拓扑和最短路径
拓扑和最短路径
v2
v1
v4
v3
v1 v2 v3 v4
(a)表示偏序
(b)表示全序
图1 表示偏序和全序的有向图
实际问题:
一个表示偏序的有向图可用来表示一个流程图。它 或者是一个施工流程图,或者是一个产品生产的流程图 ,再或是一个数据流图(每个顶点表示一个过程)。图中 每一条有向边表示两个子工程之间的次序关系(领先关系 )。
一、边上权值非负情形的单源最短路径问题 问题描述:
给定带权有向图G和源点v,求从v到G中其余各顶 点的最短路径。限定各边上的权值大于或等于0。 具体实例分析:
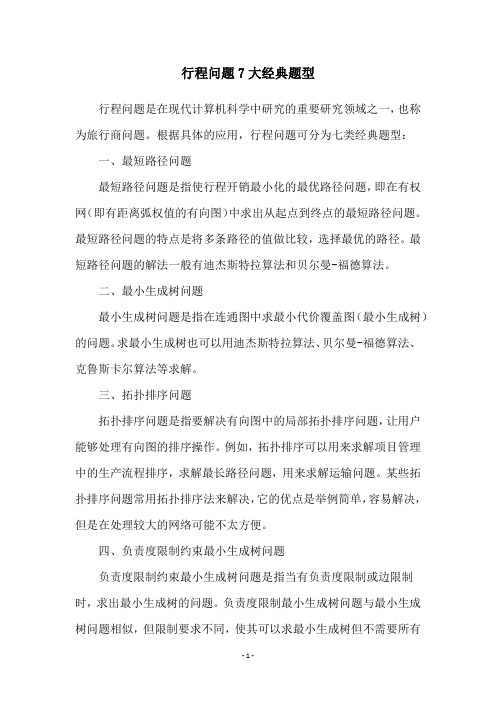
例如,图7.34所示带权有向图G中从v0到其余各 顶点之间的最短路径,如图7.35所示。
100 v5 60
v0
30
10
10
v1 5
5
v2 0
v6 - v1 - v4 - v3 - v2 - v5
v1 v2 v1 v2
v2
v2
v2
v4 v3 v4 v3 v4 v3
v3
v6 v5
v5
v5
v5
v5
v5
(a)
(b)
(c)
(d)
(e)
(f)
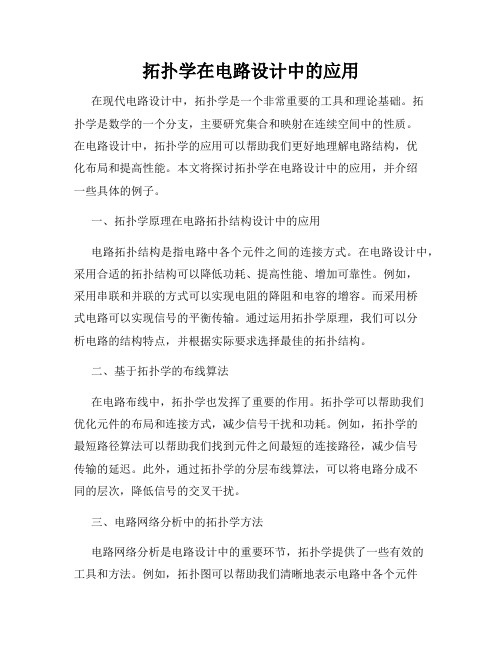
图7.28 AOV-网及其拓扑有序序列产生的过程
如何在计算机中实现?
针对上述两步操作,我们可采用邻接表作有向图 的存储结构,且在头结点中增加一个存放顶点入度的 数组(indegree)。入度为零的顶点即为没有前驱的顶点 ,删除顶点及以它为尾的弧的操作,则可换以弧头顶 点的入度减1来实现。
例如,一个软件专业的学生必须学习一系列基本课 程,其中有些课程是基础课,它独立于其它课程,如《 高等数学》;而另一些课程必须在学完作为它的基础的 先修课程才能开始。如在《程序设计基础》和《离散数 学》学完之前就不能开始学习《数据结构》。这些先决 条件定义了课程之间的领先(优先)关系。这个关系可以 用有向图更清楚地表示。图中顶点表示课程,有向边(弧 )表示先决条件。若课程i是课程j的先决条件,则图中有 弧<i,j>。
最短路径问题介绍

最短路径问题介绍全文共四篇示例,供读者参考第一篇示例:最短路径问题是指在一个带有边权的图中,寻找连接图中两个特定节点的最短路径的问题。
在实际生活中,最短路径问题广泛应用于交通运输、通信网络、物流配送等领域。
通过解决最短路径问题,可以使得资源的利用更加高效,节约时间和成本,提高运输效率,并且在紧急情况下可以迅速找到应急通道。
最短路径问题属于图论中的基础问题,通常通过图的表示方法可以简单地描述出这样一个问题。
图是由节点和边组成的集合,节点表示不同的位置或者对象,边表示节点之间的连接关系。
在最短路径问题中,每条边都有一个权重或者距离,表示从一个节点到另一个节点移动的代价。
最短路径即是在图中找到一条路径,使得该路径上的边权和最小。
在解决最短路径问题的过程中,存在着多种算法可以应用。
最著名的算法之一是Dijkstra算法,该算法由荷兰计算机科学家Edsger W. Dijkstra于1956年提出。
Dijkstra算法是一种贪心算法,用于解决单源最短路径问题,即从一个给定的起点到图中所有其他节点的最短路径。
该算法通过维护一个距离数组和一个集合来不断更新节点之间的最短距离,直到找到目标节点为止。
除了Dijkstra算法和Floyd-Warshall算法外,还有一些其他与最短路径问题相关的算法和技术。
例如A*算法是一种启发式搜索算法,结合了BFS和Dijkstra算法的特点,对图中的节点进行评估和排序,以加速搜索过程。
Bellman-Ford算法是一种解决含有负权边的最短路径问题的算法,通过多次迭代来找到最短路径。
一些基于图神经网络的深度学习方法也被应用于最短路径问题的解决中,可以获得更快速和精确的路径搜索结果。
在实际应用中,最短路径问题可以通过计算机程序来实现,利用各种算法和数据结构来求解。
利用图的邻接矩阵或者邻接表来表示图的连接关系,再结合Dijkstra或者Floyd-Warshall算法来计算最短路径。
地理信息系统中的路网模型构建与分析技巧
地理信息系统中的路网模型构建与分析技巧地理信息系统(Geographic Information System,简称GIS)是一种用于收集、存储、管理、分析和展示地理数据的技术工具。
在GIS中,路网模型是非常重要的模型之一,用于描述和分析交通网络中道路的连接关系、属性信息和流量情况。
本文将介绍在地理信息系统中构建和分析路网模型的一些技巧与方法。
1.数据准备在构建路网模型之前,首先需要收集道路和交通相关的数据。
比较常用的数据源包括政府机构、交通管理部门、地理信息提供商等。
这些数据主要包括道路图层、交通流量数据、道路等级和道路属性等信息。
确保数据的准确性和完整性对于路网模型的建立是至关重要的。
2.网络模型构建在GIS中,路网模型一般由节点(Node)和边(Edge)组成。
节点表示道路的连接点,边表示道路之间的连接关系。
构建路网模型的关键是将现实世界中的道路数据转化为GIS中的节点和边的数据结构。
常用的方法包括网格法(Grid-based)和道路缓冲区方法(Buffer-based)等。
网格法将道路数据网格化,每个网格的中心点作为节点,并根据道路之间的连通关系连接边。
道路缓冲区方法则是在道路数据周围创建缓冲区,节点为缓冲区的交叉点,并连接相邻缓冲区之间的边。
3.网络拓扑分析网络拓扑分析是对路网模型进行分析和查询的一种方法。
常用的网络拓扑分析包括最短路径分析、网络连通性分析和网络服务区分析等。
最短路径分析用于确定两点之间的最短路径,常用于交通导航、物流配送等领域。
网络连通性分析用于确定节点之间的连通关系,判断是否存在断路或者孤立节点等情况。
网络服务区分析用于确定某一服务点范围内的区域,常用于设施选址、服务配送等决策过程中。
4.交通流量分析路网模型可以整合交通流量数据,通过对交通流量进行分析,揭示交通网络的运行特征和路段的瓶颈问题。
交通流量数据可以从监测设备、移动终端数据或者其他数据源获取。
常用的交通流量分析包括路段流量分析、拥堵分析和交通需求研究等。
拓扑排序求最短路径
拓扑排序和最短路径是两个不同的图论问题,它们在解决实际应用问题时有着重要的应用。
