驱动程序入门
NI-DAQ快速入门指南
WDM驱动程序

建立驱动开发环境建立驱动开发环境,所需的软件为DriverStudio3.2 + DDK2003 + VC。
DDK建议使用最新的DDK2003,因为可以减少很多麻烦。
使用DDK2600的话,很多人反映会碰到一个编译出错的问题。
这是我使用DDK2600时碰到的同样的问题,然后在EDNchina网站上发的贴:--------------我在用DriverStudio开发驱动时,碰到了这样的问题:--------------------Configuration: KFileWrite - Win32Free--------------------d:\DESIGN~1\DRIVER~1\DRIVER~4\include\kcsq.h(35): Could not find the file csq.h.d:\DESIGN~1\DRIVER~1\DRIVER~4\include\kcsq.h(35): Could not find the file csq.h.Linking with DDK linker...LINK : fatal error LNK1181: cannot open input file 'ntstrsafe.lib' Error executing link.exe.KFileWrite.sys - 1 error(s), 0 warning(s)关键是这个ntstrsafe.lib.我在网上一搜,碰到这种问题的人还不少呢,虽然解决方法是很多,但都差不了几个字,要么从DDK2003那拷一个,或者是在project-->setting-->link下去掉对ntstrsafe.lib的链接,也不知他们自己到底有没有试,我在project-->setting-->link下压根就没看到ntstrsafe.lib几个字...很郁闷啊--------------网上所说的解决方法是对的,但没有说清楚,使人无法一时明白。
C语言设备驱动编程入门

C语言设备驱动编程入门C语言设备驱动编程是一项常见的技术,用于编写操作系统的设备驱动程序。
设备驱动程序是操作系统与硬件设备之间的桥梁,它负责将用户操作转化为硬件设备能够理解和执行的指令。
本文将介绍C语言设备驱动编程的基本概念和入门知识,帮助读者了解并入门这一重要的编程技术。
一、设备驱动程序概述设备驱动程序是操作系统的一部分,它与操作系统内核紧密结合,用于实现对硬件设备的控制和管理。
设备驱动程序通常由硬件设备制造商提供,或者由操作系统开发者开发。
它负责处理硬件设备与操作系统之间的通信,使得用户能够方便地操作硬件设备。
设备驱动程序可以分为字符设备驱动和块设备驱动两种类型。
字符设备驱动用于处理流式数据的设备,如键盘、鼠标等;块设备驱动用于处理以块为单位的数据的设备,如硬盘、U盘等。
不同类型的设备驱动程序在实现上有所不同,但都需要用C语言编写。
二、设备驱动程序的基本结构设备驱动程序的基本结构包括设备初始化、设备打开、设备关闭和设备读写等函数。
下面我们逐步介绍这些函数的作用和实现方法。
1. 设备初始化函数设备初始化函数负责对设备进行初始化,包括设备的寄存器配置、中断设置等。
在这个函数中,我们需要了解硬件设备的相关规格和特性,并根据需要进行适当的配置。
2. 设备打开函数设备打开函数在设备被用户程序打开时被调用,它负责向操作系统申请资源,并进行相应的设置,例如打开文件、分配内存等。
3. 设备关闭函数设备关闭函数在设备被用户程序关闭时被调用,它负责释放设备所占用的资源,如释放文件占用的内存、关闭文件等。
4. 设备读写函数设备读写函数是设备驱动程序的核心部分,它负责设备与用户程序之间的数据交换。
设备读函数用于从设备中读取数据,设备写函数用于向设备中写入数据。
三、设备驱动程序的编写步骤编写设备驱动程序需要经过以下几个步骤:1. 了解硬件设备在编写设备驱动程序之前,我们需要详细了解硬件设备的规格和特性,包括硬件寄存器的地址、中断向量等。
Linux设备驱动程序原理及框架-内核模块入门篇
Linux设备驱动程序原理及框架-内核模块入门篇内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块内核模块介绍Linux采用的是整体式的内核结构,这种结构采用的是整体式的内核结构,采用的是整体式的内核结构的内核一般不能动态的增加新的功能。
为此,的内核一般不能动态的增加新的功能。
为此,Linux提供了一种全新的机制,叫(可安装) 提供了一种全新的机制,可安装) 提供了一种全新的机制模块” )。
利用这个机制“模块”(module)。
利用这个机制,可以)。
利用这个机制,根据需要,根据需要,在不必对内核重新编译链接的条件将可安装模块动态的插入运行中的内核,下,将可安装模块动态的插入运行中的内核,成为内核的一个有机组成部分;成为内核的一个有机组成部分;或者从内核移走已经安装的模块。
正是这种机制,走已经安装的模块。
正是这种机制,使得内核的内存映像保持最小,的内存映像保持最小,但却具有很大的灵活性和可扩充性。
和可扩充性。
内核模块内核模块介绍可安装模块是可以在系统运行时动态地安装和卸载的内核软件。
严格来说,卸载的内核软件。
严格来说,这种软件的作用并不限于设备驱动,并不限于设备驱动,例如有些文件系统就是以可安装模块的形式实现的。
但是,另一方面,可安装模块的形式实现的。
但是,另一方面,它主要用来实现设备驱动程序或者与设备驱动密切相关的部分(如文件系统等)。
密切相关的部分(如文件系统等)。
课程内容内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块应用层加载模块操作过程内核引导的过程中,会识别出所有已经安装的硬件设备,内核引导的过程中,会识别出所有已经安装的硬件设备,并且创建好该系统中的硬件设备的列表树:文件系统。
且创建好该系统中的硬件设备的列表树:/sys 文件系统。
(udev 服务就是通过读取该文件系统内容来创建必要的设备文件的。
)。
Windows驱动开发入门
接触windows驱动开发有一个月了,感觉Windows驱动编程并不像传说中的那么神秘。
