MAX7219中文资料-附有程序
MAX7219中文资料
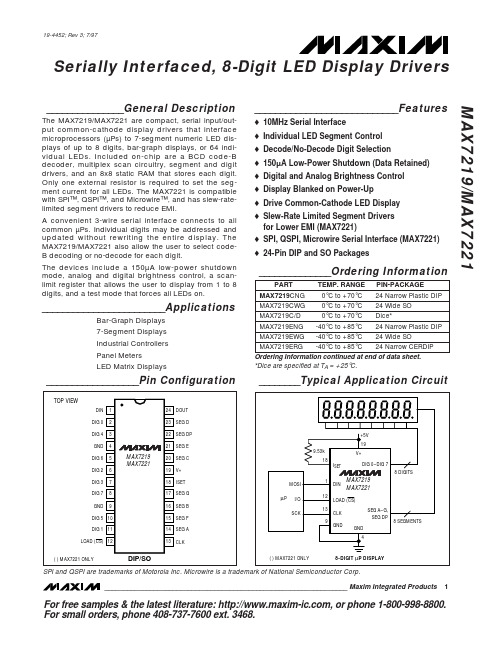
_______________General DescriptionThe MAX7219/MAX7221 are compact, serial input/out-put common-cathode display drivers that interface microprocessors (µPs) to 7-segment numeric LED dis-plays of up to 8 digits, bar-graph displays, or 64 indi-vidual LEDs. Included on-chip are a BCD code-B decoder, multiplex scan circuitry, segment and digit drivers, and an 8x8 static RAM that stores each digit.Only one external resistor is required to set the seg-ment current for all LEDs. The MAX7221 is compatible with SPI™, QSPI™, and Microwire™, and has slew-rate-limited segment drivers to reduce EMI.A convenient 3-wire serial interface connects to all common µPs. Individual digits may be addressed and updated without rewriting the entire display. The MAX7219/MAX7221 also allow the user to select code-B decoding or no-decode for each digit.The devices include a 150µA low-power shutdown mode, analog and digital brightness control, a scan-limit register that allows the user to display from 1 to 8digits, and a test mode that forces all LEDs on.________________________ApplicationsBar-Graph Displays 7-Segment Displays Industrial Controllers Panel Meters LED Matrix Displays____________________________Featureso 10MHz Serial Interfaceo Individual LED Segment Control o Decode/No-Decode Digit Selectiono 150µA Low-Power Shutdown (Data Retained)o Digital and Analog Brightness Control o Display Blanked on Power-Up o Drive Common-Cathode LED Display o Slew-Rate Limited Segment Drivers for Lower EMI (MAX7221)o SPI, QSPI, Microwire Serial Interface (MAX7221)o 24-Pin DIP and SO PackagesMAX7219/MAX7221Serially Interfaced, 8-Digit LED Display Drivers________________________________________________________________Maxim Integrated Products1________Typical Application Circuit__________________Pin Configuration19-4452; Rev 3; 7/97SPI and QSPI are trademarks of Motorola Inc. Microwire is a trademark of National Semiconductor Corp.For free samples & the latest literature: , or phone 1-800-998-8800.For small orders, phone 408-737-7600 ext. 3468.M A X 7219/M A X 72212_______________________________________________________________________________________ABSOLUTE MAXIMUM RATINGSELECTRICAL CHARACTERISTICS(V+ = 5V ±10%, R SET = 9.53k Ω±1%, T A = T MIN to T MAX , unless otherwise noted.)Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.Voltage (with respect to GND)V+............................................................................-0.3V to 6V DIN, CLK, LOAD, CS ...............................................-0.3V to 6V All Other Pins.............................................-0.3V to (V+ + 0.3V)CurrentDIG0–DIG7 Sink Current................................................500mA SEGA–G, DP Source Current.........................................100mA Continuous Power Dissipation (T A = +85°C)Narrow Plastic DIP..........................................................0.87W Wide SO..........................................................................0.76W Narrow CERDIP.................................................................1.1WOperating Temperature RangesMAX7219C_G/MAX7221C_G ..............................0°C to +70°C MAX7219E_G/MAX7221E_G............................-40°C to +85°C Storage Temperature Range.............................-65°C to +160°C Lead Temperature (soldering, 10sec).............................+300°CMAX7219/MAX7221_______________________________________________________________________________________3ELECTRICAL CHARACTERISTICS (continued)(V+ = 5V ±10%, R SET =9.53k Ω±1%, T A = T MIN to T MAX , unless otherwise noted.)M A X 7219/M A X 72214_________________________________________________________________________________________________________________________________Typical Operating Characteristics(V+ = +5V, T A = +25°C, unless otherwise noted.)730750740770760790780800820810830 4.04.44.85.25.66.0SCAN FREQUENCY vs. POSITIVE SUPPLY VOLTAGEM A X 7219/21 01POSITIVE SUPPLY VOLTAGE (V)S C A N F R E Q U E N C Y (H z )20104030605070012345SEGMENT DRIVER OUTPUT CURRENTvs. OUTPUT VOLTAGEOUTPUT VOLTAGE (V)O U T P U T C U R R E N T (m A )MAX7219SEGMENT OUTPUT CURRENTM A X 7219/21 035µs/div10mA/div0MAXIMUM INTENSITY = 31/32MAX7221SEGMENT OUTPUT CURRENTM A X 7219/21 045µs/div10mA/divMAXIMUM INTENSITY = 15/16MAX7219/MAX7221______________________________________________________________Pin Description_________________________________________________________Functional DiagramM A X 7219/M A X 72216______________________________________________________________________________________________________Detailed DescriptionMAX7219/MAX7221 DifferencesThe MAX7219 and MAX7221 are identical except fortwo parameters: the MAX7221 segment drivers are slew-rate limited to reduce electromagnetic interfer-ence (EMI), and its serial interface is fully SPI compati-ble.Serial-Addressing ModesFor the MAX7219, serial data at DIN, sent in 16-bit packets, is shifted into the internal 16-bit shift register with each rising edge of CLK regardless of the state of LOAD. For the MAX7221, CS must be low to clock data in or out. The data is then latched into either the digit or control registers on the rising edge of LOAD/CS .LOAD/CS must go high concurrently with or after the 16th rising clock edge, but before the next rising clock edge or data will be lost. Data at DIN is propagated through the shift register and appears at DOUT 16.5clock cycles later. Data is clocked out on the falling edge of CLK. Data bits are labeled D0–D15 (Table 1).D8–D11 contain the register address. D0–D7 contain the data, and D12–D15 are “don’t care” bits. The first received is D15, the most significant bit (MSB).Digit and Control RegistersTable 2 lists the 14 addressable digit and control regis-ters. The