ABB外轴参数调整手册
ABB定位器调试步骤(一口清)

ABB定位器调试步骤(一口清)1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(4- 6 BAR)。
2. 接通 4---20mA 输入信号。
(定位器的工作电源取自输入信号,由 DCS 二线制供电,不能将 DC24V 直接加至定位器,否则有可能损坏定位器电路)。
3. 检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住 MODE 键。
•并同时点击⇧或⇩键,直到操作模式代码 1.3 显示出来。
•松开 MODE 键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移 20 度,无需严格对称)直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
全行程角度应不小于 25º4. 切换至参数配置菜单•同时按住⇧和⇩键•点击 ENTER 键•等待 3 秒钟,计数器从 3 计数到 0•松开⇧和⇩键程序自动进入 P1.0 配置菜单。
5. 使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心, 一般角位移为 90º直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于 60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
出厂时的缺省设置为:linear6. 启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):方法 1:•按住 MODE 键•点击⇧键一次或多次,直到显示出“P1.1”•松开 MODE 键•按住 ENTER 键直到计数器倒计数到 0 •松开 ENTER 键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
ABB工业机器人操作手册
目录一、系统安全 (1)二、手动操纵工业机器人 (1)1.单轴运动控制 (1)2.线性运动与重定位运动控制 (3)3.工具坐标系建立 (5)4.示教器上用四点法设定TCP (6)操作方法及步骤如下: (6)三、程序建立 (10)1.建立RAPID程序 (10)2.基本RAPID程序指令 (11)(1)赋值指令 (11)(2)常用的运动指令 (12)(3) I/O控制指令 (14)1)Set数字信号置位指令 (14)2)Reset数字信号复位指令 (15)3)WaitDI数字输入信号判断指令 (15)4)WaitDO数字输出信号判断指令 (15)5)WaitUntil信号判断指令 (15)(4)条件逻辑判断指令 (15)1)Compact IF紧凑型条件判断指令 (15)2)IF条件判断指令 (16)3)FOR重复执行判断指令 (16)4)WHILE条件判断指令 (16)一、系统安全以下的安全守则必须遵守,因为机器人系统复杂而且危险性大,万一发生火灾,请使用二氧化炭灭火器。
急停开关(E-Stop)不允许被短接。
机器人处于自动模式时,不允许进入其运动所及的区域。
在任何情况下,不要使用原始盘,用复制盘。
.搬运时,机器停止,机器人不应置物,应空机。
意外或不正常情况下,均可使用E-Stop键,停止运行。
在编程,测试及维修时必须注意既使在低速时,机器人仍然是非常有力的,其动量很大,必须将机器人置于手动模式。
气路系统中的压力可达0. 6MP,任何相关检修都要断气源。
在不用移动机器人及运行程序时,须及时释放使能器(EnableDevice)。
调试人员进入机器人工作区时,须随身携带示教器,以防他人无意误操作。
在得到停电通知时,要预先关断机器人的主电源及气源。
突然停电后,要赶在来电之前预先关闭机器人的主电源开关,并及时取下夹具上的工件。
维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程序及参数。
abb机器人外部轴的独立轴

abb机器人外部轴的独立轴
ABB机器人的外部轴通常被称为第七轴,它是指机器人手臂外部的可旋转或可移动部分。
这个轴可以根据需要进行定制,以便机器人可以在工作站之间进行移动或旋转,从而扩大其工作范围和灵活性。
第七轴通常由一个轨道或导轨系统支撑,使机器人能够在不同的位置之间进行移动。
它可以是直线轨道,也可以是环形轨道,取决于具体的应用需求。
通常,第七轴上还会安装有与机器人控制系统相连接的传感器和电缆,以确保机器人能够正常运行并接收控制信号。
第七轴的安装和配置需要根据具体的应用需求进行设计,包括轨道的长度、形状和材料选择等。
同时,还需要考虑机器人与第七轴的连接方式和安全性,以确保机器人在运动过程中的稳定性和安全性。
总之,ABB机器人的外部轴(第七轴)是机器人手臂外部的可移动部分,通过安装在轨道上实现机器人的移动或旋转,从而扩大其工作范围和应用灵活性。
ABB 外轴参数调整手册

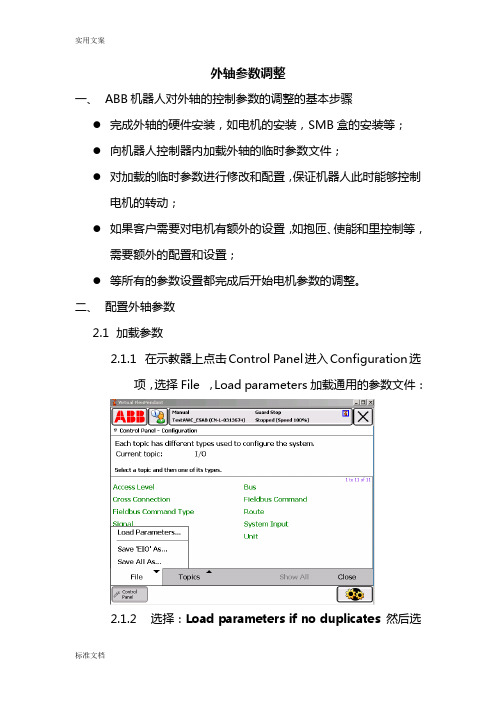
外轴参数调整一、ABB机器人对外轴的控制参数的调整的基本步骤完成外轴的硬件安装,如电机的安装,SMB盒的安装等;向机器人控制器内加载外轴的临时参数文件;对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;等所有的参数设置都完成后开始电机参数的调整。
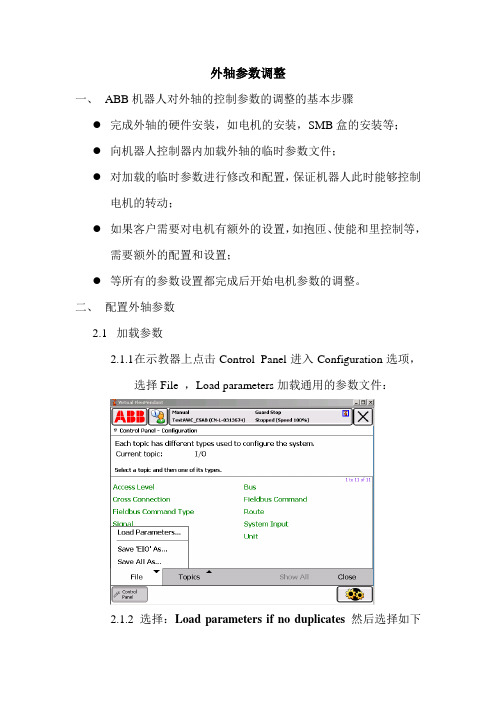
二、配置外轴参数2.1加载参数2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:2.1.2选择:Load parameters if no duplicates 然后选择如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX \utility\ Additional Axis\DM1\General,然后选择相应的文件加载;2.1.3重启系统。
