三维实体机构虚拟装配及运动仿真的自动化方法
CAD软件中的零件装配和运动模拟技巧
CAD软件中的零件装配和运动模拟技巧CAD软件是现代工程设计中不可或缺的工具,它可以帮助工程师们进行零件的设计、装配和运动模拟。
本文将介绍一些与零件装配和运动模拟相关的技巧,帮助读者更好地利用CAD软件进行设计工作。
首先,在进行零件装配之前,我们需要先进行零件的设计。
在设计时,应首先充分了解所需零件的功能和尺寸要求,然后使用CAD软件进行绘图。
在进行零件设计时,可以通过设置参数,使用草图和工具创建各种几何形状,并进行必要的修补和修改。
此外,还可以通过添加约束和尺寸来确保零件的精确度和稳定性。
接下来,进行零件的装配。
在CAD软件中,装配过程可以通过将各个零件相对放置并对其进行约束来完成。
在装配过程中,可以使用各种约束类型,如约束、对齐、垂直和水平等,来确保零件的正确安装和运动。
此外,还可以使用零件自动对齐和连接功能,通过简单的拖放和点击操作,快速完成零件的装配。
在进行零件装配后,可以使用CAD软件中的运动模拟功能进行验证。
运动模拟是一种重要的分析方法,可以预测机械装置的运动、相对位置和相互作用等。
在运动模拟中,可以通过增加运动学链、定义零件之间的关系以及应用动力学特性等操作,模拟并分析零件的实际运动。
此外,还可以进行相应的约束和碰撞分析,以确保装配的正确性和稳定性。
在进行零件的运动模拟时,需要注意以下几点技巧。
首先,要确保零件的质量和物理性能参数的准确性,以便获得可靠的模拟结果。
其次,可以利用CAD软件中的动画功能,通过设定适当的帧率和时间间隔,生成包含运动路径和关键帧的动画效果。
此外,还可以通过调整模拟参数,如速度、加速度和初始条件等,来改变运动的特性和行为。
最后,在进行零件的装配和运动模拟时,应注意优化设计,提高效率和可靠性。
通过优化零件的几何形状、反复测试和调整运动关系,可以使装配过程更加顺利和高效。
此外,还可以使用CAD软件中的分析工具,如可视化和报告生成等,对装配和运动模拟结果进行评估和优化。
第1章 三维装配过程仿真基本操作

第一章三维装配工艺规划系统基本操作1.1 开目三维装配工艺规划系统界面简介启动KM3DCAPP-A引入产品模型后,如图1.1-1所示:图1.1-1 KM3DCAPP-A系统界面1.1.1菜单及工具栏文件菜单新建:新建一个空的装配过程文件。
打开:可以打开.kmapd文件或.XML文件(开目信息文件)。
关闭:关闭当前打开的文件。
保存:保存当前的文件,保存的文件的后缀为.kmapd或.XML,当保存为.XML文件时,自动产生工艺文件和三维工艺简图,可以通过CAPP打开编辑。
另存为:将当前文件另存为指定目录。
打印预览:预览三维模型视图区的内容。
打印设置:对三维模型视图区的内容进行打印。
撤销/重做:对系统的操作进行撤销及重做。
退出:退出三维工艺装配工艺规划软件。
开始功能区菜单视图操作菜单拾取:开启/关闭鼠标拾取模型。
旋转:旋转视图。
窗口放大:视图矩形窗口放大。
对齐面:视图方向平行选择的面法向。
移动:平移视图。
动态缩放:动态放大或缩小视图。
充满窗口:视图充满窗口显示。
放大近:三维模型的局部放大实时显示。
标准视图菜单标准视图:正二测视图、正等侧视图、俯视图、前视图、右视图、后视图、仰视图、左视图。
对象显示菜单正常:正常显示三维模型零部件。
线框:指定的零部件以线框效果显示。
线框显示所有:将所有零件线框显示。
透明:指定的零部件以透明效果显示。
透明所有对象:将所有零件透明显示。
隐藏:指定的零部件隐藏。
地面地面:开启后在坐标系ZX面上生成参照地面效果。
阴影:显示地面上几何图形角色的阴影。
镜像:显示地面上几何图形角色的反射。
(注意:镜像不反射角色切除面)网格:显示地面上的网格。
网格属性在地面角色的“属性”窗格上可用。
选中:显示地面参数的属性。
工序作菜单:当勾工作区、属性、样式管理(对各类技术图解的样式进行编辑或管理),对应功能窗口显示。
输出菜单预览卡片:集成KMCAPP的工艺卡片显示。
(需要进行工艺卡片配置及KMCAPP环境)PDF:输出时是将装配过程按活动保存为一页PDF,输出成装配文档。
CAXA三维CAD:约束装配与机构仿真
CAXA三维CAD:约束装配与机构仿真在三维软件中进行机构仿真,可模拟图素、零件、装配等实体的实际运动情况,演示机构运动、进行动态干涉检查,从而提高产品设计能力。
在CAXA实体设计中,只需要为机构模型添加适当的约束,然后为主动件添加动画,即可生成机构仿真。
下面通过一个活塞泵的实例来介绍机构仿真的制作过程。
一、约束定位首先对零件之间进行约束。
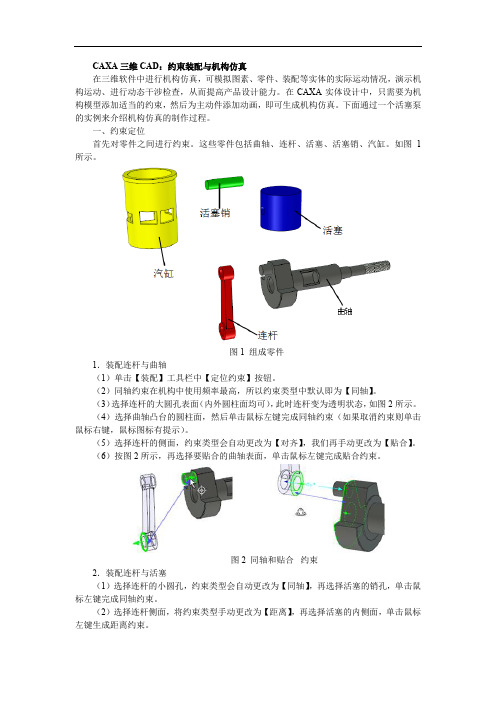
这些零件包括曲轴、连杆、活塞、活塞销、汽缸。
如图1所示。
图1 组成零件1.装配连杆与曲轴(1)单击【装配】工具栏中【定位约束】按钮。
(2)同轴约束在机构中使用频率最高,所以约束类型中默认即为【同轴】。
(3)选择连杆的大圆孔表面(内外圆柱面均可),此时连杆变为透明状态,如图2所示。
(4)选择曲轴凸台的圆柱面,然后单击鼠标左键完成同轴约束(如果取消约束则单击鼠标右键,鼠标图标有提示)。
(5)选择连杆的侧面,约束类型会自动更改为【对齐】,我们再手动更改为【贴合】。
(6)按图2所示,再选择要贴合的曲轴表面,单击鼠标左键完成贴合约束。
图2同轴和贴合约束2.装配连杆与活塞(1)选择连杆的小圆孔,约束类型会自动更改为【同轴】,再选择活塞的销孔,单击鼠标左键完成同轴约束。
(2)选择连杆侧面,将约束类型手动更改为【距离】,再选择活塞的内侧面,单击鼠标左键生成距离约束。
(3)单击约束对话框的【应用并退出】按钮,即绿色对勾,完成目前的约束。
(4)选择连杆或活塞零件,将鼠标移到出现的尺寸值上,如图3所示,当小手图标出现时单击鼠标右键,从弹出菜单中选择【编辑智能尺寸】,在弹出的对话框中输入【值】为3,确定。
图3 同轴和距离约束3.约束活塞和活塞销(1)单击【装配】工具栏中【定位约束】按钮。
(2)选择活塞销中心,使用【同轴】约束,再选择活塞的孔,单击鼠标左键完成同轴约束。
