智能电动车寻迹系统设计
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着人工智能与自动控制技术的快速发展,智能小车已经广泛应用于各种领域,如物流配送、环境监测、智能家居等。
本文将详细介绍一种自循迹智能小车控制系统的设计与实现过程,该系统能够根据预设路径实现自主循迹、避障及精确控制。
二、系统设计(一)系统概述自循迹智能小车控制系统主要由控制系统硬件、传感器模块、电机驱动模块等组成。
其中,控制系统硬件采用高性能单片机或微处理器作为主控芯片,实现对小车的控制。
传感器模块包括超声波测距传感器、红外线测距传感器等,用于感知周围环境并实时传输数据给主控芯片。
电机驱动模块负责驱动小车行驶。
(二)硬件设计1. 主控芯片:采用高性能单片机或微处理器,具备高精度计算能力、实时响应和良好的可扩展性。
2. 传感器模块:包括超声波测距传感器和红外线测距传感器。
超声波测距传感器用于测量小车与障碍物之间的距离,红外线测距传感器用于检测小车行驶路径上的标志线。
3. 电机驱动模块:采用直流电机和电机驱动器,实现对小车的精确控制。
4. 电源模块:为整个系统提供稳定的电源供应。
(三)软件设计1. 控制系统软件采用模块化设计,包括主控程序、传感器数据处理程序、电机控制程序等。
2. 主控程序负责整个系统的协调与控制,根据传感器数据实时调整小车的行驶状态。
3. 传感器数据处理程序负责对传感器数据进行处理和分析,包括距离测量、方向判断等。
4. 电机控制程序根据主控程序的指令,控制电机的运转,实现小车的精确控制。
(四)系统实现根据设计需求,通过电路设计与焊接、传感器模块的安装与调试、电机驱动模块的安装与调试等步骤,完成自循迹智能小车控制系统的硬件实现。
在软件方面,编写各模块的程序代码,并进行调试与优化,确保系统能够正常运行并实现预期功能。
三、系统功能实现及测试(一)自循迹功能实现自循迹功能通过红外线测距传感器实现。
当小车行驶时,红外线测距传感器不断检测地面上的标志线,并根据检测结果调整小车的行驶方向,使小车始终沿着预设路径行驶。
2024年度-智能循迹小车设计
智能循迹小车设计目录•项目背景与意义•系统总体设计•循迹算法研究•控制系统设计•调试与测试•项目成果展示•总结与展望01项目背景与意义智能循迹小车概述定义智能循迹小车是一种基于微控制器、传感器和执行器等技术的自主导航小车,能够按照预定路径进行自动循迹。
工作原理通过红外、超声波等传感器感知周围环境信息,将感知数据传输给微控制器进行处理,微控制器根据预设算法控制执行器调整小车行驶状态,实现循迹功能。
随着工业自动化的发展,智能循迹小车在生产线、仓库等场景中的应用需求不断增加。
自动化需求教育领域需求娱乐领域需求智能循迹小车作为教学实验平台,在高等教育、职业教育等领域具有广泛应用前景。
智能循迹小车可以作为玩具或模型车进行娱乐竞技活动,满足消费者休闲娱乐需求。
030201市场需求分析通过本项目的研究与实践,掌握智能循迹小车的核心技术,包括传感器技术、微控制器技术、控制算法等。
技术目标将智能循迹小车应用于实际场景中,提高生产效率、降低成本、提升产品品质等方面的效益。
应用目标通过智能循迹小车的研发与教学应用,培养学生动手实践能力、创新精神和团队协作能力。
教育意义推动智能循迹小车相关产业的发展,促进就业和经济增长,提升国家科技竞争力。
社会意义项目目标与意义02系统总体设计主控制器传感器模块电机驱动模块电源管理模块总体架构设计01020304负责接收和处理传感器数据,控制小车运动。
包括红外传感器、超声波传感器等,用于感知环境和障碍物。
驱动小车前进、后退、转弯等动作。
为整个系统提供稳定可靠的电源。
硬件选型及配置选用高性能、低功耗的微控制器,如STM32系列。
选用高灵敏度、低误差的传感器,如红外反射式传感器、超声波测距传感器等。
选用高效、稳定的电机驱动器,如L298N电机驱动板。
选用合适的电池和电源管理芯片,确保系统长时间稳定运行。
主控制器传感器模块电机驱动模块电源管理模块初始化模块传感器数据处理模块运动控制模块调试与测试模块软件功能划分负责系统启动时的初始化工作,包括硬件初始化、参数设置等。
循迹智能电动车
兰州职业技术学院信息工程系循迹智能电动车(技术说明)制作成员:朱家鸿史晶宏刘一庆郎晓辉指导教师:梁璐目录一、系统设计 (3)1、设计要求 (3)2、电动车循迹的原理 (3)3、模块方案制定 (4)3.1车体设计 (4)3.2控制器模块 (4)3.3电源模块 (5)3.4稳压模块 (6)3.5循迹传感器模块 (6)3.6电机模块 (8)3.7电机驱动模块 (8)二、硬件实现及单元电路设计 (9)1、光电对管电路的设计 (9)2、循迹光电对管的安装 (10)3、传感器数据处理及循迹过程 (11)4、电机驱动电路的设计 (11)三、系统功能测试 (11)4.1测试仪器及设备 (11)4.2功能测试 (11)四、总结 (12)五、结束语 (12)六、参考文献 (12)七.关于我们 (13)一点心得体会: (13)一、系统设计1、设计要求(1)循迹智能电动车(以下简称:电动车)从轨道内任意区域启动。
(2)电动车按指定路线运行,自动区分直线轨道和弯路轨道,在指定弯路处拐弯,实现灵活前进、转弯等功能。
循迹路线如图1所示。
(3)电动车完成指定运行任务后,自动返回出发起点,并且能够正、反循迹。
(3)具备障碍物识别功能。
(3(3图1 循迹路线2、电动车循迹原理循迹是指电动车在白色地板上分辨出一定宽度的黑线,并能循着黑线行走。
设计中我们采取红外探测法,即利用红外传感器发射的红外线在不同颜色的物体表面具有不同的反射性质的特点,在电动车行驶过程中,传感器不断地向地面发射红外光,当红外光遇到白色地板时发生反射,反射光被传感器的接收管接收到,从而判断出是白色地面;如果遇到黑线则红外光被吸收,电动车传感器的接收管接收不到红外光,从而判断出是黑色地面。
本车选用的红外传感器探测距离最大1.5cm。
3、模块方案制定根据设计要求,本系统主要由控制器模块、电源模块、循迹传感器模块、直流电机及其驱动模块、电压比较模块等模块构成。
(系统总体框图见附录一)3.1车体设计经过反复考虑,我们制定了后方左右两轮分别驱动,前方万向轮转向的方案。
智能循迹小车设计与实现

智能循迹小车设计与实现摘要:智能循迹小车是一种能够根据预设的路径自动行驶的装置。
本文主要介绍了智能循迹小车的设计与实现过程,包括硬件设计、软件编程以及测试和优化等内容。
通过使用光电传感器和电机驱动模块,实现了小车的自动行驶功能。
实验结果表明,智能循迹小车能够准确地沿着指定的路径行驶。
关键词:智能循迹小车,光电传感器,电机驱动模块1.引言智能循迹小车是一种基于传感器和控制模块的自动驾驶装置。
它能够通过感知周围环境并根据预先设定的路径进行行驶。
智能循迹小车在工业生产、仓储管理和物流配送等领域具有广泛的应用前景。
本文主要介绍了智能循迹小车的设计与实现过程。
2.硬件设计主控模块采用单片机作为核心处理器,并配备了存储器、通信接口和控制信号输出等功能。
传感器模块主要由光电传感器组成,用于感知小车当前位置和行驶方向。
执行器模块由电机驱动模块组成,用于控制小车的移动。
3.软件编程传感器数据采集模块负责读取光电传感器的输出信号,并进行信号处理和滤波。
路径规划模块通过分析传感器数据,确定小车当前位置和行驶方向,并根据预设的路径规划算法,确定下一步行驶方向。
运动控制模块通过调节电机驱动模块的输入信号,控制小车的运动。
4.测试与优化为了验证智能循迹小车的性能,我们进行了一系列的测试和优化。
首先,我们对传感器进行了校准,以确保其输出信号的准确性。
然后,我们在实际场景中对小车进行了测试,包括行驶精度、速度和稳定性等方面的测试。
根据测试结果,我们对软件进行了调优,并对硬件进行了优化,以提高智能循迹小车的性能。
5.结论本文介绍了智能循迹小车的设计与实现过程。
通过使用光电传感器和电机驱动模块,我们实现了小车的自动行驶功能。
实验表明,智能循迹小车能够准确地沿着指定的路径行驶。
