER键(完成)仪表接线:位置反馈数字信号接线DO(NAMUR)SW1-52 +51 SW224V-82+11 -12二、ABB 智能定位器当场操作步骤选择操作模式:模式:自适应操纵1、 按住并维持MODE 键2、 另外按3、 显示4、 放开5、 显示自动运行状态模式:修正操纵 1、 按住并维持MODE 键切断功能接线 4~20MA 信号DI (12V )2、 另外按3、显示4、放开五、显示强制操纵正在运行模式:行程范围内手动调整 一、按住并维持MODE 键 2、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是0%~100%的阀位六、按 或 在行程范围内调整定位器模式:行程范围内手动调整 一、按住并维持MODE 键 3、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是阀门转角(注1)六、按 或 在行程范围内调整定位器注1:直行程必需在-280~280之间,角行程必需在-570~570之间。
三、阀位与行程反馈不对应解决方式如图1所示,定位器的原理是气缸的角位移通过‘中间连接件’传递给‘反馈轴’,反馈轴上的‘传动齿轮’去带动反馈电机,测得的反馈电势与输出维持平稳。
ABB定位器说明书

ABB智能定位器故障判断之杨若古兰创作1、气缸给旌旗灯号不动:将运转操纵模式设为 1.3(手动),通过操纵添加和减少键,观察OUT1和OUT2是否有输出.两个孔有交替输出,则成绩出在气缸或负载;若只要一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器.2、地位反馈旌旗灯号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,普通为反馈电路板成绩;电压不在这个范围内,故障出在DCS接口或传输导线上.3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线准确,没成绩须要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,普通为主板成绩;电压不在这个范围内,故障出在DCS接口或传输导线上.4、履行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运转操纵模式设为1.3(手动),检查OUT1和OUT2是否有一个口老是漏气,如果老是有漏气,可能定位器阀体内部有轻微堵塞.如果定位器并没有漏气,但在手动操纵时,有一端出气量在正常开和加速开的操纵中无变更,这时候同样会惹起振荡,这类故障须要将定位器用菜单P11选项恢复出厂设置,再从头自整定.5、定位器没法自整定:自整定时在屏幕上显示这暗示电角度不在规定范围内,这请求安装时需留意,如下图画圈处所示,不要超出唆使范围.ABB TZID-C智能定位器安装及操纵说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的尺度接口连接气源·连接定位器的输出与气动履行器的气缸※电气连接根据以下接线端子图和设计请求进行响应的配线(普通只需+11,-12,+31,-32)1. 接通气源,检查减压阀后压力是否符合履行器的铭牌参数请求(定位器的最大供气压力为7Bar,但实际供气压力必须参考履行器所容许的最大气源压力);2. 接通4---20mA输入旌旗灯号.(定位器的工作电源取自输入旌旗灯号,由DCS二线制供电,端电压为摆布,不克不及将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查地位反馈杆的安装角度(如定位器与履行器全体供货,则由履行器供货商安装调试完毕,只需作检查确认,该步并不是必须):·按住MODE键·同时点击↑或↓键,直到操纵模式代码显示出来·松开MODE键.·使用↑或↓键操纵,使履行器分别运转到两个终端地位,记录两终端角度.·两个角度应符合以下推荐角度范围(最小角位移20度;无需严酷对称)直行程(小角度)利用在-28°---+28°以内.角行程(大角度)利用在-57°---+57°以内.全行程角度应不小于25°4. 启动主动调整程序方法一·按住MODE键·同时点击↑或↓键,直到操纵模式代码显示出来根据变换角度分歧,分别选择MODE键或ENTER键进行主动整定;直行程(小角度):·按住MODE键直到显示ADJ-LIN,然后松开该键,·再按住MODE键3秒直到计数器倒数到0,·松开MODE键,主动调整程序开始运转(显示正在进行的程序语句号).·主动调整程序顺利结束后,零碎参数会被主动存储.角行程(大角度):·按住ENTER键直到显示ADJ-ROT,然后松开该键,·再按住ENTER键3秒直到计数器倒数到0,·松开ENTER键,主动调整程序开始运转(显示正在进行的程序语句号).·主动调整程序顺利结束后,零碎参数会被主动存储.5.切换至参数配置菜单·同时按下↑和↓键·点击ENTER键,然后松开该键,·计数器从3计数到0,·松开↑和↓键程序主动进入配置菜单6.