(3)使用【距离】约束,标注活塞的孔和活塞销的轴向尺寸。
(4)单击约束对话框的【应用并退出】按钮,即绿色对勾,完成目前的约束。
如何在CAD中实现零件装配和运动模拟
如何在CAD中实现零件装配和运动模拟CAD(计算机辅助设计)是一种广泛应用的设计工具,广泛应用于工程、建筑和制造等领域。
在CAD中,实现零件装配和运动模拟是设计过程中非常重要的一部分。
通过正确使用CAD软件的相关功能,可以更好地理解零件之间的装配关系,并模拟出零件在实际中的运动情况。
首先,我们需要明确CAD软件中的装配和运动模拟的基本概念。
装配是将多个零件组合在一起,形成一个完整的产品或机构的过程。
运动模拟则是模拟零件在装配体中的运动过程,以便更好地理解产品的功能和性能。
在CAD软件中,常见的实现零件装配和运动模拟的工具有约束、运动学和碰撞检测等功能。
首先,我们需要使用约束功能来实现零件的装配。
通过在CAD软件中设定零件之间的约束条件,可以限制它们的相对位置和运动情况。
例如,可以将一个零件的一个表面与另一个零件的一个边缘进行平行或垂直约束,以确保它们在装配过程中的正确位置。
其次,运动学功能可以模拟零件在装配体中的运动情况。
运动学功能可以帮助我们更好地理解和分析零件的运动行为,并对产品的设计做出相应的调整和改进。
通过设定起始位置、速度、加速度等参数,可以模拟出零件的运动轨迹和运动过程。
此外,CAD软件中的碰撞检测功能可以帮助我们发现零件之间的碰撞情况。
在装配过程中,碰撞是必须避免的,因为碰撞可能会导致装配体的损坏或不正常的运动。
通过设定零件的最小间隙、碰撞检测器的敏感度等参数,可以及时检测到并解决零件之间的碰撞问题。
在进行零件装配和运动模拟时,还需要注意以下几点:首先,要保证零件的CAD模型的准确性。
只有准确的CAD模型才能保证装配和运动模拟的准确性。
因此,在制作零件的CAD模型时,应该仔细测量和绘制每个零件的尺寸和形状,确保其与实际零件相符。
其次,要注意装配体的结构和约束的合理性。
在进行零件装配时,应该考虑装配体的结构是否合理,以及零件之间的约束是否符合实际情况。
只有合理的结构和约束才能保证装配和运动模拟的准确性。
装配式结构三维仿真设计方法

装配式结构三维仿真设计方法随着现代建筑技术的不断进步,装配式结构作为一种新兴的建筑方法,已经逐渐受到人们的关注和应用。
为了保证装配式结构的质量和安全性,三维仿真设计方法成为一种重要的工具。
本文将介绍装配式结构三维仿真设计的方法及其应用。
一、装配式结构的定义和特点装配式结构是指通过在工厂内预制组装构件,并在现场进行拼装的一种建筑方式。
与传统的现场施工相比,装配式结构具有以下显著特点:1. 高度标准化:通过工厂化生产,实现构件的标准化和规模化,提高了生产效率和质量控制能力。
2. 节约时间:由于在生产过程中可以与现场施工同时进行,所以可以大大缩短建筑周期。
3. 资源节约:装配式结构采用的是预制构件,能够最大程度地减少材料的浪费,提高资源利用效率。
4. 环境友好:减少了现场施工产生的噪音、粉尘和废弃物等污染物的排放,对环境保护具有积极的意义。
二、装配式结构三维仿真设计的意义装配式结构的设计和施工过程中存在许多复杂的问题,如构件的连接、变形、承载能力等。
传统的二维设计方法已经无法满足现代化建筑的需求,因此采用三维仿真设计方法具有以下优势:1. 提前发现问题:通过三维仿真设计,可以在实际施工前预先模拟和分析装配过程中可能出现的问题,及时发现并解决。
2. 优化设计方案:通过仿真模拟,可以对装配过程进行多次优化,提高装配效率,降低成本。
3. 提高质量控制:仿真技术可以准确模拟构件的变形和受力情况,帮助工程师评估装配质量和安全性。
4. 减少风险:预先模拟装配过程可以减少现场施工中的风险,避免人员伤亡和设备损坏。
三、装配式结构三维仿真设计的方法1. 建模:根据装配式结构的实际情况,使用专业的三维建模软件进行模型的绘制,包括构件的几何形状、材料等参数。
2. 材料力学性能分析:根据结构的实际承载要求,对装配式结构的构件进行力学性能分析,包括强度、刚度、稳定性等。
3. 装配仿真:在建模的基础上,利用仿真软件对装配过程进行模拟,包括构件的连接、变形、承载能力等。
装配式建筑施工过程中的计算机辅助设计与模拟仿真方法

装配式建筑施工过程中的计算机辅助设计与模拟仿真方法随着建筑行业的发展和技术的进步,装配式建筑在当今社会得到了广泛的应用。
但是,在其施工过程中仍然存在一些问题,如施工效率低、工序安排不合理等。
为了解决这些问题并提高施工效率,计算机辅助设计与模拟仿真方法被引入到装配式建筑施工中。
本文将详细介绍装配式建筑施工过程中常用的计算机辅助设计与模拟仿真方法。
一、3D建模与可视化技术1.1 建筑信息模型(BIM)技术BIM技术可以将设计、施工和运维等各个环节进行集成管理,并形成一个动态的数字化建筑模型。
在装配式建筑施工过程中,BIM技术能够实现对构件逐级组装过程进行模拟仿真。
通过BIM技术,可以检查构件间是否存在碰撞或冲突,并及时解决问题,避免现场出现错误。
1.2 虚拟现实(VR)技术VR技术可以实现对建筑施工场景的虚拟演示,帮助项目管理人员全面了解施工过程和施工方案。
通过VR技术,可以在数字模型中进行分析和测试,并及时发现问题,从而优化施工方案、提高施工效率。
二、碰撞检测与优化2.1 碰撞检测技术装配式建筑的构件数量众多且复杂,并且这些构件需要在有限的空间内进行组装。
因此,碰撞检测是一个非常重要的环节。
计算机辅助设计与模拟仿真方法可以通过建立3D模型来进行自动化碰撞检测,避免普通视觉手段容易忽略的问题。
2.2 优化方法在装配式建筑施工过程中,任何一种不合理的因素都可能导致效率下降甚至事故发生。
因此,在计算机辅助设计与模拟仿真方法中引入优化算法非常重要。
装配式建筑施工过程中常用的优化方法有遗传算法、粒子群算法等。
利用这些优化方法,可以最小化构件之间的冲突,并优化构件的组装顺序,以提高施工效率。
三、模拟与分析3.1 物理力学仿真在装配式建筑施工过程中,各个构件之间的力学特性和相互作用十分复杂。
通过利用物理力学仿真方法,可以对施工过程中的力学问题进行模拟和分析。
