优选MAX典型电路ppt
宋MAX-电路识图及CAN网络

说明
前鼓风机 继电器
制动真 空泵继 电器
远光灯 继电器
喇叭继 电器
电喷主继 电器
冷却液循 环泵继电
器
A/C继电 器
前雾灯继 电器
编号 K1-12 K1-14 K1-15 K1-16 K1-17 K1-21 K1-23
说明
前洗涤继 电器
近光灯 继电器
后洗涤 继电器
起动机 继电器
昼行灯继 电器
前雨刮开 关继电器
PM2.5模块
仪表板配电盒
网关控制器
空调控制器
IK控制器
第17页
右C柱
驻车辅助模块
后配电盒
胎压监测控制模块
第18页
左C柱及地板
高频接收模块
EPB控制模块
外置功放(IPD)
第19页
2.2 整车线束分布图
第20页
3 配电盒介绍
第21页
3.1 前舱配电盒:外挂在前舱线束
第22页
F1-16 F1-6 F1-1
第11页
图例
电路图中标示
线色、线径
双色导线的线色布置如图: A为主色,B为辅色
线色 线径
第12页
2、保险编号规则 1. 前舱配电盒附配的保险按相应位置编号为F1/1、F1/2…… 2. 仪表板配电盒附配的保险按相应位置编号为F2/1、F2/2…… 3. 前舱正极保险盒附配的保险按相应位置编号为F3/1、F2/2…… 4. 地板线束附配的保险按相应位置编号为F4/1、 F4/2……
保险位置 F2/23 F2/24 F2/25 F2/26 F2/27 F2/28 F2/29 F2/30 F2/31 F2/32 F2/33 F2/34 F2/35 F2/36 F2/37 F2/38 F2/39 F2/40 F2/41 F2/42 FS1-6
EDA技术- MAX II工具使用PPT课件
19
4.4 MAX+plusII 原理图输入设计方法 原理图设计方法的基本步骤: 步骤4:选择目标器件并编译
3. 打开编译器
选择编译器
编译窗:此编译器的功能包括网表文件提取、设计文件排错、
逻辑综合、逻辑分配、适配(结构综合)、时序仿真文件提取、
编程下载文件装配等
2021/3/18
20
4.4 MAX+plusII 原理图输入设计方法
原理图设计方法的基本步骤: 5. 加入输入信号
步骤5:时序仿真
2021/3/18
27
4.4 MAX+plusII 原理图输入设计方法
原理图设计方法的基本步骤: 6. 波形文件存盘
步骤5:时序仿真
在 File 菜单中选 择 Save as
输入文件名 默认自动名 后缀 .SCF
最后按 “OK”
2021/3/18
原理图设计方法的基本步骤:
步骤3:将设计项目设置成工程文件(PROJECT)
为了使软件对输入的项目进行处理,必须将设计文件, 如刚输入的h_adder.gdf,设置成Project(顶层文件)
最后注意此路 径指向的改变
首先点击这里 然后选择此项,将当前的原理图设计文件设置成工程(顶层文件)
如果设计文件未打开,选择“File” “Project” “Name”,在弹出的
EDA技术
MAX+plus 开发工具
பைடு நூலகம்
任课教师:安国臣 电子邮箱:
2021/3/18
1
第四部分 MAX+plus 开发工具
本部分首先回顾FPGA/CPLD开发 和ASIC设计的流程,然后分别介绍与这 些设计流程中各环节密切相关的EDA工 具软件,最后就MAX+plusII的基本情 况和EDA重用模块IP作一简述。
max858典型工作电路
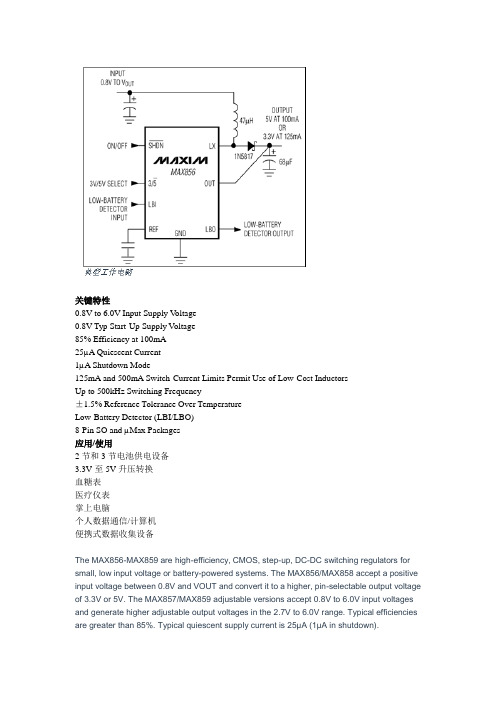
