一种控制器通讯协议格式规范
DMC3000,DMC6000 控制器MODBUS RTU通讯协议_V1.01

6.CRC16 校验算法
const unsigned char auchCRCHi[]={ 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81, 0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0, 0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01, 0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41, 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81, 0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01, 0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40, 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81, 0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0, 0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01, 0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41, 0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81, 0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01, 0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41, 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81, 0x40};
EU控制器MODBUS通讯协议
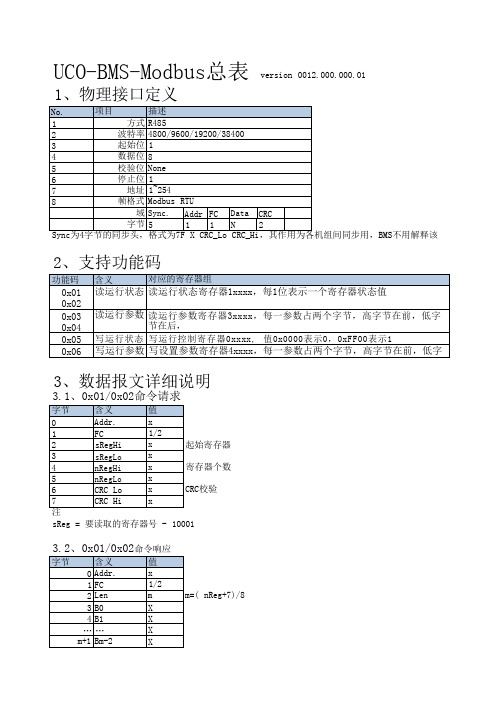
UCO-BMS-Modbus 总表 1、物理接口定义version 0012.000.000.01BMS 不用解释该2、支持功能码3、数据报文详细说明寄存器个数 校验 sReg = 要读取的寄存器号 - 10001命令响应1,每一bit 代表一个寄存器的值,0:表示关,1:表示开2,每个字节从bit0开始填充,最后一个字节的不足8位的,则剩余的高位添0sReg = 要读取的寄存器号 - 300011、sReg = 要读取的寄存器号 - 000012、0x0000表示关,0xFF00表示开写的值 校验 寄存器个数 校验如果写入成功,则数据原样返回,否则应答不成功原因- 400013.8、0x06命令响应1、如果写入成功,则数据原样返回,否则应答不成功原因2、如果写入成功,则值会写入EEPROM ,掉电保存4、异常响应除广播地址不响应外,本机接收请求,会有如下4中响应处理 1)接收到一个正确的,可以正常操作的命令请求,则响应一个正常的,有效的响应。
2)如果由于通讯错误,没有接收到有效的命令请求,则不响应 3)如果由于通讯错误,接收到命令请求中的CRC 校验错误,则不响应 4)如果接收到有效的请求命令,但却无法操作,比如寄存器不存在,或值无效,则返回一个例外 小节3详细描述了正常响应的报文格式如果数据报文无法操作,则按如下报文规则返回一个例外响应,例外响应的FC 的最高位置1写的值 校验 写的值 校验 写的值 校验 sReg = 要读取的寄存器号5、数据表6、协议使用详细说明6.1、6.1.1 读取开关量,01命令请求报文01 01 00 3C 00 27 BC 1C01命令响应报文0500 00 80 0B 00 97 8A字节0的bit0为61号寄存器值,bit1为62号寄存器的值,每8个连续的寄存器的值组成一个字节6.1.2 读取模拟量,03命令请求报文01 03 00 00 00 0585 C903命令响应报文01 030A FE 70 00 62 FD DA 00 00 00 00 2A BA2的补码表示,比如FE70为-400,除以6.1.3 控制命令,05命令请求报文01 05 00 1D FF 0005命令响应报文,控制成功01 05 00 1D FF 006.1.4 设置命令,06命令请求报文01 06 00 14 01 3D1C 3C1C 3C09 8F06命令响应报文,设置成功01 06 00 14 01 3D 09 8F2的补码表示,下发的数据=实际数据6.2、控制说明1、要进入手动或调测模式,用05命令,控制寄存器30,下发值FF00进入调测模式,下发值0000退2、所有部件的控制,必须进入调测模式才可以控制,否则返回控制不成功3、必须先启动内风机,才能开启其它部件,否则开启不了4、要进入强制制冷模式,用05命令,控制寄存器29,下发值FF00进入强制制冷,下发值0000退出5、所有06命令下发的设置值,都会写入到EEPROM中,掉电不丢失。
仪器通信协议标准

仪器通信协议仪器通信协议是用于规范仪器与计算机之间数据交换的标准,其体系结构主要包含物理层、数据链路层、网络层、传输层和应用层。
物理层物理层是仪器通信协议的最底层,主要负责传输比特流。
它定义了通信链路的机械、电气、功能和定时特性,以确保比特流的正确传输。
物理层协议规定了连接、传输和断开连接的方式,以及比特流的同步和错误控制方式。
常见的物理层协议包括RS-232、RS-485和USB等。
