pontryagin最小值原理
埃德蒙兹最小对集算法
埃德蒙兹最小对集算法埃德蒙兹最小对集算法,这个名字听起来好像很高大上,像是某个数学天才的专利,听上去离我们普通人很远,其实不然。
说白了,它就是用来解决图论中一个特别棘手的问题:在一个图里,怎么找到一个最小的“对”集合。
你可能会问,什么是“对”?简单来说,图中的“对”就是两个点之间的连接关系。
我们做的事情其实很简单,就是要找出那些被连接在一起的点对,最少的数量,能够保证图中的每个点都能“搭伙”,不管它们之间有多远,永远不孤单。
你想啊,如果你看一个图,里面有一堆点,这些点通过边连起来,有些点就会一个人待着,没人和它连成对,这时候就很尴尬了。
就像你去参加聚会,结果发现自己一个人待在角落里,连个伴都没有,那可不太好。
所以我们就得想办法,找到一些“搭配”,让这些孤零零的点能够尽量有伴。
我们不要求多,只要最少的对就行了。
说到这里,你是不是感觉自己突然有点明白了?这就像在一次拼图游戏里,怎么把碎片拼在一起,用最少的拼图块拼出完整的图形。
嗯,思路差不多。
其实埃德蒙兹最小对集算法的核心,就是一种贪心的策略。
就是说,它会从当前最容易处理的部分开始,逐步“贪婪”地找到那些可以连接起来的点。
你知道的,贪心这种东西可不是什么坏事,前提是你不贪得无厌。
它首先会从那些已经有很多连接的点开始,找出它们和其他点的最短路径,然后尽量把这些点都连接上。
就像你在做菜时,看到锅里有点油了,就先把锅热一热,再往里面加其他配料,一步步来,不能着急。
但别看它贪心,实际上,这个算法一点都不简单。
你得小心谨慎地操作,每次选择最合适的点,不能随便挑。
因为如果你没有处理好,最后可能会出现“过度连接”的情况,反而多了很多不必要的点对。
你想,做个项目就像做饭,一开始可能做得风生水起,结果最后发现加盐加多了,整个菜都咸得要命。
算法也是一样,一旦选错了路径,就可能让整个图变得不那么完美,甚至还得重新来过,得不偿失。
再说回埃德蒙兹最小对集算法,它的一个大招就是“增广路径”。
Lecture 07 最小值原理

H (xf , λf ,u f ) = 0
若能知道λ (0)的值,就能根据协态方程解得最优控制
λ (t ) = exp(− AT t )λ0 , u * = − sgn( BT exp(− AT t )λ0 )
如果λ T b j ≠ 0, 可以确定最优控制 u * = − sgn(λ T b j ); j 如果λ T b j = 0, 则不能确定u *。 j 如果λ T b j = 0只在t的离散点上成立,则在这些点上u *作边界 j 值的切换; 如果λ T b j = 0在某一段时间间隔成立,这时无法确定u *j的值
5.1 最小值原理
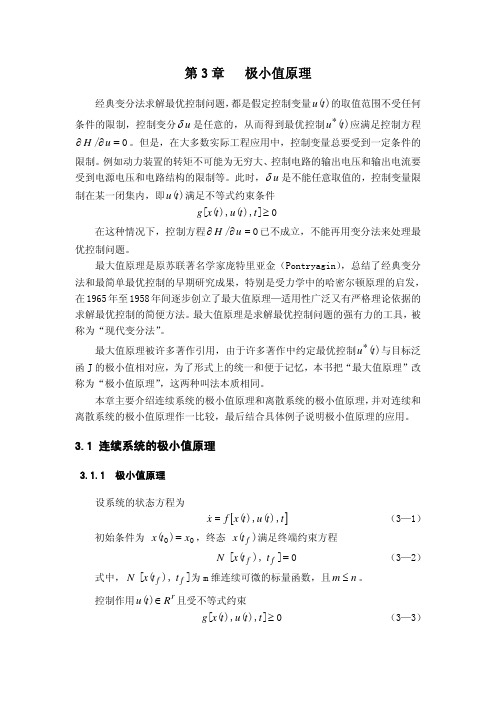
系统运动方程 & x = f ( x, u, t ) 式中:x ∈ Rn − 状态变量;u ∈ Rm − 控制变量;t ∈[t0 , t f ] − 时间变量。 给定系统的初始时刻和初始状态 x(t0 ) = x0 系统的终端时刻和状态满足r个约束方程 n( x(t f ), t f ) = 0 控制变量满足若干不等式约束 g (u, t ) ≤ 0 最优控制问题的性能指标为 J = θ ( x(t f ), t f ) + ∫ φ ( x, u, t )dt
关于判别线性定常系统最优控制问题的正规性和奇异性, 有以下定理。 & 定理7-1 对于线性定常系统x=Ax+Bu 快速最优控制奇异的充要条件是,m个矩阵 Uj = [b j Ab j A2b j K An −1b j ], j = 1, 2,K , m 中,至少有一个是奇异的。 定理7-2 定理7-3ห้องสมุดไป่ตู้对于线性定常系统,快速最优控制正规的充要条件是: 对于正规快速最优控制问题,其最优控制律u*的每一个 m个矩阵Uj全部是非奇异的。
