ROS基本设置
ROS软路由超详细的PCC设置步骤,实现一线多拨,五条宽带叠加

PCC实验一、基本配置,使网络能够正常连通1.pppoe拨号:拨通五个帐号PPPOE client的连接状态,已连接设备NAT:5个接口出去都做NAT创建一个bridge,把其他局域网口添加到bridge中。
添加其他局域网口到bridge中DHCP 服务器设置(局域网自动获取IP地址)局域网的网段为192.168.10.0/24把192.168.10.254作为内网的网关设置网关的地址,接口添加到bridge1上一般我们用DHCP setup来自动设置DHCP server这种设置比较简单快速路由配置:所有的基本配置都设置好了,局域网可以正常上网了,但是为了实现更好的网络环境,我们需要做更好的策略。
这就需要使用PCC了,下面就看看PCC怎么做的吧。
二、PCC的配置Mangle标记标记内网地址为192.168.10.0的五条线路的连接标记标记第一条连接:同理:配置剩余的4调链路:5/1,c2; 5/2.c3; 5/3,c4; 5/4,c5.从连接中提取路由标记:从连接里提取路由标记标记第一条连接c1,命令为R1同理:提出其他4调路由命名为R2,R3,R4,R5.标记连接,的命名配置方式为:[admin@MikroTik] /ip firewall mangle> printFlags: X - disabled, I - invalid, D - dynamic0 chain=prerouting action=mark-connection new-connection-mark=c1passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/01 chain=prerouting action=mark-connection new-connection-mark=c2passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/12 chain=prerouting action=mark-connection new-connection-mark=c3passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/23 chain=prerouting action=mark-connection new-connection-mark=c4passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/34 chain=prerouting action=mark-connection new-connection-mark=c5passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/4提取路由的命令5 chain=prerouting action=mark-routing new-routing-mark=R1 passthrough=yes src-address=192.168.10.0/24 connection-mark=c16 chain=prerouting action=mark-routing new-routing-mark=R2 passthrough=yes src-address=192.168.10.0/24 connection-mark=c27 chain=prerouting action=mark-routing new-routing-mark=R3 passthrough=yes src-address=192.168.10.0/24 connection-mark=c38 chain=prerouting action=mark-routing new-routing-mark=R4 passthrough=yes src-address=192.168.10.0/24 connection-mark=c49 chain=prerouting action=mark-routing new-routing-mark=R5 passthrough=yes src-address=192.168.10.0/24 connection-mark=c5回程路由设置需要将从那个口进入就从相应的口回去,即保证每个外网口的数据能得到正确的路由同理标记c2,c3,c4,c5的回程路由提取回程路由同理提取c2,c3,c4,c5命令方式:10 chain=input action=mark-connection new-connection-mark=c1 passthrough=yesin-interface=pppoe-out111 chain=input action=mark-connection new-connection-mark=c2 passthrough=yesin-interface=pppoe-out212 chain=input action=mark-connection new-connection-mark=c3 passthrough=yesin-interface=pppoe-out313 chain=input action=mark-connection new-connection-mark=c4 passthrough=yesin-interface=pppoe-out414 chain=input action=mark-connection new-connection-mark=c5 passthrough=yesin-interface=pppoe-out515 chain=output action=mark-routing new-routing-mark=R1 passthrough=yesconnection-mark=c116 chain=output action=mark-routing new-routing-mark=R2 passthrough=yesconnection-mark=c217 chain=output action=mark-routing new-routing-mark=R3 passthrough=yesconnection-mark=c318 chain=output action=mark-routing new-routing-mark=R4 passthrough=yesconnection-mark=c419 chain=output action=mark-routing new-routing-mark=R5 passthrough=yesconnection-mark=c5路由设置添加五条默认路由,指定标记的路由内网PC上开启迅雷下载资料,可以看到所有的拨号出口都有流量。
ROS软路由详细教程
ROS软路由详细教程ROS(RouterOS)是一种基于Linux内核开发的软路由操作系统,具有丰富的功能和灵活的配置选项。
在本教程中,我将为您提供一个详细的ROS软路由配置教程。
2.连接到ROS路由器3.配置基本设置在登录网页中,输入用户名和密码(默认情况下为“admin”)。
然后,选择“IP”选项卡,并选择“Addresses”子选项卡。
在这里,您可以配置路由器的IP地址、网关和子网掩码。