数据链路层数据链路层负责将比特流组合成帧,并在通信链路上发送和接收帧。
它定义了帧的格式和结构,以及帧的传输顺序和错误控制方式。
数据链路层还提供了流量控制功能,以确保数据的可靠传输。
常见的数据链路层协议包括以太网和Wi-Fi等。
网络层网络层负责将数据从源地址发送到目的地址。
它通过路由选择算法确定最佳路径,并建立和维护通信链路。
网络层还提供了拥塞控制和差错控制功能,以确保数据的可靠传输。
常见的网络层协议包括IP、ARP和ICMP等。
传输层传输层负责将数据分段并发送到目标主机。
它提供了端到端的通信服务,并确保数据的顺序和完整性。
传输层还提供了流量控制和差错控制功能,以确保数据的可靠传输。
常见的传输层协议包括TCP和UDP等。
应用层应用层负责提供应用程序之间的通信服务。
它定义了应用程序之间的通信协议,并提供了一组通用的应用程序接口。
应用层协议根据具体的应用需求而有所不同,但通常包括文件传输、电子邮件和Web浏览等功能。
常见的应用层协议包括HTTP、FTP和SMTP等。
总之,仪器通信协议是一个完整的体系结构,涵盖了从物理层到应用层的各个方面。
RS485通讯 modbus 协议

使用说明书 - 1 -_MODBUS 通讯协议说明一.通讯说明控制器采用RS-485总线,协议符合ModBus RTU 规约。
数据传输均采用8位数据位、1位停止位、无奇偶校验位。
波特率可设为1200-9600 bit/s 。
通讯传送分为独立的信息头,和发送的编码数据。
以下的通讯传送方式定义与RTU 通讯规约相初始结构 = >=4字节的时间地址码 = 1 字节功能码 = 1 字节数据区 = N 字节错误校检 = 16位CRC 码结束结构 = >=4字节的时间地址码:地址码为通讯传送的第一个字节。
这个字节表明由用户设定地址码的从机将接收由主机发送来的信息。
并且每个从机都有具有唯一的地址码,并且响应回送均以各自的地址码开始。
主机发送的地址码表明将发送到的从机地址,而从机发送的地址码表明回送的从机地址。
功能码:通讯传送的第二个字节。
ModBus 通讯规约定义功能号为1到127。
本控制器利用其中的一部分功能码。
作为主机请求发送,通过功能码告诉从机执行什么动作。
作为从机响应,从机发送的功能码与从主机发送来的功能码一样,并表明从机已响应主机进行操作。
如果从机发送的功能码的最高位(比如功能码大于127),则表明从机没有响应操作或发送出错。
数据区:数据区是根据不同的功能码而不同。
CRC 码:二字节的错误检测码。
当通讯命令发送至仪器时,符合相应地址码的设备接通讯命令,并除去地址码,读取信息,如果没有出错,则执行相应的任务;然后把执行结果返送给发送者。
返送的信息中包括地址码、执行动作的功能码、执行动作后结果的数据以及错误校验码。
如果出错就不发送任何信息。
1 2.信息帧格式:(1) 地址码: 地址码是信息帧的第一字节(8位),从0到255。
这个字节表明由用户设置地址的从机将接收由主机发送来的信息。
每个从机都必须有唯一的地址码,并且只有符合地址码的从机才能响应回送。
当从机回送信息时,相当的地址码表明该信息来自于何处。
欧姆龙plc通讯协议
欧姆龙PLC通讯协议简介PLC(Programmable Logic Controller,可编程逻辑控制器)是一种用于自动化控制的电子设备,广泛应用于工业控制系统中。
欧姆龙(Omron)是一家知名的自动化控制解决方案提供商,其PLC产品在许多行业中被广泛使用。
本文档将介绍欧姆龙PLC通讯协议,包括其基本原理、通讯方式以及常见的通讯协议类型。
通讯协议的基本原理在自动化控制系统中,PLC通讯协议起着关键的作用。
它定义了PLC与其他设备(如上位机、传感器、执行器等)之间进行数据交换的规则和格式。
通讯协议使得不同设备之间能够准确、可靠地传输和解析数据,实现各种控制操作。
通讯协议的基本原理包括以下几个方面:1.数据格式:通讯协议定义了数据在传输过程中的格式,通常包括数据头、数据体和数据尾等部分。
这些格式使得接收设备能够准确地解析数据,并执行相应的操作。
2.通讯方式:通讯协议规定了PLC与其他设备之间进行通讯的方式,包括串口通讯、以太网通讯等。
不同的通讯方式具有不同的特点和应用场景,选择合适的通讯方式可以提高通讯的稳定性和速度。
3.协议类型:通讯协议根据不同的应用场景和需求,分为多种类型,如Modbus协议、Profibus协议等。
每种协议都有自己的特点和优势,根据实际需求选择合适的协议能够实现更好的通讯效果。
欧姆龙PLC通讯方式欧姆龙PLC支持多种通讯方式,常见的包括串口通讯和以太网通讯。
下面将对这两种通讯方式进行简要介绍。
串口通讯串口通讯是一种基于RS232或RS485等标准的通讯方式,通过串口将PLC与其他设备连接起来。
欧姆龙PLC通常支持多个串口接口,可以与多个设备进行通讯。
串口通讯的优点是成本较低,适用于小规模的控制系统。
然而,由于串口通讯的传输速率较低,其通讯距离有限,且易受干扰。
因此,在一些大规模、复杂的控制系统中,串口通讯的应用相对较少。
以太网通讯以太网通讯是一种基于以太网协议的通讯方式,通过以太网将PLC与其他设备连接起来。
佳力图机房专用空调KN10控制器-通讯协议
佳力图机房专用空调KN10控制器ModbusRTU通信协议(20140915)1.1范围KN10空调控制器支持ModBus RTU通信协议(ModBus是Modicon公司的注册商标),通信协议详细地描述了控制器的输入和输出命令、信息和数据,以便第三方使用和开发。
1.2物理接口连接UI面板的通信口采用工业标准串行RS485 通讯口,UI口地址固定为119。
控制系统CAN-BUS总线网络通过1台CAN/RS485网关实现上位机与网络上任意一台空调主机设备的点对点主从通讯。
主机设备的地址 = 网络组号*32 + 机器号。