(1)快速最优控制的正规与奇异问题 定义7-1 若所有函数λ T b j 在时间间隔[0,tf ]上只存在有限个零点,则 对应的快速最优控制问题成为正规的。 定义7-2 如果对所有j=1,2, ,m,至少存在一个λ T b j函数在某一段时间 K 间隔[t1 ,t2 ]∈[0,tf ]上的取值为零,则对应的快速最优控制问题是奇异 的,并称时间间隔[t1 ,t2 ]为奇异段。 对于正规快速最优控制问题,完全能确定最优控制律u* ,即每个控制分量 u*均在边界值之间切换,且切换点就是λ T b j =0的时刻。这种控制方式成为 j “乒乒控制”。 对于奇异快速最优控制问题,在奇异段[t1 ,t2 ]上不能确定最优控制律,但 不表明最优控制u*不存在。因为在奇异段u*上,H函数与对应的u*无关,u* j j 可以取任意容许值,仍能满足最小值原理。此时快速最优控制不再具有 “乒乒控制”形式
最优控制第2章 极小值原理

(1) 最优状态x*和最优协态 λ* 满足正则方程:
x&(t) =
∂H ∂λ
=
f [ x(t), u(t), t]
λ& = − ∂H
∂x
2015-03-24
10
(2) 在最优状态x*和最优控制u*上哈密顿函数取极小值:
H
(
x
*
(t ),
u
*
(t ),
λ*(t),
t)
=
min
u∈U
H[x
*
(t ),
u(t ),
2015-03-24
20
u
*
(t
)
=
⎧ −1, ⎪⎨−0.5λ2
(t
λ2 (t ), | λ2
)> (t)
2 |≤
2
(∗)
⎪⎩ 1, λ2 (t) < −2
由伴随方程 λ& = −∂H / ∂x 得到:
求解得到:
λ&1(t) = 0, λ&2 (t) = −λ1(t)
λ1(t) = c1, λ2 (t) = −c1t + c2 本例tf自由,因此H函数在最优终端时刻 t*f满足横截条件:
e t −1 H
=
λT
f
(.)
=
λ1(− x1
+
u)
+
λ2 x1
由极小值原理,最优控制应使哈密顿函数取极小值:
H ( x* , u* , λ* , t ) = min H[ x* , u, λ* , t] u∈U
= -m1≤uin≤1{λ1(− x1* + u) + λ2 x1* }
2015-03-24
python 二分法解最小值
python 二分法解最小值二分法在求解函数的最小值问题中是一种非常有效的方法。
在使用二分法时,我们需要首先确定函数的定义域和值域,然后找到函数的最小值所在的区间。
接下来,我们将这个区间分成两部分,分别求出左半部分和右半部分的中点,并计算函数在这两个中点处的值。
如果函数在左半部分的中点处的值小于右半部分的中点处的值,那么我们就可以将右半部分的区间舍去,只保留左半部分的区间。
反之,如果函数在右半部分的中点处的值小于左半部分的中点处的值,那么我们就可以将左半部分的区间舍去,只保留右半部分的区间。
如此往复,直到我们找到函数的最小值。
下面是一个用Python 实现的二分法求解函数的最小值的例子:```pythondef f(x):return (x - 1) ** 2 + 2def binary_search_min(f, left, right, eps):while abs(right - left) > eps:mid = (left + right) / 2if f(mid) < f(mid + eps):right = midelse:left = midreturn (left + right) / 2print(binary_search_min(f, -10, 10, 0.0001))```在这个例子中,我们定义了一个函数 f(x) = (x - 1)^2 + 2,并使用二分法找到了这个函数的最小值。
