控制基础-非线性系统动力学动力学
系统动力学
具体来说,辅助方程是速率方程的子方程,用于计算 辅助变量的取值,可以使决策者更加清楚地了解决策 的过程。
编辑ppt
27
⑷常量方程
简单数来,常量方程就是给常量赋值:
Ci=Ni Ci:常数名称 Ni:常数值
支。
等。
编辑ppt
7
2.系统动力学的原理
系统动力学是在系统论的基础上发展起来的,认为系统的结 构决定了系统的行为。系统内的众多变量在它们相互作用 的反馈环里有因果联系。
人们在求解问题时都是想获得较优的解决方案,能够得到较 优的结果。所以系统动力学解决问题的过程实质上也是寻 优过程,来获得较优的系统功能。因此系统动力学是通过 寻找系统的较优结构,来获得较优的系统行为。
1990-广泛应用与传播
第五项修炼——学习型组织
中国的系统动力学发展
杨通谊教授 王其藩教授 许庆瑞教授
编辑ppt
5
Contents
1 2 3 4 5
系统动力学发展历程 系统动力学的原理 系统动力学基本概念 系统动力学分析问题的步骤 系统动力学实际案例
编辑ppt
6
2、系统动力学的基本原理
注意:(1)常量方程中不能出现时间下标 (2)常量可以依赖于其他常量。
⑸初值方程
初值方程是给状态变量方程或者是某些需要计 算的常数赋予最初的值。
Li=Mi
Li:初始值名称
Mi:初始的数值
注意:(1)赋值方程中不能出现时间下标 (2)模型中每一个状态变量方程都必须赋予初始值, 因此每个L方程后都必须跟随一个N方程
政策分析与模型使用
修改模型
编辑ppt
非线性控制理论和应用

非线性控制理论和应用随着科技的不断发展,越来越多的控制系统被广泛应用于各个领域中。
然而,由于受到噪声、非线性和随机干扰等因素的影响,传统的线性控制理论往往难以达到理想的控制效果。
这时,非线性控制理论应运而生。
一、非线性控制理论的概念非线性控制理论是一种研究非线性动态系统及其控制方法的学科,主要是针对那些包含了非线性部件的系统。
非线性控制理论的基本思路是,将非线性系统用一定的方法转化为线性系统,然后采用线性控制理论进行控制。
二、非线性控制理论的基础理论1. 相空间理论相空间理论是非线性控制理论的重要基础理论之一,它主要用于研究相空间中的轨迹和性质,从而揭示系统的稳定性和瓶颈等问题。
2. 动态系统理论动态系统理论是非线性控制理论的又一基础理论,它主要利用微积分和拓扑学等数学工具,研究非线性动态系统的演化规律及其稳定性,探究系统在不同条件下的响应和控制方法。
3. 控制系统理论控制系统理论是非线性控制理论的重要组成部分,它关注于系统的变量调节、物理平衡及时效性等问题,并针对系统的不确定性和复杂性提出了一系列控制方法和设计思路。
三、非线性控制理论的应用领域1. 机械制造领域在机械制造领域中,非线性控制理论可被广泛应用于惯性系统、转子系统、液力机械系统等机械控制领域,以解决由于物理系统不确定性、非线性特性和高复杂度而导致的控制问题。
2. 航空航天领域在航空航天领域中,非线性控制理论可用于飞行器的姿态控制、飞行轨迹规划和姿态稳定等控制问题,以确保飞行器飞行的安全性和准确性。
3. 化工领域在化工领域中,非线性控制理论被广泛应用于化学反应动力学、过程控制、催化反应、流量控制、质量传递和传热控制等方面,以提高生产效率和产品质量。
4. 供水净化领域在供水净化领域中,非线性控制理论可用于控制水处理设备的进、出水流量,以确保水的净化度和供水量的稳定性。
四、非线性控制理论的未来发展随着科技的不断进步和人们的需求日益增长,非线性控制理论仍有着广阔的发展前景。
非线性系统知识点总结

非线性系统知识点总结一、引言随着科学技术的发展,非线性系统在各个领域中扮演着愈发重要的角色,例如控制工程、经济学、生物学、化学等。
非线性系统的特点是其响应与输入之间不满足线性叠加原理,因此其动力学行为十分复杂。
在探究非线性系统的特性和行为规律中,需要深入研究和掌握一系列知识点。
本文将以非线性系统为基础,对其相关知识点进行总结和梳理,以期为相关研究提供一定的指导方向。
二、非线性系统的基本概念1. 线性系统与非线性系统在探究非线性系统之前,首先需要了解线性系统与非线性系统的区别与联系。
线性系统具有叠加性质,即输入信号的线性组合对应于输出信号的线性组合。
而非线性系统则不满足该叠加性质。
从数学上来说,线性系统的方程能够表示为一阶线性微分方程,即具有线性的数学形式,而非线性系统的方程则是包含非线性项的微分方程。
2. 非线性系统的特点非线性系统具有复杂的行为特性,其主要特点包括:不可分解性、不确定性、多稳态性、随机性等。
非线性系统在实际应用中往往表现出多样化的动力学行为,对于系统的建模和分析提出了更高的要求。
三、非线性系统的数学描述1. 非线性方程非线性系统的数学描述通常采用非线性微分方程来进行表达。
非线性微分方程一般具有如下形式:\[ \frac{dx}{dt} = f(x(t), t) \]其中 \( x(t) \) 表示系统的状态变量,\( t \) 表示时间,\( f(x(t), t) \) 表示系统的非线性函数。
非线性微分方程的求解往往需要借助于数值方法,例如Euler法、Runge-Kutta法等。
2. 非线性系统的相空间描述相空间描述是研究非线性系统动力学行为的重要方法之一。
通过将系统的状态变量表示为相空间中的点,可以直观地展现系统的动态特性。
非线性系统的相空间可能包括多个稳态点、极限环、混沌吸引子等复杂结构。
3. 非线性系统的周期轨道对于某些非线性系统,其动力学行为可能出现周期轨道。
周期轨道是指系统状态在相空间中呈现周期性变化的轨迹,通常通过极限环的存在来描述。
控制基本模型-概述说明以及解释
控制基本模型-概述说明以及解释1.引言1.1 概述概述在控制理论和应用中,控制基本模型是指用于描述和分析控制系统的数学模型。
控制基本模型是控制工程师和研究人员研究和设计控制系统时的基础,它提供了系统动力学行为的描述以及控制方法的分析和设计。
控制基本模型可以采用多种形式,包括传递函数模型、状态空间模型和输入-输出模型等。
这些模型通常基于系统动力学方程和输出-输入关系来建立。
通过对模型进行数学分析和仿真实验,我们可以深入了解和预测控制系统的行为,并针对不同的应用需求进行优化设计。
本文将重点介绍控制基本模型的定义和控制方法的介绍。
