定时器中断与查询
定时器和中断

定时器和中断的应用前景
工业自动化
定时器和中断在工业自动化领域具有广泛 的应用前景,如生产线控制、机器人控制
等。
智能交通
在智能交通领域,定时器和中断可以实现 交通信号灯的智能控制和车辆的自动化调
度。
智能家居
在智能家居领域,定时器和中断可以实现 家电的智能控制和自动化管理,提高生活 品质。
医疗设备
在医疗设备领域,定时器和中断可以实现 医疗设备的自动化控制和精确计时,提高 医疗设备的可靠性和安全性。
定义
中断是一种硬件或软件事件,它能够打断正在执行的程序,并将其控制权交给 中断处理程序。
作用
中断是计算机系统中非常重要的机制,它使得CPU能够响应各种突发事件,如 硬件故障、外部信号、定时器超时等,从而实现多任务并发处理和实时性要求。
中断的分类
硬件中断
由硬件设备产生的中断,如键 盘输入、时钟中断等。
中断
用于需要实时响应的场景,如键盘输 入、串口通信等。
04
定时器的应用
BIG DATA EMPOWERS TO CREATE A NEW
ERA
定时器的使用场景
01
02
03
04
时间基准和同步
用于提供稳定的时间基准,如 系统时钟。
任务调度
用于安排任务在特定时间执行 。
性能测试和测量
用于测量代码执行时间或系统 性能。
网络定时器
用于网络通信的定时器, 如用于数据包发送间隔控 制的定时器。
定时器的工作原理
硬件定时器工作原理
基于硬件电路的定时器通常由振荡器和计数器组成,振荡器产生固定频率的脉冲信号,计 数器对脉冲信号进行计数,当计数达到预设值时,产生中断或触发信号。
单片机第六章定时器

这种方式下,计数寄存器由13位组成,即THx高八位(作计数器)
和TLx的低5位构成。TLx的高3位未用。
计数时,TLx的低5位溢出后向THx进位,THx溢出后 将TFx置位,并向CPU申请中断。
用软件控制,置 l时,启动 T1;清0时,停止 T1。
TF0(TCON.5)——T0的溢出标志。
TR0(TCON.4)——T0的运行控制位。
用软件控制,置1时,启动T0;清 0时,停止 T0。
• IE1(TCON.3)——外部中断1中断请求标志位。
• IE0(TCON.1)——外部中断0中断请求标志位。
器之外,还可用作串行接口的波特率发生器。
6.2
定时器/计数器T0、T1
T0、T1 的内部结构简图示于图6-1中。从图中 可以看出,T0、T1由以下几部分组成:
• 计数器TH0、TL0和TH1、TL1;
•
•
特殊功能寄存器TMOD、TCON;
时钟分频器;
•
输入引脚T0、T1。
6.2.1 与定时器/计数器T0、T1有关的 特殊功能寄存器
⑵定时器/计数器T1
T0方式3时,T1可以工作在方式0、1、2三种方式 T1的结构如图6–6所示。 由于T0占用了原来T1的启动位TR1和溢出标志TF1, 所以此时T1溢出时不能置位溢出标志,不能申请中断, 其溢出信号送给串行口,此时T1作为波特率发生器。
T1的启停由写入方式字控制,当写入方式0/1/2 时,T1立即启动,写入方式3 时,立即停止工作。
分析:设置T0工作在方式2,计数功能,每记满100个外 部脉冲,从P1.0输出一个低电平脉冲信号(简化的打包 操作)。
4_中断系统

3.1 TCON定时控制寄存器
TFl和TF0: 定时器1和定时器0的溢出标志。 当定时器计满产生溢出时,由硬件自动置 “1”,并可申请中断。进入中断服务程序后, 由硬件自动清0。 也可作为程序查询的标志位,在查询方式 下应由软件来清0。
3.1 TCON定时控制寄存器
TR1和TR0: 为定时器1和定时器0的启停控制位。 将TRx清0后,可停止定时器的工作。 将该位置“1”后,可启动定时器工作。
3.3 IE中断允许寄存器
D7 EA D6 D5 ET2 D4 ES D3 ET1 D2 EX1 D1 ET0 D0 EX0
EA:CPU中断总允许位。 ES :串行口中断允许位。 ET1:定时器1中断允许位。 EX1:外部中断1的中断允许位。 ET0:定时器0的中断允许位 EX0:外部中断0的中断允许位。 ET2:定时器2中断允许位
TCON定时控制寄存器ቤተ መጻሕፍቲ ባይዱSCON串行口控制寄存器 IE中断允许寄存器
IP中断优先级寄存器
3.1 TCON定时控制寄存器
作用: 控制定时器/计数器的启、停 外部中断源的触发方式 定时器的溢出中断标志 外部中断源的中断请求标志。 其地址为88H。
3.1 TCON定时控制寄存器
中断源的入口地址分别为: 外部中断0中断: 0003H 最高级 T0定时器0中断: 000BH 外部中断1中断: 0013H T1定时器l中断: 001BH 串行口输入/输出中断: 0023H 最低级 定时器2中断: 002BH 最低级(52系列单片 机中)
3 MCS-51单片机中断系统使用
MCS-51单片机中断控制部分由4个专用 寄存器组成:
中断系统
1 中断系统概述 2 MCS-51单片机的中断系统 3 MCS-51单片机中断系统使用 4 C51中中断系统的应用
中断技术实验报告-基本时钟和定时器
实验七、中断技术实验八、基本时钟和定时器实验报告实验七、中断技术一、实验目的1. 了解中断原理,包括对中断源、中断向量、中断类型号、中断程序以及中断相应过程的理解;2. 掌握单片机C语言中断程序设计方法。
二、实验任务1. 中断相应过程的理解(1)在中断子程序的定义之前,有一条预编译指令,观察其中的中断向量即可知道中断源。
如本程序中的预编译指令是“#pragma vector=PORT1_VECTOR”可知中断源是P1.0~P1.7的八个引脚(准确说应该是P1.3)。
在知道中断源的情况下,通过查表可以知道中断其对应的中断类型号是3。
从程序中看出中断标志位用的是Bit3,所以将P1.3与按键连接。
实验现象:当操作时,LED灯一直闪烁,当按下K4(与P1.3相连)时,灯停止闪烁,蜂鸣器响三声之后灯继续闪烁。
(2)port_ISR被在满足条件的时候被硬件执行,不受软件操控,所以程序中并没有调用这个函数的语句但是仍可以被执行。
中断响应过程:由于在该程序中用到的是可屏蔽中断,中断相应需要满足三个条件:中断总控位、中断分控位、中断源发出请求(即中断标志位置位)。