4.配置网络接口在“Interfaces”子选项卡中,您可以配置网络接口的设置。
首先,选择您要配置的接口,然后为其分配IP地址、设置网关和DHCP选项等。
5.配置DHCP服务器在“IP”选项卡中,选择“DHCP”子选项卡。
在这里,您可以启用和配置DHCP服务器,为连接到路由器的设备分配IP地址和其他网络参数。
6.配置防火墙在“IP”选项卡中,选择“Firewall”子选项卡。
您可以使用防火墙规则来管理网络流量并保护您的网络安全。
可以添加规则以阻止或允许特定IP地址、端口或协议的流量。
7.配置NAT在“IP”选项卡中,选择“NAT”子选项卡。
在这里,您可以配置网络地址转换(NAT)规则,以允许内部网络中的设备访问Internet,并且可以将特定的端口映射到特定的内部IP地址。
8.配置无线网络在“无线”选项卡中,您可以配置无线接口和无线网络的设置。
您可以为无线接口分配一个唯一的名称,选择您喜欢的频率和信道,并配置无线安全性选项(如WPA2-PSK)。
9.配置VPN在“IP”选项卡中,选择“VPN”子选项卡。
在这里,您可以配置各种VPN(Virtual Private Network)协议,如PPTP、L2TP和OpenVPN,以创建安全的远程访问链接。
10.配置路由在“IP”选项卡中,选择“Routes”子选项卡。
在这里,您可以添加和管理路由,以确定数据包的最佳路径。
您可以添加静态路由,也可以使用动态路由协议如OSPF(Open Shortest Path First)。
软路由ROS应用系列之-----ROS的基本配置

软路由ROS应用系列之-----ROS的基本配置在只有一条入网线路接入的情况下,使用软路由ROS让内部主机能够上网,其最基本的配置步骤应分五步走。
第一步:网络接口配置修改-----在Interfaces 列表中修改、定义内外网接口;第二步:添加内外网的IP 地址-----在Ip/Addresses 中添加IP 地址和选择网卡接口,添加内网和外网的IP 地址;第三步:添加默认网关-----在Ip/Routes 里添加默认网关(内外网的网关);第四步,NAT 地址转换-----在Ip/Firewall/NAT 里添加NAT(或“伪装”)规则;第五步,DNS 配置-----在Ip/DNS/Static中的Settings 中添加多个DNS服务器地址,根据需要启用DNS缓存。
下面就来分步图解其最基本配置:第一步:网络接口配置修改有多少张网卡,就显示有多少个网络接口,如果在安装时没有命令内外网卡的名称,则在此可以修改名称,如下所示,内外卡命名为lan,外网卡命名为wan。
lan网卡如下:wan网卡如下:这里用的都是百M网卡,所以在Speed中选择100Mbps,如果是千M的,就选1Gbps。
第二、添加内外网的IP地址IP/Address,设置好的内外网IP如下所示:要给接口添加新的IP(一个网卡接口是可以设置多个IP地址的),单击红色+号按钮,弹出如下菜单,输入内网或外网的IP地址(带掩码位数),网络地址,广播地址以及指定此IP为内网lan或外网wan所设,如下所示:第三步:添加默认网关IP/Routes,单击“+”号添加lan与wan网关,如下所示:[注:下面这张图是这篇文章写完之后很久,用另一个版本2.297中文版来实验后补充的,虽界面有些许不同,但原理一样。
]如下,两个DAC列项是系统配置好了的---如果在安装ROS时配置好了,这里这两个就无须配置,如果没有配置好,可以如上方法加以添加,这里最重要的就是要讲AS列项,即ROS将源于内部的数据包默认丢至外网时所选择的出口IP地址,这里要填写目的:0.0.0.0/0网关:外网的网关地址(这个地址,网络提供商会给你,这点得注意,否则无法让ROS和内部主机上网!)如下所示:第四步:NAT 地址转换IP/Firewall/NAT,单击+号添加规则:单击“Apply”并“OK”,如下所示:[注:下面这三张图是这篇文章写完之后很久,用另一个版本2.297中文版来实验后补充的,这里因为是固定IP,所以推荐用src-nat而不用masquerade 来作NAT,如果是非固定IP上网如拨号之类的,只能用masquerade来处理了。
ROS快速配置上网设置教程
ROS快速配置上网设置教程ROS(RouterOS)是由MikroTik开发的一款操作系统,用于配置和管理路由器设备。
在配置ROS上网设置时,有几个关键步骤需要遵循。
下面是一个ROS快速配置上网设置的教程,详细说明了每个步骤。
1.连接路由器首先,将计算机通过以太网线连接到ROS路由器的网口上。
确保计算机和路由器之间的连接是稳定的。
2. 访问路由器Web界面打开计算机上的任意浏览器,输入路由器的默认IP地址(通常为192.168.88.1)。
在地址栏中输入该地址,并按下Enter键。
这将打开ROS路由器的Web界面。
3.登录路由器在Web界面上,输入默认用户名和密码来登录路由器。
默认情况下,用户名是“admin”,密码为空。
然后点击“登录”按钮。
4.配置LAN接口在Web界面的左侧导航栏中,找到并点击“接口”选项。
然后在下拉菜单中选择“以太网”选项。
接着,找到“接口列表”中的“ether1”,这是连接到你的计算机的接口。
在“ether1”下方有一个按钮标记为“IP设置”,点击它。
在弹出的界面上,选择“静态”并填写你的计算机IP地址、网关和DNS服务器的IP地址。
根据你的网络提供商和网络设置,这些信息可能会有所不同。
然后点击“应用”按钮。
5.配置WAN接口在Web界面的左侧导航栏中,找到并点击“接口”选项。
在下拉菜单中选择“以太网”选项。
找到“接口列表”中的“ether2”,这是连接到你的互联网提供商(ISP)的接口。
点击“ether2”下方的“IP设置”按钮。
在弹出的界面上,选择“动态客户端”选项。
这将允许路由器通过DHCP获取IP地址。
然后点击“应用”按钮。
6.配置NAT规则在Web界面的左侧导航栏中,找到并点击“防火墙”选项。
然后点击“NAT”选项。
在NAT列表中,点击“+”按钮以创建新的NAT规则。
在弹出的界面上,配置以下设置:- Chain: srcnat- Action: masquerade- Out. Interface: ether2(WAN接口)点击“应用”按钮。
ros系统常见命令和用法
ROS系统常见命令用法1. ROS环境搭建与更新ROS环境搭建通常包括安装ROS包、配置环境变量、设置sources等步骤。
具体过程可参考ROS官方文档或相关教程。
在更新ROS环境时,可以使用apt-get update && apt-get upgrade命令来更新系统。
对于非系统级别的更新,如安装新的ROS包,可以使用apt-get install ros-<ros-distro>-<package-name>。
2. 常用ros命令行工具介绍* roscore: 启动ROS主节点,相当于启动ROS系统的控制台。
* rostopic: 用于发布和浏览ROS主题。
例如,rostopic echo <topic>将打印出指定主题上的消息。
* rosparam: 用于设置和获取ROS参数服务器上的参数。
例如,rosparam set /my_param 10设置名为my_param的参数,其值为10。
* rosbag: 用于记录和播放ROS消息的日志文件。