关键特性0.8V to 6.0V Input Supply V oltage0.8V Typ Start-Up Supply V oltage85% Efficiency at 100mA25µA Quiescent Current1µA Shutdown Mode125mA and 500mA Switch-Current Limits Permit Use of Low-Cost InductorsUp to 500kHz Switching Frequency±1.5% Reference Tolerance Over TemperatureLow-Battery Detector (LBI/LBO)8-Pin SO and µMax Packages应用/使用2节和3节电池供电设备3.3V至5V升压转换血糖表医疗仪表掌上电脑个人数据通信/计算机便携式数据收集设备The MAX856-MAX859 are high-efficiency, CMOS, step-up, DC-DC switching regulators for small, low input voltage or battery-powered systems. The MAX856/MAX858 accept a positive input voltage between 0.8V and VOUT and convert it to a higher, pin-selectable output voltage of 3.3V or 5V. The MAX857/MAX859 adjustable versions accept 0.8V to 6.0V input voltages and generate higher adjustable output voltages in the 2.7V to 6.0V range. Typical efficiencies are greater than 85%. Typical quiescent supply current is 25µA (1µA in shutdown).The MAX856-MAX859 combine ultra-low quiescent supply current and high efficiency to give maximum battery life. An internal MOSFET power transistor permits high switching frequencies. This benefit, combined with internally set peak inductor current limits, permits the use of small, low-cost inductors. The MAX856/MAX857 have a 500mA peak inductor current limit. The MAX858/MAX859 have a 125mA peak inductor current limit.。
max7219资料及电路图
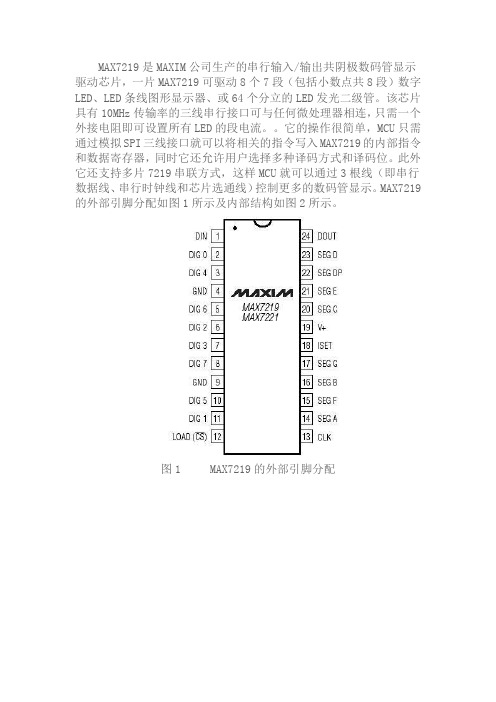
MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。
该芯片具有10MHz传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED的段电流。
它的操作很简单,MCU只需通过模拟SPI三线接口就可以将相关的指令写入MAX7219的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。
此外它还支持多片7219串联方式,这样MCU就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。
MAX7219的外部引脚分配如图1所示及内部结构如图2所示。
图1 MAX7219的外部引脚分配图2 MAX7219的内部引脚分配各引脚的功能为:DIN:串行数据输入端DOUT:串行数据输出端,用于级连扩展LOAD:装载数据输入CLK:串行时钟输入DIG0~DIG7:8位LED位选线,从共阴极LED中吸入电流SEG A~SEG G DP 7段驱动和小数点驱动ISET:通过一个10k电阻和Vcc相连,设置段电流MAX7219有下列几组寄存器:(如图3)MAX7219内部的寄存器如图3,主要有:译码控制寄存器、亮度控制寄存器、扫描界限寄存器、关断模式寄存器、测试控制寄存器。
