倍加福编码器基础讲解
ENCODER(P+F)倍加福编码器介绍

ENCODER(P+F)倍加福编码器介绍旋转编码器—基础及注意事项P+F FA 2009.03内容一、编码器分类1.1 增量式编码器 1.2 绝对值编码器 1.3 防爆编码器二、编码器选型注意事项2.1 机械因素 2.2 环境因素 2.3 电气因素三、编码器使用注意事项3.1 安装注意事项 3.2 供电注意事项 3.3 软件设置 3.4 屏蔽的铺设2009.03P+F FAPage 2编码器简介什么是旋转编码器?–把旋转机械参数转换为电气信号输出的数字式传感电子设备;–用于旋转或直线等运动的监测,反馈角度、位置、速度和加速度等机械参数。
, ω, n调制光调制电流频率脉冲2009.03P+F FAPage 3一、编码器分类旋转编码器增量型绝对值单圈轴套型实心轴半空轴轴套型实心轴多圈半空轴防爆编码器:隔爆型、本安型、防爆编码器:隔爆型、本安型、无火花型2009.03P+F FAPage 41.1 增量式编码器增量式编码器–轴旋转一定角度,提供相应数量的脉冲;单位时间内的脉冲数可以用来测量轴的转速;–增量式编码器检测旋转中的相对位置变化时,需要一个参考起点,并进行脉冲数的累加;供电或电气受到扰动干扰时,脉冲计数将产生错误;故障停车后,无法找回事故发生时的位置。
–最大分辨率5000PPR,200kHz2009.03P+F FAPage 51.1 增量式编码器–信号输出反向通道–用于抑制噪声干扰,改善了信号的传输可靠性,选型时优先选择6 通道输出的编码器;干扰脉冲信号反向信号耦合后的无干扰信号2009.03P+F FAPage 61.1 增量式编码器–信号输出推挽式输出推挽式输出:组合了NPN和PNP输出方式–提高了脉冲的上升沿宽度,改善了脉冲输出特性;–具有较好的抗干扰能力,高速传输,距离更远;–适用于中等开关频率范围的应用;RS 422 线驱动:数据通过互补的两差分通道进行传输和接收线驱动:–用于干扰较严重的场合或长距离传输;–用来替换TTL输出方式时,不使用反向通道;2009.03P+F FAPage 71.2 绝对值编码器绝对值编码器–不产生脉冲,而是一串数据码,为每一个轴的位置提供一个独一无二的编码数字值;? 减轻了电子接收设备的计算任务;? 当机器合上电源或电源故障后,有位置记忆功能;–单圈分辨率最高16位(65536步) –多圈分辨率最高14位(16384圈),总分辨率30位2009.03P+F FAPage 81.2 绝对值编码器接口分类绝对值编码器–接口分类:接口分类:– SSI – AS-I – CANOPEN – DEVICENET – ETHERNET –并行– PROFIBUS-DP2009.03P+F FAPage 91.3 防爆编码器隔爆型 (Ex d)–隔爆外壳可以承受爆炸性混合气体爆炸产生的压力,并且可以阻止爆炸从壳体内传播到壳体外;–设备可能含有易产生电弧、火花或易燃部件,但能保证爆炸仅限于设备内部;– 1 区防爆,应用于正常运行时可能会出现气体、粉尘形式的爆炸性混合物的场所。
倍加福编码器工作原理及作用

倍加福编码器工作原理及作用工作原理:倍加福编码器基于格雷码的特性进行工作。
格雷码是一种二进制数字系统,其中相邻的两个数值只有一位的差异。
在标准的二进制编码系统中,一次只能修改一位,而在格雷码中,只需改变一位即可得到相邻数值,使其适用于一些需要减少错误的应用场景。
1.通过多个输入端口接收二进制数字。
例如,一个3位的倍加福编码器有3个输入端口(A、B和C)。
2.将输入端口的二进制数字输入到相应的逻辑门(一般是XOR门)中。
3.经过逻辑门的计算,输出对应的格雷码。
例如,在3位的倍加福编码器中,输出端口有3个(D0、D1和D2),分别对应格雷码的1位差异。
4.当输入端口的二进制数字发生变化时,经过逻辑门的计算会得到相应的格雷码。
作用:1.数据记录:倍加福编码器将二进制数字转换为格雷码后,可以在数字电路中进行记录和传输。
由于格雷码的特性,只需改变一位即可得到相邻数值,减少了传输错误的风险。
2.旋转编码器:格雷码在旋转编码器中广泛使用。
旋转编码器是一种输入装置,用于将旋转动作转换为数字信号。
通过使用格雷码,旋转编码器可以准确记录旋转方向和位置。
3.数据转换:倍加福编码器可以将二进制数字转换为格雷码,实现不同数字系统之间的数据转换。
这在数字电路设计和通信系统中非常有用。
4.错误检测和校正:由于格雷码的特性,倍加福编码器可以用于检测和校正传输中的错误。
通过比较输入和输出的格雷码,可以发现和修复传输中发生的错误。
总结:倍加福编码器通过将二进制数字转换为格雷码,实现了数字信号的记录、传输和转换。
它在旋转编码器、数据转换和错误检测等应用中发挥着重要作用。
通过利用格雷码的特性,倍加福编码器提供了更可靠和高效的数字电路解决方案。
ENCODER (P+F) 倍加福编码器介绍