首先,让我们解释一下拓扑排序,然后再来看如何用拓扑排序来解决最短路径问题。
拓扑排序:拓扑排序是用于有向无环图(Directed Acyclic Graph, DAG)的一种排序方式,通常用于对事件或活动的排序。
这种排序方法假设事件之间的依赖关系通过有向边表示,并且没有环路。
拓扑排序的结果是一个线性序列,其中每个节点都出现在其直接依赖节点之后。
拓扑排序在项目管理、调度和决策制定等领域有广泛应用。
最短路径问题:最短路径问题是图论中的一个经典问题,它要求找到图中两个节点之间的最短路径。
通常使用Dijkstra算法或Floyd-Warshall算法来解决这个问题。
最短路径问题在路径规划、网络路由和物流优化等领域有广泛应用。
如何用拓扑排序求最短路径:1. **确定拓扑排序**:首先,使用拓扑排序算法(如Kahn算法)对有向无环图进行排序。
这个排序将给出图中所有节点的线性顺序。
2. **计算最短路径**:基于拓扑排序的顺序,可以很容易地找到两个节点之间的最短路径。
如果节点i和节点j在拓扑排序中的位置分别为i和j,那么从i到j的最短路径长度就是图中从i到j的边的权重中较小的那个(如果存在的话)。
如果没有这样的边,那么两个节点之间没有直接路径,最短路径为无穷大。
这个方法的关键在于利用拓扑排序的线性特性,通过简单观察就可以找到最短路径。
**注意**:这个方法只适用于无环图(DAG)。
如果图中存在环路,拓扑排序就无法使用,需要使用其他方法(如Tarjan算法)来处理。
下面是一个简单的Python代码示例,展示了如何使用拓扑排序来找到两个节点之间的最短路径:```pythonfrom collections import defaultdict, dequedef topological_sort(graph):# 计算每个节点的入度并找出入度为0的节点作为起点in_degree = {node: 0 for node in graph}for node in graph:for neighbor in graph[node]:in_degree[neighbor] += 1return_nodes = [node for node in graph if in_degree[node] == 0]return return_nodes, [graph[node] for node in return_nodes]def shortest_path(graph, start, end):# 使用拓扑排序的结果来查找最短路径# 假设每个节点的入度为0的节点在结果列表中位于列表的开头queue = deque([start]) # 使用队列进行广度优先搜索visited = set() # 记录已访问的节点while queue:node = queue.popleft()if node == end: # 找到目标节点,返回路径长度和路径上的节点path_length = 0current = nodewhile current in visited: # 确保路径上的节点按顺序访问current = graph[current][0] # 获取下一个邻居节点path_length += 1visited.add(node) # 将已访问的节点添加到已访问集合中return path_length, current + [end] # 返回路径长度和完整路径(不包括起始节点)for neighbor in graph[node]: # 继续探索当前节点的邻居节点(下一个步长)if neighbor not in visited: # 如果邻居节点尚未访问过queue.append(neighbor) # 将邻居节点加入队列中以供下一步搜索return None, None # 如果找不到目标节点,返回None```以上代码使用了一个字典来表示图的结构,其中键是节点名称,值是一个包含相邻节点的列表。
实验一最短路径求解最短路径求解

实验一最短路径求解最短路径求解
实验一:最短路径求解
实验目的:利用Excel 线性规划求解最短思路。
实验环境:Microsoft Excel2003,Windows XP。
实验注意事项:
实验内容:使用线性规划计算机程序求解图1.1网络拓扑图中s
点到t 点间的最短路径。
图1.1 网络拓扑图
实验步骤:
1. 添加“规划求解”项,可通过“工具” “加载宏”加入该项
功能。
2. 将网络拓扑图转化成关联矩阵
A 矩阵表示各节点与各边相接的连接关系,若边e i 与节点v i
无关联则在此型式为0;若边e i 表示从节点v i 流出为1,若边e i 表示从节点v i 流入为-1。
列出各弧长向量W :
A 矩阵与向量W 出更可完整描述出数据流结构。
3. 根据Bellman 方程和约束条件进行求解
约束条件:若形成两点之间的最长路径,则起点s 必有一出路径,终点t 必有一入路径,其他中间节点必然一进有一进一出的路径。
Bellman 方程中Xi 向量为求解目标,Xi 代表此边是否在最短路
径上,如在最短路径上测度为1,若不在取值为0。
4. 使用Excel 线性规划求解,选择主菜单的“工具” “规划求解”即可进入“规划求解
参数”定义窗口;
其中目标单元格为Wi ×Xi ,可变单元格为Xi ,约束条件为Xi ≤1,且为整数;
AXi 表示向量值为Bellman 方程中所示(这里为方便求解,特将
s 点的AXs 值-1,将t 点的AXt 值+1,这样约束向量AXi=『0,0,0,0』)。
点击“求解”可得规划目标。
最短路径问题的求解
最短路径问题的求解
4、此时再以离原点最近的未展开的点B联接的所有点,处理后,再展开离原点最近未展开的D点, 处理后得到如下图的最终结果:
5、由上图可以得出结论:点C、B、D、E就是点A到它们的最短路径(注意:这些路径并不是经过了 所有点,而是只经过了其中的若干个点,而且到每一个点的那条路径不一定相同)。因而A到E的最 短距离就是13。至于它经过了哪几个点大家可在上述过程中加以记录即可。
最短路径问题的求解