使用↑和↓键选择定位器运转方式为直行程或角行程.角行程运转方式:角度变换大于-28°—+28°(56°)小于-57°—+57°(114°).直行程运转方式:角度变换小于-28°—+28°(56°).留意:进行主动调整之前,请确认实际安装方式是否与定位器菜单所选方式符合,由于主动调整过程中定位器对履行器行程终端的定义方法分歧,且线性化校订数据库分歧,可能导致较大的非线性误差.7.启动主动调整程序方法二(履行器或阀门安装终了后,零碎最好通过此程序从头整定);·按住MODE键·点击↑键一次或多次,直到显示出“”·松开MODE键·按住ENTER键3秒直到计数器倒数到0·松开ENTER键,主动调整程序开始运转(显示正在进行的程序语句号).·主动调整程序顺利结束后,显示器显示“COMPLETE”.在主动调整过程中如果碰到故障,程序将自愿终止并显示出故障代码,根据故障代码即可检查故障缘由,也能够人为地强制间断主动调整程序.8.如有须要,进入“”调整控制偏差带9.如有须要,进入“”调整控制死区10.如有须要,进入“”测试设定后果.11.存储设定结果:·按住MODE键·点击↑或↓键一次或多次,直到显示出“ ”·松开MODE键·用↑或↓键选择NV_SAVE(若选择“CANCEL”,此前所作点窜将不予存储).·按住ENTER键3秒直到计数器倒计数结束后松开(选择“CANCEL”不存储,也需执此步调退出参数配置级).前面所进行的设定和主动调整中所测得的参数将存储在EEPROM中,定位器转换到先前选择的运转级操纵模式.※运转级操纵模式的选择模式:自适应控制模式·按住MODE键·点击↑键一次或多次,直到显示出“1.0 CTRL_ADP”·松开MODE键·显示器显示阀位百分数如“50.0% POSITION”模式:固定控制模式·按住MODE键·点击↑键一次或多次,直到显示出“1.1 CTRL_FIX”·松开MODE键·显示器显示阀位百分数如“50.0% POSITION”模式:在履行器的实际全行程范围内手动控制·按住MODE键·点击↑键一次或多次,直到显示出“1.2 MANUAL”·松开MODE键·显示器显示阀位百分数如“50.0% POSITION”·使用↑或↓键进行手动控制先按住↑键再按住↓键(始终按住↑键),履行器将快速开启先按住↓键再按住↑键(始终按住↓键),履行器将快速关闭模式:在定位器的检测范围内手动控制·按住MODE键·点击↑键一次或多次,直到显示出“”·松开MODE键·显示器显示反馈杆所处角度地位如“°SENS_POS”·使用↑或键进行手动控制.先按住↑键再按住↓键(始终按住↑键),履行器将快速开启先按住↓键再按住↑键(始终按住↓键),履行器将快速关闭请参阅附后功能表总图参数设定举例:将阀门的正感化改为反感化(定位器初始设定适合于正感化阀门,如实际阀门为反感化型式,即阀杆上行关闭阀门,则需确认P2.3=Reverse)普通的阀门出厂之前曾经点窜此参数无需用户再点窜,但可以通过下述方法检查.定位器起始地位可所以运转模式中任意方式.1.切换至配置功能菜单·同时按住↑和↓键·点击ENTER键·等待3秒钟,计数器从3倒计数至0·松开↑和↓键·显示器显示“P1.0 ACTUATOR”2.从配置功能菜单当选择第二组参数·同时按住MODE和ENTER两键·点击↑键·显示器显示“P2._ SETPOINT”·松开MODE和ENTER两键·显示器显示“P2.0 MIN-PGE”3.从第二组配置参数当选择阀门感化方式P2.3·按住MODE键·点击↑键3次·显示器显示“P2.3 ACTION”·松开MODE键4.更改阀门感化方式·点击↑或↓键选择“REVERSE5.切换至“”存储并退出·按住MODE键·点击↑或↓键多次直至显示器显示“P2.8 EXIT”·松开MODE键·用↑或↓键选择NV-SAVE·按住ENTER键直到计数器倒计数结束后松开前面所进行的设定和主动调整中所测得的参数将存储在EEPROM中,定位器转换到先前所选择的运转模式.TZID-C系列智能定位器程序功能图解1.功能级分类:运转操纵级:适用于初次调试及日常的检查和现场开关操纵参数配置级:适用于初次调试中的参数设置及整定2.运转操纵菜单:※普通情况下选择进行远方主动控制.只要在履行器实际行程非常小而履行器速度太快,控制容易发生振荡时选择控制模式,但其控制精度绝对低.操纵模式中的和均可应用键盘开启或关闭履行器,但公用于手操,而公用于检测定位器反馈杆实际运转范围是否超出传感器的最大检测范围,以便校订反馈杆的连接,取得最好的控制后果.3.参数配置级参数配置共分11组,用(P为PARAMETER首字母)暗示,而每一组又分若干项,如分共6项,分共9项.有些项中又可分若干分项以供选择,如中可选择LINEAR用于角度变换小于56°,选择ROTARY用于角度变换大于56°,又如中可选择NV_SAVE(Non-Volatile save)存盘退出或CANCEL不存盘退出.