在程序中已经将中断总控位和分控位置于允许状态所以只需要中断标志位置位即可,所以当在按键的下降沿时(由P1.3作为中断源),中断标志位被置位,即P1IFG&BIT3被置位,则中断子程被硬件自动运行,也就是函数port_ISR被执行。
(3)当在运行完port_ISR时,如果中断标志位没有被清零则当跳出中断子程之后,由于依然满足中断相应的条件,所以中断会被继续执行,即中断将被一直运行下去。
(4)在将PORT1_VECTOR改为PORT2_VECTOR之后在单片机上运行,发现按键不再能够使蜂鸣器响起,但是按键时原来闪烁的LED灯会暂停非常短暂的时间。
这说明在按键时虽然程序暂时中断,但是并没有去执行中断子程里面的东西。
在main函数入口处加入一断点时,按键时原来闪烁的LED灯会停止闪烁,并且程序会停止在断点处。
中断与定时器和计数器实验

中断与定时器和计数器实验一、实验目的:1.掌握单片机的中断的原理、中断的设置,掌握中断的处理及应用2.掌握单片机的定时器/计数器的工作原理和工作方式,学会使用定时器/计数器二、实验内容:(一)、定时器/计数器应用程序设计实验1.计数功能:用定时器1方式2计数,每计数满100次,将P1.0取反。
(在仿真时,为方便观察现象,将TL1和TH1赋初值为0xfd,每按下按键一次计数器加1,这样3次就能看到仿真结果。
)分析:外部计数信号由T1(P3.5)引脚输入,每跳变一次计数器加1,由程序查询TF1。
方式2有自动重装初值的功能,初始化后不必再置初值。
将T1设为定时方式2,GATE=0,C/T=1,M1M0=10,T0不使用,可为任意方式,只要不使其进入方式3即可,一般取0。
TMOD=60H。
定时器初值为X=82-100=156=9CH,TH1=TL1=9CH。
(1)硬件设计硬件设计如图所示(2)C源程序#include "reg51.h" sbit P1_0=P1^0;void main(){TMOD=0x60;TH1=0xfd;TL1=0xfd;TR1=1;ET1=1;while(1){if(TF1==1){P1_0=~P1_0;TF1=0;}}}(3)proteus仿真通过Keil编译后,利用protues软件进行仿真。
在protues ISIS 编译环境中绘制仿真电路图,将编译好的“xxx.hex”文件加入AT89C51。
启动仿真,观察仿真结果。
(二)中断应用程序设计实验2.中断定时使用定时器定时,每隔10s使与P0、P1、P2和P3端口连接的发光二极管闪烁10次,设P0、P1、P2和P3端口低电平灯亮,反之灯灭。
分析:中断源T0入口地址000BH;当T0溢出时,TF0为1发出中断申请,条件满足CPU响应,进入中断处理程序。
主程序中要进行中断设置和定时器初始化,中断服务程序中安排灯闪烁;TL0的初值为0xB0,TH0的初值为0x3C,执行200次,则完成10s定时。
天脉(ACoreOS)操作系统培训第六章:异常、中断与定时器
启动(或)重启动看门定时器
STATUS wdStart (WDOG_ID wdId, int delay,
FUNCPTR pRoutine,int parameter )
wdId 看门狗ID,由创建wdCreate返回源自delay 延时的tick值
pRoutine 延时时间到时调用程序
23 parameter
wdStart() + semGive():更加健壮
28
查询警告
下列代码是正确的,只有当系统时钟频率是15Hz 的整数倍
void myWdISR() {
wdStart(myWdId,sysClkRateGet()/15,myWdISR,0); pollMyDevice(); }
为了防止系统在每个时钟tick开销过大,不能 够将系统时钟频率设置过高
中断的工作原理
10
中断处理示例-PowerPC
11
中断处理示例说明
PowerPC有单独的外部中断引脚。板级支持包 (BSP)可以支持外部中断控制器实现中断嵌套。
中断表中中断入口数量取决于BSP中中断控制器的 能力。目前中断向量表最多可支持256个。
外部中断的处理流程
保存CPU寄存器 从中断控制器中读取中断号 调用用户连接的中断处理程序(用户关心) 清中断控制器状态 12 恢复CPU寄存器并返回
fooDoWork()必须每 10秒运行,如果执行小 于10秒钟,看门狗重新 启动(fooISR()没有被 调用)。如果 fooDoWork()执行时间 超过10秒钟,则看门狗 程序fooISR()将被调用 处理紧急事件
停止看门狗
取消先前启动的看门狗 STATUS wdCancel (WDOG_ID wdId)
单片机中的中断与定时器的原理与应用
单片机中的中断与定时器的原理与应用在单片机(Microcontroller)中,中断(Interrupt)和定时器(Timer)是重要的功能模块,广泛应用于各种嵌入式系统和电子设备中。
本文将介绍中断和定时器的基本原理,并探讨它们在单片机中的应用。
一、中断的原理与应用中断是指在程序执行过程中,当发生某个特定事件时,暂停当前任务的执行,转而执行与该事件相关的任务。
这样可以提高系统的响应能力和实时性。
单片机中的中断通常有外部中断和定时中断两种类型。
1. 外部中断外部中断是通过外部触发器(如按钮、传感器等)来触发的中断事件。
当外部触发器发生状态变化时,单片机会响应中断请求,并执行相应的中断服务程序。
外部中断通常用于处理实时性要求较高的事件,如按键检测、紧急报警等。
2. 定时中断定时中断是通过定时器来触发的中断事件。
定时器是一种特殊的计时设备,可以按照设定的时间周期产生中断信号。
当定时器倒计时完成时,单片机会响应中断请求,并执行相应的中断服务程序。
定时中断常用于处理需要精确计时和时序控制的任务,如脉冲计数、PWM波形生成等。
中断的应用具体取决于具体的工程需求,例如在电梯控制系统中,可以使用外部中断来响应紧急停车按钮;在家电控制系统中,可以利用定时中断来实现定时开关机功能。
二、定时器的原理与应用定时器是单片机中的一个重要模块,可以用于计时、延时、频率测量等多种应用。
下面将介绍定时器的工作原理和几种常见的应用场景。
1. 定时器的工作原理定时器是通过内部时钟源来进行计时的。
它通常由一个计数器和若干个控制寄存器组成。
