4、基于FPGA的步进电机细分驱动控制设计
《基于FPGA控制的步进电机细分驱动器的设计与现实》范文

《基于FPGA控制的步进电机细分驱动器的设计与现实》篇一一、引言步进电机作为现代自动化系统中的关键元件,广泛应用于精密定位、自动化装配和机器人技术等领域。
步进电机驱动器是控制步进电机运动的核心部件,而基于FPGA(现场可编程门阵列)控制的步进电机细分驱动器则因其高集成度、可编程性和高性能等特点,逐渐成为研究热点。
本文将详细介绍基于FPGA控制的步进电机细分驱动器的设计与实现过程。
二、系统设计概述本系统设计的主要目标是实现步进电机的细分驱动,以提高电机的运动精度和稳定性。
系统主要由FPGA控制器、步进电机、驱动电路和电源电路等部分组成。
其中,FPGA控制器负责接收上位机指令,对步进电机的运动进行精确控制;驱动电路则负责将FPGA控制器的输出信号转换为电机所需的驱动信号。
三、硬件设计1. FPGA控制器设计FPGA控制器是本系统的核心部件,其设计主要包括接口电路、控制逻辑和存储器等部分。
接口电路负责与上位机进行通信,接收控制指令;控制逻辑则根据指令对步进电机的运动进行精确控制;存储器用于存储程序和数据。
2. 驱动电路设计驱动电路是连接FPGA控制器和步进电机的桥梁,其设计需要考虑电机的驱动要求、电源电压和电流等因素。
本系统采用H 桥驱动电路,通过控制H桥的通断来实现电机的正反转和停转。
3. 电源电路设计电源电路负责为整个系统提供稳定的电源电压。
本系统采用开关电源和线性电源相结合的方式,以保证电源的稳定性和可靠性。
四、软件设计1. FPGA程序设计FPGA程序是控制步进电机运动的关键,其设计主要包括电机控制算法、通信协议和驱动程序等部分。
本系统采用Verilog HDL语言编写FPGA程序,通过编程实现对步进电机的精确控制。
2. 上位机软件设计上位机软件负责发送控制指令给FPGA控制器,其设计主要包括通信接口、控制界面和指令生成等部分。
本系统采用C语言编写上位机软件,通过串口或网络与FPGA控制器进行通信,实现对步进电机的远程控制。
基于FPGA控制的步进电机细分驱动系统的开题报告

基于FPGA控制的步进电机细分驱动系统的开题报告一、选题背景及意义随着工业自动化和数字化的迅猛发展,越来越多的机械设备使用步进电机作为执行元件,以达到高效、精准、低噪声的运动控制。
但是现实工程中,常常需要对步进电机进行细分控制,以提高马达的运动精度和平滑度,进而提高机械系统的运动性能和工作效率。
因此,设计一套可靠的步进电机细分驱动系统是有意义的。
二、研究内容和目标本课题基于FPGA控制的思路,通过对步进电机的驱动方式和控制策略建模,利用FPGA芯片处理器进行实时控制和数据处理,设计出一种高性能、高可靠性的步进电机细分驱动系统。
具体研究内容如下:1. 研究步进电机的基本原理和驱动方式;2. 建立步进电机的数学模型,探究细分驱动的原理及其实现方法;3. 设计一个基于FPGA芯片的步进电机细分控制器,实现驱动信号的实时处理、数据的输入输出和控制算法的运行;4. 编写FPGA代码和控制程序,测试马达和控制器性能并进行性能评价。
三、研究方法和技术路线本研究主要采用以下方法和技术来实现步进电机细分驱动系统:1. 研究资料法:对现有的步进电机驱动系统和FPGA控制器进行现场调研和研究资料收集,明确研究方向和研究目标。
2. 数学建模法:针对步进电机的运动特性和控制需求,构建步进电机的数学模型,并分析其细分驱动策略和控制算法。
3. 硬件设计法:基于FPGA芯片的控制器设计,包括芯片选型、电路设计、PCB设计、硬件调试和性能测试等。
4. 软件编程法:利用高级编程语言和编译器,编写FPGA控制器的控制程序,实现控制指令下发、数据传输和控制算法执行等功能。
技术路线1. 步进电机驱动原理和数学建模;2. FPGA硬件设计和电路调试;3. Verilog HDL代码编写和仿真;4. 系统测试和性能评价。
四、预期成果和应用价值1. 设计出一套可靠的基于FPGA控制的步进电机细分驱动系统,有效提高步进电机的运动精度和平滑度。
2. 实现马达位置反馈、轴向细分控制和速度、加速度控制等复杂控制算法。
基于FPGA的四相步进电机细分驱动电路设计

基于FPGA 的四相步进电机细分驱动电路设计黄伟平(浙江树人大学,浙江省杭州市)摘要:在采用步进电机驱动的机构中,为了提高定位精度,提出了一种基于FPGA 的四相步进电机细分驱动电路的设计方案。
采用正弦/ 余弦细分方案,通过嵌入cos/ sin 表格于FPGA 中,合理控制步进电机四相绕组的电流,实现正弦细分驱动控制技术,减小了步距角、提高了步进分辨率。
给出了FPGA 软件设计,并在Quartus II中完成了仿真。
仿真结果表明,PWM计数器模块,地址计数器模块,PWM波形ROM存储器模块,数字比较器模块,都可以由FPGA 准确无误地产生,本系统最终现实对四相步进电机八细分驱动电路的设计。
关键词:FPGA ;四相步进电机;细分;驱动电路引言步进电机是把脉冲信号转换成角位移或直线位移的执行元件,是一种输出与输入数字脉冲相对应的增量驱动元件。