比如,可以模拟承重构件在安装过程中的受力情况,以及变形情况,从而评估结构的稳定性,并及时作出调整。
Solidworks/Motion在机械产品设计中的应用技巧
■-
一
一一
i
l
对应X ( 轴 横摇轴 ),R vlt 3 eo ue 是
嘉 L一 n I
… ‘ …
—
: ,
”
1
i
l
I
芒 士o {岳 u 卜 二 c c 】 {上
3 , 用 鼠 标 轴 纵 。
钒
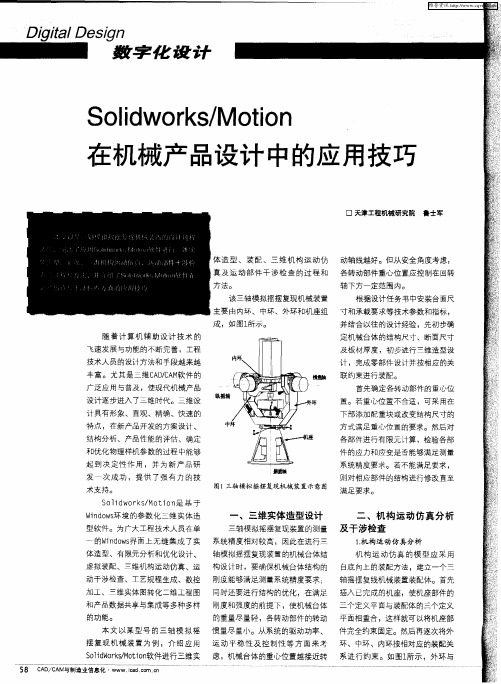
首先确定各转动部件的重心位
置。若重心位 置不合适 ,可采用在
下部添加配重块或改变结构尺寸的
方式 满 足 重 心 位 置 的 要 求 。 然后 对
结构分析 、产品性能 的评估 、确定
和优化物理样机参数 的过程 中能够 起 到决 定 性作 用 ,并 为新 产 品研
各部 件进 行有限元计算 , 检验各 部 件 的应力和应变是否能够满足 测量 系统 精度要求。若不能满足要 求 , 则对 相应部件的结构进行修 改直至
选取 “ e o u e R v ]t ”按钮 ,点击 右 键 ,选择 “ r p r iS P o e t e ”后 见
J—— —皇 j 一
曲 1 2 8 6 5 舛 鸵
图4 仿真设置 窗口
轮 ∞ 住 ¨
如 图3 示 的右 边 窗 口 ,在 该 窗 所
o o 41 g 1 4 3 4 4 6 0O o 71 42 2 3 21 28 5 0
图3设 置 窗 口
设计计算结果的正确性。
如 图2 所示 ,用鼠标 将箭 头所 指按钮1 点下 ,即可 出现 如图3 所示 的左边窗 口。确认R v lt 是否对 e ou e
应 Y ( 摇 轴 ),R v lt 2 否 轴 艏 eo ue 是
:: :“ l .一“ ” 1 r 釜Ⅱ …… m. : = ・… ; t ‘ I
机构运动仿真的一般过程

机构运动仿真的一般过程机构运动仿真的一般过程机构运动仿真是利用数学模型分析实际机构动作情况的一种仿真技术,它广泛应用于工业自动化系统控制、机械产品设计等领域。
一般来说,机构运动仿真的一般过程分为以下几个步骤:(1)创建模型。
在进行仿真之前,首先要创建一个可以模拟实际机构运动的数学模型。
这个模型既要考虑到机构的运动特性,又要考虑到涉及到的物理性质,比如力学状态、物理行为等。
在创建模型的过程中,还要考虑到机构中各个元素的位置和组合如何,以及这些元素之间的相互作用。
(2)进行参数设置。
在创建模型之后,接下来要根据实际机构的情况,设置模型中的参数。
这些参数要包括机构的运动参数,以及机构中的一些材料参数。
这些参数的设置要符合实际机构的运动特性及各元素之间的相互作用情况,才能为模拟提供正确的输入参数。
(3)运行仿真。
当模型创建完毕并且设置输入参数之后,就要进行仿真运行,模拟实际机构的运动情况。
在运行仿真之前,要设定一些仿真控制参数,比如仿真步长、仿真时间、数值方法等。
运行完成后,可以获得机构运动的仿真结果,也可以获得关于机构运动的各个性质的数据,包括位置、速度、力矩等。
(4)结果分析。
最后,对仿真结果进行系统的分析,以确定机构运动的性能是否满足要求。
结果分析的时候,要考虑机构运动的各个性质,包括位置、速度、力矩等,以及各个组件之间的相互作用关系。
从而可以有效地分析机构运动的效果,以决定机构的性能是否符合要求。
以上就是机构运动仿真的一般过程。
机构运动仿真能够及时发现机构运动的问题,为机械设计提供参考,从而提高机构的性能和效率。
基于CATIA的机械零件虚拟装配方法

基于CATIA的机械零件虚拟装配方法机械装配是机械工程领域的重要组成部分。
在传统的机械装配中,工程师需要通过实物模型进行设计和测试。
但是,这种方法既消耗时间又费用昂贵,同时还存在一定的风险。
因此,机械装配的虚拟设计技术越来越重要。
CATIA(计算机辅助三维交互应用)是一种广泛使用的机械CAD(计算机辅助设计)软件。
它允许工程师将机械模型以三维形式进行虚拟设计和测试。
在本文中,我们将探讨基于CATIA的机械零件虚拟装配方法。
在CATIA中,机械零件可以是三维实体、曲面或线框。
在进行虚拟装配时,先需要将这些零件导入CATIA软件中创建一个新的产品。
在这个新产品中,可以使用CATIA提供的功能来操作和调整零件的位置、坐标轴方向和旋转角度。
通过这些功能,可以模拟零件的运动和相互作用。
例如,在一个简单的机械装配中,可能需要将两个零件“螺钉”和“螺帽”组合在一起。
首先,需要通过CATIA的工具将这两个零件导入软件中。
然后,可以通过CATIA的组装工具将螺钉和螺帽组合在一起。
在组装过程中,可以使用CATIA的自动对齐工具,使得两个零件的轴线和位置都是正确的。
然后,可以使用CATIA的碰撞检测功能来确认螺钉和螺帽是否有任何冲突或干涉。
如果有冲突或干涉,可以使用CATIA 的工具调整零件位置和角度,直到满足条件。
在装配完成后,可以使用CATIA的运动仿真工具来模拟整个装配的运动。
这可以帮助工程师识别潜在的问题和缺陷,并优化装配。
通过CATIA进行机械零件虚拟装配的好处是多方面的。
首先,这种方法可以大幅节省时间和成本,避免制作实物模型和原型的需求。
其次,虚拟装配可以提供更高的精度和准确度,因为没有可能因为人为错误和物理限制而出现误差。
最后,虚拟装配可以提供更多的设计灵活性,因为可以随时更改和调整零件位置和安装。
总之,基于CATIA的机械零件虚拟装配方法是一种高效、准确和灵活的设计工具,能够大大简化机械装配的流程,并最终提高产品质量。
多连杆压力机三维实体建模及运动仿真
多连杆压力机三维实体建模及运动仿真以下是一篇多连杆压力机三维实体建模及运动仿真的论文提纲,包括5个章节:第一章:引言- 研究的背景和意义- 多连杆压力机的结构和运作原理- 现有研究文献综述第二章:三维实体建模- 三维建模的基本理论和方法- 多连杆压力机的三维建模流程- 使用的建模软件和建模细节说明第三章:运动学分析- 驱动系统和传动机构的运动学分析- 新的三维建模技术的运动学分析方法- 多连杆压力机的运动学参数第四章:动力学分析- 多连杆压力机的牵引系统- 多连杆压力机的动力学分析理论- 通过车轮避震器等精密研究系统的机能表现第五章:运动仿真与分析- 三维建模和运动学动力学分析模型的三维仿真- 仿真结果的评估和分析方法- 多连杆压力机的实际运行效果的3D模拟- 结论和未来展望以上是一篇多连杆压力机三维实体建模及运动仿真的论文提纲,希望对您有所帮助。