有些项中只无数值以供调整,如分程调节中给定旌旗灯号为4-12mA,则中的数值应设为4mA,而中的数值应设为12mA,如给定旌旗灯号为4-20mA,则中的数值应设为4mA,而中的数值应设为20mA.参数配置菜单为主动整定程序,为履行器的正反感化方式(正感化为输出口1气压添加阀杆下行),为正反调节方式(正感化为4毫安对应阀位0%),为阀位反馈正反感化方式(正感化阀位0%输出4毫安)111,正反感化调整:给定旌旗灯号与阀门感化方向不异,定位器显示相反,先改,后改;给定旌旗灯号与定位器显示不异,阀门感化方向相反,只改;定位器显示与阀门感化方向不异,给定旌旗灯号相反,只改;2,恢复出厂参数设置如果因定位器参数设置错误而形成阀门没法正常工作,可通过恢复定位器出厂参数设置使其正常工作,方法如下: 12进入参数配置级,按下ENTER键直到倒计时结束;再进入,同样按下ENTER键直到倒计时结束;最初进入保管激活形态,至此完成定位器恢复出厂参数设置.3,定位器输出轴角度准确连接气动履行机构在更换定位器时,必须留意新更换定位器输出轴的角度;先将履行机构输出轴调到全行程的50%,然后再将定位器带有指针的输出轴调到两头地位,(或将定位器运转操纵菜单设到,通过调整输出轴,使面板显示为0°),最初再将定位器输出轴与履行机构连接紧固.。
abb定位器调节方法
ABB智能定位器调试及注意事项:打开定位器气源门。
2、向定位器提供4—20MA输入信号(端子为+11,-12)。
3、检查:(1)按下并保持MODE(2)另外短暂按下↑或↓,直到出现MODE 1.3(手动调整)(3)释放MODE(4)按下↑或↓,使执行器开关至其机械限位,并记录数值,角行程执行机构显示旋转角度。
建议限位位置:直行程执行机构>-28°并<+28°;角行程执行机构>-57°并<+57°。
最小角度为25°。
4、切换至组态模式:(1)同时按下并保持↑和↓(2)另外短暂按下ENTER(3)等待一会儿,直到3秒倒计时完成(4)释放↑和↓设备将自动返回到参数组P1._。
注意:PX.Y调节方法(同时按下并保持MODE和ENTER并保持;用↑或↓调节X / 按下并保持MODE;用↑或↓调节Y)5、选择(用↑和↓)参数P1.0 ACTUATOR/定义定位器安装形式角行程ROTARY或直行程LINEAR。
参数P2.3 ACTION/设定阀门正反作用方式反作用(REVERSE) 4~20MA对应开度100~0%或正作用(DIRECT) 4~20MA对应开度0~100%参数P3.2 ZERO_POS/起始点方向设置<预设为全关即反馈杆逆时针方向>顺时针方向关闭CLOCKW或逆时针方向关闭CTCLOCKW。
注意:以上设置必须在自动调整之前完成(即第6步)。
6、启动自动调整功能:(1)同时按下并保持MODE和ENTER(或按下并保持MODE)(2)另外短暂按下↑或↓,直到P1.1显示出来(3)释放MODE(4)按下ENTER并一直按着直到倒计时结束(5)释放ENTER,自动调整功能启动。
(6)如果显示COMPLETE,则表示“自动调整”成功,快速按下ENTER确认。
也有可能因为某种故障“自动调整”被自动取消,同时显示错误信息。
(CLOCKRUN 10 表示超程,需重调反馈杆)7、调整容许区域(tolerance band)(仅仅对于特殊用途的执行机构,比如特别小的执行机构)。
ABB定位器说明书

ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABBTZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
ABB定位器调试步骤
ABB定位器调试步骤
1.定位器面板设置:
ENTER↑
MODE↓LKS
2.内部接线(4根)反馈和指令线。
3..调试前的重要参数切换方式:
①切换就地、远方按住MODE键不要松开,再点击↑↓键可以进行切换。
②用①的方式进入1.1(远方控制)1.2(就地控制)
③若要实现快开,则先按住↑键再按键↓键;实现快关,则先按住↓键再按住↑键,方可完成操作。
④用①的方式进入1.3,出现单词SENS-POS,其意思是显示调节定位器后连杆与后旋钮弧度保持在对称的范围内。
4、调试步骤
①P1.0:将↑↓键同时按,然后点击”ENTER”键,出现单词“LINEAR”调节角行程和直行程。
②P1.1:按住MODE键,点击↑↓键,进入P1.1菜单。
常按ENTER键3S,然后面板显示倒数计时为0后松开,就出现自整定,直到出现完成“COMPIETE”单词。
③P1.4:退出(EXIT)会显示“保存”和“不保存”,按住“ENTER”3S,则保存调试,若不保存,直接按↑键,退出到“放弃”单词,然后再按住“ENTER”3S,退出。
④P2.3出现REVERSE单词,显示的是调节阀门和定位器的正反作用。
⑤P3.2出现CW/CCW单词,调节的是DCS和就地定位器指令的正反作用。
⑥P3.3出现EXIT单词,意思为退出。
⑦P8.2出现DIGEET单词,则调节的是DCS和就地定位器反馈的正反作用。
以上参数为重要参数调试步骤,详情请查看说明书!
