基于PLC的大小球分拣系统设计_毕业设计论文
基于PLC的大小球分拣系统设计_毕业设计论文

基于PLC的大小球分拣系统设计摘要大、小球分拣传送以其对人们生活的积极影响特别是在工业上的普遍应用不断被人们所认识,作为可操控机械,它能够部分地代替人的劳动并能达到生产工艺的要求,遵循事先设定的步骤来完成工件的分拣传送,大大地节省了人类的劳动时间,更因其能适应复杂的环境,从而改善了人们的工作环境。
随着科技的不断发展,在工业领域其应用范围不断增加,并取得了一定的成果。
本课题设计了大、小球的分类选择传送系统,采用日本三菱公司的FX2N系列PLC,对机械臂的上下、左右移动以及对球的抓取和释放的运动过程进行控制。
我们利用可编程控制技术,并结合相应的硬件装置,来控制机械臂完成各种动作,实现大小球的分类选择传送。
关键词:PLC , 大小球, 机械臂, 原点显示目录第1章概述 (1)1.1选题背景 (1)1.2可编程控制器介绍 (1)1.3控制要求 (2)第2章硬件设计 (3)2.1 主电路设计 (3)2.2 I/O地址分配及接线图 (4)2.3 元件的选择 (5)第3章软件设计 (7)3.1系统流程图 (7)3.2顺序功能图 (8)3.3梯形图和指令表 (9)3.4程序分析 (1)第4章软硬件调试 (1)4.1系统调试 (1)4.2 使用说明 (2)结论 (2)设计感想 (3)参考文献 (3)第1章概述1.1选题背景大、小球选择分类传送作为工业中器件选择传送的一个写照,在工业控制中它的应用领域不断拓宽。
它能够通过编程来完成各种预期的作业任务,并能在各种复杂环境中工作,在构造和性能上兼有人和机器各自的优点,尤其在人工智能方面大大地增加其效率,同时也改善了人类的工作环境与工作强度。
中国在科技发展方面发展水平较低,在工业中分拣传送劳动密集型还占有相当大的份额。
由于人的劳动能力有限,并且人不能持续长时间的高强度工作,因此在劳动效率上往往是制约企业发展的关键性因素,为了提高劳动效率,抢占市场份额,各个企业也不断的引进和更新自动化设备来提高效率,同时降低人的工作强度。
基于PLC的自动分拣控制系统开发设计实现—大学毕业论文毕业设计学位论文范文模板参考资料

摘要分拣控制系统在社会各行各业如:物流配送中心、邮局、采矿、港口、码头、仓库等行业得到广泛运用,分拣系统能够大大提高企事业单位该环节的生产效率。
本文在对熟悉了自动及分拣系统的原理的基础上,根据一定的分拣要求,对材料分拣进行了以三菱PLC为控制核心,MCGS组态软件为监控软件,设计出材料分拣控制系统的控制系统和监控系统。
该材料分拣系统以PLC为主控制器,结合气动装置、传感器技术、组态监控等技术,可以进行现场控制产品的自动分拣。
系统具有自动化程度高、运行稳定、分拣精度高、易控制的特点,对不同的分拣对象,稍加修改本系统即可实现要求。
对本系统完成其设计之后,进行了整体调试。
在硬件部分,调试其各部分安装的位置及角度,使其材料物块的运行与传感器安装的角度适合。
将硬件各部分的动作幅度进行调试之后,进行了软硬件综合调试,实现材料分拣系统中上料、传送与分拣的全过程。
关键词:材料分拣传感器气动装置 PLC MCGS组态软件Abstract:Sorting control system in all sectors of society such as: logistics and distribution center, post office, mining, ports, terminals, warehouses and other industries are widely used, we can see that the sorting system can greatly improve the level of production enterprises efficiency.Familiar with the goods in the automatic and sorting system principle foundation, according to certain request to sort the mitsubishi PLC as control core, Mcgs software for monitoring software, the design gives material sorting control system. The transport of goods and materials sorting system mainly by PLC controller, combined with pneumatic device, the sensor technology, configuration and monitoring technology, on-site control product automatic sorting. System has a high degree of automation, stable operation and high precision, easy control sorting based on the features of different sorting object, slightly modifying the system can be realized requirements.After completed its design of the system, executing the overall commissioning. In hardware, testing the installation location and angle of the various parts to make it run the block material and the angle of the sensor suitable for installation. After the various parts of the hardware debug range of motion, integrating hardware and software debugging to achieve material sorting system, feeding, delivery and sorting of the entire processKey words: Material sorting sensor Pneumatic device PLC Mcgs software.