旋转编码器—基础及注意事项P+F FA 2009.03内容一、编码器分类1.1 增量式编码器 1.2 绝对值编码器 1.3 防爆编码器二、编码器选型注意事项2.1 机械因素 2.2 环境因素 2.3 电气因素三、编码器使用注意事项3.1 安装注意事项 3.2 供电注意事项 3.3 软件设置 3.4 屏蔽的铺设2009.03P+F FAPage 2编码器简介• 什么是旋转编码器?– 把旋转机械参数转换为电气信号输出的数字式传感电子设备 ; – 用于旋转或直线等运动的监测,反馈角度、位置、速度和加速 度等机械参数。
ϕ, ω, n调制光调制电流频率脉冲2009.03P+F FAPage 3一、编码器分类旋转编码器增量型 绝对值单圈 轴套型 实心轴 半空轴 轴套型 实心轴多圈 半空轴防爆编码器:隔爆型、本安型、 防爆编码器:隔爆型、本安型、无火花型2009.03P+F FAPage 41.1 增量式编码器• 增量式编码器– 轴旋转一定角度,提供相应数量的脉冲;单位时间内的脉冲数可以用来 测量轴的转速; – 增量式编码器检测旋转中的相对位置变化时,需要一个参考起点,并进 行脉冲数的累加; 供电或电气受到扰动干扰时,脉冲计数将产生错误; 故障停车后,无法找回事故发生时的位置。
– 最大分辨率5000PPR,200kHz2009.03P+F FAPage 51.1 增量式编码器 – 信号输出• 反向通道– 用于抑制噪声干扰,改善了信号的传输可靠性,选型时优先选择6 通道 输出的编码器;干扰脉冲 信号 反向信号 耦合后的无干扰信号2009.03P+F FAPage 61.1 增量式编码器 – 信号输出• 推挽式输出 推挽式输出:组合了NPN和PNP输出方式– 提高了脉冲的上升沿宽度,改善了脉冲输出特性; – 具有较好的抗干扰能力,高速传输,距离更远; – 适用于中等开关频率范围的应用;• RS 422 线驱动:数据通过互补的两差分通道进行传输和接收 线驱动:– 用于干扰较严重的场合或长距离传输; – 用来替换TTL输出方式时,不使用反向通道;2009.03P+F FAPage 71.2 绝对值编码器• 绝对值编码器– 不产生脉冲,而是一串数据码,为每一个轴的位置提供一个 独一无二的编码数字值; ☺ 减轻了电子接收设备的计算任务; ☺ 当机器合上电源或电源故障后,有位置记忆功能; – 单圈分辨率最高16位(65536步) – 多圈分辨率最高14位(16384圈),总分辨率30位2009.03P+F FAPage 81.2 绝对值编码器 接口分类 绝对值编码器–接口分类: 接口分类: – SSI – AS-I – CANOPEN – DEVICENET – ETHERNET – 并行 – PROFIBUS-DP2009.03P+F FAPage 91.3 防爆编码器• 隔爆型 (Ex d)– 隔爆外壳可以承受爆炸性混合气体爆炸产生的压力,并且可以阻止 爆炸从壳体内传播到壳体外; – 设备可能含有易产生电弧、火花或易燃部件,但能保证爆炸仅限于 设备内部; – 1 区防爆,应用于正常运行时可能会出现气体、粉尘形式的爆炸性混 合物的场所。
倍加福编码器

倍加福编码器什么是倍加福编码器?倍加福编码器(Bachofen Encoder)是一种旋转编码器,用于测量旋转运动的角度和速度。
在工业自动化和机器人控制中广泛应用。
倍加福编码器结构简单,由磁性编码器和解码器组成。
其中,磁性编码器通过磁性读取方式,把位置信息编码在磁性柱上;而解码器把磁性柱上的信息解码成数字信号,输出给机器控制系统。
倍加福编码器的工作原理倍加福编码器可以使用两种不同的磁性读取方式:绝对位置读取和增量式读取。
绝对位置读取绝对位置读取方式可以直接读取物体在空间中的位置,无需基于之前的位置。
如下图所示,磁性柱上的不同极性磁性标记被编码成二进制位数,根据标记的排列,可以得到一个唯一的数值。
image-1image-1在读取时,解码器通过磁性读取方式读取磁性柱上的信息,解码成数字信号。
这个数字信号表示物体在绝对空间中的位置。
增量式读取增量式读取方式表示在旋转中读取编码器的信息。
如下图所示,两个磁性柱之间加入了一个光学刻度盘,可以读取旋转的信息。
image-2image-2在旋转时,磁性柱随着旋转移动,产生磁场变化。
解码器通过感应磁场的变化,读取磁性柱的位置和旋转方向。
同时,光学刻度盘也可以读取旋转的信息,以便校正旋转的偏差。
通过这种方式,增量式读取可以提供更准确的位置和旋转速度信息。
倍加福编码器的优点•高精度:倍加福编码器可以提供高精度的位置和旋转信息,用于要求高度精确的场景。
•高分辨率:倍加福编码器可以达到很高的分辨率,常用于要求精度较高的机器控制系统。
•抗干扰:倍加福编码器使用了磁性读取方式,对周围环境的干扰有很强的抵抗能力。
倍加福编码器应用场景•机器人工业:在机器人领域中,倍加福编码器被广泛应用于机器臂、机器人手等机器人部件的位置和旋转的控制。
•汽车工业:在汽车生产线中,倍加福编码器常用于马达和车轮等机械部件的位置和旋转的控制。