未来,我们将进一步改进小车的设计和算法,以提高其性能和适应性。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的不断发展,智能小车作为智能交通系统的重要组成部分,在日常生活和工业生产中得到了广泛的应用。
自循迹智能小车控制系统作为小车的核心部分,其设计与实现对于提高小车的自主导航能力和运行效率具有重要意义。
本文将详细介绍自循迹智能小车控制系统的设计与实现过程。
二、系统需求分析在系统设计之前,首先需要对自循迹智能小车控制系统的需求进行分析。
该系统需要具备以下功能:能够自主循迹、避障、路径规划以及实时反馈信息等功能。
此外,还需要考虑系统的实时性、稳定性和可靠性。
在明确了需求之后,我们才能有针对性地进行系统设计。
三、硬件设计自循迹智能小车的硬件设计主要包括传感器模块、控制模块、驱动模块和电源模块等部分。
传感器模块包括红外传感器、摄像头等,用于检测道路信息和障碍物信息;控制模块采用高性能的微控制器,负责处理传感器信息并发出控制指令;驱动模块根据控制指令驱动小车前进、后退、左转或右转;电源模块为整个系统提供稳定的电源。
四、软件设计软件设计是自循迹智能小车控制系统的核心部分,主要包括算法设计和程序编写。
算法设计包括循迹算法、避障算法和路径规划算法等。
循迹算法通过分析道路信息,使小车沿着预定路线行驶;避障算法通过分析障碍物信息,使小车能够及时避开障碍物;路径规划算法根据实时道路信息和障碍物信息,为小车规划出最优路径。
程序编写采用C语言或Python等编程语言,实现算法的逻辑控制和数据交互。
五、系统实现在硬件和软件设计完成后,开始进行系统的实现。
首先,将传感器模块与微控制器连接,实现传感器信息的采集与传输;其次,编写程序实现算法的逻辑控制和数据交互;最后,对驱动模块进行控制,使小车按照预定路线行驶。
在实现过程中,需要注意系统的实时性、稳定性和可靠性。
六、实验与测试为了验证自循迹智能小车控制系统的性能,我们进行了实验与测试。
首先,在室内和室外环境下进行循迹实验,测试小车是否能够准确沿着预定路线行驶;其次,进行避障实验,测试小车是否能够及时避开障碍物;最后,进行路径规划实验,测试小车是否能够根据实时道路信息和障碍物信息规划出最优路径。
《2024年基于电磁信号的智能寻迹车设计》范文
《基于电磁信号的智能寻迹车设计》篇一一、引言随着科技的不断发展,智能寻迹车在工业、军事、救援、教育等领域的应用越来越广泛。
本文将介绍一种基于电磁信号的智能寻迹车设计,通过电磁信号进行定位和寻迹,实现了自动导航和精确控制,具有广阔的应用前景。
二、系统设计1. 总体设计本设计的智能寻迹车主要由车身、控制系统、电机驱动系统、电磁信号接收与处理模块等部分组成。
其中,控制系统是整个系统的核心,负责接收和处理电磁信号,控制电机驱动系统实现车辆的寻迹和导航。
2. 控制系统设计控制系统采用微控制器作为核心处理器,通过接收电磁信号接收与处理模块传来的信号,对电机驱动系统发出控制指令,实现车辆的寻迹和导航。
同时,控制系统还具有自我学习和优化功能,能够根据实际环境自动调整寻迹策略,提高寻迹精度和稳定性。
3. 电机驱动系统设计电机驱动系统采用直流电机和驱动器组成,通过控制器的指令驱动电机转动,实现车辆的移动和转向。
此外,电机驱动系统还具有过载保护和热保护功能,保证了车辆在复杂环境下的稳定性和安全性。
4. 电磁信号接收与处理模块设计电磁信号接收与处理模块是本设计的关键部分,负责接收周围环境的电磁信号并进行处理。
该模块采用高灵敏度传感器和信号处理电路,能够准确捕捉到周围的电磁信号,并通过控制器进行解析和处理,为车辆的寻迹和导航提供精确的依据。
三、工作原理本设计的智能寻迹车通过电磁信号接收与处理模块接收周围环境的电磁信号,经过处理后传输给控制系统。
控制系统根据信号的强度和方向等信息,发出控制指令给电机驱动系统,驱动车辆按照预设的路线进行寻迹和导航。
同时,控制系统还具有自我学习和优化功能,能够根据实际环境自动调整寻迹策略,提高寻迹精度和稳定性。
四、应用领域基于电磁信号的智能寻迹车具有广泛的应用前景。
它可以应用于工业生产中的物料搬运、生产线巡检等场景;在军事领域中可以用于战场侦察、物资运输等任务;在救援领域中可以用于灾区搜索、救援物资运输等场景;在教育领域中可以用于机器人教育、科技竞赛等活动。
毕业设计---基于光电传感器的自动循迹智能车系统设计
摘要新一代汽车研究与开发将集中表现在信息技术、微电子技术、计算机技术、智能自动化技术、人工智能技术、网络技术、通信技术在汽车上的应用。
智能汽车是是现代汽车发展的方向。
大学生智能车比赛是智能汽车设计的一个实践平台,光电传感器的自动循迹智能车系统,采用光电传感器作为道路信息的采集传感器,单片机为控制系统的核心来处理信号和控制小车行驶。
MC9S12系列单片机在汽车电子控制领域得到广泛应用。
本课题就是利用Freescale的MC9S12XS128微控制器对智能车系统进行设计。
智能车系统设计包括硬件电路和控制软件系统的设计。
硬件系统使用专门软件Altium Designer设计。
硬件电路系统主要包括freescale单片机最小系统、电源管理系统、路径识别与检测系统、电机驱动系统。
而控制系统软件的设计主要包括单片机的初始化、PID控制算法、路径识别算法、舵机控制算法、速度控制算法。
软件设计是用Freescale公司的Codewarrior软件作为软件开发和仿真下载的平台。
最后完成了整个自动循迹智能车系统设计。
关键字:智能车;光电传感器;自动循迹;控制算法;PID;I基于光电传感器的自动循迹智能车系统设计ABSTRACTThe design of autoguiding smartcar system based onphotoelectric sensorN ew generation automobile development and researched focus on information technology, microelectronic technology, computer technology, intelligent automation technology, artificial intelligence technology, networking technology, communication technology and so on. The intelligent automobile is the direction in which the modern automobile developed.The university students intelligence vehicle competition is a practice platform in which intelligence automobile designed , we use the photoelectric sensor as gathering sensor to take path information , The microcontroller is used as the control system core ,and process the signal, and controls car to run . signal-chip microcomputer MC9S12 series be widespread utilized in the automobile electronic control domain. I use the Freescale microcontroller MC9S12XS128 to design the intelligent vehicle system. The design of intelligent vehicle system including hardware circuit and control software system. I adopt the software of