目录摘要 (I)Abstrac t: (II)1 绪论 (1)1.1 分拣系统基本介绍 (1)1.2 分拣系统的意义 (3)1.3 本文研究的主要内容 (4)2 分拣系统中硬件设计 (6)2.1PLC的选型 (6)2.1.1PLC的分类 (6)2.1.2 PLC种类及型号选择 (7)2.2 传感器的选择 (7)2.2.1传感器的简介 (7)2.2.2传感器的选择 (8)2.3 驱动部分的分析与选择 (10)2.4 执行机构的选择 (11)2.5 硬件设计及实际模型的建立 (12)2.6 其他元器件及其选择 (13)2.7I/O口的选择及PLC接线 (15)3 自动分拣系统的软件设计 (17)3.1可编程控制器(PLC)简介 (17)3.2 分拣系统的控制要求及其流程图 (19)3.3 软件设计及编程 (21)3.4 材料分拣系统的调试 (25)4 监控画面的设计 (31)4.1 组态控制技术 (31)4.2 模型的建立 (32)4.3 动画连接 (33)4.4 数据报表输出 (37)4.5PLC与组态软件之间的通信 (38)5 结论与展望 (44)参考文献 ...............................错误!未定义书签。
基于PLC的机械手分选大小球~完成版本3

高等教育自学考试毕业论文基于PLC的机械手分选大小球的自动控制主考学校:武汉工业学院专业:机电一体化工程指导老师:胡江萍考生姓名:姚世洪准考证号: 0180082003342011年9月 25 日目录第一章 PLC可编程控制器概述 (3)1.1 PLC可编程控制器的定义 (3)1.2PLC可编程控制器的特点 (3)1.3 PLC可编程控制器的趋势与动向 (5)第二章 PLC可编程控制器的原理 (6)2.1 PLC可编程控制器的组成 (6)2.2 PLC可编程控制器工作原理 (8)2.3 PLC可编程控制器系统设计参考 (9)第三章 PLC在大小球分选系统中的设计 (12)3.1 分选大小球控制系统的工作原理 (12)3.2 分选大小球控制系统的输入/输出地址及定时器分配 (13)3.3 分选大小球控制系统的接线图 (14)3.4 分选大小球控制系统的状态流程图 (15)3.5 分选大小球控制系统的梯形图 (17)3.6 分选大小球控制系统的程序图 (18)总结 (19)致谢 (20)参考文献 (21)摘要机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件。
机械手在先进制造领域中扮演着极其重要的角色,它可以搬运货物、分选物品、代替人的繁重劳动。
随着工业自动化、机械化进程的加速,自动控制正在逐步取代传统的人工控制,在改善工作人员工作环境的同时也使生产效率大大的提高,能够最大限度地满足被控对象和生产过程的控制要求。
因此被广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
本次毕业设计任务是通过PLC实现机械手分选大小球的自动控制。
论文主要对PLC可编程控制器的概述、特征、大小球分选自动系统中的设计进行具体阐明,并通过PLC来实现大小球分选系统的控制。
设计中采用日本三菱公司具有高性价比的微型可编程控制器FX2系列PLC,实现自动分选大小球的控制系统。
系统充分利用了可编程控制器(PLC)多方面的设计知识和方法,精确的实现了机械手从圆点下降、抓取、上升、右行、下降、释放、上升、左行还原等一系列的动作,完成一整套。
基于PLC的大小球分拣系统设计
出端口上搭建一个 H 桥来实现控制电机的左转和右转。将原
理调试好的程序改写成有两个端口输出来控制电机的右转, 即现在采用的Y10、Y12控制电机右转。同样采用Y11、Y13控
制电机的左转。
控制小球移动的主要功能梯形图中,当下限位闭合的时 候,机械臂将会走小球分支,让置位线圈 S22 得电,电磁铁 开始吸小球,并且Y3的闭合,使到与组态连接的M103得电, 同时与组态进行实时的数据监控,时间继电器T1开始计时时 间为1S。对部分指令程序调试如下1.3所示。
2.设计内容
当输送机处于起始位置时,上限位开关和左限位开关开 关处于闭合的状态,原位指示灯此时闪亮。启动装置后,捡
球装置下行。如果电磁铁碰到大球时上限位动作,而下限位
开关不动作;如果电磁铁碰到小球时下限位开关动作。电磁 铁下降后电磁铁吸球,吸到球后上升,到上限位后机械臂右 移动。如果吸的是小球,则机械臂到小球位,电磁杆下降, 电磁铁失电释放小球到小球的箱子。如果吸取的是大球,则
机械臂到大球位,电磁杆下降,电磁铁失电释放大球到大球
的箱子。吸起小球后,则捡球装置向上行,碰到上
限位开关后,捡球装置向右行;碰到右限位开关(小球
的右限位开关)后,再返回到原位。如果吸起的是大球,捡 球装置右行碰到另一个右限位开关(大球的右限位开关)后, 再向下行,碰到下限位开关后,将大球释放到小球箱里,然 后返回到原位。 然而,在设计机械臂的时候,左限位、小球限位开关和 大球的限位开关的放置,影响到机械臂的移动是否能够触及
到限位开关。所以要对电机上的位置,选定好要设计的左限