首先,我们将详细讨论基本模型的定义,包括传递函数模型、状态空间模型和输入-输出模型的基本原理和特点。
然后,我们将介绍一些常用的控制方法,如比例积分微分控制(PID控制),模糊控制和自适应控制等。
这些控制方法可以根据系统的需求和特点来选择和应用。
通过本文的学习,读者将能够理解和掌握控制基本模型的概念和基本原理,了解不同类型的控制方法的适用范围和特点。
同时,读者还将能够应用所学知识来设计和优化控制系统,提高系统的性能和稳定性。
总之,控制基本模型是控制系统设计和分析的基础,具有重要的理论和实际意义。
通过研究和应用控制基本模型,我们可以不断改进和优化控制系统,提高系统的性能和效果。
1.2文章结构1.2 文章结构本文的目的是探讨控制基本模型,并介绍相关的控制方法。
为了更好地组织本文的内容,文章结构如下所示:引言部分将在1.1概述中简要介绍控制基本模型的背景和意义,并在1.3目的中明确阐述本文的研究目标。
正文部分将分为两个小节进行讲解。
首先,在2.1基本模型定义中,我们将详细阐述控制基本模型的定义和内容,包括其在控制系统中的作用和应用领域。
其次,在2.2控制方法介绍中,我们将介绍几种常见的控制方法,包括PID控制器、模糊控制和神经网络控制等,以及它们在控制基本模型中的应用。
结论部分将在3.1总结中对本文进行总结,回顾并强调本文的重点内容和研究成果。
控制工程基础第二章——数学模型
② 脉冲函数: 脉动函数的极限,t0看作变量。
A
fT
(t)
lim
t0 0
t0
d [ A(1 et0s )]
L[
fT
(t
)]
lim
t0 0
A t0s
(1
et0s
)
lim t0 0
dt0
d dt0
(t0 s )
As A s
单位脉冲(Dirac) 定义:
面积为1的脉冲函数
(t)dt 1, (t 0, (t) 0)
fi (t)
此式为二阶常系 数线性微分方程。
系统的数学模型可用方块图表示:
方块图描述了系统
中信号转换、传递的 过程,给出了系统的 工作原理。
☆ 举例2:电网络系统
设输入端电压ui(t)为系统输入量。电容器c两端电压uo(t)为系统输
出量。现研究输入电压ui(t)和输出电压 uo(t)之间的关系。电路中的
.
(n)
x(t) sX (s) x (t) s n X (s)
x(t)dt
1 sn
X
(s)
①平移函数、延迟函数
对于函数 f (t) 函数 f (t )
称为延迟函数,函数本身并
不发生改变,只是延迟α时
间才发生。
注意:t 时,函数 f (t ) 0
②延迟定理
若 f (t) F (s) 则有 f (t ) es F (s) 延迟函数的拉氏变换 原函数的拉氏变换乘以 es
显然 (t) 1, A (t) A
结论:脉冲函数是面积函数; 脉冲函数的拉氏变换就是脉冲下的面积。 换言之,复数域中的实数在时域里是脉冲函数。
☆ 关于单位脉冲函数的说明
《控制工程基础》第二章
第二章 系统的数学模型
2.2 系统的微分方程
例2-6 下图所示为一电网络系统,其输入为电压u(t), 输出为电容器的电量q(t),列写该系统微分方程。
L
R
解:根据克希荷夫电压定律,得
u
i
C
u(t)Ldd(ti)tR(ti)C 1i(t)dt
∵
i(t) dq(t) dt
消去中间变量i(t),并整理得,
轴平移了时间T。 例 求f(t)= 1 - 1 1(t-T)的拉氏变换
TT
4. 微分定理
若L[f(t)]=F(s),则有L[ df ( t ) ]=s F(s) - f(0)
初始状态为0时,L[
d
n
d
f
n
( t
t
)
dt
]=
s
n
F(s)
第二章 系统的数学模型 2.3 拉氏变换与拉氏反变换
5. 积分定理
解: 1)明确系统的输入与输出,
f( t) k
输入—f(t) , 输出—x(t)
m
2)进行受力分析,列写微分方程,
cx ( t) f(t) kx(t) 利用 Fma,得
图2-1
பைடு நூலகம்
m f( t ) k ( t ) x c x ( t ) m x ( t )
c· x(t)
3)整理微分方程,得
m x ( t ) c x ( t ) k ( t ) x f ( t )
本章教学大纲
1. 掌握机械、电气系统微分方程的建立方法; 2. 了解非线性方程的线性化; 3. 熟悉拉氏变换及反变换、线性定常微分方程的解法; 4. 掌握传递函数基本概念及典型环节传递函数; 5. 掌握系统传递函数方框图的化简。 教学重点:微分方程建立、传递函数概念与求法、典
机械工程控制基础-机控复习考试资料
X i X 01. 什么是系统的反馈?一个系统的输出,部分或全部地被反过来用于控制系统的输入。
2. 一个系统的动力学方程可以写成微分方程,这一事实就揭示了系统本身状态变量之间的联系,也就体现了系统本身存在着反馈;而微分方程的解就体现了由于系统本身反馈的存在与外界对系统的作用的存在而决定的系统的动态历程。
3. 几何判据有奈奎斯特判据、波德判据两种;代数判据有劳斯判据、胡尔维茨判据两种。
4. 列写微分方程的步骤:(1).确定系统或各元素的输入量输出量(2).按照信号的传递顺序,从系统的输入端开始,根据各变量所遵循的运动规律列写出在运动过程中的各个环节的动态微分方程 (3).消除所列各微分方程的中间变量,得到描述系统的输入量输出量之间的关系的微分方程。
(4).整理所得微分方程。
5. 非线性系统有:本质非线性和非本质非线性两种,能进行线性化的是非本质非线性系统。
6. 给出两种传递函数的定义:1.传递函数是经典控制理论中对线性系统进行研究分析与综合的基本数学工具 2.在外界输入作用前,输入输出的初始条件为零时,线性定常系统环节或元件的输出 (t )与输入 (t )经Laplace 变换后 与 之比称为该系统环节或元件的传递函数。
7. 写出六种典型环节的名称、微分方程和传递函数、奈奎斯特图和波德图。
8. 方框图的基本元素由传递函数方框、相加点、分支点组成。
9. 二阶系统时间响应的性能指标是根据欠阻尼二阶系统在单位阶跃信号作用下得到的。
10. 系统稳定的充要条件是:系统所有特征根的实部为负。
11. 什么是系统的动柔度、动刚度、静刚度。