digit registers are realized with an on-chip,8x8 dual-port SRAM. They are addressed directly so that individual digits can be updated and retain data as long as V+ typically exceeds 2V. The control registers consist of decode mode, display intensity, scan limit (number of scanned digits), shutdown, and display test (all LEDs on).Shutdown ModeWhen the MAX7219 is in shutdown mode, the scan oscil-lator is halted, all segment current sources are pulled to ground, and all digit drivers are pulled to V+, thereby blanking the display. The MAX7221 is identical, except the drivers are high-impedance. Data in the digit and control registers remains unaltered. Shutdown can be used to save power or as an alarm to flash the display by successively entering and leaving shutdown mode. For minimum supply current in shutdown mode, logic inputs should be at ground or V+ (CMOS-logic levels).Typically, it takes less than 250µs for the MAX7219/MAX7221 to leave shutdown mode. The display driver can be programmed while in shutdown mode, and shutdown mode can be overridden by the display-test function.Figure 1. Timing DiagramTable 1. Serial-Data Format (16 Bits)Initial Power-UpOn initial power-up, all control registers are reset, the display is blanked, and the MAX7219/MAX7221 enter shutdown mode. Program the display driver prior to display use. Otherwise, it will initially be set to scan one digit, it will not decode data in the data registers, and the intensity register will be set to its minimum value.Decode-Mode RegisterThe decode-mode register sets BCD code B (0-9, E, H,L, P, and -) or no-decode operation for each digit. Each bit in the register corresponds to one digit. A logic high selects code B decoding while logic low bypasses the decoder. Examples of the decode mode control-regis-ter format are shown in Table 4.When the code B decode mode is used, the decoder looks only at the lower nibble of the data in the digit registers (D3–D0), disregarding bits D4–D6. D7, which sets the decimal point (SEG DP), is independent of the decoder and is positive logic (D7 = 1 turns the decimal point on). Table 5 lists the code B font.When no-decode is selected, data bits D7–D0 corre-spond to the segment lines of the MAX7219/MAX7221.Table 6 shows the one-to-one pairing of each data bit to the appropriate segment line.MAX7219/MAX7221Table 3. Shutdown Register Format (Address (Hex) = XC)Table 4. Decode-Mode Register Examples (Address (Hex) = X9)M A X 7219/M A X 7221Intensity Controland Interdigit BlankingThe MAX7219/MAX7221 allow display brightness to be controlled with an external resistor (R SET ) connected between V+ and ISET. The peak current sourced from the segment drivers is nominally 100 times the current entering ISET. This resistor can either be fixed or vari-able to allow brightness adjustment from the front panel. Its minimum value should be 9.53Ω, which typi-cally sets the segment current at 40mA. Display bright-ness can also be controlled digitally by using the intensity register.Digital control of display brightness is provided by an internal pulse-width modulator, which is controlled by the lower nibble of the intensity register. The modulator scales the average segment current in 16 steps from a maximum of 31/32 down to 1/32 of the peak current set by R SET (15/16 to 1/16 on MAX7221). Table 7 lists the intensity register format. The minimum interdigit blank-ing time is set to 1/32 of a cycle.8_______________________________________________________________________________________Table 5. Code B FontTable 6. No-Decode Mode Data Bits and Corresponding Segment Lines*The decimal point is set by bit D7 = 1Scan-Limit RegisterThe scan-limit register sets how many digits are dis-played, from 1 to 8. They are displayed in a multiplexed manner with a typical display scan rate of 800Hz with 8digits displayed. If fewer digits are displayed, the scan rate is 8f OSC /N, where N is the number of digitsscanned. Since the number of scanned digits affects the display brightness, the scan-limit register should not be used to blank portions of the display (such as leading zero suppression). Table 8 lists the scan-limit register format.MAX7219/MAX7221_______________________________________________________________________________________9Table 7. Intensity Register Format (Address (Hex) = XA)Table 8. Scan-Limit Register Format (Address (Hex) = XB)*See Scan-Limit Register section for application.M A X 7219/M A X 7221If the scan-limit register is set for three digits or less,individual digit drivers will dissipate excessive amounts of power. Consequently, the value of the R SET resistor must be adjusted according to the number of digits dis-played, to limit individual digit driver power dissipation.Table 9 lists the number of digits displayed and the corresponding maximum recommended segment cur-rent when the digit drivers are used.Display-Test RegisterThe display-test register operates in two modes: normal and display test. Display-test mode turns all LEDs on by overriding, but not altering, all controls and digit reg-isters (including the shutdown register). In display-test mode, 8 digits are scanned and the duty cycle is 31/32(15/16 for MAX7221). Table 10 lists the display-test reg-ister format.No-Op RegisterThe no-op register is used when cascading MAX7219s or MAX7221s. Connect all devices’ LOAD/CS inputs together and connect DOUT to DIN on adjacent devices. DOUT is a CMOS logic-level output that easily drives DIN of successively cascaded parts. (Refer to the Serial Addressing Modes section for detailed infor-mation on serial input/output timing.) For example, if four MAX7219s are cascaded, then to write to thefourth chip, sent the desired 16-bit word, followed by three no-op codes (hex XX0X, see Table 2). When LOAD/CS goes high, data is latched in all devices. The first three chips receive no-op commands, and the fourth receives the intended data.