(注:零号地址保留)数据格式:起始位1 位,数据位8 位,停止位1 位,无校验,数据传输缺省速率为9600b/s。
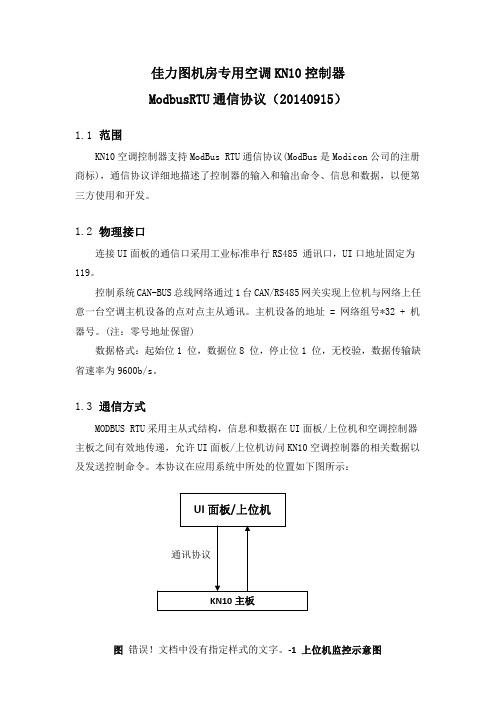
1.3通信方式MODBUS RTU采用主从式结构,信息和数据在UI面板/上位机和空调控制器主板之间有效地传递,允许UI面板/上位机访问KN10空调控制器的相关数据以及发送控制命令。
本协议在应用系统中所处的位置如下图所示:图 错误!文档中没有指定样式的文字。
‐1 上位机监控示意图1.4MODBURTU通信协议详述1.4.1数据字节格式描述信息传输为异步方式,并以字节为单位,每个字节由8 位二进制数组成: 表格 错误!文档中没有指定样式的文字。
-1 通迅格式起始位 1位数据位 8位奇偶校验位 无校验停止位 1位流控 无流控通讯速率 9600bps1.4.2数据帧结构描述通讯主要流程如下图:图 错误!文档中没有指定样式的文字。
-2 通讯流程 每个数据帧组成如下:(RTU模式)表格 错误!文档中没有指定样式的文字。
-2 帧结构地址码 功能码 数据信息 CRC校验8 位 8 位 N*8 位 16位1.地址码地址码是每次数据帧的第一字节(8 位),表明由用户设置地址的从机将接收由主机发送来的信息。
每个从机都必须有唯一的地址码,并且只有符合地址码的从机才能响应回送信息。
当从机回送信息时,回送数据均以各自的地址码开始。
QB2100控制器通讯协议

QB2100控制器通讯协议
河南驰诚电气股份有限公司
2018/04/03
1、概述
本协议适用于上位机软件与QB2100控制器之间的通讯协议,采用标准的ModbusRTU协议。
2、传输规范
工作方式:RS485半双工
波特率:默认9600
数据格式:起始位 1
数据位8
校验位None
停止位 1
流控制None
错误检测(Error Checking):CRC-16
3、通讯帧结构
1)主从命令格式
主站命令格式:
从站命令格式:
主:0103 00 6500 0194 15
从:0103 0200 00B8 44
2)QB2100控制器读取格式
QB2100控制器可以连接16路分线型探测器或64路总线型探测器,其中控制器上传时,分线型和总线型的寄存器起始地址是不同的。
QB2100控制器的16路分线型探测器通道号为A01-A16,对应的寄存器地址如下表:
QB2100控制器的64路总线型探测器通道号为D01-D64,对应的寄存器地址如下表:。
plc的通讯协议-概述说明以及解释
plc的通讯协议-概述说明以及解释1.引言1.1 概述PLC(Programmable Logic Controller)是一种专门用于工业控制系统的自动化控制器,具有可编程性和逻辑运算能力。
PLC通讯协议是PLC 与其他设备(如传感器、执行器、人机界面等)之间进行数据交换和通讯的规范和标准,是实现工业自动化控制系统中不同设备之间互联互通的重要手段。
在工业自动化领域,PLC通讯协议起着至关重要的作用,它使不同厂家、不同型号的设备能够实现数据传输和信息交换,实现设备之间的协同工作。
不同的PLC通讯协议具有不同的特点和适用范围,选择合适的通讯协议对于确保系统稳定性、性能和可靠性具有重要意义。
本文将深入探讨PLC通讯协议的概念、作用、常见类型及应用领域,以期帮助读者更全面地了解和掌握PLC通讯协议的基本知识,为工业自动化控制领域的实际应用提供参考和指导。
1.2 文章结构本文主要分为三个部分: 引言、正文和结论。
在引言部分,将对PLC通讯协议进行概述,介绍文章的结构和目的,为后续内容做铺垫。
在正文部分,将详细讨论PLC通讯协议的概念、作用、常见类型以及应用领域。
通过对这些内容的解析,读者将对PLC通讯协议有更深入的了解。
在结论部分,将总结PLC通讯协议的重要性,并展望其未来的发展趋势。
最后,通过一些结束语,对整篇文章做出一个简要的总结。
1.3 目的本文的目的是通过对PLC通讯协议的概念、作用、类型和应用领域的介绍,使读者能够更全面地了解PLC通讯协议在工业自动化领域中的重要性和必要性。
同时,希望通过对PLC通讯协议发展趋势的展望,引发读者对未来PLC通讯技术的思考和探讨。
通过本文的阐述,读者能够深入了解PLC通讯协议的相关知识,为工程师和技术人员在实际工作中应用和优化PLC通讯协议提供参考和指导。
2.正文2.1 PLC通讯协议的概念和作用PLC通讯协议是指用于控制系统中不同设备之间进行数据交换和通讯的规定和约定。
台达PLC通讯协议
台达PLC通讯协议协议名称:台达PLC通讯协议一、协议目的本协议的目的是规范台达PLC(可编程逻辑控制器)的通讯协议,确保不同设备之间的数据传输和通讯的稳定性和准确性。
二、协议范围本协议适用于所有使用台达PLC进行通讯的设备和系统。
三、协议内容1. 通讯接口台达PLC支持多种通讯接口,包括但不限于串口、以太网口、CAN总线等。
具体的通讯接口使用需根据实际情况进行选择。
2. 通讯协议台达PLC采用自有的通讯协议,协议格式如下:- 数据帧格式:起始字符 + 数据长度 + 数据内容 + 校验和 + 终止字符- 起始字符:用于标识数据帧的起始位置,固定为特定字符。
- 数据长度:表示数据内容的长度,以字节为单位。
- 数据内容:具体的数据内容,根据通讯需求进行定义。
- 校验和:用于校验数据的完整性和准确性,采用CRC校验算法。
- 终止字符:用于标识数据帧的结束位置,固定为特定字符。
3. 数据传输方式台达PLC支持多种数据传输方式,包括但不限于请求-应答方式、发布-订阅方式等。
具体的数据传输方式需根据实际情况进行选择。
4. 数据格式台达PLC支持多种数据格式,包括但不限于二进制、ASCII码等。
具体的数据格式需根据通讯需求进行选择。
