上下料机器人工作站
华数机器人上下料工作站毕业设计

华数机器人上下料工作站毕业设计一、引言在现代制造业中,自动化生产已经成为了大势所趋。
随着人工智能和机器人技术的不断发展,传统的生产模式正在发生改变。
华数机器人上下料工作站是一种新型的自动化生产设备,其毕业设计的研发将对生产线的效率和质量带来重大的改善。
二、华数机器人上下料工作站的设计原理与功能1. 设计原理华数机器人上下料工作站是基于先进的机器人技术和自动化控制技术开发的一种智能化生产设备。
其设计原理是通过机器人臂的自动抓取和放置,实现对产品的上下料操作,从而替代传统的人工操作,提高生产效率,减少人力成本。
2. 功能特点(1)高度自动化:华数机器人上下料工作站完全依靠机器人的自动化操作,实现了生产过程的高度自动化,减少了人为的干预,降低了操作风险。
(2)智能化控制:通过先进的控制系统,华数机器人上下料工作站能够实现智能化的操作,并且可以根据生产需求进行灵活的调整,提高了生产线的灵活性和适应性。
(3)高效节能:相比传统的人工上下料方式,华数机器人上下料工作站在提高生产效率的也减少了能源的消耗,符合可持续发展的要求。
三、华数机器人上下料工作站的应用前景随着制造业的不断发展和对生产效率要求的提高,华数机器人上下料工作站将会有着广阔的应用前景。
1. 在传统制造业中,华数机器人上下料工作站可以实现生产线的自动化升级,提高生产效率和产品质量,降低生产成本。
2. 在新兴的电子制造业中,华数机器人上下料工作站能够适应多品种、小批量生产的需求,提高生产线的灵活性和适应性,提升企业的竞争力。
3. 在工业4.0的背景下,华数机器人上下料工作站将成为智能工厂的重要组成部分,实现生产线的智能化管理和控制。
四、个人观点与理解华数机器人上下料工作站的毕业设计是一项非常具有前瞻性和实用性的课题。
通过研发该工作站,不仅可以提高生产效率、降低生产成本,更能够推动传统制造业向智能化、自动化的方向发展。
这也是对机器人技术和自动化控制技术的一种重要应用,将为制造业的升级和转型提供重要支撑。
机器人上下料工作站

多年质保操作简单方便快捷—————————————————————————————————————————————对于我们大多数人来说,社会发展速度这么快,生活中的一切都越来越智能化,机器人并不是什么难见的,作为一种新颖的能助力设备够比较节省人力,那么其上下料工作站你了解吗?接下来由安徽泰珂森智能装备科技有限公司为您简单介绍,希望能给您带来一定程度上的帮助。
工业机器人上下料作站由上下料机器人、数控机床、PLC控制柜、输送线、等组成。
1)上下料工业机器人上下料工业机器人包含:工业机器人、控制柜、示教器、末端执行器。
上下料工业机器人的选型一般根据自动生产线加工产品与设备布局来选用工业机器人及末端执行器。
2) 数控机床多年质保操作简单方便快捷—————————————————————————————————————————————数控机床的任务是对工件进行加工,而工件的上下料则由工业机器人完成。
3) PLC控制系统PLC控制柜用来安装断路器、PLC、开关电源、中间继电器、变压器等元件器。
4) 上下料输送线上下料输送线的功能是将载有待加工工件的托盘输送到上料工位,机器人将工件搬运至机床进行加工,再将加工完成的工件搬运到托盘上,由输送线将加工完成的工件输送到装配工作站进行装配。