计数器可以递增或递减,当计数值达到设定值时,会产生中断信号或触发其他相关操作。
2. 延时应用延时是定时器最常见的应用之一。
通过设定一个合适的计时器参数,实现程序的精确延时。
例如,在蜂鸣器控制中,可以使用定时器来生成特定频率和持续时间的方波信号,从而产生不同的声音效果。
3. 频率测量应用定时器还可以用于频率测量。
计数器定时查询的工作原理

计数器定时查询的工作原理一、引言计数器定时查询是一种常见的计时方式,常用于嵌入式系统中。
其工作原理是利用计数器进行计数,并在特定的时间间隔内查询计数器的值,从而实现定时功能。
本文将详细介绍计数器定时查询的工作原理。
二、计数器计数器是一种数字电路,主要用于对信号进行计数。
它可以通过输入一个时钟信号来进行计数,并将结果输出。
在嵌入式系统中,常用的计数器有基于硬件的定时器和基于软件的延时函数。
三、定时器定时器是一种特殊类型的计数器,它可以在特定时间间隔内自动进行计数,并触发相应的中断或事件。
在嵌入式系统中,常用的定时器有基于硬件的定时器和基于软件的延时函数。
四、硬件定时器硬件定时器是通过外部晶体振荡电路提供稳定的时间基准来实现精确计时。
其工作原理是通过预设寄存器设置一个初始值,并从外部晶体振荡电路接收一个固定频率(通常为1MHz)的脉冲信号作为输入信号。
每当接收到一个脉冲信号,就会将初始值减1,直到计数器的值为0时触发中断或事件。
通过调整初始值和输入信号的频率,可以实现不同的定时功能。
五、软件延时函数软件延时函数是通过程序控制来实现计时的一种方式。
其工作原理是利用CPU的执行速度和延时循环来实现定时功能。
在嵌入式系统中,常用的软件延时函数有基于循环计数和基于定时器中断两种方式。
六、基于循环计数的软件延时函数基于循环计数的软件延时函数是通过程序循环执行一定次数来实现计时功能。
其工作原理是设置一个计数器,每执行一次循环就将计数器减1,直到计数器减为0后退出循环。
通过调整计数器初值和每次减1的时间间隔,可以实现不同的定时功能。
七、基于定时器中断的软件延时函数基于定时器中断的软件延时函数是通过在程序中设置一个定时器,在特定时间间隔内触发一个中断来实现计时功能。
其工作原理是设置一个预设寄存器作为中断触发阈值,并在程序中开启相应的中断服务程序(ISR)。
当预设寄存器减为0后触发中断,执行ISR中的延时函数,并重新设置预设寄存器的值。
定时器及中断(1秒基时
实验十二定时器及中断(1秒基时)一、实验目的1.通过实验了解定时器的工作原理、编程方法。
2.通过实验了解定时器工作方式、定时与计数、单启动与双重启动的选择。
3.掌握通过一个定时器加入软件计数产生1S基时的方法。
4.通过实验了解多个中断源申请中断的处理方法。
二、实验内容及实验电路及步骤1.产生1S延时的设计:(11.0592MHZ)方案1:定时器0定时加软件计数。
1)采用定时器0,方式1,定时50MS中断。
当1S 时间到后,使P1.0 闪亮。
一个机器周期为=(1/11.0592Mhz)*12us。
定时器0的定时初值=(65536-50000/(1/11.0592Mhz*12us))=(65536-46080)=19456=4C00H软件计数:计数器采用R2,计数20 次。
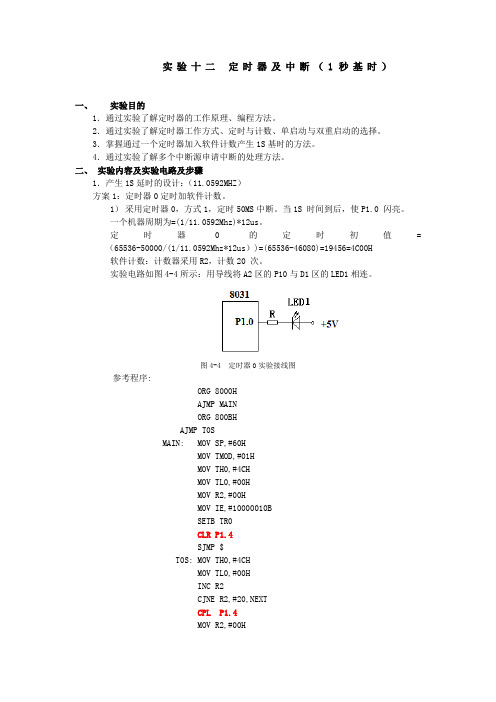
实验电路如图4-4所示:用导线将A2区的P10与D1区的LED1相连。
图4-4 定时器0实验接线图参考程序:ORG 8000HAJMP MAINORG 800BHAJMP T0SMAIN: MOV SP,#60HMOV TMOD,#01HMOV TH0,#4CHMOV TL0,#00HMOV R2,#00HMOV IE,#10000010BSETB TR0CLR P1.4SJMP $T0S: MOV TH0,#4CHMOV TL0,#00HINC R2CJNE R2,#20,NEXTCPL P1.4MOV R2,#00HNEXT:RETIEND注:机器LED1 LED2 LED3 LED4损坏,因此用排线讲A2区的J61接口与D1区的J52接口相连,程序中P1.0改为P1.4(使LED5亮)记录结果如下:(红色表示改变的数值)实验结果:LED灯间隔1秒钟灯闪亮一次结果参照视频012)采用定时器0,方式1,定时50MS,查询方式,当1S 时间到后,使P1.5闪亮。
用导线将A2区的P10与D1区的LED1相连。
参考程序:ORG 8000HAJMP MAINMAIN: MOV TMOD,#01H ;T/C0定时,方式1。
中断定时计数器课件

例 5 编写一段程序,功能要求为:当P1.0引脚的电平正跳变时,对P1.1的输入脉冲 进行计数;当P1.2引脚的电平负跳变时,停止计数,并将计数值写入R0、R1(高位 存R1,低位存R0)。 解答:将P1.1的输入脉冲接入INT0,即使用T0计数器完成对P1.1口的脉冲计数。编写程 序如下: ORG 0000H LJMP MAIN ORG 000BH LJMP IT0P MAIN: JNB P1.0,MAIN MOV TMOD,#05H ;定 时器/计数器T0为计数方式1 SETB TR0 ;启动T0,开 始计数 SETB ET0 ;允许T0中断 SETB EA ;CPU开中断 WAIT: JB CLR CLR MOV MOV AJMP INC RETI P1.2,WAIT EA TR0 R1,TH0 R0,TL0 $ R2
ORG 000BH CPL P1.0 MOV TL0, #9CH RETI ORG 001BH CPL P1.1 MOV TH0, #38H RETI ;TL0 中断服务程序 ;P1.0 取反 ;重新装入计数初值 ;中断返回 ;TH0 中断服务程序 ;P1.1取反 ;重新装入计数初值 ;中断返回
AJMP DEL REP:CPL P1.0 AJMP DEL ; ;若计数溢出,则输出取反
TINT0: JNB 20H.0,NEXT MOV TL0,#0B5H MOV TH0,#0FFH CLR P1.1 CPL 20H.0 SJMP LAST NEXT: MOV TL0,#0CEH MOV TH0,#0FFH SETB P1.1 CPL 20H.0 LAST:RETI
方法二: 采用方式2 定时器中断 加延时程序