5. 错误处理在数据传输和通讯过程中,可能会出现各种错误情况,包括但不限于通讯超时、数据丢失、数据错误等。
为了确保通讯的稳定性和准确性,需要对错误进行适当处理,包括但不限于重传、错误提示等。
6. 安全性保障为了保障通讯的安全性,台达PLC提供了多种安全机制,包括但不限于数据加密、身份认证等。
具体的安全机制需根据实际情况进行选择和配置。
7. 性能要求台达PLC的通讯协议应具备以下性能要求:- 通讯速度:根据实际需求,通讯速度应达到一定的要求,以保证数据传输的实时性。
- 通讯稳定性:通讯协议应具备较高的稳定性,能够在各种环境下正常工作。
- 通讯容错性:通讯协议应具备较高的容错性,能够自动处理错误情况,确保数据的准确性和完整性。
MODBUSTCPIP协议规范详细介绍
MODBUSTCPIP协议规范详细介绍Modbus是一种通信协议,广泛应用于工业自动化领域。
它定义了一种用于从控制器通信的通讯协议,包括了一系列规范与标准,其中Modbus TCP/IP是Modbus协议在以太网上的实现。
Modbus TCP/IP协议是基于TCP/IP协议的应用层协议。
它允许设备使用以太网通过Modbus协议进行通信。
Modbus TCP/IP协议通常用于连接远程设备、传感器和执行器等设备,通过网络进行数据交换与控制。
Modbus TCP/IP协议使用了客户端-服务器(C/S)的架构。
客户端是发出请求的设备,而服务器是提供数据和响应请求的设备。
客户端可以请求服务器读取或写入特定的数据寄存器。
请求消息和响应消息都是基于Modbus协议格式的数据报文。
Modbus TCP/IP协议规范定义了以下几个关键的方面:1. 消息格式:Modbus TCP/IP协议使用面向字节的通讯方式,每个字节都是8位的二进制数。
每个消息都包括了一些固定的字段,如事务标识符(transaction identifier)、协议标识符(protocol identifier)、消息长度(length)等。
这些字段用于标识和验证消息的完整性。
2. 寄存器地址:Modbus TCP/IP协议使用16位的地址来访问设备的寄存器。
可以通过请求消息的字段来指定要读取或写入的寄存器地址。
寄存器可以是输入寄存器、输出寄存器、保持寄存器和线圈。
输入寄存器是只读的,输出寄存器和保持寄存器是可读写的,而线圈是可读写的布尔值。
3. 功能码:Modbus TCP/IP协议使用功能码来标识要执行的操作类型。
常见的功能码包括读取输入寄存器(0x04)、读取保持寄存器(0x03)、写单个线圈(0x05)等。
不同的功能码对应不同的操作,客户端可以通过发送请求消息来执行相应的功能。
4.响应和错误处理:当服务器接收到客户端的请求消息后,会进行相应的处理并返回响应消息。
电机控制器通信协议

电机控制器通信协议
1协议概述
1.1 协议规范:
CAN总线系统执行CAN2.0B技术规范,物理层应符合SAE J1939-11:2006中的相关规定,总线通信速率:250kbit/s。
使用CAN扩展帧29位标识符,格式定义应符合SAE J1939-21:2006中的相关规定。
多字节数据发送时,低字节先发,高字节后发。
29位标识符由优先级P(0~7)、保留位R(=0)、数据页DP(=0)、PDU格式PF、PDU特定格式PS及源地址SA七部分组成,协议数据单元(PDU)格式如下:
1.2 CAN 总线网络组成
CAN0
CAN4
1.3 CAN总线各节点地址分配
1.4 数据格式定义
注:电压,电流,温度,SOC 能量等部分参数数据格式的定义参考GB/T 27930~2015 2电机控制器通信协议
2.1 报文信息
2.2 报文解析
0x08C1EF21
500转100牛扭矩模式前进挡08 52 64 00 02 01 00 00
CAN通讯地址对应表。
台达PLC通讯协议

台达PLC通讯协议协议名称:台达PLC通讯协议协议目的:本协议旨在规范台达PLC(可编程逻辑控制器)的通讯协议,确保PLC与其他设备之间的可靠通讯,并提供准确的数据传输和控制功能。
1. 引言1.1 协议背景台达PLC是一种广泛应用于工业自动化领域的控制设备,用于监控和控制各种生产过程。
为了实现PLC与其他设备之间的通讯,需要定义一套标准的通讯协议。
1.2 协议目标本协议的目标是确保台达PLC与其他设备之间的通讯稳定可靠,并提供高效的数据传输和控制功能。
同时,本协议还旨在提供一致的通讯标准,以便不同厂家的设备能够互相兼容和交互操作。
2. 协议规范2.1 通讯接口台达PLC支持多种通讯接口,包括以太网、串口、CAN总线等。
具体的通讯接口类型和参数应根据实际需求进行配置。
2.2 通讯协议台达PLC通讯协议采用基于TCP/IP协议的Modbus通讯协议。
Modbus是一种常用的工业通讯协议,具有简单、可靠、易于实现的特点。
2.3 数据格式2.3.1 Modbus RTU格式Modbus RTU格式是一种二进制数据格式,用于串口通讯。
数据包由起始位、设备地址、功能码、数据域、CRC校验和终止位组成。
2.3.2 Modbus TCP格式Modbus TCP格式是一种基于TCP/IP协议的数据格式,用于以太网通讯。
数据包由TCP头部、Modbus头部、数据域和校验和组成。
2.4 数据传输2.4.1 请求与响应通讯过程中,设备之间通过请求与响应的方式进行数据传输。
请求方发送请求数据包,响应方接收请求数据包并返回响应数据包。
2.4.2 数据域数据域中包含了具体的数据信息,根据功能码的不同,数据域的格式也会有所区别。
2.4.3 异常处理在通讯过程中,可能会出现各种异常情况,如通讯超时、通讯错误等。
对于这些异常情况,应采取相应的处理措施,如重新发送请求、进行错误重试等。
3. 协议实施3.1 设备配置在使用台达PLC进行通讯之前,需要对设备进行相应的配置。
控制器通讯协议说明书

