滑道式提升机及其控制电路的设计
滑道式提升机及其控制电路的毕业设计
滑道式提升机及其控制电路的设计摘要:矿山生产的全过程离不开矿山运输和提升工作。
因此,运输和提升工作的好坏直接关系到矿山生产能否正常高效进行。
如果说运输线路是矿山生产的动脉,那提升设备则是其咽喉,可见其重要性和必要性。
肥料对于农作物的作用非常重要,随着耕地面积的不断减少,粮食的产量显得尤其重要。
因此,肥料的生产非常重要。
BB肥料(Blending bulk fertilizer)根据作物需肥规律和土壤供肥特性进行配制,含氮、磷、钾三种元素,也可根据作物需要添加中、微量元素。
BB肥料具有如下优点,一是养分配比灵活科学合理,可以根据不同作物进行调配;二是价格便宜,同等养分的BB 肥料比进口复合肥料便宜;三是配送方便。
提升机为通过改变势能进行运输的机械设备。
提升机是一种被普遍采用的垂直输送设备,广泛地应用于建材、电力、冶金、机械、化工、轻工、有色金属、粮食等各工业部门。
可以满足用户对提升机的不同性能要求。
本课题是为了制造BB肥生产提升设备。
主要由提升斗、提升系统、机架等组成。
工作原理:将大颗粒尿素、钾肥、磷肥、填充料等按配方要求比例计算后,分别投入斗式提升机料斗,料斗经由钢丝绳牵引沿着轨道上升,提升到一定高度碰到行程开关,斗门打开,肥料卸下,料斗空载回起点。
关键词:提升机导轨钢丝绳指导老师签名:Producing 4-5 tons of BB fertilizer production equipment to upgrade SystemAbstract: The role of fertilizer for the crops is very important, as the shrinking arable land, grain production is especially important. Therefore, fertilizer production is very important.BB fertilizer (Blending bulk fertilizer) under the laws of crop fertilizer and soil characteristics for the preparation of fertilizer, nitrogen, phosphorus and potassium are three elements can be added according to crop needs, the trace elements. BB fertilizer has the following advantages, first, nutrients and flexible scientific and rational allocation according to different crops; second is cheap, the same nutrients of BB fertilizer compound fertilizer cheaper than imports; third, to facilitate distribution.Hoist by changing the potential energy for the transport of machinery and equipment. Hoist is a widely used vertical transportation equipment, widely used in building materials, electric power, metallurgy, machinery, chemicals, light industry, metals, food and other industries. Meet the different users on elevator performance requirements.The issue is to create BB Fertilizer Production Hoisting Equipment. Mainly by enhancing the Big Dipper, hoisting system, a framework. Works: The large granular urea, potash, phosphate, fillers and other requirements according to the ratio calculation formulas were put bucket elevator hopper, the hopper through the wire rope traction along the track up to a certain height to enhance hit limit switch, open The door , fertilizer unloading, hopper back to the starting point empty.Keywords: BB fertilizer Hoist Guide Track Wire RopeSignature of Supervisor:目录前言 (1)1绪论 (2)1.1各种提升机的工作原理 (2)1.2提升机的简介 (3)1.3提升机的应用 (4)1.4提升机的发展 (5)2 总体方案确定 (6)2.1 总体设计要求 (6)2.2总体设计 (6)2.2.1 工作原理 (6)2.2 .2 总体尺寸综合 (6)2.3 总体图 (6)3提升系统的设计计算 (7)3.1 料斗仓重量计算 (8)3.2 钢丝绳的确定 (9)3.2.1 钢丝绳种类 (9)3.2.2 时效原因 (10)3.2.3 钢丝绳的计算 (10)3.3 提升系统电动机选择 (13)3.3.1 选择电动机类型和结构型式 (13)3.3.2 选择电动机的容量 (14)3.3.3选择电动机的型号 (16)4 提升系统的校核 (17)4.1 导轨校核 (17)4.1.1导轨强度校核 (17)4.1.2 导轨刚度校核 (21)5 机架的设计及校核 (24)5.1 机架结构类型 (24)5.1.1 按机架外形分类 (24)5.1.2 按机架的制造方法和材料分类 (24)5.2 机架结构的选择 (24)5.3 机架设计计算的准则和要求 (25)5.3.1 机架设计的准则 (25)5.3.2 机架设计的一般要求 (25)5.4 机架的形式及主要参数 (25)5.5机架的强度校核 (27)5.6 机架的刚度校核 (31)5.7立柱的强度及稳定性校核 (36)6 检验安装和使用维修 (37)6.1 检验规则 (37)6.2 吊装,安装和调整 (37)6.3 使用操作 (38)6.4 维修保养和故障排除 (38)结论 (39)参考文献 (40)致谢 (41)前言矿山生产的全过程离不开矿山运输和提升工作。