工业机器人上下料工作流程如下:(1) 当载有待加工工件的托盘输送到上料位置后,机器人将工件多年质保操作简单方便快捷—————————————————————————————————————————————搬运到数控机床的加工台上;(2) 数控机床进行加工;(3) 加工完成,机器人将工件搬运到输送线上料位置的托盘上;(4) 上料输送线将载有已加工工件的托盘向装配工作站输送。
安徽泰珂森智能装备科技有限公司集机械手、工业机器人系统集成研发、制造、销售、自动化控制工程承包于一体的综合性自动化技术企业。
公司在自动化领域具备充足的技术研发能力和丰富的项目经验,为各行业工厂量身订做适合、先进的自动化控制系统和解决方案。
基于实训室数控机床上下料机器人工作站仿真设计

目录一、设计的背景和意义 (1)(一)设计的背景 (1)(二)设计的意义 (1)二、设计方案的论证和确定 (2)(一)设计要求分析 (2)(二)设计方案的确定 (2)三、设计过程 (2)(一)设计原理 (2)(二)机器人的选型和3D模型设计 (3)(三)工作站布局 (6)(四)信号连接 (7)(四)程序设计 (11)四、工作站运行与调试 (18)五、毕业设计总结 (20)六、参考文献 (21)七、致谢 (22)基于实训室数控机床上下料机器人工作站仿真设计一、设计的背景和意义(一)设计的背景随着技术的发展,机床行业日趋自动化、智能化。
以工业机器人来执行危险度与重复性较高的工作,不仅可以解放人力,提升效率及产能,更能够实现与机床的完美配合,进而提升加工品质。
正因为此,机床自动上下料机器人也收到越来越多企业的青睐。
机床自动上下料机器人是加工中心上下料环节取代人工完成工件的自动装卸功能,可以替代人工实现镗铣加工单元的生产线上的立式、卧式、龙门加工中心、数控镗铣床在加工过程中工件搬运、取件、装卸等上下料作业,以及工件翻转和工序转换。
主要适用对象为大批量、小型零部件的加工、重复性强或是工件重量较大以及工作环境具有高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中使用.具有定位经确、生产质量稳定、减少机床及刀具损耗、工作节拍可调、运行平稳可靠、维修方便等特点。
工业机器人能替代目前越来越昂贵的劳动力,同时能提升工作效率和产品品质。
可以长期工作,可以工作于有毒有害的场合,机器人具有执行各种任务特别是高危任务的能力,平均故障间隔期达60000小时以上,比传统的自动化工艺更加先进。
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
它可以接受人类指挥,也可以按照预先编写好的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
(二)设计的意义数控机床上下料机器人工作站,可以实现所有工艺过程的工件自动抓取、上料、下料、装卡等,能够节约人工成本,提高生产效率。
2 上下料工作站编程与调试

工业机器人编程与调试项目四工业机器人综合训练任务4 上下料工作站编程与调试3 1 2 目录contents402上下料工作站机器人编程与调试1、机器人的工作任务工装托盘到达工位1后,上位机系统发出启动命令。
