LPC1114系统板入门手册
LPC1114自学教程_完整(下)
第二部分新建工程与下载程序LPC1114的开发环境有很多种如keil4、IAR、NXP公司的LPCXpresso,也包括周立功公司的TKStudio。
本教程就以最常用的Keil4.11开发环境的使用、新建工程、仿真设置及程序下载作介绍。
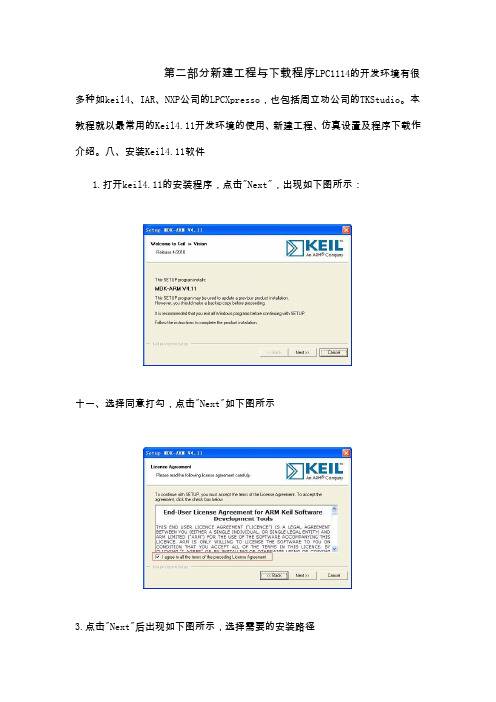
八、安装Keil4.11软件1.打开keil4.11的安装程序,点击"Next",出现如下图所示:十一、选择同意打勾,点击"Next"如下图所示3.点击"Next"后出现如下图所示,选择需要的安装路径4.点击"Next"直到安装结束5.使用MDK411注册机破解Keil4,破解方法请参考网络二、设置keil与仿真器的连接在安装完keil4后,下面就介绍怎样新建工程,方法其实大家都很熟悉的,和51单片机一样。
四、打开keil4,选择"project->CreateNewproject",并输入文件名,选择保存路径。
五、我们这里使用的是LPC1114芯片,在这里选择NXP的芯片"LPC1114x301",选择正确的芯片后,点击确定。
如下图所示:2 3.在确认后出现如下提示框,是否加载LPC11xx的启动文件,在这里我们点击“是”。
1 4.在Target1->SourceGroup中添加main.c文件,右击Source,点击"AddFilestoGroup",也可以添加Group进行代码分组管理,使代码结构更有条理。
2 5.对keil文件输出及仿真设置,点击来对keil进行设置,通过设置,keil在编译后可以输出hex文件,用于下载到MCU。
在LPC1343芯片中,可以需要通过设置输出bin文件用于USBISP下载,在此不作介绍。
6.Jlink 在keil4中的设置,首先需要在电脑上安装Jlink的驱动软件V4.14版本,安装方法,在这里省略。
LPC1114自学教程_完整(上)
PC1114 实验教程来自NXP的ARMCortex-M0内核MCU;贞明电子实验板和ZLG教程全程助学;主频50MHz的32位微处理器让你更好的完成应用;32KFlash8KRAM以及全方位的片上外设让你的系统更简洁;良好的下载和调试方式和堪比8位MCU的价格让你使用更方便;电子让生活更美好!天下的人&&贞明电子2011年1月16日写在前面自从LPC1768教程推出以来,受到不少网友的鼓励和支持。
因此,本人再次决定参照我设计的ARMCortex-M0实验板写一个教程,实验板采用底板+小板的方式,使得系统支持LPC1100系列,新塘M051系列和LPC1300系列的MCU。
由于支持型号众多,在此统一以LPC1114为基础撰写,有不同的地方随时指出来,以便区分。
虽然本教程是配套实验板写的,但是在本教程以及其他地方都会公布原理图,这样不但让大家知其然还要知其所以然。
因此不拥有开发板自己搭建系统同样能够好好的学习!这样方便了一些囊中羞涩的学生朋友。
如果你有足够的精力和时间完全可以自制一套LPC1114系统板,我在这里先鼓励辛苦的你了!下面介绍一下我们的主角吧,请我们的LPC1114隆重登场,LPC1114拥有领先的ARMCortex-M0内核,以及NXP公司先进的制造工艺和强悍的外设,当然也少不了一条超低的价格哟(小声的说----目前的价格貌似在12RMB哟)!LPC1100系列Cortex-M0微控制器是为嵌入式系统应用而设计的高性能、低功耗的32位微处理器。
它是市场上定价最低的32位微控制器解决方案。
主频高达50MHz,支持睡眠、深度睡眠和深度掉电3种低功耗模式。
同样还拥有丰富的外设,高达32KB片内flash,8KB片内ram,一路IIC、一路RS485、8通道10位ADC、两路SSP、4个通用定时器、多达42个IO口。
好了、LPC1114就介绍这么多,下面介绍一下开发板支持的LPC1343,其实LPC1343和LPC1114的封装和管脚以及片内的外设都兼容,所以说如果会了LPC1114几乎也就会了LPC1343,LPC1343是ARMCortex-M3内核,主频72MHz,除了拥有LPC1114有的所有片内外设以外,LPC1343还拥有USB接口,而且这个USB接口内置固化驱动,号称是业界最简单的MCU内置USB。
LPC1114的IO配置部分的中文手册

表111. LPC111x 引脚配置引脚配置--图8–10引脚描述表8–114引脚配置--图8–10引脚描述表8–114引脚配置图8–8-图8–10引脚描述表8–112表8–114图8–10表8–112表8–113表8–1143. LPC111x 引脚描述表 112. LPC1113/14 引脚描述表 (LQFP48 封装)RESET — 外部复位输入:此引脚上的低电平会使设备复位,I/O 端口和外设复位成初始的默认状态,并使处理器从0地址开始执行。
I/O PIO0_0 — 通用数字输入/输出引脚。
PIO0_1/CLKOUT/ CT32B0_MAT2PIO0_2/SSEL0/ CT16B0_CAP04[1]I/O PIO0_1 —通用数字输入/输出引脚。
复位时低电平启动在线系统编程命令处 理程序。
O CLKOUT — 时钟输出脚。
OCT32B0_MAT2 —32位定时器0匹配输出2。
10[1]I/O PIO0_2 —通用数字输入/输出引脚。
O SSEL0 —SPI0从机选择。
ICT16B0_CAP0 —16位定时器0捕获输入0。
PIO0_314[1] I/OPIO0_3 —通用数字输入/输出引脚。
.I/O SCK0 —SPI0串行时钟。
PIO0_7/CTS 23[1] I/O PIO0_7 —通用数字输入/输出引脚(大电流输出驱动器)。
I CTS —UART清除发送。
PIO0_8/MISO0/CT16B0_MAT0PIO0_9/MOSI0/CT16B0_MAT1 SWCLK/PIO0_10/ SCK0/CT16B0_MAT2TDI/PIO0_11/AD0/CT32B0_MAT3 TMS/PIO1_0/AD1/CT32B1_CAP0 TDO/PIO1_1/AD2/CT32B1_MAT0TRST/PIO1_2/AD3/CT32B1_MAT1 27[1] I/O PIO0_8 —通用数字输入/输出引脚。
LPC1114自学教程_完整(上)
PC1114 实验教程来自NXP的ARMCortex-M0内核MCU;贞明电子实验板和ZLG教程全程助学;主频50MHz的32位微处理器让你更好的完成应用;32KFlash8KRAM以及全方位的片上外设让你的系统更简洁;良好的下载和调试方式和堪比8位MCU的价格让你使用更方便;电子让生活更美好!天下的人&&贞明电子2011年1月16日写在前面自从LPC1768教程推出以来,受到不少网友的鼓励和支持。
因此,本人再次决定参照我设计的ARMCortex-M0实验板写一个教程,实验板采用底板+小板的方式,使得系统支持LPC1100系列,新塘M051系列和LPC1300系列的MCU。
由于支持型号众多,在此统一以LPC1114为基础撰写,有不同的地方随时指出来,以便区分。
虽然本教程是配套实验板写的,但是在本教程以及其他地方都会公布原理图,这样不但让大家知其然还要知其所以然。
因此不拥有开发板自己搭建系统同样能够好好的学习!这样方便了一些囊中羞涩的学生朋友。
如果你有足够的精力和时间完全可以自制一套LPC1114系统板,我在这里先鼓励辛苦的你了!下面介绍一下我们的主角吧,请我们的LPC1114隆重登场,LPC1114拥有领先的ARMCortex-M0内核,以及NXP公司先进的制造工艺和强悍的外设,当然也少不了一条超低的价格哟(小声的说----目前的价格貌似在12RMB哟)!LPC1100系列Cortex-M0微控制器是为嵌入式系统应用而设计的高性能、低功耗的32位微处理器。
它是市场上定价最低的32位微控制器解决方案。
主频高达50MHz,支持睡眠、深度睡眠和深度掉电3种低功耗模式。
同样还拥有丰富的外设,高达32KB片内flash,8KB片内ram,一路IIC、一路RS485、8通道10位ADC、两路SSP、4个通用定时器、多达42个IO口。
好了、LPC1114就介绍这么多,下面介绍一下开发板支持的LPC1343,其实LPC1343和LPC1114的封装和管脚以及片内的外设都兼容,所以说如果会了LPC1114几乎也就会了LPC1343,LPC1343是ARMCortex-M3内核,主频72MHz,除了拥有LPC1114有的所有片内外设以外,LPC1343还拥有USB接口,而且这个USB接口内置固化驱动,号称是业界最简单的MCU内置USB。
LPC1114系统板入门手册
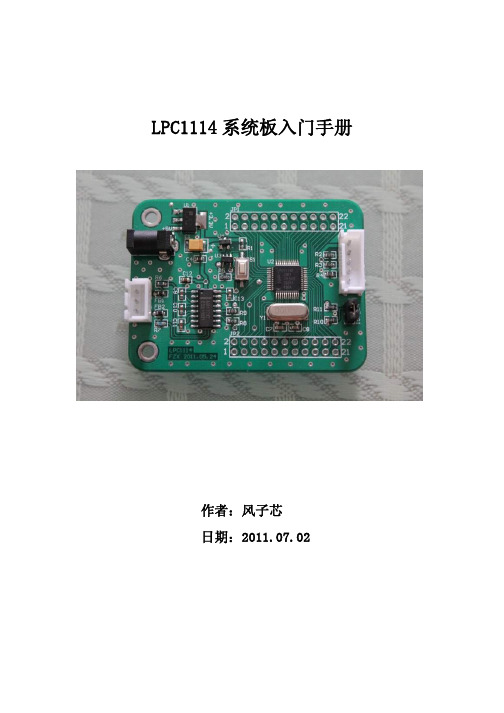
LPC1114系统板入门手册作者:风子芯日期:2011.07.02一、LPC1114系统板简介1、2.5mm电源插座电源极性:内芯为正极,外圆为地线输入电压:DC,范围4.5V~7V注意事项:一定不要超过7V,否则会损坏板子2、串口引脚定义:RXD、GND、TXD(从上往下)电平标准:RS-232电平,可以直连PC机串口的2、5、3引脚3、复位按钮按下按钮2秒以上,LPC1114复位;释放按钮,LPC1114运行程序4、ISP模式选择跳线插上跳线帽,将两个引脚短路,LPC1114进入ISP模式;拔掉跳线帽,然后按下复位按钮2秒后释放,LPC1114进入正常模式5、SWD调试接口引脚定义:+3.3V、nRST、SWDIO、SWCLK、GND(从上往下)二、使用FlashMagic下载LPC1114固件即使没有硬件仿真器,LPC1114也可以使用一款免费软件FlashMagic通过简易串口下载程序。
您可以在/网站上下载到FlashMagic的最新版本。
1、制作串口下载线如上图所示,将PC机串口的2、5、3分别与LPC1114系统板串口的1、2、3连接起来。
如果您的电脑没有串口,买一个现成的USB转串口的转接头,即可。
LPC1114系统板已经提供了MAX3232电平转换芯片,将RS-232电平转换为3.3V电平。
2、安装FlashMagic双击图标,按照提示,选择默认方式,即可。
风子芯电脑上安装的FlashMagic版本是V5.84.2259。