提升机电气控制系统
1、把电控箱通上电源,把操作旋钮打到手动位置;点动启动电机,观察电机旋向是否正确。
(从风叶方向看为顺时针旋转)2、弄清手动换向阀的三个位置:(1)拉向压力表端为松绳;(2)中位不通;(3)推向蓄能器端为紧绳。
3、压力调整,手动开动油泵,把手动换向阀手柄打在中间位置,把两个溢流阀的手柄都松开,手动按下电磁阀按钮通电,把手动换向阀打到张紧位置,缓慢调整系统溢流阀(在阀块上面),观察压力表指示针(黑色针),超过压力上限(红色针)一个格为宜,停止油泵后再重新启动油泵,缓慢调节工作压力溢流阀(侧面),等压力超过上限一格后停止,把两个溢流阀的调节螺栓锁紧,手动调整完成,把控制箱的操作旋钮打到自动位置启动完成即可。
正常工作时,手动阀手柄必须打到张紧位置。
4、液压油缸的活塞杆伸出600~1000mm即可,不能太长,也不能太短,油压压力在9~12MPa之间,也可根据现场情况确定:(1)回柱绞车不能将油缸完全拉出,也不要让油缸完全缩回去;(2)皮带带载运行时不打滑即可。
5、收带时操作,机架托辊拆完后,皮带机开动,移动机尾,回柱绞车紧绳,紧绳时注意观察、听绞车电机是否有异响。
如皮带机不开动,先移动机尾,让皮带完全松开,再紧拉紧绞车,预紧完成后再开动皮带机,开动回柱绞车,完成张紧。
交流提升机可编程电控系统保护装置设置标准探讨矿井提升电控系统是一个典型而复杂的控制和系统。
在这里面,可编程序控制器的作用可以说是表现得淋漓尽致,当前,焦作华飞、中矿传动、洛阳矿机、天津民意等生产提升机电迭系统为著称的厂家无不以可编程控制器为控制核心。
笔者曾多次跟随集团公司外出检查,常听说因可编程电控系统保护装置问题出现这样或那样的问题,甚至发生了提升事故,可以说,提升机可编程电控系统保护装置设置因厂家而异,有很大的随意性,国家也无相关的标准设计规范。
因此,笔者说交流提升机可编程电控保护装置的设置作以下控讨。
1.交流提升机可编程电控系统的组成原则按照原煤炭部西安会议精神要求,利用可编程控制器为控制核心的提升机电控系统应设置为双线制。
提升机主电路设计课程设计

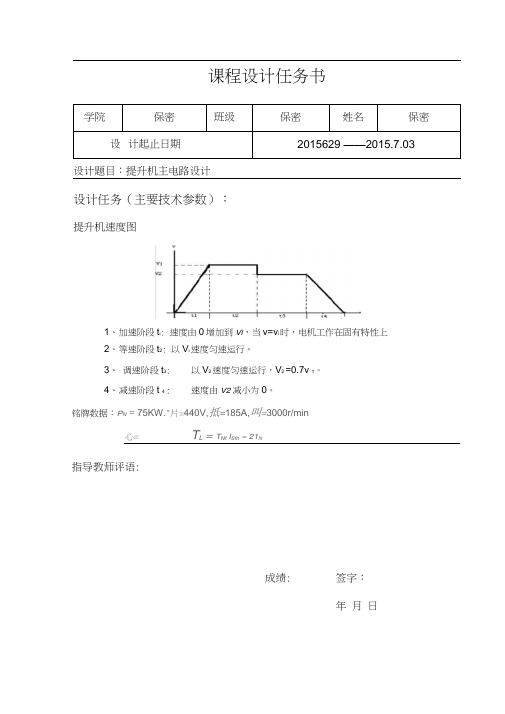
共享知识分享快乐课程设计任务书学院保密班级保密姓名保密设计起止日期2015629 ——2015.7.03设计题目:提升机主电路设计设计任务(主要技术参数):提升机速度图1、加速阶段t i: 速度由0增加到V1,当V=V1时,电机工作在固有特性上2、等速阶段t2: 以V i速度匀速运行。
3、调速阶段t3: 以V2速度匀速运行,V2 =0.7v 1。
4、减速阶段t 4 : 速度由V2减小为0。
P N=75KW,U N=440V/185A. n N = 3000r/mn= 0.0555" T L = J, l sm = 2I N指导教师评语:成绩:签字:年月铭牌数据:沈阳大学沈阳大学1.3 、综合分析以上三种方法,采用电枢回路串电阻的方法比较适宜。
1.4、串电阻的启动过程:如图1是一个5级串电阻启动电路图,启动电阻分为5段,即心5、S 、心3、心2和它们分别与接触器的触头 KM5 KM4 KM3 KM2KM 併联。
启动开始瞬间,5个开关均断开,电枢回路的总电阻为「一运行点在图2中的a 点,启动电流为八启动转矩为“',电动机开始升速,转速沿着]特性曲线变化,启动电流下降,到图 2中的 b 点时启动电流降到切换电流'',再次瞬间KM5闭合切除一段电阻’,电枢总电阻变 为■''' ' ■' ''"',相应的机械特性曲线为’直线,切除电阻瞬间转 速不变,电流则突增至;|,此后则重复上述过程,直到开关 KM1闭合,电动机在固有机械特性上升速,到达I 点,"',电动机稳定运行,启动过程结束。
1.5、计算参数启动时电枢总电阻为:叶 440启动电流比:2加 L2T^=1-67启动级数为:由取整后的启动级数 m 计算启动电流比’得:计算各级电阻:r sX =(A' - l )R a = (1.846 - 1) X 0.05550 = 0.0469Qm — 二5r s2 = Xr sl = 1.846 x 0.046917 = 0.0867flr s3 = A'2r sl = 1.8462 x 0.0469Q = 0.159811r s4 = Z3r sl = 1.8463 x 0.0469Q = 0.2950^r sS= A,4r sl= 1.8464 x 0.0469Q = 0.5446H验证:R°■+ 5 + F+心3 +心4 +叫5 =局机1.6 、电机启动电路图如图1及其机械特性图如图2:图1.电机启动电路图i2 ii 1<图2.电机启动机械特性图沈阳大学沈阳大学2、调速 2.1 、定义:使电动机转速增加或降低的过程叫做调速。
提升机TKD电气控制系统2
现代电气自动控制技术
Y SH X
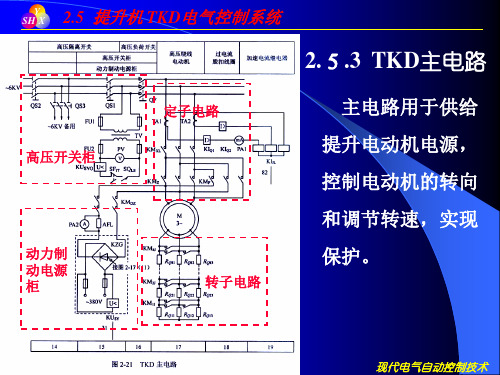
2.5 提升机 TKD电气控制系统
下:
给中BKK6AA,定根FSD的使自据Z 动所两整提作短个角升灵接自机方敏整,的向。角使激也机K磁有AB电选Z5、择路、
性的工作,并相互闭锁。
现代电气自动控制技术
Y SH X
2.5 提升机 TKD电气控制系统
②(低高③K动子R压2于电力5低V换)速在串为2K④K段阻制(速A,向A入这 了度过动。2爬SG7接当D等5三 使S继速)时为行释2K触提(速个 速、1、电继按了放器升25阶线 度K29%电速使值器二机.)R5段圈继器时度K提时KV次速,3电电过、K动R(原升,给度在VA路器1速2作1则重电降使.S(82等D中的继)K,,调物2电分吸速6,电断节时)阻别持器阶开转动、在, 提力升制机值安动再降全减次低电速加以路和速便,下,与进放当释行重速放安物度值全时接制动近动力,。 升它制性又高动曲使令触于K1加线高.A速 头K速1的GA压5度 与S,S2×临换D继 外的切的向2界电 加吸换2接整值器电0合速触=本阻附定值度2器身并5近时均电断3的联,,V能压常,。希在闭使为但特望 电KR,V切外1K、断A加KG电电RS2V源本阻2、而身在K减的继R速V电动3,的器作由吸吸电合持压值前为和