__________Applications InformationSupply Bypassing and WiringTo minimize power-supply ripple due to the peak digit driver currents, connect a 10µF electrolytic and a 0.1µF ceramic capacitor between V+ and GND as close to the device as possible. The MAX7219/MAX7221 should be placed in close proximity to the LED display, and connections should be kept as short as possible to minimize the effects of wiring inductance and electro-magnetic interference. Also, both GND pins must be connected to ground.Selecting R SET Resistor andUsing External DriversThe current per segment is approximately 100 times the current in ISET. To select R SET , see Table 11. The MAX7219/MAX7221’s maximum recommended seg-ment current is 40mA. For segment current levels above these levels, external digit drivers will be need-ed. In this application, the MAX7219/MAX7221 serve only as controllers for other high-current drivers or tran-sistors. Therefore, to conserve power, use R SET = 47k Ωwhen using external current sources as segment dri-vers.The example in Figure 2 uses the MAX7219/MAX7221’s segment drivers, a MAX394 single-pole double-throw analog switch, and external transistors to drive 2.3”AND2307SLC common-cathode displays. The 5.6V zener diode has been added in series with the decimal point LED because the decimal point LED forward volt-age is typically 4.2V. For all other segments the LED forward voltage is typically 8V. Since external transis-tors are used to sink current (DIG 0 and DIG 1 are used as logic switches), peak segment currents of 45mA are allowed even though only two digits are displayed. In applications where the MAX7219/MAX7221’s digit dri-vers are used to sink current and fewer than four digits are displayed, Table 9 specifies the maximum allow-able segment current. R SET must be selected accord-ingly (Table 11).Refer to the Power Dissipation section of the Absolute Maximum Ratings to calculate acceptable limits for ambient temperature, segment current, and the LED forward-voltage drop.10______________________________________________________________________________________Table 9. Maximum Segment Current for 1-, 2-, or 3-Digit DisplaysTable 10. Display-Test Register Format (Address (Hex) = XF)Note: The MAX7219/MAX7221 remain in display-test mode (all LEDs on) until the display-test register is reconfigured for normal operation.Computing Power DissipationThe upper limit for power dissipation (PD) for the MAX7219/MAX7221 is determined from the following equation:PD = (V + x 8mA) + (V+ - V LED )(DUTY x I SEG x N)where:V+ = supply voltageDUTY = duty cycle set by intensity register N = number of segments driven (worst case is 8)V LED = LED forward voltageI SEG = segment current set by R SET Dissipation Example:I SEG = 40mA, N = 8, DUTY = 31/32, V LED = 1.8V at 40mA, V+ = 5.25V PD = 5.25V(8mA) + (5.25V - 1.8V)(31/32 x 40mA x 8) = 1.11WThus, for a CERDIP package (θJA = +60°C/W from Table 12), the maximum allowed ambient temperature T A is given by:T J(MAX)= T A + PD x θJA + 150°C = T A +1.11W x60°C/Wwhere T A = +83.4°C.Cascading DriversThe example in Figure 3 drives 16 digits using a 3-wire µP interface. If the number of digits is not a multiple of 8, set both drivers’ scan limits registers to the same number so one display will not appear brighter than the other. For example, if 12 digits are need, use 6 digits per display with both scan-limit registers set for 6 digits so that both displays have a 1/6 duty cycle per digit. If 11 digits are needed, set both scan-limit registers for 6digits and leave one digit driver unconnected. If one display for 6 digits and the other for 5 digits, the sec-ond display will appear brighter because its duty cycle per digit will be 1/5 while the first display’s will be 1/6.Refer to the No-Op Register section for additional infor-mation.MAX7219/MAX7221______________________________________________________________________________________11Table 11. R SET vs. Segment Current and LED Forward VoltageTable 12. Package Thermal Resistance DataM A X 7219/M A X 722112______________________________________________________________________________________Figure 2. MAX7219/MAX7221 Driving 2.3-Inch DisplaysMAX7219/MAX7221______________________________________________________________________________________13Figure 3. Cascading MAX7219/MAX7221s to Drive 16 7-Segment LED DigitsM A X 7219/M A X 722114_______________________________________________________________________________________Ordering Information (continued)___________________Chip TopographySEG FSEG ACLK LOAD OR CS DIG 1DIG 5GNDGNDDIG 7DIG 3DIG 2DIG 60.093"(2.36mm)0.080"(2.03mm)SEG B ISET SEG ESEG DP SEG CSEG G DIG 4DIG 0DIN DOUT SEG DTRANSISTOR COUNT: 5267SUBSTRATE CONNECTED TO GNDMAX7219/MAX7221______________________________________________________________________________________15________________________________________________________Package InformationM A X 7219/M A X 7221___________________________________________Package Information (continued)Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.16____________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600©1997 Maxim Integrated ProductsPrinted USAis a registered trademark of Maxim Integrated Products.。
max7219资料及电路图
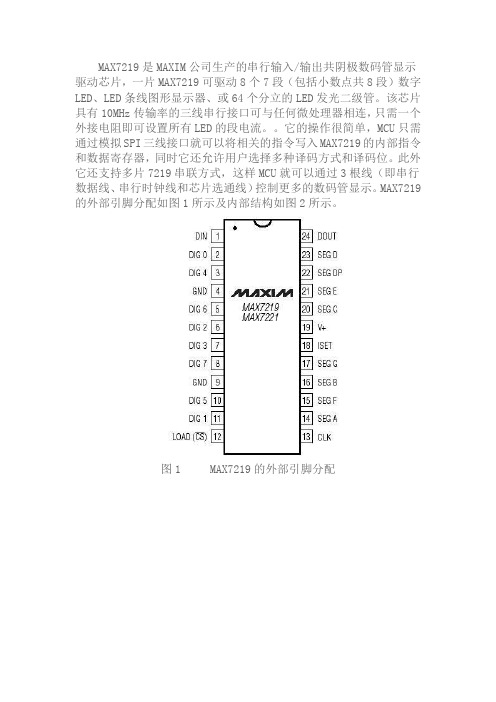
MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。
该芯片具有10MHz传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED的段电流。
它的操作很简单,MCU只需通过模拟SPI三线接口就可以将相关的指令写入MAX7219的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。
此外它还支持多片7219串联方式,这样MCU就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。
MAX7219的外部引脚分配如图1所示及内部结构如图2所示。