PLC首先向机床发出调用程序命令;当数控车床返回已就绪命令后,PLC给机器人发出启动命令;机器人抓取工件1到达卡盘位置后,返回到位命令;PLC通知机床卡盘夹持;机器人推出到安全位置后PLC发出机床加工启动命令;加工完成后,PLC通知机器人夹持工件,夹持完成后命令机床卡盘松开;机器人将工件送至吹气清理位置,到达后PLC控制吹气顶销气缸顶出;机器人气爪松开移至安全位置后开始吹气;吹气完成后机器人返回夹持工件,夹持完成后PLC控制顶销气缸缩回;机器人将工件送至激光检测平台;平台夹持机构伸出、气爪夹紧,进行尺寸检测;检测完成后PLC通知机器人将工件放回工装托盘。
开始工件判断机器人为数控车床上下料机器人为清理单元上下料机器人为检测单元上下料铝制圆柱水晶机器人为视觉检测单元上下料启动抓取工件到达机床卡盘的位置,并向机床发出到位命令YN机床卡盘夹紧了加工完成机床卡盘松开可以清理清理完成铝制圆柱水晶机器人退至安全位置机器人人夹取工件,通知机床卡盘松开机器人夹取工件,退回安全位置,通知PLC 将机器人移动到清理单元将工件送到清理单元支撑台,气爪松开退回安全位置,通知清理机器人夹取工件,通知PLC 将机器人移动到检测单元机器人将工件送至激光检测平台,气爪松开移至安全位置,通知检测可以检测检测完成等待调用水晶工件的处理子程序调用铝制圆柱工件的处理子程序抓取水晶到达视觉检测点,气爪松开,退回安全位置,通知检测检测完成将工件放回工装托盘,退回安全位置,完成启动抓取工件到达机床卡盘的位置,并向机床发出到位命令YN机床卡盘夹紧了加工完成机床卡盘松开可以清理清理完成铝制圆柱水晶机器人退至安全位置机器人人夹取工件,通知机床卡盘松开机器人夹取工件,退回安全位置,通知PLC 将机器人移动到清理单元将工件送到清理单元支撑台,气爪松开退回安全位置,通知清理机器人夹取工件,通知PLC 将机器人移动到检测单元机器人将工件送至激光检测平台,气爪松开移至安全位置,通知检测可以检测检测完成等待调用水晶工件的处理子程序调用铝制圆柱工件的处理子程序抓取水晶到达视觉检测点,气爪松开,退回安全位置,通知检测检测完成将工件放回工装托盘,退回安全位置,完成(1)配置I/O板DSQC652(2)配置I/O信号(2)配置I/O信号机器人输入端子PLC输出端子功能DI10_1 Y410 启动DI10_2 Y411 判断铝座还是水晶DI10_3 Y412 机床卡盘卡紧,通知机器人松开工件并退回安全位置DI10_4 Y413 机床加工完毕,通知机器人下料DI10_5 Y414 机床卡盘松开,通知机器人可以取走工件DI10_6 Y415 机器人等待可以清理信号(机器人需到达清理单元前)DI10_7 Y416 等待清理完毕信号DI10_8 Y417 等待可以将工件放至检测处(机器人需到达检测单元前)DI10_9 Y418 等待工件尺寸检测完毕信号DI10_10 Y419 等待视觉检测完毕信号(2)配置I/O信号机器人输出端子PLC输入端子功能DO10_1,DO10_2 无机器人夹具控制DO10_3 X310 机器人准备就绪(在原位)DO10_4 X311 通知机床,机器人已经到了机床上料位置DO10_5 X312 机器人已经退回到安全位置,通知机床可以加工DO10_6 X313 机器人到达下料位置,通知机床卡盘需松开DO10_7 X314 通知PLC驱动行走轴让机器人走到清理单元前DO10_8 X315 机器人到达安全位置,发出通知,可以清理DO10_9 X316 通知PLC驱动行走轴让机器人走到检测单元前DO10_10 X317 机器人已经退至安全位置,通知可以进行工件尺寸检测DO10_11 X318 工件又放至托盘,完成DO10_12 X319 机器人到达安全位置,发出通知,可以进行视觉检测PROC main() Initialize; 初始化 WHILE TRUE DO ;进入循环 WaitDI DI10_1, 1; 等待启动命令 WaitTime 3;等待3s IF DI10_3 = 1 THEN yuanzhu; 调用铝制圆柱处理子程序 ELSE WaitTime 1; 等待1s shuijing; 调用水晶处理子程序 ENDIF ENDWHILE(1)主程序本程序中有初始化子程序、铝制圆柱处理子程序及水晶处理子程序。