为了更好地为以后的学习打下基础,记录下来这些学习心得,也为像跟我一样致力于驱动开发却苦于没有门路的菜鸟朋友们抛个砖,引个玉。
我的开发环境:Windows xp 主机+ VMW ARE虚拟机(windows 2003 server系统)。
编译环境:WinDDK6001.18002。
代码编辑工具:SourceInsight。
IDE:VS2005/VC6.0。
调试工具:WinDBG,DbgView.exe, SRVINSTW.EXE上面所有工具均来自互联网。
对于初学者,DbgView.exe和SRVINSTW.EXE是非常简单有用的两个工具,一定要装上。
前者用于查看日志信息,后者用于加载驱动。
下面从最简单的helloworld说起吧。
Follow me。
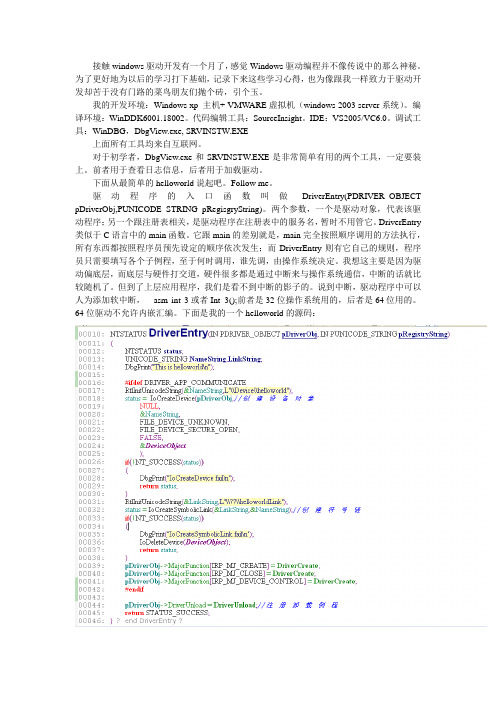
驱动程序的入口函数叫做DriverEntry(PDRIVER_OBJECT pDriverObj,PUNICODE_STRING pRegisgryString)。
两个参数,一个是驱动对象,代表该驱动程序;另一个跟注册表相关,是驱动程序在注册表中的服务名,暂时不用管它。
DriverEntry 类似于C语言中的main函数。
它跟main的差别就是,main完全按照顺序调用的方法执行,所有东西都按照程序员预先设定的顺序依次发生;而DriverEntry则有它自己的规则,程序员只需要填写各个子例程,至于何时调用,谁先调,由操作系统决定。
我想这主要是因为驱动偏底层,而底层与硬件打交道,硬件很多都是通过中断来与操作系统通信,中断的话就比较随机了。
但到了上层应用程序,我们是看不到中断的影子的。
说到中断,驱动程序中可以人为添加软中断,__asm int 3或者Int_3();前者是32位操作系统用的,后者是64位用的。
64位驱动不允许内嵌汇编。
下面是我的一个helloworld的源码:注意第16行的宏。
伺服驱动器快速入门指南

伺服驱动器快速入门指南版权声明固高伺创动技术(深圳)有限公司保留所有权力固高伺创动技术(深圳)有限公司(以下简称固高伺创)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权力。
固高伺创不承担由于使用本手册或本产品不当,所造成直接的、间接的、特殊的、附带的或相应产生的损失或责任。
固高伺创具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
联系我们固高伺创动技术(深圳)有限公司地址:深圳市高新技术产业园南区深港产学研基地西座二楼W201室电话:0755-********传真:0755-********电子邮件:huang.yue@文档版本安全性须知1、安全性概要只有合格人员才能进行安装。
不要求您是一位安装和操作驱动系统的运动控制专家。
但是,您必须对电子、计算机、机械和安全防护有一个基本了解。
GTHD 内有危险电压。
务必确认驱动器正确接地。
在安装GTHD 之前,仔细阅读本产品相关文档中的安全说明。
不遵守安全操作指南可能导致人身伤害或设备损坏。
2、安全标识安全标识指示,如果不遵循建议的预防措施和安全操作方法,可能会造成人身伤害或设备损坏。
下面是本手册和驱动器上使用的安全标识:3、安全说明•在装配和调试之前,请详细阅读产品说明书。
不正确地使用本产品可能会导致人身伤害或设备损坏。
务必严格遵守安装说明和要求。
•各系统组件必须接地。
通过低阻抗的接地来保证电气安全(根据EN/IEC 618005-1标准,保护等级1)。
电机应通过独立的接地导体连接至保护地,其接地导体的规格不可低于电机动力电缆的规格。
本产品内有对静电敏感的元件,不正确的放置会损坏这些元件,请避免本产品接触到高绝缘材料(如人造纤维、塑料薄膜等等),应将其置于导电表面。
操作人员通过触碰接地的无漆金属表面释放一切可能产生的静电。
•操作期间,请勿打开外壳及电气柜柜门。
否则,潜在的危险可能导致人身伤害或设备损坏。
电脑驱动程序是什么
电脑驱动程序是什么电脑已经走入我们的生活,电脑学习是一个漫长的过程,今天小编为大家科普电脑入门知识,一起来店铺。
1 驱动程序是什么驱动程序的概念,驱动程序实际上是一段能让电脑与各种硬件设备通话的程序代码。
如果一个硬件只依赖操作系统而没有驱动程序,这个硬件就不能发挥其特有的功效。
换言之,驱动程序是硬件和操作系统之间的一座桥梁,由它把硬件本身的功能告诉给操作系统,同时也将标准的操作系统指令转化成特殊的外设专用命令,从而保证硬件设备的正常工作。
驱动程序也有多种模式,比较熟悉的是微软的Win32驱动模式,无论使用的是Windows 9x系列,还是Windows XP/2000操作系统,同样的硬件只需安装其相应的驱动程序就可以用了。
我们常见到For 9x或For NT/2000等驱动程序,由于这两种操作系统的内核是不一样的,需要针对Windows酌不同版本进行修改。
而无须根据不同的操作系统重新编写驱动,这就给厂家和用户带来了极大的方便。
有时候在找到某个硬件型号的驱动程序后,会出现VxD和WDM 两种驱动。
其中,VxD驱动是一款虚拟驱动程序,类似于DOS下的驱动程序,如果你使用的是Windows 9x系统,使用VxD 驱动程序会发挥出硬件的最佳性能;而WDM驱动则是支持更多的新设备,可以增强系统性能和稳定性,在Windows XP/2000操作系统中只支持WDM驱动。
以上内容那个是解答驱动程序是什么的问题,下面接着讲如何下载驱动程序,驱动程序怎么安装的具体方法。
2 为什么安装驱动程序虽然Windows XP/7系统能够识别一些硬件设备,并为其自动安装驱动程序。
但是默认的驱动程序一般不能完全发挥硬件的最佳功能,这时就需要安装生产厂商提供的驱动程序。
另外,有些硬件设备Windows XP/7系统无法识别,就无法自动安装其需要的驱动程序,这些都需要用户安装设备驱动程序。
如图15-1所示为无法识别被打上黄色感叹号的硬件设备。
菜鸟驱动开篇

77. RtlInitUnicodeString(&ustrLinkName, LINK_NAME);
78.