具有定位精度高、惯性小、无积累误差、启动性能好、易于控制、价格低廉及与计算机接口方便等优点,被广泛应用于数控系统中[1,2]。
计算机技术的发展,促进了数字控制技术的发展。
步进电机细分驱动技术可以减小步进电机的步距角,提高电机运行的平稳性,增加控制的灵活性等。
利用FPGA中的嵌入式EAB可以构成存放电机各相电流所需的控制波形表,再利用数字比较器同步产生多路FPGA电流波形,对多相步进电机进行控制。
若改变控制波形表的数据、增加计数器和比较器的位数,提高计数精度,就可以提高PWM波形的细分精度,进而对步进电机的步进转角进行任意级细分,实现转角的精确控制。
1.步进电机细分驱动原理步进电机的驱动是靠给步进电机的各相励磁绕组轮流通以电流,实现步进电机内部磁场合成方向的变化来使步进电机转动的。
设矢量Ta、Tb、Tc、Td为步进电机A、B、C、D四相励磁绕组分别通电时产生的磁场矢量;Tab、Tbc、Tcd、Tda为步进电机中AB、BC、CD、DA两相同时通电产生的合成磁场矢量。
《基于FPGA控制的步进电机细分驱动器的设计与现实》范文

《基于FPGA控制的步进电机细分驱动器的设计与现实》篇一一、引言步进电机是一种常见的电机类型,其具有精度高、运行平稳、易于控制等优点,广泛应用于各种自动化设备和精密机械系统中。
然而,传统的步进电机驱动器在细分控制方面存在一定局限性,无法满足高精度和高性能的应用需求。
因此,本文提出了一种基于FPGA(现场可编程门阵列)控制的步进电机细分驱动器设计方法,以提高步进电机的运行性能和控制精度。
二、背景及意义随着工业自动化和精密机械系统的发展,步进电机作为一种常用的驱动装置,在各种设备中得到了广泛应用。
然而,传统的步进电机驱动器在细分控制方面存在一定局限性,如控制精度低、运行效率低等问题。
为了解决这些问题,人们开始研究基于FPGA的步进电机细分驱动器设计方法。
FPGA具有可编程、高速度、低功耗等优点,可以实现对步进电机的精确控制和高性能驱动。
因此,基于FPGA控制的步进电机细分驱动器的设计与实现具有重要的理论和应用价值。
三、设计与实现1. 系统架构设计基于FPGA控制的步进电机细分驱动器系统主要由FPGA芯片、电源模块、步进电机和传感器等组成。
其中,FPGA芯片作为核心控制单元,负责接收上位机的控制指令,对步进电机进行精确控制。
电源模块为系统提供稳定的电源支持。
步进电机为系统的执行机构,根据FPGA的控制指令进行运动。
传感器用于检测步进电机的运行状态和位置信息,并将这些信息反馈给FPGA 芯片。
2. 硬件设计硬件设计主要包括FPGA芯片的选择和电路设计。
在选择FPGA芯片时,需要考虑其性能、功耗、价格等因素。
电路设计包括电源电路、控制电路、信号传输电路等。
其中,控制电路是核心部分,需要设计合理的逻辑控制电路来实现对步进电机的精确控制。
此外,还需要考虑信号传输的稳定性和抗干扰能力等因素。
3. 软件设计软件设计主要包括FPGA程序的编写和调试。
首先,需要根据步进电机的特性和控制要求,编写合适的算法和控制程序。
《基于FPGA控制的步进电机细分驱动器的设计与现实》范文

《基于FPGA控制的步进电机细分驱动器的设计与现实》篇一一、引言随着科技的飞速发展,步进电机已经成为现代工业自动化领域中不可或缺的驱动装置。
步进电机细分驱动器作为步进电机控制的核心部分,其性能的优劣直接影响到步进电机的运行精度和效率。
传统的步进电机驱动器通常采用微控制器或DSP进行控制,但这些方案在处理高速、高精度的运动控制时存在一定局限性。
因此,本文提出了一种基于FPGA(现场可编程门阵列)控制的步进电机细分驱动器设计方案,并对其设计与实现进行详细阐述。
二、系统设计1. 硬件设计本系统主要由FPGA控制器、步进电机驱动模块、电源模块、信号采集与反馈模块等组成。
其中,FPGA控制器是整个系统的核心,负责接收上位机发送的控制指令,并通过算法计算出适当的细分控制信号,驱动步进电机进行精确运动。
步进电机驱动模块采用高电压、大电流的H桥电路,以实现对步进电机的有效驱动。
2. 软件设计软件设计主要包括FPGA程序设计、信号采集与处理算法设计等。
FPGA程序设计采用硬件描述语言(HDL)进行编写,实现步进电机的精确控制。
信号采集与处理算法则用于实时监测步进电机的运行状态,并将数据反馈给FPGA控制器,以便进行实时调整。
三、FPGA控制算法设计1. 细分控制算法步进电机的细分控制是提高其运行精度的重要手段。
本系统采用基于FPGA的细分控制算法,通过精确控制步进电机的相序和通电时间,实现步进电机的细分数可调。
同时,通过优化算法,降低电机的振动和噪音,提高电机的运行平稳性。
2. 运动控制算法运动控制算法是实现步进电机精确运动的关键。
本系统采用基于PID(比例-积分-微分)算法的运动控制策略,通过实时调整PID参数,实现对步进电机的精确位置和速度控制。
同时,通过引入前馈控制策略,进一步提高系统的响应速度和抗干扰能力。