数控车床上下料机器人工作站
一、解决方案
二、车削加工上下料机器人的集成 (一)、选用的机器人: 德国KUKAKR45工业机器人,具有45kg承载能力,机器人在加工点处的精度可 准确到0.15mm。 (二)、机器人的周边设备: 1、以PC为基础ቤተ መጻሕፍቲ ባይዱ库卡机器人控制系统KRC1,包括带有熟悉的视窗操作界面的 控制面板 2、机器人手爪:专为本应用设计的、带有可更换夹持器对钳口的三点夹持器 3、工件物流托架 4、传感器 5、机器人行走导轨 6、控制器 7、电气柜 8、安全围栏及安全门
数控车床上下料机器人工作站
提出要求
这是一家刀具的生产厂家,目前由人工操作车削中心,随着劳 动力成本的增加,客户想利用机器人自动上下料减少用工,同时 需处理的毛坯和成品刀具种类繁多,首先要求在机器人抓手时应 具有灵活性,还要求机器人具有稳定性和上下料的可靠性。
数控车床上下料机器人,可以替代人工实现车削加工单元的生产 线上的立式、卧式数控车床、车削中心在加工过程中工件搬运、 取件、装卸等上下料作业,以及工件翻转和工序转换。
三、项目成效
1、过程可靠性 通过机器人控制系统和机床控制系统之间快速无误的通讯,以及机器人在操作和 测量部件时的精度,可保证系统加工过程的可靠性。 2、改装时间短 用两对手动更换的夹持器对钳口为机器人进行快速改装,每对钳口相应覆盖毛坯 件直径带宽的一半。 3、生产效率提高 由于灵活性和过程可靠性的提高,在使用相同数量的员工情况下,生产效率得到 了明显提高。生产高精度刀具时,自动化程度的高低对企业来说也是一个很重要 的影响经济效益的因素。 4、精密度高 机器人在加工点处的精度可准确到0.15mm。能稳定可靠的将全部相关数据从机 床控制系统传送到以PC为基础的库卡机器人控制系统KRC1上,这也是进行精确 传送的前提条件之一。
T_14_O_F_FANUC机器人上下料工作站应用案例_加工(精)
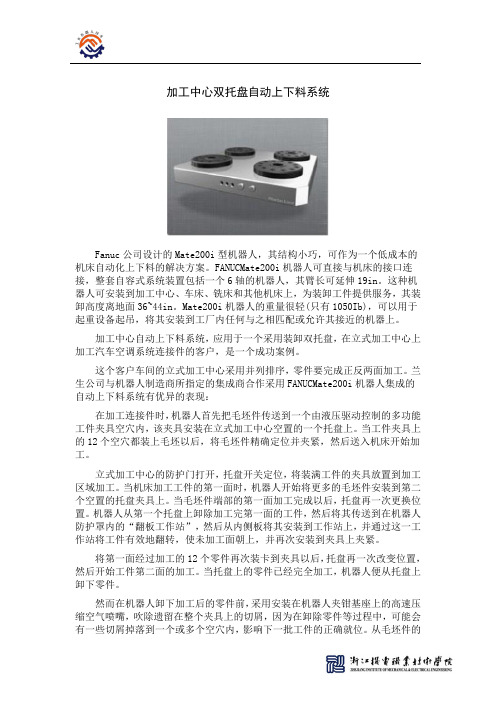
加工中心双托盘自动上下料系统Fanuc公司设计的Mate200i型机器人,其结构小巧,可作为一个低成本的机床自动化上下料的解决方案。
FANUCMate200i机器人可直接与机床的接口连接,整套自容式系统装置包括一个6轴的机器人,其臂长可延伸19in。
这种机器人可安装到加工中心、车床、铣床和其他机床上,为装卸工件提供服务,其装卸高度离地面36~44in。
Mate200i机器人的重量很轻(只有1050Ib),可以用于起重设备起吊,将其安装到工厂内任何与之相匹配或允许其接近的机器上。
加工中心自动上下料系统,应用于一个采用装卸双托盘,在立式加工中心上加工汽车空调系统连接件的客户,是一个成功案例。
这个客户车间的立式加工中心采用并列排序,零件要完成正反两面加工。
兰生公司与机器人制造商所指定的集成商合作采用FANUCMate200i机器人集成的自动上下料系统有优异的表现:在加工连接件时,机器人首先把毛坯件传送到一个由液压驱动控制的多功能工件夹具空穴内,该夹具安装在立式加工中心空置的一个托盘上。