位开关、小球限位开关、大球限位开关。并能按照给定的程 序,机械臂能够及时的碰及到限位开关,能够更好的控制好 大小球的分拣。
大小球分拣系统示意图如图1.1所示。
基于PLC的自动分拣系统设计

4.1 硬件调试··········································23
4.2 软件调试··········································23 www.dociXXXXXX 毕业设计 IV 4.3 整体调试···········································23 结 论·········································24
致 谢·········································25 参考文献······································26
附录 PLC程序 ································27 www.docin.comXXXXXX 毕业设计 1 绪 论 分拣是把很多货物按品种从不同的地点和单位分配到所设置的场地的作业。按 分拣的手
2.2.3 PLC 的 I/O分配···································4 2.2.4 PLC输入输出接线端子图···························5
2.3 检测元件与执行装置的选择····························6
【《基于plc的自动分拣系统》4400字(论文)】
基于P1C的自动分拣系统目录引言2第一叠P1C控制系统整体设计方案 (2)1.1 P1C的三大特色 (2)1.1.1 最主要特点是抗干扰能力强,可靠性高 (2)1.1.2 适应性强且功能逐渐完善,同时兼并方便使用的功能 (3)1.1.3 设计优势是工作量小和便于维护 (3)1.2 智能系统运行原理 (3)工作过程大约如下图2所示: (3)P1C的梯形控制流程如下图3所示: (5)1.3 P1C系统设计 (5)1.3.1 对DO数量的确定: (5)132变频器的选择及工作原理: (5)下图为变频器与相关电机的接线: (6)1.4 检测和执行机制的选择(即旋转编码器和传感器的选择) (6)14.1旋制式编码器: (6)14.2感应式传感器: (7)14.3色彩传感器: (7)第二章系统调试 (8)2.1相关硬件调试方法: (9)2.1.1 调试电感传感器 (9)2.1.2 调试电容传感器 (9)2.1.3 调试颜色传感器 (9)2.2软件调试 (9)2.310参考文献........................................................... H引言在物料搬运系统中存在智能分拣系统这个分支系中,能够为后续机械化操作打下可靠的基础。
不仅在化工、电气行业得到了应用、近期在制药行业也逐渐兴起。
目前,由于目前市场上自动化分拣设备前景良好,再加上人力成本的逐年上升趋势,智能P1C更新速度愈发迅速。
众所周知,P1C以其灵活可靠、易于扩展、通用性强等特性,逐渐成为自动化生产领域的主控设备之一。
本次论文结合变频技术、遥感技术等,来进行最终的设计。
第一章P1C控制系统整体设计方案1.1P1C的三大特色1.1.1最主要特点是抗干扰能力强,可靠性高传统的继电器■接触器控制系统由于使用了大量的机械触点,使得存在良好的抗干扰能力,但由于设备之间的接线比较复杂,而且由于设备的老化,触点脱焊、抖动,在分合闸时触点会被电弧损坏,同时由于机械触点之间容易出现接触不良的状况,会使得出现故障的可能性提高,从而大大降低了系统的可靠性。
基于PLC的球形水果大小自动分拣系统设计

基于PLC的球形水果大小自动分拣系统设计摘要:随着经济的发展,目前我国水果产业在水果产量和品质逐年递增的情况下,总的收入却一直提不上来的主要原因是我国的水果产后处理水平不足。
与众多产后处理流程比如上线、清洗、打蜡、烘干等较为容易实现的操作相比较,水果的分拣相对复杂,其技术也是水果产后处理的关键。
目前的水果分拣技术有的较为简单无法满足精细分拣的需要,有的较为复杂,成本较高。
关键词:PLC;球形水果;大小;自动分拣系统;设计引言自动分拣系统作为先进操作工具,其分拣速度较快,能够有效提高物流配送效率,帮助工作人员实现大批量以及连续性的货物分拣。
在大规模生产过程中,采用自动分拣流水线工作方式,可以不受人工、时间以及气候等影响,实现连续工作,提升工作效率。
自动分拣系统虽能够有效地分拣货物,但需要在分拣之前设置输入程序,而相对于水果这种表面有可能存在损坏的物品,仅使用自动分级分拣系统,无法对其实行有效分拣。
为此,如何提升产品无损分拣成为该领域研究的热点问题。
1项目来源随着我国经济的快速发展,许多中、大型农业户,中、大型企业蓬勃发展,使水果产量持续增加。
近年来,互联网行业的兴起,水果行业“直播带货”已然成为一种潮流。
伴随我国贸易量逐年上升,水果商品化的要求也日益增加。
但我国水果参与国际贸易的比例一直很低,出口量不到国际水果贸易的5%,这一现状不能很好地推动我国水果产业走向世界,经研究发现其中一个重要原因就是我国水果商品化处理技术的落后,使得水果品质和口感直线下降,从而水果的收益大打折扣,也导致国内的水果很难走出去,在国际市场所占比重较小。
本团队为解决以上问题,结合国内现有的技术,设计研发了基于图像识别产品分拣系统。
该设备能够很好地实现水果生产走向商品化的过程,带来了更高的经济收益。
目前,我国关于PLC技术的智能化分拣机器目前市场上还没有技术成熟且安全高效的产品,本项目产品的问世更好的弥补了市场空缺。
2PLC控制的分拣系统设计为了更好地将水果进行分拣,分拣系统的设计主要以功能模块的实现为主。
PLC物料自动分拣系统毕业论文