三、等代价搜索法 等代价搜索法也是在宽度优先搜索的基础上进行了部分优化的一种算法,它与 启发式搜索的相似之处都是每次只展开某一个结点(不是展开所有结点),不同之 处在于:它不需要去另找专门的估价函数,而是以该结点到A点的距离作为估价值, 也就是说,等代价搜索法是启发式搜索的一种简化版本。它的大体思路是: 1、 从A点开始依次展开得到AB(7)、AC(3)、AD(10)、AE(15)四个新 结点,把第一层结点A标 把未展开过的AB、AC、AD、AE四个结点中距离最小的一个展开,即展开AC (3)结点,得到ACB(8)、ACD(16)、ACE(13)三个结点,并把结点AC标记为 已展开; 3、 再从未展开的所有结点中找出距离最小的一个展开,即展开AB(7)结点, 得到ABC(12)、ABD(20)、ABE(19)三个结点,并把结点AB标记为已展开; 4、 再次从未展开的所有结点中找出距离最小的一个展开,即展开ACB(8)结 点,……; 5、 每次展开所有未展开的结点中距离最小的那个结点,直到展开的新结点中 出现目标情况(结点含有5个字母)时,即得到了结果。
最短路径问题的求解
[问题分析] 对于一个含有n个顶点和e条边的图来说,从某一个顶点Vi到其余任一顶点Vj的最短路径,可 能是它们之间的边(Vi,Vj),也可能是经过k个中间顶点和k+1条边所形成的路径(1≤k≤n-2)。 下面给出解决这个问题的Dijkstra算法思想。 设图G用邻接矩阵的方式存储在GA中,GA[i,j]=maxint表示Vi,Vj是不关联的,否则为权值 (大于0的实数)。设集合S用来保存已求得最短路径的终点序号,初始时S=[Vi]表示只有源点, 以后每求出一个终点Vj,就把它加入到集合中并作为新考虑的中间顶点。设数组dist[1..n]用来 存储当前求得的最短路径,初始时Vi,Vj如果是关联的,则dist[j]等于权值,否则等于maxint, 以后随着新考虑的中间顶点越来越多,dist[j]可能越来越小。再设一个与dist对应的数组 path[1..n]用来存放当前最短路径的边,初始时为Vi到Vj的边,如果不存在边则为空。 执行时,先从S以外的顶点(即待求出最短路径的终点)所对应的dist数组元素中,找出其 值最小的元素(假设为dist[m]),该元素值就是从源点Vi到终点Vm的最短路径长度,对应的 path[m]中的顶点或边的序列即为最短路径。接着把Vm并入集合S中,然后以Vm作为新考虑的中 间顶点,对S以外的每个顶点Vj,比较dist[m]+GA[m,j]的dist[j]的大小,若前者小,表明加入 了新的中间顶点后可以得到更好的方案,即可求得更短的路径,则用它代替dist[j],同时把Vj 或边(Vm,Vj)并入到path[j]中。重复以上过程n-2次,即可在dist数组中得到从源点到其余 各终点的最段路径长度,对应的path数组中保存着相应的最段路径。 对于上图,采用Dijkstra算法找出C1到Ci之间的最短路径(2≤i≤6)的过程如下:
计算机网络原理 最短路径路由

计算机网络原理最短路径路由在路由选择方法中,我们经常采用的算法是:求给定网络中任意两个节点间的最短路径。
即求任意两个节点间的最小时延或最小费用的路径。
这里已知的是整个网络拓扑和各链路的长度。
求最短路径的方法有许多种,下面我们以图6-4所示的网络为例来讨论一种由Dijkstra 提出的求最短路径的算法,即寻找从源节点到网络中其他各节点的最短路径。
在本例中,设节点A为源节点,然后逐步寻找其最短路径,每次找一个节点到源节点的最短路径,直到把所有的点都找到为止。
图6-4 求最短路径算法的网络举例令D(V)为源节点(节点A)到节点v的距离,它就是沿着某一通路的所有链路的长度之和。
再令l(i,l)为节点i至节点j之间的距离。
整个算法有以下部分:(1)初始化。
令N表示网络节点的集合。
先令N={A},对所有不在N中的节点v,写出:λ(A,ν)若节点ν与节点A直接相连;D(ν)= {∞若节点ν与节点A不直接相连;在用计算机进行求解时,可以用一个比任何路径长度大得多的数值代替∞,可以使D (v)=99。
(2)寻找一个不在N中的节点w,其D(w)值为最小。
把w加入到N中,然后对所有不在N中的节点,用D(v)与[D(w)+λ(w,ν)]中较小的值去更新原有的D(v)值,即:D(v)←min[D(v),D(w)+λ(w,ν)](3)重得步骤(2),直到所有的网络节点都在N中为止。
6-2所示是对图6-4的网络进行求解的详细步骤。
可以看出,上述的步骤(2)共执行了5次,表中带圆圈的数字是在每一次执行步骤(2)时所寻找的具有最小值的D(w)值。
当第5次执行步骤(2)并得出了结果后,所有网络节点都已包含在N之中,整个算法即告结束。
最后就可得出以节点A 为根的最短路径树,如图6-5(1)所示。
从这个最短路径树可以清楚地看出从源节点A 到网内任何一个节点的最短路径。
图中,每个节点旁边括号中的数字表明该节点是在执行第几步的算法时加入到集合中去的。
基于GIS的城市路网拓扑关系的自动建立及最短路径分析
Ke r s: GI y wo d S;t po o ia e a i o l g c lr l ton;p t n l i ;u b n t a fc a h a a yss r a r fi
利用 GI S技 术 基 于 道 路 网络 的路 径 分 析 与 优
维普资讯
新 疆 农 业 大 学 学 报
2 0 ,0 2 :7 O 0 7 3 ( ) 7 ~8
J u n l f Xija gAg i l r l nvri o r a n in rc t a ies y o u u U t
文 章 编 号 :1 0 — 6 4 2 0 ) 20 7 —4 0 78 1 ( 0 7 0 — 0 70
r d ne wo k. e de i n ofau oma i h i cs i n a d e r r ha di g a ou r s o r p n o d ne — oa t r Th s g t tc c a n s i so n r o n n b tc o s ve oi tofr a t wo k wa omplt d. e e r sc e e Th r by, hea o a i o t uc i n oft po o c ls r t r o iy r d n t r n t ut m tc c ns r to o l gia t uc u ef rct oa e wo k a d t e r h o hes o t s ou e we e a hive a e S ( a n o) Th iy r d ne wo k wa e iid he s a c ft h r e tr t r c e d b s d on GI M pl f . e ct oa t r s v rfe
