光敏电阻小车循迹
光敏小车实验实习报告

光敏小车实验实习报告一、实验目的1. 了解并掌握光敏电阻的基本原理及其在自动循迹小车中的应用;2. 学习使用LM393P芯片进行双路电压比较,实现小车的自动循迹功能;3. 培养动手实践能力,提高对电子电路设计和组装的能力。
二、实验原理1. 光敏电阻原理:光敏电阻是一种利用半导体的光电效应制成的电阻器,其电阻值随入射光的强弱而改变。
当光照强度增加时,光敏电阻的电阻值减小;反之,光照强度减小时,电阻值增大。
2. LM393P芯片:LM393P是一个双路电压比较器集成电路,由两个比较精密独立的电压比较器构成。
它的作用是比较两端输入电压的高低,从而改变输出电压的大小。
3. 自动循迹小车原理:通过光敏电阻识别轨道上的黑线,将光敏电阻的阻值变化转化为电机的转速变化,实现小车的自动循迹功能。
三、实验器材与步骤1. 器材:光敏电阻、LM393P芯片、电机、轨道、电源、示波器等。
2. 步骤:(1) 搭建光敏电阻电路:将光敏电阻与LM393P芯片连接,形成一个闭环控制系统。
(2) 搭建电机驱动电路:将LM393P芯片的输出端与电机的控制端连接,实现电机转速的控制。
(3) 搭建轨道:在白纸上画出黑线,模拟实际轨道。
(4) 组装小车:将电机、轨道、光敏电阻电路等组装到小车上。
(5) 调试电路:调整光敏电阻电路中的电位器,使小车能够顺利循迹。
(6) 测试小车:观察小车在轨道上的运行情况,如有偏离,调整光敏电阻电路或电机驱动电路。
四、实验结果与分析1. 实验结果:通过调试,光敏小车在轨道上能够实现自动循迹,当遇到偏离轨道的情况时,能够迅速调整并回到正确轨道上。
2. 分析:(1) 光敏电阻在光照强度变化时,其电阻值发生变化,从而实现对电机转速的控制;(2) LM393P芯片作为双路电压比较器,能够精确地比较光敏电阻两端的电压值,从而实现对电机转速的精确控制;(3) 小车的自动循迹功能表明,光敏电阻和LM393P芯片在自动控制系统中具有较高的可靠性和稳定性。
智能循迹小车实验报告

智能循迹小车实验报告第一篇:智能循迹小车实验报告摘要本设计主要有单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。
本次设计采用STC公司的89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够轻松识别黑白两色路面,同时具有抗环境干扰能力,电机模块由L298N芯片和两个直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
关键词智能小车单片机红外光对管 STC89C52 L298N 1 绪论随着科学技术的发展,机器人的设计越来越精细,功能越来越复杂,智能小车作为其的一个分支,也在不断发展。
在近几年的电子设计大赛中,关于小车的智能化功能的实现也多种多样,因此本次我们也打算设计一智能小车,使其能自动识别预制道路,按照设计的道路自行寻迹。
设计任务与要求采用MCS-51单片机为控制芯片(也可采用其他的芯片),红外对管为识别器件、步进电机为行进部件,设计出一个能够识别以白底为道路色,宽度10mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹并能沿该轨迹行进的智能寻迹机器小车。
方案设计与方案选择3.1 硬件部分可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。
3.1.1 单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。
由于以前自己开发板使用的是ATMEL公司的STC89C52,所以让然选择这个芯片作为控制核心部件。
STC89C52是一种低损耗、高性能、CMOS八位微处理器,片内有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。
其程序和数据存储是分开的。
3.1.2 传感器模块方案一:使用光敏电阻组成光敏探测器采集路面信息。
阻值经过比较器输出高低电平进行分析,但是光照影响很大,不能稳定工作。
方案二:使用光电传感器来采集路面信息。
循迹小车资料
摘要机器人的出现及发展,己经使传统生产的面貌发生了根本性的变化,使人类的生产方式从手工作业、机械化、自动化跨入了智能化的新时代。
而机器人技术一直又是人们关注的科学研究领域之一。
机器人研究集力学、机械工程学、电子学、计算机科学和自动控制为一体,是一门综合性学科。
本系统以设计题目的要求为目的,采用80C51单片机为控制核心,利用光电传感器传感器检测道路上的障碍,控制电动小车自动避障,快慢速行驶,以及自动停车,并可以自动寻迹,自动记录时间。
整个系统的电路结构简单,可靠性能高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
采用的技术主要有:(1)通过编程来控制小车的速度;(2)传感器的有效应用;关键词80C51单片机、光电检测器、PWM调速、电动小车一、设计任务:(1)自动寻迹小车从安全区域启动。
