linux uboot的启动过程
Linuxreboot全过程

Linuxreboot全过程⼀、版本说明嵌⼊式Linux 下⾯的reboot命令看似简单,但出问题时定位起来发现别有洞天。
下⾯就按在shell下执⾏reboot命令之后程序的执⾏过程进⾏解析。
Busybox:1.23.2 ——制作跟⽂件系统,/sbin/reboot程序的由来Libc:2.6.1 ——标准C库Linux kernel:2.6.35 ——内核版本⼆、流程简介如图所⽰是reboot的简要流程图。
普通的reboot是通过busybox为⼊⼝,进⼊halt_main函数,然后给init进程发送SIGTERM信号,init进程接收到信号后给其他进程发送终⽌信号,最后调⽤C库函数reboot,reboot通过系统调⽤sys_reboot进⼊内核,内核将整个系统重启。
其中在shell中执⾏reboot –f则通过halt_main直接调⽤C函数reboot,不经过init进程。
三、代码详解1.reboot命令端执⾏reboot命令,busybox检查当前命令为reboot,进⼊函数halt_main,reboot,halt和poweroff都会进⼊这个函数,不同的命令发送的信号和执⾏的操作不同。
现只分析reboot的情况。
代码如下1.int halt_main(int argc, char **argv) MAIN_EXTERNALLY_VISIBLE;2.int halt_main(int argc UNUSED_PARAM, char **argv)3.{4.static const int magic[] = {RB_HALT_SYSTEM,6.RB_POWER_OFF,7.RB_AUTOBOOT8.};9.static const smallint signals[] = { SIGUSR1, SIGUSR2, SIGTERM };10.11.int delay = 0;12.int which, flags, rc;13.14./* Figure out which applet we're running */15.for (which = 0; "hpr"[which] != applet_name[0]; which++)16.continue;17.18./* Parse and handle arguments */19.opt_complementary = "d+"; /* -d N */20./* We support -w even if !ENABLE_FEATURE_WTMP,21.* in order to not break scripts.22.* -i (shut down network interfaces) is ignored.23.*/24.flags = getopt32(argv, "d:nfwi", &delay);25.26.sleep(delay);27.28.write_wtmp();29.30.if (flags & 8) /* -w */31.return EXIT_SUCCESS;32.33.if (!(flags & 2)) /* no -n */34.sync();35.36./* Perform action. */37.rc = 1;38.if (!(flags & 4)) { /* no -f *///TODO: I tend to think that signalling linuxrc is wrong 40.// pity original author didn't comment on it...41.if (ENABLE_FEATURE_INITRD) {42./* talk to linuxrc */43./* bbox init/linuxrc assumed */44.pid_t *pidlist = find_pid_by_name("linuxrc");45.if (pidlist[0] > 0)46.rc = kill(pidlist[0], signals[which]);47.if (ENABLE_FEATURE_CLEAN_UP)48.free(pidlist);49.}50.if (rc) {51./* talk to init */52.if (!ENABLE_FEATURE_CALL_TELINIT) {53./* bbox init assumed */54.rc = kill(1, signals[which]);55.} else {56./* SysV style init assumed */57./* runlevels:58.* 0 == shutdown59.* 6 == reboot */60.execlp(CONFIG_TELINIT_PATH,61.CONFIG_TELINIT_PATH,62.which == 2 ? "6" : "0",63.(char *)NULL64.);65.bb_perror_msg_and_die("can't execute '%s'",66.CONFIG_TELINIT_PATH);67.}68.}69.} else {70.rc = reboot(magic[which]);71.}72.if (rc)74.bb_perror_nomsg_and_die();75.return rc;76.}该函数判断reboot是否带了 -f 参数,如果带了,直接调⽤reboot调⽤C函数库如果没带,则通过kill(1, signals[which]);给init进程发送SIGTERM信号。
S32G RDB2 Linux板级开发包 Uboot 定制说明书