79.
80. status = IoCreateSymbolicLink(&ustrLinkName, &ustrDevName);
81. //创建符号连接
33.
34. pDrvObject->MajorFunction[IRP_MJ_CLOSE] = DispatchClose;
35.
36. pDrvObject->MajorFunction[IRP_MJ_DEVICE_CONTROL] = DispatchIoctl;//指明IRP由那些分发函数处理
三、驱动入门
●驱动分类
常见的Windows 驱动程序是可以分成两类的:一类是不支持即插即用功能的
NT 式驱动程序,另一类是支持即插即用的WDM 式驱动程序。
NT 式驱动的安装是基于服务的,可以通过修改注册表进行,也可以直接通过服务函数
如CreateService 进行安装;但WDM 式驱动不同,它安装的时候需要通过编写一个inf 文件进行控制。
22. UNICODE_STRING ustrLinkName;//驱动设备名称,宏定义
23.
24. UNICODE_STRING ustrDevName; //驱动符号连接 ,宏定义
25.
26. PDEVICE_OBJECT pDevObject;
27.
105.
106. UNICODE_STRING strLink;
107.
108. RtlInitUnicodeString(&strLink, LINK_NAME);
硬件驱动软件入门教程

硬件驱动软件入门教程第一章:硬件驱动概述硬件驱动是指将计算机系统与各种外部硬件设备进行连接和通信的软件程序。
它是操作系统的一部分,通过提供硬件设备所需的底层接口和功能来使硬件设备能够正常运行。
本章将介绍硬件驱动的基本概念、作用和分类。
1.1 硬件驱动的定义硬件驱动是计算机系统中用于操控和管理硬件设备的软件程序,它与硬件设备之间通过特定的接口和协议进行通信和交互。
1.2 硬件驱动的作用硬件驱动的主要作用是提供一个接口,使操作系统能够与硬件设备进行交互。
通过硬件驱动,操作系统可以控制硬件设备的运行状态、读写数据以及进行各种操作。
1.3 硬件驱动的分类硬件驱动按照不同的硬件设备进行分类,可以分为显示器驱动、声卡驱动、网络适配器驱动等。
每种硬件设备都需要相应的硬件驱动才能与操作系统进行通信。
第二章:硬件驱动的加载和配置硬件驱动的加载和配置是硬件驱动程序在操作系统中的安装和初始化过程。
本章将介绍硬件驱动的加载流程和配置方法。
2.1 硬件驱动的加载流程硬件驱动的加载是指将硬件驱动程序加载到操作系统中,并让操作系统能够调用和执行硬件驱动。
硬件驱动的加载流程一般包括初始化、注册、请求资源等步骤。
2.2 硬件驱动的配置方法硬件驱动的配置是指通过参数设置和配置文件等方式对硬件驱动进行初始化和定制。
硬件驱动的配置方法根据不同的驱动程序和硬件设备会有所差异,一般包括设备管理器、注册表编辑器等工具。
第三章:硬件驱动开发与调试硬件驱动的开发与调试是指根据硬件设备的特性和文档编写相应的驱动程序,并通过调试工具对驱动程序进行调试和修复。
本章将介绍硬件驱动开发的基本流程和调试方法。
3.1 硬件驱动开发流程硬件驱动开发的流程包括需求分析、设计、编码和测试等阶段。
在开发过程中,需要了解硬件设备的工作原理和通信协议,并根据操作系统的要求编写相应的驱动程序。
3.2 硬件驱动调试方法硬件驱动的调试是指通过调试工具对驱动程序进行代码级的调试和分析。
驱动入门知识

驱动入门知识设备驱动简介:内核功能划分:1、进程管理进程管理功能负责创建销毁进程,并处理他们与外界之间的连接(输入输出)。
不同进程之间的通信是整个系统的基本功能。
2、内存管理内核在有限的可用资源之上为每个进程都创建了一个虚拟的得知空间,内核的不同部分在和内存管理子系统法交互的时候使用一组函数调用,包括简单的malloc/free函数3、文件系统Unix中的每个对象几乎都可以当作文件来看待。
内核在没有结构的硬件上构造结构化的文件系统4、设备控制几乎每一个系统操作最终都会映射到物理设备上。
除了处理器、内存以及其他很有限的几个对象外,所有设备操作都由相关的代码来完成,这段代码就叫做驱动程序内核必须为系统中的每件外设嵌入相应的驱动程序5、网络功能大部分网络操作和具体的进程无关,数据包的传入是异步事件。
在某个进程处理这些数据包之前,必须收集标识和分发这些数据包系统负责在应用程序和网络接口之间传递数据包。
设备和模块的分类:字符设备:块设备:网络接口:模块:首先是模块,内核的驱动分为两种形式,一种是直接编译进内核,另一种是写成模块,这样在需要的时候可以装载,不需要的时候就可以接卸,所以要了解驱动首先从模块入手。
在我们学习编程的时候,第一个写的程序基本上都是hello_word。
所以,我们现在也写一个hello_word模块。
// Hello_word.c#include <linux/init.h>#include <linux/kernel.h>#include <linux/module.h>static int hello_init(void){printk(KERN_ALERT "Module init: Hello word!\n");return 0;}static void hello_exit(void){printk(KERN_ALERT "Module exit: bye-bye\n");return;}module_init(hello_init);module_exit(hello_exit);对应的用来编译hello_word的makefile文件// Makefileobj-m:=hw_module.ohw_modulemodule-objs:=moduleKDIR := /lib/modules/3.5.0-57-generic/buildMAKE:=makedefault:$(MAKE) -C $(KDIR) SUBDIRS=$(PWD) modulesclean:$(MAKE) -C $(KDIR) SUBDIRS=$(PWD) clean这样一个简单的模块就完成了,这里的程序写法、调用与用户空间的程序有很多不同。
设备驱动程序快速入门