编程时只有正确操作这些寄存器,MAX7219才可工作。
图 3 MAX7219内部的相关寄存器分别介绍如下:(1)译码控制寄存器(X9H)如图4所示,MAX7219有两种译码方式:B译码方式和不译码方式。
当选择不译码时,8个数据为分别一一对应7个段和小数点位;B译码方式是BCD译码,直接送数据就可以显示。
实际应用中可以按位设置选择B译码或是不译码方式。
图4 MAX7219的译码控制寄存器(2)扫描界限寄存器(XBH)如图5所示,此寄存器用于设置显示的LED的个数(1~8),比如当设置为0xX4时,LED 0~5显示。
大学微机原理半导体存储器详解演示文稿

不可再次改写。
PROM基本存储电路
PROM的写入要由专用的电路(大
电流、高电压)和程序完成。
第17页,共36页。
第5章 半导体存储器
5.3.2 可擦除的PROM 一、EPROM(紫外线可擦除) 用户可以多次编程。用紫外线照射可全部擦除原有信息(擦除后内容 全为“1” ),便可再次改写。
一、RAM原理
构成
存储体(R-S触发器构成的存储矩阵) 外围电路 译码电路、缓冲器
I/O控制电路
0
0
地
1
1
数
址
存储
据
n位 译
矩阵
缓
地址 码 2n-1
m
冲
器
器
m位 数据
CS 控制 逻辑
R/W
存储芯片构成示意图
第6页,共36页。
第5章 半导体存储器
地址译码器:
接收来自CPU的n位地址,经译码后产生2n个地址选择信号,实现对片
3. 按存储器的功能来分类 ✓按存储器与CPU的关系分类
控制存储器CM 、主存储器MM 、高速缓冲存储器Cache 、
外存储器EM ;
✓按存储器的读写功能分类 读写存储器RWM 、只读存储器ROM;
✓按数据存储单元的寻址方式分类
随机存取存储器RAM 、顺序存取存储器SAM 、直接存取存储器DAM ;
内存储单元的选址。
控制逻辑电路:
接收片选信号CS及来自CPU的读/写控制信号,形成芯片内部控制信号, 控制数据的读出和写入。
数据缓冲器:
寄存来自CPU的写入数据或从存储体内读出的数据。
存储体:
存储体是存储芯片的主体,由基本存储元按照一定的排列规律构成。
最新常用电机控制电路图PPT课件

SB1 SB2 KM1 KM2 KM3 KM4
KT1 KT2 KT3
(b)电路 之
改进: 逐步 退出 KT1、
KM2、 KT2、 KM3、
KT3
FR SB1
SB2
KM1
KM2
KT1 KM2 KT2 KM3 KT3 KM4
KM3
KM4
KM1 KT1 KM2 KT2 KM3 KT3 KM4
图2-15(c)
a.改变极对数p——变极调速; b.改变转差率S——串级调速; c.改变频率f—变频调速。
下面介绍鼠笼式交流电动机变极调速及绕线型电 动机在转子中分级串电阻调速。
变极调速控制线路 这一线路的设计思想是通过改变电机绕组的接线方
式来达到调速目的。速度的调节即接线方式的改变, 也是采用时间继电器按照时间原则来完成的。 变极电动机一般有双速、三速、四速之分,双速电 动机定子装有一套绕组,三速、四速则为两套绕组。
KM3 2R
I < KI3
KM2 1R
I < KI1
2、按电流原则控制
FR SB1
SB2
KM1
KA KI1
KM1
KI2
KI2
KM1
KA KM2 KM3 KT4
图2-16电流原则控制转子电路串电阻起动
控制线路
2.2 鼠笼式异步电动机的制动控制线路
制动方式有电气的方法和电气机械结合的方法。前 者如反接制动,能耗制动;后者如电磁机械抱闸。
SB2
KT
KM2
KT
KM1 KM2 KT
KA
KM1 KM2 KT
图2-8(b-2)KM1退出带来的自锁回路的改变,
采用KA触点扩展
采用KT瞬时动作触点
MAX的信号发生器的设计