2.5.4 TKD测速电路
测速电路就是把提升机的实际速度测量出来并转 化为电量,为速度电路和一些以速度为函数的电气控 制元件提供信号。如图2-22所示。
现代电气自动控制技术
提升机电控系统设计框架
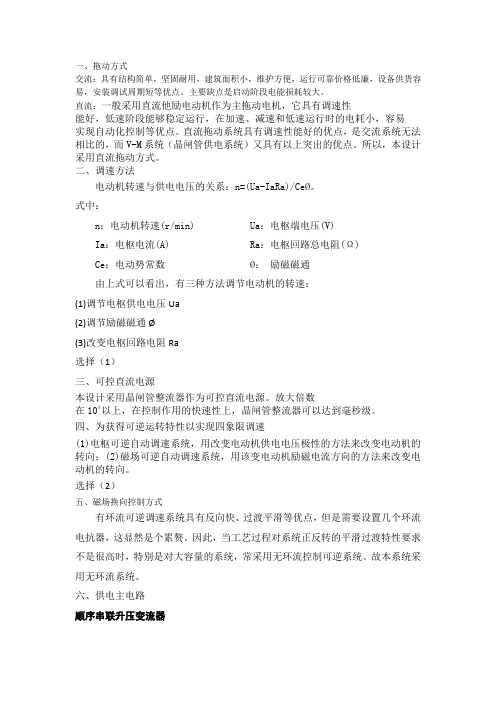
一、拖动方式交流:具有结构简单,坚固耐用,建筑面积小,维护方便,运行可靠价格低廉,设备供货容易,安装调试周期短等优点。
主要缺点是启动阶段电能损耗较大。
直流:一般采用直流他励电动机作为主拖动电机,它具有调速性能好,低速阶段能够稳定运行,在加速、减速和低速运行时的电耗小,容易实现自动化控制等优点。
直流拖动系统具有调速性能好的优点,是交流系统无法相比的,而V-M系统(晶闸管供电系统)又具有以上突出的优点。
所以,本设计采用直流拖动方式。
二、调速方法电动机转速与供电电压的关系:n=(Ua-IaRa)/CeØ。
式中:n:电动机转速(r/min) Ua:电枢端电压(V)Ia:电枢电流(A) Ra:电枢回路总电阻(Ω)Ce:电动势常数Ø:励磁磁通由上式可以看出,有三种方法调节电动机的转速:(1)调节电枢供电电压Ua(2)调节励磁磁通Ø(3)改变电枢回路电阻Ra选择(1)三、可控直流电源本设计采用晶闸管整流器作为可控直流电源。
放大倍数在104以上,在控制作用的快速性上,晶闸管整流器可以达到毫秒级。
四、为获得可逆运转特性以实现四象限调速(1)电枢可逆自动调速系统,用改变电动机供电电压极性的方法来改变电动机的转向;(2)磁场可逆自动调速系统,用该变电动机励磁电流方向的方法来改变电动机的转向。
选择(2)五、磁场换向控制方式有环流可逆调速系统具有反向快、过渡平滑等优点,但是需要设置几个环流电抗器,这显然是个累赘。
因此,当工艺过程对系统正反转的平滑过渡特性要求不是很高时,特别是对大容量的系统,常采用无环流控制可逆系统。
故本系统采用无环流系统。
六、供电主电路顺序串联升压变流器如图所示,两组变流器按升压方式串联,其控制方式可采用顺序控制。
图4.7顺序串联升压变流器电路图先使II组保持αIImax不变,单独控制I组使它由βImin向αImin变化,然后再保持αImin不变,单独控制II组使之自βIImin向αIImin变化,最终两组都运行在αmin状态,此时I组和II组均工作在最大整流状态,输出电动势最大。
滑道式提升机及其控制电路的设计
滑道式提升机及其控制电路的设计矿山生产的全过程离不开矿山运输和提升工作。
因此,运输和提升工作的好坏直接关系到矿山生产能否正常高效进行。
如果说运输线路是矿山生产的动脉,那提升设备则是其咽喉,可见其重要性和必要性。
提升机是联系井下和地面的主要运输工具,矿井提升工作是整个采矿工程中的重要环节。
从地下采出的煤炭、矿石必须提升至地面才有实际应用价值。
废石的提升、工作人员、材料及设备的升降等都要靠提升工作来完成。
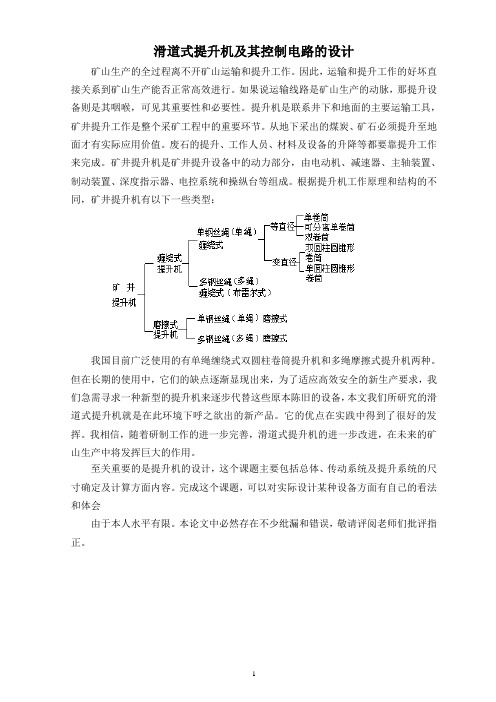
矿井提升机是矿井提升设备中的动力部分,由电动机、减速器、主轴装置、制动装置、深度指示器、电控系统和操纵台等组成。
根据提升机工作原理和结构的不同,矿井提升机有以下一些类型:我国目前广泛使用的有单绳缠绕式双圆柱卷筒提升机和多绳摩擦式提升机两种。
但在长期的使用中,它们的缺点逐渐显现出来,为了适应高效安全的新生产要求,我们急需寻求一种新型的提升机来逐步代替这些原本陈旧的设备,本文我们所研究的滑道式提升机就是在此环境下呼之欲出的新产品。
它的优点在实践中得到了很好的发挥。
我相信,随着研制工作的进一步完善,滑道式提升机的进一步改进,在未来的矿山生产中将发挥巨大的作用。
至关重要的是提升机的设计,这个课题主要包括总体、传动系统及提升系统的尺寸确定及计算方面内容。
完成这个课题,可以对实际设计某种设备方面有自己的看法和体会由于本人水平有限。
本论文中必然存在不少纰漏和错误,敬请评阅老师们批评指正。
1 绪论1.1各种提升机的工作原理D型斗式提升机由运行部分(料斗与牵引胶带),带有传动滚筒的上部区段,带有拉紧滚筒的下部区段,中间机壳,驱动装置,逆止制动装置等组成,适用于向上输送松散密度ρ<1.5t/m3粉状、粒状和小块状的无磨琢性和半磨琢性散状物料,如煤、砂、焦末、水泥、碎矿石等。
TD型斗式提升机结构形式:传动装置T D型斗提升机的传动装置有两种形式分别配有YZ型减速器ZQ(或YY)型减速器。
YZ型轴减速器直接装在主轴轴头上,省去了传动平台、联轴器等,使结构紧凑、重量轻,而且其内部带有异型辊逆止器,逆止可靠。
TKD-A 提升机电气控制线路设计
TKD-A 提升机电气控制线路设计概述TKD-A 电气控制系统是为单绳缠绕式交流提升机配套设计。
该系统在加速阶段采用转子附加电阻调速,减速阶段采用动力制动等减速方式,可实现六阶段提升。
转子回路切电阻采用电流附加时间原则。
该系统主要包括主回路(定子回路、转子回路)、测速回路、安全回路、控制回路、辅助回路、可调闸回路等。
第一节主回路设计一、主回路工作原理1、定子回路提升电动机M的定子绕组经高压隔离开关QS1、高压油断路器QFG和高压换向器(正向接触器KMZ或反向接触器KMF)及线路接触器KML与高压6KV 电源相连。
接触器KML及KMZ或KMF控制电动机的通断和转向。
高压油断路器设有失压脱扣器LSY及过流脱扣器LGL1 、LGL2 ,当电源电压过低或电动机过载时,QFG断开以保护电动机,同时串接在安全回路的常开触头断开,实现安全制动;与LSY串接了两个保护开关的闭锁触头:紧急情况下供司机控制的脚踏开关SJT的常开触头,高压换向室栏栅门闭锁开关SHL的常开触头。
后者的作用是,在提升机正常工作时,为保障生产和人身安全,防止人员误入换向室。
当采用动力制动时,控制回路将断开KMF或KMZ及KML,却保证动力制动接触器KMD有电,提升机电动机定子改由可控硅变流装置送入直流电。
QS2 和QS3 分别为6KV电源进线和备用线的高压隔离开关。
2、转子回路转子回路外接8段电阻,在加速和动力制动过程中,由加速接触器KM1-KM8分段切除,来改变电动机的起动和制动特性,以满足提升机对速度的要求,并限制转子电流。