electronics design Altium Designer to complete designing the hardware . Hardware circuit system mainly includes the freescale ’s Single-chip Microcomputer smallest system, the power source management system , the way recognition and the detecting system, the motor-driven system. But the control software system mainly includes Single-chip Microcomputer 's initialization, the PID control algorithm, the way recognition algorithm, the steering engine control algorithm, the speed control algorithm . It uses Freescale Corporation's Codewarrior as the software development ,the simulation and downloading…s platform in the software designing . Finally The design of auto track smartcar system based on photoelectric sensor is completed.Key words: Intelligent vehicle; photoelectric Sensor; auto track; Control algorithm ;PID;II摘要 (I)ABSTRACT ........................................................................................................................ I I 插图清单 (I)第1章绪论................................................................................................................. - 1 -1.1 毕业设计(论文)内容及研究意义(价值)............................................. - 1 -1.2 毕业设计(论文)研究现状和发展趋势..................................................... - 2 -第2章控制系统整体方案设计................................................................................... - 3 -2.1 整体设计方案概述........................................................................................... - 3 -2.2 控制系统整体方案设计................................................................................. - 4 -2.2.1 模型车硬件整体方案设计...................................................................... - 4 -2.2.2 系统软件模块分析 ................................................................................. - 7 -2.2.3 控制算法设计方案 ................................................................................. - 8 -第3章单片机最小系统模块....................................................................................... - 9 -3.1 单片机以及最小系统简介............................................................................... - 9 -3.2 MC9S12XS128最小系统设计 ...................................................................... - 9 - 第4章电源管理模块................................................................................................. - 11 -第5章路径识别模块和测速检测模块..................................................................... - 13 -5.1 路径识别模块................................................................................................. - 13 -5.1.1 光电传感器 ........................................................................................... - 13 -5.1.2 光电传感器发射与接收电路设计 ....................................................... - 13 -5.1.3 路径识别传感器布局设计 ................................................................... - 14 -5.2 测速检测模块 .......................................................................................... - 16 -第6章电机驱动模块................................................................................................. - 19 -6.1 直流电机驱动模块......................................................................................... - 19 -6.1.1 电机的工作原理 ................................................................................... - 19 -6.1.2 MC33886介绍....................................................................................... - 21 -6.1.3 PWM信号控制电机的转速.................................................................. - 22 -6.2 