电子测量电子小产品设计报告系别:电子与电气工程学院专业:微电子技术项目名称:基于MAX038函数信号发生器的设计与制作班号:微电122 姓名:邱灵辉、马德胜、陆庆文宋永浩、左传磊、王帅军常州信息职业技术学院一.设计思路信号发生器是实验室的基本设备之一,目前广泛使用的是一些标准产品,虽然功能齐全、性能指标较高,但是价格较贵,而且许多功能却用不上。
MAX038是MAXIM公司生产的一个只需要很少外部元件的精密高频波形产生器,他能产生准确的高频正弦波、三角波、方波。
输出频率和占空比可以通过调整电流、电压或电阻来分别地控制。
所需的输出波形可由在A0和A1输入端设置来选择.MAX038的引脚功能如下所示:REF:2.50 V带隙基准电压输出端;6,9,11,18:GND地;A0:波形选择输入端,TTL/CMOS兼容;A1:波形选择输人端,TTL/CMOS兼容;COSC:外部电容连接端;DADJ:占空比调整输入端;FADJ:频率调整输入端;IIN:用于频率控制的电流输入端;PDO:相位检波器输出端。
如果不用相位检波器则接地;PDI:相位检波器基准时钟输入端。
如果不用相位检波器则接地;SYNC:TTL/CMOS兼容的同步输出端,可由DGND至DV+间的电压作为基准。
可以用一个外部信号来同步内部的振荡器。
如果不用则开路;DGND:数字地。
让他开路使SYNC无效,或是SYNC不用;DV+:数字+5 V电源。
如果SYNC不用则让他开路;V+:+5 V电源;OUT:正弦波、方波或三角波输出端;MAX038 信号发生器二.方案设计2.1信号产生电路该简易信号发生器可以输出三角波、方波、正弦波和阶跃波4种波形;3个固定频率选择;以及10个电压选择。
此外,为了更好的满足大多数实验与电路检测的要求,该信号发生器还可以输出电荷量。
该信号发生器电路主要由信号产生电路、电压电荷输出电路和电源模块三部分组成。
对于三角波、方波、正弦波3种信号,其信号产生电路的核心器件为MAX038,3种输出波形由波形设定端A0,A1控制,其编码如表2所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当DI=1,则A=1,B=0。
GND:接地。
A:同相接收器输入和同相驱动器输出。
B:反相接收器输入和反相驱动器输出。
图9.1 MAX485芯片的
VCC:电源端,一般接+5V。
DIP封装管脚图
MAX485典型的工作电路如图9.2所示,其中平衡电阻Rp 通常取100~300欧姆。MAX485的收发功能见表9.3。
IIC总线上的第9个时钟对应于应答位,相应数据线上“0” 为“ACK”和“1”为“”。发送应答位和非应答位的子程序 分别如下。
①发送应答位ACK MACK: CLR SDA
SETB SCL NOP NOP CLR SCL SETB SDA RET
②发送非应答位ACK MNACK: SETB SDA
SETB SCL NOP NOP CLR SCL CLR SDA RET
RS-485接口可连接成半双工和全双工两种通信方式。 常见的半双工通信芯片有MAX481、MAX483、MAX485、 MAX487等,全双工通信芯片有MAX488、MAX489、 MAX490、MAX491等。
下面以MAX485为例来介绍RS-485串行接口的应用。MAX485
的封装有DIP、SO和uMAX三种,其中DIP封装的管脚如图9.1所示。
SETB SCL ;第9
NOP MOV C,SDA ;读SDA MOV F0,C ;转存入F0
CLR SCL
NOP
RET
(4)字节数据发送子程序
由于是SDA接在并行口线,无移位寄存器,因此数据通过指令 完成移位再从SDA串行输出。遵循时序要求,数据在时钟低电平 时变化,高电平时稳定,每一个时钟脉冲传送一位,编写字节数
该子程序的入口条件是待发送的字节位于累加器ACC中。
WRB: MOV R7,#8 WLP: RLC A ;欲发送位移入C JC WR1 ;此位为1,转WR1 CLR SDA ;此位为0,发送0
SETB SCL
NOP
NOP
CLR SCL DJNZ R7,WLP ;未发完8位,转WLP
RET
;8位已发完,返回
