计控实验四-最少拍控制算法研究
计算机控制实验指导书
目录一.计算机控制实验指导1.概述 (1)2.实验一A/D与D/A 转换 (3)3.实验二数字滤波 (7)4.实验三 D(s)离散化方法的研究 (9)5.实验四数字PID控制算法的研究 (13)6.实验五串级控制算法的研究 (16)7.实验六解耦控制算法的研究 (19)8.实验七最少拍控制算法的研究 (23)9.实验八具有纯滞后系统的大林控制 (28)10.实验九线性离散系统的全状态反馈控制 (30)11.实验十二维模糊控制器 (33)12.实验十一单神经元控制器 (36)二.计算机控制对象实验指导1.实验一直流电机转速计算机控制实验 (39)2.实验二水箱液位计算机控制实验 (41)三.计算机控制软件说明1.概述 (43)2.安装指南及系统要求 (48)3.LabVIEW编程及功能介绍 (49)5.附录 (78)概述一.系统功能特点1.以PC微机为操作台,高效率支持“计算机控制”的教学实验。
2.系统含有高阶电模拟单元,可根据教学实验需要进行灵活组合,构成各种典型环节与系统。
3.系统含有界面友好、功能丰富的软件。
PC微机在实验中,除了用作实验测试所需的虚拟仪器外,还可用作测试信号发生器以及具有很强柔性的数字控制器。
4.系统的硬件、软件设计,充分考虑了开放型、研究型实验的需要。
可自己设计实验内容,构建系统对象,编写控制算法,进行计算机控制技术的研究。
二.系统构成实验系统由上位PC微机(含实验系统上位机软件)、ACCT-I实验箱、USB2.0通讯线等组成。
ACCT-I实验箱内装有以C8051F060芯片(含数据处理系统软件)为核心构成的数据处理卡,通过USB口与PC微机连接。
1.ACCT-I实验箱简介ACCT-I实验箱是一个通用的实验箱。
它主要由电源部分U1单元,信号源部分U2单元,与PC机进行通讯的数据处理单元U3,元器件单元U4,非线性单元U5,U6,U7,模拟电路单元U8~U16组成,详见附图。
计算机控制系统 第四章 最小拍控制与纯滞后补偿

Z
根据题意,输入信号为单位速度输入,即r (t ) = t ,则有:
Φ e ( z ) = (1 − z −1 ) 2
代入式(4-12)求出最小拍控制器为
5.435(1 − 0.5 z −1 )(1 − 0.368z −1 ) D( z ) = (1 − z −1 )(1 + 0.718z −1 )
s ( 0 .5 s + 1)
位速度输入时的最小拍控制器。 解:根据图4-1可求出系统广义被控对象脉冲传递函数
1 − e −Ts 2 ] G( z) = Z[ ⋅ s s (0.5s + 1) 4 = Z [(1 − e −Ts ) 2 ] s ( s + 2) 4 4e −Ts = Z[ 2 ] − Z[ 2 ] s ( s + 2) s ( s + 2) 2 1 1 2 1 1 = Z[ 2 − + ] − Z [e −Ts ( 2 − + )] s s s+2 s s s+2 e − 2T z −1 (1 − z −1 + e 2T z −1 ) = (1 − z −1 )(1 − e − 2T z −1 )
对最小拍控制系统设计的要求是: (1)调节时间最短,即系统跟踪输入信号所需的采样周期数 最少; (2)在采样点处无静差,即对特定的参考输入信号,在达到 稳态后,系统在采样点能精确实现对输入信号的跟踪; (3)设计出来的数字控制器必须是物理上可以实现的; (4)闭环系统必须是稳定的。
一、最小拍闭环脉冲传递函数的确定 首先根据对控制系统性能指标的要求和其他约束条件, Φ (z 构造系统的闭环脉冲传递函数 。) 最小拍控制系统的设计要求是对特定的参考输入信号, 在系统达到稳态后,系统在采样点处静差为零。根据此约束条 件可以构造出系统的误差脉冲传递函数 Φ e (z )。典型计算机控制 系统结构图如图4-1所示。
计算机控制系统课程设计--- 最少拍控制系统设计
能源与动力工程学院课程设计报告题目:最少拍控制系统设计课程:计算机控制技术课程设计专业:电气工程及其自动化班级:电气0902 姓名:孙威学号: 091302224第一部分任务书《计算机控制技术》课程设计任务书一、课题名称最少拍控制系统设计二、课程设计目的课程设计是课程教学中的一项重要内容,是达到教学目标的重要环节,是综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义。
《计算机控制技术》是一门理论性、实用性和实践性都很强的课程,课程设计环节应占有更加重要的地位。
计算机控制技术的课程设计是一个综合运用知识的过程,它需要控制理论、程序设计、硬件电路设计等方面的知识融合。
通过课程设计,加深对学生控制算法设计的认识,学会控制算法的实际应用,使学生从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试工作打下基础。
三、课程设计内容设计以89C51单片机和ADC 、DAC 等电路、由运放电路实现的被控对象构成的计算机单闭环反馈控制系统。
1. 硬件电路设计:89C51最小系统加上模入电路(用ADC0809等)和模出电路(用TLC7528和运放等);由运放实现的被控对象。
2. 控制算法:最少拍控制。
3. 软件设计:主程序、中断程序、A/D 转换程序、滤波程序、最少拍控制程序、D/A 输出程序等。
四、课程设计要求1. 模入电路能接受双极性电压输入(-5V~+5V ),模出电路能输出双极性电压(-5V~+5V )。
2. 模入电路用两个通道分别采集被控对象的输出和给定信号。
3. 每个同学选择不同的被控对象:510(),()(1)(0.81)(1)(0.41)G s G s s s s s ==++++ 45(),()(0.41)(0.81)G s G s s s s s ==++ 58(),()(1)(0.21)(0.81)(0.21)G s G s s s s s s s ==++++55(),()(0.81)(0.31)(0.81)(0.21)G s G s s s s s ==++++4. 设计无纹波最少拍控制器。
计控实验四--最小拍系统设计
计控实验四--最小拍系统设计实验报告||实验名称最小拍系统设计实验课程名称计算机控制技术与系统||实验四 最少拍系统设计实验1、实验目的掌握最少拍系统的设计方法。
2、实验原理框图)(z HG3、实验要求设被控对象为要求:(1)采样时间T=1s ,采用零阶保持器,使用Matlab 求取出广义对象的z 传递函数; (2)设计单位阶跃输入下的最少拍控制器D(z),给出设计过程; (3)控制系统仿真结果及分析(系统是否稳定?有无纹波?几步跟踪?); (4)仿真系统对输入信号(斜坡、单位加速度)的灵敏性,观察系统性能变化。
4、实验过程4.1使用Matlab 求取Z 传函利用matlab 语句求取广义对象的Z 传递函数并将其转换为零极点形式,用到的程序如下: T=1; z0=[]; p0=[0 0 -1.252]; k0=2.1;G0=zpk(z0,p0,k0); sysd=c2d(G0,T,'zoh')得到的广义对象的z 传递函数为20.26304(z 2.827)(z 0.19)(z 1)(z 0.2859)++--1,)252.1(1.2)(20=+=T s s s G4.2单位阶跃输入下,理想最小拍系统的设计与仿真典型的输入函数为11(z )(z),q 1,2,3(1z )qA R --==-设闭环脉冲传递函数为(z)Φ,误差表达式设为(z)e Φ,数字控制器为D(z)。
