纳英特IER智能挑战赛——“九宫医疗”竞赛规则讲解
2022 Enjoy AI挑战赛-疫苗先锋规则

机器人人工智能比赛主题与规则1比赛主题人类社会在各个不同的发展阶段中,一直饱受疾病的困扰,可以说人类发展史就是一部人类与疾病做斗争的历史。
公元前1100多年开始发现的天花,14世纪初发现的黑死病,19世纪初至20世纪末发现的霍乱,20世纪发现的西班牙流感,以及至今仍然存在的禽流感、猪流感等,可以说我们无时无刻都在与疾病作斗争。
随着人类社会的发展,我们对抗疾病的手段也越来越多。
接种牛痘苗预防天花,发现抗生素应对细菌感染,接种疫苗抵御病毒等等,使许多疾病得以控制。
现代人工智能医疗机器人的应用,更能实现对疾病的精确打击。
本次比赛赛事主题为“疫苗先锋”,参赛选手需要自己设计机器人并完成赛事相关任务挑战。
2比赛场地与环境2.1场地比赛场地尺寸为2400×2200mm(图1),场地上左右各有一个基地,赛前确定出发基地。
图1比赛场地透视图2.2比赛环境机器人比赛环境为冷光源、低照度、无磁场干扰。
不过,一般赛场的不确定因素较多,例如,场地表面可能有纹路和不平整,边框上有裂缝,光照条件有变化等等。
参赛队在设计机器人时应考虑各种应对措施。
3比赛任务及评分标准以下任务只是对某些医疗情景的模拟,切勿将它们与真实生活相比。
任务3.1-3.3模型放置在条形方框内,机器人可以以任意方式完成任务。
任务3.4-3.8放置在血管两边,完成任务时,机器人不可脱离血管(机器人与血管的接触点必须在血管内)。
3.1 疫苗研究3.1.1 场地中有一处疫苗研究中心,如图2所示。
3.1.2 机器人将小球取出放置到另一端得60分。
图2 研究中心图3 完成状态3.2 制作疫苗3.2.1 场地中有一处疫苗制作中心,上面放置边长5cm方块,转轴水平,如图4所示。
3.2.2 机器人转动转轴,使得方块移动到另一端,托盘在下方平板中间线的右侧,得70分。
3.2.3 整个过程方块不可掉落。
转轴图4 制作中心托盘托盘在此线的右侧图5 完成状态3.3 获取疫苗3.3.1 场地中有一处疫苗生产中心,如图6所示。
ENJOYAI挑战赛冰雪奥运志愿者比赛规则

ENJOY AI挑战赛-冰雪奥运志愿者比赛规则1比赛主题19世纪末20世纪初,滑雪、滑雪撬、滑冰、冰球等一些冰雪运动逐渐在欧美普及、发展,并日益盛行。
20世纪初,现代奥运会创始人顾拜旦建议单独举办冬季奥运会,并于1924年形成正式的冬奥会。
2018年2月25日晚平昌冬奥会闭幕式上最后的北京八分钟让全世界记忆犹新,24名来自北京体育大学的轮滑演员和24个带着透明冰屏的人工智能机器人,象征着第24届北京奥运会。
他们借助高科技实现的影像变换,在舞台上滑出漂亮的曲线轨迹,在舞台上滑出漂亮的曲线轨迹,与人工智能机器人相映成趣,带来了一场融合科技和文化的视听盛宴。
第24届冬季奥林匹克运动会,将在2022年2月4日至2022年2月20日在中华人民共和国北京市和张家口市联合举行。
这是中国历史上第一次举办冬季奥运会,北京、张家口同为主办城市,也是中国继北京奥运会、南京青奥会后,中国第三次举办的奥运赛事。
随着世界人工智能技术的迅速发展,不难想象2022年北京冬奥会期间,人工智能机器人会运用到冬奥会的各个方面。
礼宾接待、语言翻译、交通运输、安全保卫、医疗卫生、观众指引、物品分发、沟通联络、竞赛组织支持、场馆运行支持、新闻运行支持、文化活动组织支持等工作。
在ENJOY AI挑战赛冰雪奥运志愿者比赛中,参赛选手将要自主设计人工智能机器人在赛场上模拟完成志愿者工作任务。
2比赛场地与环境2.1场地比赛场地尺寸为240X210cm(图1),材质为PU布或喷绘布,黑色引导线宽度为2.5cm,右下角为30*30cm 的基地,左下虚线框为高山滑雪区(板块拼装区),虚线框将其分成4*5的格子,每个格子大小为30*30cm。
图1场地三维示意图图2场地平面示意图2.2赛场环境机器人比赛场地环境为冷光源、低照度、无磁场干扰。
但由于一般赛场环境的不确定因素较多,例如,场地表面可能有纹路和不平整,边框上有裂缝,光照条件有变化等等。
参赛队在设计机器人时应考虑各种应对措施。
2021年全国大学生数字冰壶人工智能挑战赛桌上冰壶比赛细则
2021年全国大学生数字冰壶人工智能挑战赛桌上冰壶比赛细则一、比赛赛制1 .初赛采取小组循环积分赛决定出线队伍,出线队伍两两对决比出冠亚军。
2 .每场比赛分为两局,每局双方各投6壶,共投12壶。
3 .局间休息五分钟,双方可调整程序。
4 .每场比赛每队有一次暂停机会,暂停两分钟双方调整程序。
二、比赛流程1.比赛开始前参赛队员将自己的机器人放入出发区,机器人的任何部分及其在地面的正投影不能超出出发区。