计算机网络中的数据传输与路由原理

计算机网络中的数据传输与路由原理计算机网络是现代社会不可或缺的重要组成部分,而数据传输与路由作为网络通信的核心原理,对网络的高效运行起着至关重要的作用。
本文将介绍计算机网络数据传输与路由的基本原理和相关技术。
一、数据传输的基本过程数据传输是计算机网络中信息交流的基本方式之一,其过程大致可以分为三个阶段:发送端、传输介质和接收端。
1. 发送端:在数据传输过程中,发送端负责将待传输的数据进行封装和编码。
首先,数据会被分割成更小的数据包或帧,每个数据包包含了一部分待传输的信息和必要的控制信息,例如源地址、目的地址、校验和等。
编码操作可以将数字信号转化为适合传输的模拟信号或数字信号。
2. 传输介质:数据在网络中通过传输介质进行传输。
根据网络规模和需求的不同,传输介质可以是以太网、光纤、无线电波等。
通过这些传输介质,数据可以在网络中以电信号、光信号等形式进行传输。
3. 接收端:接收端接收到传输的数据后,会进行解码操作,将模拟信号或数字信号转化为计算机可以处理的二进制数据。
然后,接收端会对数据进行还原和处理,提取出有效的信息,并将其传递给上层的应用程序或其他网络设备。
二、路由的基本原理与分类路由是指在计算机网络中选择数据传输的路径的过程。
路由器是网络中负责转发数据包的关键设备,其通过借助路由表和路由协议来决定数据传输的路径。
1. 静态路由:静态路由是通过手动配置路由表来确定数据传输的路径。
网络管理员根据网络拓扑和需求,手动设置路由器的路由表。
静态路由的优点是配置简单、效率高、安全性好,但不适应网络拓扑和拓展性的变化。
2. 动态路由:动态路由是通过路由协议自动学习和更新路由表,以适应网络拓扑和拓展性的变化。
常用的动态路由协议有RIP(Routing Information Protocol)、OSPF(Open Shortest Path First)、BGP (Border Gateway Protocol)等。
使用图论解决实际网络问题
使用图论解决实际网络问题图论作为数学的一个分支,广泛应用于解决实际网络问题。
在现代社会中,网络问题无处不在,如社交网络、电信网络、交通网络等,而图论可以帮助我们分析和优化这些网络。
本文将介绍如何使用图论解决实际网络问题,包括网络拓扑分析、最短路径问题、网络流问题等。
一、网络拓扑分析在网络拓扑分析中,我们通常使用图来表示网络结构。
图由节点(顶点)和边组成,节点表示网络中的元素,边表示节点之间的连接关系。
通过构建网络拓扑图,我们可以分析网络的结构特征,如节点的度、连通性等。
以社交网络为例,我们可以将每个用户看作一个节点,用户之间的关系(如好友关系)看作边。
通过分析社交网络的拓扑结构,我们可以发现影响信息传播和社交影响力的关键节点,从而优化社交网络的管理策略。
二、最短路径问题最短路径问题是图论中的经典问题之一,通常用于求解两个节点之间的最短路径。
在实际网络中,最短路径问题经常出现在路由规划、物流配送等场景中。
通过使用最短路径算法(如Dijkstra算法、Floyd-Warshall算法),我们可以快速找到网络中任意两个节点之间的最短路径。
这有助于优化网络通信的效率,减少通信成本,提高网络的可靠性。
三、网络流问题网络流问题是指在网络中寻找最大流量或最小成本的问题。
在实际网络中,网络流问题常常出现在电力调度、交通规划等领域。
通过建立网络流模型,我们可以分析网络中的流量分配情况,优化资源利用效率。
例如,在交通规划中,我们可以通过网络流算法优化交通信号灯的配时方案,减少交通拥堵,提高道路通行效率。
四、应用案例以电信网络优化为例,运营商需要合理规划网络结构,提高网络覆盖率和通信质量。
通过图论分析,可以确定最佳的基站布局方案,优化信号覆盖范围,提高用户体验。
另外,图论还可以应用于无线传感网络中的能量优化问题。
通过最小生成树算法等方法,可以有效减少传感器节点之间的通信能耗,延长网络寿命。
总结图论作为一种强大的工具,可以帮助我们解决各种实际网络问题。
OSPF协议通过LSA描述网络拓扑

OSPF协议通过LSA描述网络拓扑开放最短路径优先(Open Shortest Path First,简称OSPF)是一种常用的路由协议,用于在IP网络中进行动态路由选择。
OSPF协议通过链路状态广播(Link State Advertisement,简称LSA)来描述网络拓扑,帮助路由器之间建立并维护路由表。
LSA是OSPF协议中用于描述路由器感知到的网络拓扑的一种数据结构,每个LSA记录了一个路由器对网络邻居和连接的详细信息。
通过传播LSA,路由器可以了解整个网络的拓扑,进而进行路由计算和选择最佳路径。
在OSPF协议中,每个路由器负责在其周围的子网上发送Hello报文,以发现邻居路由器。
当邻居路由器被发现时,它们会通过交换Hello报文确认相互之间的链接。
接下来,邻居路由器交换LSA,共享其了解的网络信息。
每个路由器使用这些接收到的LSA来建立和维护路由表。
LSA可以分为不同类型,每种类型的LSA都描述了不同的网络信息。
其中一些常见类型的LSA包括:1.类型1LSA:也称为路由器LSA,用于描述源路由器及其连接的子网情况。
2.类型2LSA:也称为网络LSA,用于描述与多个路由器相连的多点链路的情况。
3.类型3LSA:也称为网络汇总LSA,用于描述一个AS(自治系统)中的网络路由信息。
4.类型4LSA:也称为AS外部汇总LSA,用于描述其他AS中网络的汇总信息。
5.类型5LSA:也称为外部LSA,用于描述到达其他AS的路由信息。
当路由器收到LSA时,它会检查其LSA数据库中是否已经存在该LSA。
如果数据库中不存在该LSA,路由器会将其存储在数据库中,并通过链路状态数据库同步协议(Link State Database Synchronization Protocol,简称LSDB sync)将其传播给其他邻居路由器。