例如,rosbag record -a记录所有主题的消息,rosbag play -a播放所有主题的消息。
* rqt: ROS图形用户界面工具,可以用来查看ROS主题、发布消息、设置参数等。
3. 节点与发布者-订阅者机制在ROS中,节点是运行ROS程序的最小单元,发布者是发布消息的节点,订阅者是接收消息的节点。
一个节点可以同时作为发布者和订阅者。
节点间的通信基于发布-订阅模型,即节点通过发布特定主题的消息来传递信息,其他节点通过订阅这些主题来接收消息。
4. 导航包构建与使用ROS导航包是实现机器人自主导航的一组工具和算法集合。
它提供了对机器人进行位姿估计、路径规划、避障等功能。
使用导航包需要配置机器人模型、设置机器人参数、启动导航节点等步骤。
在构建导航包时,需要按照官方文档提供的步骤进行操作,例如编写机器人描述文件、配置导航参数等。
ROS基本的OSPF配置
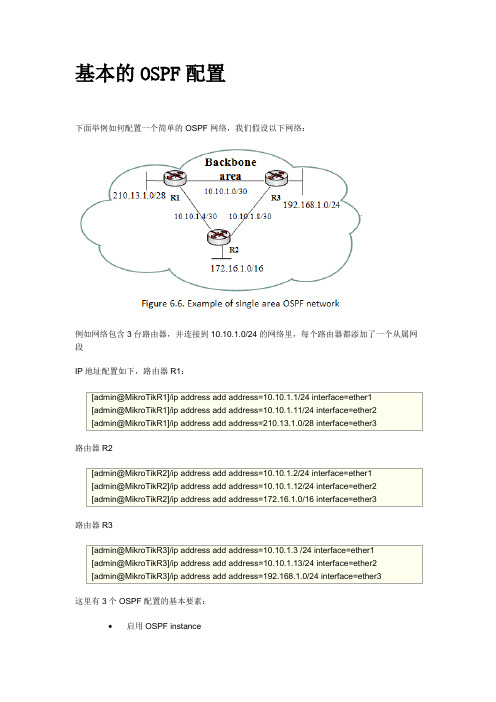
基本的OSPF配置下面举例如何配置一个简单的OSPF网络,我们假设以下网络:例如网络包含3台路由器,并连接到10.10.1.0/24的网络里,每个路由器都添加了一个从属网段IP地址配置如下,路由器R1:[admin@MikroTikR1]/ip address add address=10.10.1.1/24 interface=ether1[admin@MikroTikR1]/ip address add address=10.10.1.11/24 interface=ether2[admin@MikroTikR1]/ip address add address=210.13.1.0/28 interface=ether3路由器R2[admin@MikroTikR2]/ip address add address=10.10.1.2/24 interface=ether1[admin@MikroTikR2]/ip address add address=10.10.1.12/24 interface=ether2[admin@MikroTikR2]/ip address add address=172.16.1.0/16 interface=ether3路由器R3[admin@MikroTikR3]/ip address add address=10.10.1.3 /24 interface=ether1[admin@MikroTikR3]/ip address add address=10.10.1.13/24 interface=ether2[admin@MikroTikR3]/ip address add address=192.168.1.0/24 interface=ether3这里有3个OSPF配置的基本要素:•启用OSPF instance•OSPF区域配置•OSPF网络配置基本信息配置在/routing ospf instance菜单下。
ROS软路由详细设置_图文全解
ROS软路由设置提示:此软件为顶级软路由软件!赶快用吧!记的要《全盘ghost!不是分区ghost恢复哦!是全盘恢复!》不要怀疑软路由的性能,也不用担心所谓的耗电多少。
所谓的软路由耗电大,只不过是商家搞的噱头而已。
软路由完全不需要显示器、键盘鼠标。
甚至,可以在BIOS 里设置系统启动完即关闭硬盘。
至于主板,带集成显卡的即可。
这样的配置下来,软路由功率仅仅20-30瓦左右。
软路由具有极高的性能和广泛的应用。
可轻易实现双线策略、arp绑定、限速、封杀BT 以及网吧借线、vpn等。
尤其对有连锁网吧经营者,利用IPIP协议,不仅可实现借线目的,还可象本地操作一样远程管理其他网吧。
这些,一般硬路由根本无法与之比拟。
我以前对硬路由一直情有独钟,换上软路由后,对它的强大功能赞叹不已。
现在利用它的内置VPN技术轻易做出电信网通加速软件-南北网桥(),又给两家网吧试做了IPIP借线,在这种比较大的压力下,软路由依然运行良好。
我软路由配置:730主板,128M内存,早期的AMD800毒龙CPU,集成显卡和一个8139网卡,外加两块3C905网卡抓图状态:vpn在线拨号,IPIP二家网吧,总用户数量在500多。
ROS软路由基本设置非常简单,如果只做路由转发,以下几步数分钟即可高定:硬件准备:A.首先下载软路由的ghost硬盘版,本站已经在压缩包总提供!B.释放后,ghost至一个小硬盘(20G以下),注意,是整盘GHOST而不是分区。
C.将该硬盘挂在要做路由电脑上,注意必须接在第一个IDE并且是主硬盘接口。
插上一张网卡,这是接内网的LAN。
开机。
软件设置:1.开机,出现登陆提示。
用户:admin 密码:空2.输入setup再按两次A3.在ether1后面输入你的内网IP,如:192.168.0.254/24 (这里/24是24位掩码与255.255.255.0一样)4.输入完ip后,按两次x退出,现在可以可以ping通192.168.0.254了,也可用winbox在图形界面下访问路由了。
ros安装及设置完整版
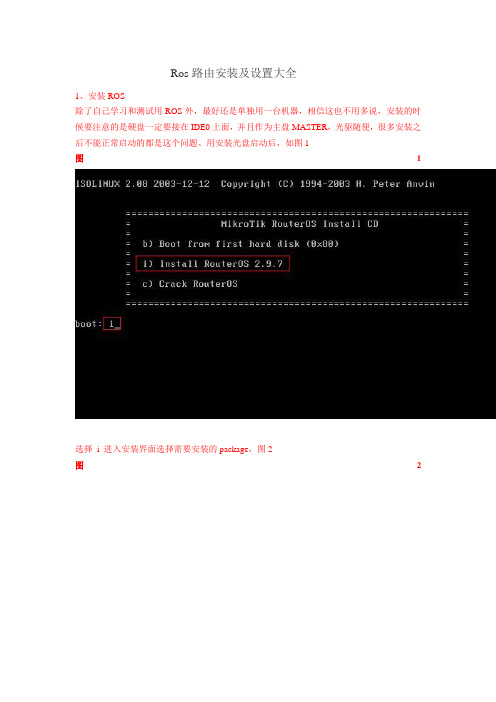
Ros路由安装及设置大全1、安装ROS除了自己学习和测试用ROS外,最好还是单独用一台机器,相信这也不用多说,安装的时候要注意的是硬盘一定要接在IDE0上面,并且作为主盘MASTER,光驱随便,很多安装之后不能正常启动的都是这个问题、用安装光盘启动后,如图1图1选择i 进入安装界面选择需要安装的package,图2图2选择完后,再按i安装,y确定,再按n不保存旧配置。
最后回车重新启动,这时进入ROS 是未注册的版本,如图4图4用光驱启动,在启动菜单按c破解,图5图5破解之后进入已经没有了未注册提示。
见图6图32、服务端配置/interface pri 能显示出你现在可用的网卡。
如图6图6/ip addressadd address=192.168.1.1/24 interface=ether1设置ether1为内网IP,其中192.168.1.1/24添自己的内网IP ,设置成功没有提示,可以用pri查看见图7图73、winbox配置(所有配置都在这里进行)在局域网其他机器IE浏览器192.168.1.1 进入WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX输入IP和用户名连接(图8)图8进入配置界面(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。
图9 图9(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添网通和电信给的IP/子网掩码(不要和我的一样...),红*部分是自动添加的.图10图10(3)IP->ROUTE,+号添加默认的网关,默认网通就添网通网关,默认电信就添电信的网关,这里默认电信.如图11,正常下黑圈处为AS,黄圈出为ment设注释为tel图11(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡里为masquerade.OK,现在可以通过电信上网了.图12图12(5) 上传路由表文件cnc.rsc,如图13图13在WINBOX中,NEW TERMINAL,输入import cnc完成.如图14图14现在已经可以电信网通自动切换了.(6)只是切换也不太安全,一定要配制一下防火墙么,同5一样,上传防火墙的RSC文件到192.168.1.1,在NEW TERMINAL里执行import firewall,整体和第5步相近.(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的~~~图16至此,基本OK了.第一次写教程用了2个多小时呵呵..有什么不完整的地方欢迎大家补充,大家可以从本站下载R OS 2.9.6破解版。