研华DAS卡快速测试指南1) PCI系列(以PCI-1712为例,其他型号的PCI板卡安装过程基本类似,只是型号显示有所不同):PCI系列板卡需要先安装驱动程序,然后关机插卡重起,会出现找到新硬件向导:选择下一步,显示安装设备驱动程序对话框,选择“显示已知设备……(D)”选择下一步,出现“选择设备驱动程序”对话框选择下一步,出现“开始设备驱动程序安装”对话框选择下一步,“完成找到硬件向导”,“完成”设备安装这时在Device Manger中就可以看到PCI-1712:同时在设备管理器中也可以看到安装得PCI-1712卡:2)PCL系列(以PCL-818HD为例, 其他型号的PCL板卡安装过程基本类似,只是型号显示有所不同):正确安装了设备驱动程序之后,关机->插卡->开机,使用Device Manager工具来添加板卡并进行简单的测试,这里以PCL-818HD为例。
1)打开Device Manager工具可以看到正确的安装了PCL-818HD的驱动程序之后,可以看到在Supported Device下面的列表框中,Advantech PCL-818L/H/HD/HG已经处于可用状态(前面没有了红色差号——警示号)2)选中Advantech PCL-818L/H/HD/HG后,右边的Add按钮呈可用状态,单击Add按钮弹出如下的设置对话框:Board Type:选择安装的板卡类型,这里计算机上安装的是PCL-818HD;Base Address:基地址,该值必须为系统空闲地址且与板卡上面的拨码开关所设置相同;Interrupt Channel:中断设置,该值必须为系统空闲中断号且与板卡上面的设置相同;A/D Channels Configuration:通道配置,选择输入的类型,8路差分/16路单端,这里也必须和板卡上面的跳线或开关的设置一致;Clock Selection:时钟选择;DMA Selection:DMA通道选择;D/A V oltage Ref.-Channel1:通道参考电压选择;Options 按钮:可以选择连接扩展板,扩展输入通道。
一文入门usb设备的驱动编写方法

一文入门usb设备的驱动编写方法USB设备驱动编写入门USB(通用串行总线)是一种广泛使用的协议,用于在计算机和外围设备之间建立通信渠道。
编写USB设备驱动程序需要对USB规范以及操作系统提供的底层机制有深入的理解。
1. 理解USB规范USB规范定义了设备之间的通信协议、设备类型和描述符格式等方面。
理解规范对于编写符合标准且能够与其他USB设备交互的驱动程序至关重要。
2. 选择操作系统平台不同操作系统对USB设备驱动程序的要求有所不同。
为Windows环境编写驱动程序与为Linux或macOS编写驱动程序具有不同的方法。
了解目标操作系统的特定要求至关重要。
3. 设置开发环境设置开发环境包括安装必要的工具和库。
这可能需要安装USB 开发工具包或编译器。
阅读操作系统的文档以设置正确的环境。
4. 创建USB描述符USB描述符是描述设备功能和配置的数据结构。
驱动程序需要创建这些描述符才能注册设备并向操作系统公开其功能。
5. 实现USB端点USB端点是设备与计算机之间的数据传输通道。
驱动程序需要实现端点处理程序来处理数据传输和控制请求。
6. 处理USB事件驱动程序需要处理各种USB事件,例如设备插入、拔出和配置更改。
实现事件处理程序来响应这些事件并更新设备状态。
7. 使用USB堆栈操作系统提供USB堆栈,为驱动程序提供与底层USB硬件接口的抽象层。
了解USB堆栈的API和功能对于与硬件交互至关重要。
8. 调试驱动程序调试USB设备驱动程序需要专门的工具和技术。
使用调试器、日志记录和分析工具来识别并解决问题。
9. 测试驱动程序在不同环境和条件下全面测试驱动程序至关重要。
执行功能测试、兼容性测试和压力测试以验证驱动程序的可靠性和稳定性。
10. 提交并分发驱动程序开发完成后,需要向操作系统供应商提交驱动程序以进行认证和分发。
遵守供应商的准则并提供必要的文档。
windows驱动开发入门

主要应用场合
➢安全软件 ➢硬件驱动 ➢各种底层相关,特殊功能的软件
需要掌握的基础知识
➢汇编语言 ➢C语言 ➢Windows操作系统知识 ➢硬件相关知识
Windows驱动开发入门
Windows驱动简介 几个典型的Windows驱动 一个简单的Windows驱动例子 Windows驱动的开发、编译和调试 寒江独钓中的例子浅析 驱动编程中的注意点
键盘硬件
特定功能的实现
➢保护用户输入信息
在用户输入敏感信息时,从底层接管键盘输入,绕过任何之前的黑客程序, 将键盘输入直接交给用户处理。
➢更改按键功能
监视所有按键操作,在用户使用特定按键时调用特定功能。
➢可编程键盘
监视所有按键操作,遇到被编程按键后根据编程信息将此按键输入转为其它 按键或多个按键组合
➢WinDbg的设置
"C:\Program Files\Debugging Tools for Windows\windbg.exe" -k com:port=\\.\pipe\com_1,baud=115200,pipe
Windows驱动开发入门
Windows驱动简介 几个典型的Windows驱动 一个简单的Windows驱动例子 Windows驱动的开发、编译和调试 寒江独钓中的例子浅析 驱动编程中的注意点
WDK
➢获取WDK(免费)
/whdc/DevTools/WDK/WDKpkg.mspx
➢安装WDK ➢WDK相关文档
WDK编译环境
➢各种Windows版本 ➢Check build和Release build ➢Source和makefile文件 ➢命令行编译
SANMOTION RS1 伺服驱动器软件使用快速入门

绝对值编码器清零
点击Test 点击Test Run and 选择Absolute Adjustment 选择Absolute Encoder Clear
点击“OK” 点击“OK”完成清零
编码器电缆
电机型号: 例如 电机型号: R2AA06040FX P 00M 驱动器
CN2 13pin 14pin 1pin 2pin 9pin 10pin 11pin 12pin 17pin 18pin 19pin 20pin
系统默认主轴数: 3. 系统默认主轴数:#1 (选择所需的主轴数) 选择所需的主轴数)
点击”OK” ”OK”完成设置 4. 点击”OK”完成设置
连接驱动器-2
点击Communication,选择Offline 点击Communication,选择Offline - > Online Communication
更改马达参数前必须关闭电源
系统参数设置-1
点击Parameter 选择System 点击Parameter 选择System Parameter Setting 修改参数设置时,双击每行后从下拉框或者固定值中选择需要的值。 修改参数设置时,双击每行后从下拉框或者固定值中选择需要的值。
If necessary.