舵机驱动模块............................................................................................... - 23 -第7章智能车软件的设计......................................................................................... - 29 -7.1 单片机初始化................................................................................................. - 30 -7.2 PID控制算法 ............................................................................................... - 32 -7.3 路径识别算法............................................................................................... - 34 -7.4 舵机控制算法............................................................................................... - 34 -7.5 速度控制算法............................................................................................... - 36 -I基于光电传感器的自动循迹智能车系统设计第8章开发制作与调试............................................................................................. - 38 -8.1 CodewarriorV4.7软件及其应用.................................................................. - 38 -8.2 BDM for S12的使用.................................................................................... - 43 -结论和展望................................................................................................................... - 44 - 致谢........................................................................................................................... - 45 - 参考文献....................................................................................................................... - 46 - 主要参考文献摘要....................................................................................................... - 48 - 附录A ........................................................................................................................... - 50 -II插图清单图2-1 系统信息的控制流程图....................................... - 4 - 图2-2 智能车控制系统整体结构图................................... - 5 - 图2-3 系统硬件结构图............................................. - 6 - 图2-4 系统软件结构............................................... - 7 - 图3-1 最小系统原理图和PCB图.................................... - 10 - 图4-1 电源系统结构框图.......................................... - 11 - 图4-2 LM7805电路图.............................................. - 12 - 图4-3 LM7806电路图.............................................. - 12 - 图5-1 光电传感器的基本组成...................................... - 13 - 图5-2 单对红外传感器电路图...................................... - 14 - 图5-3 红外探测布局的PCB图...................................... - 16 - 图5-4 霍尔原理.................................................. - 17 - 图5-5 霍尔测速电路图............................................ - 18 - 图6-1 H桥式电机驱动电路......................................... - 20 - 图6-2 H桥电路驱动电机顺时针转动................................. - 20 - 图6-3 H桥电路驱动电机逆时针转动................................. - 21 - 图6-4 MC33886电机驱动原理图..................................... - 22 - 图6-5 舵机工作原理示意图........................................ - 24 - 图6-6 舵机输出转角与控制信号脉宽之间关系........................ - 25 - 图6-7 不同占空比的PWM波形控制的转向伺服电机状态图.............. - 26 - 图6-8 转向伺服电机控制方法图.................................... - 27 - 图6-9 舵机转角控制模块程序流程图................................ - 28 - 图7-1 光电传感器方案主程序流程图................................ - 29 - 图7-2 典型PID控制结构.......................................... - 33 - 图7-3 舵机控制流程图............................................ - 35 - 图7-4 速度控制流程图............................................ - 37 - 图8-1 CodearrierV4.7 创建新的工程窗口........................... - 40 - 图8-2 CodearrierV4.7的工程的初始设置窗口........................ - 41 - 图8-3 CodearrierV4.7的编译窗口.................................. - 42 -图8-4 BDM的PCB原理图........................................... - 43 -I第1章绪论自动循迹智能车是一个集环境感知、规划决策、自动驾驶等多种功能于一体的综合系统。