CAS training Rev.4, 9/2021 S32G RDB2 Linux板级开发包Uboot 定制by John Li (nxa08200)本文说明S32G RDB2板Linux板级开发包BSP30 的Uboot细节,以帮助客户了解S32G 的Uboot是如何运行的,以及如何修改到客户的新板上。
阅读本文之前请先阅读文档Automotive SW – S32G2 reference Software\Linux\《S32G_LinuxBSP30.0.0_User_Manual.pdf》,预先熟悉一下S32G的编译环境,本文部分内容与之重复。
《S32G_LinuxBSP30.0.0_Release_Notes.pdf》,为release notes。
本文推荐必读有第1,2章,第三章的第3.6节,为平台相关必须了解的信息。
第三章其余部分为Linux背景知识介绍,可以选择阅读。
注意本文是使用默认的no-security uboot 直接启动的方式为说明的,security ATF boot 的方式另文说明,注意使用ATF后部分需要定制的部分在ATF中,uboot会简单很多。
请注意本文为培训和辅助文档,本文不是目录1S32G Linux文档说明 (2)2创建S32G RDB2 Linux板级开发包编译环境 (2)2.1创建yocto编译环境: (2)2.2独立编译 (8)3FSL Uboot 定制 (11)3.1FDT支持 (12)3.2DM(driver model)支持 (17)3.3Uboot目录结构 (29)3.4Uboot编译 (31)3.5Uboot初始化流程 (32)3.6Uboot 定制 (38)3.7Uboot debug信息 (84)S32G Uboot21S32G Linux 文档说明根据文档搭建Yocto 编译环境和standalone 编译环境。
参考Release Noes 的What’s New 一章了解最新的BSP 相对于前一版本的更新。
U-BOOT启动过程

U-Boot启动过程U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下:(1)第一阶段的功能Ø硬件设备初始化Ø加载U-Boot第二阶段代码到RAM空间Ø设臵好栈Ø跳转到第二阶段代码入口(2)第二阶段的功能Ø初始化本阶段使用的硬件设备Ø检测系统内存映射Ø将内核从Flash读取到RAM中Ø为内核设臵启动参数Ø调用内核1.1.1U-Boot启动第一阶段代码分析第一阶段对应的文件是cpu/arm920t/start.S和board/samsung/mini2440/lowlevel_init.S。
U-Boot启动第一阶段流程如下:图 2.1 U-Boot启动第一阶段流程根据cpu/arm920t/u-boot.lds中指定的连接方式:ENTRY(_start)SECTIONS{. = 0x00000000;. = ALIGN(4);.text :{cpu/arm920t/start.o (.text)board/samsung/mini2440/lowlevel_init.o (.text)board/samsung/mini2440/nand_read.o (.text)*(.text)}……}第一个链接的是cpu/arm920t/start.o,因此u-boot.bin的入口代码在cpu/arm920t/start.o中,其源代码在cpu/arm920t/start.S中。
下面我们来分析cpu/arm920t/start.S的执行。
1.硬件设备初始化(1)设臵异常向量cpu/arm920t/start.S开头有如下的代码:.globl _start_start: b start_code /* 复位*/ldr pc, _undefined_instruction /* 未定义指令向量 */ldr pc, _software_interrupt /* 软件中断向量*/ldr pc, _prefetch_abort /* 预取指令异常向量 */ldr pc, _data_abort /* 数据操作异常向量 */ldr pc, _not_used /* 未使用 */ldr pc, _irq /* irq中断向量 */ldr pc, _fiq /* fiq中断向量 *//* 中断向量表入口地址 */_undefined_instruction: .word undefined_instruction_software_interrupt: .word software_interrupt_prefetch_abort: .word prefetch_abort_data_abort: .word data_abort_not_used: .word not_used_irq: .word irq_fiq: .word fiq.balignl 16,0xdeadbeef以上代码设臵了ARM异常向量表,各个异常向量介绍如下:表 2.1 ARM异常向量表在cpu/arm920t/start.S中还有这些异常对应的异常处理程序。
烧写ARM开发板系统教程-----uboot、内核以及文件系统

烧写ARM开发板系统教程-----uboot、内核以及⽂件系统⼀、sd启动将u-boot镜像写⼊SD卡,将SD卡通过读卡器接上电脑(或直接插⼊笔记本卡槽),通过"cat /proc/partitions"找出SD卡对应的设备,我的设备节点是/dev/sdb.(内存卡的节点)。