2.2配置参数2.2.1在Motion中选择Mechanical Unit并且定义如下参数NameStandby State: Yes/NoActivate at Start UpDeactivation ForbiddenUse Single 12.2.2在Motion中选择Single定义Single;NameSingle2.2.3在Motion中选择Single Type定义外轴的种类;有以下几种选项可以选择:TRACK; FREE_ROT; EXT_POS; TOOL_ROT;2.2.4在Motion中选择Joints,为外轴指定外轴的序号;如:第10个轴对应与robtarget中的eax_d2.2.5在Motion中选择Arm,定义外轴的运动范围;Upper Joint Bound;Lower Joint Bound;2.2.6在Motion中选择Accelerarion Data,定义外轴加速和减速运动参数;Nominal Acceleration;Nominal Deceleation;2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)Transmission Gear Ratio;Rotating MoveTransmission High GearTransmission Low Gear2.2.8在Motion中选择Motor Type,定义下面的参数;(这些参数有电机供应厂商提供)Pole parisKe Phase to phase (Vs/Rad)Max current (A)Phase resistance(ohm)Phase inductance(H)2.2.9在Motion中选择Motor Calibration,定义下面的参数;Calibration offset;通过Fine calibration获得;Commutator offset:电机供应商提供;2.2.10在Motion中选择Stress Duty Cycle,定义最大扭矩和最快转速;Torque Absolute Max;Speed Absolute Max;Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:Torque Absolute Max < 1.732 ×Ke Phase to Phase×Max Current;通过计算出的值适当的减小(5~10);2.2.11重启系统;三、参数调整3.1.检测电机的连接正确性这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:寻找同步永磁电机的Commutation的值;检查电机的相序是否正确;检查电机的电机对是否设置正确;检查Resolver的连接是否良好。
ABB机器人操作及维护手册
版)。《使用指南 User’s Guide 》与《产品手册 Product Manual 》。
ABB FLEXIBLE AUTOMATION
2 - 40
ENGINEERING ( SHANGHAI ) LTD.
ABB FLEXIBLE AUTOMATION 10 - 40
ENGINEERING ( SHANGHAI ) LTD.
4.3 机 器 人 当 前 位 置 显 示 :
ABB 机 器 人 操 作 手册
进入操纵窗口后,在显示屏右侧 Robot pos 会显示 机器人当前位置。 当机器人运动模式为直线运动或姿态运动时,显示
RAPID Reference 编程手册,介绍如何编程。
ABB FLEXIBLE AUTOMATION
9 - 40
ENGINEERING ( SHANGHAI ) LTD.
ABB 机 器 人 操 作 手册
第四章 机器人示教
手动操作机器人: 4.1 操 纵 窗 口 切 换 :
将机器人操作模式选择器置于手动限 速模式。
对文件中可能出现的错误,上海 ABB 工程有限公司不对此承担责任。 对于使用此文件或者此文件提及的软硬件所导致的部分或者严重性错
误, 上海 ABB 工程有限公司无论如何不对此承担责任。 没有上海 ABB 工程有限公司书面允许,此文件的任何部分不得拷印或
复制,并且其中内容也不能转于第三方和用作非法目的。否则将追究 其法律责任。 文 件 中 如 有 不 详 尽 处 , 参 阅 << User Guide >>、<< Product Manual >>、<< RAPID Reference Manual >>。
ABB机器人常用指令详解-中文(二)
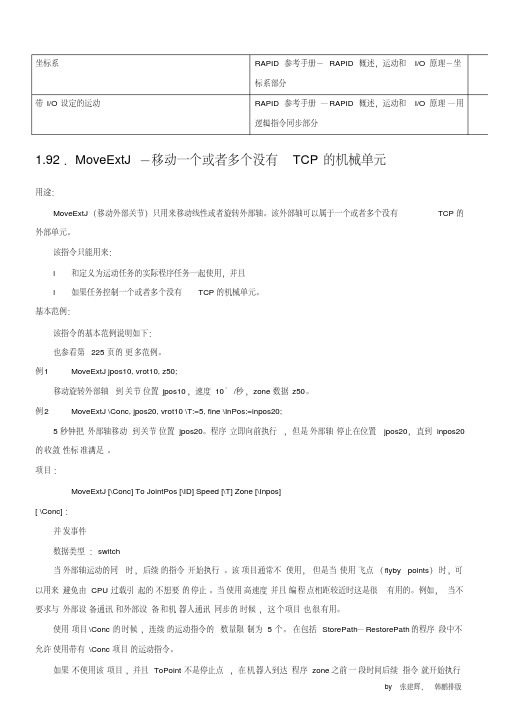
例2
MoveExtJ \Conc, jpos20, vrot10 \T:=5, fine \InPos:=inpos20;
5 秒钟把 外部轴移动 到关节 位置 jpos20。程序 立即向前执行 , 但是 外部轴 停止在位置 jpos20, 直到 inpos20 的 收敛 性标 准满足 。 项目 :
MoveExtJ [\Conc] To JointPos [\ID] Speed [\T] Zone [\Inpos]
要求与 外部设 备通讯 或外部设 备 和机 器人通讯 同步的 时候 , 这 个项目 也 很有用。
使用 项目 \Conc 的 时候 ,连续 的运动指令的 数量限 制为 5 个。 在包括 StorePath— RestorePath 的程序 段中不
允许 使用带有 \Conc 项目 的运动指令。
如果 不使用该 项目 ,并且 ToPoint 不是停止点 ,在 机 器人到达 程序 zone 之前 一 段时间后续 指令 就开始执行
TCP 的
该指令只能用来:
l 和定义为运动任务的实际程序任务一起使用,并且 l 如果任务控制一个或者多个没有 TCP 的机械单元。 基本范例:
该指令的基本范例说明如下:
也参看第 225 页的 更 多范例。
例1
MoveExtJ jpos10, vrot10, z50;
移动旋转外部轴 到 关节 位置 jpos10 ,速度 10° /秒 ,zone 数据 z50。
基本范例:
该指令的基本范例说明如下:
也可参看第 228 页 更 多指令。
例 1 MoveJ p1, vmax, z30, tool2;
工具 tool2 的 TCP 沿着 一个 非 线性 路径 到位置 p1, 速度数据是 vmax, zone 数据是 z30。
ABB外轴全参数调整手册簿
外轴参数调整一、ABB机器人对外轴的控制参数的调整的基本步骤●完成外轴的硬件安装,如电机的安装,SMB盒的安装等;●向机器人控制器内加载外轴的临时参数文件;●对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;●如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;●等所有的参数设置都完成后开始电机参数的调整。