5 .启动前准备工作不超过5分钟,完成准备工作后,参赛队员应向裁判及时示意。
6 .正式比赛前双方各试投1壶,根据距离营垒中心点远近决定发壶次序:a.胜方可选择第一局先发壶或后发壶,负方可选择壶的颜色;b.第二局双方交换发壶次序,每方壶的颜色不变。
7 .参赛队伍将小车和壶摆放在出发区,在裁判给出“开始”启动命令后,通过在机器人摄像头前打绿旗子启动机器人。
8 .每次发壶必须在裁判开始命令后99秒内完成,倒计时结束后还未发壶视为放弃该次投壶机会。
9 .比赛以最终留在冰壶区域内的冰壶机器人分值最多者为获胜方,投掷在分值区外面不得分。
(可以把对方冰壶撞出得分区来减少对手的得分)10 每场比赛结束后,裁判记录场上状态,填写记分表。
参赛队员应确认自己的得分并签字,并将自己的机器人放回指定位置。
11 裁判或志愿者将场地恢复到启动前状态。
三、有效壶及无效壶判定规则1 .所有有效发壶必须经过起始点且壶身完全经过防守区前线。
2 .以下情况为无效壶,必须立即移离比赛场地,放置于目标营垒的底线外。
a,发壶前小车任意部位超过了起始线;b.发壶队员使用了对方的壶发壶,原本要发的壶为无效;c,投壶过程中小车任意部位进入了防守区;d.发出的壶没有进入防守区或大本营;e.发出的壶已出赛道但经碰撞后反弹回赛道内;四、计分规则当所有壶发出后,哪个颜色的壶最接近营垒中心点的一队获胜;胜方在营垒内的壶比对方更接近中心点的壶都计算分数,每壶一分;负方在该局得O分;最大比分为一局6分。
纳英特智能挑战赛—“九宫乐园”竞赛规则3

物品:长宽高为50*18*30(±2) mm的木质长方体,重量约18g,颜色 为两种,共5个,现场公布具体颜色 和摆放位置(每轮根据场地引导线上 指示灯摆放)。 任务描述:将该引导线上两种不同颜 色的物品(间距大于3cm)分拣于引 导线左右两侧(物品不能与引导线接 触且不能超出该单元格)。比赛前公 布分拣区域,正确1个得6分,错误不 得分。此任务总得分30分。该任务由 裁判手工评判完成情况并当场公布。
击球点:引导线上紫色的点。 球:采用标准高尔夫球,摆放于 击球点。 球瓶:5号电池6节,摆放位置见 左侧示意图(蓝色灯位置)。 任务:机器人通过球击打球瓶, 每打倒一个球瓶得5分。此任务 总得分30分。机器人任何情况下 不能直接触碰球瓶,如有接触该 任务得分为0。 该任务由裁判手工评判完成情况 并当场公布。
前两轮比赛必须有一次成功灭火,如 果前两次失败,将没有资格参加第三轮的 比赛。
机器人灭火
规 则 简 介
标准模式 声音启动模式
任意启动位置模式
灭火器模式 衣帽架模式 变门模式
回家模式
家具模式 非平坦地面模式 火焰位置模式
机器人灭火
规 则 简 介 房间系数:
蜡烛在所搜索的第1个房间,房间系数为1.0 蜡烛在所搜索的第2个房间,房间系数为0.85 蜡烛在所搜索的第3个房间,房间系数为0.50 蜡烛在所搜索的第4个房间,房间系数为0.35
石头剪子布:长宽高为50*18*30(±2) mm的长方体,橙色为剪子,蓝色为布, 黄色为石头,上面贴有相应标识但摆放时 不影响机器人检测。 任务描述:场地上有石头、剪子、布三种 道具,摆放位置见左侧示意图,可能出现 相同道具(每轮根据场地引导线上指示灯 摆放),机器人经过该单元格时需根据场 地上摆放的拳法通过标准指令格式发送对 应的拳法到竞赛管理计算机上战胜对方。 每战胜一次得10分。此任务总得分30分。 指令标准格式:[猜拳:布剪子石头] 且机 器人LED屏幕上显示并保留该字符(便于 裁判评分时确认)。
Bransist Safire HC9操作指南PPT精品课程课件讲义

•射 频
•采 集 模 式 选 择
•心 脏
•下 肢
膝关节RSM-DSA
•脑 部
•腹 部
•旋 转
DSA
• 3D
CTAP:经动脉门静脉造影 CTA CBCT:锥形束CT
• 3D
校 正
侧框菜单1工具-2程序-3透视-4检查-5图像
一.工具
• 分屏显示 多幅显示 • 计时器 • 添加打印 打印设置 • 配置 功能键
C型臂 管球散热 电源 DC PCU
高压
第2柜 平板散热
三.控制室
• DAR-9400主机 • 采集屏
• 参考屏
• 鼠键 • 高压控制面板 • 缩光器遥控台 • 脚闸开关 • 对讲机
参考屏主界面
患者信息登录
复查患者登录
患者信息确认
•透 视 模 式 选 择
•心 脏
•脑 部
•腹 部
•下 肢
2.LV左心室分析
a.校正 (球)
.
b.舒张收缩
期 轮廓(RAO30)
.
c.分析 结果
(RAO30)
.
d.舒张收缩
期 轮廓(LAO60)
.
e.分析结果
(RAO30+LAO60)
3.Abc图像注释、距离测量
• •
箭头(长度 大小 方向 亮度)
字符(大小 字体 亮度)
•
.