第一章:引言多连杆压力机是一种广泛应用于制造业的重要设备,具有结构简单、操作便捷、稳定性好、能高效完成加工任务等特点。
由于其多连杆的复杂结构和要求较高的运动精度,对其进行三维实体建模和运动仿真研究,可以为其设计优化、运行调试、故障排除等方面提供有效的技术支持。
本章将介绍多连杆压力机的结构和运作原理,并对现有的研究文献进行综述。
1.1 研究的背景和意义多连杆压力机是一种广泛应用于制造业的重要设备,主要用于冲压、铆接、复合和补强等加工工艺。
它的结构简单、操作便捷、稳定性好、能高效完成加工任务等特点,使其在汽车、机械、电子等领域得到了广泛应用。
随着科技的发展和生产需求的变化,多连杆压力机的功能和性能不断提升,如何设计出更加精确、高效、可靠的多连杆压力机,成为了制造业的重要课题。
三维建模和运动仿真是现代设计和制造领域的关键技术,可以帮助工程师们更好地理解设备的运作原理和性能,快速地优化设计方案,降低成本和风险。
在多连杆压力机的设计和开发过程中,三维建模和运动仿真不仅可以提高设计效率,还可以减少试验次数,加快设备上市时间,提高市场竞争力。
数控机床刀架虚拟装配仿真系统的设计与实现
数控机床刀架虚拟装配仿真系统的设计与实现虚拟装配系统以装配对象的三维实体模型为基础,在计算机上对装配操作的全过程进行仿真,真实地模拟和展示产品的相关特性。
虚拟装配系统的作用主要有:在设计和制造阶段,可以通过仿真环境优化产品设计,避免或减少产品实际加工中的反复试制或改进;在装配阶段,可以通过虚拟环境模拟装配过程,利用计算机对装配序列、装配路径的规划进行验证和纠错,从而降低装配成本;将虚拟装配与实际装配相结合,创建沉浸、半沉浸的虚拟环境,对于培训和教学而言,可以提高装配操作人员的工作效率。
数控机床刀架是数控车床的执行机构,是重要的功能部件,它在一定程度上标志着数控车床的技术水平,并且与加工精度和生产效率密切相关。
通过虚拟装配仿真系统可以更加安全、高效地掌握数控机床刀架的工作原理和装拆方法,对于数控机床的检测和故障维修具有重要意义。
LDB4数控机床刀架为经济型数控车床电动刀架,在加工制造业具有广泛的应用场合。
本文以LDB4数控机床刀架的虚拟仿真为背景,以虚拟装配培训为目标,利用虚拟现实技术原理,为产品装配过程的设计、规划和运动仿真分析构建一个实用的平台。
这个系统可通过人机交互的方式,对装配体进行模型展示、装配序列和装配路径的模拟,同时可结合分析验证装配序列的可行性与合理性。
1 系统功能模块及总体框架1.1 开发环境的选择EON Studio是一种虚拟现实环境生成工具,可以依据使用者的意图,研发实时3D应用程序。
本文选用VC++6.0与EON Studio相结合,进行交互式虚拟装配仿真系统的开发。
所设计的数控机床刀架虚拟装配系统,主要应用于教学,系统在满足虚拟装配仿真的基础上,易学易用,操作简便灵活,并具备可拓展的功能。
1.2 系统的构成构建虚拟仿真系统的主要任务是实现数控机床刀架三维可视化模型的展示,按照合理的装配序列和装配路径进行运动仿真和人机交互操作训练。
本文所建立的交互式虚拟装配仿真系统主要包括三维模型创建模块、模型导入模块、装配仿真模块、人机交互模块、功能集成模块。
液压挖掘机的三维实体造型以及运动学仿真
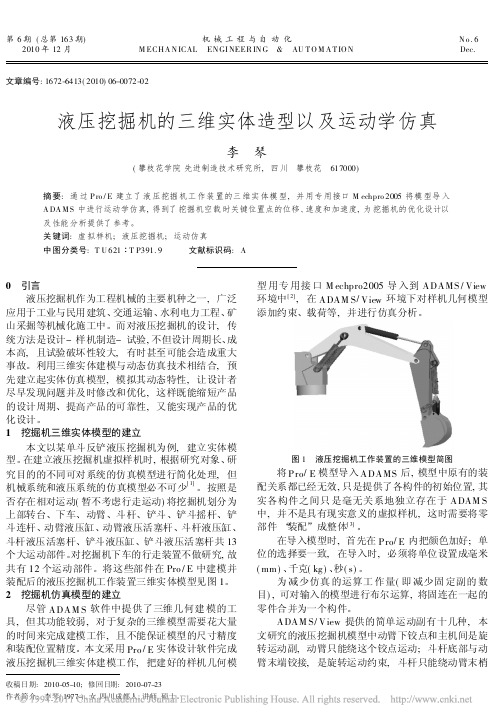
第6期(总第163期)2010年12月机械工程与自动化M ECHA N ICAL EN GI NEER IN G & AU T O M A T IO N N o.6Dec.文章编号:1672-6413(2010)06-0072-02液压挖掘机的三维实体造型以及运动学仿真李 琴(攀枝花学院先进制造技术研究所,四川 攀枝花 617000)摘要:通过P ro /E 建立了液压挖掘机工作装置的三维实体模型,并用专用接口M echpro 2005将模型导入A DA M S 中进行运动学仿真,得到了挖掘机空载时关键位置点的位移、速度和加速度,为挖掘机的优化设计以及性能分析提供了参考。
关键词:虚拟样机;液压挖掘机;运动仿真中图分类号:T U 621∶T P391.9 文献标识码:A收稿日期:2010-05-10;修回日期:2010-07-23作者简介:李琴(1977-),女,四川成都人,讲师,硕士。
0 引言液压挖掘机作为工程机械的主要机种之一,广泛应用于工业与民用建筑、交通运输、水利电力工程、矿山采掘等机械化施工中。
而对液压挖掘机的设计,传统方法是设计-样机制造-试验,不但设计周期长、成本高,且试验破坏性较大,有时甚至可能会造成重大事故。
利用三维实体建模与动态仿真技术相结合,预先建立起实体仿真模型,模拟其动态特性,让设计者尽早发现问题并及时修改和优化,这样既能缩短产品的设计周期、提高产品的可靠性,又能实现产品的优化设计。
1 挖掘机三维实体模型的建立本文以某单斗反铲液压挖掘机为例,建立实体模型。
在建立液压挖掘机虚拟样机时,根据研究对象、研究目的的不同可对系统的仿真模型进行简化处理,但机械系统和液压系统的仿真模型必不可少[1]。
按照是否存在相对运动(暂不考虑行走运动)将挖掘机划分为上部转台、下车、动臂、斗杆、铲斗、铲斗摇杆、铲斗连杆、动臂液压缸、动臂液压活塞杆、斗杆液压缸、斗杆液压活塞杆、铲斗液压缸、铲斗液压活塞杆共13个大运动部件。
装配式建筑施工中的施工工艺虚拟仿真与自动化智能决策系统

装配式建筑施工中的施工工艺虚拟仿真与自动化智能决策系统随着城市化进程的不断加快,人们对于建筑行业在效率和质量方面的要求也越来越高。
为了解决传统建筑施工方式中存在的问题,装配式建筑施工作为一种新兴的建筑模式得到了广泛应用。
同时,为了提高装配式建筑施工效率和质量,施工工艺虚拟仿真与自动化智能决策系统逐渐成为解决问题的关键技术。
I. 施工工艺虚拟仿真在装配式建筑施工中,通过施工工艺虚拟仿真可以在计算机上模拟整个施工过程,包括各种材料、组件以及机械设备等。