点击“Close” 点击“Close”键
马达运行
点击“Exit” “ 0” 选择“Group 0”
点击“ 选择General 点击“Parameter ”选择General Parameter Setting 双击此行
更改响应值 设定值越大, 设定值越大,应答性就越高
系统参数设置-2
选择类型
双击每行
设定参数值
保存参数设置的方法与马达 参数设置同
驱动学习1:第一个驱动入门

驱动学习1:第⼀个驱动⼊门Linux驱动程序,⾸先应该知道它是linux的内核模块。
Linux内核模块是使得复杂⽽庞⼤的linux内核条理清晰、可裁剪、⾼兼容性的重要特性。
Linux内核模块的特点:1,模块本⾝不被编译进内核镜像,能够控制内核的⼤⼩。
2,模块可以在需要的时候中被动态加载,⼀旦加载完成就和内核其它部分完全⼀样。
下⾯便是linux内核模块的helloworld程序,结构⼗分固定。
(1) 模块加载函数当通过insmod或者modprobe命令加载内核模块时,模块的加载函数会⾃动执⾏,完成本模块的相关初始化⼯作(2) 模块卸载函数当通过rmmod命令卸载内核模块时,模块的卸载函数会⾃动执⾏,完成本模块的卸载功能(3) 模块许可证声明如果不声明LICENSE,模块被加载时,将收到内核被污染(Kernel Tainted)的警告。
(4) 模块参数(可选)模块参数是模块被加载的时候可以传递给它的值,它本⾝对应模块内部的全部变量(5) 模块导出符号(可选)内核模块可以导出的符号(symbol,对应函数或变量),若导出,则其他模块可以使⽤本模块中的变量或函数(6) 模块作者等信息声明(可选)这个驱动并不具有任何控制硬件的⾏为,只是为了展⽰linux驱动的通⽤结构。
这⼏乎是所有驱动程序的通⽤模版,如led的驱动程序,只需要在hello_ioctl函数中根据不同的传⼊参数操作gpio寄存器即可。
(应⽤层没有操作硬件的权限,⽽内核中具有所有权限。
驱动程序的作⽤就是⾼效的、封装的、有限的向应⽤层提供服务)代码:1/*2hello.c - The simplest kernel module.3*/4 #include <linux/kernel.h>5 #include <linux/init.h>6 #include <linux/module.h>7 #include <linux/slab.h>8 #include <linux/io.h>9 #include <linux/interrupt.h>1011 #include <linux/of_address.h>12 #include <linux/of_device.h>13 #include <linux/of_platform.h>1415/* Standard module information */16 MODULE_LICENSE("GPL");17 MODULE_AUTHOR("pp.");18 MODULE_DESCRIPTION("hello module template ");1920#define DRIVER_NAME "hello"2122 unsigned myint = 0xdeadbeef;23char *mystr = "default";2425 module_param(myint, int, S_IRUGO);26 module_param(mystr, charp, S_IRUGO);2728static int __init hello_init(void)29 {30 printk(KERN_INFO "Hello module world.\n");31 printk(KERN_INFO "Module parameters were (0x%08x) and \"%s\"\n", myint,mystr);3233return0;34 }353637static void __exit hello_exit(void)38 {39 printk(KERN_ALERT "Goodbye module world.\n");40 }4142 module_init(hello_init);43 module_exit(hello_exit);编译后⽣成.ko⽂件,移植到开发板linux下测试默认情况下root@plnx_arm:/mnt# insmod hello.koHello module world.Module parameters were (0xdeadbeef) and "default"root@plnx_arm:/mnt# lsmodTainted: Ghello 8170 - Live 0xbf004000 (O)root@plnx_arm:/mnt# rmmod helloGoodbye module world.传⼊参数时:root@plnx_arm:/mnt# insmod hello.ko myint=123 mystr="pp"Hello module world.Module parameters were (0x0000007b) and "pp"root@plnx_arm:/mnt# rmmod helloGoodbye module world.通过其他的查询命令可以看到内核的输出:root@plnx_arm:/mnt# ls /sys/module/hello/parameters/myint mystrroot@plnx_arm:/mnt# tail -n 2 /var/log/messagesJun 409:56:33 plnx_arm kernel: Hello module world.Jun 409:56:33 plnx_arm kernel: Module parameters were (0x0000007b) and "pp"在Linux下可以通过两种⽅式加载驱动程序:静态加载和动态加载。
