手把手教你DIY单舵机蠕动机器人,附详细教程
手工机器人的制作方法

手工机器人的制作方法今天来聊聊怎么制作手工机器人。
这手工机器人做起来可有意思啦,既能锻炼动手能力,又能发挥咱的创造力。
需要一些硬纸板、剪刀、胶水、彩笔、小电机、电池、电线啥的。
硬纸板可以从快递盒子或者旧包装盒上找,剪刀要那种锋利点的,不然剪起来可费劲了。
胶水嘛,最好是那种粘性强的,能把纸板粘得牢牢的。
小电机可以在网上或者电子市场买到,电池就用普通的五号或者七号电池就行。
材料准备好了,咱就开始动手吧。
第一步,先设计一下你的机器人。
你可以在纸上画个草图,想想你的机器人长啥样,有啥功能。
是高大威猛的,还是小巧可爱的?是会走路的,还是会唱歌的?这全凭你自己的想象。
第二步,根据你的设计,用剪刀把硬纸板剪成各种形状。
比如,身体、脑袋、胳膊、腿啥的。
剪的时候要小心点,别把自己的手给剪了。
如果你的设计比较复杂,可以多剪几个不同形状的纸板,然后再组合起来。
第三步,把剪好的纸板用胶水粘起来。
这一步很关键哦,要粘得牢固一点,不然等会儿机器人散架了可就不好玩了。
可以先从身体部分开始粘,然后再粘脑袋、胳膊和腿。
粘的时候要注意角度和位置,让机器人看起来比较协调。
第四步,给机器人装饰一下。
用彩笔给机器人画上眼睛、嘴巴、衣服啥的,让它看起来更漂亮。
你还可以用一些小贴纸、小珠子啥的来装饰,让机器人更加独特。
第五步,安装电机和电池。
如果你的机器人要会动,那就需要安装一个小电机。
把电机用胶水或者螺丝固定在机器人的身体里,然后用电线把电机和电池连接起来。
注意正负极不要接反了哦,不然电机可不会转。
第六步,测试一下你的机器人。
把电池装上,看看电机能不能正常工作,机器人能不能动起来。
如果有问题,就检查一下线路和电机,看看是不是哪里没接好或者坏了。
如果你的机器人还想有其他功能,比如会唱歌、会发光啥的,你可以再加上一些小喇叭、小灯珠啥的。
不过这就需要你有更多的电子知识和动手能力了。
制作手工机器人是一件很有趣的事情。
你可以根据自己的喜好和创意,做出各种各样的机器人。
机器人制作教程

机器人制作教程
制作机器人的材料清单:
1. Arduino主板
2. 电池盒
3. 直流电机
4. 齿轮组装件
5. 轮子
6. 距离传感器
7. 蜂鸣器
8. 导线
9. 电源线
10. 面包板
11. 陶瓷电容
12. 按钮开关
步骤:
1. 将Arduino主板安装在面包板上,连接好电源线和按钮开关。
2. 在面包板上插入陶瓷电容,并与Arduino主板相连。
3. 将直流电机与齿轮组装件连接好,并确认电机能够正常工作。
4. 将轮子安装在直流电机上。
5. 将距离传感器与Arduino主板相连,在代码中设置距离传感
器的工作模式。
6. 将蜂鸣器与Arduino主板相连,并在代码中设置蜂鸣器的工
作频率。
7. 使用导线将直流电机与Arduino主板上的电机驱动接口相连。
8. 编写控制机器人运动的代码,并上传至Arduino主板。
9. 安装电池盒并连接好电源线,确保机器人有足够的电力供应。
10. 打开按钮开关,启动机器人。
注意事项:
1. 在组装过程中,确保电路连接正确,避免短路等问题。
2. 使用适当的安全措施,如非手指触摸电路、避免过度电压等。
3. 如果机器人出现故障或异常,及时断电检查并修复问题。
4. 在编写代码时,遵循良好的编程实践,并确保代码逻辑正确。
以上是制作机器人的简要教程,希望对您有所帮助。
教你DIY一个简易机器人

手把手教你DIY一个简易的"平衡机器人"你家有玩具车就能成.跟随这些步骤.你就能指导你的掌上明珠们.自己动手做.即培养了他.她们对科学技术的兴趣.也加强了他们的动手能力!花费不多.把玩腻了的玩具汽车拿来改造就很好!这个机器人是“利用简单的开关作为传感器的双轮倒钟摆机构。
”原理是“当机器人倒向一边的时候,利用电机扭力将其向平衡。
DIY简易平衡机器人(制作步骤)步骤1 所需材料.你需要以下的设备来完成简易平衡机器人:1、小的电机;(可以把你的四驱车拆了)2、一些齿轮;(我想你的四驱车还是不能幸免)3、一根轴;(你就放弃吧,肯定是拆了你的四驱车了)4、两个轮子;(……)5、一些塑料片,用来做机器人的轴承套和脖子;(脖子,那姑且就这么翻吧)6、2个电池盒(2节一组的那种);7、4节5号电池;8、一个纽扣电池;(具体作用稍候你就知道了)9、单极双掷开关;(俗称微动开关)10、拨动开关;11、钉子12、焊锡丝13、一些电线步骤2 施工在这一步关键就是要把电机和轴、轮子连接起来,你可以使用上述材料里准备的齿轮、电机、轮子等用你想到的任何办法把他们有机的组合起来,各自发挥吧,或者你也可以用减速电机完成,你怎么完成它并不关键,关键是完成它就对了。
步骤3把塑料片用胶水固定到电机上,然后在塑料片的两边分别涂上胶水,把电池盒粘在最高处。
(好吧,电池盒和电机之间这段的塑料片就叫做脖子了)步骤4把纽扣电池焊接到微动开关上。
把钉子放在火上加热,穿过塑料片,然后把这个微动开关用胶水粘在这个钉子上。
注意钉子的位置,要保证纽扣电池能正好碰到地面,这很关键。
(这个位置的确定很关键,记得保证机器人垂直于平面)这是这个机器人成功与否的关键。
步骤5根据线路图连接。
步骤6装上电池,让我们看看它是否正常工作吧。
调整微动开关的位置,让它工作的更好。
如果颠倒了,那就更换一下正负极的电线。
后记:这个平衡机器人相当的“简陋”,但是却是不平凡的,首先它用简单的方式实现了倒钟摆的平衡,虽然时间不久,但就其原理来说却是一切平衡机器人的基础,另外它也说明了自动控制的一种重要的控制方式,反馈,闭环反馈,这可能对刚刚接触机器人或者说其他自动控制系统的人的有趣的教育模式;其次,它告诉我们一个事实,人类的想象力是惊人的,也让我们反思,有很多的时候我们用很复杂的方法却来解决很简单的问题,同样却有人用简单的方法来解决复杂的问题。
机器人手指单舵机(QDS4015)组装教程