(2)小车按指定路线运行,自动区分直线轨道和弯路轨道,在指定弯路处避障,实现灵活前进、转弯等功能,在轨道上划出设定的地图。
(3) 小车按循迹路线运行,实现绕8字线循迹,整个过程显示运行时间,并可自动停车。
二、方案论证:1.寻迹检测方案的选择探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可以根据接收到的反射光强弱来判断是否是黑线。
利用这个原理,可以控制小车行走的路迹。
下面几种可行的方案是根据本原理设计的:方案一:采用普通的发光二极管及光敏电阻组成的发射接收方案,如图1-1所示。
其工作原理:当无光照时,光敏电阻呈现高阻状态,又分压公式可知,电阻R2无压降三极管截止,三极管的集电极输出高电平;反之,当有光照的时候,光敏电阻接收到反射的光,其阻值下降,由分压公式,R2有压降三极管导通,输出低电平,利用高低电平可以判断控制小车的形程和方向。
本方案能达到基本的控制要求,但是它的缺点在于容易受到外界光线的干扰,不易于控制小车的行迹,损坏了信号采集的效果。
主要是因为可见光的反射效果跟地表的平坦程度、材料的反射情况有关直接影响到检测效果。
循迹小车(纯硬件版)

采用数字电路的循迹小车本着从简到繁的原则,我们首先来制作一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。
下面我们先来熟悉一下三个主要器件:光敏电阻器件这就是光敏电阻,它能够检测外界光线的强弱,外界光线越强光敏电阻的阻值越小,外界光线越弱阻值越大,当红色LED光投射到白色区域和黑色跑道时因为反光率的不同,光敏电阻的阻值会发生明显区别,便于后续电路进行控制。
LM393比较器集成电路LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成。
它的作用是比较两个输入电压,根据两路输入电压的高低改变输出电压的高低。
输出有两种状态:接近开路或者下拉接近低电平,LM393采用集电极开路输出,所以必须加上拉电阻才能输出高电平。
带减速齿轮的直流电机直流电机驱动小车的话必须要减速,否则转速过高的话小车跑得太快根本也来不及控制,而且未经减速的话转矩太小甚至跑不起来,我们专门定做的这种电机已经集成了减速齿轮大大降低了制作难度非常适合我们使用。
首先我们来熟悉一下整机的工作原理图,LM393随时比较着两路光敏电阻的大小,当出现不平衡时(例如一侧压黑色跑道)立即控制一侧电机停转,另一侧电机加速旋转,从而使小车修正方向,恢复到正确的方向上,整个过程是一个闭环控制,因此能快速灵敏地控制。
组装步骤:第一步:电路部分基本焊接电路焊接部分比较简单,焊接顺序按照元件高度从低到高的原则,首先焊接8个电阻,焊接时务必用万用表确认阻值是否正确,焊接有极性的元件如三极管、绿色指示灯、电解电容务必分清楚极性尽量参考我们图片的元件方向焊接,焊接电容时引脚短的是负极插入PCB丝印上阴影的一侧,焊接绿色LED时注意引脚长的是正极,并且焊接时间不能太长否则容易焊坏,D4 D5 R13 R14 可以暂时不焊,集成电路芯片可以不插,初步焊接完成后请务必细心核对,防止粗心大意。
光敏电阻 车规
光敏电阻车规1.引言1.1 概述光敏电阻是一种使用光敏材料制造的电子元件,它的电阻值会随着光照的强弱而变化。
光敏电阻广泛应用于光电自动控制、照相测光以及具有亮度控制功能的电子产品中。
随着科技的进步和人们对智能化生活的追求,光敏电阻在车辆行业中也得到了广泛应用。
光敏电阻可以通过检测周围环境光照的强度,实现车辆灯光的自动控制。
例如,当车辆进入暗处或者夜晚行驶时,光敏电阻能够感知到光线的变化,自动启动车头灯和尾灯,提高车辆在低光照环境下的可视性和安全性。
光敏电阻还可以用于车内照明系统的智能控制。
通过感知车内的光照情况,光敏电阻能够自动调节车内照明的亮度,提供舒适的用车体验。
当车辆停车时,光敏电阻能够感知到外部光线的变化,自动调节车内照明的亮度和颜色,创造出温馨舒适的车内环境。
此外,光敏电阻还可以用于车辆安全系统的控制。
例如,在自动驾驶技术中,光敏电阻可用于感知车辆周围环境的光照情况,以自动调节车辆传感器和相机的曝光度,提高自动驾驶系统的可靠性和稳定性。
总之,随着科技的不断发展,光敏电阻在车辆行业中的应用前景广阔。
它的应用不仅提高了车辆的安全性和舒适度,还为智能化驾驶技术的发展提供了有力支持。
未来,我们可以期待光敏电阻在车规领域的更多创新应用。
1.2 文章结构文章结构部分的内容可以从以下角度展开:本文将围绕光敏电阻展开讨论,主要包括引言、正文和结论三个部分。
引言部分将首先概述光敏电阻的基本概念和特点,对读者进行初步介绍。
其次,介绍本文的结构,即文章分为引言、正文和结论三个部分,以便读者清晰理解文章结构和内容。
最后,明确本文的目的,即探讨光敏电阻在车规领域中的应用。
正文部分将详细介绍光敏电阻的原理和应用。
在原理部分,将解释光敏电阻的工作原理,包括光敏电阻是如何根据光照强度变化来改变电阻值的,以及其内部结构和特性。