第二节测速回路设计测速回路反映了提升系统的实际速度和提升机旋转方向。
测速回路的核心部件是他激直流发电机TG。
由主电动机拖动,测速发电机电枢电压与提升电动机转速成正比。
其励磁线圈LTG由稳压电源V WY及可控硅整流装置VG9单独供电。
当提升机以最大速度V M运转时,TGF的电枢电压为220V,电压的极性决定于提升机的转向。
提升机课件(控制部分)

04
提升机控制案例分析
案例一:某矿井提升机的控制系统改造
总结词:成功案例
详细描述:某矿井提升机由于设备老化、控制系统落后,导致运行效率低下、安 全性能不足。经过技术改造,采用先进的PLC控制系统,实现自动化控制,提高 了提升机的运行效率和安全性。
案例二
总结词:创新设计
详细描述:在某大型水利工程中,闸门提升机的作用至关重要。为了确保闸门提升机的稳定、安全运行,采用了基于传感器 和智能算法的控制系统设计,实现了闸门提升机的精确控制和故障预警。
按卷筒形式分类
可分为单卷筒和双卷筒提升机。单卷筒提升机只有一个卷 筒,双卷筒提升机则有两个卷筒,具有更大的提升高度和 载重量。
02
提升机控制系统
控制系统的组成与功能
执行机构
根据控制器输出的控制量,驱 动提升机进行相应的动作。
人机界面
提供操作界面和显示界面,方 便操作人员监控和控制提升机。
控制器
接收操作指令和传感器信号, 根据控制算法计算出控制量, 输出到执行机构。
提升机的工作原理
电动机驱动
提升机通常由电动机驱动,通过减速 器和传动装置将动力传递到卷筒或滑 轮上。
卷筒或滑轮转动
提升容器升降
提升容器可以是罐笼、箕斗、矿车等, 用于装载和卸载物料。通过钢丝绳或 其他提升介质的收放,实现提升容器 的升降运动。
卷筒或滑轮的转动使钢丝绳或其他提 升介质产生运动,进而带动提升容器 升降。
环境友好性
在环保意识日益增强的背景下,提升机控制 系统的环境友好性也成为了重要的研究方向。 通过优化控制系统和采用环保材料,降低提 升机作业对环境的影响。
THANKS
感谢观看
VS
远程控制
PLC控制提升机电气控制系统设计
矿井维修电工(08)技师班毕业设计2010年6月PLC控制提升机电气控制系统设计杨锋志20010年6月随着人类科学技术的迅猛发展,传统电气控制系统的弊端也逐渐显现,淘汰已成必然,电气控制技术也由继电器控制过渡到了计算机控制系统。
PLC可编程控制器正是在继电器控制和计算机技术的基础上,逐渐发展起来的以微处理器为核心,集微电子技术,自动化技术,计算机技术,通信技术为一体,以工业自动化控制为目标的新型控制装置。
它已逐步成为工业自动化设备的主导产品,因它具有控制能力强,可靠性高,使用方便,适用与不同控制要求的各种控制对象等优点,其工作原理,设计和使用方法也成为电气和机电类专业的必修课程。
它的出现对提高机械设备自动控制性能起到了关键的作用,带动了自动控制产品向着控制可靠、操作简单、通用性强、价格低廉的方向发展,使自动控制的实现越来越容易。
PLC可编程控制器目前已在工业、交通运输、农业、商务等领域得到广泛应用,成为各行业的通用控制产品。
这几年随着煤矿矿井的不断扩建,产量的不断提升以及机械化、自动化的不断提高,同时也为煤矿设备能够在井下恶劣和危险的环境下准确灵敏的实现各项保护功能,真正实现“安全第一,预防为主”的煤矿安全生产方针。
使得PLC可编程控制器在矿山设备中也得到了广泛的应用,这就迫切的要求我们在最短的时间内学习和了解PLC可编程控制器的原理和应用。
这个专业同时也是我个人的兴趣和爱好以及在工作中和实际处理问题中经常遇到的一个难题,因此学好此课题对我来讲至关重要也是当务之急。
此专业知识的学习和掌握将会我在以后的工作中起到不可忽视的作用和产生巨大的帮助矿井提升系统是矿山生产的关键设备,从井下采出的煤炭及矸石的提升,材料的下放,人员和设备的升降都是由提升设备来完成的。
因此,采用更先进的技术,更安全可靠的控制方式来改善提升机电控装置的技术性能,将直接提高矿山生产的效率及安全程度。
综上所述,将PLC可编程技术与提升机电控系统相结合,便是本人所要做的毕业设计题目是《PLC控制提升机电气控制系统的设计》。
提升机主电路设计课程设计
课程设计任务书学院保密班级保密姓名保密设计起止日期2015629 ——2015.7.03设计题目:提升机主电路设计设计任务(主要技术参数):提升机速度图1、加速阶段t i: 速度由0增加到Vi,当v=v i时,电机工作在固有特性上2、等速阶段t2: 以V i速度匀速运行。
3、调速阶段t3: 以V2速度匀速运行,V2 =0.7v 1。
4、减速阶段t 4 : 速度由V2减小为0。
铭牌数据:P N= 75KW."片=440V,抵=185A,叫=3000r/min心= T L=T Nf I Sfn= 21N指导教师评语:成绩: 签字:年月日沈阳大学沈阳大学沈阳大学1.3 、综合分析以上三种方法,采用电枢回路串电阻的方法比较适宜。
1.4、串电阻的启动过程:如图1是一个5级串电阻启动电路图,启动电阻分 为5段,即◎、口4、匸、◎和它们分别与接触器的触头 KM5 KM4 KM3 KM2 KM1并联。
启动开始瞬间,5个开关均断开,电枢回路的总电阻为= % + r 5S + 04 + F +厂垃+ ,运行点在图2中的a 点,启动电流为人启动转 矩为T I >T L ,电动机开始升速,转速沿着尺舟特性曲线变化,启动电流下降,到图2中 的b 点时启动电流降到切换电流网,再次瞬间KM5闭合切除一段电阻 ,电枢总电阻 变为兀/© + G4+F + F + :I ,相应的机械特性曲线为直线,切除电阻瞬间 转速不变,电流则突增至 ,此后则重复上述过程,直到开关 KM1闭合,电动机在固 有机械特性上升速,到达I 点,『二八,电动机稳定运行,启动过程结束。
1.5、计算参数启动时电枢总电阻为:440启动电流比:1-二------ — ------ —1,672 口艸1捡启动级数为:由取整后的启动级数 m 计算启动电流比才得:计算各级电阻:sinm = int=intrin (1-189/0.0555)1In 1,67=5r订=(A - = (1.846 - 1) x O.O555P = 0.0469Hr j2= = L846 X 0.0469D = 0.0867!!= A = 1.8462 X 0.0469(1 = 0.159811r j4 = JL3r sl= 1.846* x 0.0469Q 二0.2950Q=几,、i = 1.8464 X 0.0469fi = 0.5446il 验证:心 + F + J + r s4 + r s5 J1.6、电机启动电路图如图1及其机械特性图如图2:II0 Ta T L Tl2H I*图2.电机启动机械特性图沈阳大学2、调速2.1 、定义:使电动机转速增加或降低的过程叫做调速。