ROS软路由详细设置

ROS软路由详细设置ROS软路由基本设置非常简单,如果只做路由转发,以下几步数分钟即可高定:硬件准备:1、首先下载软路由的ghost硬盘版,2、释放后,ghost至一个小硬盘(20G以下),注意,是整盘GHOST而不是分区。
3、将该硬盘挂在要做路由电脑上,注意必须接在第一个IDE并且是主硬盘接口。
插上一张网卡,这是接内网的LAN。
开机。
软件设置:1、开机,出现登陆提示。
用户:admin 密码:空2、输入setup再按两次A3、在ether1后面输入你的内网IP,如:192.168.0.254/24 (这里/24是24位掩码与255.255.255.0一样)4、输入完ip后,按两次x退出,现在可以可以ping通192.168.0.254了,也可用winbox在图形界面下访问路由了。
5、关机,插上另一张网卡,这个是接外网的,即WAN,现在可以去掉软路由电脑的显示器和键盘了。
6、开机,运行winbox以admin身份登陆7、添加外网网卡。
在ip---address里按+,address输入你的外网ip和掩码位,比如218.56.37.11/29。
network和BROADCAST不填,INTERFACE里选择ethr28、增加外网网关。
ip-routes按+,Destination用默认的0.0.0.0/0 ,Gateway输入外网网关,比如218.56.37.109、实现NAT转发:IP-FIREWALL在NAT里点+,在ACTION里选masquerade10、现在该路由已经做好雏形,可以正常上网了。
其他的诸如防火墙、双线策略等,可以参考其他资料。
安装完成后什么都没有设置的情况下.登录用户: admin密码: 为空1、查看已安装的网卡>/int>pri2、确认已安装两块网卡后,如果看到网卡前面的英文为X,则要激活网卡,2.9系列版本是自动激活网卡的.>enable 0>enable 13、激活之后网卡前面的英文为R,然后改网卡名字,>set 0 name=lan>set 1 name=wan>/这里“/”为退出的意思4、设置内网卡IP和子网掩码>set>a>a>lan回车后输入你服务器内网卡的IP地址,我的内网卡的IP地址是192.168.1.1 ,下面IP后面的“/24”是代表子网掩码255.255.255.0 , 192.168.1.1/24回车后按G设置网关192.168.1.15、设置外网卡IP和子网掩码>set>a>a>wan回车后输入你服务器外网卡的IP地址,下面IP后面的“/29”是代表子网掩码255.255.255.248,如果你的子网掩码不是255.255.255.248,请自己计算,不要跟着我填29210.137.174.1/29回车后按G设网关219.137.174.193然后按X退出。
ROS安装及配置教程11
ROS安装方法及设置教程ROS的配置要求CPU和主板–核心频率在100MHz或更高的单核心X86处理器,以及与兼容的主板。
RAM –最小32 MiB, 最大1 GB; 推荐64 MB或更高。
ROM –标准ATA/IDE接口〔SCSI和USB控制器不支持;RAID控制器驱动不支持;SATA不完全支持〕最小需要64 Mb空间;Flash和一些微型驱动器使用ATA接口能连接使用。
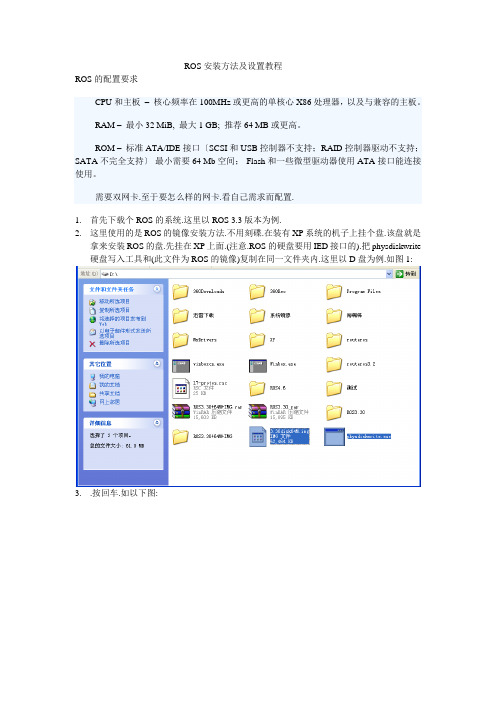
需要双网卡.至于要怎么样的网卡.看自己需求而配置.1.首先下载个ROS的系统.这里以ROS 3.3版本为例.2.这里使用的是ROS的镜像安装方法.不用刻碟.在装有XP系统的机子上挂个盘.该盘就是拿来安装ROS的盘.先挂在XP上面.(注意.ROS的硬盘要用IED接口的).把physdiskwrite 硬盘写入工具和(此文件为ROS的镜像)复制在同一文件夹内.这里以D盘为例.如图1:3..按回车.如以下图:4..接着会问你是否确定.输入y.然后会把镜像写入硬盘.写入完了手动重启即可.如以下图.5.开机之后.会重启几次.当提示输入用户名和密码的时候输入admin.密码为空.直接回车进去.第一次进入程序会自动进展破解.破解完会自动重启(这里下载的这个镜像会自动破解的.如果是另外下载的.请参考他给予的破解方法进展破解).当第二次进入的时候就可以使用了.输入用户名和密码进入就可以使用ROS了.安装到这就完毕了.接下来进展配置. physdiskwrite和这2个工具放到C盘进展安装.)6.配置网卡方法.进入ROS后.输入/int(简写即可)-pri进展查看网卡信息.如以下图:Lan网卡是内网.wan网卡是外网.这些名字是自己改的.初始的名字是ether1和ether2.Lan和wan前面的R表示网卡以激活.为X的话表示未激活.7.输入命令;/ip add进展配置网卡.然后输入add adderss=这里是内网的IP.这里设置为192.168.0.1/24.24表示子网掩码.然后是要修改的网卡名字.完整的命令是如以下图:这里就配置好网卡了.然后在浏览器输入192.168.0.1,这里是路由的IP.点击右边的winbox把winbox下载下来.然后在winbox输入IP.用户名是admin.密码为空.如图.点击链接.进入路由的控制界面.如图:8.进展配置路由.点击如以下图:点击IP-Address设置第二块网卡的IP也就是外网IP比方我的是假设外网IP是:假设外网掩码是:255.255.255.0就这样设Address:Network:Broadcast:Interface:这里选择外网的网卡.我的是wan如以下图:9.增加静态路由再次点去Ip-Route设置路由表.很简单点击+号Destination这个如果用.0/0就表示路由所有ip段其他不懂就不要设了.Gateway:这里就是设网关的输入你的外网网关比方我的外网网关为192.168.1.1.如以下图:10.设置DNS.在IP-DNS这里设置.进入后点击settings设置DNS如以下图:完了点击OK11.设置NAT共享上网点击IP-Firewall设置共享上网选Nat点+选第一项GeneralChain:srcnat选第四项Action设置Action:masquerade这样设置就可以共享上网了.到这就能上网了.接下来就是设置DHCP这些了.12.进入WINBOX后选IP POOL在这里添加地址池,NAME设置为DHCP,ADDRESSES设置192.168.0.*-192.168.0.*这里设置你要分给下面机器的IP段.后进入IP-DHCPSERVER设置网关和DNSNAME=DHCP,INTERFACE=LAN ,lease-time=3d,ADDRESS POOL=DHCP,其他默认~ 如图:在设置ip->dhcp-server->network,address=192.168.0.0/24,gateway=192.168.0.1,netmask=24\dns-server=192.168.0.1?根据ISP给你的DNS来设置如以下图:到这DHCP就设置完成了.接下来设置绑定MAC地址.未绑定的机子不给上网.13.应用要求:将IP与MAC地址绑定,制止改IP与改MAC地址者上网。