当工件夹具上的12个空穴都装上毛坯以后,将毛坯件精确定位并夹紧,然后送入机床开始加工。
立式加工中心的防护门打开,托盘开关定位,将装满工件的夹具放置到加工区域加工。
当机床加工工件的第一面时,机器人开始将更多的毛坯件安装到第二个空置的托盘夹具上。
当毛坯件端部的第一面加工完成以后,托盘再一次更换位置。
机器人从第一个托盘上卸除加工完第一面的工件,然后将其传送到在机器人防护罩内的“翻板工作站”,然后从内侧板将其安装到工作站上,并通过这一工作站将工件有效地翻转,使未加工面朝上,并再次安装到夹具上夹紧。
将第一面经过加工的12个零件再次装卡到夹具以后,托盘再一次改变位置,然后开始工件第二面的加工。
当托盘上的零件已经完全加工,机器人便从托盘上卸下零件。
然而在机器人卸下加工后的零件前,采用安装在机器人夹钳基座上的高速压缩空气喷嘴,吹除遗留在整个夹具上的切屑,因为在卸除零件等过程中,可能会有一些切屑掉落到一个或多个空穴内,影响下一批工件的正确就位。
《上下料机器人工作站系统应用》课程标准

《上下料机器人工作站系统应用》课程标准一、课程定位该课程是工业机器人技术专业的核心课程,上下料机器人工作站系统是一门跨多个学科的综合性技术,它涉及了工业机器人、PLC、自动控制、视觉系统和数控机床等多种学科的内容,该课程的核心技能是上下料机器人工作站的设计、安装、调试、运行和维护应用技能,满足上下料机器人工作站系统岗位群的需要。
前导课程:《可编程控制器技术应用》、《工控组态与现场总线技术》、《工业机器人现场编程》、《工业机器人离线编程》等;后续课程:《顶岗实习》、《毕业设计》;二、课程目标1.知识目标1)熟悉工业机器人上下料工作站的组成;2)熟悉工业机器人上下料的方式与原理;3)掌握工业机器人上下料工装技术和检测技术;4)掌握工业机器人与外围设备的接口技术;5)掌握工业机器人工作站外围控制系统的应用;2.能力目标1)能根据具体应用选择工业机器人;2)能根据具体应用选择工业机器人工作站外围设备;3)能根据具体应用设计工业机器人与外围设备的接口电路;4)能调试PLC程序及机器人程序;5)能解决工业机器人工作站的常见故障;6)能看懂工业机器人技术手册;3.素质目标1)具有坚定正确的政治方向,热爱祖国,拥护中国共产党的领导;2)具有良好的职业道德和科学的创新精神;3)具有良好的心理素质与健康体魄;4)具有分析与决策能力;5)具有与他人合作、沟通,团队工作能力;6)具有发现问题,解决问题的能力;7)具有自我学习、追求进步不断超越能力;三、课程内容与要求四、教学条件1.师资队伍(1)专任教师担任本课程的主讲教师需要熟练掌握工业机器人及自动化技术应用的能力,同时应具备较丰富的教学经验。
在教学组织能力方面,本课程的主讲教师应具备基本的设计能力,即根据本课程标准制定详细的授课计划,对每一堂课的教学过程精心设计;还应具备较强的施教能力、课堂掌控能力和应变能力。
(2)兼职教师聘请有丰富实践经验和教学能力的企业工程技术人员为兼职教师,承担一定的实践教学、实习指导和课程评价等任务。
机器人上下料工作站实训系统设计
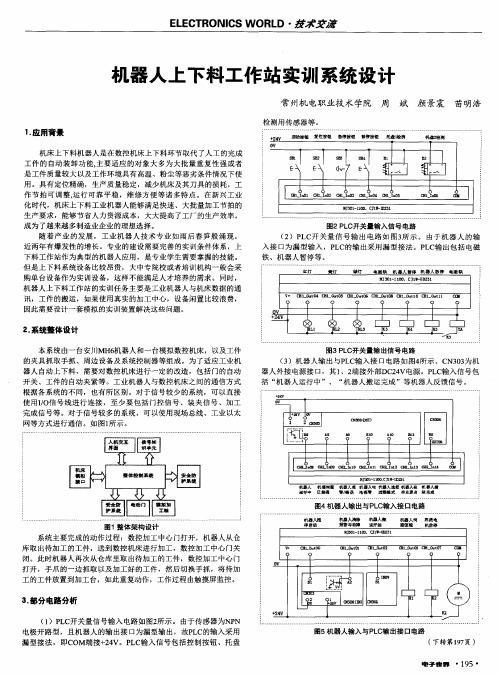