ORG 0000H LJMP MAIN ORG 000BH LJMP IT0P MAIN: MOV TMOD,#02H;定时器/ 计数器T0为定时方式2 IT0P:CLR EA MOV TL0,#4AH;定时 CLR P1.0 ;关中断 364μs初值赋值 MOV R0,#9 ;延时26μs SETB TR0;启动T0,开始 DLY:DJNZ R0,DLY MOV TL0,#4AH ;定时364μs 计数 初值赋值 SETB ET0;允许T0中断 SETB P1.0 SETB EA;CPU开中断 SETB EA RETI SETB P1.0 WAIT: AJMP WAIT
单片机定时器 中断
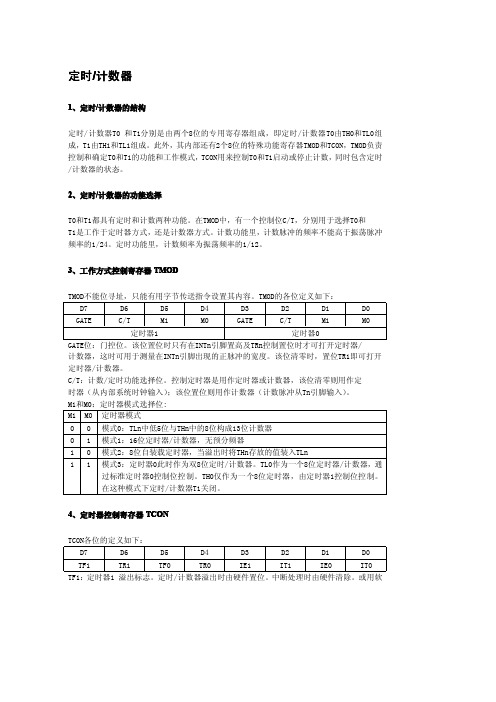
定时/计数器1、定时/计数器的结构定时/计数器T0和T1分别是由两个8位的专用寄存器组成,即定时/计数器T0由TH0和TL0组成,T1由TH1和TL1组成。
此外,其内部还有2个8位的特殊功能寄存器TMOD和TCON,TMOD负责控制和确定T0和T1的功能和工作模式,TCON用来控制T0和T1启动或停止计数,同时包含定时/计数器的状态。
2、定时/计数器的功能选择T0和T1都具有定时和计数两种功能。
在TMOD中,有一个控制位C/T,分别用于选择T0和T1是工作于定时器方式,还是计数器方式。
计数功能里,计数脉冲的频率不能高于振荡脉冲频率的1/24。
定时功能里,计数频率为振荡频率的1/12。
3、工作方式控制寄存器TMODTMOD不能位寻址,只能有用字节传送指令设置其内容。
TMOD的各位定义如下:D7D6D5D4D3D2D1D0 GATE C/T M1M0GATE C/T M1M0定时器1定时器0GATE位:门控位。
该位置位时只有在INTn引脚置高及TRn控制置位时才可打开定时器/计数器,这时可用于测量在INTn引脚出现的正脉冲的宽度。
该位清零时,置位TR1即可打开定时器/计数器。
C/T:计数/定时功能选择位。
控制定时器是用作定时器或计数器,该位清零则用作定时器(从内部系统时钟输入);该位置位则用作计数器(计数脉冲从Tn引脚输入)。
M1和M0:定时器模式选择位:M1M0定时器模式00模式0:TLn中低5位与THn中的8位构成13位计数器01模式1:16位定时器/计数器,无预分频器10模式2:8位自装载定时器,当溢出时将THn存放的值装入TLn11模式3:定时器0此时作为双8位定时/计数器。
TL0作为一个8位定时器/计数器,通过标准定时器0控制位控制。
TH0仅作为一个8位定时器,由定时器1控制位控制。
在这种模式下定时/计数器T1关闭。
4、定时器控制寄存器TCONTCON各位的定义如下:D7D6D5D4D3D2D1D0 TF1TR1TF0TR0IE1IT1IE0IT0 TF1:定时器1溢出标志。
Arduino定时器中断(TimerInterrupts)资料

Arduino定时器中断(TimerInterrupts)资料Arduino的定时器中断当你想让代码在一个固定的时间间隔后执行时,你可以很容易的用delay()函数来实现。
但是,这只是让程序暂停一个特定的时间段。
特别是如果你需要同时让处理器做其他处理时,这么做同时也是一种浪费。
这时候就是定时器(Timer)和中断(Interrupt)的用武之地了。
Arduino UNO有三个timertimer0 - 一个被Arduino的delay() ,millis() 和micros()使用的8位定时器timer1 - 一个被Arduino的Servo()库使用的16位定时器timer2 - 一个被Arduino的T one()库使用的8位定时器"Arduino Mega"板有另外三个可使用的timer3,4,5,而不是只有timer0,1,2在以下的例子中,我们将在我们的中断使用timer1。
显然,如果你用了Servo()库就会有冲突,所以你应该选择其他timer。
下面是一个基本的中断驱动程序。
这是基本的LED闪光灯程序。
但是现在我们用中断而不是delay()来每半秒开启和关闭LED灯一次,从而实现让LED每秒闪一次的效果。
/*timer1 中断实例LED闪光灯每秒闪亮一下*/#define ledPin 13 //设置输出口为13口int timer1_counter;void setup(){pinMode(ledPin, OUTPUT);//初始化定时器1noInterrupts(); //禁止所有中断TCCR1A = 0;TCCR1B = 0;//为我们的中断设置timer1_counter为正确的时间间隔// timer1_counter = 64911; //预加载timer1为65536-16MHz/256/100Hz// timer1_counter = 64286; //预加载timer1为65536-16MHz/256/50HZtimer1_counter = 34286; //预加载timer1为65536-16MHz/256/2HzTCNT1 = timer1_counter; //预加载timerTCCR1B |= (1 << CS12); //256 分频器(256 prescaler?)TIMSK1 |= (1 << TOIE1); //启用定时器溢出中断interrupts(); //允许所有中断}ISR(TIMER1_OVF_vect) //常规中断服务{TCNT1 = timer1_counter; //预加载timer digitalWrite(ledPin, digitalRead(ledPin) ^ 1);}void loop(){//你自己的程序}。
89C52数码管静态显示及定时器和中断应用
动态显示
动态显示的特点是将所有位数码管的段选线
并联在一起,由位选线控制是哪一位数码管有效。 选亮数码管采用动态扫描显示。所谓动态扫描显
示即轮流向各位数码管送出字形码和相应的位选,
利用发光管的余辉和人眼视觉暂留作用,使人的
感觉好像各位数码管同时都在显示。动态显示的
亮度比静态显示要差一些,所以在选择限流电阻 时应略小于静态显示电路中的。
TCON
IT0 1 0 IE0 1 ET0 1 TF0 IT1 1 0 IE1 1 ET1 1 TF1 EX0 1