这种虚拟仿真技术可以帮助设计师和项目经理更好地预测和规划整个装配过程,并通过调整参数来优化施工方案。
通过施工工艺虚拟仿真,设计师可以在电脑上进行布局、调度和协调各项任务,从而快速确定最优解,并减少施工中可能出现的问题。
此外,虚拟仿真还可以预测施工过程中可能遇到的困难和风险,并制定相应的解决方案。
II. 自动化智能决策系统在装配式建筑施工中,自动化智能决策系统起着至关重要的作用。
这种系统通过传感器、机器学习和人工智能等技术实现自动调度和控制,使得整个施工过程更加高效、精确和安全。
通过自动化智能决策系统,可以实现对施工机械设备的实时监控和调度,在保证施工质量的同时提高施工效率。
该系统还可以进行材料追踪与管理,从而减少资源浪费和物流成本,并确保项目进度正常推进。
此外,自动化智能决策系统还具备故障诊断与处理功能,在设备故障发生时快速切换到备用方案,最大限度地减少了停工时间和损失。
III. 施工工艺虚拟仿真与自动化智能决策系统的优势传统建筑施工方式中存在许多缺点,例如人力资源不足、效率低下、质量无法保证等。
而在装配式建筑施工中,施工工艺虚拟仿真与自动化智能决策系统的应用可以显著改善这些问题。
首先,通过虚拟仿真技术,可以减少人力资源的需求,降低劳动强度,并且提供了更加安全和可控的施工环境。
其次,自动化智能决策系统使得施工过程更加高效、精确和可靠,并且具备快速适应变化的能力。
装配式建筑施工流程虚拟仿真技术
装配式建筑施工流程虚拟仿真技术近年来,随着社会经济的快速发展和科技的不断进步,装配式建筑逐渐成为了未来建筑发展的趋势。
然而,装配式建筑施工过程中存在许多复杂的环节和挑战,如何提高施工效率、降低成本、确保质量成为了亟待解决的问题。
在这样的背景下,装配式建筑施工流程虚拟仿真技术应运而生。
一、虚拟仿真技术简介虚拟仿真技术是指利用计算机系统模拟现实世界中的各种运动或行为。
其核心理论是通过数字化的手段将物理世界中对象及其交互关系描述出来,并进行数学计算、仿真分析等操作。
在装配式建筑施工领域,虚拟仿真技术可以对整个施工流程进行全面模拟和分析,帮助提前发现问题、优化设计,并指导实际施工。
二、装配式建筑施工流程及其挑战1. 装配式构件供应链管理:由于装配式建筑需要大规模的构件供应,供应链管理成为一个关键问题。
如何协调产能、降低物流成本、保证材料质量都需要考虑。
2. 施工过程协调:装配式建筑常常涉及多个环节和多个施工单位的协作。
如何在各方之间进行有效的沟通和协调,避免资源浪费和延误问题是一个难题。
3. 安全与质量控制:装配式建筑过程中,安全事故和质量问题会直接影响项目的进度和形象。
如何实时监控、识别风险,并采取相应措施进行预防与改进是非常重要的。
三、装配式建筑施工流程虚拟仿真技术的优势1. 提前规划与优化:通过利用虚拟仿真技术,可以对施工过程进行提前规划与优化。
从设计阶段开始就可以对可能存在的问题进行模拟分析,避免在实际施工中出现不必要的错误。
2. 效率提升与资源节约:虚拟仿真技术可以帮助项目团队提高施工效率,减少资源浪费。
通过模拟和优化构件运输路径、人力配置等方面,可以达到降低成本、提高效率的目的。
3. 安全风险预判与控制:虚拟仿真技术可以模拟各种施工场景,对可能存在的安全风险进行预判与控制。
通过模拟火灾、坍塌等场景,可以指导项目团队采取相应的安全措施以避免事故发生。
四、虚拟仿真技术在装配式建筑施工中的应用案例1. 构件运输路径优化:通过使用虚拟仿真技术,可以模拟不同运输路径下的时间消耗和资源利用情况,并找到最佳路径以提高效率。
装配式建筑施工中的仿真技术与模拟实验
装配式建筑施工中的仿真技术与模拟实验随着人们对高质量、绿色环保和可持续发展的追求,装配式建筑作为一种现代化、高效率的建筑施工方式逐渐受到广泛关注。
装配式建筑施工需要通过精确的工艺和协调的施工过程来确保质量和安全,并提高施工效率。
为了达到这些目标,仿真技术和模拟实验成为了必不可少的辅助手段。
一、装配式建筑施工中的仿真技术装配式建筑施工中的仿真技术是通过计算机软件模拟出建筑物在设计、生产和施工等阶段的各个过程,以便进行优化和立体感知。
此外,它还可以帮助预测可能出现的问题,并提供解决方案。
以下是几种常用的装配式建筑施工中的仿真技术:1. 建筑物三维模型仿真:利用计算机软件将设计图纸转化为三维模型,从而快速而准确地展示整个装配式建筑物。
2. 工艺流程仿真:对装配式建筑生产过程进行详细模拟,包括材料选用、构件设计、生产安排等。
通过仿真可以及时发现存在的问题,并提前调整工艺流程。
3. 施工场景仿真:利用虚拟现实技术构建施工环境,将操作人员带入到虚拟施工场景中进行培训和演练。
这种仿真能有效降低事故风险,提高施工人员的操作技能。
4. 强度与稳定性分析:对装配式建筑物进行结构分析,验证其承重能力和稳定性,以确保整个装配过程不出现安全隐患。
二、装配式建筑施工中的模拟实验模拟实验是指通过一系列试验和实践活动,在相对真实的环境下对装配式建筑施工过程进行模拟或再现。
下面是几种常见的模拟实验方式:1. 设备交互性测试与评估:通过设备仿真平台对各种机械设备的性能进行测试和评估。
例如,可以利用虚拟环境来测试起重机具体操作时的运行情况以及在不同条件下的负载承受力。
2. 施工流程模拟:为了保证装配式建筑施工的快速和高效,需要模拟出施工过程中可能出现的各种情况。
可以借助仿真设备和仪器,对施工过程进行全过程仿真演练,以发现问题并进行优化。
3. 特殊环境模拟实验:在装配式建筑施工中,有时需要面对特殊气候环境、地形条件或其他困难。
通过模拟实验,可以对各种复杂情况进行测试,并提前做好针对性的准备工作。
如何进行3D打印模型的动态组装和运动仿真

如何进行3D打印模型的动态组装和运动仿真3D打印技术的进步使得人们能够以前所未有的方式制造物体,其中包括可以动态组装和进行运动仿真的模型。
这种技术的应用范围非常广泛,涉及到机械工程、生物学、医学等领域。
本文将介绍如何进行3D打印模型的动态组装和运动仿真。
首先,我们需要准备一些基础的工具和材料。
首先是一台3D打印机,它可以通过加热和喷射熔化的塑料来创建物体。