四、系统实现与测试1. 硬件实现根据系统设计,完成FPGA控制器、步进电机驱动模块、电源模块、信号采集与反馈模块等硬件电路的搭建与调试。
基于FPGA的步进电机正弦波细分驱动器设计

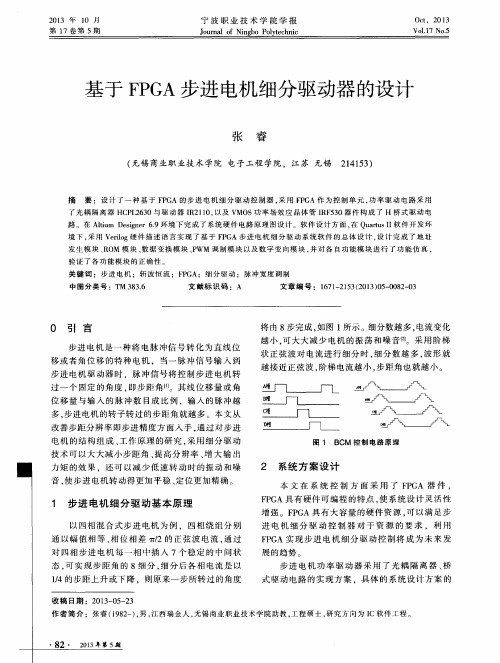
基于FPGA的步进电机正弦波细分驱动器设计(哈尔滨工业大学电气工程及自动化学院,哈尔滨 150001)作者:李宁指导教师:杨春玲The Design of Stepper Motor Sine-Wave Subdivision Controller Base on FPGA(Harbin Institute of Technology, Harbin 150001)ABSTRACT: This design, used FPGA (field programmable gate arrays) of Altera’s Cyclone II series, has realized a sine-wave subdivision-variation control system for stepper motor, which is verified and implemented on one chip FPGA. This scheme integrates the current-feedback SPWM principle, the PI regulating technique, the System On a Programmable Chip (SOPC) technology as well as EDA design technology. The control system for stepper motor successfully integrates Nios II processor and logic module on one chip. The problem of high-subdivision stepping angle is solved effectively. The number of subdivision can reach 4096, and can be automatically adjusted. Experimental results indicate that the control system can improve the control precision of stepper motor and make it runs more smoothly.KEY WORDS: stepping motor controller;subdivision;FPGA摘要:本设计应用Altera 公司的Cyclone II系列的FPGA(现场可编程门阵列)实现了对步进电机正弦波可变细分控制,并在FPGA中进行了具体验证和实现。
基于FPGA的步进电机细分控制电路的设计
目录1 引言 (1)2 步进电机简介 (2)2.1 步进电机工作原理 (2)2.2 步进电机的励磁方式 (2)2.2.1 一相励磁 (2)2.2.2 二相励磁 (3)2.2.3 一-二相励磁 (3)2.3 细分驱动原理 (4)3 设计方案 (5)3.1 各个模块简要介绍 (6)3.2 各个部分仿真图介绍 (8)4 结论 (11)谢辞 (12)参考文献 (13)附录 (14)1 引言步进电机是将电脉冲信号转变成角度位移或者线性位移的开环控制元件。
在非超载的情况下电机的转速、停止位置只是取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只是周期性的误差而无累计误差的特点,使得步进电机在速度、位置等控制领域操作非常简单。
基于步进电机具有转矩大、惯性小、响应频率高、可开环应用等优点,它被广泛应用在工业自动控制、仪器仪表等领域。
然而步进电机在低频运行时存在振荡现象并且产生很大的电磁噪声, 另外步进电机的固有步进角多在0. 45~1. 8之间, 在精密、稳定控制场合, 用普通的方法驱动步进电机不能获得理想的步进控制精度和运行平稳度。
因此需要通过步进电机细分技术来改善。
步进电机的细分技术实质上是一种电子阻尼技术,细分驱动技术能够大大提高步进电机的步距分辨率, 减小转矩的波动, 避免低频振荡, 降低运行时的噪声,提高电机的运转精度只是细分技术的一个附带功能。
比如对于步进角为1.8°的两相混合式步进电机,如果细分驱动器的细分数设置为4,那么电机的运转分辨率为每个脉冲0.45°,电机的精度能否达到或接近0.45°,还取决于细分驱动器的细分电流控制精度等其它因素。
不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。
现场可编程门阵列( Field Programmable Gate Array, FPGA)集成度高、通用性好、设计灵活且性能稳定, 能够极大地缩小电路板的面积, 提高电路的稳定性。
基于FPGA的步进电机SPWM细分驱动系统的设计