机器人手指成品图如上所示
组装教程如下:
组装大手指零件,使用M2X3的螺丝,M2X7的铜柱
组装其他手指零件螺丝使用M2X3,M2X7的铜柱
组装手指跟手心零件,使用M2X5普通螺丝、M2的螺母
套入手指拉线,丝口朝下。
指尖使用M2X4的自攻螺丝
注意最新改进版指尖使用的是M2X4或者M2X5的自攻螺丝,并非图示的M2螺丝+螺母,改进的好处更便于手指的扎带的安装。
最新改进版指尖使用的是M2X4或者M2X5的自攻螺丝
安装手背零件,左右各使用2颗M2X4自攻螺丝,
组装手腕连接片,使用M2X5的自攻螺丝,这个时候舵机必须先处于重置状态下即舵机板发送P1500
上正舵盘,保证舵机在P1500重置状态下安装舵盘并保证舵盘其中一个孔位跟舵机保持正90°
连接手指跟手腕零件,使用M2X5普通螺丝、M2螺母
安装U架跟手指拉线压板,螺丝先不要拧死保证压板跟U架之间一定的空隙
先把手指拉线套入U架跟压板中间然后再把U架卡到舵盘上面
固定U架前后三颗M2X4自攻螺丝,并安装前后舵盘M3固定螺丝。
然后把U架往前推,在手指拉线的推动下保证手指再这个时候是接近伸直的状态下,注意保证大手指扎带比其他4跟手指松一些,即扎带多往前推一些,然后拧死U架上面的M2X5的螺丝
线,此状态就是舵机重置后即舵机板发送P1500的手指状态,大手指在食指之上。
自制简易机器人

自制简易机器人自制简易机器人随着科技的不断进步,机器人已经成为了现代社会的重要组成部分。
然而,对于大多数人来说,购买一台完整的机器人可能是一项昂贵的投资。
因此,本文将介绍如何自制一台简易的机器人,以降低成本并实现个性化的需求。
首先,确定机器人的主题和功能。
例如,我们可以制作一个简单的轮式机器人,它可以在家中执行简单的任务,如巡逻和监控。
接下来,我们需要为机器人选择合适的硬件和软件。
硬件方面,我们可以选择Arduino板作为主控板,搭配马达、轮子、传感器等配件。
软件方面,我们可以使用Arduino编程语言来编写机器人的程序。
在准备好硬件和软件之后,我们可以开始设计机器人的电路。
将所有硬件连接起来,确保它们能够正常工作。
接下来,我们需要为机器人设计机械结构,包括机身、轮子、传感器等部分。
可以使用3D打印技术来制作机身,轮子和传感器则可以从电子市场购买。
完成机械结构的设计后,我们可以开始编写机器人的程序。
在Arduino 编程环境中,我们可以使用各种函数和变量来实现机器人的各项功能。
例如,使用电机控制函数来控制马达的转速和方向,使用传感器数据变量来获取传感器的检测结果。
根据需求,我们可以编写不同的程序来实现不同的功能,如自动巡逻、避障、声音控制等。
完成机器人的制作后,我们可以进行测试。
将机器人放在不同的环境中,观察它是否能够正常工作,并记录测试结果。
如果机器人出现了问题,我们可以检查电路和程序,找出问题所在并进行修复。
最后,对自制简易机器人的优缺点进行评价。
优点方面,自制机器人可以降低成本、实现个性化需求、提高技能水平等。
缺点方面,自制机器人的功能和性能可能不如商业产品,且需要花费更多的时间和精力。
针对这些缺点,我们可以进行改进和优化,以提高机器人的性能和质量。
总之,自制简易机器人是一项有趣且具有挑战性的项目。
通过制作机器人,我们可以学习到很多有关机器人技术和电子制作的知识。
自制机器人还可以为我们带来更多的创意和可能性,让我们能够更好地利用技术和实现个性化的需求。
机器人制作方法