其次是3D建模软件,例如AutoCAD或SolidWorks,在计算机上设计和创建3D模型。
此外,我们还需要了解基本的力学原理和运动学知识。
第一步是设计3D模型。
通过3D建模软件,我们可以按照所需的形状和尺寸创建物体。
在设计模型时,我们需要考虑其运动的自由度。
例如,如果我们希望模型能够旋转,我们需要确保设计了旋转的关节,并给它们足够的空间来运动。
第二步是将设计好的模型切割成适合打印的部分。
由于3D打印机的打印空间有限,我们可能需要将模型分割成几个较小的部分进行打印。
在进行切割时,我们需要考虑如何重新组装这些部分以实现所需的运动。
第三步是打印模型。
将切割好的部分逐个放置在3D打印机中,按照打印机的指示进行操作。
通常情况下,我们需要使用支撑物来确保打印的部件能够稳定地固定在打印平台上。
一旦打印完成,我们需要小心地将打印出的部件从打印机上取下,并清除支撑物。
第四步是组装打印好的部件。
根据设计好的关节,将各个部件按照正确的顺序组装起来。
可以使用一些简单的工具来帮助我们实现这一步骤,例如螺丝刀或胶水。
确保关节能够灵活运动,并注意不要让部件之间出现过紧或过松的情况。
最后一步是进行运动仿真。
通过运动学知识,我们可以编写一个程序来模拟模型的运动。
例如,如果我们希望模型能够旋转,我们可以编写一个代码来控制旋转关节的角度和速度。
使用模拟器软件,我们可以看到我们设计的模型如何在特定条件下进行运动。
需要注意的是,在进行运动仿真之前,我们应该先进行一些基本的测试,确保模型能够稳定地运动,并没有出现设计上的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维实体机构虚拟装配及运动仿真的自动化方法a姜 杉,王玉新,喻宏波(天津大学机械工程学院,天津300072) 摘 要:基于M DT三维机械设计平台及其A RX开发环境,用面向对象的V C++语言编程,实现了三维实体机构虚拟装配和运动仿真的自动化.与M D T、U G、AD IM S等软件的约束装配动态仿真不同,所提出的确定构件在空间位置的方法不依赖于构件之间的约束,而是采用后台处理分析的方法由分析数据确定,不存在软件对机构自由度和约束复杂程度的限制,防止了机构按约束装配出现的装配唯一性问题的发生.关键词:机构;三维;实体机构;虚拟装配;自动化中图分类号:T P391 文献标识码:A 文章编号:0493-2137(2001)02-0178-05 在工业高速发展的今天,设计与制造的高效与自动化是今后发展的必然趋势.随着机械产品设计朝着面向市场、面向制造、面向产品生命周期方向的发展,虚拟设计,特别是机械产品的创意性虚拟设计受到了人们越来越多的关注和重视.在传统的机构产品概念设计方案中,传动类型和机构结构类型往往是用一些特定符号表示的二维图形,没有三维结构特征尺寸.这种概念设计方案已不能满足虚拟设计和并行设计,以及提高设计效率的要求,因此机械产品的概念设计必须解决三维实体虚拟化的问题.机械产品在性能上向高速重载方向发展,在工业美学设计中向精巧灵活方向的发展.这促使人们在概念设计过程中考虑机械的三维结构特征和三维布局空间要求,以满足负载要求和运动空间要求.本文力图给出一种基于M DT的三维实体机构虚拟装配和运动仿真的自动化方法.1 基本理论1.1 实体生成 在进行虚拟机构装配和运动仿真之前需要生成构件实体,基于M DT环境下利用V C++软件编程,对构件进行三维实体造型.MDT是Auto desk公司开发的具有混合建模技术的实体参数化造型系统,在M DT中可以生成参数化三维实体模型,显示模型的三维渲染图.实时地旋转和平移,可以从任何一个角度观察实体模型.M DT与V C++语言编程软件有应用程序接口,即ObjectARX.ObjectARX是M DT下的一种面向对象C++应用编程接口,它可以在VC+ +开发环境下进行程序设计,编译生成以.ar x为后缀的程序.ARX是随着Window s的发展而出现的,它使用V C++编程,实际上每个ARX程序都是一个动态连接库(.DLL),它直接与Auto CAD进行通讯,因而速度也是最快的.此外由于采用的是面向对象编程策略,程序具有良好的用户界面. 为了建立具有通用性的构件实体模型,需要确定三维实体构件的关键几何特征尺寸,这些几何特征尺寸应包括构件的长、宽、高等三维尺度,以及决定实体构件外观形体特征的尺度.由这些特征尺寸描述构件的三维实体模型,在VC++编程环境下,对实体构件对象进行封装,并以特征尺寸作为与封装对象的交换信息.在进行三维实体机构运动仿真时,根据组成机构各构件的结构形式,如二副杆、三副杆、四副杆等,调用不同的封装对象,在人机交互界面下,输入相关信息,系统便可以自动地完成实体构件的造型.由于在与封装对象的交换信息中含有修改实体结构特征的信息,因此可以很容易地得到需要的实体构件形状.1.2 虚拟机构装配及运动仿真1.2.1 虚拟构件的插入 实体机构的虚拟装配是通过基于MDT软件的 天津大学学报 第34卷 第2期2001年3月JOU RN AL O F T IA N JI N U NIV ER SI T Y V ol.34 N o.2 M ar. 2001a收稿日期:1999-10-13;修回日期:2000-08-28. 基金项目:高校优秀青年教师教学科研奖励基金. 作者简介:姜 杉(1973-),女,博士研究生,助教.ObjectARX 开发工具,用VC ++开发的.ObjectARX 类库包含MDT 图形数据库中所有对象,它提供多种手段访问M DT 图形数据库并且能够对数据库中的实体进行各种操作,例如平移、旋转、拷贝等. 虚拟机构装配首先将各构件的三维实体图形插入到同一个图形文件中,这里用到的构件都是事先按1.1在MDT 中生成的.每一实体构件在图形数据库中相当于一个块,它可作为一个单独的实体对待.虚拟构件的插入,就是将组成机构的实体构件,按一定的插入顺序(该顺序由后台机构运动分析提供的数据顺序决定),将各实体构件插入到工作空间内,并使各构件的坐标原点重合,以便实体仿真时由ARX 命令对实体构件进行平移、旋转等操作.