当有多个交叉编译器是,不⽅便设置环境变量时,可以在编译命令中指定交叉编译器,具体如下:在源码中操作以下步骤:make distcleanmake ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.5.1/bin/arm-none-linux-gnueabi- mrpropermake ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.5.1/bin/arm-none-linux-gnueabi- tiny210_configmake ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.5.1/bin/arm-none-linux-gnueabi- all spl编译出tiny210-uboot.bin,注意交叉编译⼯具路径执⾏下⾯的命令$sudo dd iflag=dsync oflag=dsync if=tiny210-uboot.bin of=/dev/sdb seek=1把内存卡插⼊开发板,使⽤串⼝⼯具设置环境变量:setenv gatewayip 192.168.1.1(电脑⽹关)setenv ipaddr 192.168.1.102(开发板ip,不要与虚拟机和电脑ip冲突)setenv netmask 255.255.255.0setenv serverip 192.168.1.10(虚拟机ip)saveenv⼆、nand启动烧写Uboot:通过SD卡启动的u-boot for tiny210 将u-boot镜像写⼊nandflash在虚拟机下重启tftp sudo service tftpd-hpa restart开发板终端下执⾏下⾯的命令:[FriendlyLEG-TINY210]# tftp 21000000 tiny210-uboot.bin[FriendlyLEG-TINY210]# nand erase.chip[FriendlyLEG-TINY210]# nand write 21000000 0 3c1f4 (写⼊长度)内核的烧写位置是0x600000开始的区域,⽂件系统烧写位置为0xe00000开始的区域。
UBoot操作和常用命令

UBoot常用命令
• usb start: 起动usb 功能 • usb info: 列出设备 • usb scan: 扫描usb storage(u 盘)设备 • f的at文ls:件列出DOS FAT文件系统, 如:fatls usb 0列出第一块U盘中 • fatload: 读入FAT中的一个文件,如:fatload usb 0 0x30000000
• 通常,Boot Loader 是严重地依赖于硬件而实现的, 特别是在嵌入式世界。因此,在嵌入式世界里建 立一个通用的Boot Loader 几乎是不可能的。尽管 如此,我们仍然可以对Boot Loader 归纳出一些通 用的概念来,以指导用户特定的Boot Loader 设计 与实现。
UBoot来源
• nand write [内存地址] [NAND地址] [大小]
– 将SDRAM中地址0x31000000中大小为0x00200000的内容写入NAND Flash的0x100000地址。
– nand write 0x31000000 0x00100000 0x00200000 – NAND write: device 0 offset 1048576, size 2097152 ... 2097152 bytes
Creating 5 MTD partitions on "NAND 256MiB 3,3V 8-bit": 0x000000000000-0x000000040000 : "supervivi" ftl_cs: FTL header not found. 0x000000040000-0x000000060000 : "param" uncorrectable error : 0x000000060000-0x000000560000 : "Kernel" ftl_cs: FTL header not found. 0x000000560000-0x000040560000 : "root" mtd: partition "root" extends beyond the end of device "NAND 256MiB 3,3V 8-bit" -- size truncated to 0xfaa0000 ftl_cs: FTL header not found. 0x000000000000-0x000040000000 : "nand" mtd: partition "nand" extends beyond the end of device "NAND 256MiB 3,3V 8-bit" -- size truncated to 0x10000000
Uboot启动流程
U-Boot启动过程问题:u-boot入口点?C语言是main. U-boot是lds链接器脚本开发板上电后,执行U-Boot的第一条指令,然后顺序执行U-Boot 启动函数。
看一下board/smdk2410/u-boot.lds这个链接脚本,可以知道目标程序的各部分链接顺序。
第一个要链接的是cpu/arm920t/start.o,那么U-Boot的入口指令一定位于这个程序中。
下面分两阶段介绍启动流程:第一阶段1.cpu/arm920t/start.S这个汇编程序是U-Boot的入口程序,开头就是复位向量的代码。