在应用部分,将探讨光敏电阻在车规领域中的具体应用场景,例如在车灯控制系统中的应用、在智能驾驶系统中的应用等等。
循迹小车原理

循迹小车原理循迹小车(LineTrackingCar)是一种由电机驱动的机器人的智能小车,用来完成自动驾驶任务。
它的基本原理是通过传感器检测光线反射强度,再通过算法来控制电机运转,从而实现无人自动导航。
因此,其主要技术要素为,传感器、光强度检测框架、运动控制算法和运动系统组件等。
循迹小车的传感器循迹小车使用的传感器主要有光敏电阻、红外传感器、超声波传感器、电眼传感器等,其中光敏电阻是最常用的一种传感器。
它能够感知反射光强度的变化,从而实现循迹小车的运动。
它的信号线由电路芯片组成,并且能够将电压转换为电信号,并由电路板传递到主控单元,最终由控制系统进行处理。
循迹小车的光强度检测框架光强度检测框架是循迹小车机器人运动控制中很重要的一个环节,它将传感器探测到的光强度变化转换为特定的数值,用于控制小车的行走方向和方式。
在做光强度检测框架时,可以根据小车设计的参数,确定路径中的若干个固定点,可以将这些点进行编号,再按照特定的顺序进行检测,如:采用从底部到顶部的方式,进行依次检测,可以有效地完成小车的路径规划。
循迹小车的运动控制算法运动控制算法是循迹小车中重要组成部分,它是控制小车机器人运动的核心算法,用于确定小车运动的方向和动作,从而实现跟随路径的行走。
常见的循迹小车控制算法有老鼠算法,动态规划算法,RANSAC算法,模糊控制算法,改进的蚁群算法等。
老鼠算法,是一种使用机器人的最简单的算法,基本思想是通过不断的前行,然后再根据所遇到的环境做出右转或左转的决策。
动态规划算法,是一种贪心算法,它计算每一步直接决策,以实现最优解。
RANSAC算法,是一种基于概率的算法,它基于模型快速迭代采样,以找出有效数据并通过迭代重新估计参数。
模糊控制算法,是一种数学分析技术,它将概率和关联度结合起来,以实现模糊决策。
改进的蚁群算法,是一种基于智能的算法,它基于人类的行为,以实现小车路径的优化。
循迹小车的运动系统组件运动系统组件是循迹小车机器人的控制系统的重要组成部分,它包括:电机控制器、电机驱动器、轮胎组件和电源组件等。
智能小车的路径识别问题
智能小车的路径识别问题摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。
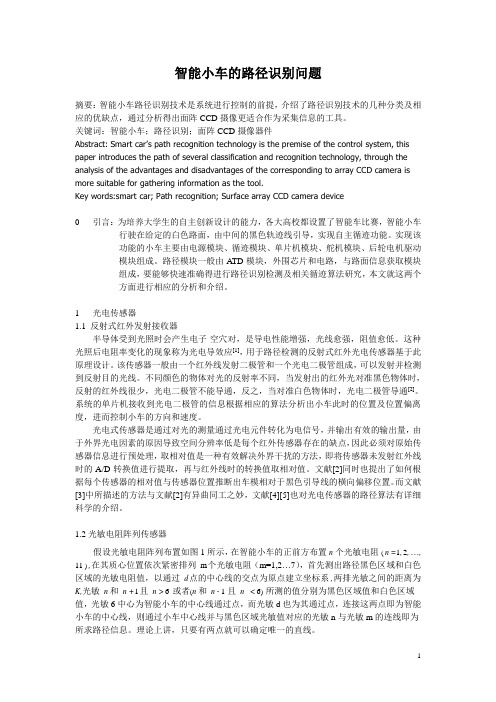
关键词:智能小车;路径识别;面阵CCD摄像器件Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool.Key words:smart car; Path recognition; Surface array CCD camera device0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。
实现该功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动模块组成。
路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个方面进行相应的分析和介绍。
1 光电传感器1.1 反射式红外发射接收器半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。
这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。
该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。
51循迹小车程序实验报告
竭诚为您提供优质文档/双击可除51循迹小车程序实验报告篇一:智能循迹小车实验报告摘要本设计主要有单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。
本次设计采用sTc公司的89c52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够轻松识别黑白两色路面,同时具有抗环境干扰能力,电机模块由L298n芯片和两个直流电机构成,组成了智能车的动力系统,电源采用7.2V的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
关键词智能小车单片机红外光对管sTc89c52L298n1绪论随着科学技术的发展,机器人的设计越来越精细,功能越来越复杂,智能小车作为其的一个分支,也在不断发展。
在近几年的电子设计大赛中,关于小车的智能化功能的实现也多种多样,因此本次我们也打算设计一智能小车,使其能自动识别预制道路,按照设计的道路自行寻迹。
2设计任务与要求采用mcs-51单片机为控制芯片(也可采用其他的芯片),红外对管为识别器件、步进电机为行进部件,设计出一个能够识别以白底为道路色,宽度10mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹并能沿该轨迹行进的智能寻迹机器小车。