患者信息 study
打印图像添加患者信息
4.Save 屏存 5.Export 导出 6.DSA 数字减影工具
Substract:
减影像←→骨像
7.FPD平板校正
1.PARK位 2.右推白钮拆下滤线栅 (9英寸FPD) 3.最大透视视野内无异物 4.选择Full-All Modes 5.Calibrate
RCTF机器人挑战赛竞赛规则

RCTF机器人挑战赛竞赛规则1.比赛主题时至今日,我们已经在地球上开发了许多能源,举一些简单的例子来说如太阳能、海潮、地热等等,而这些都是取之不尽,用之不竭的能源。
为了开辟更广阔的能源利用领域,科学家们已经开始探测地球以外宇宙中其他的星球,开发太空中可能蕴藏着的丰富能源。
科技发展到今天,我们已经可以利用人造卫星和火箭、太空船等特殊交通工具支太空进行探险。
宇宙的神奇之处就在于它的范围广阔,无边无际,但它的构成物质却如原子一般,十分微小,甚至没有办法分割。
因此科学家们相信,宇宙中必定有很多的能源,有待我们去开发、寻找。
人类已经迈出了到其他星球去寻找新能源的脚步。
人们坚信在不久的将来,人类也定能登上离地球更遥远的星球,并找到理想而可开发的新能源。
本届向未来机器人挑战赛的主题为“太空能源采集”。
在比赛中,各队选手要在规定的时间内设计和制作机器人来完成采集太空能源任务。
2.比赛场地比赛场地由地图和任务模型组成,如图 1。
图1:比赛场地图2.1地图地图为一张尺寸为2350×1360mm的彩色喷绘布。
地图上有一个基地区(蓝色正方形),不规则分布着有白色引导线的通道和几个资源区,如图 1所示。
(1)基地区:基地区是一个边长为 300mm的红色正方形区域。
它是机器人启动和修整的区域。
比赛开始后机器人由此处出发前往各个任务区域,也可进入该区域调整机器人后重新启动。
(2)能源矿:放置有能源球。
机器人需前往该区域获得能源球,并投送至对应的任务位置。
(3)通道:通道是 240mm宽黑色带状“道路”,道路中央印有 30mm宽的白色引导线。
(4)能源球:彩色球体,高尔夫球大小,EVA材料。
(5)通道:通道是 240mm宽黑色带状“道路”,道路中央印有 30mm宽的白色引导线。
(6)能源球:彩色球体,高尔夫球大小,EVA材料。
2.2赛场环境(1)比赛现场提供当地市电标准接口。
如果参赛队需要任何电压或者频率的转换器,请自行准备。
WER2019赛季人工智能竞赛电教能力挑战赛规则讲解
关于分离策略物与重启得分
二层“基地”
竞赛场地
二层:204*116cm
一层:240*210cm
一层“基地”
斜坡:42*140cm
横杆下沿距离地面的垂直高度34±0.5cm
竞赛场地
场地一层尺寸:240cm*210cm 场地二层尺寸:204cm*116cm 斜坡:42cm*140cm 一层基地尺寸:30cm*30cm 二层基地尺寸:64cm*40cm
二层基地
一层基地
竞赛场地与环境
1. 预设比赛任务:15个 2. 场地任务模型:15个 3. 模型位置:5个是固定的,其 他位置由现场给出(详见规则) 4. 附加任务:100分/个(得分 标准详见规则)
场地任务总成
任务一:组装机器人
移动底盘
一层操作台 控制核心
二层操作台 组装机器人模型初始状态图
组装机器人模型固定在场地上,机器人的控制核心 和移动底盘分离,如图所示。
机器人必须将信息匹配模 型转至工作状态(插头与插座 接触)且将信息读取任务中获 得的信息吸附在信息吸附处进 行匹配,并保持到比赛结束, 在低难度得分基础上,每个信 息可加得30分。(高难度得分
信息匹配任务完成状态图
任务3:信息匹配-运
任务3:信息匹配-转
任务3:信息匹配-匹配
任务四:概率模型
机器人需触发拨动装置,使数据经过筛选器落入地址内,落 入左右地址得50分,落入中间地址的80分。
数据 拨动装置
左地址
筛选器
中间地址
右地址
概率模型初始状态图
概率模型任务完成状态图
任务模型的初始状态:概率模型固定在二层场地上,数据位于拨动装置里面。
任务4:概率模型
任务五:信息选型
第十八届中小学电脑制作活动指南