控制器通讯协议说明书注意事项:本文将详细说明控制器通讯协议的相关知识和技术要点,重点介绍控制器通讯协议在工业自动化环境下的应用和实践。
本文涵盖了常见的控制器通讯协议、通讯模式和通讯接口,同时还探讨了控制器通讯协议在不同场景下的优缺点和使用限制。
此外,本文还提供了一些实用的技术建议和应用案例,旨在帮助读者更好地理解和应用控制器通讯协议。
1.控制器通讯协议简介控制器通讯协议是一种用于实现控制器之间或者控制器和PC之间的数据交换协议,其目的是在不同的控制器系统中实现信息共享和互操作性。
常见的控制器通讯协议有Modbus、CAN、Profibus、Ethernet、DeviceNet、HART、AS-i等。
每种控制器通讯协议都有其特定的通讯模式和通讯接口。
2.控制器通讯协议的通讯模式控制器通讯协议的通讯模式可以分为两种:点对点通讯和总线通讯。
点对点通讯是指两个节点之间直接建立通信连接,每一个节点都有唯一的地址,比如RS232、RS422/485等。
总线通讯是指多个节点通过同一条总线完成通信,每个节点都可以向总线发布数据或者接收数据,比如CAN、Ethernet、Profibus、DeviceNet等。
3.控制器通讯协议的通讯接口控制器通讯协议的通讯接口可以分为两种:硬件接口和软件接口。
硬件接口通常使用物理接口来连接设备,比如串口、网口、USB等。
软件接口通常使用软件API接口来实现数据交换,比如Modbus TCP、Modbus RTU等。
4.常见控制器通讯协议的特点和应用场景4.1 ModbusModbus是一种常用的串行通信协议,常用于工业自动化领域的设备之间的通信。
Modbus协议采用基于请求/响应的通讯方式,支持点对点和总线通讯,支持多种不同的传输媒介。
Modbus协议的应用广泛,包括远程监控、传感器网络、机器人控制等。
4.2 CANCAN是一种通用的总线协议,广泛应用于汽车电子、机器人控制、工业控制等领域。
台达PLC通讯协议

台达PLC通讯协议协议名称:台达PLC通讯协议一、引言本协议旨在规范台达PLC(Programmable Logic Controller,可编程逻辑控制器)的通讯协议,确保设备之间的有效通信和数据传输。
该协议适用于台达PLC设备及其相关通信设备。
二、定义1. 台达PLC:指由台达电子工业股份有限公司(以下简称“台达”)生产的可编程逻辑控制器。
2. 通讯协议:指台达PLC设备与其他设备之间进行数据传输和通信所遵循的规范和规则。
三、通讯协议规范1. 通讯协议类型:台达PLC支持多种通讯协议,包括但不限于Modbus协议、Ethernet/IP协议、Profibus协议等。
使用者应根据实际需求选择合适的通讯协议。
2. 数据传输方式:通讯协议支持数据的双向传输,包括从PLC设备发送数据到其他设备(如上位机、传感器等),以及接收其他设备发送的数据。
3. 通讯接口:台达PLC设备提供多种通讯接口,如串口、以太网口等。
使用者应根据实际需求选择合适的通讯接口。
4. 数据格式:通讯协议规定了数据的格式,包括数据的编码方式、数据的长度、数据的校验等。
使用者应按照通讯协议规定的格式进行数据的编码和解码。
5. 通讯速率:通讯协议规定了数据传输的速率,使用者应根据实际需求设置合适的通讯速率。
6. 错误处理:通讯协议规定了错误处理的方式,包括错误码的定义、错误信息的传递等。
使用者应根据通讯协议规定的错误处理方式进行错误处理。
四、通讯协议配置1. 设备连接:使用者应根据通讯协议规定的接线方式将台达PLC设备与其他设备连接。
接线方式包括但不限于串行连接、并行连接、以太网连接等。
2. 参数配置:使用者应根据通讯协议规定的参数配置要求,对台达PLC设备进行相应的参数配置。
参数配置包括通讯协议类型、通讯接口、数据格式、通讯速率等。
3. 软件设置:使用者应根据通讯协议规定的软件设置要求,对相关软件进行相应的设置。
软件设置包括但不限于通讯协议选择、数据编码方式设置、错误处理设置等。
台达PLC通讯协议
台达PLC通讯协议协议名称:台达PLC通讯协议一、引言本协议旨在规范台达PLC(可编程逻辑控制器)的通讯协议,确保不同设备之间的数据传输和通讯稳定可靠。
本协议适用于台达PLC设备及其相关通讯设备。
二、协议版本本协议的当前版本为1.0,适用于台达PLC通讯协议的基本规范。
三、协议范围本协议适用于台达PLC设备及其相关通讯设备之间的数据传输和通讯。
四、协议要求1. 通讯方式台达PLC通讯协议支持以下通讯方式:a. 串行通讯:支持RS232和RS485通讯接口。
b. 网络通讯:支持以太网通讯接口。
2. 数据传输格式a. 串行通讯:数据传输格式为ASCII码或二进制。
b. 网络通讯:数据传输格式为TCP/IP协议。
3. 数据传输速率a. 串行通讯:支持的数据传输速率为2400、4800、9600、19200、38400、57600和115200bps。
b. 网络通讯:支持的数据传输速率为10Mbps、100Mbps和1000Mbps。
5. 通讯协议a. 串行通讯:支持Modbus RTU协议。
b. 网络通讯:支持Modbus TCP/IP协议。
6. 数据格式a. 数据长度:数据长度为16位或32位。
b. 数据类型:支持整型、浮点型、布尔型等数据类型。
7. 通讯安全a. 串行通讯:支持数据校验和错误检测。
b. 网络通讯:支持数据加密和身份验证。
8. 异常处理a. 通讯异常:当通讯中断或出现错误时,设备应能够自动重连或报警。
b. 数据异常:当接收到异常数据时,设备应能够进行数据校验和错误处理。
9. 可扩展性a. 支持多设备通讯:设备应能够同时与多个台达PLC设备进行通讯。
b. 支持多协议通讯:设备应能够同时支持多种通讯协议。
10. 文档要求a. 设备必须附带详细的通讯协议文档,包括通讯方式、数据传输格式、数据格式、通讯协议、通讯安全、异常处理等内容。