_start: b reset //复位向量ldr pc, _undefined_instructionldr pc, _software_interruptldr pc, _prefetch_abortldr pc, _data_abortldr pc, _not_usedldr pc, _irq //中断向量,在程序执行中发生中断了,CPU会跳转到这里来ldr pc, _fiq //中断向量…/* the actual reset code */reset: //复位启动子程序/* 设置CPU为SVC32模式 */mrs r0,cpsrbic r0,r0,#0x1forr r0,r0,#0xd3msr cpsr,r0/* 关闭看门狗 */…………relocate: /* 把U-Boot重新定位到RAM */ adr r0, _start /* r0是代码的当前位置 */ldr r1, _TEXT_BASE /*_TEXT_BASE是RAM中的地址 */ cmp r0, r1 /* 比较r0和r1,判断当前是从Flash启动,还是RAM */beq stack_setup /* 如果r0等于r1,跳过重定位代码 *//* 准备重新定位代码 */ldr r2, _armboot_startldr r3, _bss_startsub r2, r3, r2 /* r2 得到armboot的大小 */ add r2, r0, r2 /* r2 得到要复制代码的末尾地址 */ copy_loop: /* 重新定位代码 */ldmia r0!, {r3-r10} /*从源地址[r0]复制 */stmia r1!, {r3-r10} /* 复制到目的地址[r1] */cmp r0, r2 /* 复制数据块直到源数据末尾地址[r2] */ ble copy_loop/* 初始化堆栈等 */stack_setup:ldr r0, _TEXT_BASE /* 上面是128 KiB重定位的u-boot */ sub r0, r0, #CFG_MALLOC_LEN /* 向下是内存分配空间 */ sub r0, r0, #CFG_GBL_DATA_SIZE /* 然后是bdinfo结构体地址空间 */#ifdef CONFIG_USE_IRQsub r0, r0, #(CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ) #endifsub sp, r0, #12 /* 为abort-stack预留3个字 */ clear_bss:ldr r0, _bss_start /* 找到bss段起始地址 */ldr r1, _bss_end /* bss段末尾地址 */mov r2, #0x00000000 /* 清零 */clbss_l:str r2, [r0]/* bss段地址空间清零循环... */add r0, r0, #4cmp r0, r1bne clbss_l/* 跳转到start_armboot函数入口,_start_armboot字保存函数入口指针 */ldr pc, _start_armboot_start_armboot: .word start_armboot //start_armboot 函数在lib_arm/board.c中实现//不要求背住,只要求了解第二阶段2.lib_arm/board.cstart_armboot是U-Boot执行的第一个C语言函数,完成系统初始化工作,进入主循环,处理用户输入的命令。
2440超详细U-BOOT(UBoot介绍+H-jtag使用+Uboot使用)

凌FL2440超详细U-BOOT作业(UBoot介绍+H-jtag使用+Uboot使用)Bootloader是高端嵌入式系统开发不可或缺的部分。
它是在操作系统内核启动之前运行的一段小程序。
通过这段小程序,我们可以初始化硬件设备、建立内存空间的映射图,从而将系统的软硬件环境带到一个合适的状态,以便为最终调用操作系统内核准备好正确的环境。
现在主流的bootloader有U-BOOT、vivi、Eboot等。
本次作业先做Uboot的烧写吧。
希望通过这个帖子,能让更多的初学者朋友了解一些UBoot的知识,也希望高手朋友对我的不足予以斧正。
首先说一下什么是Uboot:U-Boot,全称Universal Boot Loader,是遵循GPL条款的开放源码项目。
从FAD SROM、8xxROM、PPCBOOT逐步发展演化而来。
其源码目录、编译形式与Linux内核很相似,事实上,不少U-Boot源码就是相应的Linux内核源程序的简化,尤其是一些设备的驱动程序,这从U-Boot源码的注释中能体现这一点。
但是U-Boot不仅仅支持嵌入式Linu x系统的引导,当前,它还支持NetBSD, VxWorks, QNX, RTEMS, ARTOS, LynxOS嵌入式操作系统。
其目前要支持的目标操作系统是OpenBSD, NetBSD, FreeBSD,4.4BSD, Linux, SVR4, Esix, Solaris, Irix, SCO, Dell, NCR, VxWorks, LynxOS, pSOS, QNX, RTEMS, ARTOS。
这是U-Boot中Universal的一层含义,另外一层含义则是U-Boot除了支持PowerPC系列的处理器外,还能支持MIPS、x86、ARM、NIOS、XScale等诸多常用系列的处理器。
这两个特点正是U-Boot项目的开发目标,即支持尽可能多的嵌入式处理器和嵌入式操作系统。
uboot启动流程
U-Boot工作过程U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下:(1)第一阶段的功能硬件设备初始化加载U-Boot第二阶段代码到RAM空间设置好栈跳转到第二阶段代码入口(2)第二阶段的功能初始化本阶段使用的硬件设备检测系统内存映射将内核从Flash读取到RAM中为内核设置启动参数调用内核1.1.1 U-Boot启动第一阶段代码分析第一阶段对应的文件是cpu/arm920t/和board/samsung/mini2440/。