若机械系统输入为力,输出为位移(变形)则机械系统的频率特性就是机械系统的动柔度;机械系统的频率特性的倒数就是机械系统的动刚度;当W=0时系统频率特性的倒数为系统的静刚度12. 线性定常系统对谐波输入的稳态响应称为频率响应。
13. 相频特性和幅频特性的定义:相频特性是指:稳态输出信号与输入信号的相位差;幅频特性是指:稳态输出与输入的幅值之比。
非线性动力学理论在化学反应过程中的应用研究

非线性动力学理论在化学反应过程中的应用研究随着科学技术的不断进步,人们对于自然世界的认识也越来越深刻。
化学反应作为自然界中最普遍的过程之一,其研究也成为了日益发展的重要领域之一。
而非线性动力学理论作为一种重要的数学和物理学方法,已经被越来越多地应用到了化学反应过程中。
本文将从非线性动力学理论的基本特征、化学反应动力学的基础知识入手,探究非线性动力学理论在化学反应过程中的应用研究,并展望未来这一领域的发展趋势。
一、非线性动力学理论的基本特征非线性动力学理论研究的是非线性系统,而非线性系统与线性的系统有着显著的区别。
从宏观上来看,线性系统的行为是无限制的,呈现出确定性和可预测性;而非线性系统则呈现出了复杂性、不确定性和不可预测性。
而从微观上来看,非线性系统的行为是呈现出非周期性、周期性、混沌性等等不同的复杂运动形式,这些行为是线性系统所不具备的。
非线性系统是一组方程组成的系统,这些方程中包含了各种各样的非线性项。
由于非线性项的存在,使得该系统在发展的过程中呈现出了复杂性的运动模式。
而非线性动力学理论研究的就是这种非线性系统所表现出来的各种各样的复杂运动模式。
二、化学反应动力学的基础知识化学反应动力学研究的是化学反应的速率常数和反应机理等方面的问题。
根据反应物物质的浓度、温度等因素的不同,反应的速率常数也会有所不同。
而反应机理则是指化学反应发生的步骤以及其中的中间产物、反应物和反应物之间的相互作用等等。
传统的化学反应动力学研究中,主要使用的是线性动力学理论。
该理论主要研究的是化学反应中的线性系统,即体系中反应物的含量之间是线性关系。
然而,在实际的化学反应中,由于反应物之间的相互作用以及反应过程中的扩散、传递等其他因素的影响,导致反应中出现了非线性效应。
因此,非线性动力学理论作为一种新的研究方法,在化学反应动力学领域中得到了广泛的应用。
三、非线性动力学理论在化学反应过程中的应用研究非线性动力学理论在化学反应领域中的应用主要集中在以下几个方面:1、混沌现象研究混沌现象是非线性动力系统中一个重要的研究内容。
系统动力学原理

系统动力学原理5.1 系统动力学理论5.1.1 系统动力学的概念系统动力学(简称SD—System Dynamics),是由美国麻省理工学院(MIT)的福瑞斯特(J.W.Forrester)教授创造的,一门以控制论、信息论、决策论等有关理论为理论基础,以计算机仿真技术为手段,定量研究非线性、高阶次、多重反馈复杂系统的学科。
它也是一门认识系统问题并解决系统问题的综合交叉学科[1-3]。
从系统方法论来说:系统动力学是结构的方法、功能的方法和历史的方法的统一。
它基于系统论,吸收了控制论、信息论的精髓,是一门综合自然科学和社会科学的横向学科。
系统动力学对问题的理解,是基于系统行为与内在机制间的相互紧密的依赖关系,并且透过数学模型的建立与操作的过程而获得的,逐步发掘出产生变化形态的因、果关系,系统动力学称之为结构。
系统动力学模型不但能够将系统论中的因果逻辑关系与控制论中的反馈原理相结合,还能够从区域系统内部和结构入手,针对系统问题采用非线性约束,动态跟踪其变化情况,实时反馈调整系统参数及结构,寻求最完善的系统行为模式,建立最优化的模拟方案。
5.1.2 系统动力学的特点系统动力学是一门基于系统内部变量的因果关系,通过建模仿真方法,全面动态研究系统问题的学科,它具有如下特点[4-8]:(1)系统动力学能够研究工业、农业、经济、社会、生态等多学科系统问题。
系统动力学模型能够明确反映系统内部、外部因素间的相互关系。
随着调整系统中的控制因素,可以实时观测系统行为的变化趋势。
它通过将研究对象划分为若干子系统,并且建立各个子系统之间的因果关系网络,建立整体与各组成元素相协调的机制,强调宏观与微观相结合、实时调整结构参数,多方面、多角度、综合性地研究系统问题。
(2)系统动力学模型是一种因果关系机理性模型,它强调系统与环境相互联系、相互作用;它的行为模式与特性主要由系统内部的动态结构和反馈机制所决定,不受外界因素干扰。
系统中所包含的变量是随时间变化的,因此运用该模型可以模拟长期性和周期性系统问题。
机械工程控制基础教案

机械工程控制基础教案第一章:绪论1.1 课程介绍1.2 控制理论的基本概念1.3 控制系统的基本类型1.4 控制系统的性能指标第二章:线性系统的时域分析法2.1 系统的数学模型2.2 系统的时域响应2.3 系统的稳定性分析2.4 系统的稳态误差分析2.5 系统的动态性能分析第三章:线性系统的频域分析法3.1 频率响应的基本概念3.2 频率响应的性质3.3 系统的频率响应分析3.4 系统的稳定性分析3.5 系统的稳态误差分析第四章:线性系统的校正方法4.1 系统的校正概述4.2 串联校正设计方法4.3 并联校正设计方法4.4 反馈校正设计方法4.5 系统的动态性能改善第五章:非线性控制系统分析5.1 非线性控制系统的基本概念5.2 非线性系统的数学模型5.3 非线性系统的稳定性分析5.4 非线性系统的稳态误差分析5.5 非线性系统的动态性能分析第六章:机电控制系统的设计与实现6.1 机电控制系统的基本组成6.2 控制系统的设计步骤6.3 控制器的设计方法6.4 控制系统的仿真与实验6.5 控制系统的设计案例分析第七章:PLC控制系统设计7.1 PLC控制系统的基本原理7.2 PLC的硬件组成与功能7.3 PLC控制程序的设计方法7.4 PLC控制系统的设计实例7.5 PLC控制系统的调试与维护第八章:控制系统8.1 控制系统的基本概念8.2 的运动学与动力学8.3 控制系统的组成与原理8.4 控制算法与应用8.5 控制系统的案例分析第九章:现代控制理论简介9.1 现代控制理论的发展概况9.2 状态空间分析法9.3 系统的能控性与能观性9.4 系统镇定与最优控制9.5 现代控制理论在工程中的应用第十章:控制系统在机械工程中的应用10.1 控制系统在机械工程中的重要性10.2 控制系统在自动化设备中的应用10.3 控制系统在中的应用10.4 控制系统在数控机床中的应用10.5 控制系统在其他机械工程领域的应用重点和难点解析一、系统的数学模型难点解析:对复杂机械系统的动态方程建立及求解,状态变量的选取原则,以及如何将实际系统抽象为数学模型。
