六自由度机械手设计说明书
六自由度机械手重载搬运机器人本体结构设计(全套CAD图纸)
全套设计通过答辩优秀CAD图纸QQ 36396305XX学院毕业设计说明书(论文)作者: 学号:学院(系):专业:题目: 重载搬运机器人本体结构设计【六自由度机械手】2015 年5月全套设计通过答辩优秀CAD图纸QQ 36396305毕业设计说明书(论文)中文摘要机械手是一种典型的机电一体化产品,搬运机械手是机械手研究领域的热点。
研究搬运机械手需要结合机械、电子、信息论、人工智能、生物学以及计算机等诸多学科知识,同时其自身的发展也促进了这些学科的发展。
本文对一种使用在搬运机械手的结构进行设计,并完成总装配图和零件图的绘制。
要求对机械手模型进行力学分析,估算各关节所需转矩和功率,完成电机和减速器的选型。
其次从电机和减速器的连接和固定出发,设计关节结构,并对机构中的重要连接件进行强度校核。
关键词:结构设计,机器臂,关节型机械手,结构分析毕业设计说明书(论文)外文摘要目录1 绪论 (1)1.1 引言 (2)1.2 搬运机械手研究概况 (3)1.2.1 国外研究现状 (3)1.2.2 国内研究现状 (4)1.4 搬运机械手的总体结构 (5)1.5 主要内容 (5)2 总体方案设计 (6)2.1 机械手工程概述 (6)2.2 工业机械手总体设计方案论述 (7)2.3 机械手机械传动原理 (8)2.4 机械手总体方案设计 (8)2.5 本章小结 (10)3 机械手大臂结构设计 (1)3.1 大臂部结构设计的基本要求 (1)3.2 大臂部结构设计 (2)3.3 大臂电机及减速器选型 (2)3.4 减速器参数的计算 (3)3.5承载能力的计算 (7)3.5.1 柔轮齿面的接触强度的计算 (7)3.5.2 柔轮疲劳强度的计算 (7)3.6 轴的计算校核 (8)3.7 大臂的平衡设计 (11)3.7.1 弹簧的受力分析 (11)3.7.2 弹簧的设计计算 (14)4机械手小臂结构设计 (18)4.1 腕部设计 (18)4.2 小臂部结构设计 (31)4.3 小臂电机及减速器选型 (31)4.3.1.传动结构形式的选择 (32)4.3.2.几何参数的计算 (32)4.4 凸轮波发生器及其薄壁轴承的计算 (33)4.4.1柔轮齿面的接触强度的计算 (34)4.4.2柔轮疲劳强度的计算 (35)4.5 轴结构尺寸设计 (36)4.6 轴的受力分析及计算 (36)4.7 轴承的寿命校核 (37)5机械手机身结构设计.......................................................................... 错误!未定义书签。
UR06六自由度工业机器人毕业设计说明书
1)轴承校核:设计中所用的所有重要轴承都要经过强度校核。在满 足尺寸和强度要求的情况下,尽可能地选用国产轴承,以降低机器人的成 本。
2)轴的校核:设计中所用的所有较重要的轴都要经过强度校核和刚 度校核。
本次设计中,通过采用六个特定自由度的运动方式可以使其工作范围大大增加,减 少了工业机器人工作死区(在自身运动范围内却无法到达的位置)。由于工作环境以及 产品美观的要求,本次设计大体采用空心管道结构,各种线都是从轴的内部通过,而且 结构本身材料采用铝合金 2014,极大的减轻了结构的重量,同时由于结构的简单以及紧 凑,更增加了设备的装卸速度,节省了时间。
II
安徽工程大学毕业设计(论文)
目录
第 1 章 绪论 .............................................................................................................................. 2 第 2 章 结构方案确定 .............................................................................................................. 3 2.1 任务介绍 ........................................................................................................................... 3 2.2 结构方案选择 ................................................................................................................... 4 第 3 章 交流伺服电机及减速器选择 ...................................................................................... 5 3.1 交流伺服电机选择 ........................................................................................................... 