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
ABB定位器说明书
ABB定位器说明书12020年4月19日ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),经过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整22020年4月19日定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器32020年4月19日所容许的最大气源压力);2. 接通4---20mA输入信号。
ABB定位器说明书
ABB智能定位器障碍推断之阳早格格创做1、气缸给旗号不动:将运止支配模式设为1.3(脚动),通过支配减少战缩小键,瞅察OUT1战OUT2是可有输出.二个孔有接替输出,则问题出正在气缸或者背载;若惟有一个孔输出或者二个孔共时输出或者一个孔常输出,则是定位器内器件有纯量卡塞,需调换定位器.2、位子反馈旗号不仄常:用万用表戴载丈量31、32端子直流电压,应正在17-23V之间,电压正在那个范畴内,普遍为反馈电路板问题;电压不正在那个范畴内,障碍出正在 DCS接心或者传输导线上.3、液晶无隐现:用万用表戴载丈量11、12端子直流电压,瞅察电压正背极是可接线粗确,出问题需要决定11 、12端子电压是可正在8.2-8.7V之间,电压正在那个范畴内,普遍为主板问题;电压不正在那个范畴内,障碍出正在DCS接心或者传输导线上.4、真止机构振荡:查看OUT1战OUT2至气缸出心管接洽是可漏气;将运止支配模式设为1.3(脚动),查看OUT1战OUT2是可有一个心经常漏气,如果经常有漏气,大概定位器阀体里里有沉微阻碍.如果定位器并不漏气,但是正在脚动支配时,有一端出气量正在仄常开战加速开的支配中无变更,那时共样会引起振荡,那种障碍需要将定位器用菜单P11选项回复出厂树坐,再沉新自整定.5、定位器无法自整定:自整定时正在屏幕上隐现那表示电角度不正在确定范畴内,那央供拆置时需注意,如下图绘圈处所示,不要超出指演示畴.ABB TZID-C智能定位器拆置及支配证明书籍(仅供调试维建人员使用参照)※气动对接·使用与定位器气源端心处标记的尺度接心对接气源·对接定位器的输出与气动真止器的气缸※电气对接根据下列接线端子图以及安排央供举止相映的配线(普遍只需+11,-12※调试步调1. 接通气源,查看减压阀后压力是可切合真止器的铭牌参数央供(定位器的最大供气压力为7Bar,但是本量供气压力必须参照真止器所容许的最大气源压力);2. 接通4---20mA输进旗号.(定位器的处事电源与自输进旗号,由DCS二线制供电,端电压为安排,不克不迭将DC24V间接加至定位器,可则有大概益坏定位器电路);3. 查看位子反馈杆的拆置角度(如定位器与真止器真足供货,则由真止器供货商拆置调试完毕,只需做查看确认,该步并不是必须):·按住MODE键·共时面打↑或者↓键,直到支配模式代码隐现出去·紧开MODE键.·使用↑或者↓键支配,使真止器分别运止到二个终端位子,记录二终端角度.·二个角度应切合下列推荐角度范畴(最小角位移20度;无需庄重对于称)直路程(小角度)应用正在-28°---+28°之内.角路程(大角度)应用正在-57°---+57°之内.齐路程角度应不小于25°4. 开用自动安排步调要领一·按住MODE键·共时面打↑或者↓键,直到支配模式代码隐现出去根据变更角度分歧,分别采用MODE键或者ENTER键举止自动整定;直路程(小角度):·按住MODE键直到隐现ADJ-LIN,而后紧开该键,·再按住MODE键3秒直到计数器倒数到0,·紧开MODE键,自动安排步调开初运止(隐现正正在举止的步调语句号).·自动安排步调成功中断后,系统参数会被自动保存.角路程(大角度):·按住ENTER键直到隐现ADJ-ROT,而后紧开该键,·再按住ENTER键3秒直到计数器倒数到0,·紧开ENTER键,自动安排步调开初运止(隐现正正在举止的步调语句号).·自动安排步调成功中断后,系统参数会被自动保存.5.切换至参数摆设菜单·共时按下↑战↓键·面打ENTER键,而后紧开该键,·计数器从3计数到0,·紧开↑战↓键步调自动加进摆设菜单6.使用↑战↓键采用定位器运止形式为直路程或者角路程.角路程运止形式:角度变更大于-28°—+28°(56°)小于-57°—+57°(114°).直路程运止形式:角度变更小于-28°—+28°(56°).注意:举止自动安排之前,请确认本量拆置形式是可与定位器菜单所选形式相符,果为自动安排历程中定位器对于真止器路程终端的定义要领分歧,且线性化矫正数据库分歧,大概引导较大的非线性缺面.7.