3、进入ISP模式A、连接好串口线和电源线,使LPC1114系统板上电;B、插上ISP跳线帽C、按下复位按钮2秒以上,释放按钮,即可4、配置FlashMagicA、双击桌面上的快捷方式,打开FlashMagic软件(如下图所示)B、如上图所示,选择下载程序使用的串口及其波特率,建议选择57600bps。
波特率越高,下载程序速度越快。
C、单击“Select Device”按钮,在弹出的对话框中选择LPC1114/301D、单击“Browse”按钮,选择需要下载的HEX固件程序(如下图所示)D、单击“Start”按钮,开始给LPC1114系统板下载固件程序FlashMagic界面的下方会提示下载程序的进度,下载完成后,会提示“Finished”。
第三章资料
注意事项
• (1)LPC1100系列处理器支持两种调试方式,但是采用JTAG暂用 了大量的PCB面积,而采用SWD则少得多。而且在调试速度等方 便SWD并不比JTAG差,所以建议读者在实际应用中尽量采用SWD 方式进行设计。 • (2)SWD调试方式不是采用标准端口,读者可以根据自己的需 要排列管脚顺序。
模拟电源原理图
使用 7805 设计的模拟电源
电路非常简单,一端接输入,一端接地,最后一端接输入
开关电源设计
使用LM2576 设计的开关电源
电感的选择:(电压单位:V 电流单位:A)
电源设计注意事项 • 在设计电源电路时,千万不要省略电容,特别是电解电容,如果在各方 面都允许的情况下尽量采用容量大的电解电容。
电源电路的实现:
• 设计末级电源电路 由于LPC1114系统功耗并不大,而系统对电源的要求又比较高, 所以不太适合用开关电源。可以采用低压差模拟电源LDO,而合 乎技术参数的LDO芯片很多,Sipex半导体的SPX1117是一个不错 的选择,其内部功能模块图 3-2 所示,当然在实际应用时也可以选 择兼容的IC来替代它(如LM1117等)。
使用LPC1100为核心器件的最小系统:
时钟系统
电源系统
LPC1100
复位模块
调试接口
LPC1100的最小系统框图
最小系统成员——电源电路的设计
说明:
• 电源电路往往在开发中不被工程师重视,大多数工程师都把大量 的时间和精力花到怎样去实现一个产品的功能,怎样提高产品的 新特点上去了。只有在产品运行不稳定的时候,他们才愿意去花 费一定时间去查找电源的问题。
• 其实电源的重要性并不亚于产品的功能,一个产品如果电源不稳 定的话会影响整个系统的稳定性。所以,初学者在开始就应该对 电源部分足够的重视。这里说的重视电源部分,不仅是指在原理 上设计出一个完美的电源电路,而且在画PCB图纸时,也要把它 放在首位。
LPC1114 IO口配置
7.3.2 管脚模式...........................................................................................................2
7.3.3 滞后作用...........................................................................................................3
备注:表 7.1 中按照存储单元列出了IOCON寄存器,这和它们在LQFP48 封装中的物理管脚编号一一 对应,从左上角的管脚 1(PIO2_6)开始。按照端口编号排列的IOCON寄存器见 表 7.2。
表 7.1 寄存器汇总:I/O 配置(基址 0x4004 4000)
名称
访问
IOCON_PIO2_6
楼D室
中电脑数码市场)
电话:(0755)83781788(5 线)
电话:(027)87168497 87168297 87168397
传真:(0755)83793285
传真:(027)87163755
上海周立功
地址:上海市北京东路 668 号科技京城东座 7E 室 电话:(021)53083452 53083453 53083496 传真:(021)53083491
7.4.2 IOCON位置寄存器 ........................................................................................26
LPC1100 系列微控制器用户手册
©2008 Guangzhou ZLGMCU Development CO., LTD. ii
LPC1114

00 P = 1
01 P = 2
10 P = 4
11
P=8
-
保留. 不要将1写到这些保留位中。
0x00 0x0
4.4 系统 PLL状态寄存器
User manual
Rev. 00.10 — 11 January 2010
© NXP B.V. 2010. All rights reserved.
10 of 326
此LPC111X 数据手册之中文翻译,由武汉理工大学UP团队友情提供,仅供学习交流之用,欢迎指正,共同修改完善。
NXP Semiconductors
0
复位SPI0外设。
1
SPI0 复位失效。
1
I2C_RST_N
I2C复位控制
0x1
0
复位I2C 外设。
1
I2C 复位失效。
UM10398_0
User manual
Rev. 00.10 — 11 January 2010
© NXP B.V. 2010. All rights reserved.
13 of 326
-
0x0DC
保留
R/W
0x0E0
CLKOUT时钟源选择
R/W
0x0E4
CLKOUT时钟源更新允许
R/W
0x0E8
CLKOUT时钟分频器
-
0x0EC - 0x0FC 保留
R
0x100
POR捕获PIO状态0
R
0x104
POR捕获PIO状态1
0x000 0x000 0x000 0x000 0x001 0x85F 0x000 0x000 0x000 0x000 0x000 0x000 0x000 0x000 0x000 依赖用户
MEMORY存储芯片LPC1114FBD48_302中文规格书
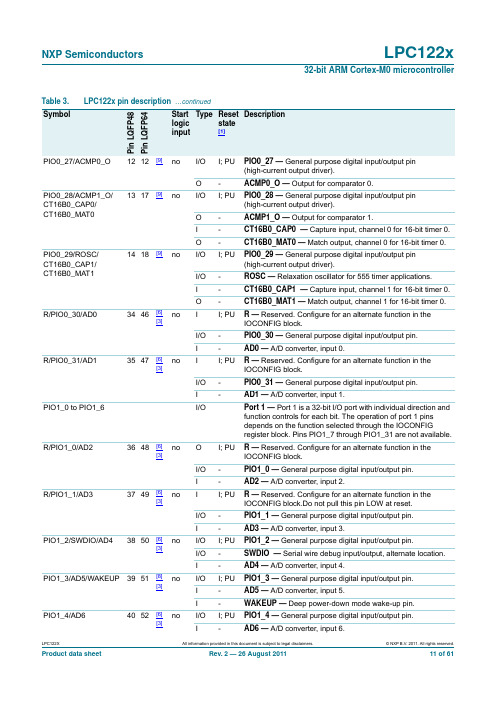
LPC122X All information provided in this document is subject to legal disclaimers.© NXP B.V. 2011. All rights reserved.Product data sheet Rev. 2 — 26 August 2011 11 of 61NXP Semiconductors LPC122x 32-bit ARM Cortex-M0 microcontroller PIO0_27/ACMP0_O 1212[9]no I/O I; PU PIO0_27 — General purpose digital input/output pin (high-current output driver).O -ACMP0_O — Output for comparator 0.PIO0_28/ACMP1_O/CT16B0_CAP0/CT16B0_MAT01317[9]no I/O I; PU PIO0_28 — General purpose digital input/output pin (high-current output driver).O -ACMP1_O — Output for comparator 1.I -CT16B0_CAP0 — Capture input, channel 0 for 16-bit timer 0.O -CT16B0_MAT0 — Match output, channel 0 for 16-bit timer 0.PIO0_29/ROSC/CT16B0_CAP1/CT16B0_MAT11418[9]no I/O I; PUPIO0_29 — General purpose digital input/output pin (high-current output driver).I/O -ROSC — Relaxation oscillator for 555 timer applications.I -CT16B0_CAP1 — Capture input, channel 1 for 16-bit timer 0.O -CT16B0_MAT1 — Match output, channel 1 for 16-bit timer 0.R/PIO0_30/AD03446[6][3]no I I; PUR — Reserved. Configure for an alternate function in the IOCONFIG block.I/O -PIO0_30 — General purpose digital input/output pin.I -AD0 — A/D converter, input 0.R/PIO0_31/AD13547[6][3]no I I; PUR — Reserved. Configure for an alternate function in the IOCONFIG block.I/O -PIO0_31 — General purpose digital input/output pin.I -AD1 — A/D converter, input 1.PIO1_0 to PIO1_6I/OPort 1 — Port 1 is a 32-bit I/O port with individual direction andfunction controls for each bit. The operation of port 1 pinsdepends on the function selected through the IOCONFIGregister block. Pins PIO1_7 through PIO1_31 are not available.R/PIO1_0/AD23648[6][3]no OI; PU R — Reserved. Configure for an alternate function in the IOCONFIG block.I/O-PIO1_0 — General purpose digital input/output pin.I -AD2 — A/D converter, input 