IE
EA 1
IP
PX0 1 0 PT0 1 0 1
硬件查询
自 然 优 先 级 中断源 高 级
INT0 T0 INT1 T1 RX TX
中断入口
EX1 1
PX1 1 0 PT1 1 0 0 自 然 优 先 级 中断源
R 1K
11
7 4 2 1 10
89C52
DPY a f e g d b c
a b c d e f a f e g d
C2
5 3
P00 P01 P02 P03 P04 P05 P06 P07
P00 P01 P02 P03 P04 P05 P06 P07
1 2 3 4 5 6 7 8
g dp a a b c dp f e g d b c dp DPY 4-L E D
硬件查询
自 然 优 先 级 中断源 高 级
INT0 T0 INT1 T1 RX TX
中断入口
EX1 1
PX1 1 0 PT1 1 0 0 自 然 优 先 级 中断源
低 级
RI TI
ES 1 ≥1
PS 1 0
c51单片机中断详解
响应中断请求的条件
一、一个中断请求被响应,需满足以下 必要条件:
(1)IE寄存器中的中断总允许位EA=1。
(2)该中断源发出中断请求,即该中断源对应 的中 断请求标志为“1”。
(3)该中断源的中断允许位=1,即该中断没有 被屏蔽。
(4)无同级或更高级中断正在被服务。
二、中断响应的主要过程
中断源
或者用: MOV 0A8H,#8AH ;A8H为IE寄存器 字节地址
三、中断优先级寄存器IP 两个中断优先级,可实现两级中断 嵌套。如图所示:
每个中断源的中断优先级都是 由中断优先级寄存器IP中的相应位 的状态来控制的。 中断优先级寄存器IP,其字节地址 为B8H。
IP各个位的含义: (1)PS——串行口中断优先级
控制位 1:高优先级中断; 0:低优先级中断。
(2)PT1——定时器T1中断优先级控制位 1:高优先级中断; 0:低优先级中断。
(3)PX1——外部中断1中断优先级控制位 1:高优先级中断; 0:低优先级中断。
(4)PT0——定时器T0中断优先级控制位 1:高优先级中断; 0:低优先级中断。
(5)PX0——外部中断0中断优先级控制位 1:高优先级中断; 0:低优先级中断。
地址是固定的,不能改动。
例
三、中断处理 编写中断中断服务程序即可
四、中断返回
▪中断返回由专门的中断返回指令 RETI来实现。
五、中断请求的撤消 2.外部中断请求的撤消 (1)跳沿方式外部中断请求的撤消 是自动撤消的。 (2)电平方式外部中断请求的撤消。
六、外部中断的响应时间 外部中断的最短的响应时间为3
二、中断允许控制
中断允许控制寄存器IE
CPU对中断源的开放或屏蔽,由片内 的中断允许寄存器IE控制(两级控制)。 字节地址为A8H,可位寻址。格式如下:
实验4:定时与中断系统实验

实验四:定时与中断系统实验一、实训目的1.利用单片机的定时与中断方式,实现对信号灯的复杂控制。
2.通过定时器程序调试,学会定时器方式1的使用。
3.通过中断程序调试,熟悉中断的基本概念。
二、实验仪器、材料1.微型计算机(PⅣ以上)2.编程、汇编与模拟平台软件Keil uVision33.电子技术专业仿真软件protues运行平台4.单片机实训开发电路板三、实验内容和步骤1.定时器查询方式1)要求:信号灯循环显示,时间间隔为1秒。
2)方法:用定时器方式1编制1秒的延时程序,实现信号灯的控制。
系统采用12M晶振,采用定时器T1方式1定时50ms,用R3做50ms计数单元,其源程序可设计如下:ORG 0000HCONT:MOV R2,#07HMOV A,#0FEHNEXT:MOV P2,AACALL DELAYRL ADJNZ R2,NEXTMOV R2,#07HNEXT1:MOV P2,ARR AACALL DELAYDJNZ R2,NEXT1SJMP CONTDELAY:MOV R3,#14H ;置50ms计数循环初值MOV TMOD,#10H ;设定时器1为方式1MOV TH1,#3CH ;置定时器初值MOV TL1,#0B0HSETB TR1 ;启动T1LP1:JBC TF1,LP2 ;查询计数溢出SJMP LP1 ;未到50ms继续计数LP2:MOV TH1,#3CH ;重新置定时器初值MOV TL1,#0B0HDJNZ R3,LP1 ;未到1s继续循环RET ;返回主程序END2.定时器中断方式1)要求:信号灯循环显示,时间间隔为1秒。
2)方法:用定时器中断方式编制1秒的延时程序,实现信号灯的控制。
采用定时器T1中断定时50ms,用R3做50ms计数单元,在此基础上再用08H位作1s 计数溢出标志,主程序从0100H开始,中断服务程序名为CONT。
可设计源程序如下:ORG 0000H ;程序入口AJMP 0100H ;指向主程序ORG 001BH ;定时器T1中断入口AJMP CONT ;指向中断服务程序ORG 0100HMAIN:MOV TMOD,#10H ;置T1为工作方式1MOV TH1,#3CH ;置50ms定时初值MOV TL1,#0B0HSETB EA ;CPU开中断SETB ET1 ;定时器T1开中断SETB TR1 ;启动T1CLR 08H ;清1s计满标志位MOV R3,#14H ;置50ms循环初值DISP:MOV R2,#07HMOV A,#0FEHNEXT:MOV P2,AJNB 08H,$ ;查询1s时间到否CLR 08H ;清标志位RL ADJNZ R2,NEXTMOV R2,#07HNEXT1:MOV P2,AJNB 08H,$CLR 08HRR ADJNZ R2,NEXT1SJMP DISPCONT:MOV TH1,#3CH ;重置50ms定时初值MOV TL1,#0B0HDJNZ R3,EXIT ;判1s定时到否MOV R3,#14H ;重置50ms循环初值SETB 08H ;标志位置1EXIT:RETIEND四、实训总结与分析1.定时器查询方式和前面的实验相比,硬件电路一致,效果一样,但二者软件的编制方法不同。
实验三 定时器实验 实验报告

课程名称:单片机实验题目:实验三定时实验学生姓名:专业:电子信息科学与技术班级:学号:指导教师:张涛实验三 定时器实验一、实验目的1、掌握单片机系统定时器断的原理及使用方法。