开用自动安排步调要领二(真止器或者阀门拆置完成后,系统最佳通过此步调沉新整定);·按住MODE键·面打↑键一次或者多次,直到隐现出“”·紧开MODE键·按住ENTER键3秒直到计数器倒数到0·紧开ENTER键,自动安排步调开初运止(隐现正正在举止的步调语句号).·自动安排步调成功中断后,隐现器隐现“COMPLETE”.正在自动安排历程中如果逢到障碍,步调将志愿终止并隐现出障碍代码,根据障碍代码即可查看障碍本果,也不妨人为天强制中断自动安排步调.8.如有需要,加进“”安排统制偏偏好戴9.如有需要,加进“”安排统制死区10.如有需要,加进“”尝试设定效验.11.保存设定截止:·按住MODE键·面打↑或者↓键一次或者多次,直到隐现出“ ”·紧开MODE键·用↑或者↓键采用NV_SAVE(若采用“CANCEL”,此前所做建改将不予保存).·按住ENTER键3秒直到计数器倒计数中断后紧开(采用“CANCEL”不保存,也需执此步调退出参数摆设级).前里所举止的设定战自动安排中所测得的参数将保存正在EEPROM中,定位器变更到先前采用的运止级支配模式.※运止级支配模式的采用模式:自切合统制模式·按住MODE键·面打↑键一次或者多次,直到隐现出“1.0 CTRL_ADP”·紧开MODE键·隐现器隐现阀位百分数如“50.0% POSITION”模式:牢固统制模式·按住MODE键·面打↑键一次或者多次,直到隐现出“1.1 CTRL_FIX”·紧开MODE键·隐现器隐现阀位百分数如“50.0% POSITION”模式:正在真止器的本量齐路程范畴内脚动统制·按住MODE键·面打↑键一次或者多次,直到隐现出“1.2 MANUAL”·紧开MODE键·隐现器隐现阀位百分数如“50.0% POSITION”·使用↑或者↓键举止脚动统制先按住↑键再按住↓键(终究按住↑键),真止器将赶快开开先按住↓键再按住↑键(终究按住↓键),真止器将赶快关关模式:正在定位器的检测范畴内脚动统制·按住MODE键·面打↑键一次或者多次,直到隐现出“”·紧开MODE键·隐现器隐现反馈杆所处角度位子如“°SENS_POS”·使用↑或者键举止脚动统制.先按住↑键再按住↓键(终究按住↑键),真止器将赶快开开先按住↓键再按住↑键(终究按住↓键),真止器将赶快关关请参阅附后功能表总图参数设定举例:将阀门的正效率改为反效率(定位器初初设定切合于正效率阀门,如本量阀门为反效率型式,即阀杆上止关关阀门,则需确认P2.3=Reverse)普遍的阀门出厂之前已经建改此参数无需用户再建改,但是不妨通过下述要领查看.定位器起初位子不妨是运止模式中任性办法.1.切换至摆设功能菜单·共时按住↑战↓键·面打ENTER键·等待3秒钟,计数器从3倒计数至0·紧开↑战↓键·隐现器隐现“P1.0 ACTUATOR”2.从摆设功能菜单中采用第二组参数·共时按住MODE战ENTER二键·面打↑键·隐现器隐现“P2._ SETPOINT”·紧开MODE战ENTER二键·隐现器隐现“P2.0 MIN-PGE”3.从第二组摆设参数中采用阀门效率办法P2.3·按住MODE键·面打↑键3次·隐现器隐现“P2.3 ACTION”·紧开MODE键4.变动阀门效率办法·面打↑或者↓键采用“REVERSE5.切换至“”保存并退出·按住MODE键·面打↑或者↓键多次直至隐现器隐现“P2.8 EXIT”·紧开MODE键·用↑或者↓键采用NV-SAVE·按住ENTER键直到计数器倒计数中断后紧开前里所举止的设定战自动安排中所测得的参数将保存正在EEPROM中,定位器变更到先前所采用的运止模式.TZID-C系列智能定位器步调功能图解1.功能级分类:运止支配级:适用于初次调试及凡是的查看战现场开关支配参数摆设级:适用于初次调试中的参数树坐及整定2.※普遍情况下采用举止近圆自动统制.惟有正在真止器本量路程非常小而真止器速度太快,统制简单爆收振荡时采用统制模式,但是其统制粗度相对于矮.支配模式中的战均可使用键盘开开或者关关真止器,但是博用于脚操,而博用于检测定位器反馈杆本量运止范畴是可超出传感器的最大检测范畴,以便矫正反馈杆的对接,博得最佳的统制效验.3.参数摆设级参数摆设共分11组,用(P为PARAMETER尾字母)表示,而每一组又分若搞项,如分共6项,分共9项.有些项中又可分若搞分项以供采用,如中可采用LINEAR用于角度变更小于56°,采用ROTARY用于角度变更大于56°,又如中可采用NV_SAVE(Non-Volatile save)存盘退出或者CANCEL 不存盘退出.有些项中惟罕见值以供安排,如分程安排中给定旗号为4-12mA,则中的数值应设为4mA,而中的数值应设为12mA,如给定旗号为4-20mA,则中的数值应设为4mA,而中的数值应设为20mA.