ROS软路由详细最完整教程
ROS软路由详细最完整教程第二步:进行基本设置通过浏览器访问默认IP地址,并使用管理员用户名和密码登录。
进入系统后,首先进行基本设置。
首先设置设备的主机名和时区,然后进行LAN和WAN接口的配置。
配置WAN接口时,需要根据所提供的网络信息填写IP地址、子网掩码、默认网关和DNS服务器。
第三步:配置DHCP服务器在RouterOS中配置动态主机配置协议(DHCP)服务器,以便为局域网上的设备分配IP地址。
选择IP选项下的DHCP服务器,并进行基本配置,包括地址池、默认网关、DNS服务器和IP地址的分发。
第四步:设置NAT网络地址转换(NAT)是一种将私有IP地址转换为公共IP地址的技术,用于将内部网络与Internet连接起来。
在RouterOS中配置NAT规则,可以实现多个内部设备共享单个公共IP地址。
选择IP选项下的Firewall,然后选择NAT选项,进行配置。
添加源地址和目标地址,并将内网IP地址映射到公共IP地址。
第五步:设置防火墙规则使用防火墙能够保护网络免受未经授权的访问和恶意攻击。
在RouterOS中配置防火墙规则,可以控制流量的进出规则。
选择IP选项下的Firewall,然后选择Filter Rules选项,进行配置。
添加适当的规则,以允许或拒绝特定的IP地址、端口和协议。
第六步:配置VPN虚拟专用网络(VPN)可以在公共网络上创建私有、加密的链接。
在RouterOS中配置VPN,可以使远程用户能够安全地访问内部网络。
选择IP选项下的IPsec选项,进行VPN配置。
添加预共享密钥、远程PEER和IPv4子网。
第七步:配置无线网络如果使用无线网络连接,可以使用RouterOS进行无线配置。
选择无线网络选项,并进行配置,包括SSID、加密方式和密码。
第八步:监控和管理配置完成后,可以使用RouterOS提供的监控和管理工具来监视和管理网络。
其中包括网络流量监控、日志记录、远程访问和系统升级等。
RouterOS配置记录(一):基础设置

必须要填的会以红色表示,在上图中,要填的是Name和Interfaces。
Interfaces指的是哪个网口连接了宽带网线,一般来说,RouterBoard的第一个网口我们都用来连接外网(WAN),所以选择第一个网口即可(如上图所示,我给第一个网口做了重命名,修改名称为ether1-wan)。
在第二个标签页Dial Out中,就需要填写你的宽带账号和密码了,此外Use Peer DNS和Add Default Router也可以勾选上。
Use Peer DNS指的是是否使用宽带运营商提供的DNS(在PPPoE拨号的时候能得到),一般都需要使用,当然你也可以不用运营商提供的DNS,自己定义一些DNS server,比如Google的8.8.8.8, 8.8.4.4,还有OpenDNS的208.67.222.222, 208.67.220.220。
只是使用这些DNS的话,你要先把翻墙准备好。
在Winbox的IP –> DNS里面,就可以自己设置DNS server:在上图中可以看到,Dynamic Servers就是来自宽带运营商的DNS server信息。
而Allow Remote Requests指的是,RouterBoard本身是否也作为一个DNS server从而可以响应DNS查询请求。
一般来说,这个应该enable。
顺理成章的,下面的一些有关Cache的配置也就变的有意义了,如上图所示,我加大了Cache的size,从而可以多缓存一些DNS信息。
不过在enable了Allow Remote Request之后,需要注意要打开TCP/UDP的DNS端口,以防客户端无法通过RouterBoard查询DNS。
回到宽带拨号,配置好了PPPoE Client之后,就可以尝试去enable它了,一旦连接成功,就表示你的宽带拨号大部分都非常好理解,有几个地方需要注意:Channel Width,这里有所谓的HT Above和HT Below,有关这个的解释是(来自Mikrotik官方):ht above and ht below allows to use additional 20MHz extension channel and if it should be located below or above control (main) channel. Extension channel allows 11n device to use 40MHz of spectrum in total thus increasing max throughput.不过需要注意的是,不是所有的Frequency都可以设置Above/Below,这里有一张来自Mikrotik的表说明了这一点,所以最终在设置Frequency的时候需要注意:Frequency,上面已经提到了,设置Frequency要注意HT Above/Below是否有取值,此外可以通过点击Scan按钮来查看当前环境中有哪些Frequency是被占用的,尽量挑选一个没人使用的频率吧。
ROS软路由详细设置_图文
ROS软路由设置提示:此软件为顶级软路由软件!赶快用吧!记的要《全盘ghost!不是分区ghost恢复哦!是全盘恢复!》不要怀疑软路由的性能,也不用担心所谓的耗电多少。
所谓的软路由耗电大,只不过是商家搞的噱头而已。
软路由完全不需要显示器、键盘鼠标。
甚至,可以在BIOS 里设置系统启动完即关闭硬盘。
至于主板,带集成显卡的即可。
这样的配置下来,软路由功率仅仅20-30瓦左右。
软路由具有极高的性能和广泛的应用。
可轻易实现双线策略、arp绑定、限速、封杀BT 以及网吧借线、vpn等。
尤其对有连锁网吧经营者,利用IPIP协议,不仅可实现借线目的,还可象本地操作一样远程管理其他网吧。
这些,一般硬路由根本无法与之比拟。
我以前对硬路由一直情有独钟,换上软路由后,对它的强大功能赞叹不已。
现在利用它的置VPN技术轻易做出电信网通加速软件-南北网桥(.nbwq.),又给两家网吧试做了IPIP借线,在这种比较大的压力下,软路由依然运行良好。
我软路由配置:730主板,128M存,早期的AMD800毒龙CPU,集成显卡和一个8139网卡,外加两块3C905网卡抓图状态:vpn在线拨号,IPIP二家网吧,总用户数量在500多。
ROS软路由基本设置非常简单,如果只做路由转发,以下几步数分钟即可高定:硬件准备:A.首先下载软路由的ghost硬盘版,本站已经在压缩包总提供!B.释放后,ghost至一个小硬盘(20G以下),注意,是整盘GHOST而不是分区。
C.将该硬盘挂在要做路由电脑上,注意必须接在第一个IDE并且是主硬盘接口。
插上一网卡,这是接网的LAN。
开机。
软件设置:1.开机,出现登陆提示。
用户:admin 密码:空2.输入setup再按两次A3.在ether1后面输入你的网IP,如:192.168.0.254/24 (这里/24是24位掩码与255.255.255.0一样)4.输入完ip后,按两次x退出,现在可以可以ping通192.168.0.254了,也可用winbox在图形界面下访问路由了。