机器人制作方法机器人制作是一项非常有趣和具有挑战性的活动。
通过自己动手制作机器人,不仅可以锻炼动手能力,还可以学习到很多关于机械、电子和编程的知识。
下面将介绍一种简单的机器人制作方法,希望能够给大家带来一些启发和帮助。
首先,我们需要准备一些基本的材料和工具,包括电机、轮子、电池盒、开关、导线、螺丝等。
这些材料可以在电子市场或者网上购买到。
另外,我们还需要一块微控制器,比如Arduino或者树莓派,用来控制机器人的运动和行为。
接下来,我们开始组装机器人的机械结构。
首先,将两个电机分别安装在机器人的底盘上,然后再安装轮子到电机的轴上。
接着,将电池盒和开关安装在合适的位置,用来为机器人提供动力。
最后,将微控制器安装在机器人上,并将电机和电池盒通过导线连接到微控制器上。
完成机械结构的组装后,接下来是编写机器人的控制程序。
我们可以使用Arduino或者树莓派的开发环境,编写简单的程序来控制机器人的运动。
比如,我们可以编写程序让机器人前进、后退、左转、右转等基本动作,也可以添加一些传感器,让机器人能够感知周围的环境并做出相应的反应。
最后,进行测试和调试。
在将机器人的机械结构和控制程序都完成后,我们需要进行测试和调试,确保机器人能够按照我们的预期进行运动和行为。
如果发现问题,需要及时进行调整和修正,直到机器人能够正常运行为止。
通过以上的步骤,一个简单的机器人就制作完成了。
当然,这只是一个入门级的机器人制作方法,如果想要制作更复杂、功能更强大的机器人,还需要进一步学习和实践。
希望大家能够通过机器人制作这项活动,培养自己的动手能力和创造力,也能够对机械、电子和编程有更深入的了解和认识。
祝大家制作机器人的过程愉快,也希望大家能够制作出自己满意的机器人作品。
简单的机器人制作教程
简单的机器人制作教程这是一个最简单的机器人,一个振动机器人,即以偏心摆锤马达的震动效果作为挪动的动力,算是一种非常简单的BEAM机器人。
整个造型就像一只臭虫,由于振动时接近狂飙一样的不规则运动方式,所以起名为“暴走的臭虫”。
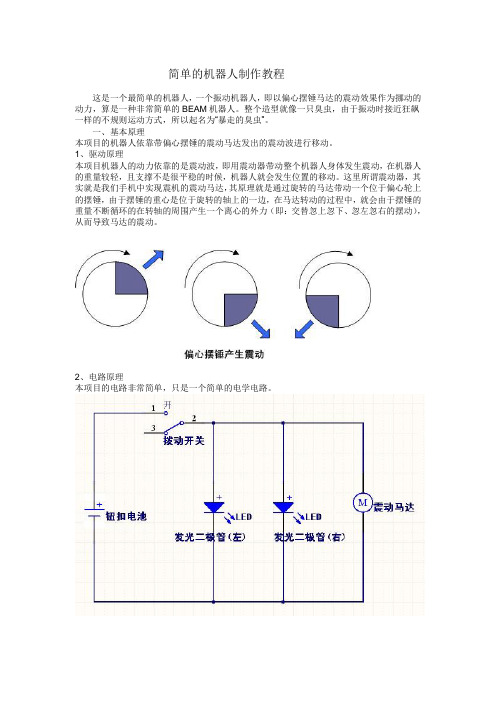
一、基本原理本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
1、驱动原理本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
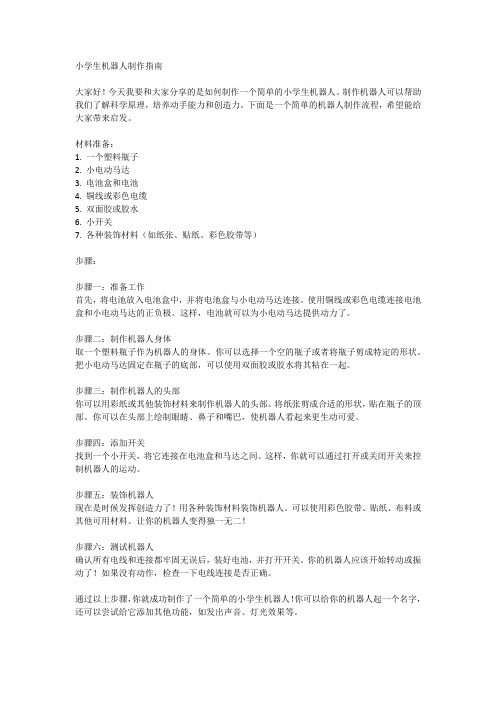
2、电路原理本项目的电路非常简单,只是一个简单的电学电路。
这里我们采用类似电子表所使用的微型钮扣电池作为机器人的能源;采用手机震机用的震动马达作为动力源;采用LED发光二极管作为发光的眼睛;而控制控制机器人启动的开关则是选择一般的小型选择拨动开关。
需要注意的是,一般的选择拨动开关有三个引脚,其中拨动开关可以使中间的引脚(上图之2)有选择的接通两边(上图之1和3)任意一侧的其中一个引脚。
同时,用于做眼睛发光的LED发光二极管的引脚是区分正负极的。
另外提一下,LED发光二极管是有一个启辉电压的,大概是2V多左右,只有供电的电压达到这个值时发光管才会发光。
本项目中,是使用了两只发光二极管作为眼睛的。
机器人开始启动的时候,发光二极管是会发光的,当发现其不亮的时候,就是说明电池的电能已经消耗了不少,电池的电压已经下降到发光二极管无法点亮的程度,这种时候震动马达还是会继续震动的。
因为震动马达启动的电压并不高,在电池的电压已经下降了很多的程度下震动马达还是可以继续工作。
其中注意:1、拨动开关选用1、2两个引脚;2、LED发光二极管的引脚是区分正负极的,要对应连接到电池的正负电极(下面有说明判别的方法);3、钮扣电池的外壳,只有一面金属部分的是负极,整个包住周围以及其中一面的金属部分是正极(见下图所示)。
手工纸机器人制作方法