•医疗设备:在医疗设备中,倍加福编码器可用于测量扫描设备、医用机器人等设备的位置和旋转信息。
倍加福P+F多圈绝对值编码器PVM58系列技术说明

倍加福P+F多圈绝对值编码器PVM58系列技术说明
倍加福P+F多圈绝对值编码器PVM58系列特点:工业标准外壳∅58 mm PROFIBUS 接口
30 位,多匝
速度传输
更广泛的扩展功能
可编程的限位开关
调试模式
伺服或夹紧法兰
倍加福P+F多圈绝对值编码器PVM58系列技术参数:
检测类型光电采样
设备类型多圈绝对值编码器工作电压10 ... 30 V DC
空载电流最大 230 mA 在 10 V DC 时最大 100 mA 在 24 V DC 时
功耗最大 2,5 W
可用前的时间延迟< 1000 ms
线性度±在 16 位时为 2 LSB,在 13 位时± 1 LSB,在 12 位时输出码二进制码
Code course(计数方向)可编程,
顺时针递增(顺时针旋转,code course 递增)顺时针递减(顺时针旋转,code course 递减)
接口类型PROFIBUS
分辨率
单圈可达 16 Bit
多匝14 Bit。
倍加福绝对值编码器

零位设置 (PRESET) 高 : 10 ... 30 V, 低 : 0 ... 2 V < 6 mA ≥ 10 ms < 1 ms
连接器 9424, 19 针 电缆 Ø9 mm, 12 x 2 x 0.14 mm2, 2 m
订货型号 9401 9404 9409 KW 9101, 10 9102, 10 9103, 10 9112, 10 9108, 10 9109, 10 9110, 10 9113, 10 9203 9213 9401 9402 9404 9409 KW 9300 和 9311-3 9310-3 9424
输入
输入,临时贮存 (LATCH) 输入,置零 (PRESET)
IN
Ue ⊥
滤波 下拉
逻辑
输入电平 : "0" 0 V ... 2 V, "1" 10 V ... 30 V, Ie < 6 mA
输入,计数方向选择 (V/R)
IN
Ue ⊥
上拉 滤波
逻辑
输入 , 计数方向选择 (V/R )
绝对值编码器计数方向是以顺时针旋转计数增大,逆时针旋转计数减少为定义的,计数方向选择可通过输入信号 V/R 来改变。如果输入信号不用,则计 数方向以定义为标准。输入电平为 "1" 脉冲宽度为 T>10 ms。 输入电平 "1" 或不用 = 计数增大当顺时针旋转。 输入电平 "0" = 计数减少当顺时针旋转。
外壳:铝粉涂层 , 法兰:铝 , 轴:不锈钢 外壳:不锈钢 , 法兰:不锈钢 , 轴:不锈钢 约 200 g( 组合 1), 约 400 g( 组合 2) 最大 12000 min-1 30 gcm2 ≤ 5 Ncm 轴向 : 40 N, 径向 : 110 N
倍加福编码器P+F多圈

3 x 120°
ø58 ø50f7
ø6h7 ~33
d** 5
10 3 3 4
R100 ø9
~18
2
ḋᴀݙᆍᬍᯊᘩϡ䗮ⶹ
25 30
Copyright Pepperl+Fuchs, Printed in Germany
多圈绝对值编码器
电气连接
信号 GND ( 编码器 ) Ub ( 编码器 ) 数据位 1 数据位 2 数据位 3 数据位 4 数据位 5 数据位 6 数据位 7 数据位 8 数据位 9 数据位 10 数据位 11 数据位 12 数据位 13 数据位 14 数据位 15 数据位 16 数据位 17 数据位 18 数据位 19 数据位 20 数据位 21 数据位 22 数据位 23 数据位 24 数据位 25 V/R Latch PRESET
5
环境条件 工作温度
储藏温度 机械特性
材料 组合 1 组合 2 (Inox)
重量 旋转速度
瞬时惯量
起动扭矩 轴负载
ḋᴀݙᆍᬍᯊᘩϡ䗮ⶹ
FVM58
10 ... 30 V DC 最大 140 mA ≤ 2.5 W,无输出驱动器 ± 0.5 LSB 格雷码或二进制 CW 递增 (顺时针旋转,码值递增) 0.3 ms
Release date: 2008-06-20 Date of issue: 2008-06-20 T25462_CN.xml
4
ḋᴀݙᆍᬍᯊᘩϡ䗮ⶹ
Copyright Pepperl+Fuchs, Printed in Germany
多圈绝对值编码器
FVM58
订货型号代码
F VM5 8
–
3
德国P+F倍加福(PEPPERL+FUCHS)编码器、接近开关、超声波传感器产品介绍
德国P+F倍加福(PEPPERL+FUCHS)编码器、接近开关、超声波传感器产品介绍德国Pepperl+Fuch(P+F)编码器、Pepperl+Fuch(P+F)传感、Pepperl+Fuch(P+F)接近开关等,德国倍加福P+F编码器广泛应用于数控机床、纺织机械、冶金机械、印刷机械、塑料机械、试验机、电梯、电机、航空、仪器仪表工业自动化等行业,适用于工业装备、设计开发。