毕业设计(论文)题目:物料自动分拣系统教学院:电气与电子信息工程学院专业名称:电气工程及其自动化学号:学生姓名:指导教师:年月日摘要PLC技术,控制起来非常简便,并且它能够承受高温及其他的恶劣的环境条件,所以plc比起单片机来,工业上优先使用plc,它已经成为了当代工业流水线和企业最受欢迎的自动化控制方法。
PLC技术融合了传统的继电控制技术,现代的计算机技术,以及发达的通信技术,专门为了工业应用和工厂设备而设计。
并且具有:使用方便,编程简单,功能强,性价比高,可靠性强,抗干扰能力强,适应性强,后期处理、维修简单方便等诸多优点,比起单片机来更加可靠与实用,这就是人们选择plc的“内”因.再加上plc小巧的外形包装,超低的重量,和超小的功耗这些“外”因,使得plc越来越受工业企业的推崇与喜爱。
本文论述物料自动分拣系统,主要应用PLC技术,辅助以启动装置,位置技术,现场总线技术,电机拖动原理,电气传动技术,传感技术,自动检测技术等设计而成,对大批的物料进行自动分拣的工作,完成分门别类的放置物料.本系统具有很多的优点,例如,运行起来比较稳定,精度与敏捷度,自动化的程度都很高,而且非常便于使用和控制,如果你想使用它来分装另一批货物的话,只需要动动手指,对本系统稍加修改,对本程序稍作处理即可。
关键词:plc;可编程控制器;分拣装置系统;控制系统;感应系统ABSTRACTPLC technology,control is very simple, and it can withstand high temperatures and other harsh environmental conditions, so PLC than SCM,industry give priority to the use of PLC, it has become the automatic control method of the most popular contemporary and industrial assembly enterprises。
基于PLC的球形水果大小自动分拣系统设计
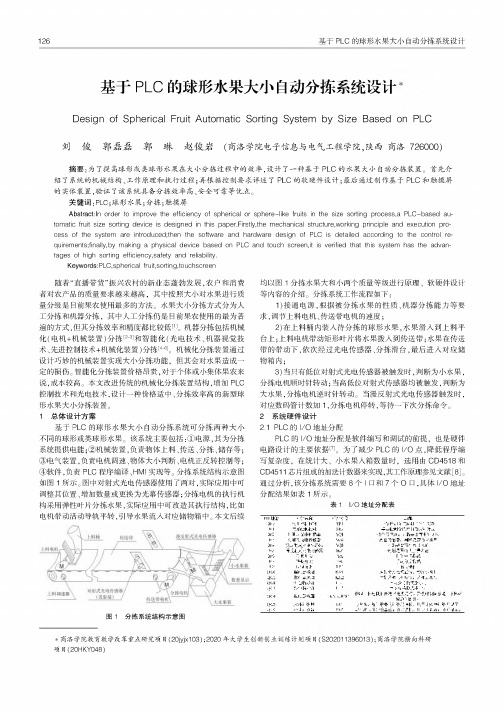
126基于PLC的球形水果大小自动分拣系统设计基于PLC的球形水果大小自动分拣系统设计Design of Spherical Fruit Automatic Sorting System by Size Based on PLC 刘俊郭磊磊郭琳赵俊岩(商洛学院电子信息与电气工程学院,陕西商洛726000)摘要:为了提高球形或类球形水果在大小分拣过程中的效率,设计了一种基于PLC的水果大小自动分拣装置。
首先介绍了系统的机械结构、工作原理和执行过程;再根据控制要求详述了PLC的软硬件设计;最后通过制作基于PLC和触摸屏的实体装置,验证了该系统具备分拣效率高、安全可靠等优点遥关键词:PLC;球形水果;分拣;触摸屏Abstract:"order to improve the efficiency of spherical or sphere-like fruits in the size sorting process,a PLC-based automatic fruit size sorting device is designed in this paper.Firstly,the mechanical structure,working principle and execution process of the system are introduced;then the software and hardware design of PLC is detailed according to the control re-quirements;finally,by making a physical device based on PLC and touch screen,it is verified that this system has the advantages of high sorting efficiency,safety and reliability.Keywords:PLC,spherical fruit,sorting,touchscreen随着“直播带货”振兴农村的新业态蓬勃发展,农户和消费者对农产品的质量要求越来越高袁其中按照大小对水果进行质量分级是目前果农使用最多的方法。
基于PLC的物料自动分拣系统设计毕业设计

基于PLC的物料自动分拣系统设计毕业设计摘要:随着物流业的发展,自动分拣系统在物料仓储和配送方面起着重要的作用。
本文设计了一种基于可编程逻辑控制器(PLC)的物料自动分拣系统。
该系统通过搬运装置和传感器进行物料的识别和分拣,并利用PLC来控制整个分拣过程。
通过使用PLC,可以实现自动化、高效和准确的物料分拣。
本文还对系统的硬件和软件实现进行了详细的介绍,并进行了系统的测试和评估。
实验结果表明,该系统具有较高的可靠性和分拣准确性。
1.引言物流行业是现代经济的重要组成部分,随着电子商务和电子零售的兴起,物流需求也日益增长。
物料的快速、准确和高效分拣对于满足市场需求至关重要。
然而,传统的人工分拣工具费时费力,人工成本高。
因此,自动分拣系统具有重要意义。
2.系统设计2.1系统架构本系统采用基于PLC的物料自动分拣系统。
系统架构包括四个主要模块:传感器模块、搬运装置模块、PLC模块和控制台模块。
2.2传感器模块传感器模块用于对物料进行识别和检测。
常用的传感器包括光电传感器、摄像头和压力传感器。
这些传感器通过检测物料的形状、颜色、大小等特征,将物料识别为不同的类别。
2.3搬运装置模块搬运装置模块用于将被识别的物料从输入端搬运到输出端。
该模块可以使用输送带、机械臂等搬运设备。