3方案设计与方案选择3.1硬件部分可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。
3.1.1单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。
由于以前自己开发板使用的是ATmeL公司的sTc89c52,所以让然选择这个芯片作为控制核心部件。
sTc89c52是一种低损耗、高性能、cmos八位微处理器,片内有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。
其程序和数据存储是分开的。
3.1.2传感器模块方案一:使用光敏电阻组成光敏探测器采集路面信息。
阻值经过比较器输出高低电平进行分析,但是光照影响很大,不能稳定工作。
方案二:使用光电传感器来采集路面信息。
自动循迹小车方案论证

方案论证1.电源模块设计方案方案一:利用电池的串行连接来提供一个合适的电压。
由于单电源模式下需同时对单片机和两个电机供电,故电机波动可能会影响单片机,进而导致测量、控制不准确。
方案二:采用双电源供电,将电动机驱动电源与单片机以及其周边电路电源完全隔离。
用7805为电机提供稳定电压,另一方面用干电池对单片机及其他电路电源供电,这样做虽然不如单电源方便灵活,但可以使电动机驱动所造成的干扰彻底消除,提高了系统的稳定性。
2.电机驱动模块设计方案方案一:采用直流电机,配合LM298驱动芯片组合。
优点在于硬件电路的设计简单。
当外加额定直流电压时,转速几乎相等但由于不允许用LM298,所以不采用此方案。
方案二:采用直流电机配合由晶体管组成的H桥电路。
用单片机控制晶体管使之工作在占空比可调的开关状态,精确调整电机转速。
这种电路由于工作在管子的饱和截止模式下,效率非常高;H桥电路保证了可以简单地实现转速和方向的控制;电子开关的速度很快,稳定性也很高,是一种广泛采用的调速技术。
3.循迹模块设计方案方案一:采用普通的发光二极管及光敏电阻组成的循迹方案。
其工作原理是:当无光照时,光敏电阻呈现高阻状态,电阻R2无压降三极管截止,三极管的集电极输出高电平;反之,当有光照的时候,光敏电阻接收到反射的光,其阻值下降,R2有压降三极管导通,输出低电平,利用高低电平可以判断控制小车的形程和方向。
本方案能达到基本的控制要求,但是它的缺点在于容易受到外界光线的干扰(可见光的反射效果跟地表的平坦程度、材料的反射情况有关),不易于控制小车的行迹,损坏了信号采集的效果。
方案二:采用RPR220型光电对管实现循迹方案。
利用红外线在不同颜色物体表面上具有不同的反射特点。
小车行驶过程中是循着黑线行走,因此采取反射光点循迹原理。
小车在行驶中不断向地面发射红外光,当遇到白色是即为漫反射,发射光被白色反射。
当遇到黑色时,发射光背黑色充分吸收。
利用此特点,小车将能正确的找到准确的路线。
智能循迹小车实验报告
摘要本设计主要有单片机模块、传感器模块、电机驱动模块以及电源模块组成,小车具有自主寻迹的功能。
本次设计采用STC公司的89C52单片机作为控制芯片,传感器模块采用红外光电对管和比较器实现,能够轻松识别黑白两色路面,同时具有抗环境干扰能力,电机模块由L298N芯片和两个直流电机构成,组成了智能车的动力系统,电源采用的直流电池,经过系统组装,从而实现了小车的自动循迹的功能。
关键词智能小车 STC89C52单片机 L298N 红外光对管1绪论随着科学技术的发展,机器人的设计越来越精细,功能越来越复杂,智能小车作为其的一个分支,也在不断发展。
在近几年的电子设计大赛中,关于小车的智能化功能的实现也多种多样,因此本次我们也打算设计一智能小车,使其能自动识别预制道路,按照设计的道路自行寻迹。
2设计任务与要求采用MCS-51单片机为控制芯片(也可采用其他的芯片),红外对管为识别器件、步进电机为行进部件,设计出一个能够识别以白底为道路色,宽度10mm左右的黑色胶带制作的不规则的封闭曲线为引导轨迹并能沿该轨迹行进的智能寻迹机器小车。
3方案设计与方案选择3.1硬件部分可分为四个模块:单片机模块、传感器模块、电机驱动模块以及电源模块。
3.1.1单片机模块为小车运行的核心部件,起控制小车的所有运行状态的作用。
由于以前自己开发板使用的是ATMEL公司的STC89C52,所以让然选择这个芯片作为控制核心部件。
STC89C52是一种低损耗、高性能、CMOS八位微处理器,片内有4k字节的在线可重复编程、快速擦除快速写入程序的存储器,能重复写入/擦除1000次,数据保存时间为十年。
其程序和数据存储是分开的。
3.1.2传感器模块方案一:使用光敏电阻组成光敏探测器采集路面信息。
阻值经过比较器输出高低电平进行分析,但是光照影响很大,不能稳定工作。
方案二:使用光电传感器来采集路面信息。
使用红外光电对管,其结构简明,实现方便,成本低廉,没有复杂的图像处理工作,因此反应灵敏,响应时间少。
小车循迹原理
小车循迹原理2009-07-11 12:401.小车控制及驱动单元的选择此部分是整个小车的大脑,是整个小车运行的核心部件,起着控制小车所有运行状态的作用。