手工纸机器人制作方法
- 纸板
- 塑料吸管
- 短铅笔
- 填充物(如棉花)
- 胶水或胶带
步骤:
1. 制作机器人身体:用纸板剪出一个矩形,长度为15厘米,宽度为5厘米。
将纸板弯曲成半圆形,然后将两端粘合。
你现在应该有一个圆柱状的身体。
2. 制作机器人头部:用纸板剪出一个正方形,每边长度为5厘米。
将每个角剪掉一些,使其呈现六边形形状。
使用胶水或胶带将头部粘到机器人身体的一端上。
3. 制作机器人手臂:将两个塑料吸管剪成长度相等的小段,然后将每个小段插入到机器人身体两侧的背面表面。
将短铅笔插入每个吸管末端,留下一小段笔尖。
4. 填充机器人身体:将填充物塞进机器人身体,并按需要添加更多。
只留下足够空间以插入电机。
5. 准备电机:从电机中剪下两个电线,然后将它们分别插入电机的正负极。
用胶带将电机附着到机器人身体的另一端,并用胶水固定。
6. 附上机器人的腿部:在机器人身体两侧的下面,附着两个小纸板片来制作机器人的腿部。
将纸板片粘贴到机器人身体上。
7. 使机器人动起来:将电机与电池连接。
当电机运转时,它应该以高速转动,使机器人动起来。
完成!你现在拥有了一个可爱的手工纸机器人。
机器人的制作方法

机器人的制作方法机器人是一种能够模拟人类行为的智能装置,它可以执行各种任务,从工业生产到家庭服务都有广泛的应用。
在现代科技的支持下,制作一个简单的机器人并不是一件难事。
下面我将介绍一种简单的机器人制作方法,希望能够对您有所帮助。
首先,我们需要准备一些基本的材料和零件,电机、轮子、传感器、控制器、电池等。
这些材料可以在电子市场或者网络上购买到,价格也比较实惠。
选择合适的材料是制作机器人的第一步,它直接影响到机器人的性能和功能。
接下来,我们需要设计机器人的外形和结构。
根据机器人的用途和功能,我们可以设计出不同形状和结构的机器人,比如人形机器人、车形机器人等。
设计好外形和结构之后,我们就可以开始组装机器人的各个零部件了。
在组装过程中,需要注意各个零部件之间的连接和固定,保证机器人的稳定性和可靠性。
同时,还需要注意电路的连接和布线,确保机器人的各个部分能够正常工作。
在组装完成后,我们需要对机器人进行一些简单的测试,确保其基本功能正常。
最后,我们需要对机器人进行程序编写和调试。
通过编写程序,我们可以让机器人实现各种功能,比如避障、跟随、寻路等。
在程序编写完成后,我们需要对机器人进行调试,确保其能够按照我们的要求正常工作。
通过以上几个步骤,一个简单的机器人就制作完成了。
当然,这只是一个基础的制作方法,如果想要制作更加复杂和功能强大的机器人,还需要更多的知识和技能。
希望这个制作方法能够给您带来一些启发,也希望您能够在制作机器人的过程中有所收获。
总的来说,机器人的制作并不是一件难事,只要有一定的知识和技能,加上一些耐心和努力,就可以制作出自己满意的机器人。
希望本文的内容能够对您有所帮助,也希望您能够在机器人制作的道路上越走越远。
祝您成功!。
DIY 机器人

人形机器人要让一个机器人能完成各种动作,高中的一些力学,运动学知识自然必不可少。
在构建我们的机器人骨架过程中,主要的运动部件就是舵机了,整个机器人就是靠着舵机轴的转动来完成各种复杂的动作。
在设计整体的结构时候,应该画出各种可能需要做的动作的结构简图(用点线表示)简单计算一下质心高度和位置保证机器人的平衡。
以下是具体的做法:先把舵机看做一个质点,用点加一个小竖线表示舵机的转轴,直线表示两个轴之间的距离,大致画出整体静态草图。
(两点之间的距离至少要大于舵机的高)画出所需完成动作的分解草图,将所有运动都分解为绕给定轴的转动,如果发现有哪些动作无法完成考虑:1.改变轴的排布,方向。
2.增加轴不考虑线的重量,只考虑舵机的重量,对每个草图分别计算各个过程中机器人的平衡状况。
调整舵机间的长度Tips1:每种舵机都会有其尺寸,重量,扭矩,以及转速等说明。
在使用舵机时,应该尽量减小垂直于舵机转轴的受力,不然容易烧坏舵机。
Tips2:舵机只能转180度,在动作中务必排除需要超过180转动的情况1.1 我们的大强要完成什么动作呢?我们要让大强“飞”起来,作为一只金刚,单单飞似乎少了什么,为此我们给大强设计了《金刚》的路线,一路跋山涉水拯救MM(剧情见最后)1. 四足行走由于我们设计的机器人重点放在了手臂上面,故对腿部进行了简化。
行走时采用对角两条腿交替前进的方式。
前进腿(图中箭头标注)向前跨步的同时,支撑腿有一个后蹬的动作以实现行走——俗称“爬”2. 多杠攀爬这时的大强已经开始了艰苦卓绝的翻山越岭之路。
多杠连续攀爬并没有想象中那么简单,考虑到在前进时有一只手必须离开杠,为保持平衡,故采用左右静态摆动身体的姿态前进。
A. 开始时通过肩部舵机作用将重心移动到一只手上(图中为左手)多杠攀爬动作图(1)多杠攀爬动作图(2)B. 放开不支撑身体的手臂(图中右手)向前抓住下一只杠.(左侧一列图是侧视图,右侧一列图是正视时两只手的位置)多杠攀爬各动作图(3)C. 肩部两舵机配合向前移动身体,在身体前进的同时将重心转移到抓住前面横杠的手上(图中右手)D. 放开后面杠上的手(图中左手)并重复上面的动作,实现多杠上的攀爬行走3. 单杠动作终于来到了“她”的身边,到了展现实力的时候了!我们不仅要让大强在多杠上爬行,还要让他在单杠“飞起来”。
机器人的简单制作方法