第十八届“中国移动‘和教育’杯”全国中小学电脑制作活动指南全国中小学电脑制作活动组织委员会编二○一六年十二月目录一、人员范围二、项目设置三、“评选项目”项目设置、相关要求、评比指标及办法四、“创客项目”项目设置、相关要求、评比指标及办法五、“竞赛项目”项目设置、竞赛规则及有关要求六、奖项设置七、组织工作附表1:“评选项目”、“创客项目”省级推荐作品名单附表2:“评选项目”、“创客项目”推荐作品登记表附表3:“评选项目”、“创客项目”作品创作说明附表4:“评选项目”、“创客项目”各省组织单位、联系人信息表附表5:“评选项目”、“创客项目”省级评委推荐表附表6:“竞赛项目”参赛名单附表7:“竞赛项目”(组队)报名表附表8:“竞赛项目”各省组织单位、联系人信息表附件1:电脑艺术设计项目作品形态界定的补充说明附件2:机器人灭火竞赛规则附件3:机器人足球竞赛规则附件4:机器人篮球竞赛规则附件5:人型机器人全能挑战赛竞赛规则附件6:能力风暴WER能力挑战赛——“工业时代”竞赛规则附件7:纳英特智能挑战赛——“九宫医疗”竞赛规则附件8:BotBall——“未来农业”竞赛规则附件9:西觅亚FLL工程挑战赛——“动物之友”竞赛规则附件10:中鸣超级轨迹赛竞赛规则附件11:通用附则一、人员范围全国中小学电脑制作活动(简称“电脑活动”)的人员范围是:全国小学、初中、高中(中职)在校学生。
二、项目设置本届电脑活动内容分为“评选项目”、“创客项目”和“竞赛项目”。
三、“评选项目”项目设置、相关要求、评比指标及办法“评选项目”是指使用计算机创作、设计、制作的数字化作品。
(一)项目设置小学组:1.电脑绘画2.电脑绘画(“和教育”专项)3.电子板报4.网页设计5.电脑动画6.电脑动画(健康教育专项)7.微视频(英语数码故事创作)8.计算机程序设计(创意编程)初中组:1.电脑绘画2.电脑绘画(“和教育”专项)3.网页设计4.电脑动画5.电脑动画(健康教育专项)6.电脑动画(“和教育”手机动漫)7.3D创意设计(创新未来设计)8.3D创意设计(未来智造设计)9.微视频(英语数码故事创作)10.计算机程序设计(创意编程)普通高中组:1.电脑艺术设计2.网页设计3.电脑动画(二维)4.电脑动画(三维)5.电脑动画(健康教育专项)6.电脑动画(“和教育”手机动漫)7.3D 创意设计(创新未来设计)8.3D创意设计(未来智造设计)9.计算机程序设计10.微视频(微电影)中职组:1.电脑艺术设计2. 电脑动画(二维)3.电脑动画(三维)4.计算机程序设计(二)相关要求1.作品形态界定(1)电脑绘画①电脑绘画运用各类绘画软件或图形、图像处理软件制作完成的作品。
智能机器人走迷宫比赛规则_百度文库.
智能机器人走迷宫比赛规则一、任务制作一个由计算机程序控制的机器人, 在一间模拟平面结构的房间里运动,由“ H ”为起点访问指定房间。
二、标准1、模拟平面结构的房间和特性机器人走迷宫比赛的场地平面结构示意图见《规则附件》 ,最终比赛场地以当天现场提供为准。
示意图中的尺寸供练习和实践时参考, 竞赛场地的实际尺寸与示意图给定尺寸基本相同,但允许有 1cm 范围内制作误差。
模拟房间的墙壁 33cm 高,材质为木板。
墙壁为白色。
竞赛场地的地板为黑色的光滑木制表面。
地板可以有接口, 但接合处平整并是同样的黑色。
场地的平整度要求, 只要机器人可以处理 0.3cm 的不连续区域就可以。
竞赛场地模拟房间里整体地面是水平的, 没有斜坡和楼梯。
房子中,所有的走廊和门口宽都不小于 46cm 。
门口并没有门, 在地面上用一条2.5cm 宽的白线表示房间入口。
竞赛场地的地板是黑色的。
机器人将从示意图中一个标有“ H ”的正方形开始,代表起始位臵。
实际竞赛场地中代表起始位臵的白色正方形是实心的, 并不标记“ H ” 。
代表起始的位臵为 30cm ×30cm 边长的白色正方形,正方形的对角线交点将设在 46cm 走廊的纵向中心线上。
竞赛场地示意图中在代表起始位臵的正方形左侧的墙壁没有标注缺口。
竞赛场地这一部分墙壁可以移开, 让参赛者比较方便地设臵机器人。
机器人也可以用一些装臵来校正机器人在正方形中的位臵。
机器人必须在白色正方形中启动。
一旦启动, 它可以在比赛场地中向所希望的横向或纵向运动。