binary_search_min 函数接受四个参数,分别是要求解的函数、定义域的左端点、定义域的右端点和精度 eps。
在函数中,我们首先计算出左半部分和右半部分的中点 mid,然后分别计算出这两个中点处的函数值。
如果左半部分的函数值小于右半部分的函数值,那么我们就可以将右半部分的区间舍去,只保留左半部分的区间。
反之,如果右半部分的函数值小于左半部分的函数值,那么我们就可以将左半部分的区间舍去,只保留右半部分的区间。
皮擦索斯算法半数原理
皮擦索斯算法半数原理
皮擦索斯算法(Pigeonhole Principle),又称鸽巢原理,是一个简单的计数原理,它指出:如果n个物体要放入m个容器,且n>m,那么至少有一个容器包含两个或更多的物体。
这个原理在日常生活和计算机科学中都有广泛的应用。
皮擦索斯算法半数原理,可以说是该原理的一个特殊情况,即当n=m+1时,至少有一个容器包含两个物体。
这个原理在很多场合下都很有用,特别是在解决一些涉及分配和计数的问题时。
在计算机科学中,皮擦索斯算法半数原理常常被用于解决一些涉及哈希表、数据压缩、算法分析等问题。
例如,在哈希表中,当哈希函数的取值范围小于要存储的元素数量时,根据皮擦索斯算法半数原理,至少有一个哈希值会对应两个或更多的元素,这就可能导致哈希冲突。
因此,在设计哈希表时,需要选择合适的哈希函数和冲突解决方法,以保证哈希表的性能和效率。
此外,皮擦索斯算法半数原理还可以用于证明一些算法的正确性和效率。
例如,在排序算法中,如果要对n个元素进行排序,而可用的存储空间只有n/2,那么根据皮擦索斯算法半数原理,至少有一个存储位置需要存储两个或更多的元素。
这就意味着,在排序过程中,至少需要进行一次比较操作,因此任何排序算法的时间复杂度都不可能低于O(n log n)。
总之,皮擦索斯算法半数原理是一个简单而重要的计数原理,它在日常生活和计算机科学中都有广泛的应用。
通过深入理解和应用这个原理,我们可以更好地解决一些涉及分配和计数的问题,提高算法的效率和性能。
Gauss-Bonnet定理

D
因为曲线 C = C1 ∪ C2 ∪ · · · ∪ Cn 的切向量在这些光滑曲线的交接处有“跳跃”(即角亏).
而这些“跳跃”角就是交接点处的外角是 θi. 类似 C dθ = 2π 的证明, 可知切线绕分段光滑
曲线 C 一周后的转角是
n
n
dθ = 2π − θi,
i=1 Ci
i=1
总结上述, 我们可得下述著名的定理:
§3.3 Gauss-Bonnet 定理
Gauss-Bonnet 定理也许是曲面微分几何中最深刻的定理. 此定理的最初形式是由
Gauss 在一篇著名的讨论曲面上测地三角形(即其三边均为测地弧)的文章中叙述过. 大体
上说, 一个测地三角形 ∆ 的三个内角 α1, α2, α3 之和超过 π 的部分等于 Gauss 曲率 K 在 ∆
χ(D) = F − E + V.
上述定义右边好象与三角剖分有关, 其实不然, χ(D) 与剖分的方式无关, 是曲 面的拓扑不变量. 我们还可指出我们总可把区域 D 三角剖分得很细使每个三角形 落在一个测地坐标系内. 如果分割得不够小, 我们总可再加入一个顶点, 设此点落 在一个 r 多角形内 ( 即有 r 个顶, r 条边的多角形 ) 可得一新的分割. 设这新分割下 面、边、顶的数目为 F¯, E¯, V¯ . 易知 F¯ = F + V − 1, E¯ = E + V, V¯ = V + 1. 故 χ(D) = F¯ − E¯ + V¯ = F − E + V = χ(D). 因此, 我们总可把 D 细分使每个三角形落 在一个测地坐标系内, 故我们又可以假设三角形的每条弧段是测地线.
1 · dA = K dA = 2π − k¯g dt = 2π.