机器人的简单制作方法1. 嘿,想不想自己做个超酷的机器人呀!其实很简单呢。
就像搭积木一样,把各种零件组装起来就行啦。
比如说,找一些旧的电子产品零件,这就像给机器人准备了一身独特的衣服。
然后把它们巧妙地连接起来,哇塞,一个属于你的机器人就初见雏形啦!你还不赶紧试试?2. 哎呀呀,机器人的制作没那么难啦!首先你得有点想象力,把机器人想象成你的小伙伴。
然后找一些简单的材料,像小马达就像机器人的小心脏一样重要。
把这些东西组合起来,就像给自己创造了一个新的朋友一样有趣,难道不是吗?3. 哇哦,制作机器人超有趣的呢!你可以把它看成是一场冒险。
就好比你去探索一个神秘的岛屿,每一步都充满了新奇。
找合适的工具就像找到宝藏地图,然后一点一点搭建,哇,那种成就感简直爆棚啦,还等什么呢?4. 嘿哟,机器人制作真的不难呀!你看,就像画画一样,先勾勒出大致轮廓。
用各种零件作为画笔,慢慢描绘出机器人的样子。
比如说电池是它的能量源泉,就像画家的颜料一样关键。
快动手吧,你一定能行的,对吧?5. 哈哈,想做机器人就大胆去做呀!把它想象成是一个超大号的玩具。
找些简单的电路就像给玩具装上神奇的机关。
然后看着它动起来,那惊喜感就像打开了一份超级大礼物,你难道不想拥有这样的惊喜吗?6. 哇噻,机器人的简单制作方法来啦!这就好像烹饪一道美味佳肴。
各种材料是食材,你的创意就是独特的调料。
把它们融合在一起,就能做出属于你的独一无二的机器人啦。
别犹豫啦,赶紧开始你的机器人之旅吧!我觉得呀,自己动手制作机器人是一件超级棒的事情,可以充分发挥你的创造力和想象力,还能收获满满的成就感呢!。
小学生的机器人制作
小学生机器人制作指南大家好!今天我要和大家分享的是如何制作一个简单的小学生机器人。
制作机器人可以帮助我们了解科学原理,培养动手能力和创造力。
下面是一个简单的机器人制作流程,希望能给大家带来启发。
材料准备:1. 一个塑料瓶子2. 小电动马达3. 电池盒和电池4. 铜线或彩色电缆5. 双面胶或胶水6. 小开关7. 各种装饰材料(如纸张、贴纸、彩色胶带等)步骤:步骤一:准备工作首先,将电池放入电池盒中,并将电池盒与小电动马达连接。
使用铜线或彩色电缆连接电池盒和小电动马达的正负极。
这样,电池就可以为小电动马达提供动力了。
步骤二:制作机器人身体取一个塑料瓶子作为机器人的身体。
你可以选择一个空的瓶子或者将瓶子剪成特定的形状。
把小电动马达固定在瓶子的底部,可以使用双面胶或胶水将其粘在一起。
步骤三:制作机器人的头部你可以用彩纸或其他装饰材料来制作机器人的头部。
将纸张剪成合适的形状,贴在瓶子的顶部。
你可以在头部上绘制眼睛、鼻子和嘴巴,使机器人看起来更生动可爱。
步骤四:添加开关找到一个小开关,将它连接在电池盒和马达之间。
这样,你就可以通过打开或关闭开关来控制机器人的运动。
步骤五:装饰机器人现在是时候发挥创造力了!用各种装饰材料装饰机器人。
可以使用彩色胶带、贴纸、布料或其他可用材料。
让你的机器人变得独一无二!步骤六:测试机器人确认所有电线和连接都牢固无误后,装好电池,并打开开关。
你的机器人应该开始转动或振动了!如果没有动作,检查一下电线连接是否正确。
通过以上步骤,你就成功制作了一个简单的小学生机器人!你可以给你的机器人起一个名字,还可以尝试给它添加其他功能,如发出声音、灯光效果等。
制作机器人可以培养我们的创造力和动手能力,同时也让我们更好地了解科学原理。
希望这个小小的机器人能陪伴你度过愉快的时光,并激发你对科学和技术的兴趣!祝大家制作成功,谢谢!。
用塑料瓶做机器人简单方法
用塑料瓶做机器人简单方法一。
咱得准备好材料。
啥材料呢?那就是各种各样的塑料瓶,大小不一,形状各异的都来点。
还有剪刀、胶水、颜料、电线、电池这些玩意儿。
1.1 选瓶子。
挑几个看着顺眼,形状适合做机器人身体不同部位的塑料瓶。
比如说,胖胖的瓶子可以当身子,细长的能做胳膊腿儿。
1.2 剪形状。
拿起剪刀,大胆地剪。
把瓶子剪成咱想要的形状,像脑袋得是圆的,胳膊腿儿得有个长条的样子。
这时候可别怕剪坏了,“大胆假设,小心求证”嘛。
二。
接下来就是组装的事儿了。
2.1 连接部件。
用胶水把剪好的部件粘在一起。
脑袋粘在身子上,胳膊腿儿也都各就各位。
这可得粘结实了,别“三天打鱼,两天晒网”,一碰就散架。
2.2 装电路。
要是想让咱这机器人有点高科技的感觉,那就得装个电路。
把电线接好,电池装上,让它能亮个灯或者响个声儿啥的。
这可是个精细活,得“慢工出细活”。
2.3 修饰外观。
外观也很重要啊!用颜料给机器人涂上喜欢的颜色,或者贴上一些小装饰,让它变得“花枝招展”的。
三。
来看看咱们的成果。
3.1 检查一下。
从头到脚检查一遍,看看有没有哪儿没粘好,电路是不是正常工作。
有问题就赶紧“亡羊补牢”。
3.2 展示显摆。
把做好的机器人拿出去给小伙伴们瞅瞅,那叫一个“扬眉吐气”。
让他们都羡慕羡慕咱这心灵手巧的本事。
咋样,用塑料瓶做机器人是不是挺简单有趣的?只要咱有耐心,有想法,就能做出一个独一无二的塑料瓶机器人!。
手工机器人简单的做法