2、照明设备竞赛场地周围将尽量使用冷光源,且光线强度适中、均匀。
但最终照明等级在比赛时才能确定。
参赛者在比赛的当天有时间了解周围的灯光等级及标定机器人。
3、机器人机器人的整体外形尺寸限制在 30cm ×30cm ×30cm 之内,包括机器人的触角、探测物及装饰物。
机器人的重量、制作材料、产品型号等不作限制。
4、传感器在不违反其他规则和规范的情况下对传感器的型号没有限制。
2024WRO小学组常规赛中文版规则

2024WRO小学组常规赛中文版规则第一章:赛事概述1.1比赛目的2024WRO小学组常规赛是一项面向小学生的机器人竞赛,旨在培养小学生的动手能力、创新思维和团队合作精神。
1.2比赛时间比赛将根据具体场次进行安排,每场比赛时长为2小时。
具体比赛时间将提前通知参赛队伍。
1.3比赛地点比赛地点将根据具体场次进行安排,比赛场地将提供所需的基础设施和器材。
第二章:参赛队伍2.1参赛队伍组成参赛队伍由3-5名小学生组成,每队只能报名参加一场比赛。
2.2年级限制参赛队伍必须由小学一年级至小学六年级的学生组成。
2.3指导员要求每支参赛队伍需有一名指导员指导,并且指导员不能参与比赛。
指导员需具备相关知识和经验,以确保比赛的安全和公平。
第三章:机器人3.1机器人规格参赛队伍需自行设计和制作机器人。
机器人尺寸不得超过35cm×35cm×35cm,重量不得超过3kg。
机器人能源可以是电池或线缆供电,但必须具备自主移动能力。
3.2机器人性能要求机器人要能完成比赛中的任务,具备相应的传感器和执行器,以实现自主导航、目标识别和对象操作等功能。
3.3机器人控制系统机器人的控制系统应由队伍自行设计和编程。
可以使用各类编程语言和开发平台,如Arduino、Scratch等。
第四章:比赛内容4.1比赛任务比赛分为多个任务,包括导航任务、目标识别任务和对象操作任务。
参赛队伍需根据规定的任务设计和改进机器人,以在规定时间内完成任务。
4.2导航任务参赛队伍需使用机器人完成指定区域内的自主导航任务,包括路径规划和避障。
导航任务的具体细节将在比赛前公布。
4.3目标识别任务参赛队伍需使用机器人识别出特定形状和颜色的目标,并对目标进行准确的分类和定位。
目标识别任务的具体细节将在比赛前公布。
4.4对象操作任务参赛队伍需使用机器人完成将对象从一个位置搬运到另一个位置的任务。
对象操作任务的具体细节将在比赛前公布。
第五章:评分和排名5.1评分细则比赛将根据机器人的表现进行评分。
人工智能九宫格重移——搜索的实验报告
人工智能九宫格重移——搜索1.问题描述:八数码问题也称为九宫问题。
在3×3的棋盘,摆有八个棋子,每个棋子上标有1至8的某一数字,不同棋子上标的数字不相同。
棋盘上还有一个空格,与空格相邻的棋子可以移到空格中。
要求解决的问题是:给出一个初始状态和一个目标状态,找出一种从初始转变成目标状态的移动棋子步数最少的移动步骤。
所谓问题的一个状态就是棋子在棋盘上的一种摆法。
棋子移动后,状态就会发生改变。
解八数码问题实际上就是找出从初始状态到达目标状态所经过的一系列中间过渡状态。
2.九宫重移有无答案检查(逆序数)我们把每个9宫格横向展开,如第一个123456789,我们把左边数大于右边数的组数称为这个九宫格的逆序数,显然123456789的逆序数为0;考虑横向平移,那么逆序数的增量为2或0或-2;纵向平移,逆序数的增量为4或0或-4;但147258369的逆序数为奇数。
所以147258369是无解的情况。
由此也可以类推当将9宫格展开后,如果数据序列的逆序数为奇数,则此数据序列对应的九宫格是无解的。
3.BFS算法队列: Queue open = new Queue();存放待扩展的节点List: List<Bfstr> closed = new List<Bfstr>();存放已被扩展过的节点ArrayList map = new ArrayList();//存放答案HashTale: Hashtable table = new Hashtable();构造哈希表以方便查找3.1.BFS算法介绍广度优先搜索算法BFS基本思想:从图中某顶点v出发,逐层对节点进行拓展,并考察是否为目标节点,在第n层节点没有全部扩展并考察前,不对第n+1层节点进行扩展。