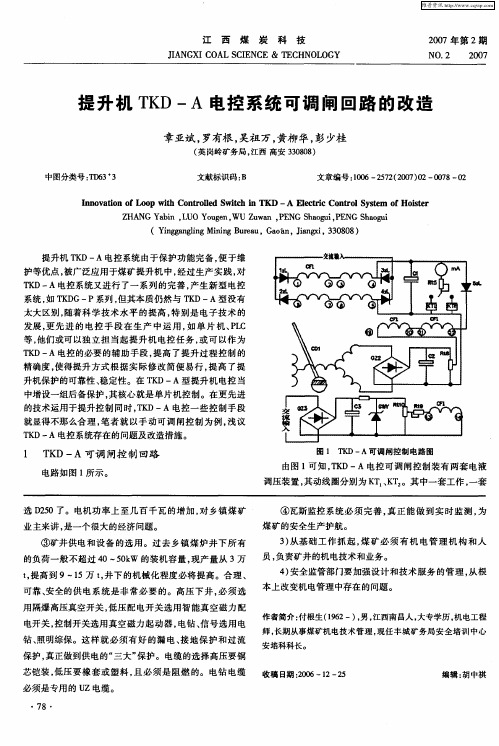
提升机TKD—A电控系统可调闸回路的改造
(Yngnl g nn ueu G o i agn igB ra , a t J nx, 3 8 8 g i Mi m, i gi 30 0 ) a
提升机 T D—A电控系统 由于保护 功能完备 , 于维 K 便
护等优点 , 被广泛应用于煤矿提升机 中 , 经过生产实践 , 对
T D— K A电控系统又 进行 了一 系列 的完善 , 产生新 型 电控
必 须是专用 的 U Z电缆 。
・
作者简介 : 付根生 (9 2一) 男 , 16 , 江西南 昌人 , 大专学历 , 电工程 机
师, 长期从事煤矿机电技术 管理 , 现任 丰城矿务 局安全 培训 中心 安 培科科长 。
收稿 日期 :06—1 2 20 2— 5
编辑 : 中祺 胡
78 ・
压升高 , 制动力矩减 小 , 提升机 处于松 闸过 程 , 之 , K 左右 , 反 当 T 改造 后效果 良好 , 完全能满足要求 。 中电流减 小时 , 处于 紧闸过 程。C 。 F 磁放大器 交流绕 组按 4 内正反馈 方式接线 , 流 电经二极管整 流后 , 交 再经 C 滤波 。 与 Rr匹配负载加在电液调压装置动线 圈 K 。 K 2 。 1 5 T或 T上 为了保证在磁放大器 到达饱 和时 , T线 圈承受最 大 电压 , K
精确度 , 使得提升 方式根 据实 际修改 简便 易行 , 高 了提 提 升机保护的可靠性 、 稳定性 。在 T D—A型 提升机 电控 当 K
中增设一组后备保护 , 其核心就是单 片机控制 。在更先 进 的技术运用于提升控制 同时 ,K T D—A电控一些 控制手 段 就显得不那么合理 , 笔者 就 以手动可 调 闸控制 为例 , 议 浅 T D— K A电控系统存在 的问题及改造措施。
电机设计的毕业论文选题

单轨抓斗起重机设计K-H型行星减速箱设计—DOF工业机器人的结构设计Z型行星齿轮减速器设计-DOF SCARA机器人结构设计与运动模拟kW少齿差行星减速器设计R六杆Ⅲ级机构的动态仿真kw三级行星齿轮减速机构设计t液压挖掘机主铲工作装置与驱动系统设计米槽形托辊带式输送机设计度角度头设计及仿真mm旋转行波超声电机的设计与工艺kW风电机组主传动系统设计C普通车床主轴箱传动设计CA普通车床的数控技术改造CAD CAM技术在摩托车护片锻模设计中的应用CAN总线在汽车仪表的应用C型搅拌摩擦焊机机械结构设计LPX电动机下置式锤式破碎机设计LS型螺旋输送机设计设计RPP平面连杆机构的动态仿真RRP平面连杆机构的动态仿真RRR平面连杆机构的动态仿真XXX零件CAD CAM及其工艺工装设计Y大倾角螺旋输送机设计YAH-圆振动筛设计Φ×锤式破碎机设基于SOLIDWORKS的摆线针轮减速器设计搬运机械手机构与控制电路设计搬运机械手极其控制系统设计保健绷带装配机设计变频调速磁性皮带喂料器的设计便携式家用衣物烘干机系统设计标准筛振筛机的总体及夹紧装置的设计表面粗糙度的激光检测系统设计差速器主外壳机械加工工艺工装设计超声波测距仪系统设计车梁加工用翻转台的设计惩罚函数法二级圆柱齿轮减速器的优化设计出钢机凸轮驱动式的前支撑设计大众宝来轿车传动机构总体设计刀杆手动压力机设计倒伞型曝气机有限元分析及优化设计机电一体化-T6113电气控制系统的设计机电一体化-连杆平行度测量仪设计-CA-20地下自卸汽车工作、转向液压系统 20.JX0020+设计-DTⅡ型皮带机设计关注微信公众号:得力机械毕业设计论文,免费领取成品设计-GBW92外圆滚压装置设计NK型凝汽式汽轮机调节系统的设计SPT120推料装置T611镗床主轴箱传动设计及尾柱设计XQB小型泥浆泵的结构设计YZJ压装机整机液压系统设计三自由度圆柱坐标型工业机器人设计乳化液泵的设计双柱式机械式举升机设计外圆磨床设计大型制药厂热电冷三联供大型轴齿轮专用机床设计大模数蜗杆铣刀专用机床设计小型轧钢机设计巷道堆垛类自动化立体车库巷道式自动化立体车库升降部分拖拉机变速箱体上四个定位平面专用夹具及组合机床设计板材送进夹钳装置校直机设计棒料切割机涡轮盘液压立拉夹具电动跑步机的设计刮板输送机设计>管道外圆自动焊接机结构设计管磨机的总体和结构设计滚轮式脚踏式液压升降平台车设计飞行模拟转台设计飞机起落架机构设计及安全性分析钢筋弯曲机的结构及其仿真设计复摆腭式破碎机设计>复合形法减速器优化设计钢筋切断机仿真设计高速电主轴的虚拟设计沟槽凸轮机构的设计和运动仿真滚筒混合机混合单元的设计滚筒式抛丸清理机的总体和结构设计焊接机械手的传动机构与控制系统设计滑道式提升机及其控制电路的设计机械手关节结构设计及运动学仿真分析混凝土搅拌车搅拌实验系统仿真设计S195柴油机机体三面精镗组合机床总体设计及夹具设计车床主轴箱箱体右侧10-M8螺纹底孔组合钻床设计货车底盘布置轴向柱塞泵设计轿车双摆臂悬架的设计及产品建模输出轴工艺与工装设计代做添加企鹅973578218,发送要求,第一时间回复输出轴的工装工艺设计过桥齿轮轴机械加工工艺规程连杆零件加工工艺基于PLC的刀具立体仓库的控制系统设计基于PLC的上下料机械手设计基于单片机的乒乓球发球机构设计及运动仿真基于电磁感应传感器的智能车系统设计(单驱动)基于电磁感应传感器的智能车系统设计(直立双驱动)基于激光传感器的智能车系统设计(单驱动寻白线)基于摄像头的智能车系统设计(单驱动寻白线)激光测距仪系统设计棘轮型手动压力机的设计集装箱吊架结构设计及强度刚度校核加工中心刀库系统设计加速度过载模拟实验台设计交流电梯PLC控制系统设计简易吊车设计连铸机振动装置设计轮式移动机器人的结构设计轮胎式起重机起升机构传动装置设计螺旋管状面筋机总体及坯片导出装置设计螺旋输送式连续洗米机的设计模糊控制洗衣机控制系统设计煤矿控制设备在线检测时的液压夹具系统设计面向LED封装的XY二自由度的工作台的设计摩托车前减震器的设计摩托车振动与耐久实验台的设计与开发摩托车专用升降平台设计双工位自动送料架数控车床卡盘自动夹紧装置的设计Q滚筒式抛丸清理机的设计多功能病床设计家居防盗报警系统的研究与设计智能座便器设计开背按摩垫的设计与研究专用磨床回转工作台的结构设计三自由度圆柱坐标型工业机器人机械结构设计皮带轮旋压机主机架组件设计食品D打印机的结构设计JCK 