二、实验原理 (一)、单片机定时器/计数器的结构 1.定时器/计数器组成框图8051单片机内部有两个16位的可编程定时器/计数器,称为定时器0(T0)和定时器1(T1),可编程选择其作为定时器用或作为计数器用。
此外,工作方式、定时时间、计数值、启动、中断请求等都可以由程序设定,其逻辑结构如图所示。
_____INT1(P3.3)_____INT0(P3.2)T1(P3.5)T0(P3.4)图 8051定时器/计数器逻辑结构图由图可知,8051定时器/计数器由定时器 T0、定时器T1、定时器方式寄存器TMOD 和定时器控制寄存器TCON 组成。
2.定时/计数器的方式寄存器和控制寄存器定时/计数器的初始化通过定时/计数器的方式寄存器TMOD 和控制寄存器TCON 完成。
1)定时/计数器方式寄存器TMODTMOD 为T1、T2的工作方式寄存器,其格式如下:TMOD D7 D6 D5 D4 D3 D2 D1 D0(89H) TMOD 的低 (1(2)T /C :功能选择位。
0/C =时,设置为定时器工作方式;1/C =时,设置为计数器工作方式。
(3)GATE :门控位。
当GA TE=0时,软件控制位TR0或TR1置1即可启动定时器;当GATE=1时,软件控制位TR0或TR1须置1,同时还须0INT (P3.2)或1INT (P3.3)为高电平方可启动定时器,即允许外中断0INT 、1INT 启动定时器。
TMOD 不能位寻址,只能用字节指令设置定时器工作方式,高4位定义T1,低4位定义T0。
复位时,TMOD 所有位均置0。
2)定时器/计数器控制寄存器TCONTCON 的作用是控制定时器的启动、停止,标志定时器的溢出和中断情况。
定时器控制字TCON 的格式如下:TCON (88H ) 8FH 8EH 8DH 8CH 8BH 8AH 89H 88H(1) TCON.7 TF1:定时器1溢出标志位。
单片机定时器-计数器实验总结

单片机定时器-计数器实验总结单片机定时器/计数器实验总结篇一:单片机实验之定时器计数器应用实验一一、实验目的1、掌握定时器/计数器定时功能的使用方法。
2、掌握定时器/计数器的中断、查询使用方法。
3、掌握Prteus软件与Keil软件的使用方法。
4、掌握单片机系统的硬件和软件设计方法。
二、设计要求1、用Prteus软件画出电路原理图,单片机的定时器/计数器以查询方式工作,在P1.0口线上产生周期为200μS的连续方波,在P1.0口线上接示波器观察波形。
2、用Prteus软件画出电路原理图,单片机的定时器/计数器以中断方式工作,在P1.1口线上产生周期为240μS的连续方波,在P1.1口线上接示波器观察波形。
三、电路原理图六、实验总结通过这次实验,对定时器/计数器的查询工作方式有了比较深刻的理解,并能熟练运用。
掌握定时器/计数器的中断、查询使用方法。
对于思考题能够运用三种不同思路进行编程。
七、思考题1、在P1.0口线上产生周期为500微秒,占空比为2:5的连续矩形波。
答:程序见程序清单。
四、实验程序流程框图和程序清单1、以查询方式工作,在P1.0 RG 0000H START: LJMP MAIN RG 0100H MAIN: MV IE, #00H MV TMD, #02H MV TH0, #9CH MV TL0, #9CH SETB TR0 LP: JNB TF0, LP CLR TF0 CPL P1.0 AJMP LP END2、以中断方式工作,在P1.1 RG 0000H START: LJMP MAIN RG 000BH LJMP TTC0 RG 0100H MAIN: MV TMD, #02H MV TH0, #88H MV TL0, #88H SETB EA SETB ET0 SETB TR0 HERE: LJMP HERE RG 0200H TTC0: CPL P1.1 RETI END3、在P1.0口线上产生周期为500微秒,占空比为2:5的连续矩形波 RG 0000H START: LJMP MAIN RG 0100H MAIN: MV IE, #00H MV TMD, #20H MV TH1, #38H MV TL1, #38H MV TH0, #0F6H MV TL0, #14H LP1: SETB TR1 LP2: JNB TF1, LP2 CLR TF1 CLR TR1 CPL P1.0 SETB TR0 LP3: JNB TF0, LP3 MV TH0, #0F6H MV TL0, #14H CLR TF0 CLR TR0 CPL P1.0 LJMP LP1 END RG 0000H START: LJMP MAIN RG 0100H MAIN: MV IE, #00H MV TMD, #20H MV TH1, #38H MV TL1, #38H MV TH0, #0F0H MV TL0, #0CH SETB TR0 LP1: SETB TR1 LP2: JNB TF1, LP2 CLR TF1 CLR TR1 CPL P1.0 SETB TR0 LP3: JNB TF0, LP3 CLR TF0 MV TH0, #0F0H MV TL0, #0CH CPL P1.0 LJMP LP1 END RG 0000H START: LJMP MAIN RG 0100H MAIN: MV IE, #00H MV TMD, #00H LP1: MV TH1, #0F9H MV TL1, #18H SETB TR1 LP2: JNB TF1, LP2 CLR TF1 CPL P1.0 MV TH1, #0F6H MV TL1, #14H LP3: JNB TF1, LP3 CLR TF1 CPL P1.0 LJMP LP1 END五、实验结果(波形图)篇二:单片机实验-定时器计数器应用实验一定时器/计数器应用实验一一、实验目的和要求1、掌握定时器/计数器定时功能的使用方法。
5 定时计数器
主程序
定时器T1溢 出中断服 务子程序
单片微机 原理与应用 编程实现在P1.0引脚上输出周期为2ms的方波。
例5-3 利用T0的工作模式0产生1ms的定时,
设单片机的晶振频率ƒosc=12MHz。 解: 方法:定时1ms,对P1.0取反,然后继续定时 (1)设置模式字 2ms TMOD= **** 0000B =00000000B=00H 1ms (2)计算初值