二、配置外轴参数2.1加载参数2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:2.1.2选择:Load parameters if no duplicates 然后选择如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX \utility\Additional Axis\DM1\General,然后选择相应的文件加载;2.1.3重启系统。
2.2配置参数2.2.1在Motion中选择Mechanical Unit并且定义如下参数●Name●Standby State: Yes/No●Activate at Start Up●Deactivation Forbidden●Use Single 12.2.2在Motion中选择Single定义Single;●Name●Single2.2.3在Motion中选择Single Type定义外轴的种类;有以下几种选项可以选择:TRACK; FREE_ROT; EXT_POS; TOOL_ROT;2.2.4在Motion中选择Joints,为外轴指定外轴的序号;如:第10个轴对应与robtarget中的eax_d2.2.5在Motion中选择Arm,定义外轴的运动范围;●Upper Joint Bound;●Lower Joint Bound;2.2.6在Motion中选择Accelerarion Data,定义外轴加速和减速运动参数;●Nominal Acceleration;●Nominal Deceleation;2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)●Transmission Gear Ratio;●Rotating Move●Transmission High Gear●Transmission Low Gear2.2.8在Motion中选择Motor Type,定义下面的参数;(这些参数有电机供应厂商提供)●Pole paris●Ke Phase to phase (Vs/Rad)●Max current (A)●Phase resistance(ohm)●Phase inductance(H)2.2.9在Motion中选择Motor Calibration,定义下面的参数;●Calibration offset;通过Fine calibration获得;●Commutator offset:电机供应商提供;2.2.10在Motion中选择Stress Duty Cycle,定义最大扭矩和最快转速;●Torque Absolute Max;●Speed Absolute Max;Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:Torque Absolute Max< 1.732 ×Ke Phase to Phase×Max Current;通过计算出的值适当的减小(5~10);2.2.11重启系统;三、参数调整3.1.检测电机的连接正确性这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:●寻找同步永磁电机的Commutation的值;●检查电机的相序是否正确;●检查电机的电机对是否设置正确;●检查Resolver的连接是否良好。
02-4 ABB机器人的手动操纵

2.4 ABB 机器人的手动操纵手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。
下面我们就来学习一下如何手动操纵机器人进行这三种运动。
2.4.1 单轴运动的手动操纵一般地,ABB 机器人是由6个伺服电机分别驱动机器人的6个关节轴,那么每次手动操纵一个关节轴的运动,我们就称之为单轴运动。
以下就是手动操纵单轴运动的方法:将控制柜上机器人状态钥匙切换到中间的手动限速状态。
在状态栏中,确认机器人的状态已切换为“手动”。
点击“ABB ”按钮。
电源总开关急停开关上电\复位机器人状态选择“手动操纵”。
点击“动作模式”。
选中“轴1-3”,然后点击“确定”。
选中“轴4-6”,就可以操纵轴4-6.用左手按下使能按钮,进入“电机开启”状态。
在状态栏中,确认“电机开启”状态。
显示“轴1-3”的操纵杆方向。
黄箭头代表正方向。
操纵杆的使用技巧:我们可以将机器人的操纵杆比作汽车的油门,操纵杆的操纵幅度是与机器人的运动速度相关的。
操纵幅度较小则机器人运动速度较慢。
操纵幅度较大则机器人运动速度较快。
所以大家在操作的时候,尽量以操纵小幅度使机器人慢慢运动,开始我们的手动操纵学习。
2.4.2 线性运动的手动操纵机器人的线性运动是指安装在机器人第六轴法兰盘上的工具在空间中作线性运动。
以下就是手动操纵线性运动的方法:机器人六个轴的位置选择“手动操纵”点击“动作模式”。
选择“线性”,然后点击“确定”。
点击“工具坐标”。
机器人的线性运动是指安装在第六轴法兰盘上的工具在空间中线性运动,所以要在“工具坐标”中指定对应的工具。
选中对应的工具“tool1”。
关于工具数据的建立,请查看本书的第四章第4节的内容。
用左手按下使能按钮,进入“电机开启”状态。
在状态栏中,确认“电机开启”状态。
显示“轴X Y Z”的操纵杆方向。
黄箭头代表正方向。
增量模式的使用:工具的TCP点在空间中线性运动。
操纵杆的使用技巧:我们可以将机器人的操纵杆比作汽车的油门,操纵杆的操纵幅度是与机器人的运动速度相关的。
Abb机器人调试步骤

2015年 03 月 31 日实施Q/RT 20002-2004ABB 机器人调试规范武汉人天包装技术有限公司 发布前言为了培养和加强设计人员、现场安调人员对ABB机器人知识的了解和熟悉,规范安调人员对ABB机器人的调整,特编写《ABB机器人调试规范》。
本标准起草单位:人天公司电气所。
本标准主要起草人: 朱学建。