2024西门子S120驱动器入门教程CU320

西门子S120驱动器入门教程CU320•驱动器简介与基本概念•硬件安装与接线指导•软件配置与参数设置详解•运动控制功能实现目•维护与保养建议•总结与展望录01驱动器简介与基本概念它提供了广泛的功率范围和模块化设计,可灵活适应不同的机械和控制需求。
S120驱动器采用了先进的控制算法,确保了精确、快速和稳定的运动控制。
西门子S120是一款高性能的驱动器,专为满足现代工业应用而设计。
西门子S120驱动器概述CU320是S120驱动器的控制单元,负责驱动器的控制和通信任务。
它具有强大的处理能力和丰富的接口,可连接多种编码器和传感器。
CU320还支持多种控制模式,包括速度控制、位置控制和力矩控制等。
CU320控制单元特点西门子S120驱动器广泛应用于机械制造、印刷、包装、纺织等领域。
其主要优势在于高精度控制、快速响应、高可靠性和易于维护等方面。
此外,S120驱动器还支持多种现场总线协议,方便与上位机或PLC进行通信。
应用领域及优势分析驱动器控制单元编码器传感器相关术语解释一种电力电子设备,用于控制电机的速度、位置和力矩等参数。
一种测量装置,用于检测电机的位置和速度等参数。
驱动器的核心部件,负责处理控制信号和通信任务。
一种检测装置,用于检测电机的电流、电压、温度等状态参数。
02硬件安装与接线指导西门子S120驱动器CU320外观紧凑,结构坚固,适应各种工业环境。
接口丰富,包括电源接口、编码器接口、通讯接口等,满足各种连接需求。
驱动器面板上配有LED显示屏和按键,方便用户进行参数设置和故障诊断。
驱动器外观及接口介绍电源连接注意事项确保电源电压与驱动器额定电压相匹配,避免过压或欠压对驱动器造成损坏。
电源线应使用符合规格的电缆,并确保接线牢固、可靠。
对于大功率驱动器,应考虑电源线的线径和长度,以减小压降和温升。
编码器电缆连接方法01编码器电缆应使用屏蔽电缆,以减小电磁干扰对编码器信号的影响。
02电缆长度不宜过长,一般不超过50米,以减小信号衰减和干扰。
KX驱动初步使用教程

最近新买了声创新A4 SB0610的声卡。
但由于本人对声卡研究极少,故而无法识别真假,但用着还是没什么问题,就当这块声卡是我接触声卡的入门卡吧,活活~~~~网上好多朋友都喜欢唱歌,本人也很喜欢唱歌,但买这块声卡的主要目的还是为了我唯一的爱好---吉他录音,板载声卡的延迟很大,且操作多有不便,还是独立声卡来得实在!在学习过程中发现好多用创新声卡的朋友都为KX驱动而头疼,收费调试的效果很不错,但只能死板的使用一种连线图,还是不如自己会用来得方便!既然KX驱动的开发者与KX驱动插件的编写者都可以共享他们的成果,让广大网友免费使用,所以我在此也特地制作了本入门教程,本人也是一个头次接触的菜鸟,所以并不能很好的发挥KX的性能,但如果仔细阅读本文还是会让一些什么也不懂的朋友可以达到简单调试KX驱动,不至于一头雾水,出了毛病就只能呼救。
头一次接触声卡,忽然发现创新声卡的原装驱动有好多的问题和不尽如人意的地方,虽然它的EAX音效很强大,但我也只能挥泪舍弃,改用KX,听说有很多人在下载KX之后会中毒,于是我搜索好久,再三考虑还是下载了最新版本的KX3550驱动程序,及附件,网址是/blog/#m=0网友好歹不坏的网易博客,虽然素不相识,但我还是在他这里学到了不少关于KX驱动的知识,在此感谢一下!初接触KX,安装过程就不说了,这个网上有很多教程的,安装主程序--运行库支持--注册插件等等一系统程序下来之后,当我打开KX驱动的数字信号处理器后完全傻眼了,这都是什么东东啊= =!!!眼花@@~~~~! 经本人1天时间的摸索与实践,终于感觉入门了,自已连了一套连线图,基本效果应该都有了,但有待细化,相信只要入门了以后,在以后的不断应用与改动中就会慢慢越来越熟练了!活活~~~好了,话不多说,下面进入正题··········首先要想弄明白KX驱动,大家必须要知道的一件事就是MX6或者MX8的内部构造,和操作方法,具体文字不多说,上图!需要说明的是,八竖条通道灯与推子,分别对应右面的四个输出口,比如第一竖条的三个推子与上面两个灯分就是左边第一个输入通道对应的右面的四个输出口,可以分别控制。
如何编写驱动程序
如何编写驱动程序编写驱动程序是一项相对复杂的任务,它与硬件交互并与操作系统进行通信。
在这篇文章中,我将提供一个简要的指南,帮助您了解如何编写驱动程序。
驱动程序是操作系统的一部分,用于管理和控制硬件设备。
它们允许操作系统与硬件交互,并提供硬件访问的接口。
驱动程序不仅仅是通过读写硬件寄存器来实现的,还需要处理中断请求、DMA、内存映射和其他底层硬件访问。
以下是编写驱动程序的一般步骤:1.硬件设备的了解:要编写一个驱动程序,首先需要了解所要驱动的硬件设备的工作原理和规范。
这包括它的寄存器布局、通信方式、中断请求等。
也可以查找相关的文档和参考资料。
2.操作系统的了解:每个操作系统都有自己的驱动程序开发框架和API。
要编写驱动程序,必须熟悉所使用的操作系统。
这包括操作系统的内核机制、设备管理、中断处理程序和设备驱动接口等。
3.驱动程序的架构设计:在开始编写驱动程序之前,需要设计一个驱动程序的架构。
这包括确定驱动程序的基本功能、组织结构和接口。
在这一阶段,可以考虑使用合适的设计模式,如观察者模式或策略模式。
4.编写设备初始化代码:设备初始化代码负责初始化硬件设备并确保它在操作系统中正确识别和配置。
这通常包括读写设备寄存器、设置中断请求、设置DMA等。