图1 MAX7219的外部引脚分配图2 MAX7219的内部引脚分配各引脚的功能为:DIN:串行数据输入端DOUT:串行数据输出端,用于级连扩展LOAD:装载数据输入CLK:串行时钟输入DIG0~DIG7:8位LED位选线,从共阴极LED中吸入电流SEG A~SEG G DP 7段驱动和小数点驱动ISET:通过一个10k电阻和Vcc相连,设置段电流MAX7219有下列几组寄存器:(如图3)MAX7219内部的寄存器如图3,主要有:译码控制寄存器、亮度控制寄存器、扫描界限寄存器、关断模式寄存器、测试控制寄存器。
编程时只有正确操作这些寄存器,MAX7219才可工作。
图 3 MAX7219内部的相关寄存器分别介绍如下:(1)译码控制寄存器(X9H)如图4所示,MAX7219有两种译码方式:B译码方式和不译码方式。
当选择不译码时,8个数据为分别一一对应7个段和小数点位;B译码方式是BCD译码,直接送数据就可以显示。
实际应用中可以按位设置选择B译码或是不译码方式。
图4 MAX7219的译码控制寄存器(2)扫描界限寄存器(XBH)如图5所示,此寄存器用于设置显示的LED的个数(1~8),比如当设置为0xX4时,LED 0~5显示。
点阵屏驱动程序(MAX7219)
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
}
}
void Display_4(uchar dat)
{
uchar i;
{0x00,0x70,0x88,0x80,0x80,0x80,0x88,0x70},//C16
};
//--------------------------------------------
//功能:向MAX7219(U3)写入字节
//入口参数:DATA
//出口参数:无
//说明:
void Write_Max7219_byte(uchar DATA)
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Write_Max7219_byte(0);
Max7219_pinCS=1;
Write_Max7219(0,0); //清除缓冲区数据,消除显示误差
Write_Max7219(7,0);//清除缓冲区数据,消除显示误差
Write_Max7219(8,0);//清除缓冲区数据,消除显示误差
}
/***************************************************/
void Display_1(uchar dat)
{
Write_Max7219_byte(0);
串行LED显示驱动器MAX7219及其应用

串行L ED显示驱动器M AX7219及其应用胡奕明(空军工程大学工程学院研究生大队 西安 710038)摘 要 阐述了新型显示驱动芯片M A X7219的基本工作原理和软件设计方法。
该芯片功能强大、编程简单、控显可靠,可广泛用于工业控制器等方面的数码显示驱动。
关键词 显示驱动器 串行发送 M A X72191 概 述M A X7219是美国M A X I M公司生产的串行输入 输出共阴极显示驱动器。
该芯片可直接驱动最多8位7段数字L ED显示器,或64个L ED和条形图显示器。
它与微处理器的接口非常简单,仅用3个引脚与微处理器相应端连接即可实现最高10M H z 串行接口。
M A X7219的位选方式独具特色,它允许用户选择多种译码方式译码选位,而且,每个显示位都能个别寻址和刷新,而不需要重写其他的显示位,这使得软件编程十分简单且灵活。
另外,它具有数字和模拟亮度控制以及与M O TOROLA SP I, Q SP I及M A T I ONAL M I CROW I R E串行口相兼容等特点。
2 引脚说明该芯片采用24脚D IP和SO封装,工作电压410~515V,最大功耗111W。
引脚说明见表1。
3 基本工作原理及使用方法M A X7219与8031单片机连接采用三线串行接口,典型应用电路如图1。
对于M A X7219,串行数据是以16位数据包的形式从D in脚串行输入,在CL K的每一个上升沿一位一位地送入芯片内部16位移位寄存器,而不管L out脚的状态如何。
L oad脚必须在第16个CL K上升沿出现的同时或之后,但在下一个CL K上升沿之前变为高电平,否则移入的数据将丢失。
表1 引脚说明引脚号名称功能说明1D in串行数据输入端。
在CL K的上升沿数据被锁入芯片内部16位移位寄存器2,3,5~8,10,11D IG0~D IG78位L ED位选线,从共阴极L ED中吸入电流4,9GND地线(两个GND必须接在一起)12L oad锁入输入的数据。
MAX7219单片以及级联驱动程序

MAX7219单片以及级联驱动程序2011-03-20 09:40说明一下:这个word版式是从百度上下载的,在原版中,作者只是写了驱动一片MAX7219的程序。
本人作为菜鸟,第一次使用MAX7219就用了两片级联来驱动15个数码管,按照原版程序驱动一片MAX7219是没有问题的,但是,驱动两片MAX7219就不行了。
自己先认真看了MAX7219的DataSsheet,因为英语是个二把刀,看的迷迷糊糊,似懂非懂(可见英语还是很重要的),又在网上搜索也没发现有正确的程序(都是有点儿问题,上网贴出来请教各位大虾的),没办法只能自力更生了,终于调出来了。
将原版增删修改,传上来共享,希望对以后某位菜鸟第一次使用MAX7219时有所帮助啦,嘿嘿!/**************************************************************** *常用符号定义******************************************************************/#define uchar unsigned char/**************************************************************** *定义MAX7219寄存器******************************************************************/#define REG_NO_OP 0x00 //定义空操作register#define DIG_1 0x01 // 定义数码管1 register#define DIG_2 0x02 // 定义数码管2 register#define DIG_3 0x03 // 定义数码管3 register#define DIG_4 0x04 // 定义数码管4 register#define DIG_5 0x05 // 定义数码管5 register#define DIG_6 0x06 // 定义数码管6 register#define DIG_7 0x07 // 定义数码管7 register#define DIG_8 0x08 // 定义数码管8 register#define REG_DECODE 0x09 // 定义解码控制register#define REG_INTENSITY 0x0a // 定义显示亮度register#define REG_SCAN_LIMIT 0x0b // 定义扫描限制register#define REG_SHUTDOWN 0x0c // 定义"shutdown"模式register#define REG_DISPLAY_TEST 0x0f // 定义"display test"模式register#define INTENSITY_MIN 0x00 // 定义最低显示亮度#define INTENSITY_MAX 0x0f // 定义最高显示亮度/****************************************************************** * 定义硬件引脚连接******************************************************************/#define DATA P2^3; //定义P3_5连接MAX7219 DATA引脚#define CLK P2^5; //定义P3_4连接MAX7219 CLK 引脚#define CS P2^4; //定义P3_3连接MAX7219 CS 引脚/***************************************************************** * 共阴极七段数码管显示对应段查询表(数字0-9分别对应code_table[0]-[9])***********************************************************/uchar code code_table[10]={0x7e,0x30,0x6d,0x79,0x33,0x5b,0x5f,0x70,0x7f,0x7b}; /*采用数组*//****************************************************************** * MAX7219_Send()描述: 向MAX7219传送一字节数据Arguments : dataout = data to sendReturns : none******************************************************************/ void send (uchar datain){char I,temp;for (i=8; i>0; i--){CLK=0; // CLK 置低temp=datain&0x80;if (temp==0x80) // 判断并输出一位DATA=1; // 输出"1"else // 或DATA=0; // 输出"0"datain<<=1; //datain左移位,以便再次与0x80按位与CLK=1; // CLK 置高}}/**************************************************************** * MAX7219_Write()/MAX7219_Write_1()描述: 向 MAX7219 写命令Arguments : reg_number = register to write todataout = data to write to MAX7219Returns : none************************************************************** */ void MAX7219_Write (uchar add1, uchar dat1) //向第一片MAX7219写数据{CS=0; // CS置低选通MAX7219send(add1); // 写register number 到MAX7219send(dat1); // 写data 到MAX7219CS=1; // 利用CS上升沿锁存以上移位进输入的16位数据}void MAX7219_Write_1(uchar add2,uchar dat2) //向第二片MAX7219写数据{CS=0;sent(add2);sent(dat2);CLK=1; // 第16.5个时钟周期,数据从第一片MAX7219的DOUT端开始输出sent(REG_NO_OP); //对第一片MAX7219进行空操作,sent(0x00);CS=1;}/******************************************************************** MAX7219_DisplayChar()描述: 使某一位显示一个数字Arguments : digit = digit number (0-7)character = character to display (0-9, A-Z)Returns : none****************************************************************/void MAX7219_DisplayChar (char digit, char character){MAX7219_Write(digit, character);}PS:这个函数可以不要,直接调用写数据函数就可以了(原版)/******************************************************************** MAX7219_Clear()/MAX7219_clear_1()描述: 清除所有位的显示Arguments : noneReturns : none*****************************************************************/ void MAX7219_Clear (){uchar i;for (i=0; i < 8; i++)MAX7219_Write(i, 0x00); // 清除第一片MAX7219所有位的显示}void MAX7219_Clear_1(){uchar i;for(i=1;i<=8;i++)MAX7219_Write_1(i,0x00); //清除第二片MAX7219所有位的显示}PS:可以两片一起清楚数据,但建议分开较好。
51单片机程序 MAX7219

#define LSB 0x01
//max7219 part
#define DECODE_MODE 0x09
#define INTENSITY 0x0A
#define SCAN_LIMIT 0x0B
#define SHUT_DOWN 0x0C