教材第3章极小值原理
(3—13) (3—14)
∫ δ J t f
=∂ ∂tf
⎢⎣⎡Φ + μ T N +
tf tf
+δ
tf
Ψdt
⎤ ⎥⎦
t=t f
δ
tf
=
⎡ ⎢ ⎢⎣
∂Φ ∂t f
+ ∂N T ∂t f
⎤ μ + Ψ⎥ δ t f
⎥⎦ t =t f
(3—15)
[ ] ∫ δ
Jx
=d
xT (t f
)∂ ∂x
Φ + μT N
dt
∫ δ
Jw
=
δ
wT
(t
f
)
∂Ψ ∂ w
t=t f
−
tf t0
δ
wT
d dt
∂Ψ ∂ w
dt
∫ δ
Jz
=δ
zT
(t f
)
∂Ψ ∂ z
t=t f
−
tf t0
δ
zT
d dt
∂Ψ ∂ z
dt
把式(3—15)~式(3—19)代入式(3—11)整理可得
(3—17) (3—18) (3—19)
δ J '=δ Jt f +δ Jx +δ Jw +δ Jz
x = f [x(t) , u(t) , t]
x(t) ∈ Rn
(3—44)
始端条件为
x(t0 ) = x0
终端约束为
(3—45)
N [x(t f ) , t f ] = 0 N ∈ Rm m ≤ n
控制约束为
,t f 待定
(3—46)
g[x(t) , u(t) , t] ≥ 0 u(t) ∈ Rr g ∈ Rl l ≤ r ≤ n
python牛顿法求函数最小值

python牛顿法求函数最小值牛顿法是一种求解方程根或最小值的方法,也被称为牛顿-拉弗森方法。
它使用函数的一阶和二阶导数来逼近函数的局部极小值点或者多项式的解。
在本文中,我们将探讨如何用Python实现牛顿法来求解函数的最小值。
先推荐一本学习Python的书籍:《Python编程快速上手-让繁琐工作自动化》牛顿法原理对于求解单个变量函数最小值的情况,牛顿法的原理可以简述如下:假设f(x)是要求解的函数,x0是初始值,假设我们已知f(x)的一阶和二阶导数,那么可以通过以下公式来随着迭代次数n的增加不断逼近x的最小值点:x(n+1) = x(n) - (f'(x(n)) / f''(x(n)))换句话说,我们可以得到一个关于x的方程,如下所示:f'(x) = 0通过不断迭代求解,x的值会趋近于f(x)的最小值点。
请注意,此方法的收敛性和初始值有很大关系,因此需要谨慎选择初始值,以免导致更新计算结果发散。
使用牛顿法求解函数最小值下面我们使用Python编写一个牛顿法收敛于目标函数最小值的例子。
此处我们将使用SciPy库中的optimize.newton函数,该函数使用Newton-Raphson方法求解单变量非线性方程的根(或最小值)。
首先,让我们定义函数f(x)。
在这个例子中我们将使用以下函数:f(x) = x^3 - 2x^2 + 2我们可以在Python中实现如下:def f(x):return x**3 - 2*x**2 + 2接下来,我们需要找到f(x)的一阶和二阶导数,这可以通过SymPy库来实现。
SymPy不仅可以求函数的导数,还可以将导数计算式子从字符串表示转换为Python表达式。
import sympy#定义符号xx = sympy.symbols('x')#定义函数f(x)fx = x**3 - 2*x**2 + 2#求f(x)的一阶和二阶导数f_prime = sympy.diff(fx, x, 1)f_second = sympy.diff(fx, x, 2)#打印函数对应的一阶和二阶导数print(f'f(x)的一阶导数为:{f_prime}')print(f'f(x)的二阶导数为:{f_second}')上面的输出应该显示:f(x)的一阶导数为:3*x**2 - 4*xf(x)的二阶导数为:6*x - 4现在我们已经有所有必要的信息,可以使用SciPy.optimize库的optimize.newton函数求解函数最小值了。
混动车辆能量管理模块化ECMS框架

现代电子技术Modern Electronics Technique2023年9月1日第46卷第17期Sep. 2023Vol. 46 No. 170 引 言为了减少二氧化碳排放以缓解全球变暖,各国相继出台严格的污染物排放法规,由此产生汽车制造商之间的强大竞争,促使汽车工业寻求创新的解决方案,以降低汽车的油耗。
最有希望的解决方案之一是混合动力传动系统,它由一个或多个主动力源(例如内燃机)和一个或多个辅助动力源(如电机)组合而成。