2.R/PIO1_1/AD33749[6][3]no I I; PUR — Reserved. Configure for an alternate function in the IOCONFIG block.Do not pull this pin LOW at reset.I/O -PIO1_1 — General purpose digital input/output pin.I -AD3 — A/D converter, input 3.PIO1_2/SWDIO/AD43850[6][3]no I/O I; PUPIO1_2 — General purpose digital input/output pin.I/O -SWDIO — Serial wire debug input/output, alternate location.I -AD4 — A/D converter, input 4.PIO1_3/AD5/WAKEUP 3951[8][3]no I/O I; PUPIO1_3 — General purpose digital input/output pin.I -AD5 — A/D converter, input 5.I -WAKEUP — Deep power-down mode wake-up pin.PIO1_4/AD64052[6][3]no I/O I; PUPIO1_4 — General purpose digital input/output pin.I -AD6 — A/D converter, input 6.Table 3.LPC122x pin description …continuedSymbol P i n L Q F P 48P i n L Q F P 64Start logic inputType Reset state [1]DescriptionLPC122X All information provided in this document is subject to legal disclaimers.© NXP B.V. 2011. All rights reserved.Product data sheet Rev. 2 — 26 August 2011 12 of 61NXP Semiconductors LPC122x 32-bit ARM Cortex-M0 microcontroller PIO1_5/AD7/CT16B1_CAP0/CT16B1_MAT04153[6][3]no I/O I; PU PIO1_5 — General purpose digital input/output pin.I -AD7 — A/D converter, input 7.I -CT16B1_CAP0 — Capture input, channel 0 for 16-bit timer 1.O -CT16B1_MAT0 — Match output, channel 0 for 16-bit timer 1.PIO1_6/CT16B1_CAP1/CT16B1_MAT14254[2][3]no I/O I; PUPIO1_6 — General purpose digital input/output pin.I -CT16B1_CAP1 — Capture input, channel 1 for 16-bit timer 1.O -CT16B1_MAT1 — Match output, channel 1 for 16-bit timer 1.PIO2_0 to PIO2_15I/OPort 2 — Port 2 is a 32-bit I/O port with individual direction andfunction controls for each bit. The operation of port 2 pinsdepends on the function selected through the IOCONFIGregister block. Pins PIO2_16 through PIO2_31 are notavailable.PIO2_0/CT16B0_CAP0/CT16B0_MAT0/RTS0-29[2][3]no I/O I; PU PIO2_0 — General purpose digital input/output pin.I -CT16B0_CAP0 — Capture input, channel 0 for 16-bit timer 0.O -CT16B0_MAT0 — Match output, channel 0 for 16-bit timer 0.O -RTS0 — Request To Send output for UART0.PIO2_1/CT16B0_CAP1/CT16B0_MAT1/RXD0-30[2][3]no I/O I; PU PIO2_1 — General purpose digital input/output pin.I -CT16B0_CAP1 — Capture input, channel 1 for 16-bit timer 0.O -CT16B0_MAT1 — Match output, channel 1 for 16-bit timer 0.I -RXD0 — Receiver input for UART0.PIO2_2/CT16B1_CAP0/CT16B1_MAT0/TXD0-31[2][3]no I/O I; PUPIO2_2 — General purpose digital input/output pin.I -CT16B1_CAP0 — Capture input, channel 0 for 16-bit timer 1.O -CT16B1_MAT0 — Match output, channel 0 for 16-bit timer 1.O -TXD0 — Transmitter output for UART0.PIO2_3/CT16B1_CAP1/CT16B1_MAT1/DTR0-32[2][3]no I/O I; PUPIO2_3 — General purpose digital input/output pin.I -CT16B1_CAP1 — Capture input, channel 1 for 16-bit timer 1.O -CT16B1_MAT1 — Match output, channel 1 for 16-bit timer 1.O -DTR0 — Data Terminal Ready output for UART0.PIO2_4/CT32B0_CAP0/CT32B0_MAT0/CTS0-33[2][3]no I/O I; PUPIO2_4 — General purpose digital input/output pin.I -CT32B0_CAP0 — Capture input, channel 0 for 32-bit timer 0.O -CT32B0_MAT0 — Match output, channel 0 for 32-bit timer 0.I -CTS0 — Clear To Send input for UART0.PIO2_5/CT32B0_CAP1/CT32B0_MAT1/RI0-34[2][3]no I/O I; PUPIO2_5 — General purpose digital input/output pin.I -CT32B0_CAP1 — Capture input, channel 1 for 32-bit timer 0.O -CT32B0_MAT1 — Match output, channel 1 for 32-bit timer 0.I-RI0 — Ring Indicator input for UART0.Table 3.LPC122x pin description …continuedSymbol P i n L Q F P 48P i n L Q F P 64Start logic inputType Reset state [1]Description。
lpc1114课程设计

lpc1114课程设计一、教学目标本课程的教学目标是使学生掌握LPC1114微控制器的原理和应用,培养学生具备基本的嵌入式系统设计和开发能力。
具体包括以下三个方面:1.知识目标:学生需要了解LPC1114微控制器的内部结构、工作原理和外设接口,掌握C语言编程和嵌入式系统开发的基本方法。
2.技能目标:学生能够使用LPC1114微控制器进行简单的嵌入式系统设计和开发,包括硬件连接、程序编写、系统调试等。
3.情感态度价值观目标:培养学生对嵌入式系统技术的兴趣和热情,提高学生解决实际问题的能力,培养学生的创新精神和团队合作意识。
二、教学内容本课程的教学内容主要包括以下几个部分:1.LPC1114微控制器的基本原理和内部结构,包括CPU、内存、外设接口等。
2.C语言编程基础,包括数据类型、运算符、控制语句、函数等。
3.嵌入式系统开发的基本方法,包括硬件连接、程序下载、系统调试等。
4.LPC1114微控制器的外设接口编程,包括GPIO、UART、SPI、ADC等。
5.实际项目案例分析,让学生通过实际项目锻炼嵌入式系统设计和开发的能力。
三、教学方法为了达到本课程的教学目标,我们将采用以下几种教学方法:1.讲授法:通过讲解LPC1114微控制器的基本原理和内部结构,让学生掌握相关知识。
2.讨论法:学生进行小组讨论,分享学习心得和实际项目经验,提高学生的动手能力和团队合作意识。
3.案例分析法:通过分析实际项目案例,让学生了解嵌入式系统设计和开发的全过程。
4.实验法:安排学生进行实验操作,让学生亲手实践,提高学生的动手能力和解决问题的能力。
四、教学资源为了保证本课程的顺利进行,我们将准备以下教学资源:1.教材:选用合适的LPC1114微控制器教程,为学生提供理论学习的参考。
2.参考书:提供相关的嵌入式系统技术书籍,丰富学生的知识体系。
3.多媒体资料:制作课件、视频等多媒体资料,生动形象地展示教学内容。
4.实验设备:准备LPC1114微控制器开发板和相关实验器材,让学生进行实际操作。