手工机器人简单的做法
手工机器人的制作步骤如下:
1. 准备材料:需要的材料包括硬纸板、塑料瓶、彩色纸张、电路线、电动机、电池盒、开关、LED灯等。
2. 制作机器人的身体:用硬纸板剪切出机器人的身体形状,根据自己喜好可以设计成人形、动物形等。
将身体两侧留出的开口处粘贴好,作为放电路线和电池盒的位置。
3. 制作机器人的头部:利用硬纸板制作机器人的头部形状,可以根据自己的创意设计机器人的表情。
将电动机固定在头部的一侧,与头部连接。
4. 安装电路:将电路线连接到电动机和电池盒上,并根据需要连接LED灯等电子元件。
5. 安装开关:将开关安装在机器人的身体侧面或头部的一侧,这样可以方便控制机器人的开关。
6. 装饰机器人:用彩色纸张等材料为机器人增添装饰,可以给机器人画上眼睛、嘴巴等表情,也可以用纸做出机器人的服装。
7. 完成:经过上述步骤,手工机器人制作完成。
按下开关,机器人就会开始运转了。
注意:制作过程中要注意安全,使用电路时遵守相关电气安全知识,避免触电等意外。
机器人的制作方法和过程
机器人的制作方法和过程嘿,你有没有想过自己动手做一个机器人呀?那可真是超级酷的一件事呢!今天我就来和你唠唠机器人的制作方法和过程。
我有个朋友叫小李,他就是个机器人制作的狂热爱好者。
有一次我去他家玩,一进门就被他那满桌子的零件给惊到了。
他眼睛放光地跟我说:“今天我要给你展示下我做机器人的厉害!”我当时就想,这能行么?就像看着一堆杂乱无章的拼图碎片,能拼出个什么来呢?制作机器人的第一步,那就是要有个好的设计思路。
这就好比盖房子之前得有个蓝图一样重要。
小李告诉我,他在设计这个机器人的时候,脑海里就像在放电影。
他想让这个机器人能在家里帮忙干点简单的活儿,像拿个东西,打扫下小角落啥的。
他说:“你想啊,如果有个小机器人像个小管家一样,那多棒啊!”我当时就觉得他的想法真不错,就像在黑暗中点亮了一盏灯。
有了设计思路后,就得开始收集零件了。
这可不是件轻松的事儿。
就像你去森林里找不同种类的树叶来做一幅独特的画一样。
小李的房间里有各种各样的零件盒,那些小螺丝、小铁片、还有电路板啥的,看得我眼花缭乱。
他说有些零件是他从旧的电子设备里拆出来的,这就像是从废旧的城堡里挖掘宝藏一样。
有些则是他专门去电子市场淘来的。
他在市场里就像个寻宝猎人,眼睛得特别尖,在一堆东西里找到自己想要的。
接下来就是组装啦。
这可真是个精细活儿,就像绣花一样。
小李先拿起了机器人的骨架部分,那是一个用轻质金属做的框架。
他小心翼翼地把螺丝拧进去,嘴里还嘟囔着:“这可不能松了,不然机器人就散架了,那可就成了个破铜烂铁喽。
”我在旁边看着都有点紧张,感觉每一个动作都像是在进行一场精密的手术。
在组装的过程中,电路连接是关键。
那些密密麻麻的线路就像迷宫一样。
小李拿着电烙铁,就像一个拿着魔法棒的魔法师。
他说:“这线路要是接错了,机器人可就像个迷路的孩子,不知道该干啥了。
”他仔细地对照着电路图,把每一根线都连接到正确的位置。
有时候他会皱起眉头,那是遇到难题了。
有时候又会突然笑起来,肯定是解决了一个大麻烦。
机器人的制作方法步骤
机器人的制作方法步骤机器人的制作方法可以分为以下几个步骤,通过这些步骤,你可以制作出一个简单的机器人模型,让它动起来。
第一步,确定机器人的功能和设计。
在制作机器人之前,首先要确定机器人的功能和设计。
你可以考虑机器人的用途,比如是用来做家务助手,还是用来进行娱乐互动等。
同时,你还需要设计机器人的外形,包括大小、形状、颜色等方面的设计。
第二步,选择合适的材料和零部件。
根据机器人的功能和设计,选择合适的材料和零部件。
比如,如果你要制作一个可以移动的机器人,你就需要选择轮子、电机等零部件。
此外,你还需要选择适合的外壳材料,比如塑料、金属等。
第三步,组装机器人的框架。
根据设计图纸,组装机器人的框架。
这包括安装电机、传感器等零部件,同时搭建机器人的外形。
在这一步,需要确保零部件的安装位置和连接方式是准确的,这对机器人后续的功能实现至关重要。
第四步,安装控制系统。
安装机器人的控制系统,这包括主控板、传感器、电路等。
控制系统是机器人的大脑,它可以接收指令,控制机器人的动作和行为。
在这一步,需要确保控制系统的连接正确,同时进行简单的程序编写。
第五步,调试和测试。
完成机器人的组装后,进行调试和测试。
这包括检查各个零部件的工作状态,测试机器人的基本功能,比如移动、感应等。
如果发现问题,及时进行调整和修正,确保机器人的正常运行。
第六步,优化和改进。
根据测试结果,对机器人进行优化和改进。
比如增加新的功能模块,改进机器人的外形设计,提高机器人的性能等。
通过不断的优化和改进,使机器人更加完善。
通过以上步骤,你可以制作出一个简单的机器人模型。
当然,如果你想制作更复杂的机器人,还需要更多的知识和技能。
希望这些步骤对你有所帮助,祝你制作机器人顺利!。
小学生如何自制简易机器人?让家风更智能!