智能双线循迹车
智能双线循迹车
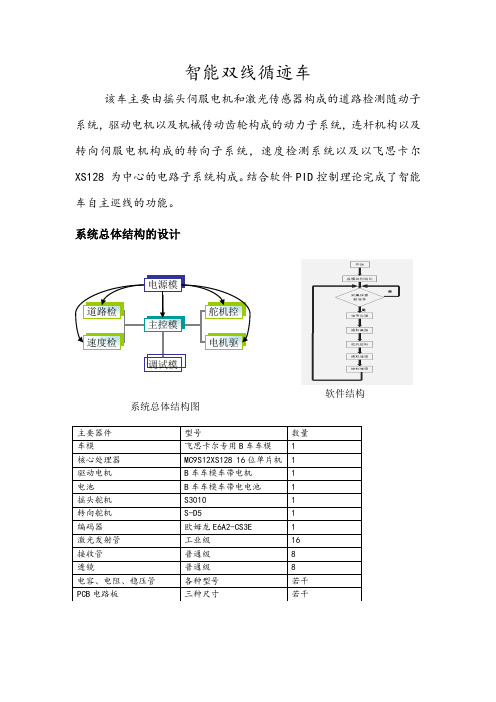
该车主要由摇头伺服电机和激光传感器构成的道路检测随动子系统,驱动电机以及机械传动齿轮构成的动力子系统,连杆机构以及转向伺服电机构成的转向子系统,速度检测系统以及以飞思卡尔XS128 为中心的电路子系统构成。
结合软件PID 控制理论完成了智能车自主巡线的功能。
系统总体结构的设计
软件结构 系统总体结构图
主要器件 型号
数量 车模 飞思卡尔专用B 车车模 1 核心处理器
MC9S12XS128 16位单片机
1
驱动电机 B 车车模车带电机 1 电池 B 车车模车带电电池 1 摇头舵机
S3010
1 主控模
道路检
速度检
舵机控电机驱
电源模
调试模
转向舵机S-D5 1 编码器欧姆龙E6A2-CS3E 1 激光发射管工业级16 接收管普通级8 透镜普通级8 电容、电阻、稳压管各种型号若干PCB电路板三种尺寸若干。
智能循迹小车设计方案
智能循迹小车设计方案一、设计目标:1.实现智能循迹功能,能够沿着预定轨迹自动行驶。
2.具备避障功能,能够识别前方的障碍物并及时避开。
3.具备远程遥控功能,方便用户进行操作和控制。
4.具备数据上报功能,能够实时反馈运行状态和数据。
二、硬件设计:1.主控模块:使用单片机或者开发板作为主控模块,负责控制整个小车的运行和数据处理。
2.传感器模块:-光电循迹传感器:用于检测小车当前位置,根据光线的反射情况确定移动方向。
-超声波传感器:用于检测前方是否有障碍物,通过测量障碍物距离来判断是否需要避开。
3.驱动模块:-电机和轮子:用于实现小车的运动,可选用直流电机或者步进电机,轮子要具备良好的抓地力和摩擦力。
-舵机:用于实现小车的转向,根据循迹传感器的信号来控制舵机的角度。
4.通信模块:-Wi-Fi模块:用于实现远程遥控功能,将小车与遥控设备连接在同一个无线网络中,通过网络通信进行控制。
-数据传输模块:用于实现数据上报功能,将小车的运行状态和数据通过无线通信传输到指定的接收端。
三、软件设计:1.循迹算法:根据光电循迹传感器的反馈信号,确定小车的行进方向。
为了提高循迹的精度和稳定性,可以采用PID控制算法进行修正。
2.避障算法:通过超声波传感器检测前方障碍物的距离,当距离过近时,触发避障算法,通过调整小车的行进方向来避开障碍物。
3.遥控功能:通过Wi-Fi模块与遥控设备建立连接,接收遥控指令并解析,根据指令调整小车的运动状态。
4.数据上报功能:定时采集小车的各项运行数据,并通过数据传输模块将数据发送到指定的接收端,供用户进行实时监测和分析。
四、系统实现:1.硬件组装:根据设计要求进行硬件的组装和连接,确保各个模块之间的正常通信。
2.软件编程:根据功能要求,进行主控模块的编程,实现循迹、避障、遥控和数据上报等功能。
3.调试测试:对整个系统进行调试和测试,确保各项功能正常运行,并进行性能和稳定性的优化。
4.用户界面设计:设计一个用户友好的界面,实现对小车的远程控制和数据监测,提供良好的用户体验。
循迹智能车的设计与制作实验报告

电子技术选修课姓名:学号:专业:题目:循迹智能车的设计与制作实验报告设计地点:设计日期:成绩:指导老师:2015年4月10日一、硬件组装:1、车模套件1万向轮2车底板3驱动轮4主控板5传感器2、车模组装车模组装一:万向轮的安装车模组装二:驱动轮安装1上长脚螺丝2上专用紧固件3固定轮子4固定到小车底盘上(提前焊接电机连接线)二、硬件电路设计与制作1硬件构成原理图2硬件组成1检测单元控制器利用安装于车体前方的循迹传感器实时检测小车的位置,根据小车所处的位置及时调整小车的运行速度和方向,使得小车能够始终沿着引导线运行。
红外对管光电传感器,采用软件编程实现数字化编码。
红外对管:检测原理:当发射管发出的光线照射在赛道的不同位置时,接收管的状态发生较大变化,通过相应的处理电路就可以获得此时的状态值,进行路径的判断。
贴近白色赛道,传感器输出电压达到最大值:约4.7V;远离白色赛道,传感器输出电压达到最小值:约0.2V;贴近黑色赛道,传感器输出电压:约为0.7V。
为保证循迹智能汽车能够按照赛道引导线运行,一般需要多个传感器同时检测赛道。
理论上讲,所用的传感器越多,对赛道的检测则越精确,控制越灵活,但是,当传感器数量增多时,占用的单片机管脚增多,处理电路也增多,消耗的电量也越多。
因此,从实际应用的角度考虑,需合理选择传感器的数量。
另外,传感器的不同排列方式也会对赛道的检测有不同的作用。
循迹传感器采用的是灰度传感器,当传感器位于不同的位置(黑色引导线、白板)时,输出电压值不同,控制器通过对循迹传感器电压值的采样,获取道路信息。
2电机驱动智能汽车由直流电机提供动力,电机由车载直流电源供电,小车在运行过程中需要根据赛道设定合适的速度,即需要对电机速度进行控制。
因此,一般需要通过电机驱动电路向电机提供可以调节输出电压的电源,以控制小车的速度。
使用L298N电机驱动芯片:L298N硬件电路原理图L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
单片机应用——智能循迹小车设计
单片机应用——智能循迹小车设计智能循迹小车是一种基于单片机技术的智能机器人,它可以自动跟随线路进行行驶,具有很高的应用价值,被广泛地应用在工业控制和家庭娱乐等领域。
本次智能循迹小车的设计采用的是AT89C51单片机,通过巧妙的编程和外接传感器的配合来实现小车的自动识别和跟踪线路的功能。
下面我们来具体阐述一下智能循迹小车的设计过程。
一、硬件设计智能循迹小车的硬件系统包括电机驱动电路、传感器电路、控制板电路、电源电路等几个部分。
其中,电机驱动电路是实现小车行驶的关键,它通过外接减速电机来带动小车的轮子,从而实现前进、后退、转弯等基本动作。
传感器电路则用来检测小车当前所处的位置和前方的路况,从而将这些信息传递给单片机进行处理。
控制板电路是整个硬件系统的核心部分,它包括AT89C51单片机、EEPROM存储器、逻辑电路等。
其中,AT89C51单片机是控制整个系统的“大脑”,它通过编写相应的程序来实现小车的跟踪功能。
EEPROM存储器则用来保存程序和数据,以便实现数据的长期存储。
逻辑电路则用来实现各个硬件组件之间的协调工作,从而保证整个系统的正常运转。
二、软件设计软件设计是智能循迹小车系统中最为关键的一环,它直接决定了小车的行驶效果。
为了实现小车的自动跟踪功能,我们采用了双路反馈控制系统,并在此基础上进行了进一步优化和改进。
具体来说,我们先使用PID算法对传感器采集到的数据进行处理,得到当前位置和偏差值。
然后再通过控制电机的转速和方向,使小车能够自动跟随线路前进。
三、应用价值智能循迹小车是一种非常实用的机器人,它具有很高的应用价值。
例如,在农业生产中,可以利用智能循迹小车来进行田间作业,大大提高工作效率和质量;在家庭娱乐方面,智能循迹小车可以作为一种智能玩具,为人们带来更加丰富的娱乐体验。
四、总结通过本次智能循迹小车的设计,我们不仅深入了解了单片机及传感器的原理和应用,而且具备了一定的硬件和软件开发能力。
基于COMS摄像头的智能循迹车系统设计

瞢 通 PI D
25 } ຫໍສະໝຸດ 量2 0 :1 5 {
1o 5 0
1 oo0
2O0o
t i me ( s )
图 5智能车 P I D控制 的阶跃响应
2 0 1 5年 6月 下
2 3 5
1一
参 考文 献