2.4PLC模块PLC模块用于控制整个物料分拣系统的运行。
它可以接收传感器模块发出的信号,根据程序逻辑进行判断和控制,并输出控制信号给搬运装置模块。
2.5控制台模块3.硬件和软件实现硬件方面,本系统采用了PLC、光电传感器、输送带和工作台等设备。
软件方面,使用PLC编程软件进行程序的编写和调试。
4.系统测试和评估通过对系统的功能和性能进行测试和评估,可以评估系统的稳定性、准确性和效率。
在测试中,我们使用了一定数量的不同类别的物料进行分拣。
实验结果表明,系统能够准确识别和分拣物料,并且具有高效率和稳定性。
5.结论基于PLC的物料自动分拣系统是一种自动化、高效和准确的物料分拣解决方案。
基于PLC的机械手自动分选大小球设计_毕业设计概述
S0.0 SM0.0 M0.1 左行:Q0.0, 1 上行:Q0.2, 1 SM0.0
左限位:I1.0 左行:Q0.0, 1
上限位:I1.2 上行:Q0.2, 1 左限位:I1.0 上限位:I1.2 右行:Q0.1, 1 M0.1, 1 计数PLS:I1.4 右行:Q0.1 SM0.1 C0, 20 C0 右行:Q0.1, 1
6、逻辑结果取反指令NOT
7、接通延时定时器指令TON(On-Delay Timer)
8、递增计数器指令CTU(Counter Up)
9、SCR指令
1 段开始指令LSCR(Load Sequence Control Relay)
2 段转移指令SCRT(Sequence Control Relay Transition)
机械手虽然目前还不如人手那样灵活,但它具有能不断重 复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手 大等特点,因此机械手已受到许多部门的重视,并越来越广泛 地得到了应用。
机械手传送示意及操作面板图
气动机械手实验装置原理图 1 左右移动气缸 2 复位进退气缸 3 升降气缸 4 真空吸盘 5 物料块 6 传感器 7 圆柱导轨 8 支架 9 底座
可编程控制器PLC简介
可编程控制器PLC:Programmable Logic Controller
美国国际电工委员会(IEC)在1987年对可编程序控制器做出 如下定义:可编程序控制器是一类专门为在工业环境下应用而设 计的数字式电子系统,它采用了可编程序的存储器,用来在其内 部进行存储执行逻辑运算、顺序运算、定时、记数和算术运算等 功能的面向用户的指令,并通过数字式或模拟式的输入或输出 ,控制各种类型的机械或生产过程。可编程控制器及其相关外部 设备,都应按照易于与工业控制系统联成一个整体,易于扩展其 功能的原则而设计。
基于PLC的大小球分拣系统设计

基于PLC的大小球分拣系统设计大型物流仓库中,大小球分拣系统可以提高物流效率,减少人工操作,实现自动化分拣。
本文将基于可编程逻辑控制器(PLC)设计一个大小球分拣系统。
1.系统结构设计:大小球分拣系统的基本结构包括输送带,PLC控制器,感应器,气动执行机构,大小球分拣装置和人机界面等。
2.硬件设计:(1)输送带:设计多个平行的输送带,用于将大小球从起始点送往目标点。
(2)感应器:通过光电传感器或其他感应器检测输送带上的大小球,将信号传输给PLC控制器。
(3)气动执行机构:根据PLC控制信号,控制气缸的伸缩,实现大小球的分拣。
(4)PLC控制器:作为系统的主控制器,接收感应器的信号,根据程序逻辑控制气动执行机构的动作,实现大小球的分拣。
(5)大小球分拣装置:分为两个部分,一个用于分拣大球,另一个用于分拣小球。
大球分拣装置包括气缸和分拣槽,小球分拣装置也是类似的结构。
(6)人机界面:通过触摸屏或按钮等设备,实现对系统的监控和控制。
3.软件设计:(1)PLC编程:使用PLC编程软件,编写逻辑控制程序。
程序包括事件触发、数据处理、状态转换、运行控制等模块。
(2)分拣规则设计:根据实际需求,设计分拣规则,如大球分拣到左边,小球分拣到右边。
(3)报警系统设计:设计异常报警系统,如感应器异常、气动执行机构异常等,及时发出警报并记录异常信息。
4.工作流程:(1)起点:大小球从起点进入输送带,由感应器检测到信号发给PLC控制器。
(2)PLC控制器:根据感应信号触发相应的控制程序,判断大小球的类型。
(3)气动执行机构:根据PLC控制信号控制气缸伸缩,将大小球分拣到相应的分拣装置中。
(4)分拣装置:大球分拣装置将大球分拣到左边,小球分拣装置将小球分拣到右边。
(5)目标点:经过分拣,大小球分别到达目标点,等待下一步操作。
5.系统优势:(1)高效性:使用PLC控制,实现自动分拣,提高分拣速度和效率。
(2)准确性:通过感应器和PLC控制器,实现准确的分拣,避免人工操作带来的误差。
PLC物料自动分拣系统毕业论文
PLC物料自动分拣系统毕业论文目录一、摘要 (2)1. 研究背景 (2)2. 研究目的 (4)3. 研究方法 (4)4. 研究结果 (5)5. 研究结论 (6)二、关键词 (7)三、内容简述 (8)1. 研究背景与重要性 (9)2. 国内外研究现状 (10)3. 研究目标与意义 (12)4. 论文结构 (13)四、PLC物料自动分拣系统的基本概念 (14)五、系统设计与实现 (15)1. 系统设计原理 (17)2. PLC硬件配置及选型 (19)3. 软件编程与实现 (20)4. 系统调试与优化 (22)六、系统功能模块详解 (24)1. 物料识别模块 (25)2. 自动分拣模块 (27)3. 信息管理模块 (28)4. 异常处理模块 (30)七、实验与验证 (32)1. 实验环境准备 (34)2. 实验流程描述 (35)3. 实验数据与结果分析 (36)八、理论分析与讨论 (38)1. 系统运行效率分析 (39)2. 物料分拣准确性讨论 (40)3. 系统成本效益分析 (41)九、结论与展望 (43)1. 研究结论 (44)2. 创新点与不足 (44)3. 未来研究展望 (45)一、摘要随着工业自动化程度的不断提高,物料分拣环节的自动化需求日益迫切。