这样,整个网络中的每个路由器都可以了解到该LSA。
利用收集到的LSA,每个路由器可以计算出到达目的地的最短路径。
拓扑学在电路设计中的应用
拓扑学在电路设计中的应用在现代电路设计中,拓扑学是一个非常重要的工具和理论基础。
拓扑学是数学的一个分支,主要研究集合和映射在连续空间中的性质。
在电路设计中,拓扑学的应用可以帮助我们更好地理解电路结构,优化布局和提高性能。
本文将探讨拓扑学在电路设计中的应用,并介绍一些具体的例子。
一、拓扑学原理在电路拓扑结构设计中的应用电路拓扑结构是指电路中各个元件之间的连接方式。
在电路设计中,采用合适的拓扑结构可以降低功耗、提高性能、增加可靠性。
例如,采用串联和并联的方式可以实现电阻的降阻和电容的增容。
而采用桥式电路可以实现信号的平衡传输。
通过运用拓扑学原理,我们可以分析电路的结构特点,并根据实际要求选择最佳的拓扑结构。
二、基于拓扑学的布线算法在电路布线中,拓扑学也发挥了重要的作用。
拓扑学可以帮助我们优化元件的布局和连接方式,减少信号干扰和功耗。
例如,拓扑学的最短路径算法可以帮助我们找到元件之间最短的连接路径,减少信号传输的延迟。
此外,通过拓扑学的分层布线算法,可以将电路分成不同的层次,降低信号的交叉干扰。
三、电路网络分析中的拓扑学方法电路网络分析是电路设计中的重要环节,拓扑学提供了一些有效的工具和方法。
例如,拓扑图可以帮助我们清晰地表示电路中各个元件之间的连接关系,方便进行分析和计算。
此外,通过应用拓扑学的图论方法,可以进行电路的边界条件分析、电压电流分布分析等,从而提高电路设计的精度和可靠性。
四、几个拓扑学在电路设计中的实际应用案例1. 拓扑绝缘体:拓扑绝缘体是一类具有特殊拓扑结构的材料,在电子学领域有着广泛的应用。
拓扑绝缘体的特殊拓扑结构可以实现电子的无散射传输,具有较高的导电性和抗干扰性能,可应用于高速电路和通信设备。
2. 拓扑优化:拓扑优化是一种通过对电路结构进行优化设计,实现最佳性能和可靠性的方法。
通过拓扑优化的方法,可以实现电路结构的局部调整和整体改进,提高电路的工作效率和稳定性。
3. 拓扑滤波器:拓扑滤波器是一种通过电路结构和拓扑学原理实现滤波功能的装置。
测绘中的拓扑是什么意思

测绘中的拓扑是什么意思
拓扑本来是一个数学概念,在GIS技术中,是特指对电子地图中点、线、面等等要素之间关系的一种描述,比如通过拓扑关系可以找到两个临近的多边形(地块),还可以通过拓扑关系找到两地之间的最短路径(线段链接)等等。
拓扑概念是GIS技术的重要基本概念之一。
拓扑关系是在语义层次上最重要的一种空间关系,拓扑推理的研究主要有两类基本的方法:基于区域连接的RCC方法和基于点集的“n-交集”模型。
GIS空间推理的关键问题是如何利用存贮在数据库中的基本数据信息并结合相关的空间约束来获取所需的未知空间信息。
而对拓扑关系的推理,是GIS空间推理、查询与分析的基础,直接影响GIS的发展与应用。
结合人类的认知模式,并结合时空、模糊、层次等拓扑关系来进行GIS的空间推理,使模型的描述方式更符合人们对拓扑信息的表达和认知方式,并走向网络化和大众化,是空间拓扑推理的发展趋势。
行程问题7大经典题型
行程问题7大经典题型行程问题是在现代计算机科学中研究的重要研究领域之一,也称为旅行商问题。
根据具体的应用,行程问题可分为七类经典题型:一、最短路径问题最短路径问题是指使行程开销最小化的最优路径问题,即在有权网(即有距离弧权值的有向图)中求出从起点到终点的最短路径问题。
最短路径问题的特点是将多条路径的值做比较,选择最优的路径。
最短路径问题的解法一般有迪杰斯特拉算法和贝尔曼-福德算法。
二、最小生成树问题最小生成树问题是指在连通图中求最小代价覆盖图(最小生成树)的问题。
求最小生成树也可以用迪杰斯特拉算法、贝尔曼-福德算法、克鲁斯卡尔算法等求解。
三、拓扑排序问题拓扑排序问题是指要解决有向图中的局部拓扑排序问题,让用户能够处理有向图的排序操作。
例如,拓扑排序可以用来求解项目管理中的生产流程排序,求解最长路径问题,用来求解运输问题。
某些拓扑排序问题常用拓扑排序法来解决,它的优点是举例简单,容易解决,但是在处理较大的网络可能不太方便。
四、负责度限制约束最小生成树问题负责度限制约束最小生成树问题是指当有负责度限制或边限制时,求出最小生成树的问题。
负责度限制最小生成树问题与最小生成树问题相似,但限制要求不同,使其可以求最小生成树但不需要所有节点出现。
解决负责度限制最小生成树问题的常见算法有Prim,Kruskal算法,单源最短路径算法等。
五、旅行商问题旅行商问题是指将一个实体从一个位置出发,访问所有位置,最后返回原位置,要尽可能使得整个行程之和最小的问题。
旅行商问题与最短路径问题之间存在着一定的联系,但是它更加复杂,可能有多个路径都是最优的,旅行商问题最优解的求解方法有穷举法、贪心法、遗传算法等。
六、交通网络问题交通网络问题是指涉及多晶体的旅行问题,在该问题中,客户的行程将跨越多个晶体构成的网络,以最小的费用或最短的时间从起点到终点运输物品或人员。
交通网络问题可以使用模拟退火法、遗传算法、混合算法等解决。
七、联通子图覆盖问题联通子图覆盖问题是指求解一个图G是否存在一个联通子图T,满足T中所有顶点和G中的全部顶点是相同的,最小顶点覆盖问题是联通子图覆盖问题的一个特殊情况,该问题的解法一般有贪心法和回溯法。
详解图的应用(最小生成树、拓扑排序、关键路径、最短路径)
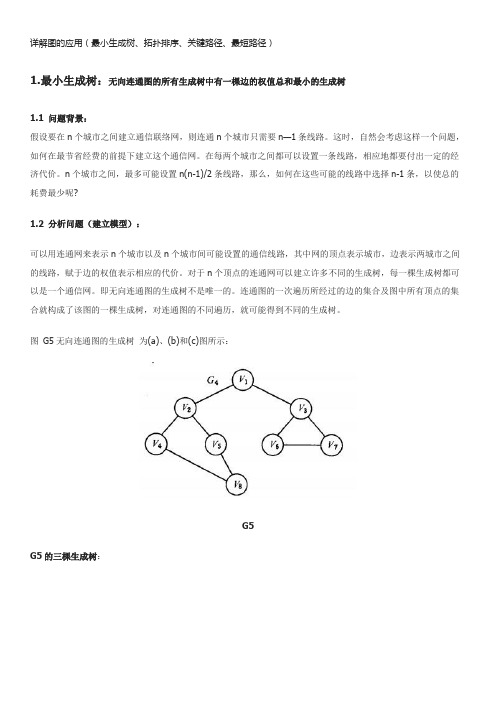
详解图的应用(最小生成树、拓扑排序、关键路径、最短路径)1.最小生成树:无向连通图的所有生成树中有一棵边的权值总和最小的生成树1.1 问题背景:假设要在n个城市之间建立通信联络网,则连通n个城市只需要n—1条线路。
这时,自然会考虑这样一个问题,如何在最节省经费的前提下建立这个通信网。
在每两个城市之间都可以设置一条线路,相应地都要付出一定的经济代价。
n个城市之间,最多可能设置n(n-1)/2条线路,那么,如何在这些可能的线路中选择n-1条,以使总的耗费最少呢?1.2 分析问题(建立模型):可以用连通网来表示n个城市以及n个城市间可能设置的通信线路,其中网的顶点表示城市,边表示两城市之间的线路,赋于边的权值表示相应的代价。