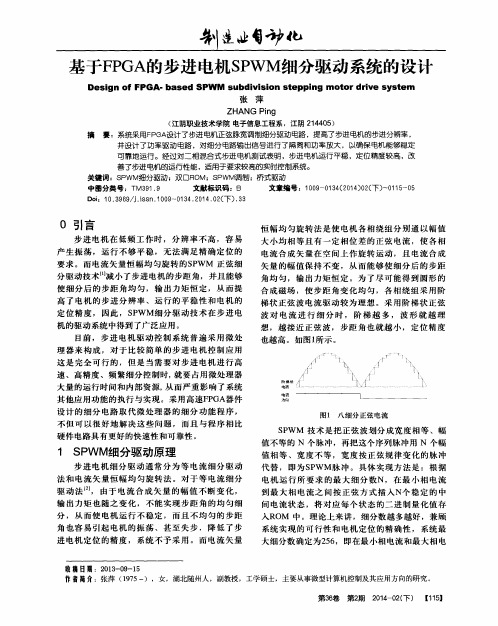
1 S P W M细 分 驱 动 原 理
步 进 电机 细 分 驱动 通 常 分 为 等 电 流 细 分 驱 动 法 和 电流 矢 量 恒 幅 均 匀 旋 转 法 。对 于 等 电流 细 分
代 替 ,即 为 S P WM 脉 冲 。具 体 实现 方法 是 :根 据
电 机 运 行 所 要 求 的 最 大 细 分 数 N,在 最 小 相 电流 到 最 大 相 电流 之 间 按 正 弦 方 式 插 入 N个 稳 定 的 中 间 电 流 状 态 ,将 对 应 每个 状 态 的二 进 制 量 化 值 存 入R OM 中 。理 论 上 来讲 ,细分数 越 多越好 ,兼顾 系 统 实现 的可 行 性 和 电机 定位 的精 确 性 , 系统 最
第3 6 卷
第2 期 2 0 1 4 — 0 2 ( 下) 【 1 1 5 1
l
流之 间 划分 为 2 5 6 个 正 弦 电流 值 ,一 个正 弦 周 期共
定 位 精 度 ,因 此 ,S P W M细 分 驱 动 技 术 在 步 进 电
机 的驱动 系统 中得到 了广 泛 应用 。 目前 ,步 进 电机 驱 动 制 系 统 普 遍 采 用 微 处
波 对 电 流 进 行 细 分 时 ,阶 梯 越 多 , 波 形 就 越 理
想 ,越 接近 正 弦 波 , 步距 角也 就 越 小 ,定 位 精 度
( 江阴职 业技术学院 电子信 息工程系 ,江阴 2 1 4 4 0 5 ) 摘 要 :系统采用F P G A设计 了步进 电机正弦脉宽调制细分驱 动电路 ,提高 了步进 电机 的步进分辨率 ,
并设计 了功率驱 动 电路 ,对细分 电路输 出信 号进行 了隔离和 功率放大 ,以确保 电机 能够 稳定 可靠地 运行。经过 对二 相混合式 步进 电机测 试表 明 ,步进 电机 运行平 稳 ,定位 精度较 高 ,改 善 了步进 电机的运行性 能,适 用于 要求较高的实时控制系统。 关键词 :S P WM 细分驱 动 ; 双 口R O M;S P WM 调制 ;桥式驱动 中囝分类号 :T M3 9 1 . 9 文献标识码 :B 文章编号 :1 0 0 9 —0 1 3 4 ( 2 0 1 4 ) 0 2 ( 下) 一 0 1 1 5 —0 5
基于FPGA的步进电机细分驱动控制器的设计

1 绪论1.1课题研究背景及意义历史证明,一个国家的制造业水平在很大程度上可以体现国家的实力,国家的发展也在很大程度上依赖于先进的制造业,所以大多数国家都非常重视大力展制造业,二战后,计算机控制技术、微电子技术、信息和自动化技术有了迅速的发展,并在制造业中得到了愈来愈广泛的应用,先后出现了数控(NC)、计算机数控(CNC)、柔性制造单元(FMC)、柔性制造系统(FMS)、计算机辅助设计与制造(CAD/CAM)、计算机集成制造系统(CIMS)等多项先进制造技术与制造模式,推着世界制造业进入一个崭新的阶段川。
而在这些技术环节中,具有很多优点的步进电机就是一个重要角色,比如在数控技术中。
步进电动机又称脉冲电动机或阶跃电动机,国外一般称为Steppingmotor、Pu1Semotor或stepperServO,其应用发展己有约80年的历史。
可以说步进动机天生就是一种离散运动的装置,是纯粹的数字控制电动机,步进电机驱动器通过外加控制脉冲,控制步进电动机各相绕组的导通或截止,从而使电动机产生步进运动。
就是说给一个电脉冲信号,电动机就转过一个角度或者前进一步,其输出转角、转速与输入脉冲的个数、频率有着严格的比例关系。
这些关系在负载能力范围内不随电源电压、负载大小、环境条件等的变化而变化。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,同时步进电机只有周期性的误差而无累积误差,精度高。
步进电动机可以在宽广的频率范围内通过改变脉冲频率来实现调速、快速起停、正反转控制等,这是步进电动机最突出的优点。
正是由于步进电机具有突出的优点,所以成了机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
比如在数控系统中就得到广泛的应用。
目前世界各国都在大力发展数控技术,我国的数控系统也取得了很大的发展,我国己经能够自行研制开发适合我国数控机床发展需要的各种档次的数控系统。
《基于FPGA控制的步进电机细分驱动器的设计与现实》范文
《基于FPGA控制的步进电机细分驱动器的设计与现实》篇一一、引言步进电机因其精确的步进运动和易于控制的特点,在工业自动化、机器人技术、精密仪器等领域得到了广泛应用。
然而,传统的步进电机驱动器在细分控制上存在一定局限性,如控制精度不高、响应速度慢等。
为了解决这些问题,本文提出了一种基于FPGA(现场可编程门阵列)控制的步进电机细分驱动器设计方案,并对其进行了实际实现。
二、步进电机及驱动器概述步进电机是一种将电脉冲信号转换成线性或旋转运动的设备。
其工作原理是通过改变电机的电流方向和大小来控制电机的转动。