本文研究了基于PLC的物料自动分拣系统的设计与实现。
首先介绍了物料分拣系统的工作原理和结构组成;随后分析了PLC控制的特点和优势,并结合系统设计需求选定了具体的PLC型号以及编程语言。
针对实际应用场景,设计了基于上位机控制、下位机执行的系统控制逻辑,并对分拣过程的每一步进行详细的控制算法分析和编程实现。
实验验证结果表明,该能够自动识别、分拣不同类型的物料,具有高效率、可靠性和可扩展性,能够有效提高生产效率和降低人工成本。
本文针对未来的研究方向进行了探讨,包括增加物料识别精度、扩展分拣能力等。
1. 研究背景随着自动化技术的发展和应用,PLC(可编程逻辑控制器)系统在工业生产中扮演着越来越重要的角色。
基于PLC的机械手大小球分拣控制设计

November 2015 PACKAGING 67学术天地PROCESS AND DESIGN ·材料与设备引言在生产过程中,经常要对流水线上的产品进行分拣,为了提高生产效率,本设计拟开发机械手物料分拣控制系统。
采用德国西门子S7-200系列PLC,对机械手分拣大小球的运动进行控制。
1 机械手物料分拣控制系统设计1.1 控制要求(1)初始状态:机械手在原点,压下上限位开关和左限位开关,抓球电磁铁处于失电状态,原点指示灯亮;(2)有启动按钮和停止按钮控制运行,设停止时机械手必须回到原点;(3)启动后,机械手工作顺序为:下行至下限→吸球1s→上行至上限→右行至右限→下行至下限→ 释放1s→上升至上限→左行至左限进行下一次循环;(4)吸球时,如果吸住小球,大小球检测开关为ON;如果吸住大球,检测开关为OFF;机械手右行时有小球右限位和大球右限位之分。
1.2 I/0分配机械手大小球分拣装置I/0分配表如下表所示。
1.3 PLC选型从上面的分析可知,有开关量输入点8个,输出点6个,选用S7—200系列的CPU224CN。
1.4 顺序功能图设计顺序功能图如图所示,由于大小球不同,所以用选择序列使机械手能够在右行后在不同的位置下行,把大小球分别放进各自的箱子里去。
M0.0是选择逻辑电路,由I0.0和I0.1组成的起保停电路,决定系统是进行单周期操作还是循环操作。
结语本文以西门子S7-200 PLC为基础,对机械手大小球分拣控制系统进行设计,通过对控制要求的分析对I/O进行分配,设计顺序功能图并将其转化为梯形图,进行上机模拟调试,调试结果显示能够按照控制要求进行机械手大小球分拣控制。
基于PLC的机械手大小球分拣控制设计杨海兰(甘肃畜牧工程职业技术学院,甘肃 武威 733006)【摘 要】采用西门子S7-200系列PLC对机械手的上下、左右以及抓取运动进行控制,设计一种用于大小球分拣的机械装置,具体设计了控制系统的顺序功能图。
基于PLC的自动控制分拣系统的设计毕业论文
基于PLC的自动控制分拣系统的设计毕业论文目录摘要.............................................. 错误!未定义书签。
目录. (I)绪论 (1)第1章材料分拣装置结构及总体设计 (3)1.1材料分拣装置工作过程概述 (3)1.2系统的技术指标 (4)1.3系统的设计要求 (5)第2章控制系统的硬件设计 (7)2.1系统的硬件结构 (7)2.2系统关键技术 (7)2.3检测元件与执行装置的选择 (10)第3章控制系统的软件设计 (18)3.1控制系统流程图设计 (18)3.2控制系统程序设计 (19)第4章控制系统的调试 (25)4.1硬件调试 (25)4.2软件调试 (26)4.3整体调试 (26)结论 (27)致谢 (28)参考文献 (29)附录 (30)绪论分拣是把很多货物按品种从不同的地点和单位分配到所设置的场地的作业。
按分拣的手段不同,可分为人工分拣、机械分拣和自动分拣。
目前自动分拣已逐渐成为主流,因为自动分拣是从货物进入分拣系统送到指定的分配位置为止,都是按照人们的指令靠自动分拣装置来完成的。
这种装置是由接受分拣指示情报的控制装置、计算机网络,把到达分拣位置的货物送到别处的的搬送装置。
由于全部采用机械自动作业,因此,分拣处理能力较大,分拣分类数量也较多。
随着社会的不断发展,市场的竞争也越来越激烈,因此各个生产企业都迫切地需要改进生产技术,提高生产效率,尤其在需要进行材料分拣的企业,以往一直采用人工分拣的方法,致使生产效率低,生产成本高,企业的竞争能力差,材料的自动分拣已成为企业的唯一选择。
针对上述问题,利用 PLC 技术设计了一种成本低,效率高的材料自动分拣装置,在材料分拣过程中取得了较好的控制效果。
物料分拣采用可编程控制器PLC 进行控制,能连续、大批量地分拣货物,分拣误差率低且劳动强度大大降低,可显著提高劳动生产率。
而且,分拣系统能灵活地与其他物流设备无缝连接,实现对物料实物流、物料信息流的分配和管理。
毕业设计(论文)-分拣机器人PLC控制系统设计
毕业设计(论文)-分拣机器人PLC控制系统设计分拣机器人在现代物流领域扮演着重要的角色,能够代替人工完成繁重的分拣工作。
而PLC(可编程逻辑控制器)作为一种常用的自动化控制器,被广泛应用于工业控制系统中。
本文选题的背景是探讨分拣机器人PLC控制系统的设计,这一选题的选择具有以下原因和意义:自动化控制:分拣机器人的PLC控制系统能够实现自动化的分拣操作,提高效率和精度,减少人力资源的消耗。
系统集成:分拣机器人PLC控制系统需要涉及到多个组件和设备的互联,研究该系统的设计可以促进各个设备之间的无缝衔接和协作。
技术创新:分拣机器人PLC控制系统的设计面临着多种技术挑战,如路径规划、动作控制等,探讨这些挑战有助于提高分拣机器人的性能和可靠性。
通过对分拣机器人PLC控制系统设计的研究,我们能够更深入地了解分拣机器人的自动化控制原理和实现方法,为物流行业的自动化发展做出贡献。