目录序言............................................................................................................................................................一、安装机器人 ........................................................................................................................................1-1 ABB机器人控制柜1-1-1控制柜的安装21-1-2控制柜的构造1-2机器人本体1-3机器人本体与控制柜的连接二、认识机器人 ........................................................................................................................................三、序列号恢复的运用 ............................................................................................................................四、ABB机器人的基础操作...................................................................................................................4-1语言设置4-2备份与恢复4-2-1备份4-2-2恢复44-3手动机器人4-4校准五、系统I/O配置及接线.........................................................................................................................六、检查信号............................................................................................................................................七、导入程序............................................................................................................................................八、工件坐标系设定 ................................................................................................................................九、校基准点 (49)十、调整参数............................................................................................................................................10-1 微调纸箱的长宽高10-2修改已经码放的纸箱数量710-3微调抓取位置10-4微调码垛摆放位置十一、手动调试 ........................................................................................................................................十二、自动运行 ........................................................................................................................................十三、注意事项 ........................................................................................................................................序言本手册主要针对ABB关节机器人在码垛生产线运用的调试。
ABB参数设定

IDP1._ P2._ P3._ P4._ P5._ P6._ P7._ P8._ P9._ P10._ P11._标识STANDARDSETPOINTACTUATORMESSAGESALARMSMAN_ADJCTRL_PARANLG_OUTDIG_OUTDIG_INFS/IP名称标准设定点执行器信息报警手动调节控制参数模拟输出数字输出数字输入出厂设定,I/P类型参见第53页第57页第61页第64页第67页第70页第74页第84页第87页第89页第91页如需参数总体结构和参数组的概述,请参见附录A。
参数组1:标准P1.0 执行器类型通过这一参数,可以设置TZID-C定位器,用于直线式执行器(传感器范围+/-30°)或旋转式执行器(传感器范围+/-60°)的操作。
无需对装置进行机械改动。
在设定执行器类型后,必须进行Autoadjust。
如选择了错误的执行器,则会造成非线性错误。
选择:LINEAR 直线式执行器ROTARY 旋转式执行器出厂设定:LINEARP 1.1 Autoadjust下列数值由Autoadjust确定:- 执行器的方向- 执行器的冲程距离- 两个方向的冲程时间- 控制参数- I/P模块的偏移如需启动Autoadjust,按住ENTER,直至所显示的从3到0的倒计数结束。
在倒计数过程中,显示用参数P6.4选择的Autoadjust模式。
在Autoadjust运行时,控制回路符号在显示屏中闪烁,同时显示Autoadjust的当前状态,并有如下信息。
可以用参数6.4设定Autoadjust模式。
参数组1:标准必须用ENTER 确认所有信息(“RUN”除外)。
RUNAutoadjust 正在运行。
CALC_ERR 未通过合理性检查。
COMPLETE Autoadjust 成功完成。
BREAK Autoadjust 被操作员停止。
这可通过按下ENTER 而在本地完成。
abb外部轴电机参数
abb外部轴电机参数
ABB外部轴电机的参数取决于具体型号和应用场景,不同型
号和应用场景下的外部轴电机参数可能会有所不同。
一般来说,ABB外部轴电机的一些常见参数包括转速范围、最大电流、
最大扭矩、最大功率以及编码器分辨率等。
以下是一些可能的参数范围:
1. 转速范围:通常在几千到数万转每分钟(rpm)之间,具体
根据不同型号和应用场景而定。
2. 最大电流:通常在几安到几百安之间,具体取决于电机的功率和工作要求。
3. 最大扭矩:通常在几牛米到几百牛米之间,具体取决于电机的功率和工作要求。
4. 最大功率:通常在几千瓦到数十千瓦之间,具体取决于电机的设计和应用需求。