则依据理想最小拍系统的设计原则有11(z)D(z),(z)(1z )(z)(z)1(z)p e F G -Φ=Φ=--Φ,(z)1(z),p q e Φ=-Φ=其中p 表示系统稳定所需要的拍数。
若要使数字控制器形势最简单,阶次最低,取F(z)=1,则11(z)1(z)(1z ),(z)1(1z )p p e --Φ=-Φ=-Φ=--单位阶跃输入r(t)=1对应的z 传递函数为11(z)(1z )R -=-单位阶跃输入对应的q=1,则p=1。
最少拍数字控制器的设计
课 程 设 计 用 纸
快为 0,应使表达式中拍数 N 最小。所以当 p=0,即 F(z)=1 时,系统在采样 点的输出可在最少拍(Nmin=q 拍)内达到稳态,即为最少拍控制。 最少拍控制器设计时,闭环 Z 传递函数及误差传递函数为: Φ (z)= 1 (1 z 1 ) q φ e(z)= (1 z 1 ) q 最少派控制器: U ( z) 1 Φ ( z) 1 (1 z 1 ) q D(z)= = E ( z ) G ( z ) 1 φ ( z ) G( z )(1 z 1 ) q q=1、2、3,取决于输入信号的类型 2、最少拍控制器的可实现问题。 前面根据最小拍定义确定的闭环误差脉冲传递函数 e ( z) (1 z 1 )q ( z) 1 (1 z 1 )q 只适用于对象不含有纯滞后环节的系统。实际中,很多对象都含有纯滞后,为 了使设计的控制器在物理上可实现,需对设计加以限制。使闭环脉冲传递函数的 1 q 零点包含纯滞后环节 Φ (z)=zd 1 (1 z )
四、最少拍数字控制器设计的总结 五、参考文献
--
-3-
课 程 设 计 用 纸
教师批阅
一、设计的目的及意义
通过对最少拍数字控制器的设计与仿真,让自己对最少拍数字控制器有更好 的理解与认识,透切理解最少拍、最少拍有纹波数字控制器、最少拍无纹波数字 控制器的概念,分清最少拍有纹波与无纹波控制系统的优缺点,熟练掌握最少拍 数字控制器的设计方法、步骤,并能灵巧地应用 MATLAB 平台对最少派控制器 进行系统仿真。通过设计,加深对计算机控制技术的认识,进一步巩固《计算机 控制技术》这一门课程的基础理论知识,提高对计算机控制系统设计的能力
--
-2-
课 程 设 计 用 纸
实验四 最少拍控制算法研究(给学生)
实验四 最少拍控制算法研究一、实验目的1.学习并熟悉最少拍控制器的设计和算法; 2.研究最少拍控制系统输出采样点间纹波的形成; 3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
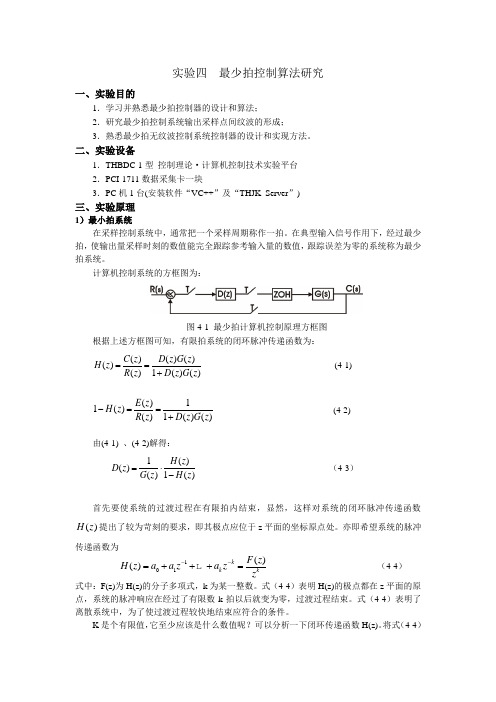
二、实验设备1.THBDC-1型 控制理论·计算机控制技术实验平台 2.PCI-1711数据采集卡一块3.PC 机1台(安装软件“VC++”及“THJK_Server ”)三、实验原理1)最小拍系统在采样控制系统中,通常把一个采样周期称作一拍。
在典型输入信号作用下,经过最少拍,使输出量采样时刻的数值能完全跟踪参考输入量的数值,跟踪误差为零的系统称为最少拍系统。
计算机控制系统的方框图为:图4-1 最少拍计算机控制原理方框图根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:)()(1)()()()()(z G z D z G z D z R z C z H +==(4-1) )()(11)()()(1z G z D z R z E z H +==- (4-2) 由(4-1) 、(4-2)解得: )(1)()(1)(z H z H z G z D -⋅= (4-3)首先要使系统的过渡过程在有限拍内结束,显然,这样对系统的闭环脉冲传递函数)(z H 提出了较为苛刻的要求,即其极点应位于z 平面的坐标原点处。
亦即希望系统的脉冲传递函数为101()()k k kF z H z a a z a z z --=+++=(4-4) 式中:F(z)为H(z)的分子多项式,k 为某一整数。
式(4-4)表明H(z)的极点都在z 平面的原点,系统的脉冲响应在经过了有限数k 拍以后就变为零,过渡过程结束。
式(4-4)表明了离散系统中,为了使过渡过程较快地结束应符合的条件。
K 是个有限值,它至少应该是什么数值呢?可以分析一下闭环传递函数H(z)。
将式(4-4)代入D(z)表示式,得)]([)()(1)(1)()(1)(z F z z F z G z H z H z G z D k-⋅=-⋅=(4-5) 如果m 和n 分别为对象和保持器的组合脉冲传递函数G(z)的分子和分母的阶次,l 为式(4-5)中F(z)的阶次,要使D(z)能实现,就应使分母的阶次大于分子的阶次k n m l ≥-+ (4-6)由式(4-6)可见,当0l =时,H(z)的分子0()F z F ==常数,暂态响应的持续节拍数最少。
计控实验四-最少拍控制算法研究报告
东南大学自动化学院实验报告课程名称:计算机控制技术第 4 次实验实验名称:实验四最少拍控制算法研究院(系):自动化学院专业:自动化姓名:学号:实验室:416 实验组别:同组人员:实验时间:2014年4月24日评定成绩:审阅教师:一、实验目的1.学习并熟悉最少拍控制器的设计和算法; 2.研究最少拍控制系统输出采样点间纹波的形成; 3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
二、实验设备1.THBDC-1型 控制理论·计算机控制技术实验平台 2.PCI-1711数据采集卡一块3.PC 机1台(安装软件“VC++”及“THJK_Server ”)三、实验原理1)最小拍系统在采样控制系统中,通常把一个采样周期称作一拍。
在典型输入信号作用下,经过最少拍,使输出量采样时刻的数值能完全跟踪参考输入量的数值,跟踪误差为零的系统称为最少拍系统。
计算机控制系统的方框图为:图4-1 最少拍计算机控制原理方框图根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:)()(1)()()()()(z G z D z G z D z R z C z H +==(4-1) )()(11)()()(1z G z D z R z E z H +==- (4-2) 由(4-1) 、(4-2)解得:)(1)()(1)(z H z H z G z D -⋅=(4-3)首先要使系统的过渡过程在有限拍结束,显然,这样对系统的闭环脉冲传递函数)(z H 提出了较为苛刻的要求,即其极点应位于z 平面的坐标原点处。
亦即希望系统的脉冲传递函数为101()()k k k F z H z a a z a z z--=+++=(4-4) 式中:F(z)为H(z)的分子多项式,k 为某一整数。
式(4-4)表明H(z)的极点都在z 平面的原点,系统的脉冲响应在经过了有限数k 拍以后就变为零,过渡过程结束。
式(4-4)表明了离散系统中,为了使过渡过程较快地结束应符合的条件。
最小拍控制详解
三拍。
Y( z) ? T 2 (0 ?z0 ? 0 ?z? 1 ? 3z? 2 ? 9z? 3 ? 16z? 4 ? ?