对九宫重排问题,即构造广度优先搜索树,从初始状态,利用广度优先搜索算法逐步找到目标状态的节点。
3.2.状态空间表示状态空间用一维数组表示,每个节点存放在Bfstr结构体中的字符now中,从第一行开始从左往右给九宫格标号0……8,字符串now元素下标代表格子位置,而now数组中对应数组的值代表九宫格中存放的数码,用数值9代表空格。
迷宫机器人比赛规则
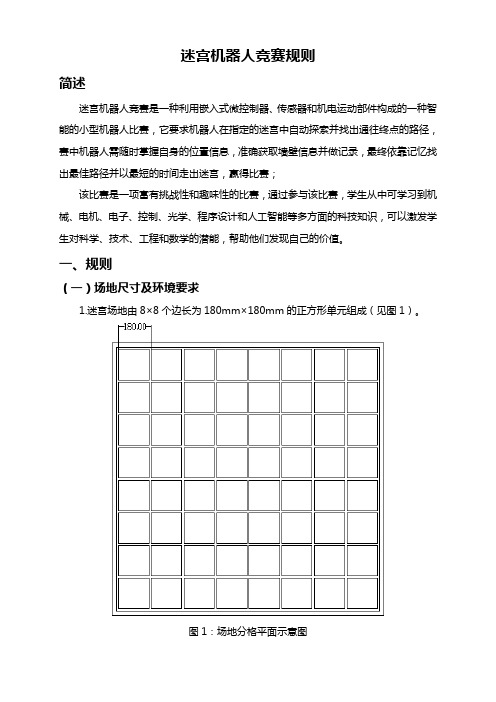
迷宫机器人竞赛规则简述迷宫机器人竞赛是一种利用嵌入式微控制器、传感器和机电运动部件构成的一种智能的小型机器人比赛,它要求机器人在指定的迷宫中自动探索并找出通往终点的路径,赛中机器人需随时掌握自身的位置信息,准确获取墙壁信息并做记录,最终依靠记忆找出最佳路径并以最短的时间走出迷宫,赢得比赛;该比赛是一项富有挑战性和趣味性的比赛,通过参与该比赛,学生从中可学习到机械、电机、电子、控制、光学、程序设计和人工智能等多方面的科技知识,可以激发学生对科学、技术、工程和数学的潜能,帮助他们发现自己的价值。
一、规则(一)场地尺寸及环境要求1.迷宫场地由8×8个边长为180mm×180mm的正方形单元组成(见图1)。
图1:场地分格平面示意图2.用于隔开每个单元格的围板称为墙壁,迷宫场地的墙壁高50mm,厚12mm,因此两堵隔墙所构成的通道其实际宽度为168mm(示例场地图见图2)图2 示例场地图3.四周的隔墙将整个迷宫封闭,迷宫隔墙的侧面为白色,顶部为红色。
迷宫的地面为木质,使用油漆漆成黑色。
迷宫地面上印有墙壁的定位线,作组装场地时定位墙壁的标记,隔墙侧面和顶部的涂料需能反射红外线,地板的涂料需能吸收红外线。
4.迷宫的起始单元必须有三面隔墙,余下一个出口。
例如,若没有隔墙的出口端为“北”向时,那么迷宫的外墙就构成“东”、“南”、“西”方位的隔墙。
5. 符合本规则的迷宫场地设计方案数量众多,但迷宫的格数始终是8×8格,四边的围墙不变,变化的是围墙内部的各个墙壁,每届比赛具体使用哪种方案,由组委会确定,并于赛前公布。
6.迷宫场地中,将每个正方形单元的四角每两边相交的位置的点我们定义为“格点”。
除了停泊区域中心的格点外,其余每个格点至少要延伸出一面隔墙或与一面隔墙相接触。
由格点延伸出去的墙壁的组合方式多种多样,以迷宫左下角的一个格点为例,如下图中黑色部分为格点,示例场地图见图2A、从格点处延伸出一块墙壁后,与该节点有关的墙壁的几种布置位置如下:B、从格点处延伸出两块墙壁后,与该节点有关的墙壁的几种布置位置如下:C、从格点处延伸出三块墙壁后,与该节点有关的墙壁的几种布置位置如下:7. 竞赛结束时迷宫机器人的停泊区域设在迷宫中的唯一的一个没有墙壁延伸的格点的四格中,具体入口位置比赛现场公布,示例图见图3:停泊区图3 示例场地图(右边为底板及隔墙高度)8.迷宫场地制作的尺寸精度误差应不大于5%,或小于2cm。
九宫IER智能挑战赛—“九宫联运”竞赛规则
九宫(IER )智能挑战赛一〃九宫联运"竞赛规则一、任务简述参赛选手通过现场搭建、修改调试程序,在两套拼接的“九宫"场地中使用各自的两台机器人,联合来完成一系列模拟智能运输能源的任务。
参与竞赛的过程中,选手不仅学会机器人的搭建方法、调试过程及控制原理,同时也使机器人成为他们共同成长的伙伴。
这既是本届九宫智能挑战赛的任务,也是国际教育机器人联盟(IER)倡导的基本理念。
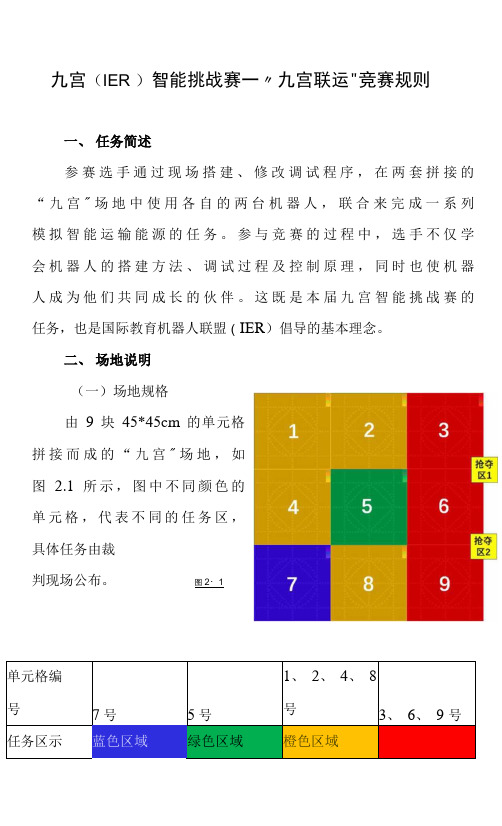
二、场地说明(一)场地规格由9块45*45cm的单元格拼接而成的“九宫"场地,如图 2.1所示,图中不同颜色的单元格,代表不同的任务区,具体任务由裁判现场公布。
图2・1单元格编号7号5号1、2、4、8号3、6、9 号任务区示蓝色区域绿色区域橙色区域初始状态 完成状态 ___________ 任务说明:打开“拨杆”,转动“手柄”,将3 个“绿色能量块”从“能源架"中取出,机器人 携带能量块离开(垂直投影)此单元格。
计分说明:此任务计55分。