5 3.2 各关节减速器的选择 ....................................................................................................... 7 第 4 章 结构参数设计 ............................................................................................................ 9 4.1 一号关节 ........................................................................................................................... 9 4.2 二号关节 ........................................................................................................................... 9 4.3 三号关节 ......................................................................................................................... 10 4.4 四号关节 ......................................................................................................................... 11 4.5 五号关节 ......................................................................................................................... 11 4.6 六号关节 ......................................................................................................................... 12 第 5 章 结构校核 .................................................................................................................. 14 5.1 轴的校核 ......................................................................................................................... 14 5.2 轴承校核 ......................................................................................................................... 15 5.3 键的校核 ......................................................................................................................... 16 5.4 螺钉校核 ......................................................................................................................... 16 第 6 章 结论与展望 .............................................................................................................. 18 第 7 章 致 谢 ...................................................................................................................... 20 第 8 章 参考文献 .................................................................................................................. 21 第 9 章 附录 .......................................................................................................................... 22 9.1 附录 A 主要参考文献题录及摘要 ............................................................................... 22 9.2 附录 B 外文翻译 ......................................................................................................... 24
机械手设计说明书doc

机械手设计说明书篇一:机械手设计说明书指导老师:设计合作成员:一、设计项目名称机械手臂手指机构2二、设计目的本设计拟搬运宽度尺寸90~110mm、质量为5kg以内的六菱柱形钢质工件,手指机构带水平转盘。
手指的动力驱动方式为液压传动。
液压传动的机械手是以压缩液体的压力来驱动执行机构运动的机械手。
三、设计要求(1)机械手为专用机械手,适用于夹六菱柱形钢质工件。
(2)选取机械手的座标型式和自由度。
(3)主要设计出机械手的手部机构。
(4)液压传动系统液压缸的选用四、设计方案4.1 机械手基本形式的选择机械手的典型结构一般可分为:回转型(包括滑槽杠杆式和连杆杠杆式两种)、移动型(移动型即两手指相对支座作往复运动)和平面平移型。
本设计采用二指回转型手抓。
4.2 机械手的主要部件及运动本机械手的部件有齿轮、齿条、连杆和液压缸等。
主要的运动有直动液压缸驱动齿条的平动、齿轮和齿条的啮合运动、连杆的转动和手抓的平行移动。
4.3 驱动方式的选择本机械手的驱动方案采用液压机构驱动机械手,结构简单、尺寸紧凑、重量轻、控制方便。
4.4 机械手的技术参数列表用途:卸码垛机械手臂抓重:5kg抓取的物体的几何形状:宽度为90~110mm六菱柱形钢质工件机械手自重:小于等于10kg4.5 机械工作原理机械手的夹工件的工作原理框图如图1所示。
图1. 机械手夹工件的工作原理框图该机械手采用了液压驱动方式来实现其工作的要求,工作要求就是机械手能适应六菱柱形钢质工件不同面的夹持,故带有水平转盘手臂的回转运动。
传动机构采用齿条与齿轮啮合。
本机械通过液压驱动传递动力推动齿条平动,齿条与齿轮啮合将液压缸传来的水平运动转化为齿轮连杆的回转运动。
而齿条与齿轮啮合驱动四连杆转动,四连杆机构使夹板水平移动,完成对工件的夹紧松开。
机械手的整体结构图如图2、图3所示。
手爪部分特点如下表述:1. 机械手手部由手爪(即夹板)和传力机构所构成。
机械手爪能夹宽度尺寸为90~110mm的工件,由于所夹工件是六菱柱形钢质工件,故在竖直方面上夹持会比较方便设计和简化机构,手爪部分可以做成平面夹板,而机构本身应带水平转盘机构以适应不同角度的夹持。
六自由度并联机构设计说明书
(需微要信 swan165本科毕业设计说明书学校代码: 10128 企鹅号: 1663714557 题 目:六自由度伸缩式并联机床结构设计 学生姓名: 学 院:机械学院 系 别:机械系 专 业:机械电子工程 班 级:机电10-4班 指导教师:讲师摘红字要并联系联机微床信,也可叫获取做整套并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),曾经被称为六条腿机床、六足虫(Hexapods)。
并联机床是近年来国内外机床研究的方向,它具有多自由度、刚度高、精度高、传动链短、制造成本低等优点。
但其也不足之处,其中位置正解复杂就是关键的一条。
6-THRT伸缩式并联机床是Stewart 机床的一种变形结构形式,它主要构成是运动和静止的两个平台上的6个关节点分别分布在同一个平面上,且构成的形状相似。
并联机床是一种气动机械,集气(液),在一个典型的机电一体化设备的控制技术,它是很容易实现“六轴联动”,在第二十一世纪将成为主要的高速数控加工设备。
本次毕业设计题目结合本院实验室现有的六自由度并联机床机构进行设计,使其能根据工艺要求进行加工。
提高学生的工程素质、创新能力、综合实践及应用能力。
此次毕业设计的主要内容是对并联机床结构设计,其内容主要包括机器人结构设计总体方案的确定,机器人机构设计的相关计算,以及滚珠丝杠螺母副、步进电机、滚动轴承、联轴器等主要零部件的计算选用,并利用CAXA软件绘制各相关零部件的零件图和总装配图,以期达到能直观看出并联机床实体机构的效果。