光电式旋转Pepperl+Fuch(P+F)编码器通过光电转换,可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出(REP)。
它分为单路输出和双路输出两种。
技术参数主要有每转脉冲数和供电电压等。
单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组A/B相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。
光电式旋转Pepperl+Fuch(P+F)编码器可以用来测量旋转速度,加速度,位置和方向。
编码器可以应用在大量的机械工程行业,例如物料输送、物流和包装行业。
您肯定能够从我们广阔的产品线中找到适合您的应用环境的产品。
在工业自动化领域中,旋转编码器可以被用作测量角度、位置、速度和角速度,通过使用齿条、测量轮以及恒力开度仪我们可以测量直线的运动位置。
旋转编码器可以将机械的输入转换为电气信号,这个电气信号可以通过计数器、转速表、可编程逻辑控制器(例如PLC)和工业计算机进行处理。
大量现货,欢迎来聊!编码器ENI58IL-H10BA5-1024UD1-RC1 编码器RHI90N-0NAK1R61N-01024 编码器RHI90N-0HAK1R61N-01024 编码器ENI58IL-S10CA5-1024UD1-RC1 编码器PVM58N-011AGR0BN-1213编码器AVM58N-011K1RHGN-1213接近开关NBB5-18GM50-E2-V1 接近开关NBB8-18GM30-E2-V1 接近开关NBN4-12GM50-E2-V1 接近开关NBN12-18GM50-E2 接近开关NBB15-30GM50-E2 接近开关NBB2-12GM50-E2 接近开关NBB4-12GM50-E2 传感器LA31/LK31/25/31/115 传感器ML100-55/102/115 接近开关NBB15-30GM50-E2 接近开关NBB2-12GM50-E2 接近开关NBB4-12GM50-E2-V1 传感器UB2000-F42-I-V15 传感器UB2000-F42-U-V15接近开关NBB15-30GM50-E2 接近开关NBB20-U1-Z2 接近开关NBB20-L2-E2-V1 接近开关NBB2-12GM50-E2 接近开关NBN40-L2-E2-V1 传感器UC2000-30GM-IUR2-V15 传感器UC4000-30GM-IUR2-V15 传感器UC6000-30GM-IUR2-V15 传感器UB1000-18GM75-I-V15 传感器ML100-55/95/103 传感器ML100-8-1000-RT/103/115 传感器ML100-8-1000-RT/102/115 传感器ML100-8-H-350-RT/103/115 传感器ML100-8-H-350-RT/102/115 传感器ML100-8-1000-RT/95/103 传感器ML100-8-1000-RT/95/102 传感器ML100-8-1000-RT/103/115 传感器ML100-8-1000-RT/102/115 传感器ML100-55/103/115 传感器ML100-55/102/115 接近开关NBB10-30GM50-E2 接近开关NBB20-U1-A2 接近开关NBB20-U1-Z2 接近开关NBB2-12GM50-E0 接近开关NBN40-L2-A2-V1。
倍加福旋转编码器演示

2个相位差为90度的脉冲A和B 第三通道在扫描码盘的第二圈
July , 2008
Han Dong
技术规范– 差分输出 差分输出:消除干扰
信号
反相信号
July , 2008
Han Dong
干扰
技术规范 – 输出
推挽
July , 2008
Han Dong
RS 422, 线驱动
选型标准
选型标准 – 机械
选择编码器的注意事项: 安装环境的温度范围 碰击 /振动 ? 电源电压? 防护等级 安装方式 (法兰类型, 轴类型, 连轴器) 外形尺寸和轴直径
选型标准 – 电气 最大转速 / 最大反映频率 精度 电缆或者连接器输出 数据传输形式 (via bus, parallel or serial)
旋转编码器
内容总结
介绍 技术规范 产品类型 机械特性 安装说明 选型标准 附件
July , 2008
Han Dong
绝对值编码器 输入信号类型 产品类型 应用
产品介绍
旋转编码器是什么?
是将机械旋转转换成电气脉冲信号的设备。 编码器是被用来测量角度、位置、速度和加速度,旋转和直线运动的监测。
• 怎么测量?
Special Line
Series 20
Series 21
Series 30
Series 60
U want more...