2
2020/1/31
10
2)G(z) 为不稳定对象且包含圆外零点
? ? (z)必须包含G(z)中全部圆外零点;
? ? e (z) 必须包含 G(z) 中全部圆外圆上极点;
? ? e (z) 至少应包含 q 个(1 ? z?1 )因子;
(1 ? z ?1 ) 因式的关于 z? 1 的多项式。
误差传递函数的结构为 ? e (z) ? (1 ? z?1 )M F (z)
2020/1/31
6
取 m(z ? 1)?
z? 1
e (z)R(z) ?
? lim?(1 ? z? 1 ?
z?1 )(1 ?
z?1 )M
2020/1/31
13
例1 被控对象的传递函数为
2.1 G0 (s) ? s2 ( s ? 1.252)
经采样(T=l)和零阶保持,试求其对于单位阶跃输入的最
少拍控制器。
解:(1)广义被控对象 G(z)
G(z) ?
Z
?1 ? ?
?
e s
?
Ts
2.1 ?
?s2
(s
?
1.252)
? ?
?
0.265z? 1(1 ? 2.78z?1 )(1 ? 0.2z? 1 ) (1 ? z? 1 )2 (1 ? 0.286z?1 )
广义被控对象零极点的分布:
圆外极点 无 ,
i? 0
圆外零点 p1 ? ? 2.78 , j ? 1
延时因子 z?1
r?1
2020输/1/3入1 函数的阶次
实验四-最少拍控制系统设计
实验四 最少拍控制系统设计姓名 学号 班级一、 实验目的1) 通过本实验,熟悉最少拍控制系统的设计方法。
2) 学习基于Matlab/Simulink 的最少拍控制系统的仿真研究方法。
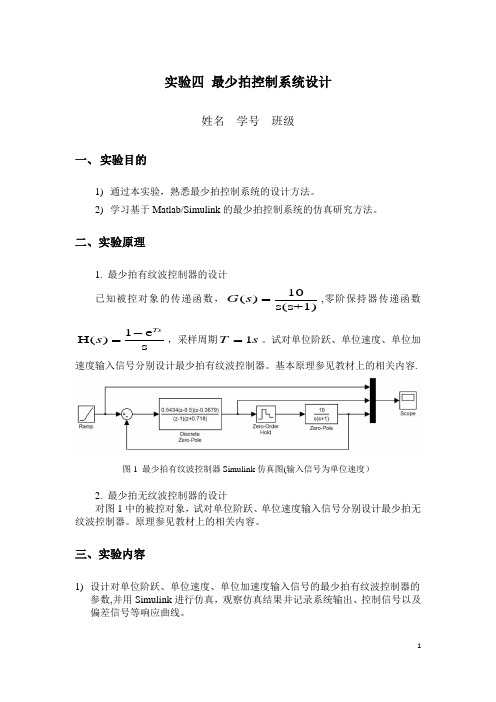
二、实验原理1. 最少拍有纹波控制器的设计 已知被控对象的传递函数,10()s(s+1)G s =,零阶保持器传递函数1e H()sTss -=,采样周期1T s =。
试对单位阶跃、单位速度、单位加速度输入信号分别设计最少拍有纹波控制器。
基本原理参见教材上的相关内容.图1 最少拍有纹波控制器Simulink 仿真图(输入信号为单位速度)2. 最少拍无纹波控制器的设计对图1中的被控对象,试对单位阶跃、单位速度输入信号分别设计最少拍无纹波控制器。
原理参见教材上的相关内容。
三、实验内容1) 设计对单位阶跃、单位速度、单位加速度输入信号的最少拍有纹波控制器的参数,并用Simulink 进行仿真,观察仿真结果并记录系统输出、控制信号以及偏差信号等响应曲线。
根据题意有:有纹波设计如下单位阶跃输入时:响应:单位速度输入时:响应:2)设计对单位阶跃、单位速度输入信号的最少拍无纹波控制器的参数,并用Simulink进行仿真,观察仿真结果并记录系统输出、控制信号以及偏差信号等仿真曲线。
根据题意有:单位阶跃输入时:响应:四、实验报告1)按照实验报告所要求的统一格式,填写实验报告;2)记录控制器参数设计过程、结果、Simulink仿真图和相关响应曲线。
3)根据实验过程和结果进行分析。
能否对单位加速度信号设计无纹波控制器?说明理由。
计算机控制08.最少拍控制算法
5.1 数字滤波与数据处理
5.2 数字控制器的设计方法
5.3 数字PID控制器的设计
5.4 最少拍控制算法
5.5 大林控制算法
5.6 模糊控制
自动化学院:李明
1
常用控制算法>>最少拍控制算法
最少拍控制的定义
R(z)
r(t)
T e(t)
E(z)
D(z)
T
(z) G(z)
U(z) T