b. 设备的通讯协议文档必须提供示例代码和详细的使用说明。
雷达水位计RS485 MODBUS通讯协议规范
26GHz脉冲雷达水位计RS485 MODBUS
通讯协议规范
1.MODBUS协议介绍
Modbus 协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
Modbus 协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。
它描述了一控制器请求访问其它设备的过程,如果回应来自其它设备的请求,以及怎样侦测错误并记录。
Modbus遵从主从模式,协议在一根通讯线上使用应答式连接(半双工),协议只允许在主计算机和终端设备之间,而不允许独立的设备之间的数据交换,这就不会在使它们初始化时占据通讯线路,而仅限于响应到达本机的查询信号。
传输方式是一个信息帧内一系列独立的数据结构以及用于传输数据的有限规则,雷达水位计是以RTU(远程终端单元)模式在Modbus总线上进行通讯。
代码系统
●8位二进制,十六进制数0...9,A...F
●消息中的每个8位域都是一个两个十六进制字符组成
每个字节的位
●1个起始位
●8个数据位,最小的有效位先发送
●1个奇偶校验位,无校验则无
●1个停止位(有校验时),2个Bit(无校验时)
错误检测域
●CRC(循环冗长检测)
2.RTU模式的数据结构
3.通讯配置
4.雷达水位计通讯协议定义
5.雷达水位计通讯示范
2。
modbus协议格式

modbus协议格式Modbus是一种通信协议,常用于工业自动化领域中的数据传输。
该协议定义了一种以主从架构进行通信的方式,其中主设备(通常是一个控制器)通过发送命令来读取或写入从设备(如传感器、执行器等)的数据。
下面是Modbus协议的格式。
Modbus协议包括了不同的功能码,每个功能码对应一种操作。
常用的功能码包括读取和写入寄存器、读取和写入多个寄存器等。
以下是Modbus协议的格式:1. 通讯起始位:一个起始位用于标记通讯的开始。
通常是一个高电平信号。
2. 从设备地址位:一个8位的二进制数,用于标识从设备的地址。
每个从设备都有一个唯一的地址。
3. 功能码:一个8位的二进制数,用于标识所需执行的操作。
例如,功能码03表示读取多个寄存器的值。
4. 数据位:根据功能码的不同,数据位的格式也会有所不同。
在读取寄存器的操作中,数据位表示了要读取的寄存器地址以及寄存器数量。
在写入寄存器的操作中,数据位表示了寄存器地址和要写入的值。
5. CRC校验:一个16位的循环冗余校验码,用于检测数据传输过程中是否出现错误。
发送方会计算CRC校验码并将其附加到消息的末尾,接收方在接收消息后也会重新计算CRC校验码并与接收到的校验码进行比较,如果两者不一致,则说明数据传输过程中出现了错误。
6. 通讯结束位:一个结束位用于标记通讯的结束。
通常是一个低电平信号。
总体来说,Modbus协议的格式是比较简单且易于理解的。
通过定义好的功能码和数据位,主设备可以以统一的方式与不同的从设备进行通讯,实现数据的读取和写入操作。
同时,通过CRC校验码的使用,可以有效地检测和纠正数据传输过程中的错误,提高通讯的可靠性。
需要注意的是,Modbus协议有两种常用的传输方式:串行和以太网。
串行通信是通过RS485或RS232等物理层接口进行数据传输的,而以太网通信则是通过TCP/IP协议在局域网或广域网中进行数据传输的。
不同的通信方式会影响到数据帧的封装和物理层的传输。
s7通讯原理
s7通讯原理S7通讯原理S7通讯原理是指西门子公司S7系列可编程逻辑控制器(PLC)的通信方式和工作原理。
S7系列PLC是一种广泛应用于工业自动化领域的控制设备,它通过通信方式实现与外部设备的数据交换和控制命令的传递。
在工业自动化系统中,S7通讯原理的掌握对于实现设备之间的高效协作和数据传输至关重要。
一、S7通讯协议S7通讯原理的基础是S7通讯协议,它是一种特定的通信规范,定义了PLC与其他设备之间的通信方式和数据格式。
S7通讯协议主要包括以下几个方面:1. 通信介质:S7通讯协议可以通过以太网、串口、Profibus等多种通信介质进行数据传输。
其中以太网通信方式广泛应用于现代工业自动化系统中,具有速度快、稳定性好等优点。
2. 报文格式:S7通讯协议规定了数据传输的报文格式,包括报文头、数据区和校验码等部分。
报文头包含了发送方和接收方的地址信息,数据区则用于传输具体的控制命令和数据。
3. 通信方式:S7通讯协议支持多种通信方式,包括点对点通信、多点通信和集中式通信等。
其中点对点通信是指一对一的通信方式,多点通信是指一对多的通信方式,而集中式通信则是指通过中间设备实现多个设备之间的通信。
二、S7通讯原理S7通讯原理主要包括PLC通信模块、通信协议和通信数据处理三个方面。
1. PLC通信模块:PLC通信模块是S7系列PLC中的一个重要组成部分,它负责实现PLC与外部设备之间的数据交换。
通信模块通常包括一个或多个通信口,用于连接不同的通信介质,例如以太网口、串口等。
通过通信模块,PLC可以与其他设备进行数据交换和通信。
2. 通信协议:通信协议是指PLC与外部设备之间进行数据传输时的规范和约定。
S7通讯协议是西门子公司为S7系列PLC定义的一种通信协议,它规定了数据传输的格式、报文结构和校验方式等。
通过遵守通信协议,PLC可以与其他设备实现可靠的数据交换和通信。
3. 通信数据处理:通信数据处理是指PLC在接收和发送数据时的处理过程。
modbus rtu协议报文格式

modbus rtu协议报文格式【实用版】目录1.Modbus 协议简介2.Modbus RTU 报文格式3.Modbus RTU 报文实例分析4.Modbus RTU 通信物理接口5.Modbus RTU 在工业控制领域的应用正文一、Modbus 协议简介Modbus 协议是一种广泛应用于工业控制领域的通用通讯协议。