工 件 的 自动 装 卸 功 能, 主 要适 应 的对 象 大 多为 大 批 量重 复性 强 或 者 是工 件 质量 较大 以及 工 作环 境 具有 高温 、粉 尘 等恶 劣 条件 情况 下使 用 。具 有定 位精 确 ,生 产质 量稳 定 ,减 少机 床及 其 刀具 的损 耗 ,工 作 节 拍可 调 整 , 运 行 可 靠 平稳 ,维 修 方便 等 诸 多 特 点 。在 新 兴 工业 化时 代 ,机 床上 下料 工 业机 器人 能够 满 足快 速 、大 批量 加 工节 拍 的 生产 要求 ,能够 节省 人 力资 源成 本 ,大 大提 高 了工厂 的生产 效 率 , 成 为 了越 来越 多制 造业 企业 的理 想 选择 。 随着 产 业 的发 展 ,工 业 机 器 人 技 术 专业 如 雨后 春 笋 般 涌 现 , 近 两 年有 爆 发性 的增 长 。专 业 的建设 需 要完 善 的实训 条 件体 系 ,上 下料 工作 站作 为 典型 的机 器 人应 用 ,是 专业 学生 需要 掌 握 的技 能 。 但 是上 下料 系 统 设备 比较 昂贵 ,大 中专 院校 或者 培训 机 构一 般会 采 购 单 台设备 作 为实 训 设备 ,这 样不 能满 足 人才 培养 的需求 。同时 , 机器 人 上 下料 工作 站 的实 训任 务主 要是 工业 机 器人 与机 床 数据 的通 讯 ,工 件 的搬运 ,如果 使 用真 实 的加 工 中心 ,设 备闲 置 比较 浪费 , 因此 需 要设 计一 套模 拟 的实 训装置 解 决这 些 问题 。
2 . 系统整体设计
本 系统 由一 台安 川MH 6 机 器 人和 一 台模拟 数控 机床 ,以及 工件 的夹 具抓 取 手抓 、周 边 设备 及系 统 控制 器等 组成 。为 了适应 工业 机 器 人 自动 上 下料 , 需要对 数 控机 床进 行 一定 的 改造 ,包 括 门 的 自动 开 关 、工 件 的 自动夹 紧等 。工业 机器 人 与数 控机 床 之间 的通 信方 式 根 据各 系 统 的不 同 ,也有 所 区别 。对 于信 号 较少 的 系统 ,可 以直 接 使 用I / O信 号 线 进行 连 接 ,至 少 要 包 括 门控 信 号 、装 夹 信 号 、加 工 完 成信 号 等 。对 于信 号较 多 的系 统 ,可 以使 用现 场 总线 、工 业 以太 网等方 式进 行 通信 。如 图 1 所示。 Nhomakorabea搿
《上下料机器人工作站系统应用(FANUC模块)》教案

《上下料机器人工作站系统应用(FANUC模块)》教案项目一上下料工作站系统安全教育
项目二认识FANUC工业机器人上下料工作站任务一上下料工作站的应用与组成
项目一认识FANUC工业机器人上下料工作站任务二手动操作机器人上下料工作站运行
项目三FANUC工业机器人上下料工作站系统连接任务一上下料工作站系统整体电气设计
项目二FANUC工业机器人上下料工作站系统连接任务二熟悉CNC与机器人上下料工作站的硬件接口电路
项目四FANUC工业机器人上下料工作站系统程序设计任务一设定FANUC机器人系统
项目四FANUC工业机器人上下料工作站系统程序设计
任务二运行机器人应用程序
项目四FANUC工业机器人上下料工作站系统程序设计
任务三编写简单上下料程序
项目四FANUC工业机器人上下料工作站系统程序设计任务四FANUC机器人机器视觉的应用
项目五FANUC工业机器人上下料工作站系统维护与故障诊断任务一FANUC机器人系统文件的备份与工作站日常维护
21。
上下料工作站搭建与编程调试

上下料工作站搭建与编程调试介绍上下料工作站是一种自动化设备,用于实现物品的上下料、搬运和装配等工作。