关键词:并联机床;步进电动机;空间变换矩阵;滚珠丝杠螺母副AbstractPMT (Parallel Machine Tools), also known as the parallel structure machine (Parallel Structured Machine Tools), Virtual Axis Machine Tool, has also been known as the six-legged machine, six-legged insects (Hexapods).Parallel machine is in recent years the domestic machine tool research hot spot, it has multiple degrees of freedom, high rigidity, high precision, short transmission chain, with low manufacturing cost.But its shortcomings, in which the forward solution of position of a complex is the key. 6-THRT telescopic type parallel machine tool is Stewart machine tools, a deformable structure form, it is the main characteristics of dynamic, static platform on the 6joints are respectively distributed on the same plane, and form the shape similarity.Parallel machine is a mechanical, pneumatic (hydraulic), control technology in one of the typical electrical and mechanical integration equipment. Parallel machine is easy to achieve "six-axis", is expected to become the 21st century, the main high-speed light CNC machining equipment. The combination of hospital laboratory construction project, located six-DOF parallel machine tool sector, so that it can be processed according to process requirements. Improve their engineering quality, innovation, comprehensive practice and application of skills.The main topics for the design of parallel machine tool design, its content includes the determination of robot design, robot design and calculation, and the ball screw pair, stepping motor, bearings, couplings, limit switch, spindle ,and other major components using CAXA software to draw the relevant parts of the parts drawings, and assembly drawings to achieve the parallel machine tool can directly see the effect of physical bodies.Keywords: parallel machine;Six axis linkage;space transformation matrix;ball screw pair目录第一章绪论 (1)1.1 课题的研究背景 (1)1.2 课题研究的意义 (2)1.3 课题的研究内容步骤 (2)1.3.1并联机构介绍 (3)1.3.2并联机床设计类型的选定 (3)1.3.3 并联机床结构设计的相关计算 (4)1.3.4 各零部件与装配图的设计出图 (4)第二章并联机床部件设计与计算 (6)2.1 6-THRT 伸缩式并联机床位置逆解计算与分析 (6)2.1.1 6-THRT并联机器人机械结构简介 (7)2.1.2坐标系的建立 (7)2.1.3 初始条件的确立 (8)2.1.4 空间变换矩阵的求解 (9)2.1.5 新坐标及各轴滑块移动量的计算 (10)2.2 滚珠丝杠螺母副的计算与选型 (12)2.2.1 最大工作载荷的计算 (12)2.2.2 最大动载荷的计算 (13)2.2.3 规格型号的初选 (13)2.2.4 传动效率的计算 (13)2.2.5 刚度的验算 (14)2.2.6 稳定性的校验 (15)2.3 滚动轴承的选用 (15)2.3.1 基本额定载荷 (15)2.3.2 滚动轴承的选择 (16)2.3.3 轴承的校核 (16)2.4 步进电动机的计算与选型 (17)2.4.1 步进电机转轴上总转动惯量的计算 (17)2.4.2 步进电机转轴上等效负载转矩的计算 (18)2.4.3 步进电动机尺寸 (21)2.5 联轴器的选用 (21)第三章并联机床的结构设计 (23)3.1 机床中的并联机构 (23)3.1.1概念设计 (23)3.1.2运动学设计 (23)3.2杆件的配置 (23)3.2.1 杆件设计 (24)3.2.2 伸缩套筒 (25)3.3铰链的设计(虎克铰) (25)3.4机床框架和床身的设计 (26)第四章并联机床的装配出图 (28)4.1 Pro/E软件的概述 (28)4.2 Pro/E的功能 (28)4.3 CAXA电子图版简介 (28)4.4 二维图的绘制处理 (29)第五章并联机床面临的主要技术问题及前景 (30)5.1 引言 (30)5.2机床的关节运动精度问题 (30)5.3 并联机床的未来展望 (31)结论 (32)参考文献 (33)谢辞 (34)第一章绪论1.1 课题的研究背景为了改善生产环境的适应性,满足快速变化的市场需求,近年来制造设备和系统,全球机床制造业正在积极探索和开发新的功能,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(Parallel Machine Tools),又称虚(拟)轴机床(Virtual Axis Machine Tool)或并联运动学机器(Parallel Kinematics Machine)[12]。
六自由度机械手设计说明书要点
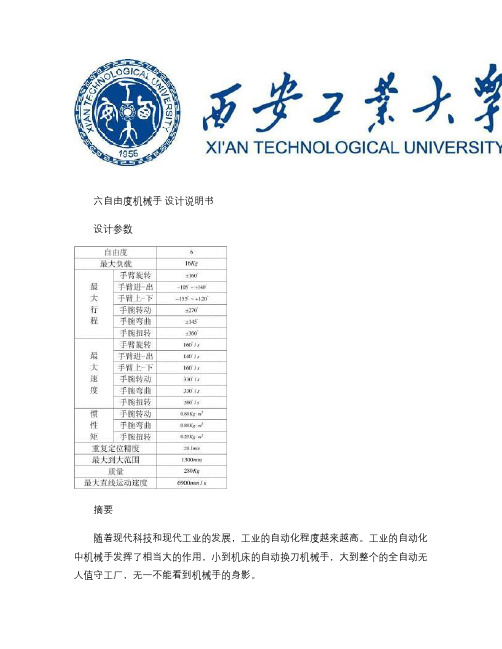
六自由度机械手设计说明书设计参数摘要随着现代科技和现代工业的发展,工业的自动化程度越来越高。
工业的自动化中机械手发挥了相当大的作用,小到机床的自动换刀机械手,大到整个的全自动无人值守工厂,无一不能看到机械手的身影。
机械手在工业中的应用可以确保运转周期的连贯,提高品质。
另外,由于机械手的控制精确,还可以提高零件的精度。
机械手在工业中的应用十分广泛,如:一、以提高生产过程中的自动化程度应用机械手有利于实现材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化的程度,从而可以提高劳动生产率和降低生产成本。
二、以改善劳动条件,避免人身事故在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其他毒性污染以及工作空间狭窄的场合中,用人手直接操作是有危险或根本不可能的,而应用机械手即可部分或全部代替人安全的完成作业,使劳动条件得以改善。
在一些简单、重复,特别是较笨重的操作中,以机械手代替人进行工作,可以避免由于操作疲劳或疏忽而造成的人身事故。
三、可以减轻人力,并便于有节奏的生产应用机械手代替人进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续的工作,这是减少人力的另一个侧面。
因此,在自动化机床的综合加工自动线上,目前几乎都设有机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产。
应用前景工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
(完整版)六自由度机械手
目录摘要 (2)第一章绪论 (3)1.1. 工业机器人概述 (3)1.2机械手的组成和分类 (4)1.2.1. 机械手的组成 (4)1.2.2. 机械手的分类 (5)第二章机械手的设计方案 (7)2.1 机械手的“坐标形式”与“自由度” (7)2.2 机械手的主要参数 (8)第三章手部结构的设计 (9)3.1 末端执行器的设计 (9)3.1.1蜗杆蜗轮型号选择 (10)3.1.2 驱动电机型号选择 (10)3.1.3联轴器的选择 (11)3.2 手腕回转装置设计 (11)3.2.1 驱动电机的选择 (12)3.2.2 锥齿轮的设计 (13)第四章腕部结构设计 (16)4.1 腕部俯仰结构设计 (16)4.1.1 驱动电机的选择 (16)4.1.2 内啮合齿轮的设计 (17)4.2 手腕左右摆动结构设计 (18)第五章肘部与肩部的设计 (19)5.1 肘部结构设计 (19)5.1.1 驱动电机的选择 (20)5.1.2内啮合齿轮的设计 (21)5.2 肩部结构设计 (22)5.2.1驱动电机的选择 (22)5.2.2 锥齿轮的设计 (23)第六章底座的设计 (23)6.1 驱动电机的选择 (24)6.2 蜗轮蜗杆的选择 (24)第七章:ADAMS 模型的建立与仿真 (25)7.1 手部模型的建立 (25)致谢 (29)参考文献 (29)摘要本次所设计的作品是“六自由度机械手”。
六自由度即:腰部回转、肩部摆动、肘部摆动、腕部左右摆、腕部俯仰摆和腕部回转,最终实现“末端执行器”的夹持动作。
方案一:所有传动均选用“齿轮传动”或者“蜗轮蜗杆传动”。
总共需要7个伺服电机来驱动。
首先,腰部电机主轴通过联轴器与蜗杆连接,蜗杆旋转带动蜗轮回转,从而蜗轮再带动底座实现360度回转。
其次,肩部电机主轴通过联轴器与一个锥形齿轮连接,带动另外一个锥形齿轮进行双向旋转,从而实现肩部带动上臂的摆动动作。
再者,肘部电机通过联轴器与一“内啮合”小齿轮连接,而大齿轮与前臂的端部通过平键来周向连接定位。
六自由度机器手运动仿真说明书