二、研究目的与意义明确研究的目的和意义,说明分拣机器人PLC控制系统设计在实际应用中的重要性和潜在的价值。
分拣机器人在现代工业生产中扮演着重要角色,能够实现自动化的物料分拣任务。
PLC控制系统是分拣机器人工作的核心,它负责对机器人的动作和运动进行精确控制。
因此,对于分拣机器人PLC控制系统设计的研究具有一定的重要性和意义。
首先,通过研究分拣机器人PLC控制系统设计,可以提高分拣效率和准确性。
传统的手工分拣方式存在速度慢、错误率高的问题。
而通过合理设计PLC控制系统,可以实现对分拣机器人的精确控制,提高分拣速度和准确性,从而提高工业生产的效率。
其次,分拣机器人PLC控制系统设计的研究可推动工业自动化水平的提升。
随着工业智能化的发展,越来越多的企业开始引入分拣机器人来完成物料分拣工作。
而PLC控制系统作为分拣机器人的核心控制部件,其稳定性和可靠性直接影响着分拣机器人的工作效果。
因此,深入研究分拣机器人PLC控制系统的设计,可以提升工业自动化水平,推动工业智能化的进一步发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC的大小球分拣系统设计摘要大、小球分拣传送以其对人们生活的积极影响特别是在工业上的普遍应用不断被人们所认识,作为可操控机械,它能够部分地代替人的劳动并能达到生产工艺的要求,遵循事先设定的步骤来完成工件的分拣传送,大大地节省了人类的劳动时间,更因其能适应复杂的环境,从而改善了人们的工作环境。
随着科技的不断发展,在工业领域其应用范围不断增加,并取得了一定的成果。
本课题设计了大、小球的分类选择传送系统,采用日本三菱公司的FX2N系列PLC,对机械臂的上下、左右移动以及对球的抓取和释放的运动过程进行控制。
我们利用可编程控制技术,并结合相应的硬件装置,来控制机械臂完成各种动作,实现大小球的分类选择传送。
关键词:PLC , 大小球, 机械臂, 原点显示目录第1章概述 (1)1.1选题背景 (1)1.2可编程控制器介绍 (1)1.3控制要求 (2)第2章硬件设计 (3)2.1 主电路设计 (3)2.2 I/O地址分配及接线图 (4)2.3 元件的选择 (5)第3章软件设计 (7)3.1系统流程图 (7)3.2顺序功能图 (8)3.3梯形图和指令表 (9)3.4程序分析 (1)第4章软硬件调试 (1)4.1系统调试 (1)4.2 使用说明 (2)结论 (2)设计感想 (3)参考文献 (3)第1章概述1.1选题背景大、小球选择分类传送作为工业中器件选择传送的一个写照,在工业控制中它的应用领域不断拓宽。
它能够通过编程来完成各种预期的作业任务,并能在各种复杂环境中工作,在构造和性能上兼有人和机器各自的优点,尤其在人工智能方面大大地增加其效率,同时也改善了人类的工作环境与工作强度。
中国在科技发展方面发展水平较低,在工业中分拣传送劳动密集型还占有相当大的份额。
由于人的劳动能力有限,并且人不能持续长时间的高强度工作,因此在劳动效率上往往是制约企业发展的关键性因素,为了提高劳动效率,抢占市场份额,各个企业也不断的引进和更新自动化设备来提高效率,同时降低人的工作强度。
因而这种自动化控制在工业控制中有很大优势。
1.2可编程控制器介绍可编程控制器起源于20世纪60年代末期,70年代随着微处理器的出现,使其真正成为具有计算机特征的工业控制装置。
随着科技的不断进步,可编程控制器也更加适用于现代工业的需要。
可编程控制器未来主要朝着以下方向发展:进一步加快CPU处理速度;变革操作控制方式,以增加对输入输出快速反应能力;由整体结构向小型模块化结构发展,增加配置的灵活性,降低成本; 进一步系统提高可靠性。
1.3控制要求本次设计的大、小球分类选择传送PLC 控制要满足以下控制要求:机械臂起始位置在机械原点,为左限、上限并有显示;有起动按钮和停止按钮控制运行,停止时机械臂必须已回到原点; 起动后机械臂动作顺序为:下降→吸球→上升(至上限)→右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点);机械臂右行时有小球右限(X4)和大球右限(X5)之分,下降时,当电磁铁压着大球时下限开关X2断开,压着小球时下限开关X2接通。
图1.1 机械手分拣大小球的工作示意图++LS1LS3LS2LS4LS5电磁铁MPS0大小上行下行左行右行下限右限右限左限上限原点显示接近开关当吸住大球时,活塞未达到下限位置,LS2不动作第2章 硬件设计2.1 主电路设计大、小球分拣传送实质上是由电动机控制的机械臂完,其主电路就是电动机的正反转电路。
主电路电路图如图2-1所示。
M1M2FR1FR2FUKM1KM2KM3KM4L1L2L3QS图2-1 大、小球分类选择传送PLC 控制的主电路电路图2.2 I/O地址分配及接线图按照设计要求,我们设定好输入量与输出量,定义各个量的含义,并对它们进行地址分配。
本系统的I/O地址分配如表2-1所示。
表2-1 大、小球分类选择传送PLC控制的I/O地址分配输入输出X0启动按钮Y0原点显示X1左限位开关Y1下行X2下限位开关Y2上行X3上限位开关Y3右行X4小球右限位开关Y4左行X5大球右限位开关Y5吸球X6接近开关X14停止开关根据控制要求,设定好各个量的地址分配之后,我们把其对应的I/O接线图绘制出来,其I/O接线图如图2-2所示。
图2-2 大、小球分类选择传送PLC控制的I/O接线图2.3 元件的选择选按钮时,按照按钮的使用场合、控制回路要求、工作状态与工作情况等原则选择按钮。
其一般规格为交流500V,允许持续电流5A,红色按钮表示停止,绿色按钮表示启动。
根据这些我们选择实用的按钮。
行程开关有直动式、滚动式和微动式三种。
直动式行程开关结构简单,成本低,但容易烧蚀触头。
滚动式行程开关克服了直动式的缺点,但其结构复杂,价格也较高。