单片微机 原理与应用
5. 3. 3 模式2及其应用
一、模式2时的结构和工作原理
与以前模式区别在于: 可连续计数 计数器为8位自动重装初值计数器,在循环定时 或计数时,不必反复预置计数初值。
单片微机 原理与应用
二、特短, 计数值N和定时时间t的计算 : N= 28- 初值X t=(28- 初值X) *机器周期Tcy 最大计数值为: 28 =256 说明:通常使用定时期T1工作在模式2作为串口 的波特率发生器。
单片微机 原理与应用
单片微机 三、应用举例 原理与应用 例5-1 使用定时器T0定时时间为1ms,选择工 作模式0,ƒosc=6MHz。试确定T0初值,计算最大 定时时间T。
解: (1)求T0的初值X 由公式:t=(213-T0初值)*机器周期Tcy t=1ms=1000μs 机器周期Tcy=12/ƒosc=12/6000000s=2μs 得 1000=( 213 -X)*2 所以初值 X=8192-500=7692=1111000001100B (一定要写全13位) TL0: 00001100B=0CH TL0的低5位和TH0的8位 TH0:11110000B=F0H
因Tcy=1μs,得 10000= (216-X)*1, 10000=65536-X X=55536=D8F0H
单片机实验_中断、定时器

理工大学实验报告(模板)实验时间:年月日星期时间::~ :实验室(房间号):实验台:班级::指导教师签字:成绩:实验三外部中断/INT0实验一、实验目的和要求学习、掌握单片机的中断原理。
正确理解中断矢量入口、中断调用和中断返回的概念与物理过程。
学习编写“软件防抖”程序,了解“软件防抖”原理。
对/int0、/int1两个外部中断进行编程,其中:●主程序的功能:LDE灯“全亮”、“全灭”交替进行 --------(状态2);●Int0中断服务程序功能:2个相邻的LED灯被点亮且循环左移(状态0);●Int1中断服务程序功能:1个LED灯被点亮且循环右移 ---(状态1);【注意】:实验仪上的LED灯物理位置最左侧为d0;最右侧为d7。
二、实验算法1 在主程序中利用CPL P3.3的指令驱动其电平不断地转换(由逻辑笔电路做程序状态监视)。
2 在中断服务程序中将P3.3置位(P3.3=1),实现对计数器“加1”并(通过P1口)显示的功能。
3 中断结束后回到主程序,程序继续对P3.3的电平不断取反。
三、实验电路图四、实验流程图主程序入口INT0入口设置中断允许P3.2置1设置中断优先级调用延时子程序设TCON 计数器加一并显示CLR A开中断(P0)—(A) P3.2=0?调用延时子程序调用延时子程序(A)—(A) RETI INT1同理五、程序清单ORG 0000HLJMP STARTORG 0003HLJMP INT_0ORG 0013HLJMP INT_1ORG 0100H ;主程序START: MOV SP,#60HMOV IE,#85HMOV IP,#04HMOV TCON,#05HLP1: M OV P0,ALCALL DELAYCPL ASJMP LP1INT_0: PUSH PSW ;中断T0入口PUSH ACCLCALL DELAYMOV A,#3FHLP2: M OV P0,ARR ALCALL DELAYSETB P3.2JNB P3.2,LP2LCALL DELAYPOP ACCPOP PSWRETIINT_1: PUSH PSW ;中断T1入口PUSH ACCLCALL DELAYLP3: M OV P0,ARL ALCALL DELAYSETB P3.3JNB P3.3,LP3LCALL DELAYPOP ACCPOP PSWRETIDELAY: PUSH 02HPUSH 03HMOV R2,#00HDL1: MOV R3,#00H DJNZ R3,$DJNZ R2,DL1POP 03HPOP 02HRETEND六、实验结果与分析LED灯按程序设计的规则亮灭,可调至3个状态,两个中断分高低优先级,实验成功。
51单片机(STC89C52)的中断和定时器

51单⽚机(STC89C52)的中断和定时器STC89C51/STC89C52 Timer内部不带振荡源, 必须外接晶振采⽤11.0592MHz,或22.1184MHz,可⽅便得到串⼝通讯的标准时钟.STC89和STC90系列为12T, STC11/STC12系列为1T, 也就是⼀个指令⼀个机器周期, 这些都需要外置晶振; STC15系列有内置晶振.中断中断允许控制寄存器 IE字节地址A8H, CPU对中断系统所有中断以及某个中断源的开放和屏蔽是由中断允许寄存器IE控制的D7D6D5D4D3D2D1D0EA—ET2ES ET1EX1ET0EX0EA (IE.7): 整体中断允许位, 1:允许ET2(IE.5): T2中断允许位, 1:允许(for C52)ES (IE.4): 串⼝中断允许位, 1:允许ET1(IE.3): T1中断允许位, 1:允许EX1(IE.2): 外部中断INT1允许位, 1:允许ET0(IE.1): T0中断允许位, 1:允许EX0(IE.0): 外部中断INT0允许位, 1:允许52单⽚机⼀共有6个中断源, 它们的符号, 名称以及各产⽣的条件分别如下1. INT0 - 外部中断0, 由P3.2端⼝线引⼊, 低电平或下降沿引起2. INT1 - 外部中断1, 由P3.3端⼝线引⼊, 低电平或下降沿引起3. T0 - 定时器/计数器0中断, 由T0计数器计满回零引起4. T1 - 定时器/计数器1中断, 由T1计数器计满回零引起5. T2 - 定时器/计数器2中断, 由T2计数器计满回零引起 <--这个是52特有的6. TI/RI - 串⾏⼝中断, 串⾏端⼝完成⼀帧字符发送/接收后引起定时器中断51单⽚机内部共有两个16位可编程的定时器,即定时器T0和定时器T1, 52单⽚机内部多⼀个T2定时器. 它们既有定时功能,也有计数功能。