六自由度机器手运动仿真摘要机器人是当今工业的重要组成部分,它能够精确地执行各种各样地任务和操作,并且无需人们工作时所需的安全措施和舒适的工作条件。
机械手臂是目前在机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事以与太空探索等领域都能见到它的身影。
本文主要任务是对该机器人的结构进行分析研究并且对其进行运动仿真,同时要求设计者对三维建模软件的应用有较高的要求,运用UG4.0三维建模软件建立串联六自由度机器手机械结构模型,并导入到UG6.0对其进行运动仿真,通过对其进行运动仿真,得出相应工作围。
关键词:传动部件;建模;仿真;AbstractNow the robot is an important part of the industry, it can carry out various tasks and operations precisely without the security measure and the comfortable working condition which people need. It is the automated machinery which is the most widely practical applied in the field of the robot technology, and it can be seen in many areas such as the industrial manufacturing, medical treatment, entertainment, military and space exploration and so on.This main task is the analysis of the structure of the robot and its simulation exercise, Also asked the designer of the 3D modeling software application for a higher,using three-dimensional modeling software to establish the series UG4.0 six degrees of freedom robot mechanical structure model, importing into UG6.0 for motion simulation, and corresponding results are obtained by analyzing comparison.Keywords: transmission parts; modeling; simulation;目录Abstract1引言11机器手的概述12 UG三维建模软件的介绍33 题目的意义与目的4第一章建立六自由度机器手三维模型51.1串联六自由度机器手结构说明51.2 安装尺寸71.3 外形尺寸和最大动作围81.4各关节部位电动机的选定91.5 UG4.0实体建模121.5.1分析机器手结构121.5.2 UG4.0建立六自由度机器手模型零件。
六自由度机械手课程设计
目录第一章前言................................................................................... 错误!未定义书签。
1.1 机器人技术概述………………............................................. 错误!未定义书签。
1.2国外机器人技术发展情况………………............................. 错误!未定义书签。
1.3 设计任务 (4)第二章总体设计 (5)2.1 整体分析 (5)2.2 各部分分析 (5)2.2.1 机械部分 (5)2.2.2 电气部分 (6)第三章机械结构设计 (7)3.1 底部设计 (7)3.2 臂部设计 (8)3.3 腕部设计 (8)3.4 手部设计 (8)第四章电气结构设计 (9)4.1 计算机与AT89S52通信 (9)4.2 AT89S52控制舵机 (10)第五章程序分析 (12)六自由度机械手设计第一章前言1.1 机器人技术概述机器人技术是现代机电一体化技术的最高成果,涉及诸多学科,是当代科学技术发展最为活跃的领域之一。
作为应用最为广泛的机器人技术产物,机械手在工业生产中的应用非常普遍。
近年来,由于劳动力成本上升等因素,我国许多企业已经开始将部分生产交给工业机器人处理,特别是在条件较为恶劣的环境,工业机器人发挥了稳定、高效、适应能力强的特点。
机器人技术是二十世纪的一项重要明,它的问世和应用在减轻劳动强度,提高生产率,把人从危险、恶劣环境下劳动替换出来等方面显示出极大的优越性;并且在宇宙、海洋开发及军事技术上具有重要的应用价值,对各类相关学科的发展也有很大的促进作用。
1.2 国外机器人技术发展情况国外机器人领域发展近几年有如下几个趋势:1.工业机器人性能不断提高(高速度、高精度、高可靠性、便于操做和维修),而单机价格不断下降。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