GSM Pneumatic Gripper-Swivel System 1114 1115 用户手册

GSMPneumatic ·Gripper-Swivel SystemTypeGripper typeSize Gripping force safety deviceEnd position dampingModular DesignVersions of the series 32405064303845{}ASISwithoutO.D. clampingI.D. clampingESElastomer dampingHydraulic shock absorbers16202532401620253240{}ASwithoutO.D. clampingGSMText 6· Text 7·Text 9Pneumatic ·Gripper-Swivel SystemHow to order Swivel angleEnd position dampingGripping force safety deviceSizeGripper typeType0°180°°l ee n dSwivel ra n geAdjust m e n t ra n ge of start a n gle Adjust m e n t ra n ge of e n d a n gle Switchi n g ra n ge of se n sor0°°Swivel ra n geAdjust m e n t ra n ge of start a n gle Adjust m e n t ra n ge of e n d a n gle Switchi n g ra n ge of se n sor• in the case of 90°units• in the case of 180°unitsEnd stop adjustability and switching angle of sensorApplication exampleWarranty24 months (details, general terms and conditions and operation manuals can be downloaded under )Scope of deliveryCentering sleeves, O-rings for direct connection, screws for lateral fastening, steel balls for adjustment of the swiveling angle, assembly and operation manual with declaration of incorporationGripping force maintenance devicewith either mechanical gripping force maintenance or SDV-P pressure maintenance valveSectional diagramFor the exact size of the required accessories, availability of this size and the designation and ID, please refer to the additional views at the end of the size in question. You will find more detailed information on our accessory range in the “Accessories” catalog section.is the arithmetic total of the gripping force applied to each finger at distance P (seeThe finger length is measured from the upper edge of the gripper housing in theThe recommended workpiece weight is calculated for a force-type connection with a coefficient of friction of 0.1 and a safety factor of 2 against slippage of the workpiece on acceleration due to gravity g. Considerably heavier workpiece weights are permitted Repeat accuracyis defined as the spread of the limit position after 100 consecutive strokes. Closing and opening times, cycle timesClosing and opening times are purely the times that the base jaws or fingers are in motion. Cycle times are purely the times that the rotating part (mostly the pinion) is in motion. Valve switching times, hose filling times or PLC reaction times are not included in the above times and must be taken into consideration when determining cycle times. Middle attached loadThe middle attached load should constitute a typical load. It is defined as the half of the max. possible mass moment of inertia that can be swiveled without restriction,The drawing shows the gripper in the basic version with opened jaws without considering the dimensions of the described options below.A, a Main/direct connection, rotary actuatorclockwise turningB, b Main/direct connection, rotary actuatoranti-clockwise turningC, c Main/direct connection, gripper openingD, d Main/direct connection, gripper closing1Rotary actuator connection2Finger connectionFK Interfering contour during swivelingHT Depth of the centering sleeve hole in thematching parti The SDV-P pressure maintenance valve can also be used for I.D. or O.D. grippingalternatively or in addition to the spring-loaded, mechanical gripping forceAdapterGripper swivel moduleThe direct connection is used for supplying compressed air without hoses. Instead, the pressure medium is fed through bore-holes in the mounting plate.The mechanical gripping force maintenance device ensures a minimum gripping force even in case of pressure drop. This acts as closing force in the AS version, and as opening force in the IS version. In addition, the gripping force maintenance device can also be used for increasing the gripping force or for single-acting gripping.The drawing shows changes in dimensions of the shock absorber versions, compared to the elastomer versions shown on the main view.CAUTION: Monitoring is carried out by magnetic switches, and in case of side-by-side assembly of several units, a minimum distance of X mm between the units must be maintained.Description ID Material Scope of delivery Finger blanks ABR 450340539Aluminum3Finger blanks for customized subsequent machining Description ID Recommended product Stop for MMS-PPosition monitoring with two programmable positions per sensor. The end positionmonitoring is