如图1和图2所示,构件原始参数包括一个参考点A (二副杆的孔心),旋转轴线U (过A 点的轴线)及另一个参考点B (二副杆的另一孔心),并且以A B 连线作为构件绕U 轴旋转的起始位置,一般插入点为A ,并且A 点起始坐标为(0,0,0).图1 二副杆Fig .1 Binarylink图2 三副杆Fig .2 Ternary link 当构件第一次插入时,应将构件图连接到当前图形数据库中,如以下程序所示,其中strnamel[i ]为构件图所在的目录及文件名字符串. arg List =ads -buildist (RTST R ,"am catalog ",RTST R,"",RT STR,strnamel[i ]RT 3DPOINT ,p 1,RTST R ,"",0); status=ads -invoke(argList,&r slt); if (argList !=NU LL )ads -relrb (argList ); if (rslt !=N ULL ) ads -r elr b (r slt );构件插入后,随即应取出它在图形数据中的句柄,存入字符串strname[i ]中,程序操作为如下: ads -entlast (ent 0); strcpy (strname[i ],""); entdata=ads -entget(ent0); fo r (ent =entdata ;ent !=NULL ;ent ->rbnex t ) if (ent ->restype ==5) strcpy (strname[i ],ent->resval.rstring); 当构件插入到装配图后,每一构件都有相应的标识.标识包括两种,一种是实体名,另一种是句柄.由于实体名在图文件的不同对话期中会发生变化,而句柄则保持不变,因此应该通过句柄捕捉构件.利用外部引用将构件插入到装配图中,好处是,可以减少装配图所占磁盘空间的大小,提高程序的执行速度.另外,由于装配图与构件图是相关联的,因此在构件图中对于构件结构所作的修改,装配图可以很方便地自动反映出来. 装配时对构件的操作如下:首先按照一定次序,将构件插入到装配图中并捕获它们的实体名,进而捕获相关的句柄,然后将句柄存入一个数据文件中,为以下构件的装配运动模块提供标识.1.2.2 机构的装配及运动仿真 实体机构的运动仿真就是将组成机构的实体构件,按照后台给定的瞬时构件所在的空间位置数据,经过平移、旋转等操作,使每一实体构件占据给定的空间位置,从而实现实体机构的虚拟装配和动态仿真.由VC++开发的基于M DT 的.arx 程序负责读入机构运动分析的后台数据,并将实体构件按句柄文件顺序,对各个构件进行位姿变换的具体操作. 1)沿x 轴方向的平移,构件绕x 、y 、z 轴的转动 391.9905 0 00-2.141802×10-2 2.553168×10-2依次为实体构件参考点从初始位置沿x 、y 、z 轴的平移量,构件从初始位置绕x 、y 、z 的转角. 2)沿x 、y 、z 轴平移,构件绕空间轴线旋转 570443.4621-183.6882 00.38268390.9238794 1.193418×10-2依次为第一个参考点在x 、y 、z 轴坐标值,参考轴单位向量在x 、y 、z 轴方向的分量,构件绕参考轴的角度.・179・ 天津大学学报 姜 杉等:三维实体机构虚拟装配及运动仿真的自动化方法 由于M DT软件内核有一定精度要求,利用2)方法来确定构件在空间的插入位置,往往会出现转角的误差积累现象,为此,使用两个参考点和一个参考轴的方法,相当于使构件上三点重合来确定构件在三维空间的位置,仿真结果表明此方法非常有效. 具体方法是,在构件上指定一个固定点A作为参考点,以过A点的一条固定轴线为参考u轴,再选取另外一点B作为第二参考点.构件从起始位置开始运动,将A点平移到当前位置,然后绕两u轴的叉积方向旋转,使构件u轴从前一方向旋转到当前方向,最后,构件绕u轴旋转,使B点运动到当前位置. 至此,构件就从前一位置运动到当前位置,亦即其数据结构转为两个参考点和一个参考轴. 3)两个参考点和一个参考轴 814.6696 536.2659 -348.71270.98330330.1809435-1.933954×10-2 798.5154618.1683-403.7674依次为第一个参考点在x、y、z轴的坐标值,参考轴单位向量在x、y、z轴方向的分量,第二个参考点在x、y、z轴的坐标值.实现上述操作的主要命令为 ads-com mand(RT STR,"MOVE",RTENAM E, entl,RTST R,"",RT3DPOINT,p1,RT3DPOINT, p2,0);//构件随参考点从p1点平移到p2点// ads-comm and(RTST R,"0,0",RT REAL,ang z, 0);//构件绕M DT通用坐标系的y轴的转动相应的角度// ads-comm and(RT ST R,"ro tate",RTENAM E, entl,RT STR,"",RT STR,"0,0",RTREAL,ang y, 0);//构件绕M DT通用坐标系的z轴的转动相应的角度// ads-comm and(RT ST R,"ro tate",RTENAM E, entl,RTST R,"",RT ST R,"0,0,0",RTREAL, ang no rm,0);//构件绕前一参考轴和当前参考轴的叉积方向旋转ang no rm角度. ads-comm and(RT ST R,"ro tate",RTENAM E, entl,RT ST R,"",RTST R,"0,0,0",RTREA L,an-gax il,0);//构件绕着当前参考轴的方向旋转ang ax il 角度.2 实 例2.1 建立接口程序 建立一个名为ARXshitizaox ing的接口程序,其步骤如下: 1)用VC++建立ARX程序的基本框架; 2)为ARX项目增加ARX的特定代码; 3)增加ARX程序专用调试代码; 4)VC++编译连接环境的设定; 5)ARX的装载、运行、卸载.2.2 运行接口程序2.2.1 实体生成 1)在VC++环境下从“Build”下拉菜单选取“Ex-ecuteACAD.EXE”,启动AutoCAD; 2)进入Auto CAD环境后键入A RX命令,再键入“L”装载ARXshitizaox ong.arx;如果成功装载,则在Auto CAD命令区显示如下提示:“Enter SHITI to bring up the dialog.” 