5. 编码器分辨率:通常采用高精度编码器,具体的分辨率可以达到几千到几十万线,用于提供准确的位置反馈。
需要注意的是,以上参数只是一些常见的范围指标,具体的参数还需根据具体型号和应用需求来确定。
abb外部轴电机参数
abb外部轴电机参数摘要:1.ABB 外部轴电机概述2.ABB 外部轴电机参数分类3.ABB 外部轴电机主要参数详解4.ABB 外部轴电机参数选择与应用正文:【ABB 外部轴电机概述】ABB 外部轴电机是一种广泛应用于工业领域的电机,以其高效、可靠、节能的特点受到用户的青睐。
ABB 作为全球电机制造行业的领军企业,其外部轴电机产品在市场上具有很高的知名度和竞争力。
【ABB 外部轴电机参数分类】ABB 外部轴电机的参数繁多,根据其功能和性能,可以将参数分为以下几个类别:1.尺寸和外形参数2.电气参数3.机械参数4.保护参数5.控制参数6.环境参数【ABB 外部轴电机主要参数详解】1.尺寸和外形参数:主要包括电机的尺寸、重量、轴径等,这些参数决定了电机的安装和使用条件。
2.电气参数:主要包括电机的额定电压、额定功率、额定电流、工作效率等,这些参数是评估电机性能和选型的重要依据。
3.机械参数:主要包括电机的转速、扭矩、额定转矩、启动转矩等,这些参数决定了电机的运行性能和负载能力。
4.保护参数:主要包括电机的过热保护、过载保护、短路保护等,这些参数可以确保电机的安全稳定运行。
5.控制参数:主要包括电机的控制方式、信号接口、通信方式等,这些参数决定了电机的控制和使用便捷性。
6.环境参数:主要包括电机的工作温度、湿度、海拔等,这些参数影响了电机的使用寿命和性能。
【ABB 外部轴电机参数选择与应用】在选择ABB 外部轴电机时,需要根据实际应用场景和需求,综合考虑以上各个参数,以达到最佳的使用效果。
在应用过程中,还需要注意电机的安装、维护和保护,确保电机高效、安全地运行。
综上所述,了解和掌握ABB 外部轴电机的参数对于选择和使用电机具有重要意义。
ABB机器人标准指令详解
应用: 当前指令用于软化机器人主机或外轴伺服系 统,软化值范围 0%-100%,软化坡度范 围>=100%,此指令必须与指令 SoftDeact 同时使用,通常不使用于工作位置。
2019/2/5
运动控制指令-SoftAct
实例:
SoftAct 3,20; SoftAct 1,90\Ramp:=150; SoftAct \MechUnit:=orbit1,1,40\Ramp:=120;
实例:
Incr reg1;
等同于
reg1:=reg1+1;
2019/2/5
计数指令-Decr
Decr Name;
MecUnit: 外轴名。
( mecunit )
应用: 使机器人一个外轴失效,例如:当多个外轴 公用一个驱动板时,通过外轴激活指令 DeactUnit 使当前所使用的外轴失效。
2019/2/5
外轴激活指令-DeactUnit
实例:
MoveL p10,v100,fine,tool1; ActUnit track_motion; MoveL p20,v100,z10,tool1; DeactUnit track_motion; ActUnit orbit_a; MoveL p30,v100,z10,tool1;
2019/2/5
运动控制指令-PathResol
实例:
MoveJ p1,v1000,fine,tool1; PathResol 150;
机器人在临界运动状态 ( 重载、高速、路 径变化复杂情况下接近最大工作区域 ), 增加路径控制值,可以避免频繁死机。 外轴以很低的速度与机器人联动,增加路 径控制值,可以避免频繁死机。 机器人进行高频率摆动弧焊时,需要很高 的路径采样时间,需要减小路径控制值。 机器人进行小圆周或小范围复杂运动时, 需要很高精度,需要减小路径控制值。
ABB机器人操作手册-校准
© Copyright 2003-2007, 2010-2011 ABB. 保留所有权利。
3HAC16578-10 修订 : G
3
目表
4
3HAC16578-10 修订 : G
© Copyright 2003-2007, 2010-2011 ABB. 保留所有权利。
手册概述
手册概述
关于本手册
本手册包含使用工具校准摆锤校准机器人的程序。其中介绍了 Calibration Pendulum II 和 Reference Calibration 例行程序。
用途
使用校准摆锤校准期间应使用本手册。
本手册的目标读者
本手册面向: • 安装现场的安装人员。 • 进行维修和维护的维修人员。
前提条件
读者应 • 掌握机器人工作原理的必备知识 • 掌握校准的作用及如何执行校准的基本知识。
各章结构
本手册由以下各章组成:
章节 校准简介 准备设备 校准
内容
有关校准方法的常规信息,包括必备工具的相关信息。 有关在校准之前如何准备设备的信息。 详细说明如何执行校准的程序。本章分为两节内容,每节内容对应一个例 行程序 (Calibration Pendulum II 和 Reference Calibration)。两节 内容说明了例行程序所适用的机器人系统。
3HAC16578-10 修订 : G
文档 ID 3HAC027400-001 3HAC026048-001 3HAC039842-001 3HAC025755-001 3HAC039838-001 3HAC026320-010 3HAC023637-001 3HAC022031-001 3HAC035504-001 3HAC022032-001 3HAC033453-001 3HAC027151-001 3HAC035737-001
ABB电机安装调试指导手册
EN 50281-1-1 ;关于防尘燃, Ex tD 保护的标准 IEC 60079-0 ; 关于爆炸性气体区域一般规定的标准 IEC 60079-2 ; 关于 Ex p 保护的标准 IEC 60079-7 ; 关于 Ex e 保护的标准 IEC 60079-15 ; 关于 Ex nA 保护的标准 IEC 61241-1 ; 关于防尘燃, Ex tD 保护的标准 NFPA 70 ; C 22-1-98 ; 国家电气规范 (NEC) 加拿大电气规范,第 1 部分 (CE 规范)
3BFP 000 052 R0121 REV E
安全指南 - 3
感应电机与发电机手册
维护以及维修