表9.3 MAX485的收发功能
89C51与MAX485的接口电路如图9.4所示。P1.7用来控制MAXBiblioteka 85的接收或发送,其余操作同串口 。
9.2 I2C总线扩展接口及应用
9.2.1 原理
I2C(IIC)总线是Philip公司推出的芯片间串行传输总线。 它用两根线实现了完善的全双工同步数据传送,可以极为 方便地构成多机系统和外围器件扩展系统。IIC总线采用了 器件地址的硬件设置方法,通过软件寻址完全避免了器件 的片选线寻址方法,从而使硬件系统具有简单灵活的扩展 方法。按照IIC总线规范,总线传输中的所有状态都生成相 对应的状态码,系统中的主机能够依照这些状态码自动地 进行总线管理,用户只要在程序中装入这些标准处理模块, 根据数据操作要求完成IIC总线的初始化,启动IIC总线就 能自动完成规定的数据传送操作。
WR1: SETB SDA ;此位为 1,发送1
SETB SCL ;时钟脉冲变高电
NOP NOP CLR SCL
;时钟脉冲变低电
CLR SDA DJNZ R7,WLP
RET
(5)字节数据接收子程序
该子程序的功能是在时钟的高电平时数据已稳定,读入一位,经过8 个时钟从SDA线上读入一个字节数据,并将所读字节存于A和R6
IIC总线接口为开漏或开集电极输出,需加上拉电 阻。系统中所有的单片机、外围器件都将数据线SDA 和时钟线SCL的同名端相连在一起,总线上的所有节 点都由器件和管脚给定地址。系统中可以直接连接具 有IIC总线接口的单片机,也可以通过总线扩展芯片或 I/O口的软件仿真与IIC总线相连。在IIC总线上可以挂 接各种类型的外围器件,如RAM/EEPROM、日历/时 钟、A/D、D/A、以及由I/O口、显示驱动器构成的各 种模块。
①发送起始条件START STA: SETB SDA
SETB SCL NOP NOP CLR SDA NOP NOP CLR SCL RET
②发送停止条件STOP STOP:CLR SDA
SETB SCL NOP NOP SETB SDA NOP NOP CLR SCL RET
(2)发送应答位和非应答位子程序
(3)应答位检查子程序 在I2C总线数据传送中,接收器收到发送器传送来的一个字节
后,必须向SDA线上返送一个应答位ACK,表明此字节已经收妥。 本子程序使单片机产生一个额外的时钟(第九个时钟脉冲,在脉冲 的高电平期间读ACK应答位,并将它的状态被复制到F0标志中以 供检查。若有正常ACK,则F0标志为0,否则为1。 CACK: SETB SDA ;SDA
RDB:MOV R7,#8 ;R7
RLP: SETB SDA ;SDA
第9章 串行接口技术
优选MAX典型电路ppt
内容提要
★ RS-485总线扩展 ★ IIC总线扩展接口及应用 ★ SPI总线扩展接口及应用
9.1 RS-485总线扩展
RS-485标准接口是单片机系统种常用的一种串行总线之 一。与RS-232C比较,其性能有许多改进,细节请见表9.1所示。
表9.1 RS-232C与RS-485性能比较
管脚的功能如下:
RO:接收器输出端。若A比B大200mV,RO为高;反之为低电平。
RE:接收器输出使能端。RE为低时,RO有效;为高时,RO呈高阻
状态。
DE:驱动器输出使能端。若DE=1,驱动器输
出A和B有效;若DE=0,则它们呈高阻态。若
驱动器输出有效,器件作为线驱动器用,反之
作为线接收器用。
DI:驱动器输入端。DI=0,有A=0,B=1;
9.2.2 软件IIC总线 假设单片机所用晶体振荡器的频率为6MHz。用P1.7和
P1.6分别模拟SDA和SCL,定义如下:
SDA EQU P1.7
SCL EQU P1.6 (1)产生起始位和停止位 如果单片机则每个机器周期为2us,我们可分别写出产生时
钟SCL和SDA的发送起始条件和停止条件两段子程序 如下。若晶振频率并非 6MHz,则要相应增删各程序 段中NOP指令的条数,以满足时序的要求。例如,若 fosc=12MHz ,则两条NOP指令应增至4条。