通过此协议,控制器相互之间或控制器经由网络(如以太网)可以和其他设备之间进行通信。
Modbus 协议使用的是主从通讯技术,即由主设备主动查询和操作从设备。
一般将主控设备方所使用的协议称为 Modbus Master,从设备方使用的协议称为 Modbus Slave。
典型的主设备包括工控机和工业控制器等;典型的从设备如 PLC 可编程控制器等。
Modbus 通讯物理接口可以选用串口(包括 RS232、RS485 和 RS422),也可以选择以太网口。
其通信方式主要有 Modbus ASCII(ASCII 字符方式进行发送)、Modbus RTU(Remote Terminal Unit,远程终端单元)和Modbus TCP/IP(以太网协议)等。
二、Modbus RTU 报文格式Modbus RTU 是一种远程终端单元通信方式,其报文格式包含了起始符、地址、数据、校验和、结束符等部分。
Modbus RTU 报文的起始符和结束符分别为 0x03 和 0x13,地址部分用于指示通信中的从设备地址,数据部分包含了要传输的信息,校验和部分用于检测数据传输中的错误。
三、Modbus RTU 报文实例分析以一个从设备地址为 0x01 的 Modbus RTU 报文为例,其报文格式如下:- 起始符(0x03)- 地址(0x01)- 命令码(0x06)- 写入的起始地址(0x00 0x01)- 写入的数据(0x00 0x00)- 校验和(0x0A)- 结束符(0x13)在这个例子中,命令码 0x06 表示读取保持寄存器的值,起始地址0x00 0x01 表示从地址 0x0001 开始读取,数据部分为 0x00 0x00,表示要读取的寄存器值为 0x0000。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
指令前 7 个字节不变,后字节数据格式如下:
起始 说明
帧2
控制字
数据 命令字
长度
数据 1
数据 68H
代码 备注
01H 固定
04H CMD
开、关 指令
01H 固定
数据 2
信息 1
结 校验
束 码
符
DATA2
NEWS1
CS 16H
固 调光等级 故障信息 计算
定
2/7
2.3、调光指令下行通讯协议说明
指令前 7 个字节不变,后字节数据格式如下:
3.1、开关指令下行通讯协议说明:
指令前 7 个字节不变,后字节数据格式如下:
起始 说明
帧2
控制码
数据 命令字
长度
数据 1
数据
68H
C
04H CMD DATA1
代码
备注
选择下行方 式
开、关 控制 1 调 指令 光等级
控制器 码
LAM.P
控制器 码
数据 2 校验码 结束符
DATA2
CS
16H
控制 2 调 计算
位
D4 D8 D12 D16 D20 D24 D28 D32 D36 D40
选
备注
择
实时
功率 功率
电压 电流 功率 电能 电压 电流 功率 电能
上
数据
因素 因素 计 固
1
1
1
1
2
2
2
2
行
查询
1
2 算定
数据 数据 数据 数据 数据 数据 数据 数据
起始
数据
控制码
命令字
帧2
长度
68H 01H 21H 48H DATA1 DATA2
固定
D1-D4 D5-D8
实时数
电压数 电流数
据查询
据
据
指令
数据 1
DATA3 DATA4 DATA5
D9-D12 D13-D16 D17-D20
功率
功率因 用电量
素
校验 码 CS
计算
结束符 16H
固定
2.9、基本实时故障上报通讯协议说明
光等级
3.2、开关指令上行通讯协议说明:
说明 数据 代码 备注
指令前 7 个字节不变,后字节数据格式如下:
起始 帧2
控制码
数据 状态 1 控制器码
长度
68H
C
LONG STATE1 LAMP
选择下行方 式
开、关 控制器码
状态
数据 1
DATA1 控制 1 调
光等级
状态 2 数据 2
STATE1 DATA2 各控制 控制 2 调 器状态 光等级
指令前 7 个字节不变,后字节数据格式如下:
起始
数据
控制
说明
控制码
状态 1
帧2
长度
器码
数据 1
状态 2
信息 1
数据 2
信息 2
校结 验束 码符
数据
68H
C
07H 45H 03H DATA1 STATE2 NEWS1 DATA3
NEWS2 CS 16H
代码
备注
选择下 行方式
状态查 控制 控制 1 调 各控制 控制 1 故 控制 2 调 控制 2 故 计 询 器码 光等级 器状态 障信息 光等级 障信息 算
1/7
1、基本通讯格式如下:
起始 说明
帧1
地址位
数
起控
校结
据 状态
始制
验束
长 数据
帧2 码
码符
度
数据代 68H 01H 02H 03H 04H 05H 06H 68H C
码
L DATA CS 16H
1字 字节数
节
6 字节
1字 1字 1字
1字 1字
不定
节节节
节节
固
固
备注
固定
定
定
备注 1:检验码 CS 值由计算产生,1 个字节,从起始帧 1 开始到结束符前的所有字节的
02H
备注
固定
命令字 47H
调光指令
数据Байду номын сангаас1
DATA1 调光等
级
校验 码 CS
计算
结束 符 16H
固定
2.5、状态查询指令下行通讯协议说明:
指令前 7 个字节不变,后字节数据格式如下:
说明 起始帧 2 控制码 数据长度
数据代
68H
01H
01H
码
备注
固定
命令字 校验码
45H
CS
状态查 询指令
计算
结束符 16H 固定
模 256 的和,即二进制算数和,不操作 256 的溢出值;
备注 2:后续的所有指令格式中,前 7 个字节保存不变,即:68 01 02 03 04 05 06 这 6