通常选用单片机作为小车的核心控制单元,本文以台湾凌阳公司的SPCE061A单片机为例予以介绍。
SPCE061是一款拥有2K RAM、32KFlash、32 个I/O 口,并集成了AD/DA功能强大的16位微处理器,它还拥有丰富的语音处理功能,为小车的功能扩展提供了相当大的空间。
只要按照该单片机的要求对其编制程序就可以实现很多不同的功能。
小车驱动电机一般利用现成的玩具小车上的配套直流电机。
考虑到小车必须能够前进、倒退、停止,并能灵活转向,在左右两轮各装一个电机分别进行驱动。
当左轮电机转速高于右轮电机转速时小车向右转,反之则向左转。
为了能控制车轮的转速,可以采取PWM调速法,即由单片机的IOB8、IOB9输出一系列频率固定的方波,再通过功率放大来驱动电机,在单片机中编程改变输出方波的占空比就可以改变加到电机上的平均电压,从而可以改变电机的转速。
左右轮两个电机转速的配合就可以实现小车的前进、倒退、转弯等功能。
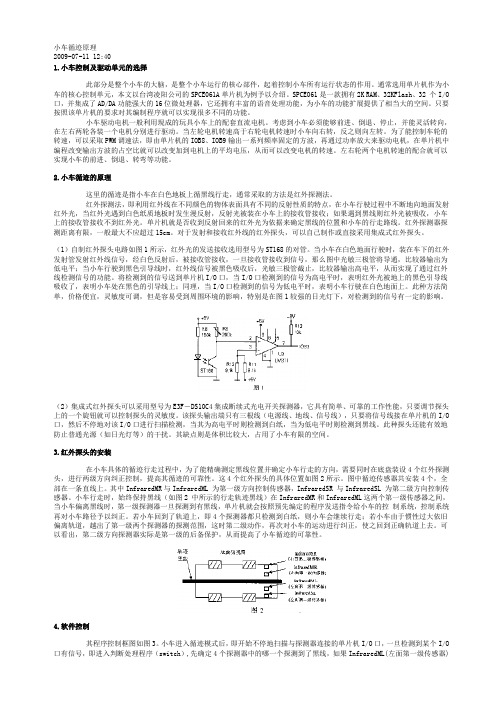
2.小车循迹的原理这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。
单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
红外探测器探测距离有限,一般最大不应超过15cm。
对于发射和接收红外线的红外探头,可以自己制作或直接采用集成式红外探头。
(1)自制红外探头电路如图1所示,红外光的发送接收选用型号为ST168的对管。
当小车在白色地面行驶时,装在车下的红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,那么图中光敏三极管将导通,比较器输出为低电平;当小车行驶到黑色引导线时,红外线信号被黑色吸收后,光敏三极管截止,比较器输出高电平,从而实现了通过红外线检测信号的功能。
智能循迹小车设计方案 智能循迹小车方案

智能循迹小车设计方案智能循迹小车方案自动化06--2班2009年6月5日自动寻迹小车摘要本寻迹小车是以PCB电路板为车架,AT89S51单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。
系统由AT89S51通过IO口控制小车的前进后退以及转向。
寻迹由RPR2…各省主要风电塔架制造厂名单序号123456789101112131415161718192021222324 公司名称甘肃玉门锦辉长城甘肃科耀电力有限公司北车集团兰州金牛轨道交通装备有限公司河北强盛风电设备有限公司保定天威电气设备结构有限公司…学习“七.一”讲话精神,深入剖析“四种危险” 胡锦涛在党庆90年大会上,总结了建党以来的“三件大事”和“两大成果”,提出了往后“两个宏伟目标”,指出中共面临“四种考验”和存在“四种危险”。
整篇讲话与时俱进,有新意,有不少新提法,是一篇回顾历史、总结经…自动化06--2班2009年6月5日自动寻迹小车摘要本寻迹小车是以PCB电路板为车架,AT89S51单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路构成。
系统由AT89S51通过IO口控制小车的前进后退以及转向。
寻迹由RPR220型光电对管完成。
关键词:AT89S51 直流电机光电传感器自动寻迹电动车AbstractThe smart car is aluminum alloy for the chassis, AT89S51 MCU as its core, including motor and servo, plus photoelectric sensors, as well as other flame sensor and power circuit. MCU controls the car turning back forward or running on the white line. RPR220 reflective photo sensor seeks the trace. Far infrared flame sensor tracks the flame. In addition, the SCM system with Sunplus for voice broadcast can remind current status. The system transmits information through DF module. The car’s status will be transmitted to the Remote Console. OCMJ4X8C LCDdisplay and 2 keys for start control.Keywords: AT89S51 Motor Servo Photo sensor Electrical fire engines一、系统设计1、设计要求(1)寻线跑(2)显示小车当前的速度(3)显示时间并记录行驶距离(4)自动避开障碍物(5)其他2、小车循迹的原理这里的循迹是指小车在地板白纸上循黑线行走,通常采取的方法是红外探测法。