July , 2008
Han Dong
R Line - RHI90
电气参数 – 脉冲数: 最大到 4096 ppr – 输出类型: push-pull or RS 422 interface – 输出频率: 120 kHz – 信号输出: A, B, 0 or A, A, B, B, 0, 0 – 连接方式: 接插件 或者电缆 机械参数 –设计:外形尺寸 Ø87 mm – 轴类型: 轴套型 直径 从16mm 到45mm
倍加福编码器基础讲解
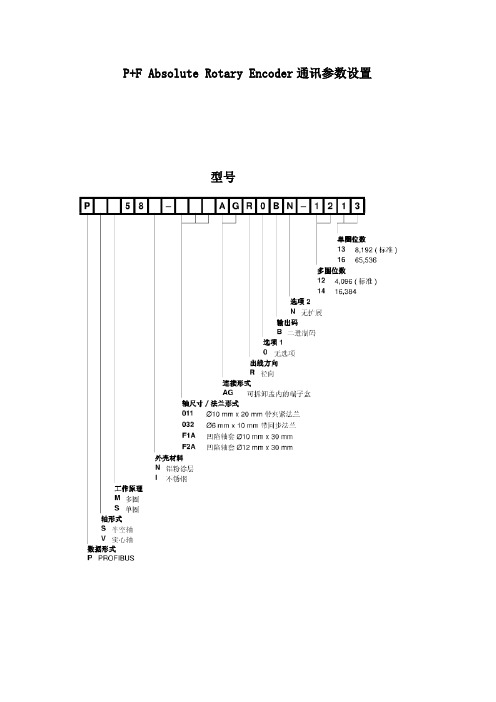
P+F Absolute Rotary Encoder通讯参数设置型号1、地址选择和终端电阻1.1站地址1.2 终端电阻2、信号和电源线的连接3、安装GSD文件GSD文件为电子设备数据库文件,是可读的ASCII码文件。
不同厂家的PROFIBUS产品集成在一起,生产厂家必须以GSD文件方式提供这些产品的功能参数,例如I/O点数、诊断信息、传输速率、时间监视等。
在Step 7 的SIMATIC 管理器中打开硬件组态工具HW Config ,安装GSD后,在右边的硬件目录PROFIBUS DP→Additional Field Devices→Encoders→ENCODER将会出现刚刚安装的P+F Rotary Encoder。
其数据传输原理如图所示。
4、组态通讯参数在Step 7硬件配置窗口中,双击P+F Rotary Encoder 图标,打开编码器(DP Slave)的参数设置窗口,如图所示。
结合工程实际,在此窗口中进行参数设置:a、代码顺序(Code Sequence):计数方向, CW(顺时针旋转,代码增加),CCW (逆时针旋转,代码增加);b、标定功能控制(Scaling function control):只有设置成Enable ,下面c、d和e的设置才会生效;c、单圈分辨率(Measuring units per revolution):8192;d、测量范围高位(Total measuring range(units)hi): 512;e、测量范围低位(Total measuring range(units)lo): 0;f、其它参数采用默认值。
注:1、由c可以计算出编码器每圈产生(=8192)个二进制码,即单圈精度为13位。
2、由d和e可以计算出编码器最大可以转(=512×65536+0)圈,即多圈精度为12位。
5、预置值6、LED状态灯指示信息也可以直接输入十六进制的值,然而,这个非常复杂,建议避免此类操作。
倍加福编码器

6 x M3 ⏅6
25.5
M4 㶎ϱ
DIN 912
48.5
11.3
39.5 7
ø87.1
18.7° 65
ø59 ... ø70
5.5 15
30
3x12700°°
ዡ༫
ø4.5
20.7 R100
18.7°
䱨ᷣ PG7/PG9, ᕘ
25.5
M4 㶎ϱ DIN 912
电气连接
信号 GND Ub A B A B 0 0 屏蔽 NC
6 5 V, RS 422
信号输出
6 A+B+0和A+B+0
出线方向
R 径向
连接形式
AA 插头连接器 9416, 12 针
AB 插头连接器 9416L, 12 针
K1 电缆 Ø7.8 mm, 4 x 2 x 0.14 mm², 1 m
法兰形式
A 轴套型
轴尺寸
0E 轴套 Ø16 mm
0F 轴套 Ø20 mm
ḋᴀݙᆍᬍᯊᘩϡ䗮ⶹ
Copyright Pepperl+Fuchs, Printed in Germany
3
0G 轴套 Ø24 mm
0H 轴套 Ø25 mm
0I
轴套 Ø30 mm
0L 轴套 Ø38 mm
0N 轴套 Ø45 mm
外壳材料
N 铝 , 无涂层
100, 360, 500, 512, 1000, 1024, 1250, 2048, 2500
Release date: 2008-06-20 Date of issue: 2008-06-20 T21664_CN.xml
增量型编码器
倍加福绝对值编码器

输出码 二进制码 格雷码
出线方式 轴向 径向
连接型式 Cable 插头连接器 9416,12 - 针 插头连接器 9416 L,12 - 针
轴尺寸 / 法兰型式 凹陷轴套 凹陷轴套
外壳材料 铝粉涂层 不锈钢★
* 外壳材料为不锈钢时出线仅可选轴向
样本内容更改时恕不通知
德国P+F公司 2034
电话:上海(021)56525989(总机) 传真:(021)56527164 网址:www.pepperl-fuchs.com.cn
10 ... 30 V 0 ... 2 V < 6 mA < 0,001 ms
9416, 12-针 9416L, 12-针 Φ7 mm, 6 x 2 x 0.14 mm2, 1 m
DIN EN 60529, IP65 DIN EN 60068-2-3, 无凝露 DIN EN 50081-1 DIN EN 61000-6-2 DIN EN 60068-2-27, 100 g, 3 ms DIN EN 60068-2-6, 10 g, 10 ... 20016★ ,径向 轴密封增加长度
电缆密封套 PG 9, 轴向