六自由度机械手设计说明书设计参数摘要随着现代科技和现代工业的发展,工业的自动化程度越来越高。
工业的自动化中机械手发挥了相当大的作用,小到机床的自动换刀机械手,大到整个的全自动无人值守工厂,无一不能看到机械手的身影。
机械手在工业中的应用可以确保运转周期的连贯,提高品质。
另外,由于机械手的控制精确,还可以提高零件的精度。
机械手在工业中的应用十分广泛,如:一、以提高生产过程中的自动化程度应用机械手有利于实现材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化的程度,从而可以提高劳动生产率和降低生产成本。
二、以改善劳动条件,避免人身事故在高温、高压、低温、低压、有灰尘、噪声、臭味、有放射性或有其他毒性污染以及工作空间狭窄的场合中,用人手直接操作是有危险或根本不可能的,而应用机械手即可部分或全部代替人安全的完成作业,使劳动条件得以改善。
在一些简单、重复,特别是较笨重的操作中,以机械手代替人进行工作,可以避免由于操作疲劳或疏忽而造成的人身事故。
三、可以减轻人力,并便于有节奏的生产应用机械手代替人进行工作,这是直接减少人力的一个侧面,同时由于应用机械手可以连续的工作,这是减少人力的另一个侧面。
因此,在自动化机床的综合加工自动线上,目前几乎都设有机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产。
应用前景工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手是在机械化,自动化生产过程中发展起来的一种新型装置。
在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用目录机械手的设计一、方案设计方案一:机械手采用气动控制,气压传动,其优点:1)以空气为工作介质,来源放不安,且用后可直接排入大气而不污染环境。
2)空气粘性小,损失小,节能高效。
3)动作迅速、反应快、维护简单、不易堵塞。
4)工作环境适应性好,安全可靠。
5)成本低、过载能自动保护。
缺点:1)工作速度稳定性差。
2)不易获得较大的推力或转矩。
3)有较大的排气噪声,4)以空气无润滑性能,需在气路中设计给油润滑装置。
方案二:机械手采用电气控制,机械传动,其优点:1)精度高,伺服电机作为动力源,同步带等组成结构简单且效率高的传动机构。
2)控制精度高,根据设定的参数实现精确控制,在高精度传感器、计量装置、计算机技术的支持下,能够大大超过其他控制方式达到的控制精度。
3)改善环保水平,由于使用能源品种的减少及其优化的性能,污染减少了,噪音降低了,能够提供良好的工作环境。
4)降低噪音,其运行噪音低于70分贝,大约是液压驱动的三分之二。
因此选用电气控制,机械传动,局部气动的机械手。
能够更好的发挥两者的优点避免缺点。
二、结构设计气动控制运动结构图如下图所示:电气控制运动结构件图如下图所示:其中电气传动的回转等复杂动作因采用的伺服电机及计算机控制,较气动控制简单,因此该结构选取完全的电气控制。
而其机械手的加持可采用气动控制。
1、 电机的选择机械手除去加持装置总共有六个自由度,总共需用六个伺服电机。
1)主回转轴电机的选用 主电机传动比选择:25i =主回转轴电机转矩,转动惯量计算:222111500.3350.70188J md kg m ==⨯⨯=⋅22221180 1.333.844J md Kg m ==⨯⨯=⋅212max 20.70133.80.055625J J J Kg m i ++===⋅11150100.33541.844T mgr N m ==⨯⨯⨯=⋅2118010 1.352022T mgL N m ==⨯⨯⨯=⋅1241.852022.47225T T T N m i ++===⋅电根据转矩、转动惯量选择电机型号:松下电机MGMA 3KW ,额定转矩28.4N ·m ,最大转矩,63.7N ·m ,电机转动惯量,4255.710Kg m -⨯⋅,额定转速1000r/min,最大转速,2000r/min ,外形分类F 型。
2)大臂摆动电机选用 传动比选择:25i =电机转矩,转动惯量计算:2221180 1.228.844J md Kg m ==⨯⨯=⋅22228.80.00460825J J Kg m i ===⋅电118010 1.248022T mgL N m ==⨯⨯⨯=⋅48019.225T T N m i ===⋅电根据转矩、转动惯量选择电机型号:松下电机MGMA 3KW ,额定转矩28.4N ·m ,最大转矩,63.7N ·m ,电机转动惯量,4255.710Kg m -⨯⋅,额定转速1000r/min,最大转速,2000r/min ,外形分类F 型。