0801力学一级学科简介
0807力学一级学科简介一级学科(中文)名称:力学(英文)名称: Mechanics一、学科概况力学是关于力、运动及其关系的科学。
其发展历史可追溯到古希腊时代,阿基米德曾对杠杆平衡、物体重心位置、物体在水中受到的浮力等,作了系统研究,确定了它们的基本规律,初步奠定了静力学,即平衡理论的基础。
伽利略通过对抛体和落体的研究,提出了惯性定律并用以解释地面上的物体和天体的运动。
17世纪末牛顿提出了力学运动的三条基本定律,使经典力学形成系统的理论。
此后,力学的研究对象由单个的自由质点,转向受约束的质点和受约束的质点系。
这方面的标志是达朗贝尔原理和拉格朗日分析力学。
其后,欧拉又进一步把牛顿运动定律用于刚体和理想流体的运动方程,这是连续介质力学创立的开端。
纳维、柯西、泊松、斯托克斯等人将运动定律和物性定律两者结合,促使弹性固体力学基本理论和粘性流体力学基本理论建立,使得力学逐渐脱离物理学而成为独立学科。
到20世纪初,在流体力学和固体力学中,实际应用跟数学理论的互相结合,使力学蓬勃起来,创立了许多新理论,同时也解决了工程技术中大量关键性问题。
从20世纪60年代起,计算机的应用日益广泛,力学无论在应用上或理论上都有了新的进展。
力学学科现设固体力学、流体力学、动力学与控制、基础力学与力学交叉、工程力学5个研究方向。
发展至今,力学学科已具有严谨的理论、实验、计算体系。
在20世纪,力学的发展取得了巨大的突破,不仅完备了学科体系,同时与其它学科的交叉与融合推动了交叉学科的形成和发展。
为了适应学科发展的要求,培养人才不应仅限于科学研究,还必须具有独立开展高水平研究的能力,具有力学学科理论、计算和实验研究的基本能力且在其中至少一个方面达到精深的专业水平。
二、学科内涵力学研究介质运动、变形、流动的宏微观行为,揭示力学过程及其与物理、化学、生物学等过程的相互作用规律。
力学既是基础科学,又是技术科学。
力学探索自然界运动的普遍规律,它以机理性、定量化地认识自然、生命与工程中的规律为目标。
系统动力学概述

系统动力学概述
系统动力学(System Dynamics)是一种以反馈控制理论为基础,用于研究复杂动态系统的计算机仿真方法。
它是由麻省理工学院的杰伊·福瑞斯特(Jay Forrester)于1956年提出的,主要用于理解和预测复杂系统的行为。
系统动力学的主要特点是将系统看作是由相互作用的元素组成的整体,这些元素之间的相互作用是通过信息流和物流来实现的。
系统动力学模型通常包括因果关系图、库存流量图和速率变量图等组成部分。
因果关系图是系统动力学模型的基础,它描述了系统中各个元素之间的因果关系。
库存流量图则用来描述系统中的物质或信息的流动情况,而速率变量图则用来描述系统中的变化速度。
系统动力学的主要优点是能够处理非线性、时变和复杂的系统问题,而且模型的建立和求解过程相对简单。
此外,系统动力学还具有很强的直观性和易理解性,因此被广泛应用于经济、社会、生态、工程等领域。
然而,系统动力学也有其局限性。
首先,由于系统动力学模型是基于一定的假设建立的,因此模型的准确性受到假设的影响。
其次,系统动力学模型通常只考虑了系统的主要因素,忽略了一些次要因素,这可能导致模型的预测结果与实际情况有所偏差。
最后,系统动力学模型的求解过程通常需要计算机辅助,这对于
一些没有计算机技术背景的人来说可能是一个挑战。
尽管存在这些局限性,但系统动力学仍然是一种非常有用的工具,它为我们理解和预测复杂系统的行为提供了一种有效的方法。
随着计算机技术的发展和系统动力学理论的进一步完善,我们有理由相信,系统动力学将在未来的科学研究和实践中发挥更大的作用。
动力学与控制
动力学与控制
动力学与控制是研究物体或系统运动规律和控制方法的学科。
它是机械工程、航空航天工程、电子信息工程、化学工程等领域中的核心学科之一。
动力学研究的是物体在运动过程中所受到的力学效应以及其反映出来的运动规律,它是物理学和工程学中的基础学科之一。
动力学研究内容涉及多个方面,主要包括运动学、运动力学和动态力学。
其中,运动学研究物体的运动状态和运动轨迹;运动力学研究物体的受力情况,以及物体因为所受的力而引起的加速度和力的作用时间;动态力学研究物体在运动中的能量转化和它们之间存在的相互作用。
控制理论是基于动力学的理论基础上发展的一个学科。
它主要研究如何对系统进行控制,使得系统的输出能够达到预期目标。
控制理论涉及多个方面,主要包括控制系统的建模、控制器设计、控制系统性能分析等。
控制器是一个执行器,它能够根据输入信号对系统进行控制,并改变系统的输出。
控制器的设计是控制理论中的核心内容之一。
控制器设计的目的是优化控制系统的性能,使得系统的响应速度更快、稳定性更好,并能适应不同的操作环境。
控制系统性能分析是控制理论中的另一个重要内容。
通过性能分析,可以评估控制系统的效果,并将控制系统的性能与预期目标进行比较。
性能指标通常包括系统稳态误差、响应速度、超调量、抗干扰性等。
总之,动力学与控制是研究物体运动规律和控制方法的重要学科,它在工程领域中具有广泛的应用。
在科学研究和工程实践中,掌握动力学与控制的知识和技能,对于进行系统优化、提高系统性能、降低系统能耗等方面具有重要的意义。
控制科学与工程核心课程
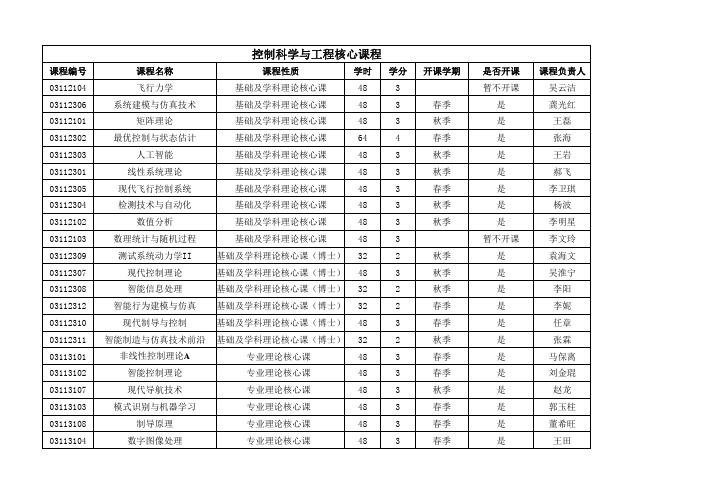