对于n个顶点的连通网可以建立许多不同的生成树,每一棵生成树都可以是一个通信网。
即无向连通图的生成树不是唯一的。
连通图的一次遍历所经过的边的集合及图中所有顶点的集合就构成了该图的一棵生成树,对连通图的不同遍历,就可能得到不同的生成树。
图G5无向连通图的生成树为(a)、(b)和(c)图所示:G5G5的三棵生成树:可以证明,对于有n 个顶点的无向连通图,无论其生成树的形态如何,所有生成树中都有且仅有n-1 条边。
1.3最小生成树的定义:如果无向连通图是一个网,那么,它的所有生成树中必有一棵边的权值总和最小的生成树,我们称这棵生成树为最小生成树,简称为最小生成树。
最小生成树的性质:假设N=(V,{ E}) 是个连通网,U是顶点集合V的一个非空子集,若(u,v)是个一条具有最小权值(代价)的边,其中,则必存在一棵包含边(u,v)的最小生成树。
1.4 解决方案:两种常用的构造最小生成树的算法:普里姆(Prim)和克鲁斯卡尔(Kruskal)。
他们都利用了最小生成树的性质1.普里姆(Prim)算法:有线到点,适合边稠密。
时间复杂度O(N^2)假设G=(V,E)为连通图,其中V 为网图中所有顶点的集合,E 为网图中所有带权边的集合。
计算机网络中的网络拓扑优化算法

计算机网络中的网络拓扑优化算法网络拓扑优化算法在计算机网络中起着至关重要的作用。
网络拓扑是指网络中各个节点之间连接的结构,而网络拓扑优化算法则是为了提高网络性能、减少传输延迟和提高带宽利用率而设计的一类算法。
本文将介绍一些常见的网络拓扑优化算法,并分析它们的原理和应用。
1. 最小生成树算法最小生成树算法是指在一个连通图中,找出连接节点的最短路径的算法。
在网络拓扑中,也可以通过最小生成树算法来优化网络结构。
例如,Prim算法和Kruskal算法都可以用来构建最小生成树。
Prim算法是一种贪心算法,它从图中的一个节点开始,逐渐扩展最小生成树,直到包含所有节点。
算法的核心思想是每次选择与当前生成树距离最近的节点,直到所有节点都被纳入生成树中。
Kruskal算法则是一种基于边的算法,它按照边的权值从小到大的顺序选择边,当选中的边不构成环时,纳入生成树中。
这两种算法在网络拓扑中的应用可以帮助我们找到较短的路径,优化网络传输。
2. 路由算法路由算法是计算机网络中常见的一种拓扑优化算法。
它决定了数据包从源节点到目标节点的传输路径。
常见的路由算法有距离矢量路由算法和链路状态路由算法。
距离矢量路由算法(Distance Vector Routing)也称为Bellman-Ford 算法,它采用迭代的方式来找到最短路径。
每个节点维护一个距离向量表,表中记录了从该节点到其他节点的最短距离。
链路状态路由算法(Link State Routing)则采用全局信息来计算最短路径。
每个节点都会广播自己的连接状态信息给整个网络,然后通过Dijkstra算法计算出最短路径。
路由算法在网络中起到了决定性的作用,不仅可以优化网络拓扑结构,还可以根据网络状况实时调整传输路径,提高网络的性能和稳定性。
3. 负载均衡算法负载均衡算法是一种用来分配网络流量的拓扑优化算法,它可以将网络流量均匀地分配到多个服务器或节点上,以达到提高带宽利用率和减少单个节点负载的目的。
动态拓扑网络最短路径启发式算法
( 浙江海洋学院数理与信息学 院 浙江 舟山 36 0 104)
摘
要
针对动态拓扑 网络 的最优路径规划中存在 的问题 , 究 了最 短路径搜 索算法 的快速 实现技术 , 出了一种启发式快速最 研 提
优路径规划算法 。在分析经典迪杰斯特拉最短路径搜 索算法和 A 启 发式搜 索算法 的基 础上 , 利用椭 圆 曲线参 数设定启发 函数初
始值 , 进一步缩小搜索范 围。采用 二叉堆结构来实现路径 计算过程 中优先级 队列的一系列操作 , 而提 高 了算法 的执行效率。仿真 从
试验结果表 明该 算法具有 良好 的性能。 关键词 最短路径 A 算 法 二叉堆 动态拓扑
A HEURI STI S C HoRTEST PATH ALGo RI THM N I DYNAM I ToPoLoGY C NETW oRK
率 。定义节 点的启发式估 价 函数 为f ) =g ( ( ) + h ), ( , ( 是假设是从起 始节 点 S出发 , 过节 点 到 达 目标 节点 ) 经 的最小代价值估计值 。估 价函数 f( )由 以下 两部 分所组成 :
一
在求最短路径的方法 中, 目前 国内外 一致公认较好 的算法
lto e ut h w t a h efr n e o h lo t m i s t f co y ai n r s l S o h t e p r ma c ft e ag r h s ai a t r . s t o i s
Ke ywor s d S re tp t A ag rt m Bia y h a Dy a c tp l g hot s ah lo h i n r e p n mi o o o y
J n uu W u W ezi i gYo f a i h
sw拓扑算例
sw拓扑算例【最新版】目录1.SW 拓扑算例的概述2.SW 拓扑算例的算法原理3.SW 拓扑算例的具体操作步骤4.SW 拓扑算例的应用领域5.SW 拓扑算例的优缺点分析正文一、SW 拓扑算例的概述SW 拓扑算例,全称为 Shortest Path Topological Algorithm,即最短路径拓扑算法,是一种基于图论的算法。
主要用于计算网络中各个节点之间的最短路径,适用于网络分析、数据传输、物流运输等多个领域。
二、SW 拓扑算例的算法原理SW 拓扑算例的算法原理基于 Dijkstra 算法和 Floyd 算法,主要通过计算网络中各个节点之间的最短路径,实现网络的优化。
其算法步骤主要包括初始化源节点、计算相邻节点距离、更新最短路径、判断是否收敛等。
三、SW 拓扑算例的具体操作步骤1.初始化源节点,即确定一个起始节点,用于计算其他节点的最短路径。
2.计算相邻节点距离,即计算源节点与其他节点之间的距离,将距离值存入邻接矩阵中。
3.更新最短路径,即在邻接矩阵中标记出源节点到其他节点的最短路径。