本文档将介绍如何搭建和编程调试一个上下料工作站。
搭建步骤1:选择硬件设备在搭建上下料工作站之前,需要先选择适合的硬件设备。
这些设备包括:机器人臂、传感器、控制器等。
步骤2:安装机器人臂首先,将机器人臂安装在工作站设备上的支架上。
确保机器人臂的安装位置合适,并且固定牢固。
步骤3:连接传感器和控制器接下来,需要将传感器和控制器与机器人臂连接起来。
根据硬件设备的说明书,将传感器和控制器的电缆插入对应的接口。
步骤4:安装软件在搭建上下料工作站之前,还需要安装相应的软件。
根据硬件设备的说明书,下载并安装机器人臂和控制器的驱动程序。
步骤5:调试完成以上步骤后,上下料工作站的搭建就基本完成了。
接下来,需要进行调试。
首先,确保各个硬件设备的连接正常。
然后,打开控制器的软件,在软件界面上设置相关参数,使机器人臂能够准确执行上下料的动作。
编程调试步骤1:选择编程语言在编程调试上下料工作站时,需要选择合适的编程语言。
常用的编程语言包括C++、Python等。
步骤2:编写程序根据上下料工作站的功能需求,编写相应的程序。
程序主要包括机器人控制、传感器数据处理、上下料动作等部分。
步骤3:调试程序编写完程序后,需要进行调试。
通过调试程序,可以检查程序的逻辑是否正确,机器人的动作是否准确。
如果发现问题,需要及时修改程序。
步骤4:优化程序在调试的过程中,可能会发现一些问题或改进的地方。
根据实际情况,对程序进行优化,提高上下料工作站的效率和精度。
步骤5:测试完成编程调试后,需要进行全面的测试。
测试包括模拟实际工作环境,检查机器人的动作是否满足要求。
如果测试通过,就可以正式投入使用。
总结上下料工作站是一种自动化设备,通过机器人臂和传感器实现物品的上下料、搬运和装配等工作。
搭建和编程调试一个上下料工作站需要选择适合的硬件设备、安装和连接设备、安装软件、进行调试和测试等步骤。
《工业机器人CNC上下料工作站》教学大纲.

职业教育工业机器人技术专业教学资源库
工业机器人
CNC上下料工作站教学大纲
《工业机器人CNC上下料工作站》课程教学大纲
一、课程基本信息
二、课程定位
工业机器人CNC上下料工作站是工业机器人技术专业核心课程,该课程主要包括工件自动识别系统、机器人运行轨迹编程、上下料工作台外围设备等,使学生掌握工业机器人系统组成、系统在线编程的方法,为后续的工作站系统集成、工作站系统综合调试等能力培养打下基础。
三、课程目标
1.知识目标
1)熟悉工业机器人的操作安全知识;
2)熟悉工业机器人的种类和功能;
3)掌握工业机器人的系统构成;
4)掌握工业机器人坐标系相关知识;
5)掌握工业机器人功能指令相关知识;
6)熟悉工业机器人外围设备相关知识;
7)熟悉工业机器人系统备份的相关知识。
2.能力目标
1)能安全规范的操作工业机器人;
2)能看懂工业机器人技术手册;
3)能根据具体应用选择相应的机器人坐标系;
4)能对工业机器人系统程序进行备份恢复;
5)能熟练手动操作工业机器人;
6)能通过示教器对工业机器人进行编程控制;
3.素质目标
1)具有操作机器人必备的保证人身安全和设备安全相应素质,能遵守机器人使用手册的相关安全条款。
2)具备工业机器人应用中的6S管理的基本能力。
3)具备机器人运用环境的选泽、安全措施的采用
四、课程内容
五、教学内容
5
6
六、课程重点难点及解决方案
七、教学评价
十、其它说明
注释:对以上不能涵盖的内容作必要的说明。
注塑上下料机器人工作站.