控制科学与工程核心课程课程编号课程名称课程性质学时学分开课学期是否开课课程负责人03112104飞行力学基础及学科理论核心课483暂不开课吴云洁03112306系统建模与仿真技术基础及学科理论核心课483春季是龚光红03112101矩阵理论基础及学科理论核心课483秋季是王磊03112302最优控制与状态估计基础及学科理论核心课644春季是张海03112303人工智能基础及学科理论核心课483秋季是王岩03112301线性系统理论基础及学科理论核心课483秋季是郝飞03112305现代飞行控制系统基础及学科理论核心课483春季是李卫琪03112304检测技术与自动化基础及学科理论核心课483秋季是杨波03112102数值分析基础及学科理论核心课483秋季是李明星03112103数理统计与随机过程基础及学科理论核心课483暂不开课李文玲03112309测试系统动力学II基础及学科理论核心课(博士)322秋季是袁海文03112307现代控制理论基础及学科理论核心课(博士)483秋季是吴淮宁03112308智能信息处理基础及学科理论核心课(博士)322秋季是李阳03112312智能行为建模与仿真基础及学科理论核心课(博士)322春季是李妮03112310现代制导与控制基础及学科理论核心课(博士)483春季是任章03112311智能制造与仿真技术前沿基础及学科理论核心课(博士)322秋季是张霖03113101非线性控制理论A专业理论核心课 483春季是马保离03113102智能控制理论专业理论核心课 483春季是刘金琨03113107现代导航技术专业理论核心课 483秋季是赵龙03113103模式识别与机器学习专业理论核心课 483春季是郭玉柱03113108制导原理专业理论核心课 483春季是董希旺03113104数字图像处理专业理论核心课 483春季是王田03113105测试系统动力学I专业理论核心课322秋季是袁海文03113109飞行仿真技术专业理论核心课483秋季是王江云03113110智能制造系统专业理论核心课483春季是张霖03113112系统工程理论与方法专业理论核心课322春季拟开课王秋生03113106智能感知技术专业理论核心课322暂不开课徐东03113111系统科学与工程专业理论核心课322春季拟开课吕金虎03113113智能自主系统专业理论核心课483秋季是段海滨机械工程核心课程课程编号课程名称课程性质学时学分开课学期是否开课课程负责人03113120电液伺服控制基础及学科理论核心课483春季是焦宗夏03113123机电系统数学方法与控制技术专业理论核心课(博士)483春季是王少萍03113121容错控制系统可靠性技术专业理论核心课322春季是王少萍03113122机电系统非线性动力学与控制专业理论核心课322秋季是李运华电气工程核心课程课程号课程名称课程性质学时学分开课学期是否开课课程负责人03112313电磁场与电磁波基础及学科理论核心课483秋季是肖春燕03112314现代电路理论基础及学科理论核心课483秋季是赵向阳03112315电机的矩阵分析基础及学科理论核心课483春季是郭宏03112316电气工程学科综合课基础及学科理论核心课(博)483春季是武建文03112317电磁物理与电磁监测基础及学科理论核心课322暂不开课03112318多电飞机电气系统基础及学科理论核心课322暂不开课03112319新型电机及其驱动控制基础及学科理论核心课322暂不开课03113115智能电器专业理论核心课322秋季是武建文03113117航空航天电机系统专业理论核心课322春季是丁晓峰03113114现代电力电子技术专业理论核心课322春季是王永03113119电磁兼容原理专业理论核心课322秋季是石景波03113116交流调速及其系统分析专业理论核心课322春季是丁晓峰 03113118电力系统分析专业理论核心课322暂不开课。
系统动力学模型

②因果反馈环 因果反馈环是指由多个要素组成的因果链首尾相 连形成的封闭形环。在该环上的要素,无法确定谁是 起始原因,谁是终止结果。
+ + 产 量 + 投 资 价 格 —
产 量
因果反馈环可分为正反馈和负反馈。把反馈环上某一 要素作为起始原因,经反馈环后又是其本身的结果, 这样形成一个因果链,该链为正(负)时,反馈环为 正(负)反馈。
二、系统动力学模型
系统动力学模型包括两部分内容
①定性模型——反映系统各组成部分关系的流图
②定量模型——由流图抽象出的反映系统动态过程的方
程式
1、系统流图
系统流图是在系统因果关系图的基础上绘制的。
系统动力学认为系统是一个信息反馈系统,把改信息
反馈系统的所有组成部分及其关系、各组成部分的状
态以及对系统状态的控制用符号和方法进行描述所得
②系统动态学规定
当前时刻以k表示,若模拟时间间隔为DT,则K时 刻的前一个DT时刻为J,后一个DT时刻为L,这样, JK则表示K的前一时间间隔,KL表示K的后一时间间隔。 ③系统动力学中的基本方程式 i)积累方程式(L方程式) L X.K=X.J+DT×(R1.JK-R2.JK)
ⅱ)流速方程式(R方程式),它描述积累方程中的 流在单位时间内流入和流出的量。
该系统模拟的结果如下
库存系统模拟数据表 模拟步长/周 0 1 2 3 4 …… 6000 数 量 件 X/件 1000 2000 2800 3440 3952 „„ R1/(件/周) 1000 800 640 512 409 „ D/件 5000 4000 3200 2560 2048 „„
1000 库存量模拟结果曲线
系统动力学

系统动力学什么是系统动力学系统动力学是一种研究动态变化和相互关系的分析方法和工具。
它以系统论、控制论和数学模型为理论基础,通过建立数学模型来描述和分析系统中的各个组成部分之间的相互作用和变化规律,以便预测和控制系统的行为。
系统动力学主要强调系统中各个组成部分之间的相互关系和相互作用,而不是关注系统中各个组成部分的独立行为。
它关注系统中的变量(在数学模型中以方程的形式表示)以及变量之间的关系。
通过分析这些变量和关系,系统动力学能够揭示系统中的动态行为、变化规律和逻辑。
系统动力学的基本概念系统系统是由一组有关联的元素或部分组成的整体。
系统可以是物理系统(如机械系统、电子系统等),也可以是社会系统(如经济系统、生态系统等)或抽象系统(如数学模型等)。
系统动力学主要研究非线性动态系统。
变量变量是系统中可观测或可测量的特征或属性。
变量可以是状态变量(表示系统的状态)或流变量(表示系统的变化率)。
通常使用符号来表示变量,并通过数学模型来描述变量的变化规律。
关系关系描述了系统中变量之间的相互作用和影响。
在系统动力学中,关系可以用数学方程的形式表示。
这些方程的形式可以是线性的(如 y = kx)也可以是非线性的(如 y = kx^2)。
反馈反馈是指系统中输出的一部分又被输送回系统中的过程。