对于加速度输入,输出永远都不会与输入曲线重合,也就是说按等 速输入设计的控制器用于加速度输入会产生误差。
自动化学院:李明
13
常用控制算法>>最少拍控制算法
最少拍系统的初步设计
最少拍控制器的局限性——对典型输入的适应性差
结论 一般来说,针对一种典型的输入函数R(z)设计,得到系统的闭环脉冲
传递函数φ(z) ,用于次数较低的输入函数R(z)时,系统将出现较大的超
R(z)
Tz 1 (1 z1)2
最少拍控制器设计时选择的闭环传递函数 (z) 1 (1 z1)2 2z1 z2
系统误差的脉冲传递函数
E(z)
R( z )e
(z)
R( z ) 1
(z)
Tz 1 (1 z1)2
(1
2z 1
z 2 )
Tz 1
系统输出 Y (z) R(z)(z) 2Tz2 3Tz3 4Tz4
E
(
z)
e
(
z
)
R(
z)
(1
z
1
)
(1
Tz 1 z1
)2
Tz1 1 z1
故稳态误差为
e()
最小拍控制算法研究实验报告
最小拍控制算法研究实验报告
实验报告:最小拍控制算法研究
一、实验目的:
本实验旨在研究最小拍控制算法的原理与实现方法,了解其在不同应用领域的优缺点,并通过实验验证其稳定性和可靠性。
二、实验原理:
最小拍控制算法是一种基于时间周期的控制算法,它通过对任务执行时间进行分析和预测,保证系统能够在规定的时间内完成任务。
该算法以最小的单位时间间隔(即拍)为基础,每个任务被分配到若干个拍中执行。
该算法通过调整拍的长度和数量来保证任务的平衡性和稳定性,从而达到最优控制效果。
三、实验步骤:
1. 设计测试系统并确定测试参数;
2. 编写最小拍控制算法代码,并将其嵌入到测试系统中;
3. 进行实验测试,并记录测试数据;
4. 对测试数据进行分析和处理,得出结论并撰写实验报告。
四、实验结果与讨论:
本实验使用最小拍控制算法对一个简单的测试系统进行了控制,得到了如下实验结果:
1. 最小拍控制算法可以有效地保证系统的稳定性和可靠性,能够在规定的时间内完成任务;
2. 在不同的应用领域中,最小拍控制算法的优缺点各有所表现,
需要结合实际情况进行选择和调整;
3. 最小拍控制算法的代码编写相对较为复杂,需要考虑多个参数和变量之间的关系。
五、实验结论:
本实验研究了最小拍控制算法的原理和应用,并通过实验验证了其稳定性和可靠性。
在不同的应用领域中,该算法具有各自的优缺点,需要结合具体情况进行选择和调整。
总体而言,最小拍控制算法是一种有效的控制算法,可以为各类系统提供稳定和可靠的控制效果。
计算机控制算法实验 最少拍控制
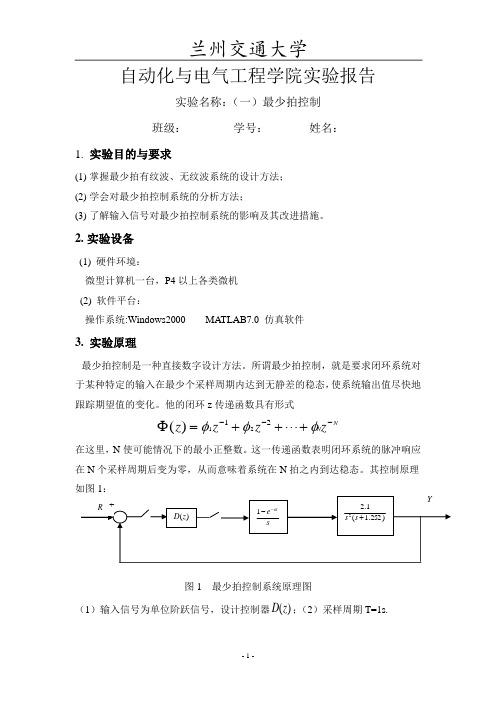
图1最少拍控制系统原理图
(1)输入信号为单位阶跃信号,设计控制器 ;(2)采样周期T=1s.
4.实验内容与步骤
(1)按系统要求计算 为有纹波控制器和无纹波控制器;
(2)按照系统原理图,在simulink下构造系统结构图模型;取输入信号为单位阶跃信号,设计控制器,观察输入输出波形,打印结果;
(3)观察系统输出波形在采样点以外的波形。
(4)比较有纹波与无纹波系统的区别,分析其原因。
5.实验设计:
(1)最少拍有纹波设计如下
图2有纹波控制设计
(2)最少拍无纹波设计如下:
(3)尝试用M文件实现dalin算法控制
5.实验设计:
6.实验结果:
图3纯滞后系统输出
图4纯滞后系统控制器输出
7.思考与分析:
(1)纯滞后控制系统对阶跃信号有无超调?为什么?
(2)纯滞后控制与PID控制有什么本质区别?消除振铃前后系统输出有什么不同?