参数摆设菜单为自动整定步调,为真止器的正反效率形式(正效率为输出心1气压减少阀杆下止),为正反安排形式(正效率为4毫安对于应阀位0%),为阀位反馈正反效率形式(正效率阀位0%输出4毫安)111,正反效率安排:给定旗号与阀门效率目标相共,定位器隐现好异,先改,后改;给定旗号与定位器隐现相共,阀门效率目标好异,只改;定位器隐现与阀门效率目标相共,给定旗号好异,只改;2,回复出厂参数树坐如果果定位器参数树坐过得而制成阀门无法仄常处事,可通过回复定位器出厂参数树坐使其仄常处事,要领如下: 12加进参数摆设级,按下ENTER键直到倒计时中断;再加进,共样按下ENTER键直到倒计时中断;终尾加进保存激活状态,至此完成定位器回复出厂参数树坐.3,定位器输出轴角度粗确对接气动真止机构正在调换定位器时,必须注意新调换定位器输出轴的角度;先将真止机构输出轴调到齐路程的50%,而后再将定位器戴有指针的输出轴调到中间位子,(或者将定位器运止支配菜单设到,通过安排输出轴,使里板隐现为0°),终尾再将定位器输出轴与真止机构对接紧固.。
ABB定位器中文说明书
气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31 -32 位置返馈输出端子(DC4---20Ma,DCS+24V供电)+41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+81 -82 开关信号输入端子(光电耦合器输入)+83 -84 报警信号输出端子(光电耦合器输出)+41 -42 低位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)+51 -52 高位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
ABB定位器说明书

ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
ABB定位器简易调试步骤)

ABB定位器简易调试步骤
第一步:切换至参数配置菜单
同时按下↑和↓键
点击ENTER 键,然后松开该键,
计数器从3计数到0,
松开↑和↓键
程序自动进入P1.0 配置菜单
第二步:按住MODE 键
点击↑键一次或多次,直到显示出“P1.1”
松开MODE 键
按住ENTER 键3秒直到计数器倒数到0
松开ENTER 键,自动调整程序开始运行(显示正在进行的程序语句号)。
等待五到七分钟,自动调整程序顺利结束后,显示器显示“COMPLETE”。
第三步:按住MODE 键
点击↑或↓键一次或多次,直到显示出“ P1.5”
松开MODE 键
用↑或↓键选择NV_SA VE(若选择“CANCEL”,此前所作修改将不予存储)。
按住ENTER 键3秒直到计数器倒计数结束后松开(选择“CANCEL”不存储,也需执此步骤退出参数配置级)。
ABB定位器说明书

ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABBTZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11-12控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31-32位置反馈输出端子(DC4---20mA,DCS+24V供电)+41-42全关信号输出端子(光电耦合器输出)+51-52全开信号输出端子(光电耦合器输出)+81-82开关信号输入端子(光电耦合器输入)+83-84报警信号输出端子(光电耦合器输出)+41-42低位信号输出端子(干簧管接点输出,5---11VDC,<8mA)+51-52高位信号输出端子(干簧管接点输出,5---11VDC,<8mA)※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2.接通4---20mA输入信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TZID-C 智能定位器 安装及操作说明书气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32) +11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31 -32 位置返馈输出端子(DC4---20Ma,DCS+24V供电)+41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+81 -82 开关信号输入端子(光电耦合器输入)+83 -84 报警信号输出端子(光电耦合器输出)+41 -42 低位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)+51 -52 高位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心Page 2 of 9一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