最大插入 深度 = 30 最小插入 深度 = 15
凹陷轴套
电缆密封套 PG 9, 径向
轴密封增加长度 3mm
样本内容更改时恕不通知
德国P+F公司 2030
电话:上海(021)56525989(总机) 传真:(021)56527164 网址:www.pepperl-fuchs.com.cn
电气连接
信号 编码器 编码器 时钟 (+) 时钟 (-) 数据 (+) 数据 (-) 备用 V / R 备用 备用 备用 备用
倍加福编码器

ø48 30˚
ø42 60˚
电气连接
信号 GND Ub A B A B 0 0 Ub Sens 报 警 屏 蔽 NC GND Sens
电 缆 Ø7.8 mm, 12芯 连接器 9416, 12针
白
£ 25 gcm²
£ 25 gcm²
£ 25 gcm²
£ 1.5 Ncm
£ 1.5 Ncm
£ 1.5 Ncm
40/10 N 在最大速度. 6000 min-1/ 最大 . 12000 min-1
60/20 N 在最大速度. 6000 min-1/ 最 大速度. 12000 min-1
40/10 N 在最大速度. 6000 min-1/ 最大 . 12000 min-1
25 % ± 10 %
0 0
附件
型号
附 件
命名/规定特性
订货代码
D1: Ø10 mm, D2: Ø10 mm
9401
连轴器
D1: Ø10 mm, D2: Ø10 mm D1: Ø10 mm, D2: Ø10 mm
9404 9409
D1: Ø10 mm, D2: Ø10 mm
KW
3 x 120˚
增量型旋转编码器 RVI 58
3 x 120˚
RVI 58
外形尺寸
(76)
22
ø48
0.05 A
20 10
46
-0.01 -0.02
ø58
A
ø10
ø36f8
54
0.2 A
夹紧法兰
0.05 A
10 4 3 3
(66) (52) 46
倍加福增量编码器中文说明书

倍加福增量编码器中文说明书一、工作原理在编码器的工作过程中,当光源照射到光盘上时,光电传感器会检测到光线经过光盘上的透明刻度线并形成一个脉冲信号。
这个脉冲信号的数量和频率与旋转的角度和速度成正比。
通过对这些脉冲信号进行计数和处理,我们可以获得准确的旋转位置和旋转速度的信息。
二、特点和优势1.高精度:倍加福增量编码器能够提供高精度的旋转测量,其分辨率可达到亚微米级别,满足了很多精密测量的需求。
2.高可靠性:该编码器采用光电原理,具有抗干扰性强、工作稳定的特点,能够在恶劣环境下长时间稳定工作。
3.高速度:倍加福增量编码器能够实时测量高速旋转运动,其响应速度可以达到几百万转/分钟。
4.体积小巧:该编码器具有紧凑的设计和结构,体积小巧,便于安装和集成到各种设备中。
5.简化系统:采用倍加福增量编码器可以简化系统结构,减少设备的复杂性和成本。
三、应用领域1.数控机床:在数控机床中,增量编码器被用于实时监测和控制机床的运动状态,使得机床能够准确执行各种切削操作。
2.机器人:增量编码器是机器人关节和末端执行器的重要部件,能够帮助机器人实现高精度和高速度的运动。
3.电子设备:在电子设备中,增量编码器被广泛应用于自动调焦、平移台的控制、光学测量等领域,提高了设备的精度和性能。
4.运动控制系统:倍加福增量编码器被用于实时监测运动的位置和速度,使得运动控制系统能够更加准确地控制和调节运动。
总结:倍加福增量编码器是一种用于测量旋转运动的装置,具有高精度、高可靠性和高速度等特点。
它被广泛应用于数控机床、机器人、电子设备等多个领域,帮助提高设备的精度和性能,实现自动化控制和调节。
随着技术的不断发展,倍加福增量编码器将继续在各个领域发挥重要作用。
编号倍加福编码器初始值设定方法
倍加福编码器初始值设定方法
在大型龙门吊的大车纠偏及起升高度的调试过程中,经常遇到绝对值编码器的初始值与自己的期望值差距很大,从而导致需要一个个编码器的手动转,使其达到自己的需要值,如果编码器损坏又得重复这个繁琐的过程,通过与同事讨论及实践,总结出了倍加福编码器初始值的设定方法,从而减轻了大家的劳动强度;
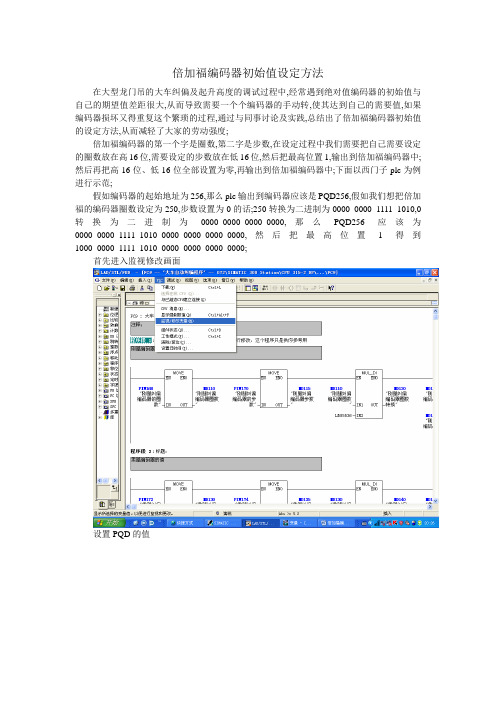
倍加福编码器的第一个字是圈数,第二字是步数,在设定过程中我们需要把自己需要设定的圈数放在高16位,需要设定的步数放在低16位,然后把最高位置1,输出到倍加福编码器中;然后再把高16位、低16位全部设置为零,再输出到倍加福编码器中;下面以西门子plc为例进行示范;
假如编码器的起始地址为256,那么plc输出到编码器应该是PQD256,假如我们想把倍加福的编码器圈数设定为250,步数设置为0的话;250转换为二进制为0000_0000_1111_1010,0转换为二进制为0000_0000_0000_0000,那么PQD256应该为0000_0000_1111_1010_0000_0000_0000_0000,然后把最高位置1得到1000_0000_1111_1010_0000_0000_0000_0000;
首先进入监视修改画面
设置PQD的值
然后修改编码器的值
然后把编码器值设置为零
然后编码器的圈数就变成了250.步数就变成了0.