mounted in the C-slot.For AS / IS versionThe mounting kits for the 90° and 180° GSM versions are identical, only the mounting is different. The mounting kit consists of two switch cams, two operating cams and small components. The proximity switches must be ordered separately.For AS / IS versionThe mounting kits for the 90° and 180° GSM versions are identical, only the mounting is different. The mounting kit consists of two switch cams, two operating cams (only one needs to be fitted, see operating manual), four sensor brackets and small components. The proximity switches must be ordered separately.Description ID Recommended product Mounting kit for proximity switchAS-GSM-Z 450304946End position monitoring mounted with mounting kit。
LPC111x中文版用户手册

20101102
LPC111x/LPC11C1x 用户手册
• 增加了 LPC111x/102/202/302 (LPC1100L 系列 ) ( 表 1,表 280)。 • 更新了 PLL 输出频率 (< 100 MHz),见 3.10 节 “ 系统 PLL 功能描述 ”。 • 更新了对深度睡眠模式和深度掉电模式的描述,见 3.8 节 “ 电源管理 ”。 • 增加了第五章 “LPC111x/LPC11Cxx 功耗配置 ” 。 • WDT 更改为 24 位定时器,见 17 章 “LPC111x/LPC11Cxx 看门狗定时器 (WDT)”。 • 21.6.2 章节的 “ 调试连接 ”。 • SYSTCKCAL 寄存器的地址改为 0x4004 8154 ( 表 6 和表 33)。 • 添加了比较 flash 映像的注解 ( 20.10 章节的 “flash 映像的注解 ”)。 • 在 20.5 部分 -“UART ISP 命令 ” 中,ISP 的波特率被严格限制 (230400 bps 除外)。 • Flash 写操作的干扰影响 (20.5.7 节的 “ 复制 RAM 到 flash<Flash address> <RAM address> <no of
版权所有 2012恩智浦有限公司 未经许可,禁止转载
NXP Semiconductors
UM10398
LPC111x/LPC11Cxx User manual
修改记录 版本 5 更新:
4 更新: 3 更新:
2 更新:
1
日期
描述
20110621
LPC111x/LPC11C1x/LPC11C2x 用户手册
片上 C_CAN 驱动器和闪存的系统编程工具通过 C_CAN 连接在 LPC11Cxx 里,此外 LPC11C2x 还包含一个一个片上 CAN 收发器。
LPC1114的IO配置部分的中文手册
表111. LPC111x 引脚配置引脚配置--图8–10引脚描述表8–114引脚配置--图8–10引脚描述表8–114引脚配置图8–8-图8–10引脚描述表8–112表8–114图8–10表8–112表8–113表8–1143. LPC111x 引脚描述表 112. LPC1113/14 引脚描述表 (LQFP48 封装)RESET — 外部复位输入:此引脚上的低电平会使设备复位,I/O 端口和外设复位成初始的默认状态,并使处理器从0地址开始执行。
I/O PIO0_0 — 通用数字输入/输出引脚。
PIO0_1/CLKOUT/ CT32B0_MAT2PIO0_2/SSEL0/ CT16B0_CAP04[1]I/O PIO0_1 —通用数字输入/输出引脚。
复位时低电平启动在线系统编程命令处 理程序。
O CLKOUT — 时钟输出脚。
OCT32B0_MAT2 —32位定时器0匹配输出2。
10[1]I/O PIO0_2 —通用数字输入/输出引脚。
O SSEL0 —SPI0从机选择。
ICT16B0_CAP0 —16位定时器0捕获输入0。
PIO0_314[1] I/OPIO0_3 —通用数字输入/输出引脚。
.I/O SCK0 —SPI0串行时钟。
PIO0_7/CTS 23[1] I/O PIO0_7 —通用数字输入/输出引脚(大电流输出驱动器)。
I CTS —UART清除发送。
PIO0_8/MISO0/CT16B0_MAT0PIO0_9/MOSI0/CT16B0_MAT1 SWCLK/PIO0_10/ SCK0/CT16B0_MAT2TDI/PIO0_11/AD0/CT32B0_MAT3 TMS/PIO1_0/AD1/CT32B1_CAP0 TDO/PIO1_1/AD2/CT32B1_MAT0TRST/PIO1_2/AD3/CT32B1_MAT1 27[1] I/O PIO0_8 —通用数字输入/输出引脚。
第9章 LPC1114通用异步串行通信
进行串行通信的两台设备必须同步工作才能有效地检测通信线路上的信号变化,从而采 样传送数据脉冲。设备同步对通信双发有两个共同的要求:一是通信双方必须采用统一的编 码方式;二是通信双方必须能产生相同的传送速率。
9.1.3 串行通信的数据帧
要保证串行通信正常进行,串行通信的双方必须采用统一的编码方式,即确定一个字符 的表达形式以及位发送顺序和位串长度等,这就是串行通信中数据帧的概念。
N/A
N/A
接收器输入电压范围/V
±15
-10~10
-7~12
接收器输入门限
±3V
±200mV
±200mV
接收器输入电阻
3~7
4
≥12
驱动器共模电压/V
-
-3~3
-1~3
接收器共模电压/V
-
-7~7
-7~12
9.2.2 RS-232C 物理接口及电平标准
1. 电平转换
RS-232C 规定的逻辑电平与一般微处理器的逻辑电平不同,RS-232 采用负逻辑方式: ² 标准逻辑“1”对应:-5V~-15V 电平; ² 标准逻辑“0”对应:+5V~+15V 电平; ² 未定义区:-3V~+3V。 现在的 PC 机上的串口都是采用 RS-232 协议,而 8051 单片机的逻辑“1”通常是以 5V
RS-232、RS-422 与 RS-485 标准只对接口的电气特性作出规定,而不涉及接插件、电缆
或协议。RS-232、RS-422 与 RS-485 的电气规定如表 9-1 所示。
表 9-1 串行总线电气规定
规定
RS-232
RS-422
RS-485
工作方式
单端
FS_11C14开发板用户手册 V4.0
I
FS_11C14 开发板用户手册
第一章 开发板概述
1.1 简介
华清远见专为物联网教学研发的 FS_11C14 开发板,基于 LPC11C14 微控制器 (ARM Cortex-M0 内核),集成多种传感器、RFID、ZigBee、OLED 显示屏等模块。 丰富的硬件资源及物联网相关系列实验程序, 适合应用于物联网教学平台及工程 师研发参考平台。 此FS_11C14开发板配套有开放的CoLink仿真器,使用者可不需要另外配置 U-LINK2等仿真器就可进行开发,从而为使用者提供了一个简洁方便、可以快速 上手的良好开发环境,为应用开发节省了时间,提高了效率。
FS_11C14 开发板用户手册
FS_11C14 开发板用户手册 V4.0 物 联 网 开 发 平 台
北京华清远见研发中心
2012 年 6 月
FS_11C14 开发板用户手册
目 录
第一章 开发板概述...................................................................................................... 1 1.1 简介................................................................................................................. 1 1.2 主要配置......................................................................................................... 2 第二章 硬件资源.......................................................................................................... 3 2.1 硬件资源概览................................................................................................. 3 2.2 处理器............................................................................................................. 3 2.3 板载主要传感器............................................................................................. 4 2.4 RFID 设备模块................................................................................................ 4 2.5 ZigBee 无线通信模块.................................................................................... 