U-Boot启动第一阶段流程如下:图 U-Boot启动第一阶段流程根据cpu/arm920t/中指定的连接方式:ENTRY(_start)SECTIONS{. = 0x00000000;. = ALIGN(4);.text :{cpu/arm920t/ (.text)board/samsung/mini2440/ (.text)board/samsung/mini2440/ (.text)*(.text)}… …}第一个链接的是cpu/arm920t/,因此的入口代码在cpu/arm920t/中,其源代码在cpu/arm920t/中。
下面我们来分析cpu/arm920t/的执行。
1. 硬件设备初始化(1)设置异常向量cpu/arm920t/开头有如下的代码:.globl _start_start: b start_code /* 复位*/ldr pc, _undefined_instruction /*未定义指令向量 */ldr pc, _software_interrupt /* 软件中断向量 */ldr pc, _prefetch_abort /* 预取指令异常向量 */ldr pc, _data_abort /* 数据操作异常向量 */ldr pc, _not_used /* 未使用 */ldr pc, _irq /* irq中断向量 */ldr pc, _fiq /* fiq中断向量 */ /* 中断向量表入口地址 */_undefined_instruction: .word undefined_instruction_software_interrupt: .word software_interrupt_prefetch_abort: .word prefetch_abort_data_abort: .word data_abort_not_used: .word not_used_irq: .word irq_fiq: .word fiq.balignl 16,0xdeadbeef以上代码设置了ARM异常向量表,各个异常向量介绍如下:表 ARM异常向量表在cpu/arm920t/中还有这些异常对应的异常处理程序。
uboot启动代码详细讲解

·1 引言在专用的嵌入式板子运行 GNU/Linux 系统已经变得越来越流行。
一个嵌入式 Linux 系统从软件的角度看通常可以分为四个层次:1. 引导加载程序。
固化在固件(firmware)中的 boot 代码,也就是 Boot Loader,它的启动通常分为两个阶段。
2. Linux 核。
特定于嵌入式板子的定制核以及核的启动参数。
3. 文件系统。
包括根文件系统和建立于 Flash 存设备之上文件系统,root fs。
4. 用户应用程序。
特定于用户的应用程序。
有时在用户应用程序和核层之间可能还会包括一个嵌入式图形用户界面。
常用的嵌入式 GUI 有:MicroWindows 和 MiniGUI 等。
引导加载程序是系统加电后运行的第一段软件代码。
回忆一下 PC 的体系结构我们可以知道,PC 机中的引导加载程序由 BIOS(其本质就是一段固件程序)和位于硬盘 MBR 中的 OS Boot Loader(比如,LILO 和 GRUB 等)一起组成。
BIOS 在完成硬件检测和资源分配后,将硬盘 MBR 中的 Boot Loader 读到系统的 RAM 中,然后将控制权交给 OS Boot Loader。
Boot Loader 的主要运行任务就是将核映象从硬盘上读到 RAM 中,然后跳转到核的入口点去运行,也即开始启动操作系统。
而在嵌入式系统中,通常并没有像 BIOS 那样的固件程序(注,有的嵌入式 CPU 也会嵌一段短小的启动程序),因此整个系统的加载启动任务就完全由 Boot Loader 来完成。
比如在一个基于 ARM7TDMI core 的嵌入式系统中,系统在上电或复位时通常都从地址0x00000000 处开始执行,而在这个地址处安排的通常就是系统的 Boot Loader 程序。
·2 bootloader简介简单地说,Boot Loader (引导加载程序)就是在操作系统核运行之前运行的一段小程序,它的作用就是加载操作系统,它是系统加电后运行的第一段软件代码。
linux启动顺序讲解

linux启动顺序讲解⼀、简单介绍RHEL开机时的先后顺序BIOS —> MBR —> Kernel —> init1、当电脑⼀打开电源时电脑就会进⼊BIOS(BIOS的⼯作主要是检测⼀些硬件设备);2、检测完后会进⼊MBR也就是boot loader(MBR位于硬盘的第⼀个扇区总共512bytes,其中前446bytes⾥⾯的编码是在选择引导分区也就是决定要由哪个分区来引导);3、载⼊系统的Kernel(核⼼),在Kernel⾥主要是载⼊电脑设备的驱动程序,以便可以控制电脑上的设备,并且以只读⽅式来挂载根⽬录,也就是⼀开始只能读取到根⽬录所对应的那个分区,所以/etc、/bin、/sbin、/dev、/lib这五个⽬录必须同根⽬录在⼀个分区中;4、最后启动init这个程序,所以init这个程序的进程编号为1,是Linux中第⼀个执⾏的程序;init这个程序会根据Run level来执⾏以下这些程序:·/etc/rc.d/rc.sysinit;·/etc/rc.d/rc 和etc/rc.d/rc?.d/·/etc/rc.d/rc.local·如果有适当的图形界⾯管理程序⼆、BIOS初始化时主要的三个任务BIOS(B asic I nput/O utput S ystem)1、电脑周边设备的检测,加电⾃检POST (Power on self test);2、BIOS会选择要由哪⼀个设备来开机,例如:软盘启动、光盘启动、⽹络启动、最常见的从硬盘启动;3、选择好由哪个设备开机后,就开始读取这个设备的MBR 引导扇区;三、介绍Boot Loader中的主要⼯作1、Boot