注塑上下料机器人工作站注塑上下料机器人可以替代人工在比较恶劣的工作环境中,完成装入、取件等任务;可以根据不同的车间布局和工艺需要,将上下料机器人安装在地面支座和支架上;可以集成设计为一个注塑单元,也可以放在切割、装配、检测等塑料加工生产线上使用。
以下是为江苏常州的一家仪表盘注塑加工的厂商,想利用机器人替代人工,完成注塑取件和塑件贴膜的作业案例:注塑是一种工业产品生产造型的方法。
产品通常使用橡胶注塑和塑料注塑。
注塑还可分注塑成型模压法和压铸法。
塑料注塑是将熔融的塑料利用压力注进塑料制品模具中,冷却成型得到想要各种塑料件。
有专门用于进行注塑的机械注塑机。
目前对机械注塑机的取件,大多采用人工的方法。
在江苏常州的一家仪表盘注塑加工的厂商,想利用机器人替代人工,完成注塑取件和塑件贴膜的作业。
一、解决方案根据客户情况,采用日本FANUC机器人。
将FANUC机器人集成为注塑取件和塑件贴膜的机器人工作站。
手臂装有气动夹爪和真空吸盘,真空吸盘吸取仪表盘贴膜,进行冲压贴膜的上料,气动夹爪抓取注塑完成的仪表盘,进行注塑机床的下料,手爪切换自由,提高工作效率。
整个工作站都能实现机器人、机床、上料工作台和下料皮带轮的互相通讯,并有强制互锁程序,以确保人和机器人以及其他设备之间不会发生任何碰撞。
二、注塑自动化加工机器人的集成(一)、选用的机器人:FANUC Robot M-20iA型六轴机器人。
20公斤最大负重,地面安装,1811mm有效动作范围。
紧凑型机身设计,腕关节处无马达。
6轴关节运动,所有轴都使用RV减速机。
高可靠性的FANUC伺服系统为实现长久高效的生产保驾护航。
更长的维护间隔周期及有效工作时间意味着更低的使用成本。
伺服马达按照IP54防护等级罩壳保护,可防尘,防雾,防高温。
(二)、机器人的周边设备:1、机器人行走导轨:1套2、伺服旋转式上下料输送机(包括压紧手柄装置1套):1套3、气动夹爪:1套4、真空吸盘:1套5、系统控制柜:1套6、安全围栏:1套7、人员进出安全门开关:1扇。
冲压上下料机器人工作站.

冲压上下料机器人工作站针对冲压加工的高速度、快节奏工艺特点,而集成的冲压上下料机器人和多功能输送工作站,可以替代人工完成单台压机,串联、并联和冲压生产线上各道工序之间的工件输送危重工作。
其中包括拆垛、对中、多向输送、下料和上架等多种任务。
以下是为冲压件厂商提供的冲压上下料机器人的解决方案:冲压加工是借助于常规或专用冲压设备的动力,使板料在模具里直接受到变形力并进行变形,从而获得一定形状,尺寸和性能的产品零件的生产技术。
生产中为满足冲压零件形状、尺寸、精度、批量、原材料性能等方面的要求,采用多种多样的冲压加工方法。
因此,冲压加工的节拍快、加工尺寸范围较大、冲压件的形状较复杂,所以工人的劳动强度大,并且容易发生工伤。
这是一家大批量生产冲压件的厂商,希望机器人替代人工上下料,实现自动化冲压加工。
根据要求,采用日本FANUC高速机器人。
R-1000iA采用串联机构,拥有可到达机器人背部和下方的广阔的动作领域。
因为将机器人的横向宽度减小到极限,所以可以贴近的邻接的机器人、夹具或者工件进行紧凑设置。
不仅能对应地面安装,还能对应顶吊安装。
从待机位置到工作位置的高速接近,以及短距离移动时的快速定位动作,能对缩短作业的循环时间做出巨大贡献。
使用最新的机器人控制装置R-30iA来进行控制。
可以利用包括内置视觉功能在内的各种智能化功能和网络功能。
二、冲压件搬运上下料机器人的系统集成(一)、选用的机器人:日本FANUC Robot R-2000iB、R-1000iA机器人。
可搬运重量为80kg~100kg,紧凑的机器人结构和优越的动作性能最适合于采用密集型布局的搬运作业。
(二)、机器人的周边设备:1、机器人行走导轨:1套2、真空吸盘:1套3、工件输送装置:1套4、供料仓:1套5、系统总控制柜:1套6、安全围栏:1套7、人员进出安全门开关:1扇。