考虑到我们所做的系统比较小,我们选择体积小,动作灵敏,适用于小型机构的微动式行程开关。
接近开关是对接近它的物体有感知能力的一种位移传感器利用传感器对接近物体的敏感特性达到控制开关通断的目的。
通常分为霍尔接近开关,超声波接近开关,高频振荡式接近开关。
本设计中我们采用霍尔接近开关X6检测是否有球。
接触器主要用于远距离频繁接通和分断交直流主回路及大容量用电回路的低压控制电器。
根据负载特性、被控电路电流大小、被控电压等级以及控制电压等级等,我们选择交流电磁式接触器CJ12系列,它适用于交流50HZ,额定电压至380V,额定电流至600A 的电路。
本设计中电磁阀主要用于机械臂吸球与放球动作的控制,电磁阀线圈通电后产生电磁吸力将铁球吸住,线圈断电后,释放铁球。
电磁阀常用于机械控制,分为直动式、分布直动式和先导式,从实用性、经济性、可靠性等因素考虑,我们选择直动式电磁阀熔断器在电路中主要起短路保护作用,过载或短路时熔体发热而熔断,从而达到保护电路的目的。
它具有体积小,便于维护,价格低廉,分断能力强,限流能力好等优点,有NT、RT、RL、FA4等系列,我们选择额定分断能力100KA、最大额定电流400A的有填封闭管式熔断器RT15型作为电路熔断器。
在本设计中,我们要实现大、小球的分拣传送,实现其上下、左右移动,就要用到能实现正反转的交流异步电动机。
异步电动机主要用于拖动各种生产机械,结构简单,使用方便,运行可靠,成本低廉,效率较高。
第3章 软件设计3.1系统流程图根据设计要求,对大、小球要分类传送的控制要求,画出系统流程图。
系统流程图如图3-1所示。
开始初始状态到上限?时间到?大小球选择启动开关?在原点?右移上升延时1秒抓球下降到小球限?到大球限?到下限?下降结束抓球右移上升延时1秒到上限?时间到?延时1秒放球时间到?上升到上限?到左限?左移大球小球YYYY YYY YYYY图3-1 大、小球分类选择传送PLC 控制的系统流程3.2顺序功能图顺序功能图如图3-2所示。
图3-2大、小球分类选择传送PLC控制的顺序功能图3.3梯形图和指令表图3-3 大、小球分类选择传送PLC 控制的梯形图根据梯形图写出系统的指令表0 LD M80021 SET S02 STL S03 LD X14 AND X35 SET S206 STL S207 OUT Y08 LD X09 SET S2110 STL S2111 OUT Y112 LD X213 AND X614 SET S2215 LDI X216 AND X617 SET S2518 STL S2219 SET Y520 OUT T021 K1022 LD T023 SET S23 24 STL S2325 OUT Y226 LD X327 SET S2428 STL S2429 OUT Y330 LD X431 SET S2832 STL S2533 SET Y534 OUT T035 K1036 LD T037 SET S2638 STL S2639 OUT Y240 LD X341 SET S2742 STL S2743 OUT Y344 LD X545 SET S2846 STL S2847 OUT Y148 LD X249 SET S2950 STL S2951 RST Y552 OUT T153 K1054 LD T155 SET S3056 STL S3057 OUT Y258 LD X359 SET S3160 STL S3161 OUT Y462 LD X163 ANI X1464 SET S2065 RET66 END3.4程序分析电路接通后,M8002产生触发脉冲同时按下左限开关X1、上限开关X3对系统置位,显示原点Y0灯亮。
接着按下启动开关X0,系统启动,开始下行,Y1显示,到达下限X2时,进入选择顺序的两个分支电路。
如果此时吸盘吸起的是大球,则下限位开关X2的常开触点闭合,电磁阀Y5通电吸球,延时1秒后开始上升,Y2显示,到达上限X3后即右行;若是小球,则下限位开关X2常闭触点闭合吸球,其余过程同大球。
吸住小球向右运行,Y3显示,到达小球右限X4后开始下行(大球是在到达大球右限开关X5后开始下行),Y1显示。
到达下限X2之后电磁阀线圈Y5断电放球,然后延时1秒,机械臂开始上行,Y2显示,到达上限X3之后,开始向左移动,Y4显示,回到原点后,原点Y0显示。
第4章软硬件调试4.1系统调试打开三菱FX2N系列仿真软件,将梯形图程序输入到计算机,并连接好外部接线图,然后对程序进行调试。
首先,系统通电运行后,同时按下X1、X3,观察原点显示Y0,看机械臂是否在机械原点,并有显示。
然后,按下启动按钮X0,观察机械臂是否按照本设计设定的工作方式运行。
无误后,按下停止按钮,观察系统是否在完成本周期的工作后返回原点,并停留在初始步。
若运行过程中出错,则要认真查找出错原因,哪个环节出错,然后作出修改,并重新运行,直至运行结果完全正确。
4.2 使用说明X0 启动按钮,X1左限位开关,X2下限位开关,X3上限位开关,X4小球右限位开关,X5大球右限位开关,X6接近开关,X14停止开关。
结论此次设计中用到了PLC流程图、梯形图、指令表三种机械手控制方式。
按照这种步骤编写程序条理清晰,连贯性强,但若要增加其它机械手控制方式或进行扩展,程序会变得相当复杂而且容易出错,出错后调试修改也很困难。
通过整个设计过程,使我对机电传动有了很大的收获。
充分认识到自己的不足,通过理论分析和实践的反复和论证,许多问题有了较好的解决。
通过这次设计,使我了解了PLC机械手在大小球分拣中的工作原理,学习到机械手的原理及使用。
发现自己还有很多不足,对PLC的了解还不够,但自己在设计中培养了我综合运用理论知识与应用相结合的能力,真正做到了学有所用。
其次,了解了PLC机械手在大小球分选系统的工作原理,首次学习了一些机械手的工作原理及使用方法。
其中电路及软件实现是此次设计的主要部分。