个字节将不会变化,每次的指令前面都将保持这 6 个字节;
备注 3:串口 UART 通讯,TTL 电平,3.3V,波特率 9600,偶检验,8 数据位,1 停止位;
控
起始
说明
制
帧2
码
数 据 命令 长字 度
控制 1 数据
控制 2 数据
功率 功率 校
结
因素 因素 验
束
1
2码
符
数据
DATA DATA DATA DATA DATA DATA DATA DATA DAT DATA CS
68H C 29H 48H
16H
代码
1
2
3
4
5
6
7
8 A9 10
数据
D1- D5- D9- D13- D17- D21- D25- D29- D33- D37-
3/7
2.7、实时数据查询指令下行通讯协议说明:
指令前 7 个字节不变,后字节数据格式如下:
说明 起始帧 2 控制码 数据长度
数据代
68H
01H
01H
码
备注
固定
命令字 校验码
48H
CS
数据查 询指令
计算
结束符 16H 固定
2.8、实时数据查询数据上行通讯协议说明
说明
数据 代码 数据
位
备注
指令前 7 个字节不变,后字节数据格式如下:
2.1、开关指令下行通讯协议说明:....................................................................................... 2 2.2、开关数据上行通讯协议说明:....................................................................................... 2 2.3、调光指令下行通讯协议说明............................................................................................3 2.4、调光数据上行通讯协议说明............................................................................................3 2.5、状态查询指令下行通讯协议说明:............................................................................... 3 2.6、状态查询数据上行通讯协议说明:............................................................................... 3 2.7、实时数据查询指令下行通讯协议说明:....................................................................... 4 2.8、实时数据查询数据上行通讯协议说明........................................................................... 4 2.9、基本实时故障上报通讯协议说明................................................................................... 4 3、双路控制通讯格式说明:...........................................................................................................5 3.1、开关指令下行通讯协议说明:....................................................................................... 5 3.2、开关指令上行通讯协议说明:....................................................................................... 5 3.3、状态查询下行通讯协议说明:....................................................................................... 5 3.4、状态查询数据上行通讯协议说明:............................................................................... 5 3.5、实时数据查询下行通讯协议说明:............................................................................... 6 3.6、实时数据查询数据上行通讯协议说明:....................................................................... 6 3.7、调光指令下行通讯协议说明............................................................................................6 3.8、调光数据上行通讯协议说明............................................................................................7 3.9、双路控制实时故障上报通讯协议说明........................................................................... 7