混合动力传动系统的优点是能够利用额外的控制自由度优化动力总成部件的工作点,利用辅助动力源回收制动能量,以及减小主动力源的负担。
主动力源和辅助动力源的众多组合产生了多种动力总成拓扑。
这些拓扑中的每一种都需要一种能量管理策略(EMS ),以最佳地利用额外的控制自由度,特别是等效消耗最小策略(ECMS )在降低燃油性能和计算工作量之间取得了很好的折衷,因此经常被使用。
ECMS 中的目标函数是通过燃料消耗量和电池的等效燃料消耗量的总和最小化来定义的。
尽管ECMS混动车辆能量管理模块化ECMS 框架王 魏1, 王 健1, 刘少飞2, 田 毅1, 张晓媛1, 段天宇1, 任子涵1(1.河北金融学院 大数据科学学院, 河北 保定 071051;2.北汽福田汽车股份有限公司工程研究总院, 北京 102206)摘 要: 文中提出一种用于混合动力车辆能量管理实时控制的模块化等效消耗最小化策略(ECMS )框架,可实现能量管理实时控制的分布式开发。
该框架采用Pontryagin 极小值原理求解ECMS 最优控制问题。
首先,将最优控制问题分解为与各个子系统相关的优化问题;其次,通过Hamiltonian 函数将与每个子系统有关的优化问题协调到全局最优;最后,在某款DHT 混合动力车辆验证模块化ECMS ,此车辆模型支持4种操作模式:2种电动模式、并联模式和串联模式。
测试结果表明,模块化ECMS 只需修改能量管理系统中功率平衡方程的连接矩阵,即可解决上述每种操作模式的最优控制问题。
第5章 最小值原理
第5章 最小值原理
最小值原理(又称最大值原理)是庞特里亚金在20 世纪50年代末提出来的。有的文献中又称其为最大值原 理,这是由在求解控制问题中哈密顿函数是求最大值还 是最小值而异。 最小值原理给出了求解控制变量受不等式约束的最 优控制问题的一个必要条件,用它替换了古典变分法中 的控制方程 H 0,是古典变分法求泛函极值的扩充, u 又称为现代变分法,它能够处理更为广泛的最优控制问 题。
1
第5章 最小值原理
5.1 最小值原理 5.2 快速最优控制
2
第5章 最小值原理
5.1
一、最小值原理
最小值原理
给定系统运动方程
x = f ( x, u, t )
(1)
式中:x R n
— 状态变量
u Rm
— 控制变量
t [t0 , t f ] — 时间变量
给定系统初始时刻和初始状态 x(t0 ) x0 (2)
b (t ) 在某一段
i 1 ij j
n
(或几段)时间区间 t1 , t2 0, t f 上取零值,则此种最
优控制问题为奇异情况。此时,无法应用最小值原
理确定奇异区间内u*(t)与x*(t),λ*(t)的关系。关于奇
异情况的快速最优控制问题参阅5.3节。
18
第5章 最小值原理
制称为最短时间控制或快速最优控制。由于求
非线性系统和任意终端状态的快速最优控制的 解析解十分困难,因此这里仅考虑线性定常系 统且终端状态固定为状态空间原点的快速最优 控制问题。
14
第5章 最小值原理 设已知线性定常系统的状态方程为 (1) x = Ax + Bu 式中:x(t)是n维状态变量,u(t)是m维控制向量。 初始状态和终端状态为
最优控制问题求解方法综述

最优控制问题求解方法综述作者:王忠晶来源:《中国科技博览》2014年第36期[摘要]最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科,解决最优控制问题的主要方法有古典变分法、极小值原理和动态规划。
最优控制理论已被应用于综合和设计最速控制系统、最省燃料控制系统、最小能耗控制系统、线性调节器等。
同时,这篇综述也阐释了几种常见方法之间的关系。
中图分类号:C935 文献标识码:A 文章编号:1009-914X(2014)36-0043-011、最优控制问题基本介绍最优控制是使控制系统的性能指标实现最优化的基本条件和综合方法,是现代控制理论的核心之一,是从大量实际问题中提炼出来的。
它所研究的问题可以概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标最优。
最优控制是最优化方法的一个应用。
从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。
从经济意义上说,是在一定的人力、物力和财力资源条件下,是经济效果达到最大(如产值、利润),或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。