步进电机驱动器则是用来控制步进电机的设备,它可以将控制信号转换为电机所需的电流和电压。
传统的步进电机驱动器通常采用微控制器或数字信号处理器(DSP)进行控制,但这些控制器在处理复杂算法和控制策略时存在一定局限性。
三、基于FPGA的步进电机细分驱动器设计(一)设计思路基于FPGA的步进电机细分驱动器设计思路主要包括以下几个步骤:首先,根据步进电机的特性和应用需求,确定驱动器的性能指标;其次,设计FPGA的硬件电路和软件算法,实现步进电机的细分驱动控制;最后,对设计进行仿真和实际测试,验证其性能和可靠性。
(二)硬件设计硬件设计主要包括FPGA芯片的选择、电源电路、信号处理电路等。
在选择FPGA芯片时,需要考虑其性能、功耗、价格等因素。
电源电路需要提供稳定的电源电压,以保证FPGA和步进电机的正常工作。
信号处理电路则需要将控制信号转换为适合步进电机驱动的电流和电压。
(三)软件算法设计软件算法设计是实现步进电机细分驱动控制的核心部分。
主要包括步进电机的控制策略、细分算法、抗干扰措施等。
控制策略需要保证电机的平稳运行和精确控制;细分算法则需要将电机的转动细分为多个步进,提高电机的控制精度;抗干扰措施则需要保证系统在复杂的环境下能够稳定工作。
四、实际实现与测试(一)实现过程根据设计思路和硬件、软件设计方案,进行实际制作和调试。
基于FPGA步进电机细分驱动器的设计
F P G A具有硬件 可编程 的特点 , 使 系统设 计灵 活性 增强 。F P G A具有 大容量 的硬件 资源 , 可以满 足步 进 电机 细 分 驱 动 控 制 器 对 于 资源 的要 求 ,利 用 F P G A实 现 步进 电机 细分 驱动 控制 将成 为 未来 发
验 证 了 各 功 能模 块 的正 确 性 。
关 键 词 :步 进 电 机 ;斩波 恒 流 ;F P G A;细 分 驱 动 ;脉 冲宽 度 调 制
中图 分 类 号 :T M 3 8 3 . 6
文 献 标 识 码 :A
文 章 编 号 :1 6 7 1 — 2 1 5 3 ( 2 0 1 3 ) 0 5 — 0 0 8 2 — 0 3
路。在 A h i u m D e s i g n e r 6 . 9环境 下 完 成 了 系 统 硬件 电路 原 理 图 设计 。软 件 设 计方 面 , 在Q u a r t u s I I 软件 开发 环
境下 , 采用 V e r i l o g 硬 件 描 述 语 言 实 现 了基 于 F P G A 步 进 电机 细 分 驱 动 系 统 软 件 的 总 体 设 计 , 设 计 完 成 了地 址 发生模块 、 R O M模块 、 数据变换模块 、 P W M 调 制 模 块 以 及 数 字 变 向模 块 , 并 对 各 自功 能 模 块 进 行 了功 能 仿 真 ,
2 01 3年 1 0 月
宁 波 职 业 技 术 学 院 学 报
J o u r n a l o f Ni n g b o P o l y t e c h n i c
基于FPGA步进电机细分控制系统
基于FPGA步进电机细分控制系统王天放;贾楠;彭如意;吕建工;彭吉龙;付利平【摘要】现代卫星载荷的探测功能日益强大,电机等活动部件在卫星载荷上的应用也日渐广泛。
星上电机寿命和可靠性是制约卫星长期在轨正常工作的主要因素之一,因此星上电机系统设计在满足使用要求的同时,还需充分考虑到寿命和可靠性要求。
本文设计了一种基于FPGA的二相混合式步进电机控制系统,采用细分控制方法,提高控制精度,抑制低频振动。
除此之外设计加速过程,保证电机可靠启动;采用大电流停止,保证电机迅速停止;静止时使用小电流保持。
通过系统测试证明,该系统具有功耗低、起停稳定等优点。
%The capability of the modern payloads on satellite is getting stronger and stronger, and the motor has been used widely. The life and reliability of the motor equipped on satellite would be the main characters that restrict long-time work of the satellites. So the design of motor system on satellites should be not only satisfied with the application requirements, but also the requirements of life and reliability should be fully taken into account simultaneously. In this paper, a two-phase hybrid stepper motor control system based on FPGA is introduced. In order