反馈可以是正向的(积极增强系统的行为)或负向的(制约或抑制系统的行为)。
系统动力学通过分析系统中的反馈机制来理解系统的稳定性和变化过程。
系统动力学的应用经济系统系统动力学在经济学中的应用非常广泛。
它可以用来模拟和分析经济系统中的各个变量(如消费、投资、通货膨胀等)之间的相互作用和影响,以便预测和控制经济系统的行为。
系统动力学也可以用来研究经济系统中的非线性动态行为(如经济危机的发生和传播)。
生态系统生态系统是一个复杂的系统,涉及到生物、环境和资源等多个方面。
系统动力学可以用来研究生态系统中的物种相互作用、物种数量变化、环境变化等问题。
机械工程控制基础课程感悟

机械工程控制基础课程感悟机械工程控制基础课程是机械工程专业中的一门重要课程,涉及到控制理论、系统动力学和自动控制等方面的知识。
通过学习这门课程,我深刻理解到控制在机械工程中的关键作用,对于设计、优化和运行机械系统都具有重要意义。
以下是我对机械工程控制基础课程的一些感悟。
1. 掌握控制理论的基础在这门课程中,我系统学习了控制理论的基础知识,包括控制系统的基本概念、数学建模方法、传递函数、状态空间表示等。
这为我深入理解和分析机械系统的动态行为提供了坚实的理论基础。
通过数学模型的建立,我能够更准确地描述和预测机械系统的运动规律,为后续的控制策略设计提供了依据。
2. 理解系统动力学控制基础课程还涉及到系统动力学的内容,包括对系统的动态响应、阻尼比、自然频率等进行分析。
通过学习系统动力学,我更好地理解了机械系统在外部激励下的振动特性,这对于防止系统共振、提高系统稳定性具有重要意义。
同时,这也为我后续学习振动控制等相关内容打下了基础。
3. 学习控制策略的设计与应用在控制基础课程中,我学习了不同的控制策略,包括比例积分微分(PID)控制器、根轨迹设计等。
深入了解这些控制策略的原理和应用,我能够根据实际需求选择合适的控制方式,并进行参数调整以达到期望的控制效果。
这对于提高机械系统的性能、稳定性和精度至关重要。
4. 实践中的应用与案例分析控制基础课程注重将理论知识与实际应用相结合,通过案例分析和实验,我深入了解了控制理论在机械工程中的实际应用。
通过模拟和实验,我更好地理解了控制系统的建模、分析和调试过程。
这使我能够更加熟练地运用所学知识解决实际的控制问题。
5. 对于工程实践的启示机械工程控制基础课程为我今后从事机械工程领域的工程实践提供了深刻的启示。
在实际的工程项目中,控制技术是确保机械系统正常运行、提高工作效率和精度的核心要素之一。
通过学习控制基础,我不仅掌握了理论知识,更培养了解决实际问题的能力,这对于将来从事机械工程的设计、调试和优化工作具有极大的帮助。
控制工程第二章_控制系统的数学基础和数学模型

第二章控制系统的数学基础和数学模型基本要求1.掌握拉氏变换、拉氏反变换的定义、定理。
2.了解数学模型的基本概念。
能够运用动力学、电学及专业知识,列写机械系统、电网络系统的微分方程。
3.掌握传递函数的概念、特点,会求传递函数的零、极点。
4.掌握各个典型环节的特点,传递函数的基本形式及相关参数的物理意义。
5.掌握闭环系统中前向通道传递函数、开环传递函数、闭环传递函数的定义及求法。
掌握干扰作用下,系统传递函数的求法和特点。
6.了解传递函数框图的组成及意义;能够根据系统的微分方程,绘制系统传递函数框图,并实现简化,从而求出系统的传递函数。
7.了解相似原理的概念。
本章重点1.拉氏变换定理。
2.列写系统的微分方程。
3.传递函数的概念、特点及求法。
4.典型环节的传递函数。
5.系统的方框图及其化简。
本章难点1.列写系统微分方程。
2.系统的方框图及其化简。
∞ 2.1 拉普拉斯(L a p l a c e )变换2.1.1 拉氏变换概述1.拉氏变换的定义F (s ) = L [ f (t )] = ⎰0f (t )e -std tf (t ):原函数(实域、时间域) F (s ):象函数(s 域、复数域) s :复变量,s=σ+j ωe - st: 拉氏算子j ω[s]σδ ( t )e -atsin ωtcos ωt2.基本函数的拉氏变换1tkttttu ( t ) r ( t )x i ( t ) k 序号原函数 f (t ) 象函数F (s )1 单位脉冲函数 δ (t ) 12单位阶跃函数 1(t ) 1 s 3 K常数k s4t 单位斜坡函数1 s2 5 tnn ! s n +16 e- at1 s + a7sin ωtω s 2 + ω 28cos ωts s 2 + ω 22.1.2 拉氏变换的主要性质1.线性性质设L [f 1(t )]=F 1(s ),L [f 2(t )]=F 2(s ),k 1,k 2为常数 ,则L [k 1 f 1 (t ) + k 2 f 2 (t )] = k 1L [ f 1 (t )] + k 2 L [ f 2 (t )]= k 1F 1 (s ) + k 2 F 2 (s )2.微分性质若L [f (t )]=F (s ),且f (0)=0,(初始条件为零)则L [ df (t )] =sF (s ) dt3.积分定理若L[f(t)]=F(s),且初始条件为零,则L[⎰ f (t )dt ]= 1 F (s)s4.平移定理若L[[f(t)]=F(s),]则L ⎰e-a t f (t)dt =F (s +a)5.初值定理若L[f(t)]=F(s),则f (0+) = limt →0 f (t) = lim s ⋅F (s)s→∞∞6.终值定理若L [f (t )]=F (s ),则有f (∞) = lim t →∞f (t ) = lim s ⋅ F (s )s →07.延迟定理若L [f (t )]=F (s ),对任一正实数a ,则有L [ f (t - a )]= ⎰0f (t - a )e -st d t = e -as F (s )2.1.2 拉氏变换的主要性质1.线性性质设L [f 1(t )]=F 1(s ),L [f 2(t )]=F 2(s ),k 1,k 2为常数 ,则L [k 1 f 1 (t ) + k 2 f 2 (t )] = k 1L [ f 1 (t )] + k 2 L [ f 2 (t )]= k 1F 1 (s ) + k 2 F 2 (s )2.