控制理论发展到今天,经历了古典控制理论和现代控制理论两个重要发展阶段,现已进入了以大系统理论和智能控制理论为核心的第三个阶段。
对于确定性系统的最优控制理论,实际是从20世纪50年代才开始真正发展起来的,它以1956年原苏联数学家庞特里亚金(Pontryagin)提出的极大值原理和1957年贝尔曼提出的动态规划法为标志。
时至今日,随着数字技术和电子计算机的快速发展,最优控制的应用已不仅仅局限于高端的航空航天领域,而更加渗入到生产过程、军事行动、经济活动以及人类的其他有目的的活动中,对于国民经济和国防事业起着非常重要的作用。
对于静态优化的方法,解决的主要是如何求解函数的极值问题;变分法则被用来求解泛函的极值问题;极小值原理的方法,适用于类似最短时间控制、最少燃料控制的问题。
第3章 极大值原理
∂F d ∂F − =0 & ∂x dt ∂x d ∂F =0 & dt ∂w d ∂F =0 & dt ∂Z
横截条件:
(3-2-17)
(3-2-18)
(3-2-19)
∂Φ ∂ψ T ∂F &T + ν +F−x { } =0 & tf ∂t f ∂t f ∂x ∂Φ ∂ψ T ∂F { } =0 + ν+ & tf ∂x ∂x ∂x
(3-2-29) (3-2-30)
由 3.1 节中泛函达到极值的充分条件,维尔斯特拉斯 E 函数在泛函极小值时 沿最优轨线非负,即有
& ) − F ( x * , w* , Z * , x &*) &, w &, Z &* , w & *, Z E = F ( x * , w* , Z * , x ∂F ∂F & −Z & * ) T ∂F ≥ 0 &−x &* )T & −w & * )T − (x − (w − (Z & & & ∂x ∂w ∂Z
(3-2-2)
转移满足边界条件
ψ [ x (t f ), t f ] = 0
(3-2-3)
的终态,其中 tf 未知,并使性能指标(泛函)
32
J (u ) = Φ[ x(t f ), t f ] + ∫ L[ x(t ), u (t ), t )]dt
t0
tf
(3-2-5)
达到最小值,实现最优控制的条件是: (1) 设 u*(t)是最优控制,x*(t)为由此最优控制产生的最优轨线,则存在与 其相对应的协态向量 λ*(t),使 x*(t)和 λ*(t)满足规范方程组
现代控制理论极小值原理

x*
0
x0,*
N
x* N ,N x N
同理,对不同的边界情况,只需选取相应的边界条件及横截条件,条件1、2不变。 当控制变量不受限制时,则条件2与控制方程
等效。
H
x* k ,u* k ,** k uk
1,k
0
第24页/共62页
第三节 极小值原理解最短时间控制问题
一般情况下,非线性受控系统的最短时间控制问题的解析解是很困难的,本节 只讨论线性定常受控系统的最短时间控制问题导弹舵面的打开时间。
比较上述极小值原理与变分法所得的结果,可以发现两者的差别仅在⑵。 极小值原理的严格证明很复杂,下面的证明将重于物理概念的阐述,尽量避免烦琐 的数学推导。 设系统动态方程为:
xt f xt,ut,t
(8-7)
边控界制条变x件量为t f :受有x界t闭0,集为约简x束0单,起即见,假设u终t端时刻 及终端状态 utU
t0
我们应用极小值原理来求解。这时哈密尔顿函数为
H x,u,t 1 T tAxt T tBut
故得正则方程为
x* t Ax* t Bu* t * t AT* t
第27页/共62页
根据极小值原理可得
1 *T t Ax* t *T tBu* t 1 *T t Ax* t *T tBut
即
本章介绍的极小值原理是控制变量 受限制的u情t况下求解最优控制问题的有力工
具。它是由苏联学者庞特里亚金于1956年提出的。极小值原理从变分法引伸而来, 它的结论与古典变分法的结论极为相似,但由于它能应用于控制变量 受边界限 制的情况,并不要求哈密尔顿函数H对u连续可微,因此其适用范围扩大了。
ut
L.S.Pontryagin
巴申定律公式求最小值
巴申定律公式求最小值
摘要:
1.巴申定律简介
2.巴申定律公式
3.求最小值的方法
4.实际应用案例
正文:
1.巴申定律简介
巴申定律,又称巴甫洛夫定律或巴氏定律,是俄国生理学家伊万·谢尔盖耶维奇·巴甫洛夫于19 世纪末20 世纪初提出的关于神经反射的一般规律。