to improve control accuracy and suppress low-frequency vibration, the system was designed based on subdivision control method and an acceleration process was designed to ensure that motor started properly. Large current was used to stop the motor quickly and small current was used to keep the motor motionless. The test results showed that this system has the advantages of low-power consumption, starting and stopping steadily.【期刊名称】《电子设计工程》【年(卷),期】2016(000)001【总页数】3页(P121-123)【关键词】步进电机;细分控制;FPGA;PWM【作者】王天放;贾楠;彭如意;吕建工;彭吉龙;付利平【作者单位】中国科学院空间科学与应用研究中心北京 100190; 中国科学院大学北京 100049;中国科学院空间科学与应用研究中心北京 100190;中国科学院空间科学与应用研究中心北京 100190; 中国科学院大学北京 100049;中国科学院空间科学与应用研究中心北京 100190;中国科学院空间科学与应用研究中心北京100190;中国科学院空间科学与应用研究中心北京 100190【正文语种】中文【中图分类】TM384;TN709;TN492随着现代卫星载荷探测功能日益增强,对电机等活动部件的寿命与可靠性提出更高要求。
基于FPGA步进电机细分驱动控制
毕业设计 [论文]题目:基于FPGA步进电机细分驱动控制系别:xxx专业:xxx姓名:xx学号:xxxx指导教师:xxx目录摘要.................................................... 错误!未定义书签。
ABSTRACT................................................ 错误!未定义书签。
第1章绪论............................................ 错误!未定义书签。
1.1引言 .............................................. 错误!未定义书签。
1.2步进电机的特点及应用............................... 错误!未定义书签。
1.3课题研究的目的和意义............................... 错误!未定义书签。
第二章步进电机的结构和细分驱动原理..................... 错误!未定义书签。
2.1步进电机的结构..................................... 错误!未定义书签。
2.2步进电机的分类..................................... 错误!未定义书签。
..................................................... 错误!未定义书签。
..................................................... 错误!未定义书签。
..................................................... 错误!未定义书签。
2.3步进电机驱动技术概述............................... 错误!未定义书签。
《基于FPGA控制的步进电机细分驱动器的设计与现实》范文

《基于FPGA控制的步进电机细分驱动器的设计与现实》篇一一、引言随着科技的不断发展,步进电机已经成为自动化领域中的核心执行器。
其运行性能与效率在很大程度上依赖于驱动器的设计与控制。
为此,本文旨在设计并实现一种基于FPGA(现场可编程门阵列)控制的步进电机细分驱动器,以提高步进电机的运行效率和精确度。
二、步进电机及其驱动器概述步进电机是一种将电脉冲信号转换为线性或旋转运动的装置。
它广泛应用于自动化、机械控制等领域。
然而,步进电机的性能在很大程度上受到驱动器的影响。
传统的步进电机驱动器往往存在精度不高、噪音大等问题。
因此,对步进电机驱动器的设计与优化显得尤为重要。
三、FPGA控制的优势FPGA作为一种可编程的逻辑器件,具有高速度、高集成度、低功耗等优点。
将其应用于步进电机驱动器的控制中,可以实现对电机的精确控制,提高电机的运行效率和稳定性。
此外,FPGA的并行处理能力可以满足步进电机驱动器对实时性的要求。
四、基于FPGA控制的步进电机细分驱动器的设计1. 硬件设计硬件设计主要包括FPGA控制器、步进电机、电源电路、信号处理电路等部分。