数控车床设计——总体方案及主传动系统设计链条提升单车位停车设备的设计与研究D打印机的毕业设计基于PLC的采煤机牵引控制系统设计聚丙烯-玻纤复合成型机设计YZD双钢轮振动压路机振动轮设计重型插板式液压支架设计三工位自动钻孔工作台的设计汽车曲柄连杆机构设计与有限元分析基于PLC普通车床C的数控化改造转向架水力清洗除锈装置液压控制系统设计轨道车辆车体变形矫正装置液压控制系统设计地铁车站站台防护系统设计地铁双开塞拉门系统设计MJ棍子排锯机凹形侧支承板钻铰组合机床设计两自由度数控云台设计xKN串联式液压绞纲机D两板式注塑机自锁式锁模装置的设计洗块煤自动配仓技术研究(plc)行星减速机设计与运动学分析马铃薯收获机的分离与传动装置货物分拣后定位查找系统设计数控激光切割机的机械结构设计自动座便器结构设计毛巾布超声波分条分切机码坯自动化生产线夹盘设码坯自动化生产线横向编组设计kn四柱式压力机的设计滚筒与滚筒轴自动装配机设计基于ProE的某五档机械变速器三维实体建模与运动仿真基于VERICUT的多轴加工中心仿真自动人行道二级圆柱齿轮减速器设计推力滚子轴承外罩稻米除杂精选机械总体设计秸秆揉搓粉碎机自动无人小车抬臂系统设计东风天锦海鲜活鱼运输车设计机械式截煤机设计。
提升机TKD电气控制系统
流和转子电阻的函数。 Ⅲ区是定子制动电流不
变时切除电阻的一簇特
性曲线,此时制动过程
沿着1、2、3……曲线
一直到某一低速度vc。
低①速脉爬动行控制 提升电动机交替工作在自由滑行 减速和为电了动实运现行准加确速停状车态,,提使升提机升在机减的速平末均,速应度以约约为 爬0行下.行5几程m速种误②/s度的:差低vv,cc。频低此拖速时动爬相行应使,的提补拖升偿动电以力动前为机各F改4段,由运控低行制频中方电积式源累有供的以电, 低频电源设备主要有晶闸管变频装置和变频机组。
工作绕组(1-2,3-4,5-6,7-8) (8)也是内正反馈接线。
控制绕组(11-12)(9)接成 外正反馈。用以得到如图2-19所示继 电特性,调整Rt21可以改变特性曲线 环的宽度。
当偏实移际绕组速(度2超1-过22给)定(速4)度, 用10以%调时整,超AM速2的(整15定-1值6)。绕组中
作和区段进,B如=入交图B了流m0中中+si磁磁的Bn的ωm化场曲s曲it曲强n线线ω线度bta。增的。相饱加相,
应铁芯的导磁磁场场率强强μ度度下HH降变变。化化曲曲线线, 而可如图由交中磁流的化绕曲组线线电b求感’。得L与,μ如成图正比,所以交流电路内电流 增中的大曲。线由a此’。可看出,在磁饱和区,控制绕组内较小 的直流电流的改变,通过铁芯导磁率的改变而改变
(1)磁放大器的基本原理
如图2-12所示。铁芯中有两个绕组,一个是工 作绕组(交流绕组)WL,其匝数为NL,这个绕组通 过负载RL接到交流电源上;另一个是控制绕组(直 流绕组)Wc,其匝数为NC。
磁放大器铁芯磁化曲 线N和磁感应变化曲线B、 H如图2-13所示。
当由工图作可绕见组,接当交有流控电 源制,电控流制IC≠绕0时组组,中中交直直、流流不直为为流零 时激零,磁时其共,磁同其感磁作应感用强应,度强铁度芯的工
交流提升机电控系统主控台电气工作原理
交流提升机电控系统主控台电气工作原理一、总开关、制动泵控制1、1ZK为主控台的电源总开关,起过载、过流作用。
2、制动泵控制:接触器JC1用于控制制动泵的分断与闭合,D1为制动泵1,D2为制动泵2,其中一个使用,另外一个为备用,K1为两台制动泵电机的切换开关,按制动泵启动按钮1QA,此时JC1得电,制动泵启动,工作指示灯ZDBD亮。
当制动油过压后,由外部传感器来的信号经PLC处理后,串接在控制回路的J2接点断开,制动泵停转。
(画虚线的为外部电路)调绳时也应变化。
二、润滑泵控制润滑泵控制:接触器JC2、JC3分别控制两台润滑泵的分断与闭合,2HK转换开关为两润滑泵的转换开关,润滑泵工作指示灯为RHBD,为实现其中一路润滑泵电机自动启停,在其控制回路串入RHBK接点,由PLC进行自动控制。
三、电源指示、调绳控制、安全回路1、用指针表指示AC220V电源,另在表头上增加了电源检测模块,有无电压信号送到主机的X47端。
2、调绳控制主要用于落地式双滚筒单绳缠绕式提升机,由1HK、5AK、6AK、Q1、Q2及JXK9组成,其中1HK为调绳转换开关,5AK为G1阀控制开关,6AK为G2阀控制开关,Q1、Q2为调绳离合器的行程开关,JXK9为调绳安全联锁开关。
TKSD为调绳开始指示灯,TDWD为调绳到位指示灯,调绳时需接通控制电源,开动制动泵,并把调绳转换开关转至调绳位置。
调绳过程中,离合器正在打开时Q1开关不被压,Q2开关还未被压,信号灯TKDB 和TDWD 同时亮,表示离合器正在打开。
当离合器全部打开时,Q2 开关被压住,一方面PLC 机安全回路中的常开闭点Q1-2 闭合,联锁解除;另一方面使TDWD 熄灭,只有TKSD灯亮,表示离合器完全打开,可以开动提升机进行调绳。
在离合器合上过程中,指示灯TKSD和TDWD 全亮,逻辑常闭点Q1-2 点断开安全回路,进行安全联锁,至离合器完全合上时,Q1 被压,TKSD指示灯熄灭,只有TDWD指示灯亮,说明离合器已合上,此时Q1-2 点闭合,解除安全联锁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)题目:滑道式提升机及其控制电路的设计学院:专业名称:班级学号:学生姓名:指导教师:二○**年六月毕业设计(论文)任务书I、毕业设计(论文)题目:滑道式提升机及其控制电路的设计II、毕业设计(论文)使用的原始资料(数据)及设计技术要求:1、生产率:4-5吨/时;2、装机容量:5.5千瓦;3、提升重量:500kg;4、提升斗自动开门,有自锁功能。