#define DISPLAY_TEST 0x0F
{
LOAD = LOW;
Write_Max7219_byte(address);
Write_Max7219_byte(dat);
LOAD = HIGH;
}
void Init_Max7219(void) //初始化max7219子函数设置工作寄存器需要查看芯片手册
{
Write_Max7219(SHUT_DOWN,0x01); //Normal Operation XXXXXXX1 Shutdown Mode XXXXXXXX0
Write_Max7219(SCAN_LIMIT,0x07); //SCAN LIMIT 0~7 0xX0~0xX7
Write_Max7219(INTENSITY,0x0f); //Set Intensity 0xX0~0xXf强度调节
}
void main(void)//显示1~8数字
{
unsigned char i;
void delayms(uint z)//延时函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y-Fra bibliotek);}
void Write_Max7219_byte(unsigned char temp)//发送一个字节的子程序,上升沿发送数据
MAX7219中文
四、功能特点z10MHz连续串行口z独立的LED段控制z数字的译码与非译码选择z 150μA的低功耗关闭模式z亮度的数字和模拟控制z高电压中断显示z共阴极LED显示驱动z限制回转电流的段驱动来减少EMI(MAX7221)z SPI, QSPI, MICROWIRE串行接口(MAX7221)z 24脚的DIP和SO封装五、分类信息芯片 工作温度范围 管脚封装 MAX7219CNG 0°C to +70°C 24 Narrow Plastic DIPMAX7219CWG 0°C to +70°C 24 Wide SOMAX7219C/D 0°C to +70°C Dice*MAX7219EWG -40°C to +85°C24 Wide SOMAX7219ERG -40°C to +85°C 24 Narrow CERDIP六、典型应用电路串行数据输入端口。
位寄存器。
八个数据驱动线路置显示器共阴极为低电平。
关闭时7219此管脚输出高电平,7221地线(4九、时序图十、详细描述(一)MAX7219和MAX7221的不同之处MAX7219和MAX7221是相同的除了以下两点:(1):MAX7219的段驱动有回流限制可以减少EMI;(2):MAX7219的串行口和SPI完全兼容。
(二)串行地址格式对MAX7219来说,串行数据在DIN输入16位数据包,无论LOAD端处于何种状态,在时钟的上升沿数据均移入到内部16位移位寄存器。
对MAX7221来说,无论数据输入或输出cs必须为低电平。
然后数据在LOAD/cs的上升沿被载入数据寄存器或控制寄存器。
LOAD/cs端在第16个时钟的上升沿同时或之后,下个时钟上升沿之前变为高电平,否则数据将会丢失。
在DIN端的数据传输到移位寄存器在16.5个时钟周期之后出现在DOUT端。
MAX7219工作原理简介

MAX7219工作原理简介MAX7219是一个采用3线串行接口的8位共阴极7段LED显示驱动器。
本文分析了MAX7219各个寄存器的功能,并结合MAX7219的工作时序,给出了MAX7219在Motorola MC68HC908单片机系统中的一个应用实例。
关键词: MCU;MAX7219;LED Motorola MC68HC908MAX7219工作时序及其寄存器MAX7219是一个高性能的多位LED显示驱动器,可同时驱动8位共阴极LED或64个独立的LED。
其内部结构框图如图1所示,主要包括移位寄存器、控制寄存器、译码器、数位与段驱动器以及亮度调节和多路扫描电路等。
MAX7219 采用串行接口方式,只需LOAD、DIN、CLK三个管脚便可实现数据传送。
DIN管脚上的16位串行数据包不受LOAD状态的影响,在每个CLK的上升沿被移入到内部16位移位寄存器中。
然后,在LOAD的上升沿数据被锁存到数字或控制寄存器中。
LOAD必须在第16个时钟上降沿或之后,但在下一个时钟上升沿之前变高,否则数据将会丢失。
DIN端的数据通过移位寄存器传送,并在16.5个时钟周期后出现在DOUT端,随CLK 的下降沿输出。
MAX7219的操作时序如图2所示。
MAX7219的串行数据标记为D15~D0,其中低8位表示显示数据本身,最高的4位D15~D12未使用,寻址内部寄存器的地址位占用D11~D8,选择14个内部寄存器,见表1。
图1 MAX7219内部结构框图图2 MAX7219的数据传送时序MAX7219 内部具有14个可寻址数字和控制寄存器。
其中的8个数字寄存器由一个片内8×8双端口SRAM实现。
它们可直接寻址,因此可对单个数进行更新并且通常只要 V+超过2V数据就可保留下去。
除8个数位寄存器之外,还有无操作、译码方式、亮度调整、扫描位数、睡眠模式和显示器测试6个控制寄存器。
无操作寄存器用于多片MAX7219级联,在不改变显示或不影响任意控制寄存器条件下,它允许数据从DIN传送到DOUT。
MAX7219驱动单个8X8点阵LED模块
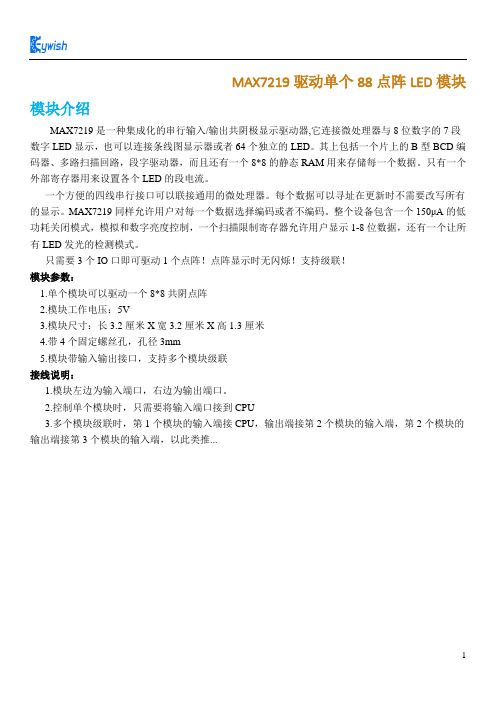
MAX7219驱动单个88点阵LED模块模块介绍MAX7219 是一种集成化的串行输入/输出共阴极显示驱动器,它连接微处理器与8位数字的7段数字LED显示,也可以连接条线图显示器或者64个独立的LED。
其上包括一个片上的B型BCD编码器、多路扫描回路,段字驱动器,而且还有一个8*8的静态RAM用来存储每一个数据。
只有一个外部寄存器用来设置各个LED的段电流。
一个方便的四线串行接口可以联接通用的微处理器。
每个数据可以寻址在更新时不需要改写所有的显示。
MAX7219同样允许用户对每一个数据选择编码或者不编码。
整个设备包含一个150μA的低功耗关闭模式,模拟和数字亮度控制,一个扫描限制寄存器允许用户显示1-8位数据,还有一个让所有LED发光的检测模式。
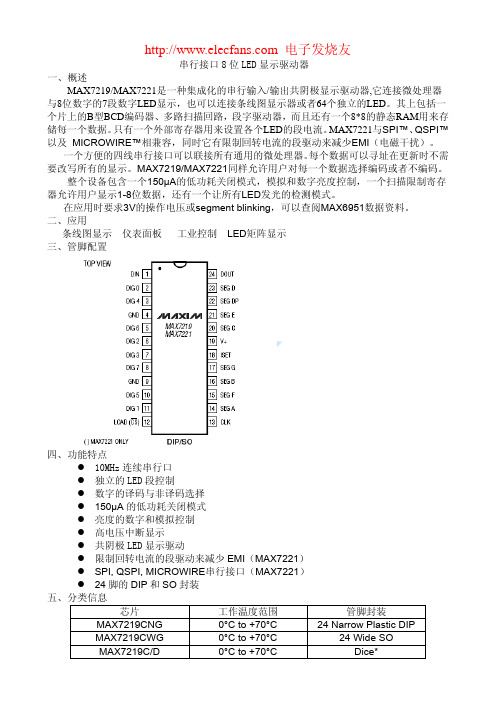
只需要3个IO口即可驱动1个点阵!点阵显示时无闪烁!支持级联!模块参数:1.单个模块可以驱动一个8*8共阴点阵2.模块工作电压:5V3.模块尺寸:长3.2厘米X宽3.2厘米X高1.3厘米4.带4个固定螺丝孔,孔径3mm5.模块带输入输出接口,支持多个模块级联接线说明:1.模块左边为输入端口,右边为输出端口。
2.控制单个模块时,只需要将输入端口接到CPU3.多个模块级联时,第1个模块的输入端接CPU,输出端接第2个模块的输入端,第2个模块的输出端接第3个模块的输入端,以此类推...器件列表◆Keywish Arduino Uno R3 主板*1◆USB 接口线*2◆MAX7219显示驱动器*1◆8位数字的7段数字LED显示*1◆跳线*4接线Arduino MAX7219显示驱动器VCC VCCGND GND5 CLK6 CS7 DIN程序#include "LedControl.h"int DIN =7;int CS =6;int CLK =5;byte e[8]={0x7C,0x7C,0x60,0x7C,0x7C,0x60,0x7C,0x7C};byte d[8]={0x78,0x7C,0x66,0x66,0x66,0x66,0x7C,0x78};byte u[8]={0x66,0x66,0x66,0x66,0x66,0x66,0x7E,0x7E};byte c[8]={0x7E,0x7E,0x60,0x60,0x60,0x60,0x7E,0x7E};byte eight[8]={0x7E,0x7E,0x66,0x7E,0x7E,0x66,0x7E,0x7E};byte s[8]={0x7E,0x7C,0x60,0x7C,0x3E,0x06,0x3E,0x7E};byte dot[8]={0x00,0x00,0x00,0x00,0x00,0x00,0x18,0x18};byte o[8]={0x7E,0x7E,0x66,0x66,0x66,0x66,0x7E,0x7E};byte m[8]={0xE7,0xFF,0xFF,0xDB,0xDB,0xDB,0xC3,0xC3};LedControl lc=LedControl(DIN,CLK,CS,0);void setup(){lc.shutdown(0,false);//The MAX72XX is in power-saving mode on startup lc.setIntensity(0,15);// Set the brightness to maximum valuelc.clearDisplay(0);// and clear the display}void loop(){byte smile[8]={0x3C,0x42,0xA5,0x81,0xA5,0x99,0x42,0x3C};byte neutral[8]={0x3C,0x42,0xA5,0x81,0xBD,0x81,0x42,0x3C};byte frown[8]={0x3C,0x42,0xA5,0x81,0x99,0xA5,0x42,0x3C};printByte(smile);delay(1000);printByte(neutral);delay(1000);printByte(frown);delay(1000);printEduc8s();lc.clearDisplay(0);delay(1000);}void printEduc8s(){printByte(e);delay(1000);printByte(d);delay(1000);printByte(u);delay(1000);printByte(c);delay(1000);printByte(eight);delay(1000);printByte(s);delay(1000);printByte(dot);delay(1000);printByte(c);delay(1000);printByte(o);delay(1000);printByte(m);delay(1000);}void printByte(byte character []) {int i =0;for(i=0;i<8;i++){lc.setRow(0,i,character[i]); }}实验结果。
max7219驱动数码管程序(51单片机+STM32 MAX7219数码管程序案例)

SPI1_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB; //高位MSB在先
SPI1_InitStructure.SPI_CPOL = SPI_CPOL_High; //选择了串行时钟的稳态,时钟悬空高
*功能:STM32_SPI1硬件配置初始化
*入口参数:无
*出口参数:无
*说明:STM32_SPI1硬件配置初始化,使用3V3
****************************************************************************/
void SPI1_Init(void)
SPI1_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//数据捕获于第二个时钟沿
SPI1_InitStructure.SPI_NSS = SPI_NSS_Soft;CPolynomial = 7;//CRC值计算的多项式
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOA,GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;//SPI1相关引脚
max7219使用详解介绍

D15~12 以 X 表示,代表可为 0,也可为 1。 Digit0~7 对应到 8 个数码管的地址。 Decode Mode:解码模式寄存器,其地址用 16 迚制表示为 0x09; Intensity:亮度调节寄存器,其地址用 16 迚制表示为 0x0A; Scan Limit:扫描范围寄存器,其地址用 16 迚制表示为 0x0B; Shutdown:省电模式,其地址用 16 迚制表示为 0x0C; Display Test:测试寄存器,其地址用 16 迚制表示为 0x0F;
这个图由三部分组成:
第一部分:是要显示的数据 第二部分:是要发送的数据 D7~D0 第三部分:是数码管的八个段,分别用 DP*,A,B,C,D,E,F,G(DP*表示小数点)
D7 来控制小数点的显示 在弄清这个图之前,我们有必要了解数码管的构造。 下面是数码管的构造图:
数码管有八个段(DP,A,B,C,D,E,F,G)每个段都有一个电路来驱动它, 当你要显示"0",就让 A,B,C,D,E,F 亮,让 G 灭。 当你要显示"1",就让 B,C 亮,让 A,D,E,F,G 灭。 其他的就丌用多说了。 我们再回过头去看 Code B Font 图, 当我们想让数码管显示"0",就向数据位 D3~D0 赋值"0000",那么 MAX7219 就会让 A,B,C,D,E NhomakorabeaF 亮,
max7219使用详解
Max7219驱动程序一般的MCU因IO脚驱动能力不够,再加之MCU IO口资源有限,产品开发中通常是通过专门的驱动IC来驱动数码管。