3)大臂转动电机选用 传动比选择:10i =电机转矩转、动惯量计算:22211800.0650.032588J md Kg m ==⨯⨯=⋅220.03250.000325100J J Kg m i ===⋅电11130100.065 4.87544T mgr N m ==⨯⨯⨯=⋅21130100.5582.522T mgL N m ==⨯⨯⨯=⋅12 4.87582.58.737510T T T N m i ++===⋅电根据转矩、转动惯量选择电机型号:松下电机MGMA 900W ,额定转矩8.62N ·m ,最大转矩,19.3N ·m ,电机转动惯量,4211.210Kg m -⨯⋅,额定转速1000r/min,最大转速,2000r/min ,外形分类D 型。
4)小臂摆动电机的选择 传动比选择:15i =22211200.55 1.512544J md kg m ==⨯⨯=⋅2221.51250.005115J J Kg m i ===⋅电 1120100.555522T mgL N m ==⨯⨯⨯=⋅55 3.6715T T N m i ===⋅电根据转矩、转动惯量选择电机型号:松下电机MGMA 900W ,额定转矩8.62N ·m ,最大转矩,19.3N ·m ,电机转动惯量,4211.210Kg m -⨯⋅,额定转速1000r/min,最大转速,2000r/min ,外形分类D 型。
5)小臂转动电机选择 传动比选择:10i =22211200.130.0422588J md kg m ==⨯⨯=⋅220.042250.0004225100J J Kg m i ===⋅电 1120100.065 3.2544T mgr N m ==⨯⨯⨯=⋅3.250.32510T T N m i ===⋅电根据转矩、转动惯量选择电机型号:松下电机MDMA 750W ,额定转矩3.57N ·m ,最大转矩,10.7N ·m ,电机转动惯量,426.210Kg m -⨯⋅,额定转速2000r/min,最大转速,3000r/min ,外形分类D 型 5)手腕摆动电机选择 传动比选择:10i =2221150.0450.002544J md kg m ==⨯⨯=⋅220.00250.000025100J J Kg m i ===⋅电115100.045 1.12522T mgL N m ==⨯⨯⨯=⋅1.1250.112510T T N m i ===⋅电根据转矩、转动惯量选择电机型号:松下电机MQMA 200W ,额定转矩0.64N ·m ,最大转矩,0.91N ·m ,电机转动惯量,420.4210Kg m -⨯⋅,额定转速3000r/min,最大转速,5000r/min ,外形分类A 型。
2、 V 带的选择该机械手中大臂摆动和手腕摆动需要选择V 带。
1)大臂摆动V 带选择 ① 计算功率:1.23000 3.6ca A P K P Kw ==⨯=小带轮转速:11000minrn =由上述数据可以选择带型为A型;根据参考文献【1】P155和P157可以选择小带轮直径为:1100d d mm = 计算得大带轮直径214100400d d d id mm ==⨯= ② 验算带速:111 3.1410010005.23/601000601000d d n v m s π⨯⨯===⨯⨯符合V 带选择标准。
中心距的初算:120120.7()2()d d d d d d a d d +≤≤+ 得03501000a ≤≤,取0800a =;③ 计算相应带长:21200120()2()160078578.1252463.124d d d d d d d L a d d mm a π+≈+++=++=根据参考文献【1】P146,2240d L mm =同时查得长度系数 1.06L K =; ④ 计算中心距:006882d d L L a a mm -≈+= 中心距的变动范围:min 0.01568833.6654d a a L mm =-=-= max 0.0368867.2755d a a L mm =+=+=⑤ 验算小带轮包角:°°°°°12157.357.3180180300155688d d d d a α≈--=-⨯=()大于90°符合要求。
⑥确定带的根数:00 3.64()(0.950.11)0.93 1.06ca ca r L P P z P P P K K α====+∆+⨯⨯根 ⑦ 确定带的初拉力:20min 2(2.5)()500(2.50.93) 3.65000.1 5.230.934 5.23145.2 2.7147.7caK P F qv K zvNαα-=+-⨯=⨯+⨯⨯⨯=+=对于新安装的V 带初拉力为0min 1.5()F ,对于运转后的V 带初拉力应为0min 1.3()F⑧ 计算带传动压轴力:10°2sin224147.7sin 77.51148.1P F zF N α==⨯⨯⨯= 2)手腕摆动的V 带的选择: ① 计算功率:1.22000.24ca A P K P Kw ==⨯=小带轮转速:13000minrn =由上述数据可以选择带型为Z 型;根据参考文献【1】P155和P157可以选择小带轮直径为:175d d mm = 计算得大带轮直径21475300d d d id mm ==⨯= ② 验算带速:111 3.1475300011.775/601000601000d d n v m s π⨯⨯===⨯⨯符合V 带选择标准。