循迹、避障、寻光小车实验报告

简易智能小车摘要:本系统基于自动控制原理,以MSP430为控制核心,用红外传感器、光敏三极管、霍尔传感器、接近开关之间相互配合,实现了小车的智能化,小车完成了自动寻迹、避障、寻光入库、计时、铁片检测、行程测量的功能。
本系统采用液晶LCD12864显示数据,良好的人机交流界面,显示小车行程的时间、铁片中心线离起始线的距离和铁片的个数。
整个系统控制灵活,反应灵敏。
关键词:MSP430 传感器 LCD12864目录一、方案论证与比较 (3)1、题目任务要求及相关指标的分析 (3)2、方案的比较与选择 (3)(1)控制单元的选择 (3)(2)直流电机驱动电路的选择 (3)(3)轨迹探测模块选择 (3)(4)金属片的探测 (3)(5)路程测量方案的选择 (4)(6)避障方案的选择 (4)(7)小车寻光方案的选择 (4)(8)电源的选择 (4)(9)刹车机构功能方案比较 (5)二、系统总体设计方案及实现方框图 (5)1、系统总体设计方案 (5)2、系统实现框图 (5)三、理论分析与计算 (5)1、铁片中心线距离的测量 (5)2、小车行程时间的测量 (5)四、主要功能电路设计 (6)1、小车循迹模块 (6)2、小车检测铁片模块 (6)3、小车测距模块 (6)4、小车避障模块 (6)5、小车寻光模块 (6)6、直流电机驱动模块 (7)五、系统软件的设计 (8)六、测试量数据与分析 (8)1、测量数据 (8)2、数据分析 (8)参考文献 (8)一、方案论证与比较1.题目任务要求及相关指标的分析题目要求小车按照规定的跑道行驶,同时检测在跑道下的铁片,在检测到最后一块铁片时小车会有连续的声光显示;后又可以准确的避开障碍,而且不与障碍物接触;最后,在光源的引导下,进入车库。
智能小车有显示功能,可以显示检测到铁片的数量,金属片距起点的距离,行驶的总时间。
整个行驶过程中的总时间不大于90秒,小车在行驶90秒后会自动停车。
2. 方案的比较与选择(1)控制单元的选择方案一:利用单片机与FPGA配合使用。
光敏电阻小车循迹
分享到...复制网址邮件QQ空间新浪微博腾讯微博微信人人网开心网网易微博搜狐微博QQ好友淘江湖飞信豆瓣一键分享查看更多(124)这是什么工具?JiaThis分享到各大网站KC智能循迹小车寻迹小车附电路图智能小车作者:佚名文章来源:本站原创点击数:176 更新时间:2013-04-12 KC智能循迹小车寻迹小车附电路图含制作方法:随着素质教育的越来越被重视,很多学校都把制作智能小车作为首选课题,智能小车生动有趣还牵涉到机械结构、电子基础、传感器原理、自动控制甚至单片机编程等诸多学科知识,学生通过动手实践能大大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循迹小车、救火机器人、足球机器人、避障机器人、遥控汽车等课题。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
本着从简到繁的原则,我们首先来制作一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。
智能小车循迹原理
智能小车循迹原理智能小车循迹技术是一种基于光电传感器的自动导航技术,通过对地面反射光的检测和分析,实现小车在指定轨迹上行驶的能力。
本文将从传感器原理、信号处理和控制系统三个方面详细介绍智能小车循迹的工作原理。
一、传感器原理智能小车循迹系统主要依靠光电传感器来感知环境,其中常用的光电传感器有红外线传感器和光敏电阻传感器。
红外线传感器是最常见的一种传感器,其工作原理是通过发射和接收红外线来检测地面上的黑线或白线。
当传感器上方是黑线时,地面会吸收红外线,传感器接收到的光强较低;当传感器上方是白线时,地面会反射红外线,传感器接收到的光强较高。
通过检测光强的变化,系统可以确定小车当前位置,以便进行相应的控制。
光敏电阻传感器则是通过光敏电阻的电阻值随光照强度变化来实现检测。
当地面上有黑线时,光敏电阻接收到的光照较强,电阻值较低;当地面上是白线时,光敏电阻接收到的光照较弱,电阻值较高。
通过检测电阻值的变化,系统可以判断小车当前所在位置。
二、信号处理传感器感知到的光信号需要经过一系列的处理和分析,以提取有用的信息。
首先,传感器采集到的光信号需要进行放大和滤波处理,以提高信号的稳定性和可靠性。
接着,通过比较传感器输出信号与设定的阈值,判断当前检测到的是黑线还是白线。
最后,根据检测结果,系统会输出相应的电信号给控制系统,以实现对小车运动的控制。
三、控制系统智能小车循迹系统的控制系统通常由微控制器或单片机来实现。
控制系统根据传感器感知到的信号,判断小车当前位置及偏离轨迹的程度,并根据预设的算法进行相应的控制。
当小车偏离轨迹时,系统会根据传感器的输出信号控制电机的转速和方向,使小车重新回到指定轨迹上。
同时,控制系统还可以实现其他功能,如避障、避免碰撞等。
总结:智能小车循迹原理是基于光电传感器的自动导航技术,通过对地面反射光的检测和分析,实现小车在指定轨迹上行驶的能力。