[ 1 ] 卓睛 。 黄 开胜。 邵贝贝. 学做智能车: 挑战 “ 飞思卡尔”杯 [ M ] . 北京: 北京航 空航天 大学出版 社, 2 0 0 7 . [ 2 ] 李 国桂. 基于 C M O S摄像头的智能车路径跟踪系统设计 [ J ] 现 代电子技术, 2 0 1 1 , 3 4 ( 1 8 ) : 1 2 — 1 4 . [ 3 ] 刘鸣 , 张翰林 , 隆 昌宇. 基于 C M O S传感器 的智 能车赛道 自 动 寻迹 系统 [ J ] . 光机 电信息, 2 0 1 0 ,2 7 ( 1 0 ) : 5 9 - 6 2 . ‘ [ 4 ] 孙备 , 王烁. 王勇. 基于 C M O S摄像头 的寻迹智 能样 车的研 究与实现 [ J ] . 机 械制造, 2 0 1 3 。 5 1 ( 5 8 3 ) : 3 2 - 3 4 . [ 5 ] 李旭东 , 廖 中浩. 基于 C M O S摄像头的智能车控制系统设计 及 实现 [ J ] . 吉林 大学学报, 2 0 1 3 , 3 1 ( 4 ) : 4 1 4 - 4 1 8 . [ 6 ] 于少东 , 黄丹平, 田建平. 基于 K i n e t i S K 6 0的智能车控制 系统设 计[ J ] . 四川理工学院学报, 2 0 1 4 。 2 7 ( 5 ) : 3 7 — 4 2 . [ 7 ] 李鹏勃. 基于A R M的智能车控制系统开发研究 [ D ] . 兰州: 兰 州理 工大 学 , 2 0 1 3 . [ 8 ] 晏小刚. 基 于电磁 技术 的智 f  ̄ g d , 车运行控制的研究 [ J ] . 中山大学研 究生学刊, 2 0 1 3 , 3 4 ( 3 ) : 7 - 9 . 作 者简介 : 朱慕涵 ( 1 9 9 4 一) . 男, 江苏科技大学 电气与信息工程学院本 科在读 , 研究领域为 :检测与智 能控制 。
智能循迹小车总体设计方案

智能循迹小车总体设计方案1.1 整体设计方案本系统采用简单明了的设计方案。
通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的传感器循迹模块黑线路经,然后由AT89S52通过IO口控制L298N驱动模块改变两个直流电机的工作状态,最后实现小车循迹。
1.2系统设计步骤(1)根据设计要求,确定控制方案;(2)将各个模块进行组装并进行简单调试;(3)画出程序流程图,使用C语言进行编程;(4)将程序烧录到单片机内;(5)进行调试以实现控制功能。
1.2.1系统基本组成智能循迹小车主要由AT89S52单片机电路、循迹模块、L298N驱动模块、直流电机、小车底板、电源模块等组成。
(1)单片机电路:采用AT89S52芯片作为控制单元。
AT89S52单片机具有低成本、高性能、抗干扰能力强、超低功耗、低电磁干扰,并且与传统的8051单片机程序兼容,无需改变硬件,支持在系统编程技术。
使用ISP可不用编程器直接在PCB板上烧录程序,修改、调速都方便。
(2)循迹模块:采用脉冲调制反射红外发射接收器作为循迹传感器,调制信号带有交流分量,可减少外界的大量干扰。
信号采集部分就相当于智能循迹小车的眼睛,有它完成黑线识别并产生高、低平信号传送到控制单元,然后单片机生成指令来控制驱动模块来控制两个直流电机的工作状态,来完成自动循迹。
(3)L298N驱动模块:采用L298N作为点击驱动芯片。
L298N具有高电压、大电流、响应频率高的全桥驱动芯片,一片L298N可以分别控制两个直流电机,并且带有控制使能端。
该电机驱动芯片驱动能力强、操作方便、稳定性好,性能优良。
L298N的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。
另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。
智能循迹小车设计方案
智能循迹小车设计方案摘要本文介绍了智能循迹小车的设计方案。
智能循迹小车是一种能够根据预设的路径自动行驶的小车。
它可以通过传感器感知周围环境,并根据预设的路径进行行驶。
在本文中,我们将讨论智能循迹小车的系统设计、硬件实现以及软件算法。
1. 引言智能循迹小车是近年来智能交通领域的一个热门研究方向。
它可以应用于无人驾驶、物流配送等领域,具有广阔的应用前景。
本文将介绍智能循迹小车的设计方案,以供相关研究人员参考。
2. 系统设计智能循迹小车的系统设计由硬件和软件两部分组成。
2.1 硬件设计智能循迹小车的硬件设计主要包括以下几个方面:•电机驱动:智能循迹小车需要有强大的驱动力来行驶。
通常采用直流电机作为驱动装置,并配备电机驱动器。
•路径感知:智能循迹小车需要能够感知预设的路径。
通常使用红外线传感器或摄像头进行路径感知。
•避障功能:智能循迹小车还需要具备避障功能,以避免与障碍物发生碰撞。
通常使用超声波传感器或红外线传感器进行障碍物的检测。
•控制系统:智能循迹小车的控制系统通常采用微控制器或单片机进行控制。
它可以根据传感器的反馈信息,控制电机驱动器的转动。
2.2 软件设计智能循迹小车的软件设计主要包括以下几个方面:•路径规划算法:智能循迹小车需要能够根据预设的路径进行行驶。
路径规划算法会根据传感器感知到的环境信息,计算出最优的行驶路径。
•控制算法:智能循迹小车的控制算法会根据路径规划算法的结果,控制电机驱动器的转动。
它可以实现小车沿着路径稳定行驶,并及时调整行驶方向。
•避障算法:智能循迹小车的避障算法会根据传感器感知到的障碍物信息,判断是否需要进行避障操作。
它可以实时监测障碍物,并及时采取措施进行避让。
3. 硬件实现智能循迹小车的硬件实现通常需要进行电路设计和机械结构设计。
电路设计主要包括电机驱动电路、传感器接口电路以及控制系统电路的设计。
可以使用电路设计软件进行模拟和调试,确保电路的性能和稳定性。
机械结构设计主要包括车身设计、电机安装以及传感器安装等。
智能电动车寻迹系统设计
智能电动车寻迹系统设计摘要:此系统按要求利用MSP430单片机系列的F449芯片制作了一个简易智能电动车,采用红外线发送和接收器件构成的寻迹电路,再通过软件设计来实现智能小车的自动寻迹功能。
本系统实现的主要功能是:小车从起点出发,自动检测黑线位置,自动调整,沿引导线正确行驶。
关键词:智能电动车;自动寻迹;单片机MSP430的特点简单介绍:1、16位精简指令结构。
2、内含10,12,14位快速ADC/SLOP ADC。
3、内含FLASH ROM多致60K字节,多致2K RAM。
4、片内资源丰富,有ADC,PWM,若干TIME,串行口,WATCHDOG,比较器,模拟信号。
5、有多种省电模式,功耗特别省,一颗电池可工作10年,在液晶显示时也能达到0.8uA的低电源消耗。
6、开发简单,仿真器价格低廉,不需昂贵的编程器。
同其它微控制器相比,带Flash的微控制器可以将功耗降低5倍,既缩小了线路板空间又降低了系统成本。
高效16位RISCCPU可以确保任务的快速执行,缩短了工作时间。
大多数指令可在一个时钟周期里完成。
6微秒的快速启动时间可以延长待机时间并使启动更加迅速,降低了电池的功耗。
MSP430产品系列可以提供多种存储器选择,从14位ADCs到LCD驱动电路的混合信号外设,简化了各类应用中MSP430的设计。
ESD保护,抗干扰力特强。
1.8V-3.6V低电压供电。
外围电路的选择:1、传感器引导法这种方法核心是单片机通过对传感器信号检测来控制制动电机和电机转向的动作,智能化大大增强,可以用下图形象的表示出来:我们把任务分为了直道+ 弯道区、障碍区,划分依据是:两个部分所用到的感应器不同,实现方法也存在差别。
寻迹:直道+ 弯道区主要用黑白检测光电传感器。
避障:障碍区则是用到了红外传感器。
这种方案应用面更广,也更接近实用化,智能化。
重要的是单片机可以通过对感应器信号的检测来控制电机运作,从而大大提高了运行过程中的实时性,准确性、使得电动车能够轻松的完成整个过程。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的飞速发展,智能小车作为智能交通系统的重要组成部分,已经广泛应用于军事、工业、民用等多个领域。
自循迹智能小车控制系统的设计与实现,成为了智能化进程中一个关键环节。