微分性质若L [f (t )]=F (s ),且f (0)=0,(初始条件为零)则L [ df (t )] =sF (s ) dt3.积分定理若L[f(t)]=F(s),且初始条件为零,则L[⎰ f (t )dt ]= 1 F (s)s4.平移定理若L[[f(t)]=F(s),]则L ⎰e-a t f (t)dt =F (s +a)5.初值定理若L[f(t)]=F(s),则f (0+) = limt →0 f (t) = lim s ⋅F (s)s→∞∞6.终值定理若L [f (t )]=F (s ),则有f (∞) = lim t →∞f (t ) = lim s ⋅ F (s )s →07.延迟定理若L [f (t )]=F (s ),对任一正实数a ,则有L [ f (t - a )]= ⎰0f (t - a )e -st d t = e -as F (s )2.1.3拉氏反变换定义:f(t)=L-1[F(s)],将象函数变换成原函数s:复变量F(s):象函数(s 域、复数域)f(t):原函数(实域、时间域)2.2系统的数学模型数学模型就是描述系统的输出、输入与系统本身结构与参数之间的数学表达式。
系统动力学方法-名词
系统动力学方法系统动力学方法是一种以反馈控制理论为基础,以计算机仿真技术为手段,通常用以研究复杂的社会经济系统的定量方法。
自50年代中美国麻省理工学院地的福雷斯特教授创立以来,它已成功地尖用于企业、城市、地区、国家甚至世界规模的许多战略与决策等分析中,被誉为"战略与决策实验室"。
这种模型从本质上看是带时间滞后的一阶差微分方程,由于建模时借助于"流图",其中"积累"、"流率"和其它辅助变量都具有明显的物理意义,因此可以说是一种布告同实际的建模方法。
它与其它模型方法相比,具有下列特点:(1)适用于处理长期性和周期性的问题。
如自然界的生态平衡、人的生命周期和社会问题中的经济危机等都呈现周期性规律并需通过较长的历史阶段来观察,已有不少系统动力学模型对其机制作出了较为科学的解释。
(2)适用于对数据不足的问题进行研究。
建模中常常遇到数据不足或某些数据难于量化的问题,系统动力学藉各要素间的因果关系及有限的数据及一定的结构仍可进行推算分析。
(3)适用于处理精度要求不高的复杂的社会经济问题。
上述总是常因描述方程是高阶非线性动态的,应用一般数学方法很难求解。
系统动力学则藉助于计算机及仿真技术仍能获得主要信息。
(4)强调有条件预测。
本方法强调产生结果的条件,采?quot;如果……则"的形式,对预测未来提供了新的手段。
系统动力学的基本概念包括:(1)因果反馈。
如果事件A(原因)引起事件B(结果),AB简便形成因果关系。
若A增加引起B增加,称AB构成正因果关系;若A啬引起B减少,则负因果关系。
两个以上因果关系链首尾相连构成反馈回路,亦分正、负反馈回路。
(2)积累。
本法视社会经济状态变化为由许多参变量组成的一种流,通过对流的研究来掌握系统性质和运动规律。
流的规程量便是"积累",用以描述系统状态,系统输入输出流量之差为积累增量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
显然这时设计控 1 + e -tsGc (s )G p (s ) 制律难
有预估校正时,
Y0 (s )
2014-3-9
Gc (s )G p (s ) = R(s ) 1 + Gc (s )G p (s )
G ( s ) G (s ) p p - ts Gc (s )G p (s )[1 + e ] G p (s ) Y0 (s ) = R(s ) G p (s ) - G p (s ) - ts 1 + Gc (s )G p (s )[1 + e yhli@ 13 ] G p (s )
“机电系统非线性动力学与控制” 控制理论基础
1. 2 2. 3. 4. 5. 数学模型,模型之间的转换 系统响应 性能指标 常 控制 常规控制器设计 控制器设计的一般步骤
2014-3-9
yhli@
1
1. 数学模型,模型之间的转换
数学模型:
描述系统特性及变化规律的数学方程, 曲线或表格. 包括参数模型和非参数模型两种. 参数模型: 微分方程,状态方程,差分方程,传递函数 非参数模型: 响应, 规则, 曲线
4 1 PID控制器 4.1
4. 常规控制器设计
Gc ( s)
1 c
Kd s2 K p s KI s
,
K p s KI Kd s , N 5 10, K d K p / Td G ( s) Td s 1 s N
•PID从当前、历史和变化趋势的角度对系统输出 进行有效控制 •对 对一阶系统 阶系统,PI 就可以有效配置极点;对二阶系统,采用PI D可以 有效配置极点。 •在高阶极点,大滞后,机械共振等情况下PID往往不满意,需要 复杂控制器。 •非内作用PID:三个系数互不影响,数字PID或基于四运放构成 PID时用; )PID:三个系数互相影响,但用两个运放就能实现。 •内作用(串联)
2014-3-9 yhli@ 3
随机系统动力学方法建立数学模型
• 各态历经平稳随机过程
集平均等于时间平均,用一个时域样本可以遍历随机过程
• 幅值域 数学期望和各种矩指标(比如方差) T 1 1 N • 时差域 Rx ( ) lim x(t ) x(t )dt , Rx (k ) x(i )x((i k ) ) T T N
yhli@
通过互相关分析方法确定管漏位置
x(t )
c Lx 2 Lx
y (t )
L
假定, 故障源传播到A点的信号时间比传到B点长, 则 思考:如果漏点在AB之外边 t0 Lx t0 Lx t A , tB , 有无意义?如何判断在其在 2 c 2 c AB之外? 2 Lx t A tB 提示:分成 延时 t A t B 是 c 大于零且等于L/c和小于零且 L LA Lx 等于-L/c L/ 两种情况考虑。 两种情况考虑 2
ˆ Y0 (s ) + (Y (s ) -Y (s )) » Y0 (s ) 此式实现无滞后输出估计
无时延时的输出估计
), 理想情况是想求出 Y0 (s ) e -tsGc (s )G p (s ) Y (s ) 无预估校正时, =
R(s )
实际输出与估计输出的误差 实际上只能求出 Y0 (s ) .