6.启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):•按住MODE键•点击⇧键一次或多次,直到显示出“P1.1”•松开MODE键•按住ENTER键3秒直到计数器倒计数到0ENTER 键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
•松开ENTER•自动调整程序顺利结束后,显示器显示“COMPLETE”。
在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。
也可以人为地强制中断自动调整程序。
7.如有必要,进入“P1.2”调整控制偏差带(或称死区)。
8.如有必要,进入“P1.3”测试设定效果。
9.存储设定结果:•按住MODE键•点击⇧键一次或多次,直到显示出“P1.4”•松开MODE键•用⇧或⇩键选择 NV_SAVE (若选择‘CANCEL’,此前所作修改将不予存储。
)•按住ENTER 键3秒直到计数器倒计数结束后松开前面所进行的设定和自动调整中所测得的参数将存储在EEPROM 中,定位器转换到先前所选择的运行级操作模式。
运行级操作模式的选择1.0模式:自适应控制模式•按住MODE键•点击⇧键一次或多次,直到显示出“1.0 CTRL_ADP”•松开MODE键•显示器显示阀位百分数如“50.0% POSITION”1.1模式:固定控制模式•按住MODE键•点击⇧键一次或多次,直到显示出“1.1 CTRL_FIX”• 松开MODE 键• 显示器显示阀位百分数如“50.0% POSITION”1.2 模式: 在执行器的实际全行程范围内手动控制• 按住MODE 键• 点击⇧键一次或多次,直到显示出“1.2 MANUAL ”• 松开MODE 键• 显示器显示阀位百分数如“50.0% POSITION”• 使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键(始终按住⇧键),执行器将快速开启先按住⇩键,再按住⇧键(始终按住⇩键),执行器将快速关闭1.3 模式: 在定位器的检测范围内手动控制• 按住MODE 键• 点击⇧键一次或多次,直到显示出“1.3 MAN_SENS ”• 松开MODE 键• 显示器显示返馈杆所处角度位置如“-15.0º SENS_POS”• 使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键,执行器将快速开启先按住⇩键,再按住⇧键,执行器将快速关闭请参阅附后功能表总图参数参数设定举例设定举例设定举例:: 将阀门的正作用改为反作用(定位器初始设定适合于正作用阀门,如实际驱动的阀门为 反作用型式即阀杆上行关闭阀门,则需确认P2.3=Reverse)一般的阀门出厂之前已经修改此参数无需用户再修改,但可以通过下述方法检查。
定位器起始位置可以是 运行模式中的任意方式1. 切换至配置功能菜单• 同时按住⇧和⇩键• 点击ENTER 键• 等待3秒钟,计数器从3倒计数至0• 松开⇧和⇩键• 显示器显示“P1.0 ACTUATOR”2. 从配置功能菜单中选择第二组参数• 同时按住MODE 和ENTER 两键• 点击⇧键• 显示器显示“P2._ SETPOINT ”• 松开 MODE 和ENTER 两键• 显示器显示“P2.0 MIN_PGE”3. 从第二组配置参数中选择阀门作用方式P2.3• 按住MODE 键• 点击⇧键3次• 显示器显示“P2.3 ACTION”• 松开MODE 键4. 更改阀门作用方式• 点击⇧键选择“REVERSE ”5. 切换至“P2.7 EXIT” 存储并退出• 按住MODE 键• 点击⇧键多次直至显示器显示“P2.7 EXIT”• 松开MODE 键• 用⇧或⇩键选择 NV_SAVE• 按住ENTER 键直到计数器倒计数结束后松开前面所进行的设定和自动调整中所测得的参数将存储在EEPROM 中,定位器转换 到先前所选择的运行模式.TZID TZID--C 系列智能定位器程序功能图解系列智能定位器程序功能图解::1. 功能级分类:运行操作级: 适用于初次调试及日常维护中的检查或现场开关操作参数配置级:适用于初次调试中的参数设置及整定2. 运行操作菜单:三级功能分类及显示器文字描述功 能 描 述 1.0 CTRL_ADP选择自适应控制方式(远操) 1.1 CTRL_FIX选择固定控制方式(远操) 1.2 MANUL切换至现场按键操作(开或关) 1.3 MAN_SENS 用于检测位移范围是否合适一般情况下选择1.0进行远方自动控制。