(3)了解输入信号对最少拍控制系统的影响及其改进措施。
2.实验设备
(1)硬件环境:
微型计算机一台,P4以上各类微机
(2)软件平台:
操作系统:Windows2000 MATLAB7.0仿真软件
3.实验原理
最少拍控制是一种直接数字设计方法。所谓最少拍控制,就是要求闭环系统对于某种特定的输入在最少个采样周期内达到无静差的稳态,使系统输出值尽快地跟踪期望值的变化。他的闭环z传递函数具有形式
设被控对象为有纯滞后的一阶惯性环节或二阶惯性环节达林算法的设计目标是使整个闭环系统所期望的传递函数该算法控制将调整时间的要求放在次要而超调量小甚至没有放在首位
实验四最小拍控制器设计

实验报告课程名称 成 绩 实验项目 最小拍控制器投计 指导教师 学生姓名 学号 班级专业 实验地点 实验日期 年 月 日一、实验目的:1、了解和掌握有纹波和无纹波最小拍控制器的原理和设计方法。
2、利用Matlab 仿真,观察系统的输入输出曲线。
二、实验内容系统如图所示,一、当s T s s s G 1,)1(10)(=+=时 A 、阶跃输入信号作用下,有纹波最小拍控制器、无纹波最小拍控制器设计;最小拍有纹波控制器设计:11111211)()1(12211111111)2(11.01.0)](1)[()()()()()(;)(,;);1(;1)1()1)(1(][)()1)(1(])2(1[10]1)([)(G -------+-++-+-----------+-=Φ-Φ=ΦΦ==Φ==+⋅⋅⋅++⋅+⋅⋅⋅+++⋅⋅⋅++=Φ---+=-⋅=z e z e z z G z z z G z z D z z z m z z z z z f z f z f z f z f z z e z z e z e s e s G Z z e Lq p m p m m m m m sT 制器设计故相当于简单最小拍控无纯滞后环节除外无单位圆外的零极点阶跃输入βββ最小拍无纹波控制器设计: 11111111)2()1(1.01.0)](1)[()()()()()(;1])2(1[)(,11,1)1(];)2(1[)(,)(G )(-------+--=Φ-Φ=ΦΦ=--+=Φ-==Φ-+=ΦΦz e e z e z z G z z z G z z D e z e z z e f z e z f z z z e 则又则中的所有零点包含B 、使A 中采样点间增加4个点进行显示,观察有纹波、无纹波控制器的区别; 在采样点间增加4个点相当于T=0.2s;最小拍有纹波控制器设计:12.02.012.0111211)()1(1221112.0122.012.0)1210()810(1)](1)[()()()()()(;)(,;);1(;1)1()1)(1(][)()1)(1()1210()810(]1)([)(G ----------+-++-+------------+--=Φ-Φ=ΦΦ==Φ==+⋅⋅⋅++⋅+⋅⋅⋅+++⋅⋅⋅++=Φ---+-=-⋅=z e e z e z z G z z z G z z D z z z m z z z z z f z f z f z f z f z z e z z e z e s e s G Z z e Lq p m p m m m m m sT 制器设计故相当于简单最小拍控无纯滞后环节除外无单位圆外的零极点阶跃输入βββ最小拍无纹波控制器设计: 12.02.012.02.022.012.02.02.0112.02.011)1210(221)](1)[()()()()()(;1)65()45()(,145,1)1();45651()(,)(G )(-----------------+--=Φ-Φ=ΦΦ=--+-=Φ--==Φ--+=ΦΦz e e z e z z G z z z G z z D e z e z e z e e f z e e z f z z z e 则又则中的所有零点包含 二、当s T ss G 1,1)(==时 A 、阶跃输入信号作用下,无纹波最小拍控制器设计D 1(z);最小拍无纹波控制器设计:1)](1)[()()()()()(;)(,1,1)1(;)(,)(G )(;);1(;1)1()1)(1(][)(1]1)([)(G 1111111211)()1(1221111=Φ-Φ=ΦΦ==Φ==Φ=ΦΦ==+⋅⋅⋅++⋅+⋅⋅⋅+++⋅⋅⋅++=Φ-=-⋅=------+-++-+------z z G z z z G z z D z z f z f z z z z m z z z z z f z f z f z f z f z z z s e s G Z z e Lq p m p m m m m m sT 则又则中的所有零点包含无纯滞后环节除外无单位圆外的零极点阶跃输入βββ B 、斜坡输入信号作用下,无纹波最小拍控制器设计D 2(z);最小拍无纹波控制器设计:11221211221111211)()1(122111112)](1)[()()()()()(;2)(,1,20)(,1)1(;)(,)(G )(;);1(;2)1()1)(1(][)(1]1)([)(G ----=------+-++-+--------=Φ-Φ=ΦΦ=-=Φ-===Φ=Φ+=ΦΦ==+⋅⋅⋅++⋅+⋅⋅⋅+++⋅⋅⋅++=Φ-=-⋅=z z z z G z z z G z z D z z z f f dz z d z f z f z z z z m z z z z z f z f z f z f z f z z z s e s G Z z e z Lq p m p m m m m m sT 则又则中的所有零点包含无纯滞后环节除外无单位圆外的零极点斜坡输入βββ 三、实验步骤及结果一、Amatlab 代码:% 有纹波T=1;gz=c2d(tf(10,[1 1 0]),T)dz=tf([0.1*exp(1) -0.1],[1 exp(1)-2],T)sys=feedback(gz*dz,1)step(sys)% 无纹波T=1;gz=c2d(tf(10,[1 1 0]),T);dz=tf([0.1*exp(1) -0.1],[exp(1)-1 exp(1)-2],T)sys=feedback(gz*dz,1)step(sys)Bmatlab 代码:% 有纹波T=0.2;gz=c2d(tf(10,[1 1 0]),T)dz=tf([1 -exp(-0.2)],[10*exp(-0.2)-8 10-12*exp(-0.2)],T) sys=feedback(gz*dz,1)step(sys)% 无纹波T=0.2;gz=c2d(tf(10,[1 1 0]),T);dz=tf([1 -exp(-0.2)],[2-2*exp(-0.2) 10-12*exp(-0.2)],T) sys=feedback(gz*dz,1)step(sys)二、Amatlab代码:% 无纹波T=1;gz=c2d(tf(1,[1 0]),T)dz=tf(1,1,T)sys=feedback(gz*dz,1)step(sys)二、Bmatlab代码:% 无纹波T=1;gz=c2d(tf(1,[1 0]),T)dz=tf([2 -1],[1 -1],T)sys=feedback(gz*dz,1)step(sys)四、实验结果分析:五、实验心得与体会:。
第4章 控制算法(2)最少拍控制1

3
(2)闭环脉冲传递函数
闭环脉冲传递函数
D( z ) G ( Z ) Φ( z ) = 1 + D( z ) G ( Z )
这个闭环传函是根据性能指标要求构造出的(选择的), 这个闭环传函是根据性能指标要求构造出的(选择的),D(Z) ), 是要设计的控制器。 是要设计的控制器。 可以求出控制器为: 可以求出控制器为:
i =0 i =1
(4.50 )
数字控制器的直接涉及方法与步骤基本就是这样。 数字控制器的直接涉及方法与步骤基本就是这样。
6
(4)设计步骤归纳
给据性能指标要求和其它约束条件, ① 给据性能指标要求和其它约束条件,构造所要求的闭环脉冲 传函φ(Z) 传函 对被控对象传函G(S)带0阶保持器进行离散化 ② 对被控对象传函 带 阶保持器进行离散化 求出D(Z) ③ 求出 求出u(k) ④ 求出
这时, 这时,闭环脉冲传递函数
Φ(z) =1Φe (z) = 2z z
输出信号Y(z)为 为 输出信号
1
2
Tz1 Y(z) = R(z) Φ(z) = (2z1 z2 ) (1 z1)2 = 2Tz2 + 3Tz3 + 4Tz4 +...