III、毕业设计(论文)工作内容及完成时间:1.查阅资料,英文资料翻译(2周)1月3日~1月17日2.撰写开题报告(1周)1月18日~1月23日3.设计并绘制滑道式提升机的设计装配图(5周)2月21日~3月27日4.绘制主要零件图若干张(4周)3月27日~4月23日5.编写设计计算说明书(毕业论文)一份(3周)4月25日~5月21日6.毕业设计审查、毕业答辩(1.5周)5月23日~ 6月2日Ⅳ、主要参考资料:[1] 璞良贵,纪名刚主编.机械设计.第七版.北京:高等教育出版社,2001[2] 金国淼等.搅拌设备(化工设备设计全书).北京:化学工业出版社,2002[3] 徐灏主编,机械设计手册.北京:机械工业出版社,1995.12[4] 李克永.化工机械手册. 天津: 天津大学出版社,1991.5[5] Bathala C. Redlaty, V. S. Muvthy, Madaboosi S. Ananth, Chamarti D. P. Rao. Modeling of continuous Fertilizer Cranulation process for control. Part. Part. Syst. Charact 15(1998):156-160毕业设计(论文)开题报告题目滑道式提升机及其控制电路的设计专业名称班级学号学生姓名指导教师填表日期20** 年 1 月23 日滑道式提升机及其控制电路的设计一、选题的依据及意义:矿山电力拖动系统(如提升机、钢缆皮带等)广泛应用于煤矿、有色金属、黑色金属及化工等行业,承担矿物的提升、人员的上下、材料的运送等任务,是矿山大型咽喉设备,其性能的好坏直接影响矿山的生产和人员的生命安危。
目前在西方发达国家,矿山电力拖动系统已普遍采用了全数字控制技术,如交交变流拖动的全数字变频控制、直直交拖动的全数字调速控制等。
目前交交变频技术在冶金自动化设计研究院和天津电气传动研究所应用的比较多,交直交变流技术目前还处于探索阶段。
二、国内外研究概况及发展趋势(含文献综述):90年代前,我国矿山交流拖动一般采用“异步电机+转子串电阻加速+高压接触器换向+动力制动减速+继电器控制”的传统控制方式;直流拖动在70年代前一般采用“发电机一电动机机组+继电器控制”即”P+D”控制方式,或采用“可控硅供电——电动机+模拟调节+继电器控制”的控制方式,上述拖动方式存在能耗大、运行效率低、占地面积大、噪音高、维护困难、分立元件多、参数分散性大、可靠性低、控制方式陈旧、技术落后等缺点。
进入90年代,一方面,我国新建矿井从国外引进了一部分全数字控制的电力拖动系统,运行效果很好,但价格昂贵,需花费大量外汇,明显不适应我国市场经济的发展需求;另一方面,国内相关行业科研单位和生产厂家也开始对提升机全数字控制技术进行研究开发,但绝大部分所走的技术路线是购买国外通用全数字控制器,然后自己组装调试,没有独立的知识产权,时刻被国外公司牵制,仍未从根本上解决问题。
由于全自动化控制系统的安全可靠运转,具有“异步电机+转子串电阻加速+高压接触器换向+动力制动减速+继电器控制”的传统控制方式和“发电机+电动机机组+继电器控制”控制方式无法比拟的优点,因此国外发达国家在各工业领域大力发展全自动控制技术。
就矿井提升机拖动控制而言,德国西门子公司和瑞典ABB公司的全自动控制系统代表了世界领先水平。
我国近年来引进的提升机中,98%是西门子和AB的产品。
但是近年来,随着我国电力电子技术的发展,我国也在在这一领域做了大量卓有成效的研究,开发了自有知识产权的全数字控制系统,目前己经开发出几套样机。
20 年前,当机电一体提升机在德国鲁姆贝克矿井和雷敦矿井相继取得成功以后,德国因矿业凋敝,没有出现第3 台机电一体提升机。
5年前,当我国准备进口第1 台机电一体提升机时,有人预言,这是提升机结构的发展方向,虽然当时的结构还不算成熟,也应当引进1 、2 台作为借鉴,才不会落后世界潮流太远。
接着就引进了3 台。
大雁提升机结构已有重大改进,陈四楼提升机则得到进一步完善,逐步实现了标准化。
再过二三年,也就是大约用了十年时间,当引进的提升机调试和投产运行取得成功后,就可以说基本完成了这项新技术的开发阶段,标志着这项技术已经成熟。
用机电一体结构逐步代替传统结构的总趋势已不可逆转。
而南非的3 台大型提升机以及澳大利亚和我国准备引进的项目,都实际上已经是这项技术的应用成果了。
我国是世界上矿业大国,有较大的提升机市场,如果以后再要进口,机电一体提升机就自然会成为首选方案,因为这对用户有利。
我国也需要自己开发这项新技术,而这些引进项目的成功,必然会起到重要的促进和借鉴作用。
三、研究内容及实验方案:研究内容:1、滑道式提升机的工艺分析;2、滑道式提升机工作台的运动特性分析;3、滑道式提升机及其控制电路的设计;4、垂直运动的实现与机构设计;5、UG装配体设计及运动分析;6、滑道式提升机及其控制电路的设计运动仿真。
实验方案:1、查阅文献、熟悉课题、撰写开题报告;2、确定滑道式提升机及其控制电路的设计;3、运动及动力参数计算;4、根据课题要求设计工作台尺寸及零、部件强度计算;5、用UG画出零、部件三维图并总装;6、工作台运动仿真。
四、目标、主要特色及工作进度设计一套滑道式提升机的工作台,并对工作台的运动特性、工作进行分析。
考虑到提升机设备的研究发展状况,针对中小型提升机生产企业的现实需求,设计开发滑道式设备时,必须满足低成本、高效率的要求。
所以,在设计开发此提升机设备时,力求结构简单紧凑、功能实用齐备、速度快、精度高、通用性强而且维修方便。
1.查阅资料,英文资料翻译(2周)1月3日~1月17日2.撰写开题报告(1周)1月18日~1月23日3.设计并绘制滑道式提升机的设计装配图(5周)2月21日~3月27日4.绘制主要零件图若干张(4周)3月27日~4月23日5.编写设计计算说明书(毕业论文)一份(3周)4月25日~5月21日6.毕业设计审查、毕业答辩(1.5周)5月23日~ 6月2日五、参考文献[1] 璞良贵,纪名刚主编.机械设计.第七版.北京:高等教育出版社,2001[2] 金国淼等.搅拌设备(化工设备设计全书). 北京:化学工业出版社,2002[3] 徐灏主编,机械设计手册.北京:机械工业出版社,1995.12[4] 李克永.化工机械手册. 天津: 天津大学出版社,1991.5[5] 蔡尚峰.自动控制设备[M].北京:机械工业出版社,1981.[6] 黄仰金.矿山副井提升机计算机控制系统的设计及应用[J].科技资讯,2004.滑道式提升机及其控制电路的设计摘要:矿山生产的全过程离不开矿山运输和提升工作。
因此,运输和提升工作的好坏直接关系到矿山生产能否正常高效进行。
如果说运输线路是矿山生产的动脉,那提升设备则是其咽喉,可见其重要性和必要性。
肥料对于农作物的作用非常重要,随着耕地面积的不断减少,粮食的产量显得尤其重要。
因此,肥料的生产非常重要。
BB肥料(Blending bulk fertilizer)根据作物需肥规律和土壤供肥特性进行配制,含氮、磷、钾三种元素,也可根据作物需要添加中、微量元素。