1.在当今科技高度发达的时代,智能机器人已经渗透到我们生活的方方面面。
从智能家居到教育辅助,机器人已经成为了人类生活中不可或缺的一部分。
那么,作为一个小学生,你是否也想亲手制作一个简易的机器人呢?今天,我将教你如何自制一个简单但功能强大的机器人,让家居生活更加智能!2.首先,我们需要准备一些基础材料。
这些材料包括:一个微型主控板(例如Arduino),一些电子元件(例如继电器、传感器、蜂鸣器等),以及一些常见的物品,比如纸板、橡皮筋、线材等。
同时,还需要一点耐心和对机器人的热情。
3.第一步,我们需要构建机器人的机身。
可以使用纸板切割出一个有足够空间容纳电子元件的框架。
确保框架稳固,并且有足够的空隙供电子元件的连接。
4.第二步,我们需要将主控板安装在机身上。
首先,将主控板固定在框架的适当位置上,然后使用螺丝或胶水将其固定。
确保主控板的引脚能够方便地连接到其他电子元件。
5.第三步,连接电子元件。
根据你想要机器人实现的功能,选择合适的电子元件进行连接。
比如,如果你想让机器人能够感应光线,可以连接一个光敏传感器;如果你希望机器人能够发出声音,可以连接一个蜂鸣器。
通过查阅相关资料,了解每个电子元件的引脚连接方法,并谨慎操作。
6.第四步,编写代码。
使用Arduino开发环境,编写代码控制机器人的行为。
首先,需要了解一些基本的编程语法和命令,然后根据自己的需求编写代码。
可以尝试让机器人做出简单的动作,比如前进、后退、转向等。
随着你对编程的理解不断深入,可以尝试更复杂的功能。
7.第五步,测试和调试。
在将机器人完全组装起来之前,可以先逐个测试每个电子元件的功能和连接是否正常。
如果发现问题,可以仔细检查每一步的操作,并重新排查和修复。
8.最后,我们可以为机器人增加一些有趣的装饰物,如眼睛、手臂等。
这不仅可以让机器人更加可爱,也可以让自制的机器人与众不同。
9.自制机器人不仅是一项有趣的实践活动,还能够培养孩子们的创造力和动手能力。
机器人的制作方法步骤

机器人的制作方法步骤制作机器人是一项既有趣又具有挑战性的活动,它涉及到机械、电子、编程等多个领域的知识。
下面将介绍一种简单的机器人制作方法,希望能够帮助大家快速入门。
材料准备。
首先,我们需要准备一些基本的材料,包括电机、轮子、螺丝、螺母、导线、电池盒、开关、遥控器等。
这些材料可以在电子市场或者网络上购买到,价格也比较实惠。
机械结构搭建。
接下来,我们开始搭建机器人的机械结构。
首先,将两个电机固定在底盘上,然后安装轮子到电机轴上。
接着,将电池盒和开关安装在机器人的合适位置上,确保电路连接正确,避免出现短路或者其他问题。
电路连接。
完成机械结构后,我们需要进行电路连接。
首先,将电机与电池盒通过导线连接起来,然后接入开关和遥控器。
在连接电路的过程中,一定要注意极性的正确性,避免损坏电子元件。
程序编写。
接下来,我们需要编写机器人的控制程序。
可以使用Arduino、树莓派等开发板,通过简单的编程语言来控制机器人的运动。
编写程序时,需要考虑机器人的运动逻辑、遥控器的信号解析等问题,确保程序的稳定性和可靠性。
调试测试。
完成程序编写后,我们需要对机器人进行调试测试。
首先,确认电路连接正确,然后通过遥控器来控制机器人的运动,观察是否符合预期。
在调试测试过程中,可能会出现一些问题,需要及时排查并解决。
优化改进。
最后,根据调试测试的结果,对机器人进行优化改进。
可以调整电机的转速、增加传感器模块、改进程序算法等,提高机器人的性能和稳定性。
优化改进是一个不断迭代的过程,需要耐心和细心。
总结。
通过以上步骤,我们就可以制作出一个简单的机器人。
当然,机器人制作的过程中还有很多细节和技巧,需要我们不断学习和积累经验。
希望大家可以通过制作机器人,对机械、电子、编程等知识有更深入的了解,同时也能够培养动手能力和创造力。
祝大家制作机器人顺利,玩得开心!。
废旧材料制作机器人

废旧材料制作机器人在现代社会,废旧材料的回收利用已经成为一种重要的环保行动。
而除了简单的回收利用外,我们还可以将废旧材料用来制作机器人,这不仅可以减少废物对环境的污染,还可以发挥废旧材料的潜力,创造出有趣的作品。
接下来,我将介绍一些废旧材料制作机器人的方法和注意事项。
首先,我们需要准备一些废旧材料,比如废纸板、废塑料瓶、废旧电子零件等。
这些废旧材料通常可以在我们的日常生活中找到,比如废纸板可以来自包装盒,废塑料瓶可以来自饮料瓶,废旧电子零件可以来自旧电子设备的拆解。
通过收集这些废旧材料,我们就可以开始制作机器人了。
其次,我们需要设计机器人的外形和功能。
根据我们手头的废旧材料,我们可以灵活地设计出各种形态各异的机器人,比如人形机器人、动物机器人、甚至是外星机器人。
同时,我们还可以根据废旧电子零件的功能,为机器人添加一些简单的动作和声音效果,让机器人看起来更加生动有趣。
接着,我们可以开始组装机器人。
根据设计好的外形和功能,我们可以利用胶水、胶带、螺丝等工具将废旧材料组装成机器人的各个部件,然后再将这些部件组装在一起,最终完成一个废旧材料制作的机器人作品。
在组装的过程中,我们需要注意材料的稳固性和安全性,确保机器人在使用过程中不会出现意外情况。
最后,我们可以为机器人添加一些装饰和涂装。
通过添加一些色彩斑斓的装饰和涂装,我们可以让机器人看起来更加美观,同时也可以为机器人赋予更多的个性和特色。
这样制作出来的废旧材料机器人不仅可以作为装饰摆件,还可以成为孩子们的玩具,或者是科普教育的展示品。
总的来说,废旧材料制作机器人是一项有趣而有意义的活动。
通过这种方式,我们不仅可以减少废物对环境的污染,还可以发挥废旧材料的潜力,创造出有趣的作品。
希望大家可以尝试一下,通过自己的双手,为废旧材料赋予新的生命,创造出更多有趣的机器人作品。
让我们一起行动起来,为环保事业贡献一份力量!。
教你做机器人