3)键入SHITI命令,弹出对话框(见图3).图3 建立三维实体构件对话框Fig.3 3D solid link creation dialog 若要建立二副杆实体,则在对话框中点击二副杆按钮,然后点取确定按钮,即出现选择二副杆形式的对话框,如图4所示. 若要建立三副杆实体,则在对话框中点击三副杆按钮,然后点取确定按钮,即出现选择三副杆形式的对话框,如图5所示. 本例选取形式1的二副杆,点取确定按钮后,即进入实体生成对话框,如图6所示. 按照图6所示对话框中图示输入相应的构件尺寸,点击确定按钮即可在M DT环境下自动生成所需的二副杆构件实体,如图8a所示. 同理,在如图7所示话框中按照图示输入相应的三副杆构件的尺寸,点击确定按钮,即可在MDT环境下生成所需的三副杆构件实体,如图8b所示.2.2.2 构件的装配与仿真 1)添加数据文件. 把外部机构位置分析程序所提供的数据文件加到・180・天津大学学报 2001年 第34卷 第2期 图4 选择二副杆形式对话框Fig .4 Binary link style selectiondialog图5 选择三副杆形式对话框Fig .5 Ternary link style selectiondialog图6 生成二副杆构件(形式1)对话框Fig .6 Binary link (style 1)creationdialog图7 生成三副杆构件(形式6)对话框Fig .7 Ternary link (style 6)creation dialog此系统中,以使程序在运行过程中调用此数据文件,实现机构的动态仿真. 2)启动M DT. 启动M DT 后,寻找刚生成的ARX 文件,找到后进行加载. 3)执行插入程序. 在命令行中敲入命令,执行插入程序,向新图即装配图中插入构件.其结果如图9所示. 4)执行装配程序. 在命令行中敲入命令,执行装配,运动仿真程序,程序读取经运动分析所得数据文件,对构件进行平移、旋转等操作使构件装配起来,并根据所给定位置的坐标运动,实现运动仿真.其装配图如图10所示.(a)二副杆构件 (b)三副杆构件图8 三维实体构件Fig .83D solid link图9 实体构件的插入Fig .9 Insertion of the solid link图10 实体机构的虚拟装配与仿真Fig .10 Virtual assembly and simulation of the mechanism・181・ 天津大学学报 姜 杉等:三维实体机构虚拟装配及运动仿真的自动化方法3 结 论 与MDT 、UG 、ADIM S 等软件的约束装配动态仿真相比,基于MDT 三维机械设计平台的三维实体机构虚似装配与运动仿真自动化方法,不依赖于构件之间的约束,不存在软件对机构自由度和约束复杂程度的限制. 由于实体构件在空间的位置是利用后台机构运动分析程序得到的,在分析时,通过预先确定二级组或三级组的多解位置数据,可以取得多种位置分析结果,防止了机构按约束装配出现的装配唯一性问题的发生. 与机构运动分析自动化方法集成,可以实现三维实体机构的虚拟装配与动态仿真的自动化.运用该自动化方法可以有效地分析实体机构在空间的相对位置关系和运动干涉情况,对于开展空间的最优布局研究,进而得到有创新性的设计结果非常有价值.参考文献:[1] 王玉新.机构创新设计方法学[M ].天津:天津大学出版社,1996.[2] 木林森等.V isua l C++6.0使用与开发[M ].北京:清华大学出版社,1998.[3] 王金敏等.A utoCA D R 14绘图基础与M DT [M ].北京:国防工业出版社,1998.RESEARCH ON AUTOMATIC VIRTUAL ASSEMBLY AND KINEMATIC SIMULATION OF 3D SOLID MECHANISMJIANG Shan ,WANG Yu -x in ,YU Hong -bo(Scho ol of M echanical Eng ineering ,T ianjin U niver sity ,T ianjin 300072,China )Abstract :I n this paper ,V C ++and A RX are used to make an OO P pr og ra mme .T his pr og ramme can realize t he auto matic v irt ua l assembly and kinemat ic simulation of 3D so lid mechanism.U nlike M DT ,U G a nd A DIM S,t he met ho d pr opo sed in t his paper to get spatial positio ns of kinematic links does no t rely on co nst raint s between links,but on the data o bt aind fr om kinemat ic analy sis backg ro und.T he deg ree of fr eedom and t he co mplex ity of t he mechanism ar e not r estrict ed so a s to prev ent the ocurr ence of uniqueness dur ing assembling the mechanism accor d-ing to co nstr aints.Keywords :mechanism;3D solid mechanism ;virt ual assembly ;kinematic simulation;auto matic・182・天津大学学报 2001年 第34卷 第2期 。