方法二、通过程序来修改编码器的初始值,1000_0000_1111_1010_0000_0000_0000_0000转换成十进制为-48;那么通过程序修改如下图所示:。
编号倍加福编码器初始值设定方法
编号倍加福编码器初始值设定方法编号倍加福编码器是一种用于将数字信息进行编码的设备,它通过将数字信息转换为二进制码,并进行倍增处理,以增加数据的安全性和可靠性。
在使用编号倍加福编码器之前,需要进行初始值设定,以确保编码过程的准确性和正常运行。
以下是一种初始值设定方法,详细介绍如下。
1.确定编码器的位数:首先需要确定使用的编号倍加福编码器的位数。
位数的确定由编码器所需编码的信息范围决定。
如果需要编码的信息范围较大,则需要使用更多的位数来表示,以确保所需的数字都可以正确编码。
2.确定编码器的起始值:起始值是指编码器的初始计数值,在开始编码之前,需要将编码器的值设置为起始值。
起始值可以根据具体的需求进行设定。
一般情况下,起始值可以设置为0或者任意其他值,但需要保证所选择的起始值能够准确地表示所需编码的信息。
3.确定编码器的倍增率:倍增率是指每次增加的步长,通过将起始值按照倍增率进行逐步增加,可以得到编码器接下来的计数值。
倍增率一般为一个固定的数值,可以根据具体需求进行设定。
一般情况下,倍增率在2到10之间取值,较小的倍增率可以获得更精确的编码,而较大的倍增率可以获得更快的编码速度。
4.根据起始值和倍增率进行编码:当编码器的起始值和倍增率确定后,就可以开始进行编码操作。
首先将起始值设置给编码器,然后通过倍增率逐步增加编码器的值,得到不同的计数值作为编码结果。
编码结果可以通过将计数值转换为二进制码来表示,从而获得最终的编码结果。
5.编码结果的使用:经过编码后,可以将编码结果用于数据传输、存储或其他需要的应用场景中。
编码结果可以通过解码器进行解码,还原为原始的数字信息。
在解码过程中,需要使用与编码器一致的初始值和倍增率,以确保解码的准确性。
总结:初始值设定是使用编号倍加福编码器的重要步骤,可以通过确定位数、起始值、倍增率来设定初始值。
编码器按照倍增率进行计数,得到编码结果,可以用于数据传输和存储。
在解码过程中,需要使用相同的初始值和倍增率进行解码,以确保解码的准确性。
P+F倍加福编码器选型教学内容
P+F倍加福编码器选型教学内容P+F倍加福编码器选型P+F倍加福编码器说明书旋转编码器可以用来测量旋转速度,加速度,位置和方向。
BEN 编码器可以应用在大量的机械工程行业,例如物料输送、物流和包装行业。
在工业自动化领域中,旋转编码器可以被用作测量角度、位置、速度和角速度,通过使用齿条、测量轮以及恒力开度仪我们可以测量直线的运动位置。
旋转编码器可以将机械的输入转换为电气信号,这个电气信号可以通过计数器、转速表、可编程逻辑控制器(例如PLC)和工业计算机进行处理。
随着高性能高速运转机器的不断制造,工业电机、设备、厂房系统的制造商们将注意力都集中在了机器安全的问题上。
工业机器人和自动送料系统的使用会对操作人员产生潜在的危险和风险。
为响应这一危险局势,倍加福制定了一系列认证的旋转编码器,利用创新的理念使系统集成更为经济。
新的思想利用传感器组件和工厂控制系统之间现有的通信路径简化了他们的应用,从而使BEN编码器可以应用在安全等级高达SIL3 的工厂中(符合IEC 61508)主要系列有RVI58N-011K1R61N-01024 RVI78N-10CK2A31N-01000RVI50N-09BK0A3TN-01024RVI58N-011K1R61N-01000RVI50N-09BK0A3TN-01000PVM58N-011AGR0BN-1213编码器P+F编码器PEPPERL+FUCHS P+F AVM58N-011AAROBN-1212PEPPERL+FUCHS P+F RVI50N-09BK0A3TN-01000PEPPERL+FUCHS P+F AVS58N-011AAROGN-0012RVI50系列我上海精芬销售倍加福全系列产品,价格最优。
产品介绍:RVI50系列编码器展示图片:RVI58系列产品介绍:展示图片:详细说明:WCS3B-LS246位置编码器/工控系统展示图片:详细说明:DVM58系列产品介绍:倍加福编器DVM58系列现货特价展示图片:详细说明:RHI58系列产品介绍:倍加福编码器RHI58系列大量现货特价展示图片:详细说明:倍加福编码器RHI58系列大量现货特价RHI58N-**AK1R**N-******轴尺寸:0A 轴套直径10mm0B轴套直径12mm*信号输出:6 A+B+Z*输出电路:1:10-30V6:5V RS-422X: 10-30V