4.判断是否收敛,如果源节点到其他所有节点的最短路径都已确定,则算法结束;否则,回到第二步继续计算。
四、SW 拓扑算例的应用领域SW 拓扑算例广泛应用于网络分析、数据传输、物流运输等领域。
例如,在物流运输中,可以通过 SW 拓扑算例计算出货物从起点到终点的最短路径,从而降低运输成本和时间。
五、SW 拓扑算例的优缺点分析优点:1.计算速度快,适用于大规模网络;2.可以计算出最短路径,有助于优化网络结构;3.算法原理成熟,有较强的理论依据。
最短路径的概念

最短路径是指在图或网络中,从一个起始节点到达目标节点所经过的路径中,路径长度最短的那条路径。
最短路径可以应用于多种领域,如网络路由、物流配送、路径规划等。
在图论中,最短路径算法用于寻找两个节点之间的最短路径,其中最常用的算法是迪杰斯特拉算法和弗洛伊德算法。
迪杰斯特拉算法适用于求解单源最短路径问题,即从一个固定的起始节点到图中所有其他节点的最短路径。
该算法使用了贪心策略,通过逐步扩展已经找到的最短路径集合,不断更新节点的最短路径和距离信息,直到找到所有节点的最短路径。
弗洛伊德算法适用于求解任意两个节点之间的最短路径问题,即多源最短路径问题。
该算法采用动态规划的思想,通过逐步迭代更新节点之间的最短路径信息,直到得到所有节点之间的最短路径。
最短路径算法的应用范围广泛,可以帮助优化路径选择,减少时间和成本的消耗。
在实际应用中,还可以考虑其他因素,如边权重、节点权重、拓扑结构等,以满足具体问题的需求。
地铁最短路径算法

地铁最短路径算法
地铁最短路径算法是一种寻找地铁站之间最短路径的算法。
它采用了图论中的最短路
径算法,在地铁线路图中寻找两个站点之间的最短路径。
地铁最短路径算法的实现需要以下几个步骤:
1. 构建地铁站点之间的拓扑关系,即将地铁站点连接成一张图。
这张图包括了所有
的地铁站点以及它们之间的连接关系,连接关系可以理解为两个站点之间的直接地铁线路,也可以是换乘线路等其他关系。
2. 将图中的每个站点都标记为未访问。
接着将起点站点标记为已访问,并将起点站
点的路径长度设为0。
3. 对于所有与起点站点直接相连的站点,计算它们的路径长度,并将它们加入到一
个候选列表中。
4. 从候选列表中选出路径长度最短的一个站点,并将其标记为已访问。
如果这个站
点已经是终点站点,则算法结束。
6. 重复第四步和第五步直到终点站点被访问到。
地铁最短路径算法实现的关键在于如何计算两个站点之间的路径长度。
一般来说,可
以采用Dijkstra算法或Bellman-Ford算法来计算最短路径。
这些算法都是基于图论的算法,可以有效地处理复杂图形结构中的最短路径问题。
在实际应用中,地铁最短路径算法可以帮助人们规划地铁出行路线,节省时间和精力。
此外,该算法还可以被运用到其他的路径规划问题中,例如出租车路径规划、货物配送路
径规划等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
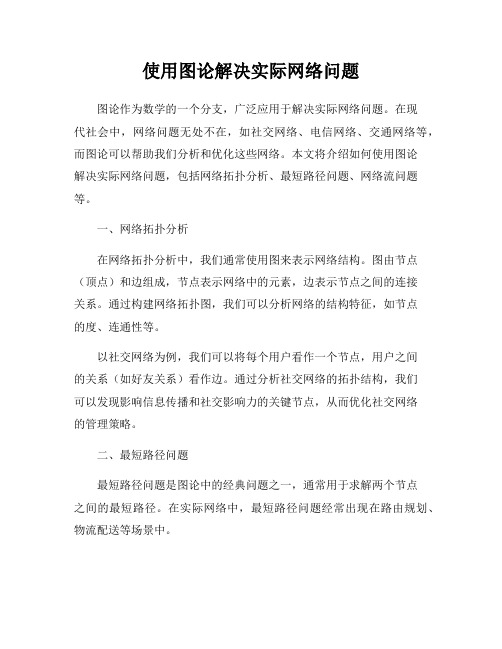
直观地看,偏序指集合中仅有部分成员之间可比 较,而全序指集合中全体成员之间均可比较。例如, 图所示的两个有向图,图中弧(x,y)表示x≤y,则(a)表示 偏序,(b)表示全序。若在(a)的有向图上人为地加一个 表示v2≤v3的弧(符号“≤”表示v2领先于v3),则(a)表 示的亦为全序,且这个全序称为拓扑有序(Topological Order),而由偏序定义得到拓扑有序的操作便是拓扑 排序。
printf(i,G.vertices[i].data); ++count; //输出i号顶点并计数 for(p=G.vertices[i].firstarc;p; p=p->nextarc) { k=p->adivex; //对i号顶点的每个邻接点的入度减1 if(!(--indegree[k])) Push(S,k);//若入度减为0,则入栈 }//for }//while if(count<G.vexnum) return ERROR;//该有向图有回路 else return OK; }//TopologicalSort
最短路径 无 (v0,v2) (v0,v4,v3) (v0,v4) (v0,v4,v3,v5)
路径长度 10 50 30 60
v0
10
10 5 50
20
v1
v3
v2
图 7.34
图7.35
迪杰斯特拉算法: 迪杰斯特拉(Dijkstra)提出了一个按路径长度递增 的次序,逐步产生最短路径的算法。首先求出长度最短 的一条最路径,然后参照它求出长度次短的一条最短路 径,依次类推,直到从顶点v到其它各顶点的最短路径 全部求出为止。 具体做法: 设集合S中存放已经求出的最短路径的终点,初始 状态时,集合S中只有一个源点,不妨设为v0。以后每 求得一条最短路径(v0,…,vk),就将vk加到集合S中,直 到全部顶点都加入到集合S中,算法就可以结束了。
有时,对于旅客来说,可能更关心的是节省交通 费用;而对于司机来说,里程和速度则是他们感兴趣的 信息。为了在图上表示有关信息,可对边赋以权,权的 值表示两城市间的距离,或途中所需时间,或交通费用 等等。此时路径长度的度量就不再是路径上边的数目, 而是路径上边的权值之和。 考虑到交通图的有向性(如航运,逆水和顺水时的 船速就不一样),本节将讨论带权有向图,并称路径上 的第一个顶点为源点(Sourse),最后一个顶点为终点 (Destination)。下面讨论两种最常见的最短路径问题。 (所谓最短路径问题是指:如果从图中某一顶点(称为 源点)出发到达另一顶点(称为终点)的路径可能不止 一条,如何找到一条路径使得沿此路径上各边的权值总 和达到最小。)
注意: 在AOV-网中不应该出现有向环,因为存在环意味着某项活动 应以自己为先决条件。若设计出这样的流程图,工程便无法进行。 而对程序的数据流图来说,则表明存在一个死循环。因此,对给 定的 AOV-网应首先判定网中是否存在环。检测的办法是对有向 图构造其顶点的拓扑有序序列,若网中所有顶点都在它的拓扑有 序序列中,则该AOV-网中必定不存在环。
v1 v4 v2 v3 v1 v4 (b) v2 v3 v5 (c) v4 v2 v3 v5 v2 v3 v5 (d) v5 (e) v5 (f) v2