该定律主要描述了在一定条件下,一个刺激与一个特定的反应之间的联系随着重复次数的增加而逐渐增强,最终形成条件反射。
2.巴申定律公式
巴申定律可以用数学公式表示为:R = R0 + K × (S - S0)
其中:
R:反应强度
R0:无条件反射强度
K:灵敏度
S:刺激强度
S0:无条件刺激强度
3.求最小值的方法
在实际问题中,我们常常需要求解巴申定律公式中的最小值。
求解最小值的方法可以通过微分法,对公式两边关于S 求导,然后令导数等于0 求解S 的值。
4.实际应用案例
巴申定律在实际生活中有很多应用,例如:在教育领域,教师可以利用巴申定律制定合理的教学计划,使学生通过重复学习逐步形成对知识的熟练掌握;在企业管理中,管理者可以运用巴申定律激励员工,通过设定合适的奖励机制,使员工在完成任务时逐渐形成条件反射,提高工作效率。
牛顿最小数原理

牛顿最小数原理
1.选择一个初始猜测值x0作为函数的根的近似值。
2.根据函数的导数计算函数在当前猜测值x0处的斜率。
3.使用斜率值来计算当前猜测值x0处的切线与x轴的交点,得到下一个猜测值x1。
4.将x1作为新的猜测值,在步骤2和步骤3中重复计算,得到下一个猜测值x2。
5.不断重复步骤2和步骤3,直到达到指定精度或满足停止准则为止。
停止准则可以是达到预设的迭代次数,或者两次迭代的差值小于某个预设的容差。
初始猜测值的选择对计算结果的影响较大,不同的初始值可能导致收敛到不同的根或者不收敛。
如果函数的导数在根附近为零或接近零,牛顿法可能会出现发散现象。
对于多重根,迭代过程可能会出现不稳定,需要特殊处理。
最小值原理

0 ≤ t < 0.307 0.307 ≤ t ≤ 1 0 ≤ t < 0.307 0.307 ≤ t ≤ 1
c1e t + 1 x(t ) = t c2 e + 0.5
根据边界条件继续求出:
4e + 1 x = t 4.37e + 0.5
t *
0 ≤ t < 0.307 0.307 ≤ t ≤ 1
第2章 最小值原理
2.1 连续系统的最小值原理
考虑条件极值定理中,控制函数u受约束的情况 。为了便于分析,控制 方程(2-1),可写成另一种形式(2-2):
H = 0 (2 1) u * H [ x (t ), λ (t ), u * (t ), t ]最优控制中的变分法 (t ), u (t ), t ] (2 2) = min H [ x* (t ), λ 第1章
H = L + λf (3) u = x + λ ( x + u ) 2 1 = (1 λ ) x + (λ )u 2
λ (t f ) =
1 u * (t ) = sgn(λ (t ) ) (4) 2 由协态方程求解 λ (t ) H λ= = λ 1 (5) x T
φ ξ + v λ (1) = 0 x(t f ) x(t f ) (6)
第2章 最小值原理
(2)最小值原理只给出最优控制的必要条件,并非充分条件。符 合最小值原理的控制能否使性能指标取最小值,还需进一步判断: 数学证明 根据问题的物理性质来判断 (3)若讨论的是性能指标极大的问题,只要将指标函数前加负号 ,即可应用最小值原理来求解。 (4)为了适合于计算机运算的需要,最小值原理还有离散的表达 形式。
利贝格最小值定律

利贝格最小值定律
利贝格最小值定律(Le Chatelier's principle)是化学中的一个重要定律,它描述了当对一个处于平衡状态的系统施加压力或改变条件时,系统会通过调整反应方向来抵消这种变化。
根据利贝格最小值定律,当一个系统处于平衡时,如果受到外界干扰(如温度、压力、浓度等的变化),系统将通过偏移反应的方向来减少这种干扰,以达到新的平衡状态。
具体来说,当增加某种反应物的浓度或压力时(或减少某种产品的浓度或压力),系统将偏移反应方向以消耗这种“过量”物质,从而减少其浓度或压力。
相反,如果减少某种反应物的浓度或压力(或增加某种产品的浓度或压力),系统将偏移反应方向以补充这种“不足”物质,从而增加其浓度或压力。
利贝格最小值定律适用于不可逆反应和可逆反应,使得系统能够保持稳定的平衡状态。
这个定律对于工业上的化学过程和实验室中的反应条件的控制都具有重要的应用价值。
巴申定律公式求最小值
巴申定律公式求最小值
(原创版)
目录
1.巴申定律简介
2.巴申定律公式
3.求最小值的方法
4.实际应用案例
正文
1.巴申定律简介
巴申定律,又称巴申 - 霍斯定律,是由俄国物理学家巴申和英国物理学家霍斯于 1939 年提出的,它主要描述了在弹性限度内,应变与应力之间的关系。