评分说明:打开“拨杆”计10分,从“能源架"中取出“绿色能量块"且离开此单元格,计 15分/个,若掉落则该块能量不计分(离开此单元 格后掉落不影响该任务计分)。
道具位置:“能源架”位置如下图所示,以红 色引导线为中心线放置,底座与长边红色引导线 齐平,“绿色能量块"出口方向朝蓝点方向。
(“能 源架"需双面胶固定在场地上)。
取新型能源的数字,根据“运送规则”将各种能量块运送至 对应的“能源分类库”中,机器人运行后,裁判 随机抽选卡片放入“能源站"且选手不得以任何 方式干预机器人,“能源站”的位置由裁判抽签决 定。
运送规则:小学组:识别1个卡片,根据识别结果将第一 次取得的能量块运送至对应的“能源分区”内,高级任务能 源 运 输 任务过程:打开“拨杆”,转动“手柄",取 出“绿色能量块"。
任务说明:机器人需识别“能源站"上卡片若数字为“1",则运送至“第一能源区",同理,若数字为“2”或“3"时,分别放置在“第二能源区''或“第三能源区",后面取得的能量块只需将同颜色的能量块放入同一个“能源分区"即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附件7
纳英特IER 智能挑战赛——“九宫医疗”竞赛规则
一、任务简述
参赛的双方选手通过现场搭建、修改调试程序,在两片拼接的“九宫”场地中使用各自的两台机器人,完成一系列模拟“医院”中部分医疗场景的任务。
参与竞赛的过程中,选手不仅学会机器人的搭建方法、调试过程及控制原理,同时也使机器人成为他们共同成长的伙伴。
这既是本届智能挑战赛的任务,也是国际教育机器人联盟(IER )倡导的基本理念。
二、场地说明
2.1 场地规格
由9块45*45cm 的单元格拼接而成的“九宫”场地,如图2-1所示,图中单元格的不同颜色,代表初级、中级和高级这三种不同的任务,任务的具体位置在现场由裁判公布。
图2-1
为了缩短比赛进行的时间并在比赛中增加一定的对抗竞争性,实际比赛时,每次都有两队同时进行比赛,赛场将由两片“九宫”场地拼接而成,如下图2-2所示,分为左半部
分和右半部分,两部分所布置的任务完全相同,但在两片场
地的拼接处有一个急救任务,该任务在比赛时由两队争抢完成。
两队的机器人只能在自己所在“九宫”场地做任务,机器人驱动轮越过自己所在“九宫”场地,则由裁判提示选手移开此机器人,不再上场。
各部分所使用的单元格总任务超过9个,现场经裁判使用“九宫竞赛管理”计算机选择9个任务拼接而成。
2.3 起始区(终点区)
起始区(终点区)位于整个赛场四角单元格的最外侧四分之一区域,即图2-3中的蓝色区域,左半部分和右半部分都有两个起始区可以选择,现场由裁判决定并公布双方起始区(
图2-3
2.4 场地编号标准
场地单元格上的箭头标识朝一个方向,以场地箭头方向开始,按从左往右,从上往下的顺序对单元格进行编号依次为1-9,如图2-4示。
编号顺序和机器人完成任务的先后顺序无关。
图2-4
2.5 引导线
引导线所组成的图案即机器人寻迹的路线,使用Φ5 RGB全彩灯形成,采用RGB三种颜色任意组合,选手在现场根据实际情况对机器人进行调试,以完成所要求的任务。
机器人在执行未经说明可脱线的任务过程中其垂直投影应始终在引导线上方。
引导线两侧可能有装饰图案,但不会影响到机器人识别引导线。
2.6 环境条件
比赛场地尽可能为冷光源,低照度,低磁场干扰,引导线会根据现场环境调节亮度,场地尽可能保持平整。
由于单元格拼接时存在误差,可能会有一定偏差和间隙,参赛选手应考虑比赛现场存在各种实际情况的可能性,具备适应比赛现场的能力。
三、机器人与系统环境
3.1 机器人尺寸与规格
机器人最大尺寸:静止状态下长和宽的垂直投影不超过单元格的四分之一,机器人重量(含电池)不超过1.5千克。
3.2 机器人设计要求
3.2.1. 限定使用1个可编程处理器,驱动电机不超过2个(6V电压下,转速不超过300转/分钟)。
3.2.2. 机器人不限传感器个数及种类,机器人配置无线蓝牙功能,以便与九宫竞赛管理计算机进行通讯。
3.2.3. 根据机器人电源连接方式不同(串联或并联),一台机器人使用的所有电源的总输出不得超过9V。
3.2.