本文旨在阐述自循迹智能小车控制系统的设计原理和实现过程,分析系统结构与功能,为相关研究与应用提供参考。
二、系统设计1. 硬件设计自循迹智能小车控制系统硬件主要包括:电机驱动模块、传感器模块、主控制器模块等。
其中,电机驱动模块负责驱动小车前进、后退、转向等动作;传感器模块包括红外传感器、超声波传感器等,用于检测小车周围环境及路径信息;主控制器模块采用高性能微控制器,负责协调各模块工作,实现小车的自主循迹。
2. 软件设计软件设计包括控制系统算法设计和程序编写。
控制系统算法主要包括路径识别算法、速度控制算法、避障算法等。
程序编写采用模块化设计思想,将系统功能划分为多个模块,如电机控制模块、传感器数据采集模块、路径识别与决策模块等。
各模块之间通过通信接口进行数据交换,实现小车的自主循迹。
三、实现过程1. 传感器数据采集与处理传感器模块负责采集小车周围环境及路径信息,包括红外传感器、超声波传感器等。
这些传感器将采集到的数据传输至主控制器模块,经过数据处理与分析,提取出有用的信息,如障碍物位置、路径边界等。
2. 路径识别与决策路径识别与决策模块根据传感器数据,判断小车当前位置及目标路径,并制定相应的行驶策略。
当小车偏离目标路径时,系统会自动调整行驶方向,使小车重新回到目标路径上。
此外,避障算法也在此模块中实现,当检测到障碍物时,系统会及时调整小车的行驶方向,避免与障碍物发生碰撞。
3. 电机控制与驱动电机控制与驱动模块根据主控制器的指令,控制电机的运转,实现小车的前进、后退、转向等动作。
通过调整电机的转速和转向,可以实现对小车速度和行驶方向的精确控制。
四、实验结果与分析通过实验测试,自循迹智能小车控制系统能够在不同环境下实现自主循迹和避障功能。
智能循迹机器人控制系统的设计

智能循迹机器人控制系统的设计发表时间:2018-06-15T09:57:45.530Z 来源:《电力设备》2018年第3期作者:张蕊段江薛晶[导读] 摘要:本设计是由AT89S52单片机系统来控制智能循迹机器人的行驶状态。
(国网陕西省电力公司培训中心陕西西安 710032)摘要:本设计是由AT89S52单片机系统来控制智能循迹机器人的行驶状态。
通过寻迹传感器进行黑线的检测,采用模块化的设计方案,由步进电机、传感模块、车轮模块、显示模块等组成,通过编译环境编程实现行进、绕障、停止、检测数据的存储、显示等功能,无需人工干预,实现智能循迹机器人的可自动寻迹行驶,具有较强的现实意义。
关键词:AT89S52单片机;寻迹传感器;步进电机;显示模块 1.引言随着社会发展,人类的公共交通需求逐渐增加,人工智能化水平的日益提升,智能机器人作为现代社会的新产物,是以后的发展方向[1-3]。
从系统硬件方面讲,智能机器人必须具有复杂的传感器,功能强大的计算机以及精确的驱动系统[4],它可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标;从系统软件方面讲,智能机器人是通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统[5]。
2.系统总体设计智能机器人使用AT89S52单片机作为主控芯片。
其主控系统设计框图如图1所示。
根据要求,确定如下方案:在现有模具车的基础上,加装光电检测器,实现对电动车的位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。
这种方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求。
系统设计包括的主要内容为:(1)主机控制电路设计,要能达到相应的参数指标及选型的合理性。
原理图的设计,各个模块的相互结合。
智能循迹小车设计方案
智能循迹小车设计方案智能循迹小车设计方案智能循迹小车是一种能够根据预设路径自主行驶的无人驾驶车辆。
本设计方案旨在实现一辆智能循迹小车的设计与制作。
一、方案需求:1. 路径规划与控制:根据预设的路径,小车能够准确、迅速地在指定道路上行驶,并能随时调整方向和速度。
2. 传感器控制与反馈:小车具备多种传感器,能够实时感知周围环境和道路状况,如通过红外线传感器检测道路上的障碍物。
3. 自主导航与避障能力:小车能够自主判断并决策前进、转弯或避让,确保安全行驶。
当感知到障碍物时,能及时做出反应避开障碍。
二、方案设计:1. 硬件设计:a. 小车平台:选择合适的小车底盘,具备稳定性和承重能力,大小和外观可以根据实际需求进行设计。
b. 传感器系统:包括红外线传感器、超声波传感器和摄像头等,用于感应周围环境和道路状况。
c. 控制系统:采用单片机或嵌入式控制器,以实现传感器数据的处理、决策和控制小车运动。
2. 软件设计:a. 路径规划与控制算法:通过编程实现路径规划算法,将预设路径转换为小车可以理解的指令,控制小车的运动和转向。
b. 感知与决策算法:根据传感器获取的数据,实时判断周围环境和道路状况,做出相应的决策,例如避开障碍物或调整行驶速度。
c. 系统界面设计:为方便操作和监测,设计一个人机交互界面,显示小车的状态信息和传感器数据。
三、方案实施:1. 硬件实施:根据设计要求选择合适的硬件部件,并将它们组装在一起,搭建小车平台和安装传感器。
确保传感器按照预期工作稳定。
2. 软件实施:使用合适的编程语言开发控制程序。
编写路径规划、感知与决策算法,并将其与硬件系统绑定在一起。
通过测试和调试确保程序的正常运行。
3. 功能测试:对小车进行现场测试,包括路径规划、感知与决策的功能、反应时间和精度等方面的测试。
根据测试结果进行优化和调整。
四、方案展望:1. 增加智能化功能:进一步发展智能循迹小车的功能,添加更多的传感器和算法,实现更高级的自主导航和避障能力。
智能循迹小车设计

智能循迹小车设计首先,智能循迹小车的核心是循迹传感器。
循迹传感器能够感知地面上的轨迹,并将这些信息传递给控制器。
循迹传感器通常采用光电传感器或红外传感器,可以检测地面上的白色或黑色轨迹。
当循迹传感器检测到黑色轨迹时,它们会产生一个电信号,控制器会根据这个信号来调整小车的行进方向。
其次,智能循迹小车需要搭载驱动器和控制器。
驱动器负责控制小车的电机,使其前进、后退或转向。
控制器则负责接收循迹传感器的信号,并根据信号来控制驱动器的行为。
控制器通常采用微控制器或单片机,它能够接收和处理传感器信息,并根据预设的算法做出决策。
例如,当传感器检测到左边的循迹轨迹时,控制器会向右转,使小车沿着轨迹行驶。
另外,智能循迹小车还可以配备其他传感器来增强其功能。
例如,可以搭载距离传感器或超声波传感器,用来检测前方的障碍物,以避免碰撞。
还可以搭载温度传感器或光线传感器等,用来检测环境的温度或光线强度。
这些传感器可以通过串口或其他接口连接到控制器,实现对小车的全方位感知。
此外,智能循迹小车还可以通过通信模块和其他设备进行远程控制和数据传输。
例如,可以搭载蓝牙模块或Wi-Fi模块,使用户可以通过手机或电脑控制小车的行动。
还可以搭载摄像头,实现对小车周围环境的实时监控。
通过数据传输,用户可以实时获取小车的运行状态和环境信息。
最后,关于智能循迹小车的实现方法,可以采用硬件设计和软件编程相结合的方式。
在硬件设计方面,需要选择合适的电机、驱动器和传感器,搭建电路板,并且进行电路连接和调试。
在软件编程方面,可以使用C语言或其他编程语言,根据控制策略来编写控制器的代码。
代码需要能够读取传感器信号,进行数据处理,并控制驱动器的行为。
综上所述,智能循迹小车是一种能够自动行驶的小车,它通过搭载循迹传感器和控制器,能够感知轨迹并调整行进方向。
除了循迹传感器,还可以搭载其他传感器和通信模块,增强小车的功能和控制方式。
实现智能循迹小车需要进行硬件设计和软件编程,并将它们相互配合来实现自动行驶和远程控制。
智能循迹车及其路径规划的设计

智能循迹车及其路径规划的设计本设计采用Arduino和STM32单片机最小系统,运用光电和运动姿态传感器,结合PID自动控制算法和A水路径规划算法,通过设计系统运行的总体框架,开发岀了一款在具有基本自主循迹功能的基础上,结合了路径规划能力的智能循迹车。