5 2.6 仿真器.............................................................................................................. 5 第三章 板载实验代码.................................................................................................. 6 3.1 配套案例、实验说明...................................................................................... 6 3.2 配套案例.......................................................................................................... 6 3.3 配套实验.......................................................................................................... 6 第四章 RealView MDK 开发环境使用......................................................................... 8 4.1 RealView MDK 开发环境简介....................................................................... 8 4.2 创建工程......................................................................................................... 8 4.2.1 创建工程文件...................................................................................... 8 4.2.2 选择设备.............................................................................................. 9 4.3 编译和连接................................................................................................... 10 4.3.1 设置目标硬件的工具选项................................................................ 10 4.3.2 编译链接工程.................................................................................... 11 第五章 CoLink 仿真器安装及调试........................................................................... 12 5.1 CoLink 环境安装安装.................................................................................. 12 第一步 CoLink 固件升级............................................................................. 12 第二步 CoLink USB 驱动程序安装............................................................. 12 第三步 CoLink 与 RealView MDK 连接的插件安装................................... 13 备注................................................................................................................ 13 5.2 Colink 程序调试.......................................................................................... 13 5.2.1 仿真器的配置.................................................................................... 14 5.2.2 程序下载的配置................................................................................ 14 5.2.3 程序调试运行.................................................................................... 16
LCISP教程

教程:使用FlashMagic下载LCP1114LPC1114不像LPC1343一样,它没有USB Bootloader(引导区)(这并不奇怪,因为他没有USB)。
虽然你可以使用专用的硬件设备对其进行下载,如针对ARM的Segger J-Link或者很多支持ARM的Crossworks的硬件仿真器(如果你使用Corssworks),如果你没有硬件仿真器仍然可以使用由NXP支持的一款免费软件FlashMagic来对设备下载程序。
如果你已经使用SWD方式写入固件,FlashMagic也可以用来升级你的设备。
(例如,在启动后直接进入深度睡眠模式)几乎所有NXP的LPC系列内建ISP Bootloader来允许用户使用FlashMagic来升级Flash,只需对你的MCU和UART进行简单的连接。
在使用LPC1114评估板的情况下,你只需要设置ISP跳线,复位芯片,然后自动进入ISP模式。
这个唯一的硬件要求是一个廉价的3.3V逻辑电平的UART,例如使用USB2COM接口板作为一个例子,到LPC1114到接口板的连接如下:连接USB2COM到LPC1114评估板USB2COM接口板LPC1114GND GNDRXD TXDTXD RXD设置UART的注意事项:如果你不知道USB转UART的串口波特率和COM端口号,你可以进入Windows设备管理器,查看设备的属性窗口,在Port(COM&LPT)选项里,在“端口设置”标签可以找到和修改相关的信息。
,我们建议,波特率至少设置57600,因为他默认的设置是一个相对缓慢的9600波特率。
步骤一:进入ISP模式1.连接UART转接板到LPC1114,如上面表格列出2.设置ISP跳线3.按复位按键并释放来复位开发板步骤二:配置Flashmagic1.开始FlashMagic2.点击“Select Device…”按钮,并从弹出的窗口选择相应设备,在这里我们使用LPC1114开发板,我们选择LPC1114/3013.设置波特率,COM口和晶振频率(在这里选择12.0M)4.选择”Erase blocks used by Hex file”复选框5.当你创建工程用”Browse”按钮来选择fimemare.hex文件创建的地址,这是一个编译后要写入设备Flash的代码。
32位单片机LPC11C14学习
32位单片机LPC11C14学习功能:(设置GPIO口方向),参数(端口号,位,输入或输出(0入1出))GPIOSetDir( PORT0, 1, 0 );GPIOSetValue()一个是设置端口方向,一个是设置输出的值,直接调用就可以了。
如果在片内RAM当中运行代码并且应用程序需要调用中断,那么必须将中断向量重新映射到Flash地址0x0。
这样做是因为所有的异常向量都位于地址0x0及以上。
通过将寄存器MEMMAP(位于系统控制模块当中)配置为用户RAM模式来实现这一点。
#ifdef __DEBUG_RAMLPC_SYSCON->;SYSMEMREMAP = 0x1;#else#ifdef __DEBUG_FLASHLPC_SYSCON->;SYSMEMREMAP = 0x2;#endif#endifARM 微控制器有一个显著的特点,就是都可以把时钟频率倍频到很高,具体到多高,每个系列的微控制器都有一个指标,我们现在要学的Cortex-M0内核处理器LPC1114最高能到50MHz,当然,其它的ARM内核微处理器可以倍频到更高,现在好多手机都采用了ARM内核处理器,比如卖的很火的诺基亚 5233就是采用了ARM11处理器,ARM11的处理器的主频为433MHz,比Cortex-M0的50MHz高多了吧!所以Cortex-M0处理器被ARM称为入门级的内核!要实现对系统时钟的配置,时钟配置图是必须要看懂的!因为它比文字更具有参考价值,看上这张图配置时钟,绝对不会出现漏洞!(我建议你把这张图打印出来贴到你的墙上,我就是这么做的,你看着办吧!)接下来,我将一步一步引领你彻底看懂这张“时钟配置图”。
注意了,要开始讲图了!(这张图就是数据手册说的时钟产生单元:CGU(Clock generationunit))LPC1114 内部含有3个时钟振荡器:系统振荡器,IRC振荡器,看门狗振荡器。
嵌入式微控制器 LPC1114FHN33 LPC1114 资料