其中,FPGA控制器负责接收和处理上位机发出的控制信号,并输出到步进电机驱动器,以实现对电机的精确控制。
电源电路为整个系统提供稳定的电源,信号处理电路用于对输入信号进行滤波、放大等处理。
2. 软件设计软件设计主要包括FPGA的编程和控制算法的设计。
FPGA 的编程包括对输入输出接口的配置、对步进电机驱动器的控制等。
控制算法的设计包括电机的细分控制算法、速度控制算法等。
通过编程和控制算法的设计,可以实现对步进电机的精确控制和高效运行。
五、驱动器的实现与测试在完成硬件和软件设计后,我们进行了驱动器的实现与测试。
首先,我们搭建了测试平台,将驱动器与步进电机连接起来,然后通过上位机发送控制信号,观察电机的运行情况。
测试结果表明,我们的驱动器能够实现对步进电机的精确控制,电机的运行效率和稳定性得到了显著提高。
基于FPGA步进电机细分驱动器的设计

基于FPGA步进电机细分驱动器的设计张睿【期刊名称】《宁波职业技术学院学报》【年(卷),期】2013(000)005【摘要】This paper designed a kind of stepping motor subdivided driving controller based on FPGA,The scheme uses FPGA as the controller,power drive circuit uses optically coupled isolator HCPL2630 and drives IR2110 and VMOS power field effect transistor IRF530 device made by H bridge driving circuit. The system hardware circuit diagram design is completed in Altium Designer 6.9 environment.In software design,the QuartusII software development environment,using Verilog hardware description language to achieve the overall design of the system software subdivision driving of stepping motor based on FPGA,completed the design of address generation module,ROM module,data conversion module,the PWM modulation module and digital variable to the module,and the functional modules of the the function simulation,verified the correctness of each function module.%设计了一种基于FPGA的步进电机细分驱动控制器,采用FPGA作为控制单元,功率驱动电路采用了光耦隔离器HCPL2630与驱动器IR2110,以及VMOS功率场效应晶体管IRF530器件构成了H桥式驱动电路。
基于FPGA的反应式步进电动机细分控制器设计

基于FPGA的反应式步进电动机细分控制器设计
于海东
【期刊名称】《微特电机》
【年(卷),期】2009(037)002
【摘要】针对反应式步进电动机的正弦转矩特性,介绍了等步距角细分电流的计算方法.相对于以前的计算方法,该方法精度更高.用VHDL语言设计了基于FPGA的多级细分控制器.该控制器不仅可将稳定平衡点之间的通常步距进行多级细分,还可提供不同的步进速度.该控制器的应用可大大简化细分驱动电路的结构,提高微处理器的工作效率.仿真结果验证了设计的正确性,所设计的基于FPGA的细分控制器稍作修改即可满足于对于不同类型的步进电动机.
【总页数】5页(P28-31,46)
【作者】于海东
【作者单位】扬州大学,江苏扬州,225009
【正文语种】中文
【中图分类】TM383.6
【相关文献】
1.基于FPGA的仪用两相步进电动机细分驱动器的设计 [J], 李文娜;陆锷;赵海洋;崔翠红
2.基于FPGA的步进电动机伺服控制器通信系统设计 [J], 吴喜桥;刘景林
3.基于FPGA的反应式步进电动机控制系统设计 [J], 张齐;华亮;吴晓
4.基于SOPC技术的步进电动机细分控制器设计 [J], 李昱;刘景林;董亮辉
5.基于FPGA的四相步进电动机控制器的设计 [J], 黄志文;扈晓兰;邵平
因版权原因,仅展示原文概要,查看原文内容请购买。
《基于FPGA控制的步进电机细分驱动器的设计与现实》范文

《基于FPGA控制的步进电机细分驱动器的设计与现实》篇一一、引言步进电机因其精确的步进运动和良好的控制性能,在工业自动化、精密设备制造等领域有着广泛的应用。