Loader可以安装在两个地⽅:·安装在硬盘的MBR中;·当有时候MBR中被其他开机管理程序占⽤就可以将Boot Loader 安装在硬盘中的其中⼀个分区的引导扇区上,;2、Boot Loader的程序码分为两个阶段:(1)Boot Loader第⼀阶段的程序码⾮常⼩,只有446bytes,可以存⼊在MBR或是某⼀个分区的引导扇区⾥,(2)Boot Loader第⼀阶段的程序码是从boot 分区来载⼊的,就是说Boot Loader 第⼆阶段程序码存放在/boot 这个分区中;3、下⾯来看三个Boot Loader 的开机流程范例,如在⼀块硬盘中安装了两个系统分别为:windows 2003 和Red hat linux当电脑开机后,会先载⼊MBR通过第⼀阶段程序码来载⼊第⼆阶段程序码,进⼊GRUB开机菜单这⾥选择哪个系统就会载⼊相应的核⼼;四、介绍GRUB和grub.conf 这个配置⽂件的内容其实从MBR载⼊Boot Loader开始,载⼊Kernel,载⼊init这些程序之间都是由GRUB这个多重开机管理程序所负责的。
计算机及Linux操作系统开机启动过程详解

计算机及Linux操作系统开机启动过程详解从按下开机键开始的计算机启动过程:(主要包括从主板加载BIOS并执⾏、从磁盘加载启动区并执⾏、从磁盘加载操作系统并执⾏三步,是依次递进的,详情参阅)加载BIOS:按下开机键,主板ROM的BIOS被(被谁?)加载到到内存0xffff0处,CPU 将 PC 寄存器的值强制初始化为 0xffff0(⼀跳)。
执⾏BIOS代码:阶段1(0xffff0 处的内容):该⼊⼝地址处存的是⼀个跳转指令,跳转的⽬的地是内存0xfe05b位置,该位置存了BIOS的真正内容。
执⾏该跳转(⼆跳)。
阶段2(0xfe05b 处的内容):执⾏硬件检测、硬件初始化、建⽴中断向量表等⼯作后,找到磁盘上的启动区(或称引导区)加载到内存0x7c00位置,并跳转到该位置(三跳)。
执⾏启动区代码(0x7c00 处的内容):从磁盘加载OS内核到内存,与上⾯不同这⾥内存位置不是固定的了,并跳转到OS内核代码处(四跳)。
执⾏OS内核代码:包括开启分段机制、进⼊保护模式、开启中断机制等,执⾏完后系统由OS接⼿管理。
具体过程见下⽂“操作系统启动过程”部分。
整体过程概要:补充:BIOS位于主板ROM,启动时被加载到内存;启动区、OS位于磁盘,被先后加载到内存。
BIOS、启动区在内存的位置是固定的(为啥是这三个值?早期定死的);⽽OS在内存位置不是固定的。
启动区:若⼀个磁盘上0盘0道1扇区的内容(512B)的末两个字节为0x55、0xaa,则这该扇区会被BIOS识别为启动区,该磁盘会被当做可启动盘。
往⼀个磁盘烧录OS后之所以可以当做启动盘就是因为往该位置写⼊了这些特殊数据。
若装了多系统,则启动时会列出并让⽤户选择要启动的系统,这些系统就是根据上述条件被识别得到。
可见,⼀个程序只要其虚拟内存以0x7c00作为段地址,且按上述条件烧录到磁盘,则就可以被BIOS识别为启动区加载到内存执⾏。
因此,如果该程序逻辑中不是去加载OS⽽是直接输出数据,则该程序⾃⾝就是⼀个简洁的"操作系统"。
简要分析linux系统的启动过程

简要分析linux系统的启动过程接触linux系统运维已经好⼏年了,常常被问到linux系统启动流程问题,刚好今天有空来梳理下这个过程:⼀般来说,所有的操作系统的启动流程基本就是:总的来说,linux系统启动流程可以简单总结为以下⼏步:1)开机BIOS⾃检,加载硬盘。
2)读取MBR,进⾏MBR引导。
3)grub引导菜单(Boot Loader)。
4)加载内核kernel。
5)启动init进程,依据inittab⽂件设定运⾏级别6)init进程,执⾏rc.sysinit⽂件。
7)启动内核模块,执⾏不同级别的脚本程序。
8)执⾏/etc/rc.d/rc.local9)启动mingetty,进⼊系统登陆界⾯。
linux系统安装时,如果要想设置开启启动项,可以:开机到BIOS提醒界⾯,按键F11(Dell服务器的做法)进⼊BIOS设置BOOT MENU,继⽽设置启动项:硬盘HD启动,光盘CD/DVD启动,还是U盘USB启动。
下⾯就linux操作系统的启动过程做⼀详细解析记录:加载内核操作系统接管硬件以后,⾸先读⼊ /boot ⽬录下的内核⽂件。
[root@bastion-IDC ~]# ll /boot/total 21668-rw-r--r--. 1 root root 105195 Nov 22 2013 config-2.6.32-431.el6.x86_64drwxr-xr-x. 3 root root 1024 Aug 22 16:31 efidrwxr-xr-x. 2 root root 1024 Aug 22 16:32 grub-rw-------. 1 root root 15217153 Aug 22 16:32 initramfs-2.6.32-431.el6.x86_64.imgdrwx------. 2 root root 12288 Aug 22 16:24 lost+found-rw-r--r--. 1 root root 193758 Nov 22 2013 symvers-2.6.32-431.el6.x86_64.gz-rw-r--r--. 1 root root 2518236 Nov 22 2013 System.map-2.6.32-431.el6.x86_64-rwxr-xr-x. 1 root root 4128368 Nov 22 2013 vmlinuz-2.6.32-431.el6.x86_64启动初始化进程内核⽂件加载以后,就开始运⾏第⼀个程序 /sbin/init,它的作⽤是初始化系统环境。
(整理)BeagleBone开发板研究心得.