有了E(z),Y(z),可以求出e(k),y(k),画出他的时域离散曲线如下 ,可以求出 有了 , 教材上91页图 页图4-27(b)) 图(教材上 页图 ( )
系统调节时间
输出Y(Z) 输出
ts=T
1 Y(z) = R(z) Φ(z) = z1 = z1 + z2 + z3 +... (1 z1)
最少拍控制算法的研究

计算机控制系统实验报告班级:测控09-X 学号: XX 姓名 XXX 成绩:实验七 最少拍控制算法的研究一、实验目的1.学习并掌握最少拍控制器的设计和实现方法,并研究最少拍控制系统对三种典型输入的适应性及输出采样点间的纹波。
2.学习并掌握最少拍无纹波控制器的设计和实现方法,并研究输出采样点间的纹波消除以及最少拍无纹波控制系统对三种典型输入的适应性。
二、实验内容1.设计并实现对象具有一个积分环节的二阶系统的最少拍控制,并通过混合仿真实验研究该闭环控制系统对三种典型输入的适应性以及输出采样点间的纹波。
2.设计并实现对象具有一个积分环节的二阶系统的最少拍无纹波控制,并通过混合仿真实验观察,该闭环控制系统输出采样点间纹波的消除,以及系统对三种典型输入的适应性。
三、实验步骤1.设计并连接模拟由一个积分环节和一个惯性环节组成的二阶被控对象的电路,并利用AD μC812构成的数据处理系统完成计算机控制系统的模拟量输入、输出通道的设计和连接。
2.利用上位机的虚拟仪器功能对此模拟二阶被控对象的电路进行测试,分别测取惯性环节的放大倍数、时间常数以及积分环节的积分时间常数。
在上位机完成阶跃输入下最少拍控制计算与实验结果显示、记录。
先完成阶跃输入下最少拍控制器的参数设计和调试,然后再用另外两种典型信号(等速与等加速)作为系统输入,观察系统输出并记录。
3.在上位机完成阶跃输入下最少拍无纹波控制器的计算与实验结果显示、记录。
先完成阶跃输入下最少拍无纹波控制器的参数设计和调试,然后再用另外两种典型信号(等速与等加速)作为系统输入,观察系统输出并记录。
4.对记录的实验结果进行分析,写出实验报告。
四、附录1.被控对象模拟与计算机闭环控制系统的构成 实验系统被控对象的传递函数为1()(1)KG s s T s =+(7-1)它可以用图7.1所示电路来模拟,计算机控制系统的方框图如图7.2所示:最少拍控制的效果对被控对象的参数变化非常敏感,实验中必须测取模拟对象的实际参数。
最少拍控制系统实验报告
计算机控制技术--基于Matlab的最少拍控制系统设计学院:计算机科学与技术班级:计科0902班学号:姓名:指导老师:日期: 2012年12月15日一、实验目的:1.学习使用Matlab 设计最少拍控系统的方法; 二、实验工具:X86系统兼容型计算机、MATLAB 软件。
三、实验内容: 1.实验原理最少拍设计,是指系统在典型输入信号(如阶跃信号、速度信号、加速度信号等)作用下,经过最少拍(有限拍)使系统输出的系统稳态误差为零。
因此,最少拍控制系统也称最少拍无差系统或最少拍随动系统,它实质上是时间最优控制系统,系统的性能指标就是系统调节时间最短或尽可能短,即对闭环Z 传递函数要求快速性和准确性。
下面以一个具体实例介绍最少拍系统的设计和仿真。
考虑图1所示的采样数字控制系统,被控对象的脉冲传递函数为210G ()(1)s s s =+图0 最少拍采样数字控制系统设采样周期T=1s ,首先求取广义被控对象的脉冲传递函数: 广义被控对象21112111111110()[](1)11(1)10[](1)110.36793.679(10.718)(1)(10.3679)Ts e G z Z s s s z z z z z z z z z -----------=+=-⨯-+---+=--我们知道,最少拍系统是按照指定的输入形式设计的,输入形式不同,数字控制器也不同。
因此,对三种不同的输入信号分别进行考虑: ① 单位阶跃信号:计算可得到最少拍数字控制器为1111()()1()0.2712(10.3679))()()(1())10.718e z z z z z z D z G z z z ----Φ=Φ=-Φ-==-Φ+检验误差序列:()(1())()1E z z R z =-Φ=由误差的变换函数得知,所设计的系统当k>1后,e (k )=0就是说,一拍以后,系统输出等于输入,设计正确。
② 单位速度信号:原理同上,我们可以得到:1111()0.5434(10.5)(10.3679)()()(1())(1)(10.718)z z z D z G z z z z ----Φ--==-Φ-+检验误差:1()(1())()E z z R z z -=-Φ=从E(z)看出,按单位速度输入设计的系统,当k 大于等于2之后,即二拍之后,误差e (k )=0,满足题目要求。
最少拍控制系统实验报告(精选)

最少拍控制系统实验报告(精选)
本次实验我们设计了一种最少拍控制系统,旨在实现一个简单而稳定的控制系统。
1. 系统结构
系统结构如下图所示:
该系统由一个开关控制器、一个数字控制器(DMC)、一个电机和一个传感器组成。
2. 开关控制器
我们使用一个开关控制器来实现系统的开关操作。
通过控制该开关控制器的开关状态,我们可以决定系统是处于开启状态还是关闭状态。
3. 数字控制器(DMC)
数字控制器(DMC)是实现最少拍控制的核心组件。
我们采用PID控制器来实现控制任务。
PID控制器由比例、积分和微分三个控制元素组成。
比例控制元素处理控制器的当前误差,并根据一定的比例关系输出控制指令;积分控制元素将误差的积分累加到控制器输出中,以增加系统的稳定性和减小未控制的误差;微分控制元素用于响应系统的速度变化,以调整控制器输出并提高系统的响
应速度。
4. 电机和传感器
电机和传感器是系统的执行部分。
电机负责执行控制指令,改变系统状态。
传感器用于监测系统状态,以便反馈给数字控制器。
5. 实验效果
通过实验,我们可以看到该控制系统具有较好的效果。
控制器能够输出稳定的控制指令,通过电机实现系统状态的改变。
传感器及时地反馈系统状态,以便数字控制器做出相应的控制调整。
该最少拍控制系统具有以下优点:
1)系统结构简单明了,易于理解和实现。
2)精度高,能够快速稳定地响应控制指令。
3)系统操作稳定,不易出现异常情况。
本次实验充分展示了我们设计的最少拍控制系统的良好效果,我们相信它能够在现代工业控制领域中得到广泛应用。
微机控制技术实验报告

《微机控制技术》课程设计报告课题:最少拍控制算法研究专业班级:自动化1401 姓名:学号:指导老师:***2017年5月21日目录1. 实验目的 (3)2. 控制任务及要求 (3)3. 控制算法理论分析 (3)4. 硬件设计 (5)5. 软件设计 (5)无纹波 (5)有纹波 (7)6. 结果分析 (9)7. 课程设计体会 (10)1.实验目的本次课程设计的目的是让同学们掌握微型计算机控制系统设计的一般步骤,掌握系统总体控制方案的设计方法、控制算法的设计、硬件设计的方法。
学习并熟悉最少拍控制器的设计和算法;研究最少拍控制系统输出采样点间纹波的形成;熟悉最少拍无纹波控制系统控制器的设计和实现方法。
复习单片机及其他控制器在实际生活中的应用,进一步加深对专业知识的认识和理解,使自己的设计水平、对所学知识的应用能力以及分析问题解决问题的能力得到全面提高。