为了进一步提升步进电机的运动性能,基于FPGA(现场可编程门阵列)控制的步进电机细分驱动器成为研究热点。
本文旨在设计并实现一个基于FPGA控制的步进电机细分驱动器,提高其运动控制精度和稳定性。
二、设计思路(一)硬件设计硬件设计主要包含FPGA控制器、步进电机驱动模块以及电源模块等部分。
其中,FPGA控制器是整个系统的核心,负责接收上位机的控制指令,并对步进电机的运动状态进行实时监控和调整。
步进电机驱动模块负责将FPGA控制器的输出信号转换为步进电机的驱动信号,以实现对步进电机的精确控制。
电源模块为整个系统提供稳定的电源供应。
(二)软件设计软件设计主要包括FPGA的编程和控制算法的设计。
FPGA 的编程采用硬件描述语言(HDL)进行,实现上位机与FPGA控制器之间的通信,以及FPGA控制器对步进电机驱动模块的控制。
控制算法的设计则根据步进电机的运动特性和应用需求进行,包括细分驱动算法、速度控制算法等。
三、细分驱动器的设计(一)细分驱动原理步进电机细分驱动是指将步进电机的每个步进角度细分为多个子步进角度,以提高电机的运动精度和稳定性。
通过改变每个子步进角度的占空比和顺序,可以实现对步进电机的精确控制。
(二)设计实现基于FPGA的步进电机细分驱动器设计,需要编写相应的FPGA程序,实现细分驱动算法。
具体而言,需要设计一个能够根据上位机的指令,实时计算并输出每个子步进角度的占空比和顺序的FPGA程序。
同时,还需要考虑电机的相序、电流等因素对电机性能的影响,以实现电机的最优控制。
四、实验与结果分析(一)实验环境与设备为了验证基于FPGA控制的步进电机细分驱动器的性能,我们搭建了实验平台。
实验设备包括步进电机、驱动器、FPGA控制器、上位机等。
其中,步进电机采用高精度的永磁式步进电机,以保证实验结果的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南京工程学院
自动化学院
大作业(论文)
题目:基于FPGA的步进电机细分驱动
控制设计
专业:测控技术与仪器
班级:学号:
学生姓名:
任课教师:郭婧
成绩:
基于FPGA的步进电机细分驱动控制设计
一、基本要求:
在理解步进电机的工作原理以及细分原理的基础上,利用FPGA实现四相步进电机的8细分驱动控制。
二、评分标准:
1、设计方案介绍(共15分)
要求:详细叙述利用FPGA实现对四相步进电机进行8细分控制的设计方案。
评分标准:
13-15分:方案叙述详细,正确;
10-12分:方案叙述较详细,基本正确;
9分以下:酌情给分
0分:抄袭别人
2、VHDL设计部分(60分)
要求:给出详细的VHDL设计过程,提供详细的程序代码,如果设计中用到LPM模块,则给出生成LPM模块的每一步操作流程的截图,并加以文字描述。
评分标准:
54-60分:代码详细,截图完整,书写规范,
48-53分:代码较详细,截图较完整,书写较规范;
47以下:酌情给分
0分:抄袭别人
3、模拟调试部分(20分)
要求:给出详细的仿真过程,对软件编译、仿真分析、仿真波形进行截图。
并给出8细分情况下的仿真测试结果,给出详细的实验结果分析。
评分标准:
18-20分:调试过程详细,正确,截图完整;
15-17分:调试过程较详细,基本正确,有截图;
14分以下:酌情给分
0分:抄袭别人
4、提高部分(5分)
要求:利用FPGA实验箱上的步进电机,实现细分控制。
评分标准:根据完成的程度给分。
0分:抄袭别人
参考:实验十八 FPGA步进电机细分驱动控制设计
示例程序和实验指导课件位置:\EDA_BOOK3_FOR_C35\chpt3\EXP18_MOTO\工程:step_a
一、实验目的
学习用FPGA实现步进电机的驱动和细分控制。
二、实验设备
PC机一台
GW48-PK4试验系统一台
连接线若干
三、实验内容
1、建立工程。
完成以图18-1为原理图的工程设计,并保存工程名为step_a。
2、编译仿真。
对以上工程进行编译,成功后进行方针测试。
3、引脚锁定。
引脚锁定参考图18-2.
图18-1 步进电机PWM细分控制控制电路图
图18-2 引脚锁定图
4、下载测试
参考\EDA_BOOK3_FOR_C35\Chpt3\ALl.PPT\实验17.PPT
选择模式5,短路冒接clock0.根据第一章注释分别“38“和”42“或”“7”连接(见GW48主
系统标注)相接。
CLK0接clock0,选择4Hz;CLK5接clock5,选择32768Hz;S接AA18(键7),控制步进电机细分旋转(1/8细分,2.25度/步),或不细分旋转(18度/步);U_D 接L19(键8),控制旋转方向。
5、用嵌入式逻辑分析仪观察细分控制/普通控制方式驱动信号的实时波形(图18-3、18-4)。
图18-3嵌入式逻辑分析仪测试波形:4相步进电机普通工作方式驱动波形
图18-4嵌入式逻辑分析仪测试波形:4相步进电机细分驱动工作方式驱动波形
五、实验报告
根据以上的实验内容写出实验报告,包括程序设计、软件编译、仿真分析、硬件测试和详细实验过程;给出程序分析报告、仿真波形图及其分析报告。