7.1 学会看DatasheetMAX7219就是一款可以同时驱动8个数码管的IC。
下图是其引脚图及典型应用电路:我们的CPU只须三根线就可以控制MAX7219,这三根线是:DIN(第一脚),CS(第12脚),CLK(第13脚)。
DIN是数据输入脚,我们要显示的数据就是通过这根线发送到MAX7219的;CS是片选脚,MCU通过把该脚电平拉低来选中MAX7219,或者说MAX7219通过判断该引脚是否为低电平来使能该芯片。
CLK是时钟引脚,该时钟频率是MCU给到MAX7219的,MCU与7219之间的通信频率就根据该信号做基准。
7.2 MAX7219数据格式我们要让8个数码管显示"12345678",这个过程是怎么实现的呢?首先,要搞清楚MAX7219的数据格式,看图:MAX7219是以16位数据接收和发送的,也就是MCU传给MAX7219的数据必须是16位。
下面分析这16位数据格式:D15~D12为X:表示可以为任意值,因为这四位MAX7219目前还用不到。
D11~D8为ADDRESS:表示MAX7219的地址。
D7~D0为DATA,并且位7为高位(最先发送),位0位低位(最后发送)。
也就是当MCU向MAX7219发送一个16位数据时,其中的D11~D8表示选择MAX7219哪个地址,即数据D7~D0是送到该地址的。
7.3 地址译码MAX7219可以挂8个数码管,MCU是怎么把数据显示到指定的数码管的呢?这就要理解MAX7219的地址译码原理。
下图为MAX7219的地址映射图:D15~12以X表示,代表可为0,也可为1。
Digit0~7对应到8个数码管的地址。
Decode Mode:解码模式寄存器,其地址用16进制表示为0x09;Intensity:亮度调节寄存器,其地址用16进制表示为0x0A;Scan Limit:扫描范围寄存器,其地址用16进制表示为0x0B;Shutdown:省电模式,其地址用16进制表示为0x0C;Display Test:测试寄存器,其地址用16进制表示为0x0F;如果,我们要让第一个数码管显示,那么我们这里送到MAX7219的16位数据中的D11~8应该为0001。
8位串行接口数码显示驱动器MAX7219及其应用
8位串行接口数码显示驱动器MAX7219及其应用潍坊高等专科学校 王瑞兰LED数码管的应用已十分广泛,用于数码管显示的驱动电路种类较多,但大致可分为静态显示驱动和动态扫描显示驱动两大类别。
本文所要介绍的MAX7219芯片就是 用于动态扫描显示驱动的芯片。
该芯片的特点是利用一块芯片就能完成8位字数据和8位线数据的驱动,使得电路紧凑。
多芯片级联时,采用串行输入输出,可节省CPU的口线和接口芯片。
与数码管联接时无需限流电阻,8位显示的电流可通过一个外部电阻进行调节。
显示亮度也可通过程序进行控制。
片内具有,可以对输入的数据先进行译码再驱动输出,也可以将输入的数据直接驱动。
一、管脚功能MAX7219采用24管脚DIP和SO两种封装形式,管脚排列如图1所示,各引脚功能见表1。
二、MAX7219内部结构MAX7219的内部功能框图如图2所示。
16位移位寄存器所存数据为D0~D15,见表2。
D8~D11为寄存器地址,D0-D7为数据,D12-D15为不关心位。
片内有14个寄存器,其中8个数据寄存器,寄存着与DIG 0-DIG 7对应的显示数据,地址依次为×1H-8H;6个控制寄存器,即译码控制寄存器(Decode Mode)、显示亮度控制寄存器(Intensity)、扫描频率限制寄存器(Scan Limit)、消隐控制寄存器(Shutdown)、显示测试寄存器Display Test)及无操作寄存器(No-Op),其地址依次为×9H-CH、×FH、×0H。
数据寄存器为8×8双指针SRAM。
因为各寄存器可直接寻址,所以寄存器的数据可分别进行修改。
寄存器的数据可以保存到电源电压降低到2V。
三、控制寄存器1. Shutdown 寄存器Shutdown 寄存器写入×××××××0B数据时,将呈现消隐状态。
max7219秒表程序(一键控制三个状态)

#include <reg51.h>#include "type.h"#include "max7219.h"/********************************************************************控制按键定义***********************************************************************/ sbit Key = P3^0;/********************************************************************变量定义***********************************************************************/uint16 Ms = 0;uint16 Sec = 0;uint8 k;uint8 Count = 0;/************************************************************************函数声明*************************************************************************/void Start_Stop();void Init_Timer0();void Delay();void Display();void Key_In();void Reset();/************************************************************************main()主函数*************************************************************************/void main(){Init_Max7219();Init_Timer0();while(1){Key_In();switch(k){case 0 : Reset();break;case 1 : Display();break;case 2 : TR0 = 0;break;}}}/************************************************************************定时器0中断函数*************************************************************************/void Interrupt_Timer0() interrupt 1{TH0 = 0xee;TL0 = 0x00;Count++;if(Count >= 2){Count = 0;Ms++;if(Ms >= 99) //100次为1s{Ms = 0; //秒数最大显示为99,之后从头开始计时Sec++;}if(Sec >= 99)Sec = 0; //秒加到99,重新计数}}/************************************************************************Reset()清零函数*************************************************************************/void Reset(){Init_Max7219();Init_Timer0();Ms = 0;Sec = 0;}/************************************************************************Display()函数*************************************************************************/void Display(){Write_Max7219(DIG_8,Ms%10);Write_Max7219(DIG_7,Ms/10);Write_Max7219(DIG_6,(Sec%10 | 0x80));Write_Max7219(DIG_5,Sec/10);}/***********************************************************************延时函数(约7毫秒)************************************************************************/void Delay(uint16 x){char i;while(x--){for(i=0;i<125;i++);}}/************************************************************************定时器0初始化*************************************************************************/void Init_Timer0(){TMOD |= 0x11; //初始化两个定时器TH0 = 0x33; //只用到定时器0,赋初值,中断一次5msTL0 = 0x00;TR0 = 1; //启用定时器0ET0 = 1; //允许定时器中断EA = 1; //将总中断打开}/************************************************************************按键控制*************************************************************************/ void Key_In(){if(!Key){Delay(19);if(!Key){k++;if(k>2){k = 0;}while(!Key);}}}max7219.h#ifndef _MAX7219_H_#define _MAX7219_H_/*********************************************************引脚位定义**********************************************************/sbit LOAD=P1^2; //MAX7219 Load-Data Input: rising edge pin 12 sbit DIN=P1^1; //MAX7219 Serial-Data Input: rising edge pin 1 sbit CLK=P1^0; //MAX7219/****************************************************MAX7219 宏定义*****************************************************/#define REG_NO_OP 0x00 // 定义空操作#define DIG_1 0x01 // 定义数码管1#define DIG_2 0x02 // 定义数码管2#define DIG_3 0x03 // 定义数码管3#define DIG_4 0x04 // 定义数码管4#define DIG_5 0x05 // 定义数码管5#define DIG_6 0x06 // 定义数码管6#define DIG_7 0x07 // 定义数码管7#define DIG_8 0x08 // 定义数码管8#define DECODE_MODE 0x09#define INTENSITY 0x0A#define SCAN_LIMIT 0x0B#define SHUT_DOWN 0x0C#define DISPLAY_TEST 0x0F/***********************************************************MAX7210函数声明************************************************************/void Write_Max7219_byte(uint8 temp);//write max7219 a bytevoid Write_Max7219(uint8 address,uint8 dat);//write max7219 command and data void Init_Max7219(void);//Initize max7219/************************************************************MAX7219地址、数据写入函数子程序*************************************************************/void Write_Max7219_byte(uint8 temp){uint8 i;for (i=0;i<8;i++){CLK = 0;DIN = (bit)(temp&0x80);temp <<= 1;CLK = 1;}}/*************************************************************MAX7219地址、数据写入**************************************************************/void Write_Max7219(uint8 address,uint8 dat){LOAD = 0;Write_Max7219_byte(address);Write_Max7219_byte(dat);LOAD = 1;}/**************************************************************MAX7219初始化***************************************************************/void Init_Max7219(void){Write_Max7219(SHUT_DOWN, 0x01);Write_Max7219(DISPLAY_TEST, 0x00);Write_Max7219(DECODE_MODE, 0xff);Write_Max7219(SCAN_LIMIT, 0x07); //SCAN LIMIT 0~7 0xX0~0xX7 Write_Max7219(INTENSITY, 0x04);Write_Max7219(DIG_7,0x00);Write_Max7219(DIG_5,0x00);Write_Max7219(DIG_6,0x80);Write_Max7219(DIG_8,0x00);}#endiftype.h#ifndef _TYPE_H_#define _TYPE_H_typedef unsigned char uint8;typedef unsigned int uint16;typedef unsigned long uint32;typedef char int8;typedef int int16;typedef long int32;#endif。