5.编写设备访问代码:设备访问代码负责实现驱动程序的主要功能,如读写数据、处理中断请求并与操作系统进行通信。
这可能涉及到编写ISR(中断服务例程)处理中断,实现设备驱动接口等。
6.进行驱动程序测试:在编写完驱动程序之后,应该对其进行测试以确保其正确性和稳定性。
可以编写一些测试用例来验证驱动程序是否按预期工作。
7.驱动程序的部署和调试:一旦驱动程序测试通过,就可以将其部署到操作系统中。
在部署过程中,可能需要进行一些调试和优化,以确保驱动程序的性能和可靠性。
可以使用调试工具来帮助定位和修复错误。
编写驱动程序需要一定的硬件和软件知识,并且需要耐心和细心来处理底层问题。
NI-DAQ快速入门指南
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
什么是驱动程序?为术语“驱动程序”给出单一的准确定义比较困难。
就最基本的意义而言,驱动程序是一个软件组件,可让操作系统和设备彼此通信。
例如,假设应用程序需要从设备中读取某些数据。
应用程序会调用由操作系统实现的函数,操作系统会调用由驱动程序实现的函数。
驱动程序(由设计和制造该设备的同一公司编写)了解如何与设备硬件通信以获取数据。
当驱动程序从设备获取数据后,它会将数据返回到操作系统,操作系统将数据返回至应用程序。
扩大定义到目前为止,我们的说明采用以下几种方式进行简单化:∙并非所有驱动程序都必须由设计该设备的公司编写。
在多种情形下,设备根据已发布的硬件标准来设计。
这表示驱动程序可以由Microsoft 编写,设备设计者无须提供驱动程序。
∙并非所有驱动程序都直接与设备通信。
对于给定的I/O 请求(如从设备读取数据),通常有一些驱动程序(在堆栈中进行分层)参与该请求。
可视化堆栈的传统方式是将第一个参与对象放在顶部,将最后一个参与对象放在底部,如此图所示。
堆栈中的某些驱动程序可能通过将请求从一种格式转换至另一种格式来参与。
这些驱动程序不会与设备直接通信;它们只操纵请求并将请求传递至堆栈下方的驱动程序。
堆栈中直接与设备通信的一个驱动程序称为“函数驱动程序”;执行辅助处理的驱动程序称为“筛选器驱动程序”。
某些筛选器驱动程序遵守并记录有关I/O 请求的信息,但不会主动参与这些请求。
例如,某些筛选器驱动程序充当验证程序以确保堆栈中的其他驱动程序正确处理I/O 请求。
我们可以扩大“驱动程序”的定义,方法是表示驱动程序为遵守或参与操作系统与设备之间通信的任一软件组件。
软件驱动程序我们的扩大定义相当准确,但仍不完整,原因是某些驱动程序与任何硬件设备根本不关联。
例如,假设你需要编写可以访问核心操作系统数据结构的工具,这些结构仅可以由内核模式下运行的代码进行访问。
可以通过将工具拆分成两个组件来执行该操作。
第一个组件在用户模式下运行且提供用户界面。
第二个组件在内核模式下运行且可以访问核心操作系统数据。
在用户模式下运行的组件称为应用程序,在内核模式下运行的组件称为“软件驱动程序”。
软件驱动程序与硬件设备不关联。
有关处理器模式的详细信息,请参阅用户模式和内核模式。
此图说明了与内核模式软件驱动程序通信的用户模式应用程序。
其他说明软件驱动程序始终在内核模式下运行。
编写软件驱动程序的主要原因是获取对仅在内核模式下可用的受保护数据的访问权限。
但是设备驱动程序不会始终需要访问内核模式数据和资源。
因此某些设备驱动程序在用户模式下运行。
有一系列的驱动程序我们尚未提及,“总线驱动程序”。
若要了解总线驱动程序,你需要了解设备节点和设备树。
有关设备树、设备节点以及总线驱动程序的信息,请参阅设备节点和设备堆栈。
到目前为止,我们的说明过度简化了“函数驱动程序”的定义。
我们表示设备的函数驱动程序为堆栈中直接与设备通信的一个驱动程序。
对于直接连接到外围组件互连(PCI) 总线的设备而言,以上为真。
PCI 设备的函数驱动程序获取映射到设备上端口和内存资源的地址。
函数驱动程序通过写入这些地址直接与设备通信。
但是在多种情形下,设备未直接连接到PCI 总线。
相反设备连接到的主机总线适配器连接到PCI 总线。
例如,USB toaster 连接到主机总线适配器(称为USB 主控制器),该适配器连接到PCI 总线。
USB toaster 具有函数驱动程序,USB 主控制器也具有函数驱动程序。
toaster 的函数驱动程序与toaster 间接通信,方法是将请求发送至USB 主控制器的函数驱动程序。
然后,USB 主控制器的函数驱动程序与USB 主控制器硬件直接通信,该硬件与toaster 通信。
是否需要编写驱动程序?0(共1)对本文的评价是有帮助 - 评价此主题Microsoft Windows 包含适用于许多设备类型的内置驱动程序。
如果有适用于你的设备类型的内置驱动程序,则不必自行编写驱动程序。
你的设备可以使用内置的驱动程序。
适用于USB 设备的内置驱动程序如果你的设备属于由USB 设备工作组(DWG) 定义的设备类,则可能已经存在适用于该设备的Windows USB 类驱动程序。
有关详细信息,请参阅支持的USB 设备类的驱动程序。
适用于其他设备的内置驱动程序目前,Microsoft 为以下其他类型的设备提供内置驱动程序:选择驱动程序模型4(共6)对本文的评价是有帮助 - 评价此主题Microsoft Windows 提供了多种驱动程序模型,你可以使用这些模型编写驱动程序。
最佳驱动程序模型的选择策略取决于你计划编写的驱动程序类型。
下文介绍了这些选项:∙设备函数驱动程序∙设备筛选器驱动程序∙软件驱动程序∙文件系统筛选器驱动程序∙文件系统驱动程序有关各种类型驱动程序之间差异的介绍,请参阅什么是驱动程序?和设备节点和设备堆栈。
以下部分说明了如何为每种类型的驱动程序选择模型。