通过在竞赛中实际检验,本设计实现了在迷宫地图中的全场定位以及路径规划中的预设巡航行驶和最短路径行驶的功能,并达到了较佳的控制效果。
本设计方案亦可作为相关机器人竞赛项目的基础参考方案。
标签:智能循迹车;路径规划;A*算法;Arduino; STM32Abstract:This design adopts Arduino and STM32 single chip microcomputer minimum system, uses photoelectric and motion attitude sensor»combines PID automatic control algorithm and A* path planning algorithm, through the design of the overall framework of the system operation, and based on the basic autonomous tracking function, an intelligent tracking vehicle is developed, which combines the ability of path planning・ Through the actual test in the competition» this design realizes the full field positioning in the labyrinth map and the preset cruising and the shortest path driving in the path planning, and achieves the better control effect. This design scheme can also be used as the basic reference scheme of the related robot competition projects.Keywords: intelligent tracking vehicle; path planning; A* algorithm;Arduino; STM32引言在近年来的各类机器人比赛中,智能循迹车因其具有技术性、竞技性和创新性,而成为了一个热门项II。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能电动车寻迹系统设计
摘要
此系统按要求利用msp430单片机系列的f449芯片制作了一个简易智能电动车,采用红外线发送和接收器件构成的寻迹电路,再通过软件设计来实现智能小车的自动寻迹功能。
本系统实现的主要功能是:小车从起点出发,自动检测黑线位置,自动调整,沿引导线正确行驶。
关键词:智能电动车;自动寻迹;单片机
msp430的特点简单介绍:
1、16位精简指令结构。
2、内含10,12,14位快速adc/slop adc。
3、内含flash rom多致60k字节,多致2k ram。
4、片内资源丰富,有adc,pwm,若干time,串行口,watchdog,比较器,模拟信号。
5、有多种省电模式,功耗特别省,一颗电池可工作10年,在液晶显示时也能达到0.8ua的低电源消耗。
6、开发简单,仿真器价格低廉,不需昂贵的编程器。
同其它微控制器相比,带flash的微控制器可以将功耗降低5倍,既缩小了线路板空间又降低了系统成本。
高效16位risccpu可以确保任务的快速执行,缩短了工作时间。
大多数指令可在一个时钟周期里完成。
6微秒的快速启动时间可以延长待机时间并使启动更加迅速,降
低了电池的功耗。
msp430产品系列可以提供多种存储器选择,从14位adcs到lcd 驱动电路的混合信号外设,简化了各类应用中 msp430的设计。
esd保护,抗干扰力特强。
1.8v-3.6v低电压供电。
外围电路的选择:
1、传感器引导法
这种方法核心是单片机通过对传感器信号检测来控制制动电机和电机转向的动作,智能化大大增强,可以用下图形象的表示出来:我们把任务分为了直道 + 弯道区、障碍区,划分依据是:两个部分所用到的感应器不同,实现方法也存在差别。
寻迹:直道 + 弯道区主要用黑白检测光电传感器。
避障:障碍区则是用到了红外传感器。
这种方案应用面更广,也更接近实用化,智能化。
重要的是单片机可以通过对感应器信号的检测来控制电机运作,从而大大提高了运行过程中的实时性,准确性、使得电动车能够轻松的完成整个过程。
msp430f449片内已含有lcd驱动模块、ad转换模块、时钟模块。
因此,外围电路主要是设计寻迹、避障传感电路和直流电机驱动电路设计。
st178:单光束红外传感器。
2、红外探测法
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。
单片机就是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线。
红外探测器探测距离有限,一般最大不应超过15cm。
对于发射和接收红外线的红外探头,可以自己制作或直接采用集成式红外探头。
自制红外探头电路如(图1)所示,红外光的发送接收选用型号为st168的对管。
当小车在白色地面行驶时,装在车下的红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,那么图中光敏三极管将导通,比较器输出为低电平;当小车行驶到黑色引导线时,红外线信号被黑色吸收后,光敏三极管截止,比较器输出高电平,从而实现了通过红外线检测信号的功能。
将检测到的信号送到单片机i/o口,当i/o口检测到的信号为高电平时,表明红外光被地上的黑色引导线吸收了,表明小车处在黑色的引导线上;同理,当i/o口检测到的信号为低电平时,表明小车行驶在白色地面上。
此种方法简单,价格便宜,灵敏度可调,但是容易受到周围环境的影响,特别是在图1较强的日光灯下,对检测到的信号有一定的影响。
寻迹方案:
采用普通红外发射接收器件检测。
它包括一个可以发射红外光
的固态发光二极管和一个用作接收器的固态光敏二极管(或光敏三极管),再附以外围电路以消除背景光的干扰。
由于采用红外管代替普通可见光管,可以降低环境光源干扰。
控制方法的选择:
主电路采用可逆pwm—m的双极式h型电路。
运用4个c2655晶体管和4个续流二极管组成的桥式电路,靠晶体管导通和关闭的占空比d来实现电动机调速的目的,输出端的电位极性不同可以使电机正转和反转。
应用中应尽量提高斩波频率,减少电流的脉动。
1、电动车车体的选择
自制车体。
可以在车模店自己选购配件组装,或者自己加工。
优点是这种方法能够制作出完全适合自己设计意图的车体,缺点是需要较多时间和高水平的加工工艺。
将小车设计成三轮车,前面为两个主动轮,后面为一个从动轮。
主动轮又直流电机驱动,从动轮为普通的万向轮,无动力系统。
2、电动车动力方案选择
采用直流电机驱动。
可以采用双电机差速驱动,优点是动力好,速度快。
缺点是难于精密控制。
直流电机控制主要采用h桥电路,本课题中选择lm293专用驱动芯片。
结论
整个系统的设计是以单片机为核心,通过调试,本系统能实现如下功能:自动寻迹:小汽车在行驶过程中,应能自动检测引导黑
线行驶。
参考文献
[1] 刘刚,刘凤,于军. msp430单片机构成σ-△型ad转换器原理及实现方法[j]
[2] 李华.mcs-51实用接口技术[m]北京:北京航空航天大学出版社,199
[3] 陆坤等. 电子设计技术[m]. 成都:电子科技大学出版社,1998.10
[4] 黄俊,王兆安.电力电子技术(第三版)[m] 北京:机械工业出版社,1999.12
[5] 罗志增.机器人感觉与多信息融合[m].北京:机械工业出版社,2002,6
[6] 罗志增.简易红外接近觉传感器[c].全国青年第三届机器人学研讨会论文集,1990.
[7] 实用电工计算手册[m].上海:上海科学技术出版
社,1992,9.。