NXP 50-MHz, 32-bitCortex-M0™ microcontrollers LPC1100Built around the new Cortex-M0 architecture, the smallest, lowest power, and most energy-efficient ARM core ever developed, these MCUs are ideally equipped for use in many traditional 8/16-bit applications.} Analog peripheral - 10-bit Analog-to-Digital Converter with eight channels and conversion rates up to 400 K samples per second } Other :- U p to 42 general-purpose I/O (GPIO) pins with configurable pull-up/down resistors and a new, configurable open-drain operating mode - F our general-purpose counter/timers, with a total of four capture inputs and 13 match outputs- Programmable Watchdog Timer (WDT) with lock-out feature - System tick timer- Each peripheral has its own clock divider for power savings Applications } White goods } e-Metering} Consumer peripherals } Remote sensors} 8/16-bit applications } Industrial networking } System supervisorsKey features} ARM Cortex-M0 processor - 50 MHz operation - N ested Vectored Interrupt Controller for fast deterministic interrupts - W akeup Interrupt Controller allows automatic wake from a priority interrupt - T hree reduced-power modes: Sleep, Deep-sleep, and Deep power-down } Memories- Up to 128 KB Flash memory - Up to 16 KB SRAM } Serial peripherals - U ART with fractional baud rate generation, internal FIFO, and RS-485 support - U p to 2 SPI controllers with FIFO and multi-protocol capabilities - I 2C-bus interface supporting full I 2C-bus specification and Fast mode plus with a data rate of 1 Mbit/s with multiple address recognition and monitor modeDate of release: January 2010Document order number : 9397 750 16865Printed in the Netherlands© 2010 NXP B.V.All rights reserved. Reproduction in whole or in part is prohibited without the prior written consent of the copyright owner. The information presented in this document does not form part of any quotation or contract, is believed to be accurate and reliable and may be changed without notice. No liability will be accepted by the publisher for any consequence of its use. Publication thereof does not convey nor imply any license under patent- or other industrial or intellectual property rights.LPC1100 block diagramNXP’s LPC1100 is the lowest-priced 32-bit MCU solution in the market. It offers greater value than existing 8/16-bit microcontroller by delivering unprecedented performance, simplicity, low power, and dramatic reductions in code size for every application.With over 45 DMIPS of performance compared to thesub-DMIP performance typical of 8-bit MCUs and 3 to 5 DMIPS for 16-bit MCUs, the LPC1100 not only execute basic control tasks but sophisticated algorithms as well, making even the most complex tasks within reach. Using less time to do more tasks translates directly into lower energy consumption.This level of performance is delivered at 50 MHz, with extensive power optimization, at less than 10 mA.Challenging the belief that 8/16-bit microcontrollers use less code, industry-standard Coremark benchmarks show that the LPC1100 requires 40-50% less code for most common microcontroller tasks. Development toolsThe LPC1100 family is supported by the LPCXpresso , an easy to use, comprehensive development tool platform for under US$30, as well as development tools from IAR, Keil, Hitex, Code Red, and many others. For the most current listing, please visit /microcontrollers.Additional features} Serial Wire Debug (4 breakpoints)} High-current output driver (20 mA) on one pin } High-current sink drivers (20 mA) on two pins} Integrated PMU (Power Management Unit) to minimize power consumption during Sleep, Deep-sleep, and Deep power-down modes} Single 3.3 V power supply (1.8 to 3.6 V)} Over 5 kV ESD for rugged applications} 13 GPIO pins can be used as edge and level sensitive interrupt sources} Clock generation unit with divider that can reflect the main oscillator clock, IRC clock, CPU clock, and Watchdog clock.} Processor wake-up from Deep-sleep mode via interrupts from various peripherals} Brownout detect with four separate thresholds for interrupt and forced reset} Power-On Reset (POR)} Crystal oscillator with an operating range of 1 MHz to 25 MHz } 12 MHz internal RC oscillator trimmed to 1% accuracy that can also be used as a system clock} PLL allows CPU operation up to the maximum CPU rate without the need for a high-frequency crystal. Can be run run from the main oscillator, the internal RC oscillator, or the Watchdog oscillator.} Available in 48-pin LQFP , 33-pin HVQFN, or 44-pin PLCC packageLPC111x ordering options。
ARMCortex-M0LPC1114开发板入门手册_图文.