4. 正式比赛时两名选手各使用一台机器人参赛,可相互协助。
中途不能更换机器人,可允许携带备用零部件(非整机)对机器人在不更换机架的前提下进行维护。
3.3 系统环境
采用《九宫竞赛管理软件》,用于竞赛的自动计时及评分。
由系统发出指令,开始自动计时,机器人到达终点发出指令则计时结束。
裁判根据选手完成任务的实际情况,在竞赛管理计算机上记录选手成绩,并显示参赛队伍最终成绩。
四、任务模块
初级任务区类似下方图形,于比赛现场由裁判使用竞赛管理计算机确认生成。
机器人从一个路口进入,沿引导线行走,
个任意路口走出任务模块。
成功走出一个任务区得20分,同一单元格重复走不加分。
任务描述:将患者送进拍摄仓内,且不能对拍摄仓造成太大冲撞(拍摄仓在蓝点范围内即可)。
道具请参考4.2任务道具说明。
拍摄仓:放于图中蓝点范围内(上面的框)。
患者:为1个黄色木块,放于图中黄圈
任务描述:将输液瓶挂到挂钩上,且挂杆保持直立。
道具请参考4.2任务道具说明。
挂杆:放于图中蓝点范围内。
挂钩的朝向:小学组挂钩朝向输液瓶,初中组挂钩与输液瓶成
输液瓶:放于图中黄圈蓝点范围内。
任务描述:在急救中心黄色区域放有3个急救包,如下图所示,双方机器人采取竞争夺取的方式取得急救包。
其中红色为高级黄色为普通急救包。
道具请参考4.2
任务道具说明
图例
五、竞赛流程
5.1 编程、调试
待参赛选手进入封闭的比赛场地后,由裁判启动《九宫竞赛管理软件》设计任务场地并公布,选手在接下来的150分钟内现场独立搭建、修改程序、调试机器人。
5.2 赛制流程
比赛以抽签的方式决定各参赛队的的对手,赛前根据各参赛队的队伍编号分别将队伍编为1、2、3……号,选手在调试比赛前进行两次抽签,决定两轮比赛的对手,签的个数为队伍总数,各参赛队抽签时会去掉与自己队伍编号一致的号码及已经抽取的号码,比赛时,按照抽签的顺序决定出场的次序。
5.3 启动
每场有两支队伍比赛,双方选手使用自己队伍的机器人,分别为1号和2号(选手自行定义),双方的队员以“争抢”的模式进行比赛。
双方1号机器人在“起始区”内待命并与“九宫竞赛管理软件”计算机进行通讯,由计算机发出开始指令后,计时开始,同时1号机器人自动开始运行。
若机器人不运行则改由手工
启动,评分由裁判手工评分,则该轮比赛得分系数为手工启动系数。
2号机器人在1号机器人离开“起始区”后(1号机器人的垂直投影完全离开起始区)可放入场地,手动运行即可。
5.4 结束
1号机器人抵达终点区(不包括做急救任务时机器人返回起始区),则该轮比赛结束,计时停止。
而另一台机器人尚未完成任务,则计算已完成的任务总分。
比赛过程中,在未说明可以脱线行走的任务区进行脱线行驶则任务失败且该机器人比赛提前结束,之前得分有效,另一台机器人可继续完成任务。
在任务执行过程中,未经裁判允许参赛队员接触机器人,则该轮比赛终止,已完成任务的得分有效。
每轮最长计时3分钟,超过3分钟则任务结束,之前得分有效。
5.5 合作奖励
双方选手的1号和2号机器人都参与比赛:
1.每个机器人都做3个任务以上,总分加30分。
2.每个机器人都完成3个任务以上,总分加40分。
3.否则不加分。
5.6 重试
比赛过程中,每台机器人有1次重试的机会,启用重试之后,之前得分有效,但再次重试之前做过的任务,得分按重试之后的计算,且重试时机器人必须拿回起点,从起点重新启动,期间计时不停止。
如果机器人没有重试,所有任务(不包含急救任务)都完成(每个任务得满分) ,顺利返回,且拿到至少一个急救包,则加流畅分30分。
5.7 处罚
故意破坏场地者将取消比赛资格。
六、评分标准
每组参赛选手有两轮比赛机会(两轮比赛场地一致),每场比赛,均按赛场上的实际状态记录成绩,由竞赛管理计算机统计得分,得分精确到0.1分。
6.1 得分
得分系数:使用《九宫竞赛管理软件》启动机器人得分系数为1.2,人工手动启动机器人得分系数为1.0。
扣分:比赛期间应保持“患者”与“医疗器械”的相对完整。
若损坏道具或将道具移至该任务模块之外,则该任务不得分,且从该轮任务总分中扣除10分。
任务总分= 各个任务分值之和- 扣分。
单轮成绩= 得分系数×任务总分。
总得分为两轮成绩之和。
6.2 成绩评判
总得分高者排名靠前,总得分相同时以最好的单轮成绩高者排名靠前,两者均相同时以最好的单轮成绩时间短者排名靠前。
6.3 其它
比赛期间,凡是规则中没有说明的事项由裁判委员会决定。
竞赛组委会委托裁判委员会对此规则进行解释与修改,在竞赛中,裁判有最终裁定权,他们的裁决是最终裁决。
七、通用附则(见附件11)
附录:
成绩统计表(小学组)
参赛队:日期:年月日
关于取消比赛资格的记录:
原因:
裁判员:记分员:
参赛队员:参赛队员:
裁判长:数据录入:
成绩统计表(中学组)
参赛队:日期:年月日
关于取消比赛资格的记录:
原因:
裁判员:记分员:
参赛队员:参赛队员:
裁判长:数据录入:。