ROS软路由最基本的上网配置教程
ROS软路由最基本的上网配置教程ROS软路由最简单的上网配置教程一般拿到了RouterOS软路由,肯定要做的事情就是使用它来上网。
以 RouterBOARD 750(下面简称 RB750)为例配置简单的上网教程系统版本5.25;RB750的接口数量:5口拿到ROS设备后的简单的上网配置步骤:1.通电,测试接口状态(每个口插上网线指示灯正常);2.复位设备:让设备无任何默认配置(通过winbox 登录设备后复位,也有其他方式);3.配置外网的连接方式(pppoe 拨号或是专线);4.配置内网网关I P;5.DNS配置6.DHCP配置;7.路由配置;8.NAT配置;9.系统时间配置;10.系统备份首先我们做下简单的规划:1口不使用(因为很多1口是POE供电口,有时候拿来供电,我就不喜欢用)2口做外网口,3-5口做内网口内网网关:192.168.1.254/24内网DHCP地址段:192.168.1.100-192.168.1.200DNS地址:61.139.2.69 8.8.8.8配置步骤:1.通电,测试接口状态(每个口插上网线指示灯正常);用网线插到ROS设备的每个接口上,另一头插到交换机或者电脑上面,看看接口灯是否能正常,在电脑上用winbox登录,是否能够登录;2.复位设备:让设备无任何默认配置(通过winbox登录设备后复位,也有其他方式);Winbox复位设备:用winbox登录到ROS上后,按以下图1方式操作,操作成功后ROS会重启。
3.配置外网的连接方式( pppoe拨号或是专线);专线的话就直接添加你申请到的 I P地址到2口上面,如图2拨号连接,如图 34. 配置内网网关IP;3-5口作为内网口,我们添加到一个bridge上,这样不管你使用那个口都可以,如图4、图5。
配置bridge1的IP地址为192.168.1.254/24,如图 6 .5.DNS配置配置DNS地址为61.139.2.69 8.8.8.8,如图76.DHCP配置;内网网段为192.168.1.100-192.168.1.200,如图8-图13.7.路由配置;添加默认路由为拨号口1 .如图14 .8.NAT配置;配置一个全局伪装,如图15.9.系统时间配置,如图16,17 .10.系统备份配置完了我们把系统备份下,方便以后恢复(1)全局备份,所有的配置都在里面,包括ROS登录帐号密码和系统的配置,如图18.(2)配置条目备份,只有配置相关信息,如图19.。
ROS教程设置总结
ROS教程(1)---基本配置一、LAN口配置:(admin为用户名,密码为空登录控制台)1、查看已经安装的网卡>interface print (可缩写为int pri)2、更改网卡名字〉int〉pri>set 0 name=lan3设置内网卡的ip和子网掩码(先返回顶层目录,用“/”键)〉ip address add address=192.168.194.1/24 interface=lan4、打开winbox,以192.168.194.1为地址,admin为用户名,密码为空登陆。
5、在winbox下单击"interface"--->双击列表中"name"栏中的连接ISP的网卡--->"name"更名为"WAN"。
二、WAN口配置:1、通过ADSL拨号上网(1)如果电信等ISP已将帐号和相关的MAC地址绑定过,则需要修改WAN口MAC地址,否则跳到下一步。
在winbox下单击"new terminal"--->输入命令"interface ethernet"--->set WANmac-address=00:00:00:00:00:00--->通过print命令查看修改是否成功。
(2)建立pppoe连接到电信或其它ISP。
"PPP"--->"+"--->"general"选项卡--->在"name"中拨号名,如Tel,在"interface"中选择WAN口--->"Dial out"选项卡中,"user"域中输入用户名,"password"中输入密码(ISP提供的),并且确保"Add default Route"处于选中状态--->"apply"--->"OK"。
Ros基本设置

Ros基本设置1、判断网卡及改名:安装时将外网网线拔掉,内网网线插上,则在winbox中:Interfaces 下有流量的网卡为内网网卡,没有流量的网卡为外网网卡,双击网卡分别改名为lan 和wan2、ROS上网设置IP\Address:(1)设置内网网卡IP,lan:192.168.18.1/24(2)设置外网网卡IP,wan:192.168.10.92/24 (固定IP)(外网IP也可以设为自动获得)一、设置外网网卡IP的另一种方法:在webbox中配置外网网关和IP:网关:Interface\Default gateway:[ ] (输入外网网关)设置外网IP(两种获得IP方式):在外网网卡点击disable(或点击已有IP)进入:(1)动态获取外网IP:选择 obtain an IP address automatically(DHCP)\点OK(2)固定IP:选择 configure an IP address manually\点OK设置外网IP(address)和外网掩码(Netmask)二、设置外网网关和IP也可在winbox中进行:网关:IP\Routes:Gateway:192.168.10.1 (外网网关)IP:IP\address\双击wan (设置外网IP和掩码)(3)设置DNS在winbox下:IP\DNS\settings:primary DNS [218.85.157.99]seconday DNS [202.101.107.98](4)伪装IP\firewall\NAT chain:src-nat Action:masquerade(5)若ROS路由没有启用DHCP服务器,则在客户端必须给要上网的电脑配置IP,如:IP地址:192.168.18.50子网掩码:255.255.255.0默认网网关:192.168.18.1首选DNS服务器:218.85.157.99备用DNS服务器:202.101.107.98在ROS中启用DHCP服务的方法:(若启用则在客户端不必设置IP)(*)IP\POOL 添加,name:myPool IP段,如:192.168.18.2-192.168.18.100(*) IP\DHCP Server(#)DHCP\点加号,Name:myDHCP,Interface:lanleaseTime:3d Address Pool:myPoolAuthoritative:yes(#)Networks\点加号,Address:192.168.18.0/24Gateway:192.168.18.1Netmask:243、查看ROS安装的组件:System\packages (点uninstall可以卸载相关的组件)4、ROS如何安装添加新组件:(1)用IE打开ROS的ftp服务器,用ftp://192.168.18.1用户名:admin 密码:空(2)进入ROS的ISO文件中,将所要的*.npk包复制到ROS的ftp就可以了,之后只要重新启动ROS即可,ros会自动读ftp中上传的npk包并安装5、解除IP绑定:(1)Interfaces\双击内网网卡lan\ARP下拉栏\enabled(2)IP\ARP\ctrl+A 