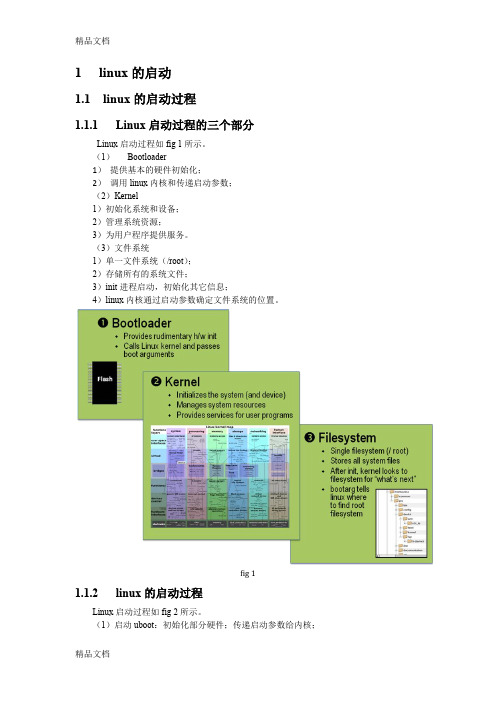
精品文档1 linux 的启动 1.1 linux 的启动过程1.1.1 Linux 启动过程的三个部分Linux 启动过程如 fig 1 所示。
(1) Bootloader 1) 提供基本的硬件初始化; 2) 调用 linux 内核和传递启动参数; (2)Kernel 1)初始化系统和设备; 2)管理系统资源; 3)为用户程序提供服务。
(3)文件系统 1)单一文件系统(/root); 2)存储所有的系统文件; 3)init 进程启动,初始化其它信息; 4)linux 内核通过启动参数确定文件系统的位置。
fig 11.1.2 linux 的启动过程Linux 启动过程如 fig 2 所示。
(1)启动 uboot:初始化部分硬件;传递启动参数给内核; 精品文档精品文档 (2)启动 linux 内核:初始化硬件; (3)启动文件系统:启动 init 进程和其它一些初始化、登录。
fig 21.2 beagleBone 开发板的启动过程beagleBone 开发板启动过程如 fig 3 所示。
(1)x-loader(MLO)是一级引导程序,系统上电后由 CPU 内部 firmware 自动拷贝到 内部 RAM 并执行。
主要作用为初始化 CPU,拷贝 u-boot 到内存中,然后把控制权交给 u-boot; (2)u-boot 是二级引导程序,主要用于和用户进行交互,提供映像更新、引导内核等 功能; (3)内核启动。
精品文档精品文档 fig 31.3 网络式保护 dtu 的启动过程(计划中)网络式保护 dtu 的启动过程如 fig 4 所示。
(1) 系统上电后,在内部 ram 中启动一级引导程序 x-loader; (2) 拷贝 uboot 到内存中,在内存中启动; (3) 拷贝内核到内存中,在内存中启动。
fig 4 Nand 布局如 fig5 所示。
fig 5 精品文档精品文档2 开发环境的搭建 2.1 windows 下开发板的使用和程序恢复过程2.1.1 windows 下开发板的使用方法(1)通过小 USB 接口连接比格尔开发板; (2)下载开发板驱动 BONE_DRV.exe,并安装; (3)通过串口工具,可以看到开发运行过程,如 fig 6 所示。
UBOOT引导Linux内核及向内核传递参数的方式

UBOOT引导Linux内核及向内核传递参数的⽅式 ⼀直以来没有想过有什么好的办法通过寄存器向内核传递参数,直到今天读UBOOT的实现⽅式。
在UBOOT中,引导内核最常⽤的⽅法是bootm命令,bootm命令可以引导“UBOOT格式”的内核。
先花点时间了解⼀下什么是“UBOOT格式”的内核吧:⽤UBOOT⾃带的mkimage命令⽣成的内核称为"UBOOT"格式的内核。
以下⾯这条命令为例: mkimage -n "Kernel 2.4.18" -A arm -O linux -T kernel -C none -a30007fc0 -e 30008000 -d 4020.bin vmlinux-2.4.18.img 其中与内核引导最密切的是-e 30008000,也就是内核的⼊⼝地址。
其它参数可以参考帮助信息。
其它UBOOT格式的内核与原来相⽐,只是进⾏(可选)了压缩,并在前⾯加了⼀个0x40⼤⼩的头。
这个头⾥放了内核的位置(0x30007fc0)和⼊⼝地址(0x30008000)和其它信息。
bootm命令执⾏时,先对头部信息等进⾏校验,然后把头信息放到⼀个结构⾥⾯。
最后根据内核类型调⽤相应的启动函数。
对于Linux⽽⾔就是do_bootm_linux,在启动函数⾥⾯,有这么⼀个操作:theKernel = (void (*)(int, int, uint))ntohl(hdr->ih_ep);,这是最关键的⼀个操作,将内核的⼊⼝地址0x30008000赋给了theKernel,在启动函数的最后,使⽤theKernel (0, bd->bi_arch_number, bd->bi_boot_params);启动内核。
根据传参规范,三个变量分别⽤r0,r1,r2传给内核,这样就巧妙地利⽤了函数指针进⾏了参数传递,实在是精妙!上⾯讲完了内核的引导及传参,需要引起注意的就是在使⽤mkimage命令⽣成内核时,-e后⾯的地址要⽐-a后⾯的地址偏移0x40,原因很简单,就不在细说了。
U-Boot启动过程--详细版的完全分析

(一)U-Boot启动过程--详细版的完全分析分类:U_boot知识和移植2011-10-29 09:42 664人阅读评论(0) 收藏举报-------------------------------------------------------------------------------------------------------------------------------------------我们知道,bootloader是系统上电后最初加载运行的代码。
它提供了处理器上电复位后最开始需要执行的初始化代码。
在PC机上引导程序一般由BIOS开始执行,然后读取硬盘中位于MBR(Main Boot Record,主引导记录)中的Bootloader(例如LILO或GRUB),并进一步引导操作系统的启动。