教你做机器人大标题:教你做机器人一、介绍机器人一直是人们津津乐道的话题,它们有着广泛的应用领域,如工业生产、医疗辅助和日常家居。
在本文中,我将教你如何制作一个功能全面、操作简单的机器人。
二、准备材料在开始之前,我们需要准备以下材料:1. Arduino板:作为机器人的核心,它提供了控制机器人各个部分的接口。
2. 舵机:用于控制机器人的运动,如转动头部和四肢。
3. 红外传感器:用于检测前方的障碍物,以便机器人能够避开障碍。
4. 超声波传感器:用于检测机器人周围的距离和物体。
5. 电池供电:为机器人提供电源。
三、机器人装配1. 连接舵机:将舵机连接到Arduino板的对应接口,确保舵机能够自由转动。
2. 连接传感器:将红外传感器和超声波传感器连接到Arduino板的对应接口。
3. 连接电池:将电池连接到Arduino板上的电源接口,确保机器人能够正常工作。
四、编程1. 安装Arduino IDE:从官方网站下载并安装Arduino IDE,这将用于编写控制机器人的代码。
2. 编写代码:打开Arduino IDE,编写代码以控制机器人的动作和反应。
你可以根据自己的需求,编写机器人跟随线路、避开障碍物或执行其他功能的代码。
3. 上传代码:将编写好的代码上传到Arduino板,通过USB连接线将Arduino板连接到电脑上,点击上传按钮将代码上传至Arduino板上。
五、调试和测试1. 运行机器人:将机器人放置在平坦的地面上,打开电源,观察机器人是否按照代码的指令进行动作。
2. 调试代码:如果机器人的运行不符合预期,你可以通过检查代码,确认传感器和舵机的连接是否正确,以及代码是否编写正确等。
3. 测试功能:验证机器人是否能够正常地避开障碍物、跟随线路等功能。
你可以在不同的环境下测试机器人的性能,如在室内和室外环境中测试距离传感器的准确性。
六、进一步探索完成以上步骤后,你已经制作了一个基础的机器人。
如果你对机器人的功能还不满意,你可以进一步学习和探索以下内容:1. 学习更多的传感器:如温度传感器、光线传感器等,它们将为你的机器人增加更多的功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如果你觉得人形机器人制作很复杂,那么试试机械臂吧,假如你还觉得困难,那么这款单伺服蠕动机器人就是你最后的选择了。
它只靠一个舵机控制行走,一块Arduino mini和3D打印部件是它整个身体的主要组成部分,在完善设计的同时为后续的搭建开发提供了一个平台。
它可以前进以及引导左和右,现在它还没有传感器,只能直线行走,后续可以增加两个光传感器或者添加一个距离传感器,这样它就可以自我控制左右和避开障碍了
项目材料:一块一块Arduino mini控制板
一台3D打印机(打印机器人3D部件)
一块锂电池
三条捆扎带
一个9克舵机
一块洞洞板焊接的扩展板(包含整流二极管1个、开关1个、5v充电插口1个、
排针和插座)
热熔胶枪
透明热缩管
O型密封圈2个
【制作过程】
第一步,打印机器人主体结构部分。
1、用1.75mmPLA线材打印机器人结构主体,将打印填充率设置为70%。
2、将机器人两前腿装上O型密封圈(我这里用海绵圈代替),接着把两腿装入头部活动支架,安装好舵机座。
3、用3根捆扎带分别将头部活动支架和舵机固定起来,并把舵机伺服转角用螺丝安装好。
4、将机器人头部和身体用螺丝与舵机转轴链接起来,考虑到控制板和电池质量较轻,机器人身体平衡和脚部摩擦力下降,影响蠕动机器人前进行动的速度,这里我用一块废旧9V电池安装在底盘上来调节重心,为了美观我并没有用捆扎带来固定电池,而是用热熔胶固定。
第二部分,Arduino控制扩展板焊接。
1、焊接Arduino控制板及扩展板,由于时间关系我没有用绘图软件画接线图,我只用笔随便画了一下简单的接线图,大家不要介意能看懂就行。
按照电路图焊接好控制板后剪一段透明热缩管套在控制主板,用热风枪对其加热收缩,这个主要是保护主板防止人体静电,冬天嘛你懂得。
2、接着当然还没结束,还有程序呢?!都说了每个人都能轻轻松松制作出来的机器人,程序就这么简单!
3、最后把程序上传到Arduino板子里,到这一步蠕动机器人的制作基本上就算完成了,上图看看最终完成的样子,看起来好厉害的样子,现在我就知道你也想制作一个是吧?没关系已经把3D模型的文件附到文章结尾处了。
【总结】这个平台大家如果有兴趣的话可以继续扩展一下,让它的功能更多些,当然它也可以几个串联在一起开发像仿生毛毛虫什么的都行。