全选,删除6、限速(#1) Queues\simple Queue 点加号:General\name: 192.168.18.80 (可以是中文)Targetget Address: 192.168.18.80/32[@] Target upload [@] TargetDownloadMax limit [ 128k ] [ 128k ] bits/sAdvanced\Interface:[all](#2)Queues\GeneralName:[ ] (输入名称)Target Address 不必填[@] Target upload [@] Target DownloadMaxlimit [ 1k ] [ 1k ] bits/sAdvancedDst.Address:[ 192.168.18.80/32] (输入欲限速电脑的IP)Interface [all]其余按默认或可根据需要填写,之后,对其余电脑限速时,在Advanced的选项卡上点击copy进行限速规则复制,只需更改name:[ ]和IP即可(#3)解除限速:将限速规则删除即可(在IP\Queues 中删除即可)7、指定可以登录Webbox和ftp服务器的电脑:登陆wibbox\IP\Services(1)双击www\在弹出的对话框中可以指定登陆webbox 的ip和端口号port(2)双击ftp\在弹出的对话框中可以指定登陆ftp的ip 和端口号port。
ros常用配置命令
ros常用配置命令ros常用配置命令2008-01-20 19:08首先是运用winbox.exe 登陆,初始用户admin 密码空(1)代理上网,interfaces-ether1改名为LAN——》OK,ether2改名为WAN——》OK,(设置内网网关即内网IP)IP——》Adresses——》+ ——》Adress(填写内网网关例如192、168、0、1/32)(设置外网网关即外网IP)IP——》Adresses——》+ ——》Adress(填写外网网关例如64、183、33、132/24)(2)IP伪装,IP——》Firewall——》NAT页——》General页——》China——》选择srcnat——》Action页——》Action——》选择masquerde——》OK(注:这样才能代理下面的机子上网)(3)虚拟拨号Interfaces——》+ ——》PPPoE Client——》NEW Interface——》Dial Out页——》User(填个用户名)——》Password(填个密码)——》OK看一下新建的拨号连接状态:点开刚才新建的拨号(pppoe-out1)就可以看到了现在要做伪装了,IP——》FIREWALL——》NAT页——》General页——》China——》选择srcnat——》Action页——》Action——》选择masquerde——》OK(4)密码修改:Password——》Old Password(填写旧密码)——》New Password(在些输入要设置的密码)——》Confirm Password(确为密码)——》OK(5)现在就是端口了,IP——》Scevice——》IP Service List——》Ftp(改面你可为接受的)——》IP Service <ftp>——》Port(改成2121)——》Available From(这个位置是你要限IP段访问不,限制就写你要的IP段)(6)远程访问Telnet——》Telnet——》Address(输入IP地址)——》connect(7)限制BTIP——》Firewall——》Filter rulter页——》General页——》China选择forward)——》protocol(选择(6)tcp)——》P2P(选择all-p2p)——》Action——》Action:选择drop(翻译一下就是所有的包都drop(丢弃))——》OK(8)单个IP限速Queues——》+ ——》Name(任意填,不能为空)——》Dst.Address(为要限制的IP地址,一般为内网的)——》Interface(这里为要限制的是内网还是公网,一般为公网,不然内网速度会很慢)——》Priority:8 (默认)——》Max Limit (tx/rx):这里就是要限制的速度了。
ROS 设置
关于 ROS机器人操作系统 (ROS) 是一个用于编写机器人软件的灵活框架。
它包含了一系列给开发者使用的工具,如代码库等,旨在降低设计机器人动作难度,并且让机器人可以在各种平台上执行复杂的机器人任务。
安装 ROS进入ROS 网站来选择您需要的版本。
在这个教学中,我们将会使用ROS Kinetic同时安装到Ubuntu 16.04 LTS (Xenial Xerus).如果您正在下载ROS Kinetic 在Ubuntu上, 我们建议您参阅以下操作请点这里.您可以参考右侧的图片列表,其中显示了必须以正确的顺序运行的所有命令,以便成功安装ROS Kinetic。
以下是每个命令的说明:Setup source.list (1/8)Setup keys (2/8)Update the package lists (3/8)Desktop-Full Install (4/8)Initialize rosdep (5/8)Update rosdep (6/8)Environment Setup (7/8)Install rosinstall (8/8)sudo sh -c ‘echo “deb /ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’sudo apt-key adv –keyserver hkp://:80 –recv-key421C365BD9FF1F717815A3895523BAEEB01FA116sudo apt-get updatesudo apt-get install ros-kinetic-desktop-fullsudo rosdep initrosdep updateecho “source /opt/ros/kinetic/setup.bash” >> ~/.bashrcsource ~/.bashrcsudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential(1/8)(2/8)(3/8)(4/8)(5/8)(6/8)(7/8)catkin_makeecho “source ~/catkin_ws/devel/setup.bash” >> ~/.bashrc source ~/.bashrc gedit ~/.bashrcprintenv | grep ROS Check the environment variables(1/5)(2/5)(3/5)(4/5)(5/5)ROS设置完成!此时,ROS已完全安装并可以使用 !尝试运行roscore以确保它正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
硬件准备:
1、首先下载软路由的ghost硬盘版,如果没有,从/download/ros297.rar下载
2、释放后,ghost至一个小硬盘(20G以下),注意,是整盘GHOST而不是分区。