永磁同步电机只能由 ABB 考核并授权的维修车间进行维修。 更多关于永磁同步电机的维 修信息,请联系 ABB。 警告 : 警告 : 警告 : 只有熟悉相关安全规定的合格人员才可打开和维护永磁同步电机。 未使用专用工具,不得拆卸永磁同步电机的转子。 由于打开或者拆卸永磁同步电机或者此类设备的单独转子产生的杂散磁场可能 会干扰或者损坏其他电气或者电磁设备及部件,例如心脏起搏器、信用卡等等。 警告 : 警告 : 松散的金属部件和废物严禁进入永磁同步设备或者接触转子。 在关闭打开的永磁同步电机之前,必须清除电机内部所有不属于该设备的部件 和废物。 注意 : 请注意杂散磁场和旋转永磁同步电机的转子可能产生的感应电压,因为它们可 能损坏周围的设备 (例如车床或者平衡机器) 。
4 - 安全指南
3BFP 000 052 R0121 REV E
感应电机与发电机手册
符合性声明
所有设计用于爆炸性气体区域的 ABB 防爆电机都符合 ATEX 指令 94/9/EC,在铭牌上都 有 CE 标识。
有效性
在电机用于爆炸性气体区域时,这些指南适用于下列 ABB OY 电机。 无火花 Ex nA, Class I Div 2, Class I Zone 2 AMA 感应式电机,机座号 315 至 500 AMB 感应式电机,机座号 560 至 630 AMI 感应式电机,机座号 560 至 630 HXR 感应式电机,机座号 315 至 560 AMZ 同步电机,机座号 710 至 2500 M3GM 感应式电机,机座号 315 至 450
ABB 外轴参数调整手册
外轴参数调整一、ABB机器人对外轴的控制参数的调整的基本步骤●完成外轴的硬件安装,如电机的安装,SMB盒的安装等;●向机器人控制器内加载外轴的临时参数文件;●对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;●如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;●等所有的参数设置都完成后开始电机参数的调整。
二、配置外轴参数2.1加载参数2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:2.1.2选择:Load parameters if no duplicates 然后选择如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX\utility\ Additional Axis\DM1\General,然后选择相应的文件加载;2.1.3重启系统。
2.2配置参数2.2.1在Motion中选择Mechanical Unit并且定义如下参数●Name●Standby State: Yes/No●Activate at Start Up●Deactivation Forbidden●Use Single 12.2.2在Motion中选择Single定义Single;●Name●Single2.2.3在Motion中选择Single Type定义外轴的种类;有以下几种选项可以选择:TRACK; FREE_ROT; EXT_POS; TOOL_ROT;2.2.4在Motion中选择Joints,为外轴指定外轴的序号;如:第10个轴对应与robtarget中的eax_d2.2.5在Motion中选择Arm,定义外轴的运动范围;●Upper Joint Bound;●Lower Joint Bound;2.2.6在Motion中选择Accelerarion Data,定义外轴加速和减速运动参数;●Nominal Acceleration;●Nominal Deceleation;2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)●Transmission Gear Ratio;●Rotating Move●Transmission High Gear●Transmission Low Gear2.2.8在Motion中选择Motor Type,定义下面的参数;(这些参数有电机供应厂商提供)●Pole paris●Ke Phase to phase (Vs/Rad)●Max current (A)●Phase resistance(ohm)●Phase inductance(H)2.2.9在Motion中选择Motor Calibration,定义下面的参数;●Calibration offset;通过Fine calibration获得;●Commutator offset:电机供应商提供;2.2.10在Motion中选择Stress Duty Cycle,定义最大扭矩和最快转速;●Torque Absolute Max;●Speed Absolute Max;Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:Torque Absolute Max< 1.732 ×Ke Phase to Phase×Max Current;通过计算出的值适当的减小(5~10);2.2.11重启系统;三、参数调整3.1.检测电机的连接正确性这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:●寻找同步永磁电机的Commutation的值;●检查电机的相序是否正确;●检查电机的电机对是否设置正确;●检查Resolver的连接是否良好。
ABB机器人独立轴运动设置

ABB机器人独立轴运动设置ABB机器人可以设置单轴旋转而不受软限位的影响,即独立轴运动。
是对于没有硬限位的轴来设置的,可以让轴四或者轴六沿正负方向无限旋转。
一、机器人需要安装选项610-1 Independent Axis;二、以轴6为例设置独立轴。
设置轴6的软限位。
1、在【控制面板】-【配置】-【motion】-【arm】-【rob1-6】下,设置轴6的软限位,并把【Independent Joint】选择为On。
三、关于独立轴的编程指令1、IndCMoveIndCMove(Independent Continuous Movement)用于将轴变更为独立模式,并以指定速度,开始轴的连续运动。
例:IndCMove Station_A,2,-30.5;Station_A的轴2开始以30.5度/秒的速度,朝反方向运动。
2、IndDMoveIndDMove(Independent Delta Movement)用于将轴变更为独立模式,并将轴移动到特定距离处。
例:IndDMove Station_A,2,-30,20;以20度/秒的速度,使Station_A的轴2朝负方向运动30度。
3、IndResetIndReset(Independent Reset)用于将独立轴改变回正常模式。
与此同时,可使旋转轴的测量系统运动许多转。