传感器原理主要是利用红外线传感器或光敏电阻传感器来感知地面上的黑线或白线。
基于51单片机循迹小车的设计

基于51单片机寻迹小车的设计摘要:本寻迹小车采用铝合金为车架,STC89C52单片机为控制核心,加以直流电机、光电传感器和电源电路以及其他电路的设计思路。
系统由STC89C52通过I/O口控制小车的前进后退以及转向。
寻迹由ST188型光电对管完成。
关键词:STC89C52 直流电机光电传感器自动寻迹电动车Abstract: The smart car use aluminum alloy for the chassis, STC89C52 MCU as its core, including motor and servo, plus photoelectric sensors, as well as other flame sensor and power circuit. MCU controls the car turning back forward or running on the black line. ST188 reflective photo sensor seeks the trace. Far infrared flame sensor tracks the flame.Keywords: ATmaga32L、Motor、Servo、Photo、sensor、Electrical、fire engines目录一、绪论 (2)1.1立项背景及课题研究的目的及意义 (2)1.1.1 立项背景 (2)1.1.2 课题研究的目的和意义 (3)1.2设计任务与设计要求 (3)1.2.1设计任务 (3)1.2.2设计要求 (3)1.3设计思路 (4)二、总体方案设计 (5)2.1模块方案比较与论证 (5)2.1.2 控制器模块设计 (5)2.1.3 电源模块设计 (5)2.1.4 稳压模块设计 (6)2.1.5 寻迹传感器模块设计 (6)2.1.6 电机模块设计 (6)2.1.7 电机驱动模块设计 (7)2.2最终选取方案 (7)三、硬件实现及单元电路设计 (8)3.1微控制器模块 (8)3.2光电对管电路 (8)3.3电机驱动电路的设计 (9)3.4电源模块设计 (9)3.4.1 12V稳压电源设计 (9)3.4.2 5V稳压电源设计 (10)3.5原理图整合图 (10)3.6整合电路板(PCB)图 (11)3.6.1 顶层图 (11)3.6.2 底层图 (11)3.6.3 整体图 (12)四、软件实现 (13)4.1主程序流程图 (13)4.2软件实现主程序(C语言) (13)五、结论 (16)六、结束语 (16)七、参考文献 (16)一、绪论1.1立项背景及课题研究的目的及意义1.1.1 立项背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
寻迹避障小车原理

循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
循迹避障小车答辩

六、隧道测距方案
由于红外检测具有反应速度快、定位精度高,可靠性强以及可见 光传感器所不能比拟的优点,故采用红外光电码盘测速方案。具体电 路如图所示:
三、黑线检测电路设计
• 探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸 对光的反射系数不同,可以根据接收到的反射光强弱来判断是否是黑 线。利用这个原理,可以控制小车行走的路迹。
四、电机驱动电路
方案一: 采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度
进行调整.此方案的优点是电路较为简单,缺点是继电器的响应时间慢,易损 坏,寿命较短,可靠性不高。
设计背景
人们在不断探讨、改造、认识自然的过程中,制
造能替代人劳动的机器一直是人类的梦想。他可以按 照预先设定的模式在一个特定的环境里自动的运作, 无需人为管理,便可以完成预期所要达到的或是更高 的目标。智能车就是其中的一个体现。智能小车集环 境感知、规划决策,自动行驶等功能于一体的综合系 统,是典型的高新技术综合体。
中的稳定性要求很高,且误测几率较大、易受光线环境和路 面介质影响。在使用过程极易出现问题,而且容易因为该部 件造成整个系统的不稳定。故最终未采用该方案。
方案3:用红外发射管和接收管制作的光电对管寻迹传感器。 红外发射管发出红外线,当发出的红外线照射到白色的平面 后反射,若红外接收管能接收到反射回的光线则检测出白线 继而输出低电平,若接收不到发射管发出的光线则检测出黑 线继而输出高电平。这样制作组装的寻迹传感器基本能够满 足要求,所以我们选择了这个方案。
红外线发射接受电路原理图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分享到...
复制网址邮件QQ空间新浪微博腾讯微博微信人人网开心网网易微博搜狐微博QQ好友淘江湖飞信豆瓣一键分享查看更多(124)
这是什么工具?