RS-422****脉冲数:100、360、500、512、1000、1024、1250、2000、2048、2500、3600、4096、5000RHI90N系列产品介绍:展示图片:详细说明:倍加福系列编码器精芬机电大量库存现特价PVM58N-011AGR0BN-1213PVM58N-032AGR0BN-1213PVM58N-021AGR0BN-1213PVM58N-022AGR0BN-1213PVM58N-011AZR0BN-1213PSM58N-F3AAGR0BN-1213FVS58N-011K2R3GN-0013PVM58N-011AGR0BN-1213PVI58N-011AGR0BN-1213RVI50N-09BK0A3TN-01000RHI90N-0HAK1R61N-01024RHI90N-0HAK1R61N-01024RVI50N-09BK0A3TN-01000RVI58N-011K1R61N-01024PVM58系列产品介绍:PVM58N-011AGROBN-1213大量库存展示图片:详细说明:常用型号PVM58N-011AGROBN-1213 大量现货卷板机恒力开度仪SL3002-X1/GS80/K/01 links 产品介绍:SL3002-X1/GS80/K/01 links展示图片:详细021介绍39536219SL3002-X1/GS80/K/01 rechts SL3002-X1/GS80/K/01 links SL3002-X1/GS80-200。
倍加福编码器应用桂伦与您分享

上海桂伦与您分享编码器领域应用及原理1,编码器是将信号或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备,按照工作原理编码器可分为增量式和绝对式两类。
是将位移转换成周期性的电信号,再把这个电信号转变成计数,用脉冲的个数表示位移的大小,的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
2,我们倍加福里常用的增量型编码器有:10、20、30,RVI50-09B、RVI58N、RVI78N、RHI58、RHI90,最简单的区别方式就是脉冲数,类似于50,100,360,500 600 720 1000 1024等等一些数值也就是脉冲的个数。
3,常用的绝对值编码器有:AVM58N AVS58N DVM58N DVS58N FVM58N FVS 58N PVM58N PVS58N 简单的辨别方式是绝对值编码器最后的数值一般是0012 0013 1212 1213 0016 0014 等等,也就是不外乎00 12 13 14 16 这些数值组成的。
4,2,按照设计和安装来分类,分为空心轴编码器和实心轴编码器,5,增量型编码器空心轴一般由H表示,实心轴由V表示,其中系列为实心轴编码器。
6,常用的绝对值编码器一般是实心的也就是V表示,也有部分少见的凹陷轴套型一般用”S”表示例如ASM58,CSM58等。
7,绝对值编码器又分为单圈绝对值编码器和多圈绝对值编码器,单圈用S表示,例如AVS58N,DVS58N,FVS 58N等且末尾的数值一般是00XX,多圈用M表示,例如AVM,DVM,FVM。
末尾一般是数值1213,1212,等。
8,另外多圈绝对值里对首字母的描述有一定的意义,A表示SSI同步串行接口,D表示Devicenet 数据格式这个很少用,F 表示带并行接口,P表示PROFIBUS总线系统。
9,编码器的选型,一般要掌握以下参数,外径尺寸,内径尺寸(实心轴一般是10MM用011表示,8MM用09表示,6MM用032表示,也有12MM例如30系列,很少用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P+F Absolute Rotary Encoder通讯参数设置
型号
1、地址选择和终端电阻1.1站地址
1.2 终端电阻
2、信号和电源线的连接
3、安装GSD文件
GSD文件为电子设备数据库文件,是可读的ASCII码文件。
不同厂家的PROFIBUS产品集成在一起,生产厂家必须以GSD文件方式提供这些产品的功能参数,例如I/O点数、诊断信息、传输速率、时间监视等。
在Step 7 的SIMATIC 管理器中打开硬件组态工具HW Config ,安装GSD后,在右边的硬件目录PROFIBUS DP→Additional Field Devices→Encoders→ENCODER将会出现刚刚安装的P+F Rotary Encoder。
其数据传输原理如图所示。
4、组态通讯参数
在Step 7硬件配置窗口中,双击P+F Rotary Encoder 图标,打开编码器(DP Slave)的参数设置窗口,如图所示。
结合工程实际,在此窗口中进行参数设置:
a、代码顺序(Code Sequence):计数方向, CW(顺时针旋转,代码增加),CCW (逆时针旋转,代码增加);
b、标定功能控制(Scaling function control):只有设置成Enable ,下面
c、d和e的设置才会生效;
c、单圈分辨率(Measuring units per revolution):8192;
d、测量范围高位(Total measuring range(units)hi): 512;
e、测量范围低位(Total measuring range(units)lo): 0;
f、其它参数采用默认值。
注:1、由c可以计算出编码器每圈产生(=8192)个二进制码,即单圈精度为13位。
2、由d和e可以计算出编码器最大可以转(=512×65536+0)圈,即多圈精度为12位。
5、预置值
6、LED状态灯指示信息
也可以直接输入十六进制的值,然而,这个非常复杂,建议避免此类操作。