BB肥料具有如下优点,一是养分配比灵活科学合理,可以根据不同作物进行调配;二是价格便宜,同等养分的BB 肥料比进口复合肥料便宜;三是配送方便。
提升机为通过改变势能进行运输的机械设备。
提升机是一种被普遍采用的垂直输送设备,广泛地应用于建材、电力、冶金、机械、化工、轻工、有色金属、粮食等各工业部门。
可以满足用户对提升机的不同性能要求。
本课题是为了制造BB肥生产提升设备。
主要由提升斗、提升系统、机架等组成。
工作原理:将大颗粒尿素、钾肥、磷肥、填充料等按配方要求比例计算后,分别投入斗式提升机料斗,料斗经由钢丝绳牵引沿着轨道上升,提升到一定高度碰到行程开关,斗门打开,肥料卸下,料斗空载回起点。
关键词:提升机导轨钢丝绳指导老师签名:Producing 4-5 tons of BB fertilizer production equipment to upgrade SystemAbstract: The role of fertilizer for the crops is very important, as the shrinking arable land, grain production is especially important. Therefore, fertilizer production is very important.BB fertilizer (Blending bulk fertilizer) under the laws of crop fertilizer and soil characteristics for the preparation of fertilizer, nitrogen, phosphorus and potassium are three elements can be added according to crop needs, the trace elements. BB fertilizer has the following advantages, first, nutrients and flexible scientific and rational allocation according to different crops; second is cheap, the same nutrients of BB fertilizer compound fertilizer cheaper than imports; third, to facilitate distribution.Hoist by changing the potential energy for the transport of machinery and equipment. Hoist is a widely used vertical transportation equipment, widely used in building materials, electric power, metallurgy, machinery, chemicals, light industry, metals, food and other industries. Meet the different users on elevator performance requirements.The issue is to create BB Fertilizer Production Hoisting Equipment. Mainly by enhancing the Big Dipper, hoisting system, a framework. Works: The large granular urea, potash, phosphate, fillers and other requirements according to the ratio calculation formulas were put bucket elevator hopper, the hopper through the wire rope traction along the track up to a certain height to enhance hit limit switch, open The door , fertilizer unloading, hopper back to the starting point empty.Keywords: BB fertilizer Hoist Guide Track Wire RopeSignature of Supervisor:目录前言 (1)1绪论 (2)1.1各种提升机的工作原理 (2)1.2提升机的简介 (3)1.3提升机的应用 (4)1.4提升机的发展 (5)2 总体方案确定 (6)2.1 总体设计要求 (6)2.2总体设计 (6)2.2.1 工作原理 (6)2.2 .2 总体尺寸综合 (6)2.3 总体图 (6)3提升系统的设计计算 (7)3.1 料斗仓重量计算 (8)3.2 钢丝绳的确定 (9)3.2.1 钢丝绳种类 (9)3.2.2 时效原因 (10)3.2.3 钢丝绳的计算 (10)3.3 提升系统电动机选择 (13)3.3.1 选择电动机类型和结构型式 (13)3.3.2 选择电动机的容量 (14)3.3.3选择电动机的型号 (16)4 提升系统的校核 (17)4.1 导轨校核 (17)4.1.1导轨强度校核 (17)4.1.2 导轨刚度校核 (21)5 机架的设计及校核 (24)5.1 机架结构类型 (24)5.1.1 按机架外形分类 (24)5.1.2 按机架的制造方法和材料分类 (24)5.2 机架结构的选择 (24)5.3 机架设计计算的准则和要求 (25)5.3.1 机架设计的准则 (25)5.3.2 机架设计的一般要求 (25)5.4 机架的形式及主要参数 (25)5.5机架的强度校核 (27)5.6 机架的刚度校核 (31)5.7立柱的强度及稳定性校核 (36)6 检验安装和使用维修 (37)6.1 检验规则 (37)6.2 吊装,安装和调整 (37)6.3 使用操作 (38)6.4 维修保养和故障排除 (38)结论 (39)参考文献 (40)致谢 (41)前言矿山生产的全过程离不开矿山运输和提升工作。