JiaThis
分享到各大网站
KC智能循迹小车寻迹小车附电路图智能小车
作者:佚名文章来源:本站原创点击数:176 更新时间:2013-04-12 KC智能循迹小车寻迹小车附电路图含制作方法:
随着素质教育的越来越被重视,很多学校都把制作智能小车作为首选课题,智能小车生动有趣还牵涉到机械结构、电子基础、传感器原理、自动控制甚至单片机编程等诸多学科知识,学生通过动手实践能大
大提高解决实际问题的能力,而且智能小车还是一个很好的硬件平台,只要增加一些控制电路就能完成循
迹小车、救火机器人、足球机器人、避障机器人、遥控汽车等课题。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同
的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断
小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这
一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
在白色的场地上有一条16毫米宽的黑色跑道,我们的循迹小车能沿着黑色跑道自动行驶,不管是跑道如何弯曲小车都能自动行驶真是太神奇了!大家知道当光源射到白色物体和黑色物体上时的反光率是不同的,我们这里用红色的LED作为光源,光线通过地面反射到光敏电阻上通过检测光敏电阻阻值变化能判断小车是否行驶在白色区域上,如果检测到是黑色跑道,说明小车跑偏,这一侧的电机就会减速甚至停转这一侧的绿色的LED熄灭,驱动小车向相反方向行驶,这样小车就能始终沿着跑道行驶了。
本着从简到繁的原则,我们首先来制作一款由数字电路来控制的智能循迹小车,在组装过程中我们不但能熟悉机械原理还能逐步学习到:光电传感器、电压比较器、电机驱动电路等相关电子知识。
下面我们先来熟悉一下三个主要器件:
光敏电阻器件
这就是光敏电阻,它能够检测外界光线的强弱,外界光线越强光敏电阻的阻值越小,外界光线越弱阻值越大,当红色LED光投射到白色区域和黑色跑道时因为反光率的不同,光敏电阻的阻值会发生明显区别,便于后续电路进行控制。
LM393比较器集成电路
LM393是双路电压比较器集成电路,由两个独立的精密电压比较器构成。
它的作用是比较两个输入电压,根据两路输入电压的高低改变输出电压的高低。
输出有两种状态:接近开路或者下拉接近低电平,LM393采用集电极开路输出,所以必须加上拉电阻才能输出高电平。
带减速齿轮的直流电机
直流电机驱动小车的话必须要减速,否则转速过高的话小车跑得太快根本也来不及控制,而且未经减速的话转矩太小甚至跑不起来,我们专门定做的这种电机已经集成了减速齿轮大大降低了制作难度非常适合我们使用。
首先我们来熟悉一下整机的工作原理图,LM393随时比较着两路光敏电阻的大小,当出现不平衡时(例如一侧压黑色跑道)立即控制一侧电机停转,另一侧电机加速旋转,从而使小车修正方向,恢复到正确的方向上,整个过程是一个闭环控制,因此能快速灵敏地控制。
组装步骤:
第一步:电路部分基本焊接
电路焊接部分比较简单,焊接顺序按照元件高度从低到高的原则,首先焊接8个电阻,焊接时务必用万用表确认阻值是否正确,焊接有极性的元件如三极管、绿色指示灯、电解电容务必分清楚极性尽量参考
我们图片的元件方向焊接,焊接电容时引脚短的是负极插入PCB丝印上阴影的一侧,焊接绿色LED时注意引脚长的是正极,并且焊接时间不能太长否则容易焊坏,D4 D5 R13 R14 可以暂时不焊,集成电路芯片可以不插,初步焊接完成后请务必细心核对,防止粗心大意。
第二步:机械组装
将万向轮螺丝穿入PCB孔中,并旋入万向轮螺母和万向轮。
电池盒通过双面胶贴在PCB上,引出线穿过PCB预留孔焊接到PCB上,红线接3V正电源,黄线接地,多余的引线可以用于电机连线。
机械部分组装可以先组装轮子,轮子由三片黑色亚克力轮片组成,装配前请将保护膜揭去,最内侧的轮片中心孔是长园孔,中间的轮片直径比较小,外侧的轮片中心孔是园的,用两个螺丝螺母固定好三片轮片,并用黑色的自攻螺丝固定在电机的转轴上,最后将硅胶轮胎套在车轮上。
用引线连接好电机引线,最后将车轮组件用不干胶粘贴在PCB制定位置,注意车轮和PCB边缘保持足够的间隙,将电机引线焊接到PCB 上,注意引线适当留长一些,防止电机旋转方向错误后便于调换引线的顺序。
第三步:安装光电回路
光敏电阻和发光二极管(注意极性)是反向安装在PCB上的,和地面间距约5毫米左右,光敏电阻和发光二极管之间距离也在5毫米左右。
最后可以通电测试,
第四步:整车调试
在电池盒内装入2节AA电池,开关拨在“ON”位置上,小车正确的行驶反相是沿万向轮方向行驶,如果按住左边的光敏电阻,小车的右侧的车轮应该转动,按住右边的光敏电阻,小车的左侧的车轮应该转动,如果小车后退行驶可以同时交换两个电机的接线,如果一侧正常另一侧后退,只要交换后退一侧电机接线即可。
注意事项:
组装说明书的背面就是循迹小车的简易跑道,客户也可以直接用1.5~2.0厘米黑色的电工胶带直接粘贴在地面上设计成复杂的跑道就更好玩了。