2.控制任务及要求1.设计并实现具有一个积分环节的二阶系统的最少拍有纹波控制和无纹波控制。
对象特性G(s)=采用零阶保持器H0(s),采样周期T=0.1,试设计单位阶跃,单位速度输入时的有限拍调节器。
2.用Protel、Altium Designer等软件绘制原理图。
3.分别编写有纹波控制的算法程序和无纹波控制的算法程序。
4.绘制最少拍有纹波、无纹波控制时系统输出响应曲线,并分析。
3.控制算法理论分析在离散控制系统中,通常把一个采样周期称作一拍。
最少拍系统,也称为最小调整时间系统或最快响应系统。
它是指系统对应于典型的输入具有最快的响应速度,被控量能经过最少采样周期达到设定值,且稳态误差为定值。
显然,这样对系统的闭环脉冲传递函数)(zφ提出了较为苛刻的要求,即其极点应位于Z平面的坐标原点处。
1最少拍控制算法计算机控制系统的方框图为:图7-1 最少拍计算机控制原理方框图根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:)()(1)()()()()(zHGzDzHGzDzRzCz+==φ (1))(1)()(11)()()(1zzHGzDzRzEzeφφ-=+== (2))1(10+sss eTs )1(--由(1) 、(2)解得:)()()()(z HG z z z D e φφ= 随动系统的调节时间也就是系统误差)(1kt e 达到零或为一恒值所需的时间,由Z 变换定义可知: +++++==----∞=∑k k k z kT e z T e z T e e z KT e Z E )()2()()0()()12111101(1有限拍系统就是要求系统在典型的输入信号作用下,当N K ≥时,)(1kT e 恒为零或恒为一常量。
计控实验四-最少拍控制算法研究
东南大学自动化学院实验报告课程名称:计算机控制技术第 4 次实验实验名称:实验四最少拍控制算法研究院(系):自动化学院专业:自动化姓名:学号:实验室:416 实验组别:同组人员:实验时间:2014年4月24日评定成绩:审阅教师:一、实验目的1.学习并熟悉最少拍控制器的设计和算法; 2.研究最少拍控制系统输出采样点间纹波的形成; 3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
二、实验设备1.THBDC-1型 控制理论·计算机控制技术实验平台 2.PCI-1711数据采集卡一块3.PC 机1台(安装软件“VC++”及“THJK_Server ”)三、实验原理1)最小拍系统在采样控制系统中,通常把一个采样周期称作一拍。
在典型输入信号作用下,经过最少拍,使输出量采样时刻的数值能完全跟踪参考输入量的数值,跟踪误差为零的系统称为最少拍系统。
计算机控制系统的方框图为:图4-1 最少拍计算机控制原理方框图根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:)()(1)()()()()(z G z D z G z D z R z C z H +==(4-1) )()(11)()()(1z G z D z R z E z H +==- (4-2) 由(4-1) 、(4-2)解得: )(1)()(1)(z H z H z G z D -⋅= (4-3)首先要使系统的过渡过程在有限拍内结束,显然,这样对系统的闭环脉冲传递函数)(z H 提出了较为苛刻的要求,即其极点应位于z 平面的坐标原点处。
亦即希望系统的脉冲传递函数为101()()k k k F z H z a a z a z z--=+++=(4-4) 式中:F(z)为H(z)的分子多项式,k 为某一整数。
式(4-4)表明H(z)的极点都在z 平面的原点,系统的脉冲响应在经过了有限数k 拍以后就变为零,过渡过程结束。
式(4-4)表明了离散系统中,为了使过渡过程较快地结束应符合的条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
东南大学自动化学院实验报告课程名称:计算机控制技术第 4 次实验实验名称:实验四最少拍控制算法研究院(系):自动化学院专业:自动化姓名:学号:实验室:416 实验组别:同组人员:实验时间:2014年4月24日评定成绩:审阅教师:一、实验目的1.学习并熟悉最少拍控制器的设计和算法; 2.研究最少拍控制系统输出采样点间纹波的形成; 3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
二、实验设备1.THBDC-1型 控制理论·计算机控制技术实验平台 2.PCI-1711数据采集卡一块3.PC 机1台(安装软件“VC++”及“THJK_Server ”)三、实验原理1)最小拍系统在采样控制系统中,通常把一个采样周期称作一拍。
在典型输入信号作用下,经过最少拍,使输出量采样时刻的数值能完全跟踪参考输入量的数值,跟踪误差为零的系统称为最少拍系统。
计算机控制系统的方框图为:图4-1 最少拍计算机控制原理方框图根据上述方框图可知,有限拍系统的闭环脉冲传递函数为:)()(1)()()()()(z G z D z G z D z R z C z H +==(4-1) )()(11)()()(1z G z D z R z E z H +==- (4-2) 由(4-1) 、(4-2)解得: )(1)()(1)(z H z H z G z D -⋅= (4-3)首先要使系统的过渡过程在有限拍内结束,显然,这样对系统的闭环脉冲传递函数)(z H 提出了较为苛刻的要求,即其极点应位于z 平面的坐标原点处。
亦即希望系统的脉冲传递函数为101()()k k k F z H z a a z a z z--=+++=(4-4) 式中:F(z)为H(z)的分子多项式,k 为某一整数。
式(4-4)表明H(z)的极点都在z 平面的原点,系统的脉冲响应在经过了有限数k 拍以后就变为零,过渡过程结束。
式(4-4)表明了离散系统中,为了使过渡过程较快地结束应符合的条件。
K 是个有限值,它至少应该是什么数值呢?可以分析一下闭环传递函数H(z)。
将式(4-4)代入D(z)表示式,得)]([)()(1)(1)()(1)(z F z z F z G z H z H z G z D k -⋅=-⋅=(4-5) 如果m 和n 分别为对象和保持器的组合脉冲传递函数G(z)的分子和分母的阶次,l 为式(4-5)中F(z)的阶次,要使D(z)能实现,就应使分母的阶次大于分子的阶次k n m l ≥-+ (4-6)由式(4-6)可见,当0l =时,H(z)的分子0()F z F ==常数,暂态响应的持续节拍数最少。
式中n 和m 是由对象、保持器决定的,是不可变部分。
这时应有k n m ≥- (4-7)这是过渡过程所能达到的最低极限节拍数,它规定了“最少拍”的极限数。
2)无稳态误差的最小拍系统 由王勤主编教材P89~P90的理论推导,可以知道,为保证系统稳态误差为零且拍数最少,应取111()(1)()k H z z F z --=-(4-8)其中1()F z 为不包含G(z)的零点和极点的多项式。
为式(4-8)表示了无稳态误差的最少拍系统,其1()H z -满足的条件。
另外,为了使系统的暂态过程在有限时间内结束,H(z)必须是1z -的有限多项式。
这两者都要满足,因而应使1()F z 为1z -的有限多项式。