Gc ( jc ) Kp j(KDc KI / c ) = Gc ( jc ) (cos j sin)
求出 添加稳态精度 条件可以确定 积分增益
19
Kp cos / Gp ( jc ) , KDc KI / c s sin / Gp ( jc )
• Formulation of the disturbance observer Taking the estimation d of d t as the auxiliary control of the d k p ( y y ) k I ( y y )dt
4 3 饱和与积分器缠绕(wind up) 4.3
通过引入一个饱和元件输出与输入之差的反缠绕环 节,避免使系统长期工作在饱和状态. 为什么饱和有害:控制器输出不反应控制输入变动,容易 为什么饱和有害 控制器输出不反应控制输 变动 容易 出现超调.
2014-3-9
yhli@
14
2014-3-9
yhli@
10
3 性能指标 3.
3.4 响应指标 时域指标: 上升时间,调整时间,最大超调,从阶 跃响应评价 频域指标: 谐振峰值Mp和谐振频率 p 频宽, 从闭环频率响应评价 相对稳定性 从开环对数频率特性或极坐标图评价 增益裕量, 相角裕量
2014-3-9 yhli@ 11
0 i 1
自相关函数和互相关函数 自相关函数是偶函数 功率谱密度的定义
Rxy ( ) lim
1 x(t ) y (t )dt T T 0
T
• 白噪声 指功率谱密度在整个频域内均匀分布的噪声
S ( )
• 线性系统辨识基础
R( )e j d lim
2 2 X ( ) T T
R(s )
K p (1 +
1 ) TI s
G p (s )
Y (s )
K pTds
特征方程与PID校正时相同, 但对输入施加了一个二阶 滤波环节,所以可有效减小给定突变引起的过冲.
Rp Y (s) GP ( s )GPID ( s ) KPs KI pf ( s ) Y ( s ) 2 R ( s ) 1 GP ( s )GPID ( s ) K D s K P s K I R ( s ) Rpf ( s )
g(t ) =
d(t )
G (s )
ò0 g(t )d(t - t )d t
h(t )
t
白噪声
Rx (t ) = d(t )
S x (w) = 1
Rxy (t ) = g(t )
S y ( ) G ( j ) S x ( )
2
S xy (w) = G ( j w)
一般输入时的卷积公式
y (t )
without compensating
实际应用时,饱和 环节的输出信号有 时难以引出 采用 时难以引出,采用 此方案较好。
yhli@
with compensating
2014-3-9
16
4.4 PI-D控制
对误差施加PI, 对输出施加微分作用,可以有效避免给 定突变引起输出过调.
Rxy (t )
2014-3-9
频谱分析仪求取脉冲响应 和频率响应的理论依据
t 0
g ( )x(t )d g ( )x(t )d
S xy ( ) G ( j )
5
注意,在图像处理时,卷积积分限必须从-到+
g ( ) (t )d g (t )
2014-3-9 yhli@ 6
2 系统响应 2.
2.1 时间响应 脉冲响应,阶跃响应,斜坡响应 通过解微分方程求 由传递函数求输出的拉氏变换再逆变换 t t 通过卷积求 y (t ) u (t ) g ( )d g (t )u ( )d 2.2 频率响应 0 0 正弦响应: 对正弦输入的稳态响应(周期解) i ωt , c cm ( ) sin( i (ωt φ( )) r rm sin
2014-3-9 yhli@
4.6 Observer for disturbance
• Dynamic system
f 0 ( x, y ) g 0 ( x, y )u d y y f 0 ( x, y ) g 0 ( x, y )u d
利用Duhamal公式求线性系统的一般解
Duhamal Formula
2014-3-9
yhli@
9
3 性能指标 3.
稳定性,精度,响应速度 快,稳,准 3 1渐近稳定:初始条件的响应衰减到平衡位置 3.1 3.2稳态误 稳态误差: 当时间趋于无穷大时误 当时间趋于无穷大时误差的极限 的极限 3.3对数幅频特性和系统类型,稳态误差的关系
2014-3-9 yhli@ 17
4 5 PID控制器的设计 4.5
主要设计方法包括:
反应曲线法 反应曲线法, 临界比例度法, 极点配置法, 极坐标频率特性法
2014-3-9
yhli@
18
4.5 PID控制器的设计
利用极坐标频率特性设计 利用极坐标频率特性设计PID控制器 控制器
cm rm G (jω) , φ Arg(G (jω))
2014-3-9 yhli@ 7
Input / Output Response
利用Duhamal公式求阶梯组合输入时的响应
yhli@
Duhamal Formula
2014-3-9
8
Input / Output Response
t0
estimated system
• Analysis of the estimation property
t into d k p ( y y ) k I ( y y )dt yields substituting d d y y t0 2 k p s kI d (s) 2 d ( s k p s k I ) d (k p s k I ), d ( s) s k p s kI
2014-3-9 yhli@ 12
R(s )
4.2 纯滞后系统校正(Smith预估)
G c (s )