3、将该硬盘挂在要做路由电脑上,注意必须接在第一个IDE并且是主硬盘接口。
插上一张网卡,这是接内网的LAN。
开机。
软件设置:
1、开机,出现登陆提示。
用户:admin 密码:空
2、输入setup再按两次A
3、在ether1后面输入你的内网IP,如:192.168.0.254/24 (这里/24是24位掩码与255.255.255.0一样)
4、输入完ip后,按两次x退出,现在可以可以ping通192.168.0.254了,也可用winbox在图形界面下访问路由了。
5、关机,插上另一张网卡,这个是接外网的,即W AN,现在可以去掉软路由电脑的显示器和键盘了。
6、开机,运行winbox以admin身份登陆
7、添加外网网卡。
在ip---address里按+,address输入你的外网ip和掩码位,比如218.56.37.11/29。
network和BROADCAST 不填,INTERFACE里选择ethr2
8、增加外网网关。
ip-routes按+,Destination用默认的0.0.0.0/0 ,Gateway输入外网网关,比如218.56.37.10
9、实现NA T转发:IP-FIREW ALL在NA T里点+,在ACTION里选masquerade
10、现在该路由已经做好雏形,可以正常上网了。
其他的诸如防火墙、双线策略等,可以参考其他资料。
这篇文章是我自己按经验来编写的,安装过程太简单了,就不说了,希望能帮到大家
安装完成后什么都没有设置的情况下.登录
用户: admin
密码: 为空
1、查看已安装的网卡
>/int
>pri
2、设置内网卡IP和子网掩码
>set
>a
>a
>lan
回车后输入你服务器内网卡的IP地址,我的内网卡的IP地址是192.168.1.1 ,下面IP后面的“/24”是代表子网掩码255.255.255.0 ,
192.168.1.1/24
回车后按G设置网关
192.168.1.1
3、设置外网卡IP和子网掩码
>set
>a
>a
>wan
回车后输入你服务器外网卡的IP地址,下面IP后面的“/29”是代表子网掩码255.255.255.248,
如果你的子网掩码不是255.255.255.248,请自己计算,不要跟着我填29
210.137.174.1/29
回车后按G设网关
219.137.174.193
然后按X退出。
4、查看IP设置情况
>ip add
>pri
假如网卡1设错,删除设错的网卡,
重启一次,完成后在其它机用winbox登入
5、设置DNS
IP →dns→settings
然后输入
202.96.128.68
202.96.134.133
8、最后一步,设置共享上网
2.9系列的版本选择
IP→Firewall-nat →选择“+”号→Action-masquerade
这样你的ROS就可以共享上网了。
其实也很简单的。
此设置基本上适合2.8和2.9的各版本
(注释:这里掩码是用8进制,简单说24就等于255.255.255.0 这样简单解释吧
255.255.255.255 = 11111111.11111111.11111111.11111111 这里有32个1,就是32了
255.255.255.0 = 11111111.11111111.11111111.00000000 这就是24了)
24位=255.255.255.0
25位=255.255.255.128
26位=255.255.255.192
27位=255.255.255.224
28位=255.255.255.240
29位=255.255.255.248
30位=255.255.255.252
31位=255.255.255.254
32位=255.255.255.255
ROS安装录象0
二安装ROS
1.全部选择即可。
全选输入A,同意选择输入I,回车,询问你:注意啦,所有数据(功能),都要被安装(选择了),是否继续,输入Y即可。
它又询问,是否保存旧配置,输入N回车,接下来开始创建分区,格式化硬盘,安装服务。
提示软件安装完成,输入回车重起。
之后ROS就会独立启动了。
启动后又问了,是否检测硬盘。
通常不必检测了,因为耽误时间。
默认他自动选N。
我们也可以直接输入N的。
OK。
ROS启动了。
输入账号ADMIN。
默认为空密码。
可以了。
登陆进来了。
因为是破解版。
所以不会提示未注册。
输入命令/int pri
查看网卡是否两快
2.设置ROS的IP地址
输入命令/ip address
我的2块网卡都认到了,如果你的没有认到,请重新插下网卡,或者更换其他网卡
输入命令add address=192.168.0.1/24 interface=ether1
好了。
ROS的IP地址设定好了,我设置的是192.168.0.1为网关地址。
大家根据自己的实际情况设置就可以了。
/24是为啥,
相信不必多说了。
这个/就是子网掩码的2进制1的个数,一个十进制255等于8个二进制的1,我设置子网掩码为255.255.255.0。
所以就是3个十进制的8个1。
也就是24啦。
OK。
继续。
在IE里输入http://192.168.0.1来访问ROS。
呵呵,顺利,打开了ROS的WEB界面。
那么下载WINBOX吧。
账号为admin密码为空。
3.进入WEB界面配置等以后在讲
ros 2.9 网吧配制教程2007-10-16 12:21
网吧专用ros软路由教程(非常详细)
2、服务端配置
/interface pri 能显示出你现在可用的网卡。
add address=192.168.1.1/24 interface=ether1
设置ether1为内网IP,其中192.168.1.1/24添自己的内网IP ,设置成功没有提示,可以用pri查看
3、winbox配置(所有配置都在这里进行)
在局域网其他机器IE浏览器192.168.1.1 进入WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX输入IP和用户名连接
进入配置界面
(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。
(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添网通和电信给的IP/子网掩码(不要和我的一样...),红叉部分是自动添加的
3)IP->ROUTE,+号添加默认的网关,默认网通就添网通网关,默认电信就添电信的网关,这里默认电信.
如图11,正常下黑圈处为AS,黄圈出为ment设注释为tel
(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡里为masquerade.OK,现在可以通过电信上网了
(5)上传路由表文件cnc.rscFTP://admin:@192.168.1.1
在WINBOX中,NEW TERMINAL,输入import cnc完成
现在已经可以电信网通自动切换了.
(6)只是切换也不太安全,一定要配制一下防火墙么,同5一样,上传防火墙的RSC文件到192.168.1.1,在NEW TERMINAL 里执行import firewall,整体和第5步相近.
(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的。