可通过设置与它们相关的特殊功能寄存器选择启⽤定时功能还是计数功能. 这个定时器系统是单⽚机内部⼀个独⽴的硬件部分,它与CPU和晶振通过内部某些控制线连接并相互作⽤,CPU⼀旦设置开启定时功能后,定时器便在晶振的作⽤下⾃动开始计时,但定时器的计数器计满后,会产⽣中断。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
while (1);
}
通讯查询
#include "design.h"
void initial();
void pulse8()
{ unsigned char i;
for(i=8;i>0;i--)
{
CLK=1;
CLK=0;
kn++; if (kn>9) kn=0;
}
void main()
{
initial();
TMOD=0x21;
TH0=(65536-100*1000/2)/256;
TL0=(65536-100*1000/2)%256;x02;
TR1=1;
ES=1; EA=1;
for(l=0;l<10000;l++);
RI=0 ;
while(1)
{
for (j=0; j<4; j++)
{
temp=XBYTE[DISP_area+j];
pulse8();
{
temp=XBYTE[DISP_area+j];
pulse8();
}
ST=1; ST=0;
while(!RI);RI=0;
k=SBUF;
XBYTE[DISP_area+0]=DIGITTAB[k];
while(!RI);RI=0;
k=SBUF;
TL0=(65536-100*1000/2)%256;
}
k++; if (k>9) k=0;
}
}
中断
#include "design.h"
unsigned char kn;
unsigned int ln;
void initial();
}
void UART_service() interrupt 4
{
if(RI)
{
RI=0;
accp=SBUF;
SBUF=9-accp;
}
else
{
TI=0;
}
}
void main()
{
TL0=(65536-100*1000/2)%256;
ln++;
if(ln<30000)
return ;
ln=0;
XBYTE[DISP_area+0]=DIGITTAB[kn];
XBYTE[DISP_area+1]=DIGITTAB[kn];
TH1=TL1=(uchar)((float)256-(float)Fosc*1000000/((float)192*9600));
TR1=1;
for(l=0;l<10000;l++);
RI=0 ;
while(1)
{
for (j=0; j<4; j++)
{
temp=XBYTE[DISP_area+j];
pulse8();
}
ST=1; ST=0;
for (l=0; l<30000; l++);
{
while (!TF0) ;
TF0=0;
TH0=(65536-100*1000/2)/256;
XBYTE[DISP_area+2]=DIGITTAB[kn];
XBYTE[DISP_area+3]=DIGITTAB[kn];
for (j=0; j<4; j++)
{
temp=XBYTE[DISP_area+j];
pulse8();
}
ST=1; ST=0;
定时器查询
#include "design.h"
void initial();
void pulse8()
{ unsigned char i;
for(i=8;i>0;i--)
{
CLK=1;
CLK=0;
}
}
void main()
{
unsigned char j,k,temp;
XBYTE[DISP_area+0]=DIGITTAB[k];
XBYTE[DISP_area+1]=DIGITTAB[k];
XBYTE[DISP_area+2]=DIGITTAB[k];
XBYTE[DISP_area+3]=DIGITTAB[k];
for (j=0; j<4; j++)
unsigned int i=6666;
long l;
initial();
TMOD=0X21;
TH0=(65536-100*1000/2)/256;
TL0=(65536-100*1000/2)%256;
TR0=1;
k=0;
while(1)
{
XBYTE[DISP_area+1]=DIGITTAB[k];
while(!RI);RI=0;
k=SBUF;
XBYTE[DISP_area+2]=DIGITTAB[k];
while(!RI);RI=0;
k=SBUF;
XBYTE[DISP_area+3]=DIGITTAB[k];
}
ST=1; ST=0;
k=accp;
XBYTE[DISP_area+0]=DIGITTAB[k];
XBYTE[DISP_area+1]=DIGITTAB[k];
XBYTE[DISP_area+2]=DIGITTAB[k];
XBYTE[DISP_area+3]=DIGITTAB[k];
}
}
void main()
{
unsigned char j,k,temp;
unsigned int i=dispdata;
long l;
SCON=0x50;
TMOD=0X21;
PCON=0x80;
//TH1=TL1=256-fosc/192/baud_rate;
unsigned char j,k,temp;
long l;
SCON=0x50;
TMOD=0X21;
PCON=0x80;
//TH1=TL1=256-fosc/192/baud_rate;
TH1=TL1=(uchar)((float)256-(float)Fosc*1000000/((float)192*9600));
void pulse8()
{ unsigned char i;
for(i=8;i>0;i--)
{
CLK=1;
CLK=0;
}
}
void TO_servise() interrupt 1
{ unsigned char j,temp;
TH0=(65536-100*1000/2)/256;
}
}
}
}
中断
#include "design.h"
unsigned char accp;
void initial();
void pulse8()
{ unsigned char i;
for(i=8;i>0;i--)
{
CLK=1;
CLK=0;
}