最简单的情况是1()1F z =,这时 (1)对阶跃输入11()1H z z --=-1()H z z -=因而11)(11)(1)(1)()(1)(11-⋅=-⋅=-⋅=--z z G z z z G z H z H z G z D (2)对斜坡函数输入121()(1)H z z --=-或 12()2H z zz --=-从而有 22121)1(12)(1)1(2)(1)(--⋅=--⋅=---z z z G z z z z G z D (3)对加速度函数输入131()(1)H z z --=-或 123()33H z zz z ---=-+从而有 3231321)1(133)(1)1(33)(1)(-+-⋅=-+-⋅=----z z z z G z z z z z G z D3)无纹波,无稳态误差的最少拍系统 用前述方法设计的最少拍控制系统,对于符合原设计的输入信号能很快地跟踪。
然而,如果进一步用改进的z 变换法来研究所设计的系统,就会发现问题。
这种改进的z 变换不仅能求出采样时刻的系统输出,而且可以研究采样间隔中,输出的变化情况。
用这种z 变换将发现用前述方法设计的系统,在采样时刻之间存在着波动。
有纹波的系统,在采样时刻之间存在误差,而且功率损耗、振动等也很大,它将加快执行机构等可动部件的磨损。
为此,必须改进设计方法,使设计出的系统满足无纹波的条件。
(1)最少拍系统产生纹波的原因 经分析可知,最少拍系统虽然经过有限拍后能使采样时刻的稳态误差为零,从而使数字控制器的离散输入量E(z)为零。
但控制器的输出并没有达到稳态值,仍然是上下波动的。
亦即控制器的输出U(z)不能在有限拍内变为零。
如果整个系统以U(z)为输出量,设这时的闭环传递函数为()D H z 。
同样,如果这一闭环传递函数也能表示成极点都在z 平面原点的形式,则过渡过程也能在有限拍内结束。
(2)无纹波最少拍系统的设计 根据王勤主编教材P93的理论推导可知,无纹波最少拍系统的闭环传递函数应分别为0()()()()k kF z P z F z H z z z == (4-9) 0()()()D kF z Q z H z z = (4-10) 式中:()()()P z G z Q z =,0()F z 为z 的多项式。
上述传递函数能保证系统的输出Y(z)和控制器输出U(z)的暂态过程均能在有限拍内结束。
式(4-9)说明,无纹波最少拍系统的闭环传递函数H(z)不仅应为1z -的多项式,而且应包含G(z)的全部零点。
由式(4-5)可得)()()()()(1)()(1)(00z P z F z z Q z F z H z H z G z D k -=-⋅=在最简单的情况下,0()F z 为常数。
为了保证D(z)是可实现的,至少要使k 大于或等于Q(z)的阶次,即k n ≥ (4-11)将式(4-7)与式(4-11)相比,发现由于要求无纹波,系统的最少拍增加了m 拍,响应的暂态过程也延长m 拍。
4)斜坡输入下最少拍系统设计举例(1)斜坡输入下无稳态误差最少拍系统设计 设被控对象为二阶系统,其传递函数为)1()(1+=s T s Ks G对于二阶被控对象加零阶保持器后对象的传递函数为:)1(1)(1+⨯-='-s T s Ks e s G TS 选择采样周期T ,将上述传递函数离散后得)1)(1()()()(112111111111------------++-=z ez z TeeT T z eT T T Kz G T T T T T T T T因为输入是单位斜坡信号,所以选择:21)1()(1--=-z z H 212)(---=z zz H)1)(1()1)(2(])())[(1()1)(2()(1)()(1)()()(11111111111111111-------------+---=--++----=-⋅==Bz z KA z e z z TeeT T eT T T z K z ez z H z H z G z E z U z D T T T T T T T T T T2121)1(1)21(2111--------+++-=Bz z B z e z e KA T T T T 其中 111T e T T A T T -+=-,ATeeT T B T T T T 1111----=由此可得斜坡输入下最少拍算法的数字控制器算法为u(k)=(1-B)u(k-1)+Bu(k-2)+)2()1(21)(211//-+-+---k e KAe k e KA e k e KA T T T T(2)斜坡输入下无纹波、无稳态误差最少拍系统设计)1)(1()1()1)(1()()()(11111121111111111---------------+=----++-=z ez Bz z KAz e z z TeeT T z eT T T Kz G T T T T T T T T T T①保证系统在斜坡输入下的稳态误差为零,则系统的闭环传递函数应符合1211()(1)()H z z F z --=-②稳定性原则1()H z -应包含G(z)的不稳定极点,其形式为1211()(1)()H z z F z --=-,其中1()F z 为不包含G(z)的零点和极点的多项式。
上式和保证稳态误差为零的要求相同。
()H z 应包含G(z)的不稳定零点,其形式为12()(1)()H z Bz F z -=+,其中2()F z 为不包含G(z)的零点和极点的多项式。
③无纹波有限拍暂态过程为了实现无纹波,2()F z 中必须包含G(z)的分子上的另一因子1z -。
要寻找()H z 、1()F z 和2()F z 的形式,使它们的项数最少(即最小实现)而又满足上述条件。
显然应为110()1F z b z -=+ 11201()()F z c c z z --=+1111201()(1)()(1)()H z Bz F z Bz z c c z ----=+=++联立求解得122320+++=B B B c ,12)12(21+++-=B B B c ,12)1(20+++=B B B B b 所以有)1)(1())(1()(1)()(1)()()(10111011-----+-+-=-⋅==z b z KA z c c z e z H z H z G z E z U z D T T 2010211010)1(1)(111--------+--+=z b z b z e c z ec c c KAT T T T由此可得斜坡输入下最少拍无纹波的算法:)2()1()()2()1()1()(11101000----++-+--=--k e KAec k e KA ec c k e KA c k u b k u b k u T T T T四、实验步骤1、仔细阅读“PCI-1711数据采集卡驱动函数说明.doc ”和“THJK-Server 软件使用说明.doc ”文档,掌握PCI-1711数据采集卡的数据输入输出方法和THJK-Server 软件(及相关函数)的使用方法。
2、模拟对象的模拟电路图如图4-2下所示:图4-2 模拟对象电路其中:R1=100K,R2=100K,R3=100K,C1=10uF,C2=10uF按上图连接一个积分环节和一个惯性环节组成的二阶被控对象的模拟电路;3、系统接线图如图4-3所示:图4-3 系统接线图按照上图接线。