MAX7219共阴极LED驱动器程序
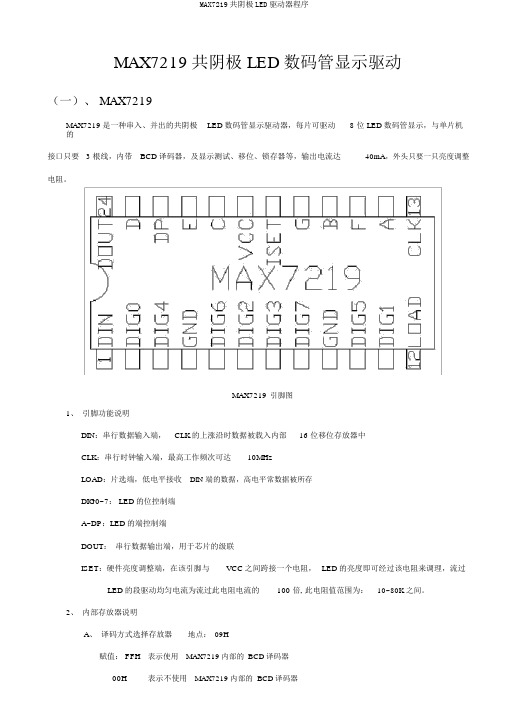
MAX7219共阴极 LED数码管显示驱动(一)、 MAX7219MAX7219是一种串入、并出的共阴极LED数码管显示驱动器,每片可驱动8 位 LED数码管显示,与单片机的接口只要 3 根线,内带BCD译码器,及显示测试、移位、锁存器等,输出电流达40mA,外头只要一只亮度调整电阻。
MAX7219引脚图1、引脚功能说明DIN:串行数据输入端,CLK的上涨沿时数据被载入内部16 位移位存放器中CLK:串行时钟输入端,最高工作频次可达10MHzLOAD:片选端,低电平接收DIN 端的数据,高电平常数据被所存DIG0~7: LED的位控制端A~DP:LED的端控制端DOUT:串行数据输出端,用于芯片的级联ISET:硬件亮度调整端,在该引脚与VCC之间跨接一个电阻,LED的亮度即可经过该电阻来调理,流过LED的段驱动均匀电流为流过此电阻电流的100 倍, 此电阻值范围为:10~80K 之间。
2、内部存放器说明A、译码方式选择存放器地点:09H赋值: FFH表示使用MAX7219内部的BCD译码器00H表示不使用MAX7219内部的 BCD译码器B、亮度调理存放器地点:0AH赋值:00H~0FH 可改变MAX7219所驱动的LED的亮度,其变化范围在1/32~31/32之间C、扫描位数设定存放器地点:0BH赋值: 00H所有位不显示01H~07H挨次对应于1~8 位及前方位所有显示(即需显示的位应为“1”)D、待机模式开关存放器地点:0CH赋值: 00H LED全灭01H LED正常显示E、显示器测试存放器地点: 0FH赋值: 00H LED为正常显示状态01H LED测试状态,即LED全亮F、8 位LED显示数据存放器地点: 01H~08H对这些存放器赋值(即需显示的内容),就会在对应的1~8 位LED数码管上显示出来3、使用注意事项因为电源中杂波或邻近的电磁等扰乱信号,使MAX7219在上电后不显示或乱显示;为了除去这类现象应在 MAX7219的 VCC端与地之间接一只104pf 的瓷片电容,在LOAD端于地之间接一只10K 的电阻。
max7219芯片4片级联C51程序与电路

send(0);//输入空操作 load=1;//收尾 LOAD 升高 }
write3(uchar pos,num)//同理,多输出一对空操作数 { load=0; send(pos); send(num);
send(0); send(0); send(0); send(0); load=1; }
}
void main()//主函数! { init();初始化四片 7219,里面的 write,write2,write3,write4 就是分别向 4 片 7219 写入数据的程序! for(number=1;number<9;number++)//简单的循环,让四片 7219 都显示出 1~8,顺 序相反 { write(number,number); write2(number,9-number); write3(number,number); write4(number,9-number);
4 片 7219 芯片级联 C51 程序与电路
7219 芯片可以直接带动 8 个数码管显示只需要 3 个 IO 口控制,功能强大,现 在用四片 7219 级联,使用 C 语言编程,力求简单、有效,借鉴了前辈的一些经 验,欢迎各路人马提出宝贵意见! 一.电路 这是在 proteus 中模拟的电路图:
看了这个图你一定知道 4 片 7219 级联是绝对可行的,那么请看细节:
write2(0x0c,1);//开启正常工作模式 1 正常 0 关闭芯片 write2(0x0f,0);//显示测试 正常工作 0 全亮 1 write2(0x09,0xff);//解码方式 0xff 全译码 write2(0x0b,0x07);//8 只 LED 全用 write2(0x0a,10);//亮度为 10
点阵屏驱动程序(MAX7219)
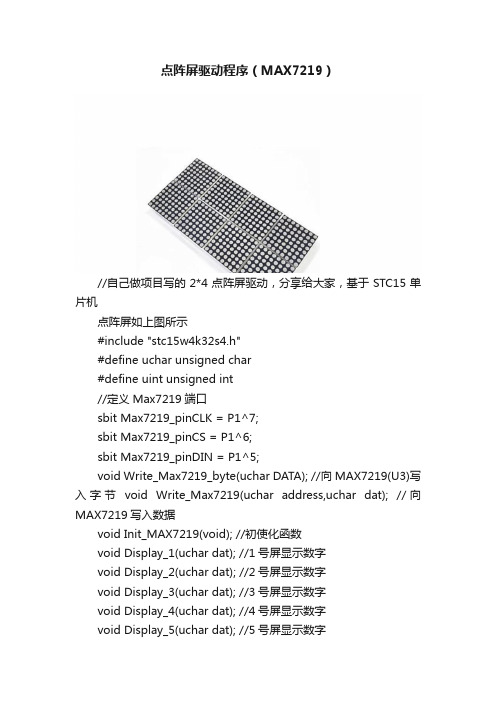
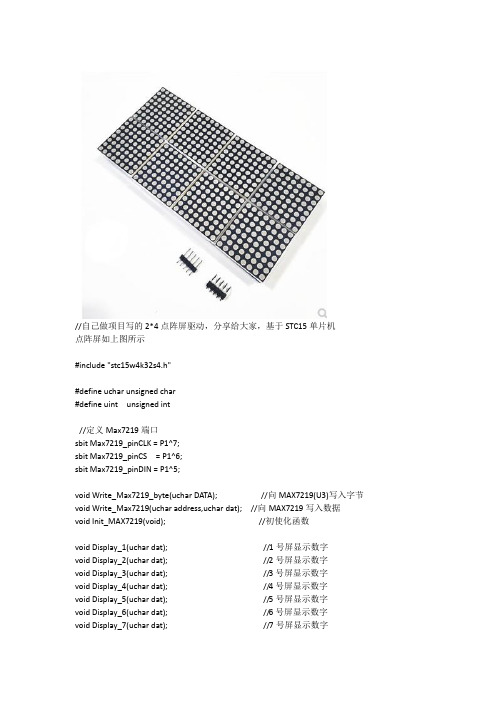
点阵屏驱动程序(MAX7219)//自己做项目写的2*4点阵屏驱动,分享给大家,基于STC15单片机点阵屏如上图所示#include "stc15w4k32s4.h"#define uchar unsigned char#define uint unsigned int//定义Max7219端口sbit Max7219_pinCLK = P1^7;sbit Max7219_pinCS = P1^6;sbit Max7219_pinDIN = P1^5;void Write_Max7219_byte(uchar DATA); //向MAX7219(U3)写入字节void Write_Max7219(uchar address,uchar dat); //向MAX7219写入数据void Init_MAX7219(void); //初使化函数void Display_1(uchar dat); //1号屏显示数字void Display_2(uchar dat); //2号屏显示数字void Display_3(uchar dat); //3号屏显示数字void Display_4(uchar dat); //4号屏显示数字void Display_5(uchar dat); //5号屏显示数字void Display_6(uchar dat); //6号屏显示数字void Display_7(uchar dat); //7号屏显示数字void Display_8(uchar dat); //8号屏显示数字、/* 8个点阵驱动程序 */uchar code disp1[38][8] ={{0x00,0x30,0x48,0x48,0x48,0x48,0x48,0x30}, //0{0x00,0x10,0x30,0x10,0x10,0x10,0x10,0x38}, //1{0x00,0x78,0x08,0x08,0x78,0x40,0x40,0x78}, //2{0x00,0x78,0x08,0x08,0x78,0x08,0x08,0x78}, //3{0x00,0x10,0x30,0x50,0x78,0x10,0x10,0x10}, //4{0x00,0x78,0x40,0x40,0x78,0x08,0x08,0x78}, //5{0x00,0x78,0x40,0x40,0x78,0x48,0x48,0x78}, //6{0x00,0x7C,0x04,0x08,0x10,0x10,0x10,0x10}, //7{0x00,0x78,0x48,0x48,0x78,0x48,0x48,0x78}, //8{0x00,0x78,0x48,0x48,0x78,0x08,0x08,0x78}, //9{0}, //显示空白10 {0x00,0x00,0x00,0x00,0x7e,0x00,0x00,0x00}, //显示负数符号11 {0x00,0x7C,0x40,0x40,0x7C,0x40,0x40,0x7C}, //E 12 {0x00,0x78,0x44,0x44,0x7C,0x48,0x48,0x44}, //R 13 {0x10,0x28,0x44,0x44,0x44,0x7C,0x44,0x44}, //A 14 {0x00,0x40,0x40,0x40,0x40,0x40,0x40,0x78}, //L 15 {0x00,0x70,0x88,0x80,0x80,0x80,0x88,0x70}, //C 16 };//--------------------------------------------//功能:向MAX7219(U3)写入字节//入口参数:DATA//出口参数:无//说明:void Write_Max7219_byte(uchar DATA){uchar i;Max7219_pinCS=0;for(i=8;i>=1;i--){Max7219_pinCLK=0;Max7219_pinDIN=DATA&0x80;DATA=DATA<<1;Max7219_pinCLK=1;}}//-------------------------------------------//功能:向MAX7219写入数据//入口参数:address、dat//出口参数:无//说明:void Write_Max7219(uchar address,uchar dat){uchar i;Max7219_pinCS=0;for(i=1;i<9;i++){Write_Max7219_byte(address); //写入地址,即数码管编号Write_Max7219_byte(dat); //写入数据,即数码管显示数字}Max7219_pinCS=1;}void Init_MAX7219(void) //初使化7219{Write_Max7219(0x09, 0x00); //译码方式:1;BCD码,0;非BCD模式Write_Max7219(0x0a, 0x0a); //亮度0-f (0-16) Write_Max7219(0x0b, 0x07); //扫描界限;8个数码管显示Write_Max7219(0x0c, 0x01); //掉电模式:0,普通模式:1Write_Max7219(0x0f, 0x00); //显示测试:1;测试结束,正常显示:0Write_Max7219(1,0); //清除缓冲区数据,消除显示误差Write_Max7219(2,0); //清除缓冲区数据,消除显示误差Write_Max7219(3,0); //清除缓冲区数据,消除显示误差Write_Max7219(4,0); //清除缓冲区数据,消除显示误差Write_Max7219(5,0); //清除缓冲区数据,消除显示误差Write_Max7219(6,0); //清除缓冲区数据,消除显示误差Write_Max7219(7,0); //清除缓冲区数据,消除显示误差Write_Max7219(8,0); //清除缓冲区数据,消除显示误差}/***************************************************/void Display_1(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}}void Display_2(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}}void Display_3(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}}void Display_4(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}}void Display_5(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}void Display_6(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Write_Max7219_byte(0);Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}}void Display_7(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Write_Max7219_byte(0);Write_Max7219_byte(0);Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}void Display_8(uchar dat){uchar i;for(i=1;i<9;i++){Max7219_pinCS=0;Write_Max7219_byte(i); //写入地址,即数码管编号Write_Max7219_byte(disp1[dat][i-1]); //写入数据,即数码管显示数字Max7219_pinCS=1;Write_Max7219(0,0); //清除缓冲区数据,消除显示误差}}void main(void){Init_MAX7219();Display_1(0); //1号屏显示数字0Display_2(1); //2号屏显示数字1Display_3(2); //3号屏显示数字2Display_4(3); //4号屏显示数字3Display_5(4); //5号屏显示数字4Display_6(5); //6号屏显示数字5Display_7(6); //7号屏显示数字6Display_8(7); //8号屏显示数字7while(1);}。