例:IndCMove Station_A,2,5;MoveL *,v1000,fine,tool1;IndCMove Station_A,2,0;WaitUntil IndSpeed(Station_A,2\ZeroSpeed);WaitTime 0.2IndReset Station_A,2;Station_A的轴2首先以独立模式运动,然后改变回正常模式。
本轴将维持其位置。
注意:当执行指令IndReset时,不得使当前的独立轴和正常轴运动。
这便是先前位置是停止点的原因,并以零速执行IndCMove指令。
ABB机器人外部轴电机选型【技巧】
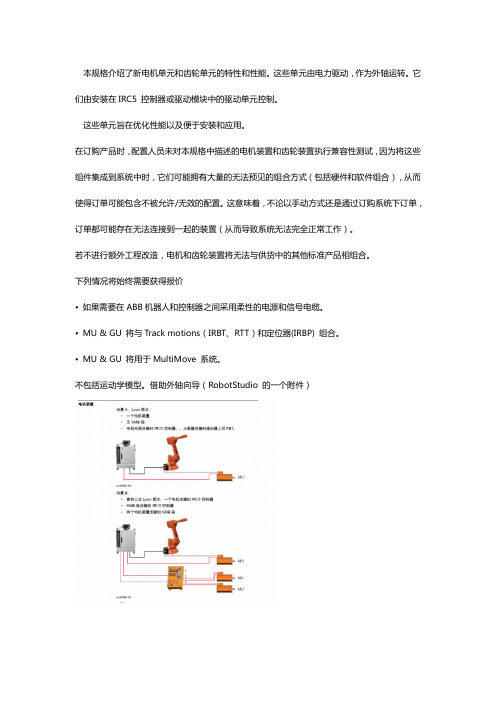
本规格介绍了新电机单元和齿轮单元的特性和性能。
这些单元由电力驱动,作为外轴运转。
它们由安装在IRC5 控制器或驱动模块中的驱动单元控制。
这些单元旨在优化性能以及便于安装和应用。
在订购产品时,配置人员未对本规格中描述的电机装置和齿轮装置执行兼容性测试,因为将这些组件集成到系统中时,它们可能拥有大量的无法预见的组合方式(包括硬件和软件组合),从而使得订单可能包含不被允许/无效的配置。
这意味着,不论以手动方式还是通过订购系统下订单,订单都可能存在无法连接到一起的装置(从而导致系统无法完全正常工作)。
若不进行额外工程改造,电机和齿轮装置将无法与供货中的其他标准产品相组合。
下列情况将始终需要获得报价
•如果需要在ABB机器人和控制器之间采用柔性的电源和信号电缆。
•MU & GU 将与Track motions(IRBT、RTT)和定位器(IRBP) 组合。
•MU & GU 将用于MultiMove 系统。
不包括运动学模型。
借助外轴向导(RobotStudio 的一个附件)
免责申明:⽂章来源于网络综合整理,如⽂意中侵犯您的权益,请及时联系我们删除处理。
abb外置轴坐标修改

abb外置轴坐标修改
请问您指的是哪种ABB机器人外置轴坐标修改?如果是ABB机器人的外置轴坐标系修改,可以通过以下步骤进行操作:
1. 打开ABB机器人的操作系统,登录到机器人控制器。
2. 打开RAPID编程界面。
3. 输入以下命令,以切换到用户外置轴坐标系:
$EXTERNAL_TRACK_MOTION=TRUE;
4. 输入以下命令,以设置用户外置轴坐标系的位置和方向:
$POSE_EXT〈〉:=[X,Y,Z,A,B,C];
其中,X、Y、Z分别表示用户外置轴坐标系的位置坐标,A、B、C分别表示用户外置轴坐标系的方向。
5. 执行以上命令后,即可成功修改ABB机器人的外置轴坐标系。
如果需要恢复机器人的默认坐标系,只需输入以下命令:
$EXTERNAL_TRACK_MOTION=FALSE;
请注意,以上操作需要谨慎进行,使用前请先备份当前机器人程序,以免误操作造成机器人损坏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
外轴参数调整一、 ABB机器人对外轴的控制参数的调整的基本步骤●完成外轴的硬件安装,如电机的安装,SMB盒的安装等;●向机器人控制器内加载外轴的临时参数文件;●对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;●如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;●等所有的参数设置都完成后开始电机参数的调整。
二、配置外轴参数2.1加载参数2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:2.1.2选择:Load parameters if no duplicates 然后选择如下路径加载参数:Mediapool\RobotWare_5.XX.XXXX \utility\Additional Axis\DM1\General,然后选择相应的文件加载;2.1.3重启系统。
2.2配置参数2.2.1在Motion中选择Mechanical Unit并且定义如下参数●Name●Standby State: Yes/No●Activate at Start Up●Deactivation Forbidden●Use Single 12.2.2在Motion中选择Single定义Single;●Name●Single2.2.3在Motion中选择Single Type定义外轴的种类;有以下几种选项可以选择:TRACK; FREE_ROT; EXT_POS; TOOL_ROT;2.2.4在Motion中选择Joints,为外轴指定外轴的序号;如:第10个轴对应与robtarget中的eax_d2.2.5在Motion中选择Arm,定义外轴的运动范围;●Upper Joint Bound;●Lower Joint Bound;2.2.6在Motion中选择Accelerarion Data,定义外轴加速和减速运动参数;●Nominal Acceleration;●Nominal Deceleation;2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)●Transmission Gear Ratio;●Rotating Move●Transmission High Gear●Transmission Low Gear2.2.8在Motion中选择Motor Type,定义下面的参数;(这些参数有电机供应厂商提供)●Pole paris●Ke Phase to phase (Vs/Rad)●Max current (A)●Phase resistance(ohm)●Phase inductance(H)2.2.9在Motion中选择Motor Calibration,定义下面的参数;●Calibration offset;通过Fine calibration获得;●Commutator offset:电机供应商提供;2.2.10在Motion中选择Stress Duty Cycle,定义最大扭矩和最快转速;●Torque Absolute Max;●Speed Absolute Max;Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:Torque Absolute Max < 1.732 ×Ke Phase to Phase×Max Current;通过计算出的值适当的减小(5~10);2.2.11重启系统;三、参数调整3.1.检测电机的连接正确性这段主要讲述应用ABB标准的程序Commutation来验证电机参数是否配置合理,主要验证以下几项功能:●寻找同步永磁电机的Commutation的值;●检查电机的相序是否正确;●检查电机的电机对是否设置正确;●检查Resolver的连接是否良好。