然而在嵌入式系统中通常没有像BIOS那样的固件程序,因此整个系统的加载启动就完全由bootloader来完成。
它主要的功能是加载与引导内核映像一个嵌入式的存储设备通过通常包括四个分区:第一分区:存放的当然是u-boot第二个分区:存放着u-boot要传给系统内核的参数第三个分区:是系统内核(kernel)第四个分区:则是根文件系统如下图所示:--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------u-boot是一种普遍用于嵌入式系统中的Bootloader。
u_boot 移植(一)之uboot配置编译
u_boot 移植(一)之uboot配置编译一 、开发环境PC OS : Ubuntu 14.04SOC : 基于ARM Cortex-a8 核的S5PC100开发板 : FSC100u_boot : u-boot-2010.03编译器 : arm-cortex_a8-linux-gnueabi-gcc version 4.4.6二、目标1.Uboot 能从FSC100的 Nand Flash 正常启动2.Uboot 支持DM9000 网卡3.Uboot 支持Nand Flash 读、写、擦除4.Uboot 支持Linux 内核引动好了,接下来就进行移植uboot到FSC100开发板吧 。
三、建立自己的平台1、 下载源码我们可以在下面这个网站上下载最新的和以前任一版本的 ubootftp://ftp.denx.de/pub/u-boot/2、 解压 uboot 源码并进入目录tar zxvf u-boot-2010.03.tar.gzcd u-boot-2010.03u-boot-2010.3 源码中已经支持了SMDKC100了(SMDKC100是三星公司基于SOC : S5PC100设计的一块开发板)。
我们的FSC100使用的SOC也是S5PC100,所以我们只需要稍加修改Uboot支持的SMDC100代码,就可以编译出支持我们的FSC100开发板的uboot了。
1.修改 u-boot 顶层目录下的 Makefile,指定交叉工具链在ifeq ($(HOSTARCH, $(ARCH))CROSS_COMPILE ?=endif下添加:ifeq (arm, $(ARCH))CROSS_COMPILE ?= arm-cortex_a8-linux-gnueabiendif2.在 u-boot 顶层目录下的 Makefile 中添加 fsc100 配置信息在smdkc100_config: unconfig@$(MKCONFIG) $(@:_config=) arm arm_cortexa8 smdkc100 samsung s5pc1xx下添加:fsc100_config: unconfig@$(MKCONFIG) $(@:_config=) arm arm_cortexa8 fsc100 samsung s5pc1xx3. 添加 fsc100 平台信息(1)进入board/samsung目录(2)拷贝smdkc100 为 fsc100(3)进入fsc100目录下修改smdkc100.c 为fsc100.c修改Makefile中的smkc100.o 为fsc100.o(4)进入include/configs目录,拷贝smdkc100.h为fsc100.hinclude/configs目录下的.h文件为对应开发板的配置文件。
linux启动流程

centos6启动流程•硬件启动阶段o Power on打开电源o BIOS▪POST: power on self test开机自检•初始化硬件设备,检测系统外围主要设备:cpu,memory,硬盘、显卡等▪确定启动设备•启动设备:硬盘、网络、U盘、光盘•如果启动设备是硬盘,则读取硬盘第一个扇区MBR,512字节•控制权交给bootloadero MBR▪MBR512字节• 1.446字节bootloadero启动加载器bootloader▪windows: ntloader仅仅启动os▪GRUB: GRand Unified Bootloader,CentOS 6 GRUB 0.97: GRUBLegacy, CentOS 7 以后使用GRUB 2.02• 2.64字节分区信息o16字节x4 partitions• 3.55aa标志位表示分区是否有效•grub启动阶段o stage1▪ 1.446字节bootloader•这是二进制的0101,写在MBR扇区的前446字节。
o单纯为了找到1.5阶段生成的bootloader上o stage1.5▪第一阶段446字节的bootloader无法存放内核位置,/boot/grub/grub.config里面有内核位置,但是/boot的文件系统需要加载,即想办法识别/boot的文件系统来读取config文件加载内核。
MBRbootloader太小无法容下文件系统的驱动代码,而且文件系统的类型有很多种,比如ext2 xfsext4 fat32等,MBRbootloader无法容下这么多种文件系统的驱动,所以,只能提供一个中间的过度bootloader即stage1_5 bootloader▪ 1.5阶段是MBR后面的分区,grub-install 时候,会将/boot/grub所在文件系统类型对应的stage1_5硬编码到MBR扇区后第一个分区前15个扇区中,因此这段空间位于MBR分区后,第一个分区之前。