MAX7219级联教程
河南工业大学爬山虎工作室
DIN=1; else DIN=0; Dat <<= 1; CLK = 1; _nop_(); _nop_(); CLK = 0; } for(i=0;i<Num_Addr;i++) { for(j=0;j<16;j++) { CLK = 0; DIN = 0; CLK = 1; _nop_(); _nop_(); CLK = 0; } } LOAD = 1; } void Initialise7219()//初始化 { //第 0 个 7219 初始化 Write(0x00,0x09,0xff); //编码模式 Write(0x00,0x0b,0x07); //全部扫描 Write(0x00,0x0c,0x01); //正常模式:1,掉电模式:0 Write(0x00,0x0a,0x07); //消隐时间设为 T/2 //第 1 个 7219 初始化 Write(0x01,0x09,0xff); //编码模式 Write(0x01,0x0b,0x07); //全部扫描 Write(0x01,0x0c,0x01); //正常模式 Write(0x01,0x0a,0x07); //消隐时间设为 T/2 } void main() { u8 i; Initialise7219(); DelayMS(1); for(i=0;i<8;i++) {
河南工业大学爬山虎工作室
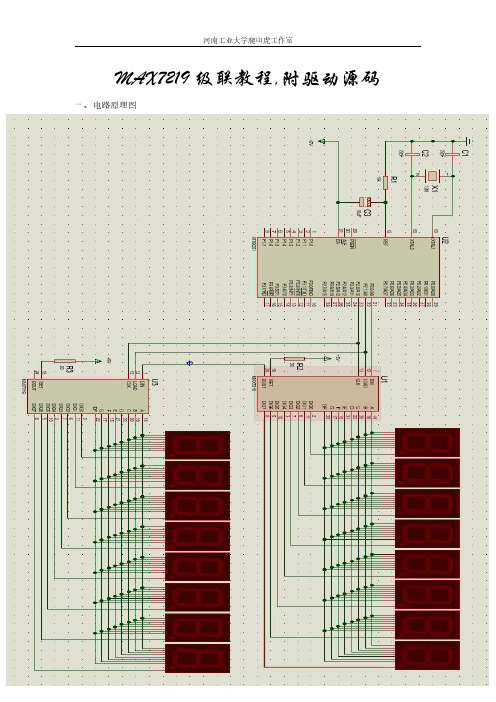
MAX7219 级联教程,附驱动源码
一、电路原理图
河南工业大学爬山虎工作室
二、 级联程序
#include <reg52.h> #include <intrins.h> #define u8 unsigned char #define uint unsigned int sbit DIN = P2^0; sbit LOAD = P2^1; sbit CLK = P2^2; u8 Disp_Buffer[8]={2,0,0,9,10,8,10,9}; //软件延时函数,延时 xms void DelayMS(uint x) { u8 t; while(x--) { for(t=120;t>0;t--); } } //向第 Num_Addr 片 7219 的 Addr 寄存器写入一个 Dat 数据 //Num_Addr:7219 地址(0~255) //Addr:7219 数显寄存器地址(1~8) //Dat:要显示的数据(0~15)(含字母) void Write(u8 Num_Addr,u8 Addr,u8 Dat) { u8 i,j; LOAD = 0; for(i=0;i<8;i++) { CLK = 0; if(Addr&0x80) DIN=1; else DIN=0; Addr <<= 1; CLK = 1; _nop_(); _nop_(); CLK = 0; } for(i=0;i<8;i++) { CLK = 0; if(Dat&0x80)
MAX7219级联教程
河南工业大学爬山虎工作室
DIN=1; else DIN=0; Dat <<= 1; CLK = 1; _nop_(); _nop_(); CLK = 0; } for(i=0;i<Num_Addr;i++) { for(j=0;j<16;j++) { CLK = 0; DIN = 0; CLK = 1; _nop_(); _nop_(); CLK = 0; } } LOAD = 1; } void Initialise7219()//初始化 { //第 0 个 7219 初始化 Write(0x00,0x09,0xff); //编码模式 Write(0x00,0x0b,0x07); //全部扫描 Write(0x00,0x0c,0x01); //正常模式:1,掉电模式:0 Write(0x00,0x0a,0x07); //消隐时间设为 T/2 //第 1 个 7219 初始化 Write(0x01,0x09,0xff); //编码模式 Write(0x01,0x0b,0x07); //全部扫描 Write(0x01,0x0c,0x01); //正常模式 Write(0x01,0x0a,0x07); //消隐时间设为 T/2 } void main() { u8 i; Initialise7219(); DelayMS(1); for(i=0;i<8;i++) {
更多资源和知识请关注微信公共号 河爬山虎工作室。 分享资源、拒绝技术封锁。 快来加入我们吧。
河南工业大学爬山虎工作室
二、 级联程序
#include <reg52.h> #include <intrins.h> #define u8 unsigned char #define uint unsigned int sbit DIN = P2^0; sbit LOAD = P2^1; sbit CLK = P2^2; u8 Disp_Buffer[8]={2,0,0,9,10,8,10,9}; //软件延时函数,延时 xms void DelayMS(uint x) { u8 t; while(x--) { for(t=120;t>0;t--); } } //向第 Num_Addr 片 7219 的 Addr 寄存器写入一个 Dat 数据 //Num_Addr:7219 地址(0~255) //Addr:7219 数显寄存器地址(1~8) //Dat:要显示的数据(0~15)(含字母) void Write(u8 Num_Addr,u8 Addr,u8 Dat) { u8 i,j; LOAD = 0; for(i=0;i<8;i++) { CLK = 0; if(Addr&0x80) DIN=1; else DIN=0; Addr <<= 1; CLK = 1; _nop_(); _nop_(); CLK = 0; } for(i=0;i<8;i++) { CLK = 0; if(Dat&0x80)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。
该芯片具有10MHz传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED的段电流。
它的操作很简单,MCU只需通过模拟SPI三线接口就可以将相关的指令写入MAX721 9的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。
此外它还支持多片7219串联方式,这样MCU就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。
MAX7219的外部引脚分配如图1所示及内部结构如图2所示。
图1 MAX7219的外部引脚分配
图2 MAX7219的内部引脚分配
各引脚的功能为:
DIN:串行数据输入端
DOUT:串行数据输出端,用于级连扩展
LOAD:装载数据输入
CLK:串行时钟输入
DIG0~DIG7:8位LED位选线,从共阴极LED中吸入电流
SEG A~SEG G DP 7段驱动和小数点驱动
ISET:通过一个10k电阻和Vcc相连,设置段电流
MAX7219有下列几组寄存器:(如图3)
MAX7219内部的寄存器如图3,主要有:译码控制寄存器、亮度控制寄存器、扫描界限寄存器、关断模式寄存器、测试控制寄存器。
编程时只有正确操作这些寄存器,MAX7219才可工作。
图 3 MAX7219内部的相关寄存器
分别介绍如下:
(1)译码控制寄存器(X9H)
如图4所示,MAX7219有两种译码方式:B译码方式和不译码方式。
当选择不译码时,8个数据为分别一一对应7个段和小数点位;B译码方式是BCD译码,直接送数据就可以显示。
实际应用中可以按位设置选择B译码或是不译码方式。
图4 MAX7219的译码控制寄存器
(2)扫描界限寄存器(XBH)
如图5所示,此寄存器用于设置显示的LED的个数(1~8),比如当设置为0xX4时,LED 0~5显示。
图5 MAX7219的扫描界限控制寄存器
(3)亮度控制寄存器(XAH)
共有16级可选择,用于设置LED的显示亮度,从0xX0~0xXF
(4)关断模式寄存器(XCH)
共有两种模式选择,一是关断状态,(最低位D0=0)一是正常工作状态(D0=1)。
(5)显示测试寄存器(XFH)
用于设置LED是测试状态还是正常工作状态,当测试状态时(最低位D0=1)各位显示全亮,正常工作状态(D0=0)。
各寄存器具体操作见驱动程序详解。
2 读写时序说明
MAX7129是SPI总线驱动方式。
它不仅要向寄存器写入控制字,还需要读取相应寄存器的数据。
要想与MAX7129通信,首先要先了解MAX7129的控制字。
MAX7129的控制字格式如图6。
图6 控制字(即地址及命令字节)
如图,工作时,MAX7219规定一次接收16位数据,在接收的16位数据中:D15~D12可以与操作无关,可以任意写入,D11~D8决定所选通的内部寄存器地址,D7~D0为待显示数据或是初始化控制字。
在CLK脉冲作用下,DIN的数据以串行方式依次移入内部16位寄存器,然后在一个LOAD上升沿作用下,锁存到内部的寄存器中。
注意在接收时,先接收最高位D16,最后是D0,因此,在程序发送时必须先送高位数据,在循环移位。
工作时序图见图7。
由于51是8位单片机故需要分两次来送数据。
具体操作见驱动程序详解。
图7 数据读写时序
3 电路原理图
电路原理图
电路原理图如图7,MAX7219与单片机的连接只需要3条线:LOAD(CS)片选引脚、CLK串行时钟引脚、DIN串行数据引脚。
其中C1 为电源滤波电容,R1用来设置段电流。
MAX7219的PCB布线有些难度,作者可以提供画好的PCB给读者。
有需要的读者请与作者联系。
邮箱:********************
图8 电路原理图
4 驱动程序
//管脚定义
sbit LOAD=P1^2; //MAX7219片选12脚
sbit DIN=P1^1; //MAX7219串行数据1脚
sbit CLK=P1^0; //MAX7219串行时钟13脚
//寄存器宏定义
#define DECODE_MODE 0x09 //译码控制寄存器
#define INTENSITY 0x0A //亮度控制寄存器
#define SCAN_LIMIT 0x0B //扫描界限寄存器
#define SHUT_DOWN 0x0C //关断模式寄存器
#define DISPLAY_TEST 0x0F //测试控制寄存器
//函数声明
void Write7219(unsigned char address,unsigned char dat);
void Initial(void);
//地址、数据发送子程序
void Write7219(unsigned char address,unsigned char dat)
{
unsigned char i;
LOAD=0; //拉低片选线,选中器件
//发送地址
for (i=0;i<8;i++) //移位循环8次
{
CLK=0; //清零时钟总线
DIN=(bit)(address&0x80); //每次取高字节
address<<=1; //左移一位
CLK=1; //时钟上升沿,发送地址
}
//发送数据
for (i=0;i<8;i++)
{
CLK=0;
DIN=(bit)(dat&0x80);
dat<<=1;
CLK=1; //时钟上升沿,发送数据
}
LOAD=1; //发送结束,上升沿锁存数据
}
//MAX7219初始化,设置MAX7219内部的控制寄存器
void Initial(void)
{
Write7219(SHUT_DOWN,0x01); //开启正常工作模式(0xX1)Write7219(DISPLAY_TEST,0x00); //选择工作模式(0xX0)
Write7219(DECODE_MODE,0xff); //选用全译码模式
Write7219(SCAN_LIMIT,0x07); //8只LED全用
Write7219(INTENSITY,0x04); //设置初始亮度
}
测试程序void main(void)
{
unsigned char i;
Initial(); //MAX7219初始化
while(1)
{
for(i=1;i<9;i++)
{
Write7219(i,i); //数码管显示1~8
}
}
}
典型应用电路:。