3.1.1在Motion中选择Drive system,将Current_vector_on设置为TRUE,然后重新启动系统,并且运行程序Commutation;Debug → Call Service Routine → Commutation。
3.1.2检查电机的相序连接是否正确;通过示校器控制电机的相正方向旋转,从安装杆看相电机,如果旋转方想为顺时针方向,则电机的相序连接正确,如下图所示:如果电机旋转方向不正确,则可以通过改变接线方式来纠正:如将RST改为SRT,RTS,TSR等。
3.1.3检测电机的电极对,单步执行Commutaion程序,则每执行一步电机会旋转1/16圈。
3.1.4检测Resolver的连接,单步执行Commutation程序,如果Resolver连接正确,电机转动的角度会增加。
3.2.调整Commutaion的值需要准备一个24V的直流电源和继电器。
ABB的标准电机的Commutation offset值都为1.5708。
●禁止电机(Deactivate the motor);●关闭Controller;●将电机的电源线拔开;●将电机和齿轮箱分离(主要是为了防止电机受齿轮箱摩擦力的干扰);●在电机的松匝信号两端接上开关信号,保证随时可以使电机松匝;●先将电机松匝,将另一组24V的电源的正极接到S级(V级),将0V接到T级(W级)。
注意:不要直接将电源的正负级接到线圈上去,需要24V和0V之间串连一个继电器的线圈,以保证不烧毁电源。
接上电源后,断开电源,此时电机已经回到正确的Commutation 位置,如果在接上电源,电机应该不会再转动。
●将电机的松匝信号解开,电机抱匝;●将电机再次连接到机器人控制器上,重新启动系统,不要转动任何机械部件;●打开Test Signal Viewer,Mechanical unit 选择Resolver_angle,观看Resolver_angle的值,将正确的值输入Commutation offset中。
3.3.按照下图设置Test signal Viewer设置:speed 和 torque_ref注意:具体的Test signal Viewer操作参看手册ABBTest Signal Viewer 1.3.pdf;3.4.初步调整Kv,Kp,Ti;3.4.1 调整Kv(方法一)●将Lag control master 0 中的参数 FFW Mode 设置为No;●将Kp设置为5(记录Kp的初始值);将Ti设置为10(记录Ti的初始值),重启系统让新的参数生效;●按照下列程序逐步增加Kv的值,增幅为10%,观看Testsignal viewer中的Torque_ref信号,当电机出现不稳定,即电机有明显的振动和声音,停止运行程序。
MODULE Kv_tunePROC main()VAR num i;VAR num per_Kv;VAR num Kv;TuneReset;FOR i FROM 0 TO 40 DOper_Kv:=100+10*i;Kv:=1*per_Kv/100;TPErase;TPWrite "per_Kv = "\Num:=per_Kv;TPWrite "Kv = "\Num:=Kv;TuneServo STN1,1,100\Type:=TUNE_KP;TuneServo STN1,1,100\Type:=TUNE_TI;TuneServo STN1,1,per_Kv\Type:=TUNE_KV;MoveJ p1,v1000,z50,tool0;MoveJ p2,v500,z50,tool0;MoveJ p1,v1000,z50,tool0;WaitTime 1;ENDFORENDPROCENDMODULE通过Test signal Viewer可以十分清楚的看见电机的不稳定的状况:记录此时的Kv的值,将Kv/2的值输入到系统参数中,重新启动系统。
调整Kv方法二:采用ABB提供的标准的外轴调整软件,tune master进行参数调整,如下图所示,当电机的速度出现明显的抖动,然后将此Kv值除以2Kv值越大变位机的速度响应越快,但是过快容易造成电机的不稳定和抖动,通常Kv=0.6~1.5之间。
3.4.2 调整Kp(方法一)●保持刚调整玩的Kv值不变,将Kp值改回到原来的初始值,依然保证Ti为10;●按10%的比例逐步增加Kp的值,观察Test signal viewer中的Torque_ref信号,直到见到Test signal viewer中的Overshot现象为止;MODULE kp_tunePROC main()VAR num i;VAR num per_Kp;VAR num Kp;TuneReset;FOR i FROM 0 TO 20 DOper_Kp:=100+10*i;Kp:=5*per_Kp/100;TPErase;TPWrite "per_Kp = "\Num:=per_Kp;TPWrite "Kp = "\Num:=Kp;TuneServo STN1,1,100\Type:=TUNE_KV;TuneServo STN1,1,100\Type:=TUNE_TI;TuneServo STN1,1,per_Kp\Type:=TUNE_KP;MoveJ p1,v1000,z50,tool0;MoveJ p2,v500,z50,tool0;MoveJ p1,v1000,z50,tool0;WaitTime 1;ENDFORENDPROCENDMODULE将Kp减1,即Kp=Kp-1,将所得的值输入到系统中,重启系统;调整Kp(方法二)采用ABB提供的标准的外轴调整软件,tune master进行参数调整,如下图所示:保证绿线尽量的接近红线,但是不要出现过冲现象,如果没有出现明显的过冲现象,则参看力矩曲线(蓝线所示),如果蓝线出现明显的振荡曲线,则表示此时参数已经合适。
上诉两种方法区别:第一种方法采用精度高,调试效率低;第二种方法,精度低,调试效率高。
通常情况下Kp值越大,电机的定位精度越高,但是过大时容易造成电机的振动,对电机损伤大,对于大负载的变位机,通常Kp为20左右,对于小负载的变位机,Kp通常为35左右,具体调整大小视情况而定。
3.4.3 调整Ti(方法一)●保持刚调整完毕的Kv和Kp值不变,将Ti设置为1;●将Ti的值按10%的步长递减,观察Test signal viewer的Torque-ref,直到见到overshot为止。