只有在执行器实际行程非常小而执行器速度太快,控制发生振荡时选择1.1控制模式,但其控制精度较低。
操作模式中的1.2和1.3均可运用键盘开启或关闭执行器,但1.2专用于手操,而1.3专用于检测定位器返馈杆实际运行范围是否超出传感器的最大检测范围,以便校正返馈杆的连接,取得最佳的控制效果。
3. 参数配置级参数配置共分11组,用P1._,P2._---P11._(P 为PARAMETER 首字母) 表示, 而每一组又分若干项,如P1._ 分P1.0,P1.1,---P1.4共5项, P2._分P2.0,P2.1, ----P2.7共8项。
有些项中又可分若干分项以供选择,如P1.0中可选择LINEAR用于直行程执行器,选择ROTORY用于角行程执行器。
又如P1.4 EXIT中可选择NV_SAVE(Non-V V olatile save)存盘退出或CANCEL 不存盘退出。
有些项中只有数值以供调整,如分程调节中给定信号为4—12 mA ,则P2.0 中的数值应设为4 mA ,而P2.1中的数值应设为12mA. 如给定信号为4—12 mA ,则P2.0 中的数值应设为12 mA ,而P2.1中的数值应设为20mA.二级功能分组三级功能分类及显示器文字描述 功 能 描 述 P1.0P1.0 ACTUATOR ACTUATOR 定义定位器安装形式 P1.1 AUTO_A P1.1 AUTO_ADJ DJ DJ 启动自动整定程序 P1.2 TOL_BAND设定偏差带或死区 P1.3 TEST试验修改结果 P1._STANDARD基本参数组 P1.4 EXIT P1.4 EXIT退出到运行操作级 P2.0 MIN_RGE 设定给定信号的最小值(预设为4mA) P2.1 MAX_PRG 设定给定信号的最大值(预设为20mA) P2.2 CHARACT选择调节特性曲线 P2.3 ACTION P2.3 ACTION设定阀门正反作用方式 P2.4 SHUT-OFF设定阀门开度阈值 P2.5 RAMP⋀降低开向速度 P2.6 RAMP⋁降低关向速度 P2._SETPOINT给定信号组 P2.7 EXIT退出到运行操作级 P3.0 MIN_RGE 调节曲线起始开度(预设为0%) P3.1 MAX_RGE 调节曲线终止开度(预设为100%) P3.2 ZERO_POS P3.2 ZERO_POS 起始点方向设置(预设为全关即预设为全关即返馈返馈返馈杆逆时针方向杆逆时针方向) P3._ACTUATOR执行器特性组P3.3 EXIT 退出到运行操作级 P4.0 TIME _OUT 定位超时 P4.1 POS_SW1 第一位置信号设置点 P4.2 POS_SW2第二位置信号设置点 P4.3 SW1_ACTV高于或低于第一位置信号时有效 P4.4 SW2_ACTV高于或低于第二位置信号时有效 P4._MESSAGESP4.5 EXIT退出到运行操作级 P5.0 LEACKAGE 启动执行器气缸泄漏报警 P5.1 SP_RGE 启动给定信号超限报警 P5.2 SENS_RGE启动零点漂移报警 P5.3 CTRLER启动远方控制被切换报警 P5.4 TIME-OUT启动定位超时报警 P5.5 STRK_CTR启动调节行程超限报警 P5.6 TRAVEL启动总行程超限报警 P5._ALARMS报警功能组 P5.7 EXIT退出到运行操作级P6.0 MIN_VR 手动设置阀门全关位置 P6.1 MAX_VR手动设置阀门全开位置 P6.2 ACTAUTOR选择执行器型式 P6.3 SPRNG_Y2设定执行器弹簧伸长时定位器返馈杆旋转方向 P6._MAN_ADJ手动调整 P6.4 ADJ_MODE 选择自动调整所需检测的项目P6.5 EXIT退出到运行操作级 P7.0 KP ⋀ 开向比例系数调整 P7.1 KP ⋁ 关向比例系数调整 P7.2 TV ⋀开向积分时间调整 P7.3 TV ⋁关向积分时间调整P7._CTRL_PAR控制参数 P7.11 EXIT退出到运行操作级 P8.0 MIN_RGE 阀位起始点电流值(默认为4mA) P8.1 MAX_RGE 100%阀位电流值(默认为20mA) P8.2 ACTION阀位正反方向选择(默认4mA 对应阀位 0%) P8.3 ALARMP8.4 TESTP8.5 EXIT退出到运行操作级P8._ANLG_OUT模拟信号输出注: 除P1.1, P2.3,P3.2, P8.2外,一般其它的参数无需改动。