Ration ARM Cortex-M0 LPC1114开发板 V3.0使用指南亲!感谢您使用 ARM Cortex-M0 LPC1114开发板!谷歌公司在 2013年一举收购 8家机器人公司,2014年初又用 32亿美元现金收购一家创办 2年 , 且只有 2款产品的智能家居公司,这家公司名字叫做 nest。
这意味着智能家居、物联网、可穿戴电子设备已经进入实质性阶段了。
首先,我要告诉您,您的选择是明智的,Cortex 内核开发板是这些电子产品的主流控制器,因为 Cortex 内核单片机是 ARM 公司的目前主打的产品,你以前所听到的ARM9\ARM11都已经是浮云了。
Cortex 内核单片机从低端到高端, 遍布于各个领域,它是最大特点就是功耗低、性价比高。
未来的电子产品,一定是智能的。
(你知道“点名时间”网吗?不知道的话赶快去看看吧:/赶快去看看别人怎么赚钱未来的电子产品,一定是低功耗的。
(地球资源保护商人做产品,一定是选择成本最低且可以满足需求的材料。
(性价比您现在拿到手的开发板,内核是 Cortex-M0,属于 Cortex 系列低端的单片机。
(千万不要把“低端”与你的“收入”画等号。
低端与高端,指的是它的性能,性能决定了它的应用领域,如果你在你的领域做精做强,那么想象一下结果……一、开发板检测:1. 把附带的 USB 数据线拿出来,一端插到电脑,一端插到开发板。
2. 按下电源(POWER开关, 开发板上会运行 GUI 演示例程, 这个例程是《应用篇例程》例程 5.3。
开发板在发货以前,我会用例程程序检测所有的硬件运行良好,所以,你拿到手的开发板,一般是不会有问题的。
有任何疑问,请随时联系我:QQ:253057617电话:152********(山西省太原市QQ 群:160610211博客:http://www.rationmcu .com二、学习前的准备工作1. 需要安装 USB 转串口驱动(用于 ISP 下载程序打开这个文件夹双击这个安装程序, 根据提示安装完, 一般都是点击下一步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LPC1114系统板入门手册
作者:风子芯
日期:2011.07.02
一、LPC1114系统板简介
1、2.5mm电源插座
电源极性:内芯为正极,外圆为地线
输入电压:DC,范围4.5V~7V
注意事项:一定不要超过7V,否则会损坏板子
2、串口
引脚定义:RXD、GND、TXD(从上往下)
电平标准:RS-232电平,可以直连PC机串口的2、5、3引脚
3、复位按钮
按下按钮2秒以上,LPC1114复位;释放按钮,LPC1114运行程序
4、ISP模式选择跳线
插上跳线帽,将两个引脚短路,LPC1114进入ISP模式;拔掉跳线帽,然后按下复位按钮2秒后释放,LPC1114进入正常模式
5、SWD调试接口
引脚定义:+3.3V、nRST、SWDIO、SWCLK、GND(从上往下)
二、使用FlashMagic下载LPC1114固件
即使没有硬件仿真器,LPC1114也可以使用一款免费软件FlashMagic通过简易串口下载程序。
您可以在/网站上下载到FlashMagic的最新版本。
1、制作串口下载线
如上图所示,将PC机串口的2、5、3分别与LPC1114系统板串口的1、2、3连接起来。
如果您的电脑没有串口,买一个现成的USB转串口的转接头,即可。
LPC1114系统板已经提供了MAX3232电平转换芯片,将RS-232电平转换为3.3V电平。
2、安装FlashMagic
双击图标,按照提示,选择默认方式,即可。
风子芯电脑上安装的FlashMagic版本是V5.84.2259。
3、进入ISP模式
A、连接好串口线和电源线,使LPC1114系统板上电;
B、插上ISP跳线帽
C、按下复位按钮2秒以上,释放按钮,即可
4、配置FlashMagic
A、双击桌面上的快捷方式,打开FlashMagic软件(如下图所示)
B、如上图所示,选择下载程序使用的串口及其波特率,建议选择57600bps。
波特率越高,下载程序速度越快。
C、单击“Select Device”按钮,在弹出的对话框中选择LPC1114/301
D、单击“Browse”按钮,选择需要下载的HEX固件程序(如下图所示)
D、单击“Start”按钮,开始给LPC1114系统板下载固件程序
FlashMagic界面的下方会提示下载程序的进度,下载完成后,会提示“Finished”。
固件程序下载完成后,拔掉ISP跳线帽,按下复位按钮使LPC1114系统板复位后,就会立刻运行行固件程序。
三、使用MDK+JLink调试LPC1114程序(待补充)
1、安装JLink驱动程序
运行安装程序JLinkARM_V422b,选择默认安装即可
下载地址:/cms/jlink.html
2、安装RealView MDK-ARM(Keil)
推荐的版本是V4.14.4.0。
也尝试过低版本的MDK,对Cortex M0和JLink支持的不是很好。
3、如何配置MDK工程,通过JLink下载LPC1114固件程序
A、打开LPC1114的UART样例工程
B、在菜单“Flash”中选择“Configure Flash Tools”,如下图配置所示
C、单击“Settings”按钮,选择“Debug”页。
按照如下配置,检测JLink仿真器和LPC1114的IDCODE是否已正确识别出来。
D、选择“Flash Download”页,如下图所示
E、单击“Add”按钮,按照下图所示选择LPC1114 32K一项
F、单击“Flash”菜单里面的“Download”即可将编译生成的axf文件烧写到LPC1114的FLASH ROM中
4、如何配置MDK工程,通过JLink调试LPC1114程序
A、打开LPC1114的UART样例工程,单击工程配置按钮(下图红圈位置)
B、选择“Debug”页,如下图所示
C、单击“Settings”按钮,选择“Debug”页。
按照如下配置,检测JLink仿真器和
LPC1114的IDCODE是否已正确识别出来。
D、单击菜单“Debug”里面的“Start/Stop Debug Session”,开始调试程序
E、MDK先将axf文件下载到LPC1114的FLASH ROM当中。
在“Build Output”窗口中会打印出如下的信息
JLink info:
------------
DLL: V4.20p, compiled Nov 19 2010 15:55:07
Firmware: J-Link ARM V8 compiled Nov 19 2010 11:55:23
Hardware: V8.00
S/N : 20090626
Feature(s) : RDI,FlashDL,FlashBP,JFlash,GDBFull
* JLink Info: Found SWD-DP with ID 0x0BB11477
* JLink Info: FPUnit: 4 code (BP) slots and 0 literal slots
ROMTableAddr = 0xE00FF003
Target info:
------------
Device: LPC1114x301
VTarget = 3.293V
State of Pins:
TCK: 0, TDI: 0, TDO: 0, TMS: 0, TRES: 1, TRST: 1
Hardware-Breakpoints: 4
Software-Breakpoints: 2048
Watchpoints: 2
JTAG speed: 2000 kHz
Erase Done.
Programming Done.
Verify OK.
F、如果前面的操作没有问题,“Debug”菜单中的,单步、全速、断点等调试按钮就已经可以使用了。
G、当程序执行时,光标会跟着移动。
如下图所示。