这一定律在固体力学、材料科学等领域有着广泛的应用。
2.巴申定律公式
巴申定律的数学表达式为:
应变ε = (1/E) * 应力σ
其中,ε表示应变,σ表示应力,E 表示材料的弹性模量。
3.求最小值的方法
在实际应用中,我们需要求解的是应力和应变中的最小值。
为了求解最小值,我们可以将巴申定律公式进行变形:
σ = E * ε
ε = (σ / E)
通过这种方法,我们可以得到应力和应变中的最小值。
需要注意的是,在弹性限度内,应力和应变是成正比的,因此,当应力达到最大值时,应
变也会达到最大值。
4.实际应用案例
巴申定律在实际应用中具有重要意义。
例如,在建筑结构设计中,我们需要考虑材料的弹性模量,以便计算出材料的应力和应变。
此外,在材料科学研究中,通过研究材料的应力和应变关系,我们可以了解材料的弹性性能,从而为材料设计和改进提供理论依据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
pontryagin最小值原理
Pontryagin最小值原理是由苏联数学家L.S.Pontryagin于1956年提出的,是探讨最优控制问题的基本理论之一。
这个原理可以帮助人们解决一类非线性控制问题,它是在处理一般情况下的非线性最优控制问题时得出的。
这个理论的主要思想是通过寻找一条最优解曲线,使得在该曲线下行动的代价最小化。
下面我们来详细介绍Pontryagin最小值原理。
Pontryagin最小值原理是非线性最优控制领域中的重要理论,它是解决非线性最优控制问题的基本思想。
该原理的核心思想是最小化系统代价函数,获得最优解曲线。
系统的代价函数是指如果出现一定的行动,带来的代价或收益。
例如,在经济领域,代价函数可以是生产货物的成本;在机械控制技术,代价函数可以是能耗;在航天和飞行控制方面,代价函数可以是安全性和可靠性。
- “状态”是指操作过程中受控系统目前的状态,通常用
$x(t)=\begin{bmatrix}x_1(t)\\x_2(t)\\.\\.\\x_n(t)\end{bmatrix}$ 表示;
- “控制”是指要做的决策或行动,通常用
$ u(t)=\begin{bmatrix}u_1(t)\\u_2(t)\\.\\.\\u_m(t)\end{bmatrix}$ 表示;
- “状态方程”用于描述系统的演化过程,它可以用一个常微分方程来表示。
常微分方程的形式如下:$$\dot{x}=f(x,u,t)$$ 其中$x$表示系统的状态,$u$表示控制,
$\dot{x}$ 表示$x$对时间$t$的导数,$f(x,u,t)$表示系统状态的演化。
- 状态方程可以使用初始条件和末端条件来确定最优解。
使用这些术语,我们现在可以将Pontryagin最小值原理表述如下:
假设我们有一个动态系统,它的状态是$x(t)$,控制是$u(t)$。
设
$c(x(t),u(t),t)$是状态和控制在$t$时刻产生的代价函数,$f(x(t),u(t),t)$是状态的
演化方程,则满足以下两个条件的控制$u^*(t)$在$t\in[0,T]$区间内为系统的最优控
制:
1. 给定了末端条件 $x(T)$,并且满足常微分方程 $\dot{x}=f(x,u,t)$;
2. 在所给定的时间区间 $[0,T]$ 内所有可能的状态和控制组合 ($x(t)$ 和 $u(t)$)中,使得代价最小化的状态之和为$J=\int_0^T c(x(t),u(t),t)dt $。
注意,在Pontryagin最小值原理中,动态系统通过一个代价函数最小化控制系统。
代价函数是在一段时间内测量系统效果的计算方法。
因此,我们可以看出,这个原理实际上是在求解控制系统的最优性问题。
使用Pontryagin最小值原理可以有效地解决许多非线性最优控制问题。
它给出了一个清晰的框架来表示控制系统的最优性问题。
原理的核心思想是最小化代价函数以达到最优性。
为此,我们需要找到代价最小的状态序列(或状态轨迹)。
解决这些问题的方法是在给定系统的末端条件和动态方程的条件下,使用计算工具和函数最小化代价函数。
总之,Pontryagin最小值原理极大地简化了非线性最优控制问题的求解过程。
它为控制系统的最优性问题提供了清晰的数学基础,使得我们可以确定最优的行动方案。
正因如此,Pontryagin最小值原理已经广泛适用于许多应用领域,包括航天、制造业、金融、环保等。