为设备函数驱动程序选择驱动程序模型当你设计一个硬件设备时,首先要考虑的事项之一就是你是否需要编写函数驱动程序。
提出下列问题:是否可以完全避免编写驱动程序?如果必须编写函数驱动程序,则最好使用哪个驱动程序模型?若要回答这些问题,请确定设备的何处可以容纳设备和驱动程序技术中介绍的技术列表。
参阅该特定技术的文档,以确定是否需要编写函数驱动程序以及了解哪些驱动程序模型可供设备使用。
某些个别技术具有微型驱动程序模型。
在微型驱动程序模型中,设备驱动程序由两个部分组成:一个部分处理常规任务,另一部分处理设备特定的任务。
通常,Microsoft 编写通用部分,设备制造商编写设备特定的部分。
设备特定的部分具有多种名称,其中大部分名称都共享前缀“微型”。
以下是微型驱动程序模型中使用的一些名称:∙显示器微型端口驱动程序∙音频微型端口驱动程序∙电池微型类驱动程序∙蓝牙协议驱动程序∙HID 微型驱动程序∙WIA 微型驱动程序∙NDIS 微型端口驱动程序∙存储器微型端口驱动程序∙流微型驱动程序有关微型驱动程序模型的概述,请参阅微型驱动程序和驱动程序对。
并非设备和驱动程序技术中列出的每项技术都有专用的微型驱动程序模型。
特定技术的文档可能会建议你使用内核模式驱动程序框架(KMDF);其他技术的文档可能会建议你使用用户模式驱动程序框架(UMDF)。
关键点是你应从研究特定设备技术的文档开始。
如果你的设备技术具有微型驱动程序模型,则必须使用微型驱动程序模型。
否则就遵循技术特定的文档中有关是使用UMDF、KMDF 还是Windows 驱动程序模型(WDM) 的建议。
为设备筛选器驱动程序选择驱动程序模型一些驱动程序频繁参与单个I/O 请求(如从设备读取数据)。
驱动程序在堆栈中进行分层,并且可视化堆栈的常规方法是将第一个驱动程序放在顶部,将最后一个驱动程序放在底部。
堆栈具有一个函数驱动程序并且还可以具有筛选器驱动程序。
有关函数驱动程序和筛选器驱动程序的介绍,请参阅什么是驱动程序?和设备节点和设备堆栈。
如果你准备为设备编写筛选器驱动程序,则确定设备的何处可以容纳设备和驱动程序技术中介绍的技术列表。
查看特定设备技术的文档是否有关于选择筛选器驱动程序模型的任何指南。
如果设备技术的文档未提供此指南,则首先考虑使用UMDF 作为驱动程序模型。
如果筛选器驱动程序需要访问的数据结构无法通过UMDF 获取,则考虑使用KMDF 作为驱动程序模型。
在极端少见的情形中,驱动程序需要访问的数据结构无法通过KMDF 获取,则使用WDM 作为驱动程序模型。
为软件驱动程序选择驱动程序模型未与设备关联的驱动程序称为“软件驱动程序”。
有关软件驱动程序的介绍,请参阅什么是驱动程序?主题。
软件驱动程序很有用,原因是这些驱动程序可以在内核模式下运行,这样为其提供了受保护操作系统数据的访问权限。
有关处理器模式的信息,请参阅用户模式和内核模式。
有关软件驱动程序,你的两个选项为KMDF 和旧的Windows NT 驱动程序模型。
使用KMDF 和旧的Windows NT 模型,你可以在编写驱动程序时无须考虑即插即用(PnP) 和电源管理。
你可以改为专心于驱动程序的首要任务上。
使用KMDF,你不必考虑PnP 和电源,因为框架会为你处理PnP 和电源。
使用旧的Windows NT 模型,你不必考虑PnP 和电源,原因是旧的驱动程序在与PnP 和电源管理完全无关的环境中运行。
我们的建议是使用KMDF,尤其是当你已熟悉KMDF 时。
如果你希望驱动程序与PnP 和电源管理完全无关,则使用旧的Windows NT 模型。
如果你需要编写注意到电源转换或PnP 事件的软件,则不能使用旧的Windows NT 模型;必须使用KMDF。
注意在极少情形中,你需要编写注意到PnP 或电源事件的软件驱动程序,并且驱动程序需要访问无法通过KMDF 获取的数据,则必须使用WDM。
为文件系统筛选器驱动程序选择驱动程序模型有关为文件系统筛选器驱动程序选择模型的帮助,请参阅“文件系统微过滤驱动程序”和文件系统筛选器驱动程序。
为文件系统驱动程序选择驱动程序模型有关为文件系统驱动程序选择模型的帮助,请参阅文件系统微过滤驱动程序。
相关主题内核模式驱动程序框架用户模式驱动程序框架Windows 兼容硬件开发板此主题尚未评级 - 评价此主题Windows 兼容硬件开发板(比如Intel Sharks Cove)使你能够为硬件组件开发软件和驱动程序,这些组件通常将合并到手机、平板电脑和其他高度集成或嵌入的系统中。
开发板Summer 2014:新的Microsoft 计划将使硬件工程师使用专为特定SoC 环境设计的经济高效的开发板更轻松地开发和验证Windows 驱动程序。
硬件工程师过去在为SoC 平台创建Windows 驱动程序方面一直面临许多挑战。
与具有PCI 插槽和USB 端口的电脑不同,类似平板电脑和贝壳机的SoC 系统使用低功率内部总线,缺少标准连接器、即插即用支持和发现机制。
通常,这些设备受安全启动的保护,而且无法用于开发或测试第三方驱动程序。
这将很快得到改变。
硬件工程师将能够购买现成的开发板,专门用于特定的SoC 环境。
Intel Sharks Cove 板将在2014 年下半年上市的一种板是Intel Sharks Cove 硬件开发板。
Intel Sharks Cove 板将支持设备的驱动程序开发,这些设备使用各种接口,包括:∙GPIO∙I2C∙I2S∙UART∙SDIO∙USB即将提供:关于Intel Sharks Cove 板的其他信息。
获取硬件开发板即将提供:关于如何获取Windows 兼容硬件开发板的信息。
如果你有兴趣了解更多信息,并希望获得有关硬件开发板可用性的通知,请向HardwareDevBoard@发送电子邮件。