v6 v5 (a)
图7.28 AOV-网及其拓扑有序序列产生的过程
如何在计算机中实现? 针对上述两步操作,我们可采用邻接表作有向图 的存储结构,且在头结点中增加一个存放顶点入度的 数组(indegree)。入度为零的顶点即为没有前驱的顶点, 删除顶点及以它为尾的弧的操作,则可换以弧头顶点 的入度减1来实现。 为了避免重复检测入度为零的顶点,可另设一栈 暂存所有入度为零的顶点,由此可得拓扑排序的算法。
v2 v1 v3 v4 v1 v2 v3 v4
(a)表示偏序 (b)表示全序 图1 表示偏序和全序的有向图
实际问题: 一个表示偏序的有向图可用来表示一个流程图。它 或者是一个施工流程图,或者是一个产品生产的流程图, 再或是一个数据流图(每个顶点表示一个过程)。图中每 一条有向边表示两个子工程之间的次序关系(领先关系)。 例如,一个软件专业的学生必须学习一系列基本课 程,其中有些课程是基础课,它独立于其它课程,如 《高等数学》;而另一些课程必须在学完作为它的基础 的先修课程才能开始。如在《程序设计基础》和《离散 数学》学完之前就不能开始学习《数据结构》。这些先 决条件定义了课程之间的领先(优先)关系。这个关系可 以用有向图更清楚地表示。图中顶点表示课程,有向边 (弧)表示先决条件。若课程i是课程j的先决条件,则图中 有弧<i,j>。
Status Topological Sort(ALGraph G){
//有向图G采用邻接表存储结构。若G无回路,则输出 //G的顶点的1个拓扑序列并返回OK,否则ERROR。
FindInDegree(G,indegree); //对各顶点求入度indegree[0..vernum-1] InitStack(S); for(i=0;i<G.vexnum; ++i) if(!indegree[i]) Push(S,i) //建零入度顶点栈,s入度为0者进栈 count=0; //对输出顶点计数 while (!StackEmpty(S)) { Pop(S,i);
7.5.1 拓扑排序 数学基础: 什么是拓扑排序(Topological Sort)?简单地说,由 某个集合上的一个偏序得到该集合上的一个全序,这个 操作称之为拓扑排序。 回顾离散数学中关于偏序和全序的定义: 若集合X上的关系R是自反的、反对称的和传递的, 则称只是集合X上的偏序关系。 设R是集合X上的偏序(Partial Order),如果对每个 x,y∈X必有xRy或yRx,则称 R是集合X上的全序关系。
算法 7.12
Shortest Path Algorithms 最短路径
问题背景: 假若要在计算机上建立一个交通咨询系统则可以 采用图的结构来表示实际的交通网络。图中顶点表示 城市,边表示城市间的交通联系。这个咨询系统可以 回答旅客提出的各种问题。
首先,我们来看一个简单的图的最短路径问题。 例如,一位旅客要从A城到B城,他希望选择一 条途中中转次数最少的路线。假设图中每一站都需要 换车,则这个问题反映到图上就是要找一条从顶点A到 B所含边的数目最少的路径。我们只须从顶点A出发对 图作广度优先搜索,一旦遇到顶点B就终止。由此所得 广度优先生成树上,从根顶点A到顶点B的路径就是中 转次数最少的路径,路径上A与B之间的顶点就是途径 的中转站数。
Prerequisites None None C1, C2 None C4 C5 C3, C6 C3 C7, C8 C7 C10 C7 C7 C13 C6
建立模型: 用顶点表示活动,用弧表示活动间的优先关系的 有向图称 为顶点表 示活动的网 (Activity On Vertex Network),简称AOV-网。在网中,若从顶点i到顶点j 有一条有向路径,则i是j的前驱;j是i的后继。若<i,j> 是网中一条弧,则i是j的直接前驱;j是i的直接后继。
以图7.28(a)中的有向图为例,图中v1,和v6没有 前驱,则可任选一个。假设先输出v6, 在删除v6及弧 <v6,v4>,<v6,v5>之后,只有顶点v1没有前驱,则 输出v1且删去v1及弧<v1,v2>、<v1,v3>和<v1, v4>, 之后v3和v4都没有前驱。依次类推,可从中任选一个 继续进行。 最后得到该有向图的拓扑有序序列为: v6 - v1 - v4 - v3 - v2 - v5
Course number C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15
Course name Programming I Discrete Mathematics Data Structure Calculus I Calculus II Linear Algebra Analysis of Algorithms Assembly Language Operating Systems Programming Languages Compiler Design Artificial Intelligence Computational Theory Parallel Algorithms Numerical Analysis
迪杰斯特拉算法示例:
100
v5
30Biblioteka 60v010v4
10 20
v1
5
50
v3
v2 终点 v1 v2 v3 v4 v5 vj S ∞ 10, (v0,v2) ∞ 60, (v0,v2,v3) 50, (v0,v4,v3) 90, (v0,v4,v5) 60, (v0,v4,v3,v5) v3 {v0,v2,v3,v4} v5 {v0,v2,v3,v4,v5} 30, (v0,v4) 30, (v0,v4) 100,(v0,v5) 100,(v0,v5) v2 {v0,v2} v4 {v0,v2,v4} 从v0到各终点的D值和最短路径的求解过程 ∞ ∞ ∞ ∞
一、边上权值非负情形的单源最短路径问题 问题描述: 给定带权有向图G和源点v,求从v到G中其余各顶 点的最短路径。限定各边上的权值大于或等于0。 具体实例分析: 例如,图7.34所示带权有向图G中从v0 到其余各 顶点之间的最短路径,如图7.35所示。
100
v5
30
60
始点 v4 v0
终点 v1 v2 v3 v4 v5